Embed Size (px)
Citation preview
University of Hamburg
MIN Faculty
Department of Informatics
SLAM
SLAMSurvey: Simultaneous Localization and Mapping
Martin Poppinga
University of HamburgFaculty of Mathematics, Informatics and Natural SciencesDepartment of Informatics
Technical Aspects of Multimodal Systems
23. November 2015
Martin Poppinga 1
University of Hamburg
MIN Faculty
Department of Informatics
SLAM
Outline
1. Motivation
2. History
3. Basics
4. Implementations
5. Conclusion
Martin Poppinga 2
University of Hamburg
MIN Faculty
Department of Informatics
Motivation SLAM
Outline
1. Motivation
2. History
3. Basics
4. Implementations
5. Conclusion
Martin Poppinga 3
University of Hamburg
MIN Faculty
Department of Informatics
Motivation SLAM
Mobile Robotics
I (Partly) autonomous SystemsI Many applications
I SAR (Search and Rescue)I Exploration (Areal, Underwater, Space)I Service
I ChallengesI MappingI Localization
Martin Poppinga 4
University of Hamburg
MIN Faculty
Department of Informatics
Motivation SLAM
SLAM
I ChallengeI Map → LocalizationI Localization → MapI Chicken-egg problem
I SLAM brings this togetherI Different approaches
I FilteringI Sensors
Martin Poppinga 5
University of Hamburg
MIN Faculty
Department of Informatics
History SLAM
Outline
1. Motivation
2. History
3. Basics
4. Implementations
5. Conclusion
Martin Poppinga 6
University of Hamburg
MIN Faculty
Department of Informatics
History SLAM
History
I First stepsI In mid 80sI Mapping and localizationI Limited in computation power
I BreakthroughI In mid 90sI Convergence of errorsI Mapping and localization togetherI Demonstration on real systems
I Wide interest in 2000s
Martin Poppinga 7
University of Hamburg
MIN Faculty
Department of Informatics
Basics SLAM
Outline
1. Motivation
2. History
3. Basics
4. Implementations
5. Conclusion
Martin Poppinga 8
University of Hamburg
MIN Faculty
Department of Informatics
Basics SLAM
Definition
I Existing informationI robots Controls / odometry
I UT = {u1, u2, u3, ...uT}I Observations
I ZT = {z1, z2, z3, ...zT}I Needed information
I Map (with its features)I m
I Path of the robotI XT = {x0, x1, x2, ...xT}
Martin Poppinga 9
University of Hamburg
MIN Faculty
Department of Informatics
Basics SLAM
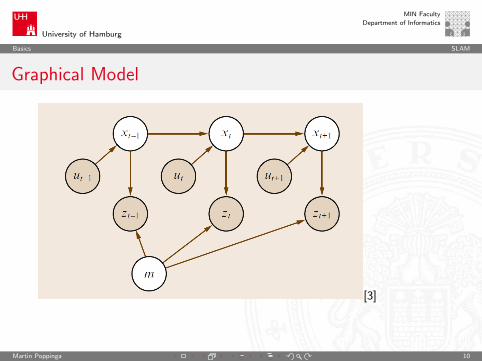
Graphical Model
[3]
Martin Poppinga 10
University of Hamburg
MIN Faculty
Department of Informatics
Basics SLAM
Probabilistic SLAM
I World is not perfect!I Full SLAM
I p(XT ,m|ZT ,UT )
I Online SLAMI p(xt ,m|ZT ,UT )
I This has to be estimated
I Different problems different estimators
I Choosing one based on the problem
Martin Poppinga 11
University of Hamburg
MIN Faculty
Department of Informatics
Basics SLAM
Different Problems
I Static vs dynamic
I Volumetric vs feature based
I Topologic vs metric
I Known vs unknown correspondence
I Large vs small uncertainty
I Active vs passive
I Single- vs multiagent
I Any time and any space
I ⇒ Lots of different approaches
Martin Poppinga 12
University of Hamburg
MIN Faculty
Department of Informatics
Basics SLAM
Different Problems
I Static vs dynamic
I Volumetric vs feature based
I Topologic vs metric
I Known vs unknown correspondence
I Large vs small uncertainty
I Active vs passive
I Single- vs multiagent
I Any time and any space
I ⇒ Lots of different approaches
Martin Poppinga 12
University of Hamburg
MIN Faculty
Department of Informatics
Basics SLAM
Different Problems
I Static vs dynamic
I Volumetric vs feature based
I Topologic vs metric
I Known vs unknown correspondence
I Large vs small uncertainty
I Active vs passive
I Single- vs multiagent
I Any time and any space
I ⇒ Lots of different approaches
Martin Poppinga 12
University of Hamburg
MIN Faculty
Department of Informatics
Basics SLAM
Different Problems
I Static vs dynamic
I Volumetric vs feature based
I Topologic vs metric
I Known vs unknown correspondence
I Large vs small uncertainty
I Active vs passive
I Single- vs multiagent
I Any time and any space
I ⇒ Lots of different approaches
Martin Poppinga 12
University of Hamburg
MIN Faculty
Department of Informatics
Basics SLAM
Different Problems
I Static vs dynamic
I Volumetric vs feature based
I Topologic vs metric
I Known vs unknown correspondence
I Large vs small uncertainty
I Active vs passive
I Single- vs multiagent
I Any time and any space
I ⇒ Lots of different approaches
Martin Poppinga 12
University of Hamburg
MIN Faculty
Department of Informatics
Basics SLAM
Different Problems
I Static vs dynamic
I Volumetric vs feature based
I Topologic vs metric
I Known vs unknown correspondence
I Large vs small uncertainty
I Active vs passive
I Single- vs multiagent
I Any time and any space
I ⇒ Lots of different approaches
Martin Poppinga 12
University of Hamburg
MIN Faculty
Department of Informatics
Basics SLAM
Different Problems
I Static vs dynamic
I Volumetric vs feature based
I Topologic vs metric
I Known vs unknown correspondence
I Large vs small uncertainty
I Active vs passive
I Single- vs multiagent
I Any time and any space
I ⇒ Lots of different approaches
Martin Poppinga 12
University of Hamburg
MIN Faculty
Department of Informatics
Basics SLAM
Different Problems
I Static vs dynamic
I Volumetric vs feature based
I Topologic vs metric
I Known vs unknown correspondence
I Large vs small uncertainty
I Active vs passive
I Single- vs multiagent
I Any time and any space
I ⇒ Lots of different approaches
Martin Poppinga 12
University of Hamburg
MIN Faculty
Department of Informatics
Basics SLAM
Different Problems
I Static vs dynamic
I Volumetric vs feature based
I Topologic vs metric
I Known vs unknown correspondence
I Large vs small uncertainty
I Active vs passive
I Single- vs multiagent
I Any time and any space
I ⇒ Lots of different approaches
Martin Poppinga 12
University of Hamburg
MIN Faculty
Department of Informatics
Basics SLAM
Sensing
I RangeI Laser Range sensorsI SonarI TactileI ...
I VisualI CameraI 3D Camera
I OtherI Wi-fiI SoundI ...
Martin Poppinga 13
University of Hamburg
MIN Faculty
Department of Informatics
Basics SLAM
Algorithm
I Handling the errorsI LocationI Landmark sensoring
I Features in m
I Measurement model
I Motion model
I Three main filter types
I Will be partly presented in IR lecture
Martin Poppinga 14
University of Hamburg
MIN Faculty
Department of Informatics
Basics SLAM
Filters
I Kalman FilterI The original technique in SLAMI Reduction of errorsI Mathematical model
I Particle FilterI Sequential Monte CarloI Particle for possible locations
I Graph Based
Martin Poppinga 15
University of Hamburg
MIN Faculty
Department of Informatics
Implementations SLAM
Outline
1. Motivation
2. History
3. Basics
4. Implementations
5. Conclusion
Martin Poppinga 16
University of Hamburg
MIN Faculty
Department of Informatics
Implementations SLAM
EKF SLAM
I First variants of SLAM
I Kalman-filter based
I Standard kalman filter
I Provisional landmark list
Martin Poppinga 17
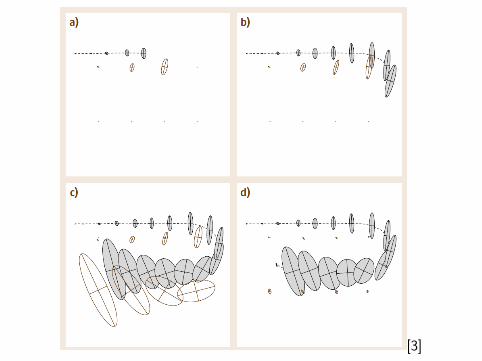
[3]
University of Hamburg
MIN Faculty
Department of Informatics
Implementations SLAM
FastSLAM
I Particle Filter
I Each particle one Position
I Rao-Blackwellization
I Independent features
I No revising of path on the fly
I Performance
I Widely used
Martin Poppinga 19
University of Hamburg
MIN Faculty
Department of Informatics
Implementations SLAM
GraphSLAM
I Builds graphI MovementI Observations
I Flexible edges
Martin Poppinga 20
University of Hamburg
MIN Faculty
Department of Informatics
Implementations SLAM
Which to Use?
I DependsI EKF SLAM
I Quadratic with landmarksI Big maps problematic (submaps)
I GraphSLAMI Elegant solutionI Full SLAM / offline
I FastSLAMI Data associationI Efficient
Martin Poppinga 21
University of Hamburg
MIN Faculty
Department of Informatics
Implementations SLAM
DARPA
I US military research
I Self driving cars in desert
I GPS not precise enough
I Stanley, winner grand challenge 2005
Martin Poppinga 22
University of Hamburg
MIN Faculty
Department of Informatics
Implementations SLAM
Project Tango
I Project by Google
I Phablet with special hardware
I Devkit available
I Targeted to consumer market
Martin Poppinga 23
University of Hamburg
MIN Faculty
Department of Informatics
Conclusion SLAM
Outline
1. Motivation
2. History
3. Basics
4. Implementations
5. Conclusion
Martin Poppinga 24
University of Hamburg
MIN Faculty
Department of Informatics
Conclusion SLAM
Current & Future Research
I Popular on conferencesI Optimization
I Computation powerI SensorsI Algorithms
I New environmentsI AirI Underwater
I Feature matching
I Loop closure
Martin Poppinga 25
University of Hamburg
MIN Faculty
Department of Informatics
Conclusion SLAM
Conclusion
I First productive systems
I Need improvement
I General purpose algorithm difficult
I Sensor quality importantI Frameworks & Tools
I ROSI OpenSLAMI Mobile Robot Programming Toolkit (MRPT)
Martin Poppinga 26
University of Hamburg
MIN Faculty
Department of Informatics
Conclusion SLAM
Thank you for your attention!
Martin Poppinga 27
University of Hamburg
MIN Faculty
Department of Informatics
Conclusion SLAM
References
[1] J Aulinas, YR Petillot, J Salvi, and X Llado.The slam problem: a survey.CCIA, 2008.
[2] H. Durrant-Whyte and T. Bailey.Simultaneous localization and mapping: part i.IEEE Robotics & Automation Magazine, 13(2):99–110, 6 2006.
[3] B Siciliano and O Khatib.Springer handbook of robotics.2008.
Martin Poppinga 28
University of Hamburg
MIN Faculty
Department of Informatics
Conclusion SLAM
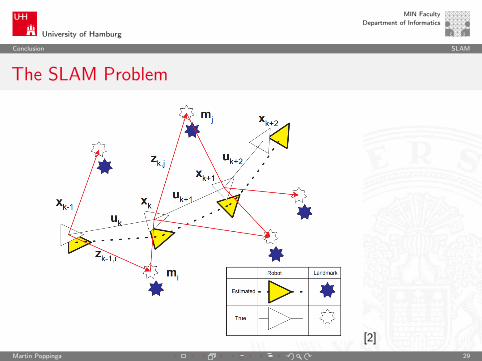
The SLAM Problem
[2]
Martin Poppinga 29















![Decoupled Localization and Sensing ... - vision.cornell.edu · with vision-based Simultaneous Localization and Mapping (SLAM) (e.g., [10,11]) or ICP-based tracking with RGBD input](https://img.pdfslide.us/doc/110x75/5f0e8cc37e708231d43fc81b/decoupled-localization-and-sensing-with-vision-based-simultaneous-localization.jpg)