Embed Size (px)
Citation preview

Chapter 16:
Discrete-Time Fourier Transform
Chapter 18:
System Function, the Frequency
Response
Copyright © 2014 McGraw-Hill Education. Permission required for reproduction or display .
Scope SMJE2053:
Ch.16, 16.1~4, 16.6, Problems16.14: Questions 1., 6.a., 12.a. b.
Ch.18, 18.1~4, 16.6, Problems18.13: Questions 20.(Mod.), 21.a.
Week 12
(SMJE2053;2014/2015_2)

Signal Transform Family
Copyright © 2014 McGraw-Hill Education. Permission required for reproduction or display
Signals
Continuous-time
Discrete-time
non-periodic
Fourier Transform
Discrete-time Fourier Transform
(DTFT)
finite,
periodic
Fourier Series
Discrete Fourier Transform
(DFT), FFT*
System/
Control
Laplace transform
X(s)
z-transform
X(z)
*: FFT is a fast algorithm of DFT

( ) j n
n
X x n e
DTFT
16.1 Definition
The DTFT is a complex function and can be
represented by its magnitude and phase
Magnitude Phase 𝜃 𝜔 = ∠𝑋(𝜔)

13-4
DTFT is Periodic DTFT 𝑋(𝜔) is periodic with period 2π because
𝑋(𝜔) is specified by
𝑋 𝜔 − 𝜋 ≤ 𝜔 < 𝜋
(When the DTFT is expressed in terms of f
(𝜔 = 2𝜋𝑓), the period of f is 1 Hz and
𝑋 𝑓 = 𝑋(𝜔)𝜔=2𝜋𝑓
may be specified for −0.5 < 𝑓 < 0.5

13-5
IDTFT, The Inverse of DTFT
The inverse of the DTFT may be found from
Copyright © 2014 McGraw-Hill Education. Permission required for reproduction or display

16.2 Examples of DTFT
Example 16.1a. Find the DTFT of the unit-
sample signal x(n)=d(n)
Solution: 𝑋 𝜔 = 1
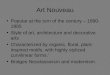
Example 16.1b. Find the DTFT and plot its
magnitude given
𝑥 𝑛 = 1
2,
0,
𝑛 = −1,1𝑒𝑙𝑠𝑒𝑤ℎ𝑒𝑟𝑒
Solution:
𝑋 𝜔 =1
2𝑒𝑗𝜔 +
1
2𝑒−𝑗𝜔 = cos𝜔

13-7
𝑋 𝜔 = cos𝜔
𝑥(𝑛)
−𝜋 0 𝜋 𝜔
Example 16.1b.

12-8 Copyright © 2014 McGraw-Hill Education. Permission required for reproduction or display
Quiz 1 Find the DTFT given
𝑥 𝑛 = 0.5𝑑 𝑛 + 1 + 𝑑 𝑛 + 0.5𝑑 𝑛 − 1
𝑋 𝜔 = 1 + cos𝜔
−𝜋 0 𝜋
𝜔

Examples (Cont.)
Example 16.3a. Find the DTFT and its
magnitude and phase of 𝒙 𝒏 = 𝒂𝒏𝒖(𝒏)
Solution:
𝑋 𝜔 = 𝑎𝑛𝑒−𝑗𝜔𝑛
∞
𝑛=0
= 𝑎𝑒−𝑗𝜔𝑛
∞
𝑛=0
=1
1 − 𝑎𝑒−𝑗𝜔=
1
1 − 𝑎 cos𝜔 + 𝑗𝑎 sin𝜔
𝑋(𝜔) =1
(1 − 𝑎 cos𝜔)2+(𝑎 sin𝜔)2
𝜃 𝜔 = −𝑡𝑎𝑛−1𝑎 sin𝜔
1 − 𝑎 cos𝜔
Magnitude:
Phase:

13-10
j
1
1 0.8e
ω
ω
Example 𝛼 = 0.8

13-11
16.3 The DTFT and the z-Transform
Copyright © 2014 McGraw-Hill Education. Permission required for reproduction or display
DTFT:
z-transform:

13-12
Magnitude response 1
1X(z)
1 0.8z
z-transform of 𝑥 𝑛 = 0.8 𝑛𝑢(𝑛)
DTFT
(magnitude)

13-13
Phase response
1
1X(z)
1 0.8z
z-transform of 𝑥 𝑛 = 0.8 𝑛𝑢(𝑛)
DTFT (phase)

16.4 Inverse DTFT (IDTFT) Example
Example 16.8. Find the inverse DTFT of
Solution.

13-15 Figure 16.3. X(ω) (upper) and x(n) (lower).
−𝜋 0 𝜋
𝑋(𝜔)
𝑥(𝑛)

13-16
16.6 Properties of DTFT
Copyright © 2014 McGraw-Hill Education. Permission required for reproduction or display
Linearity:
Time shift:
𝑎𝑥 𝑛 + 𝑏𝑦 𝑛
𝑥 𝑛 − 𝑘
𝑎𝑋 𝜔 + 𝑏𝑌 𝜔
𝑒−𝑗𝑘𝜔𝑋 𝜔
Convolution: 𝑥 𝑛 ∗ 𝑦 𝑛 𝑋 𝜔 ∙ 𝑌 𝜔
𝑥(𝑛)
∞
𝑛=−∞
= 𝑋(0) Zero frequency

Copyright © 2014 McGraw-Hill Education. Permission required for reproduction or display
Quiz 2
Find the DTFT of given signal
𝑥 𝑛 = 𝑑 𝑛 − 5 + 𝑑(𝑛 + 5)

13-18
1. Find the DTFT of
𝑥 𝑛 = 1,0,
𝑛 = −1,0,1𝑒𝑙𝑠𝑒𝑤ℎ𝑒𝑟𝑒
and plot its amplitude for −𝜋 ≤ 𝜔 < 𝜋
16.14 Problems
6. a.
Find the DTFT of
𝑥 𝑛 = 1,0,
𝑛 = 0,1𝑒𝑙𝑠𝑒𝑤ℎ𝑒𝑟𝑒
12. a. b.
Find the DTFT of 𝑥 𝑛 = 𝛼𝑛𝑢(𝑛) and plot its magnitude
for
a. 𝛼 = 0.95 , b. 𝛼 = 0.5

13-19
Chapter 18:
System Function, the Frequency Response
ℎ(𝑛) 𝑥(𝑛) 𝑦(𝑛)
■ Besides of unit-sample response h(n)
System function and Frequency Response
are also specify the LTI system
LTI system

13-20
18.1 The System Function H(z)
Fact 1: H(z) is the z-transform of unit-sample
response h(n)
Fact 2: H(z) is the ratio Y(z)/X(z)
Fact 3: H(z) is found from the Difference
Equation and vice versa.

13-21 21
Fact 1: H(z) is the z-transform of unit-sample
response h(n)
Example 18.1A
The unit-sample response of an LTI system is
ℎ 𝑛 = 𝑎𝑛𝑢(𝑛). Find its system function
Solution
System Function
𝐻 𝑧 =1
1−𝑎𝑧−1
ℎ 𝑛 = 𝑎𝑛𝑢(𝑛)

13-22
Example 18.3 Find the system function of the LTI system with the
given input-output pair.
𝑥 𝑛 = 1, 1, 1 , y 𝑛 = 1, 3, 4, 3, 1
Solution : In the z-domain the input-output pair is
𝑋 𝑧 = 1 + 𝑧−1 + 𝑧−2 ,
𝑌 𝑧 = 1 + 3𝑧−1 + 4𝑧−2 + 3𝑧−3 + 𝑧−4
By long division we obtain the system function
𝐻 𝑧 =𝑌(𝑧)
𝑋(𝑧)=
1 + 3𝑧−1 + 4𝑧−2 + 3𝑧−3 + 𝑧−4
1 + 𝑧−1 + 𝑧−2
= 1 + 2𝑧−1 + 𝑧−2
Fact 2: H(z) is the ratio Y(z)/X(z)

13-23
Example 18.5A An LTI system is described by the input-output difference
equation
𝑦 𝑛 = −0.3𝑦 𝑛 − 1 − 0.4𝑦 𝑛 − 2 + 𝑥(𝑛) Find the system function
Solution
By transforming both sides of the difference equation above
𝑌 𝑧 = −0.3𝑧−1𝑌(𝑧) − 0.4𝑧−2𝑌(𝑧) + 𝑋(𝑧) 1 + 0.3𝑧−1 + 0.4𝑧−2 𝑌 𝑧 = 𝑋 𝑧
Therefore, the system function is given by
𝐻 𝑧 =1
1 + 0.3𝑧−1 + 0.4𝑧−2
Fact 3: H(z) is found from the Difference
Equation and vice versa.

13-24
Example 18.6 (modified)
Find the input-output difference equation of an LTI system
with the system function
𝐻 𝑧 =𝑌(𝑧)
𝑋(𝑧)=
1 − 0.3𝑧−1
1 − 0.7𝑧−1 + 0.2𝑧−2
Solution
1 − 0.7𝑧−1 + 0.2𝑧−2 𝑌 𝑧 = (1 − 0.3𝑧−1)𝑋 𝑧
𝑌 𝑧 = 0.7𝑧−1𝑌 𝑧 − 0.2𝑧−2𝑌 𝑧 + 𝑋 𝑧 − 0.3𝑧−1𝑋(𝑧) Thus, we have 𝑦 𝑛 = 0.7𝑦 𝑛 − 1 − 0.2𝑦 𝑛 − 2 + 𝑥 𝑛 − 0.3𝑥(𝑛 − 1)

13-25 Copyright © 2014 McGraw-Hill Education. Permission required for reproduction or display
Quiz 3
An LTI system is described by the input-output
difference equation
𝑦 𝑛 = −𝑦 𝑛 − 1 + 𝑥 𝑛 − 𝑥(𝑛 − 1) Find the system function
Solution
By transforming both sides of the difference equation above
𝑌 𝑧 = −𝑧−1𝑌 𝑧 + 𝑋 𝑧 − 𝑧−1𝑋(𝑧) 1 + 𝑧−1 𝑌 𝑧 = (1 − 𝑧−1)𝑋 𝑧
Therefore, the system function is given by
𝐻 𝑧 =1 − 𝑧−1
1 + 𝑧−1

13-26
18.2 Poles and Zeros
• In this section the system function
represented by a function of 𝒛−𝟏 is
converted into the equivalent system
with H(z)=B(z)/A(z), where A(z) and B(z)
are polynomials in z.
• The roots of the numerator are called
zeros of the system.
• The roots of the denominator are called
poles of the system.
Copyright © 2014 McGraw-Hill Education. Permission required for reproduction or display

13-27
Example 18.10 (modified)
Find the poles and zeros of the following system function.
a. 𝐻 𝑧 = 1 + 𝑧−1 + 𝑧−2
b. 𝐻 𝑧 =1−0.3𝑧−1
1−0.7𝑧−1+0.2𝑧−2
Solution
a. 𝐻 𝑧 =𝑧2+𝑧+1
𝑧2
Zeros of H(z): 𝑧2 + 𝑧 + 1=0 𝑧 =−1± 12−4×1
2= −
1
2± 𝑗
3
2
Poles of H(z): 𝑧2 = 0 z=0 (double roots)
b. 𝐻 𝑧 =𝑧2−0.3𝑧
𝑧2−0.7𝑧+0.2
Zeros of H(z): 𝑧2 − 0.3𝑧=0 z=0, 0.3
Poles of H(z): 𝑧2 − 0.7𝑧 + 0.2=0 𝑧 =0.7± (−0.7)2−4×0.2
2
= 0.35 ± 𝑗0.28

13-28
Quiz 4
Find the poles and zeros of the following system function
𝐻 𝑧 =1 + 0.2𝑧−1
1 − 𝑧−1 + 0.5𝑧−2

13-29
18.3 The Frequency Response 𝑯(𝝎)
𝑯 𝝎 : frequency response of the system.
■ DTFT of the unit-sample response h(n) of
the system,
■It can be found from the system function H(z).
Definition
𝑥 𝑛 = 𝑒𝑗𝜔𝑛 𝑦 𝑛 = 𝐻(𝜔)𝑒𝑗𝜔𝑛
LTI system
𝐻(𝜔)

13-30
Response for sinusoidal
Copyright © 2014 McGraw-Hill Education. Permission required for reproduction or display
LTI system
𝐻(𝜔)
cos𝜔𝑛 𝐻(𝜔) cos(𝜔𝑛 + 𝜃)

13-31
Example The frequency response of an system with the system
function 𝐻 𝑧 =1
2+ 𝑧−1 +
1
2𝑧−2 (ℎ 𝑛 = {
1
2, 1,
1
2} )
is given by 𝐻 𝜔 = 𝑒−𝑗𝜔(1 + cos𝜔), where the
magnitude response: 𝐻(𝜔) = 1 + cos𝜔, θ 𝜔 = −𝜔.
Find the response of the system to the input
a. 𝑥 𝑛 = 1
b. 𝑥 𝑛 = cos(𝜋
2𝑛)
c. 𝑥 𝑛 = cos(𝜋𝑛)

13-32
Solution For the input 𝑥 𝑛 = cos(𝜔𝑛), the output of the system with magnitude
response of 𝐻(𝜔) and the phase response of 𝜃(𝜔) is given by
𝑦 𝑛 = 𝐻(𝜔) cos(𝜔𝑛 + 𝜃(𝜔))
a. Here 𝑥 𝑛 = 1 = cos 0 ∙ 𝑛, and 𝐻(0) = 1 + cos 0 = 2, θ 0 = 0,
𝑦 𝑛 = 𝐻(0) cos 0 ∙ 𝑛 + θ 0 = 2
b. From 𝐻(𝜋
2) = 1 + cos
𝜋
2= 1, 𝜃
𝜋
2= −
𝜋
2,
𝑦 𝑛 = 𝐻(𝜋
2) cos
𝜋
2𝑛 + θ
𝜋
2= cos(
𝜋
2𝑛 −
𝜋
2) = sin(
𝜋
2𝑛)
c. From 𝐻 𝜋 = 𝑒−𝑗𝜋 1 + cos 𝜋 = 0, 𝑦 𝑛 = 𝐻(𝜋) cos 𝜋𝑛 + θ 𝜋 = 0

13-33
20. (Modified in part)
a. Find the system function given the following difference
equation:
𝑦 𝑛 = 0.2𝑦 𝑛 − 1 + 𝑥(𝑛) b. Find the magnitude and phase of the frequency response
for 𝜔 = 𝜋.
c. Find the output to the input 𝑥 𝑛 = cos(𝜋𝑛).
21. a.
The unit-sample response of a discrete-time system is
ℎ 𝑛 = 1, 2, 1 . Find and plot 𝐻 𝜔 over −𝜋 ≤ 𝜔 < 𝜋
18.13 Problems

13-34
HOMEWORK (Due: 18/May/2015 13:00PM)
Hamada office 05.38.01 MJIIT Level 5
Chapter 16
Problem 6.a
Chapter 18
Problem 20. (Modified)


![A Streaming Algorithm for Online Estimation of …downloads.hindawi.com/journals/jat/2017/4018409.pdftime input pattern consisting of𝐿samples of traffic data 𝑉𝑚,𝑛=[V𝑚,𝑛,V𝑚,𝑛−1,...,V𝑚,𝑛−𝐿+1]from](https://img.pdfslide.us/doc/110x75/5f28f309d6f8436453121e86/a-streaming-algorithm-for-online-estimation-of-time-input-pattern-consisting-ofsamples.jpg)