Embed Size (px)
Citation preview

Multi-Sensor Change-Point Detection Schemes
Multi-Sensor Change-Point Detection Schemes
Tiansong Wang, Michael Baron
The University of Texas at Dallas
Mar 12, 2014
1 / 25

Multi-Sensor Change-Point Detection Schemes
1 Change-point Detection with Multiple Sensors
2 Change-point Detection Based on Bonferroni AlgorithmThe Boundaries for Mean DelayThe Approximation for Mean Delay
3 Change-point Detection Based on Holm-Bonferroni StepwiseAlgorithm
The Approximation for Mean Delay
4 Acknowledgments
2 / 25

Multi-Sensor Change-Point Detection Schemes
Change-point Detection with Multiple Sensors
Multi-sensor Change Detection
In a multi-sensor system, there are d sensors. Let (x(j)k )1≤k≤n
be a sequence of observed independent random variables with
density f (x(j)k |θ
(j)) from the j th sensor. Before the change
time νj , the density parameter θ(j) is equal to θ(j)0 . After the
change, the parameter is equal to θ(j)1 , j = 1, ..., d .
Goals: to detect the first change-point of the system,ν = min νj , with a fixed rate of false alarms α; discover whichchannels experienced a change; control the rate of falsealarms, mean detection delay, probability of misdetection andwrong classification.
3 / 25

Multi-Sensor Change-Point Detection Schemes
Change-point Detection with Multiple Sensors
CUSUM Stopping Rule
Let the stopping rule for a multi-sensor system be
T = minj=1...d
(Tj)
Tj is the CUSUM stopping rule for the j th sensor.
Tj = min{n : W
(j)n ≥ hj
}W
(j)n = S
(j)n −min0≤i≤n S
(j)i is CUSUM, where S
(j)n is the sum
of log likelihood ratios for the j th sensor.
hj is the threshold for the j th sensor, which can be roughlyestimated by the rate of false alarms αj ,
hj ≈ − logαj
4 / 25

Multi-Sensor Change-Point Detection Schemes
Change-point Detection with Multiple Sensors
Three Types Errors
Define a decision variable δj for the j th sensor, j = 1, ..., d
δj =
{1, if claim a change is detected in sensor j0, if claim there doesn’t exist a change in sensor j
Type I error in the kth sensor occurs if
{T < min νj} ∩ {δk = 1}
This is a false alarm in the kth sensor before anychange-points occur.
5 / 25

Multi-Sensor Change-Point Detection Schemes
Change-point Detection with Multiple Sensors
Three Types Errors
Type II error in the kth sensor occurs if
{T ≥ min νj} ∩ {δk = 0} ∩ {νk ≤ T}
This is not a false alarm, but a change in the kth sensor ismissed at time T .
Type III error in the kth sensor occurs if
{T ≥ min νj} ∩ {δk = 1} ∩ {νk > T}
There exist changes in multi-sensor system and we stopped,but for a wrong reason. The kth sensor raised a false alarm.
6 / 25

Multi-Sensor Change-Point Detection Schemes
Change-point Detection with Multiple Sensors
Examples
Smoke detectors
Border patrols monitoring traffic across the border
Cyber security, analysis of textual streams
Quality and process control with multidimensionalmeasurements
Etc.
7 / 25

Multi-Sensor Change-Point Detection Schemes
Change-point Detection Based on Bonferroni Algorithm
Change Detection Based on Bonferroni Algorithm
In a d-sensor system, the Bonferroni procedure controls therate of false alarms at α. Let αj be the probability of falsealarms for the j th sensor, where
∑αj = α. Then we get the
corresponding thresholds h1, ..., hd for each sensor.
The stopping rule for multi-sensor system is
T = min
n :⋃
j=1...d
(W
(j)n ≥ hj
)where W
(j)n is the CUSUM value for the j th sensor and
hj ≈ − logαj .
8 / 25

Multi-Sensor Change-Point Detection Schemes
Change-point Detection Based on Bonferroni Algorithm
The Boundaries for Mean Delay
The Boundary for Mean Delay for Normal case
Assume that before the change, sensor j follows f (x |θ(j)0 ) =
Norm(θ(j)0 , σ2); after the change, it follows f (x |θ(j)1 ) =
Norm(θ(j)1 , σ2).
— Firstly, we find the upper boundary of Mean Delay (MD)
MD ≤+∞∑k=0
[P(T1 > k)]d
= min
(hjKj
)+
+∞∑hj/Kj+1
{exp
{−1
2σ2(θ
(j)1 )2 −
M2k
2σ2+ Mkθ
(j)1
}}kd
= c1 · log d ++∞∑
hj/Kj+1
exp {c2 · k − c3 · k−1 + c4}
9 / 25

Multi-Sensor Change-Point Detection Schemes
Change-point Detection Based on Bonferroni Algorithm
The Boundaries for Mean Delay
The Boundary for Mean Delay for Normal case
where Kj is Kullback information number; Mk =hj+kψ(θ
(j)1 )−kψ(θ
(j)0 )
k(θ(j)1 −θ(j)0 )
;
ci , i = 1, 2, 3, 4 are constant coefficients.
— Secondly, assume that
Z(j)i = log
f (x |θ(j)1 )
f (x |θ(j)0 )
follow≡ Norm(θz , σ2z )
We find that the lower boundary for Mean Delay is
MD ≈+∞∑t=0
(P(Tj) > t)d
≥ c5 − c6θz
· e
c5σ
(c5 − 1)θz√
2π · log d
where c5 and c6 are constant coefficients.10 / 25

Multi-Sensor Change-Point Detection Schemes
Change-point Detection Based on Bonferroni Algorithm
The Boundaries for Mean Delay
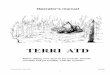
Graph of the Upper Boundary for Mean Delay
0 20 40 60 80 10068
70
72
74
76
78
80
82
84
86
88
d:# of channels
Mea
n De
lay
The Upper Bound for MD
Example: Normal(0,1) changes to Normal(0.5,1);α = 0.01
11 / 25

Multi-Sensor Change-Point Detection Schemes
Change-point Detection Based on Bonferroni Algorithm
The Boundaries for Mean Delay
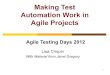
Graph of the Lower Boundary for Mean Delay
0 20 40 60 80 1000
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
d: # of sensors
Mean
Dela
yThe Lower Bound for MD
This agrees with the theoretical results.
Conclusion: a larger number of sensors does not necessarilyimply higher sensitivity, if we control the rate of false alarms.Eventually, the mean delay increases logarithmically.
12 / 25

Multi-Sensor Change-Point Detection Schemes
Change-point Detection Based on Bonferroni Algorithm
The Approximation for Mean Delay
The Approximation for Mean Delay
By Wald’s approximation, average run length function for thej th sensor is
ARL(θ(j)) =1
Eθ(j)(z(j)k )
(hj +
e−ω(j)0 hj
ω(j)0
− 1
ω(j)0
)
where ω(j)0 is a root of Eθ(j)(e
−ω(j)0 z
(j)k ) = 1.
Mean delay can be calculated, as hj goes to infinity,
MDj = ARL(θ(j)1 ) = 1
Eθ(j)1
(z(j)k )
(hj + e
−ω(j)0
hj
ω(j)0
− 1
ω(j)0
)≈ hj
Kj
where Kj = Eθ(j)1
(z(j)k ) is called Kullback information number.
13 / 25

Multi-Sensor Change-Point Detection Schemes
Change-point Detection Based on Bonferroni Algorithm
The Approximation for Mean Delay
Graph of CUSUM Procedure
14 / 25

Multi-Sensor Change-Point Detection Schemes
Change-point Detection Based on Bonferroni Algorithm
The Approximation for Mean Delay
Mean Delay of Multi-sensor System
Based on the proof of the upper boundary for mean delay, weprove that
Theorem 1
Assume that νj = 0, (j = 1, ..., d) and hj →∞ (equivalent toαj → 0), mean delay for a multi-sensor system based on Bonferronialgorithm is
MD ≈ minj=1...d
(hjKj
)
15 / 25

Multi-Sensor Change-Point Detection Schemes
Change-point Detection Based on Bonferroni Algorithm
The Approximation for Mean Delay
The Proof of Theorem 1
Firstly, we study the first and the second sensors of multi-sensorsystem.
Assume that
W1: the CUSUM process of the first sensoraaaaaaaaaaaaaW2: the CUSUM process of the second sensoraaaaaaaaaaaK1: the Kullback information number of the first sensoraaK2: the Kullback information number of the second sensorh1: the threshold of the first sensoraaaaaaaaaaaaaaaaaaah2: the threshold of the second sensoraaaaaaaaaaaaaaaaa
16 / 25

Multi-Sensor Change-Point Detection Schemes
Change-point Detection Based on Bonferroni Algorithm
The Approximation for Mean Delay
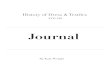
Graph of CUSUM Procedure for Two Sensors
Line W2/W1: the path of points (W1, W2);Line K2/K1: the straight line with the slope K2
K1;
Line h2/h1: the straight line with the slope h2h1
17 / 25

Multi-Sensor Change-Point Detection Schemes
Change-point Detection Based on Bonferroni Algorithm
The Approximation for Mean Delay
Line:W2/W1 goes up along with the Line:K2/K1. So we canstudy Line:K2/K1 instead of Line:W2/W1.
For this example, the slope of Line:h2/h1 is smaller than ofLine:K2/K1, that is,
h2h1
<K2
K1⇒ h2
K2<
h1K1
We see that W2 procedure passes through its threshold first.So we obtain that the mean delay of two sensors
MD{1,2} ≈h2K2≈ min
{h2K2,h1K1
}
18 / 25

Multi-Sensor Change-Point Detection Schemes
Change-point Detection Based on Bonferroni Algorithm
The Approximation for Mean Delay
Secondly, we study the second sensor and the third sensor ofmulti-sensor system. Similarly, we can prove that the mean delayof this two sensors
MD{2,3} ≈ min
{h2K2,h3K3
}Then the mean delay of this three sensors is
MD{1,2,3} ≈ min
{h1K1,h2K2,h3K3
}Thirdly, we repeat the above step to study the other sensors. Sowe can prove the mean delay for the multi-sensor system is
MD ≈ min
(hjKj
)19 / 25

Multi-Sensor Change-Point Detection Schemes
Change-point Detection Based on Holm-Bonferroni Stepwise Algorithm
Holm-Bonferroni Stepwise Algorithm (improvement ofBonferroni)
In a d-sensor system, at any time, order the CUSUMprocesses,
W[1]t ≤W
[2]t ≤ ... ≤W
[d ]t
and the corresponding thresholds,
h1 ≤ h2 ≤ ... ≤ hd
where hj ≈ − log(αj ), which is smaller (tighter) thanBonferroni’s threshold, − log(αd ).
Stopping rule is
T = min
t :⋃
1≤j≤d
(W
[j]t ≥ hj
)20 / 25

Multi-Sensor Change-Point Detection Schemes
Change-point Detection Based on Holm-Bonferroni Stepwise Algorithm
Stopping Boundaries for the Stepwise Algorithm
-
6
��
��
��
��
��
��
��
��
��
��
��
��
�
0W (1)
n
W (2)n
h2
h1
h1 h2
�������������������������������������������������������������
Figure: Continue-samplingregion and stopping boundariesfor the stepwise algorithm forchange-point detectionwith d = 2 channels.
21 / 25

Multi-Sensor Change-Point Detection Schemes
Change-point Detection Based on Holm-Bonferroni Stepwise Algorithm
Decision Boundaries for the Stepwise Algorithm
-
6Change in the2nd channel
Change inboth channels
Change in the1st channel
Change in the1st channel
Change in the2nd channel
����
��1
��������
�����
0
W(1)T
W(2)T
h2
h1
h1 h2 22 / 25

Multi-Sensor Change-Point Detection Schemes
Change-point Detection Based on Holm-Bonferroni Stepwise Algorithm
The Approximation for Mean Delay
The Approximation Mean Delay
Suppose J = set of channels with change-points ⊆ {1, ..., d}For j ∈ J, E (W
[j]t ) ≥ tK (θ
[j]1 , θ
[j]0 ) > 0
For j /∈ J, E (W[j]t ) ≈ 0 because K (θ
[j]0 , θ
[j]1 ) < 0
For large t, we expect W(j)t >W
(k)t for ∀j ∈ J and ∀k /∈ J, then
we obtain
W[1]t ≤ ... ≤W
[d−|J|]t ≤W
[d−|J|+1]t ≤ ... ≤W
[d ]t
Order Kj = K (θ(j)1 , θ
(j)0 ) for j ∈ J
Let K[j]:J be the j th smallest Kullback information number in set J;among thresholds hj = log(j)− log(α), take |J| highesthd−|J|+1, ..., hd .
23 / 25

Multi-Sensor Change-Point Detection Schemes
Change-point Detection Based on Holm-Bonferroni Stepwise Algorithm
The Approximation for Mean Delay
Theorem 2
MD ≈ minj=1,...,|J|
hd−|J|+j
K[j]:J
[Proof]For the case d = 2,Case I: if J = {1}, then E (Wt) ≈ (tK1, 0),
MD ≈ h2K1
= minj=1
hd−|J|+1
K[j]:J
Case II: if J = {2}, then E (Wt) ≈ (0, tK2),
MD ≈ h2K2
= minj=2
hd−|J|+1
K[j]:J
Case III: if J = {1, 2}, then E (Wt) ≈ (tK1, tK2),
MD ≈ minj=1,2
hd−|J|+1
K[j]:J24 / 25

Multi-Sensor Change-Point Detection Schemes
Acknowledgments
Acknowledgments
Research is based upon work supported by the National ScienceFoundation under Grant No. 1322353.
Thank you!
25 / 25