Embed Size (px)
DESCRIPTION
designing of Sliding mode control (SMC) in power systemadvantages and applications
Citation preview

Presented by

AgendaBackgroundDefinitionsSMC Design methodologyClassificationShortcomings Chattering & Its remedies Reaching phase & Its eliminationAdvantagesApplicationsConclusion

Background(SMC) theory was founded & advanced in the
former Soviet Union as a variable structure control (VSC)system in 1950.
SMC theory first appeared outside Russia in the mid 1970s when a book by Itkis (1976) and a survey paper by Utkin (1977) were published in English
The SMC “reachability” condition is based on the Russian mathematician, Lyapunov, and his theory of stability of nonlinear systems.

DefinitionsState Space – An n-dimensional space whose
coordinate axes consist of the x1 axes,x2 axis,…,xn
axes.State trajectory- A graph of x(t) verses t
through a state space.State variables – The state variables of a system
consist of a minimum set of parameters that completely summarize the system’s status.
Disturbance – Completely or partially unknown system inputs which cannot be manipulated by the system designer.

DefinitionsSliding Surface – A line or hyperplane in state-
space which is designed to accommodate a sliding motion.
Sliding Mode – The behavior of a dynamical system while confined to the sliding surface.
Sliding mode equation: σ = cx +˙x=0 Reaching phase – The initial phase of the
closed loop behaviour of the state variables as they are being driven towards the sliding surface.

SMC Design Methodology Three Basic StepsDesign a sliding manifold or sliding surface in
state space.Design a controller to reach the sliding surface
in finite time.Design a control law to confine the desired
state variables to the sliding manifold.

DesignThe control input in the second order system
˙˙x + a2˙x + a1x = u ...(1.1)
u = -Msign(s), s = cx+ ˙x where a1 ,a2 ,M & c are constants
may take two values, M &-M & undergoes discontinuities on the straight line s=0 n the state plane(˙x,x) shown next.

Sigma lineIn the
neighbourhood of segment mn on the
switching line s=0, the trajectories run in opposite direction which leads to the apperance of a sliding mode along this line.

Classification of SMCModes of SMC
Sliding mode control can be classified into the following modes:
(a)Continuous time Sliding mode(b)Discrete time Sliding mode(c)Sampled Data Sliding Mode
Classification by Methods :(a) Conventional Sliding Surface with or without model
σ= Sx ..................................(2.1)(b) Dynamic Sliding Surface with or without model
σ= BT x+ z .................................(2.2)˙z =−BT Ax − BT ua
with initial condition z(0) =−BT x(0)
Shortcomings Most important one is• Chattering Various others are• Because of reaching phase• Bounds of uncertainty.• Requires full state vector.
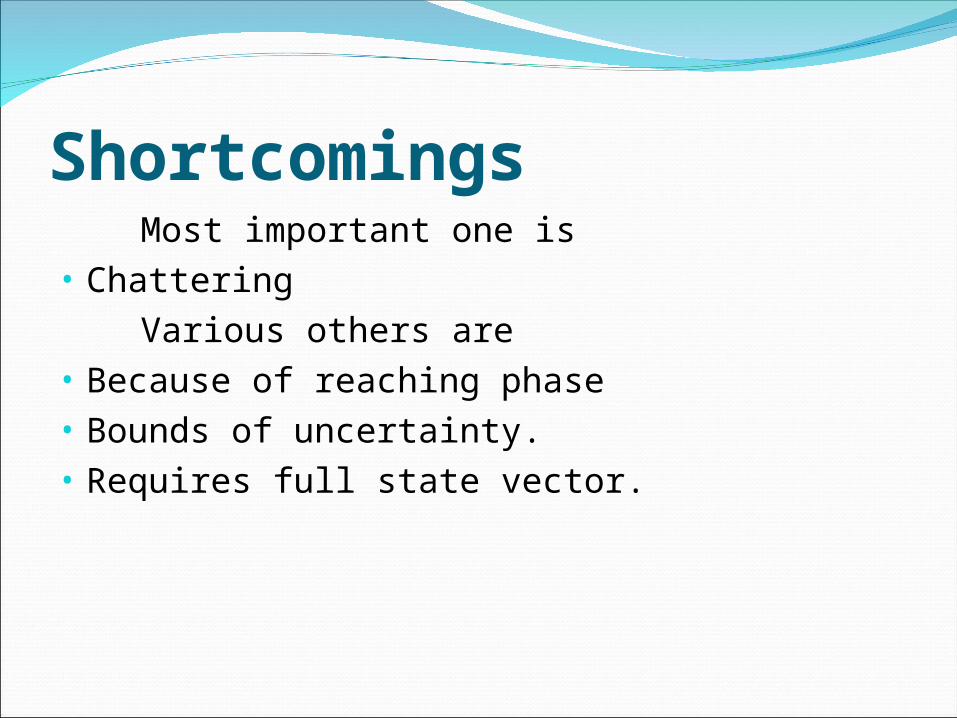
ChatteringChattering: Chattering is finite frequency,
finite amplitude oscillations about the sliding surface.
Reasons:Neglecting fast dynamics in ideal modelUtilization of digital controllers with finite sampling rate

ChatteringIt causes:Low accuracy.High heat electrical losses in electrical power circuits.High wear of moving Mechanical parts

Remediesi)Using Boundary Layer Control
ii) Observer-Based Sliding Mode Control
iii) Disturbance Compensation
iv) Actuator Bandwidth Constraint
v) SMC with Frequency Shaping

Reaching phaseReaching phase: When the system state is pushed toward the
switching surfaces During this periodThe tracking error cannot be controlled
directlyThe system response is sensitive to
parameter uncertainties and noise

EliminationBy replacing the static sliding domain
equations in the classical case with dynamic ones.
By formulating a modified sliding domain equation that exponentially decays to the original one.
by a series of rotations and translations sequentially applied to the sliding surface.

Advantages Its robustness against a large class of
disturbances or model uncertainties.The need for a reduced amount of
information in comparison to classical control techniques.
The possibility of stabilizing some nonlinear systems which are not stabilizable by continuous state feedback laws.

Applications Sliding modes in fuzzy and neural network
systemsSMC applications in power electronics: DC-DC power conversion AC-DC power conversionSMC implementation in switching convertersSliding modes in motion control systemsSMC for automobile applicantion.Motion control of underwater objects.Control of robots.

ConclusionTraditional SMC.
High frequency switching controller.Simple controller design.High quality control.
Disturbance SMC Driven by SMC ObserverContinuous controller.More complex.Very high quality control.
All SMC designs provided high quality of control without disturbance waveform modeling.
References:Books referred: Variable Structure Systems from Principles to
Implementation -edited by Asif Sabanovic, Leonid M.Fridman and Sarah Spurgeon.
Sliding mode in control and optimization. -by V.I UtkinSliding mode control engineering : -edited by Wilfrid
Perruquetti, Ecole Central de Lille, Jean Pierre Barbot.
“Sliding Modes and Their Applications in Variable Structure Systems “ By V.I. Utkin .
Websitesi) www.google .comii)www.amaderforum.com

QUERIES
THANK YOU HAPPY DIWALI