Embed Size (px)
Citation preview

SIS Start Up and Run-Time Configuration
Multibeam Advisory CommitteeJuly 14, 2012
SIS 3.8.3
1Multibeam Advisory Committee – July 14, 2012

Overview
• Start up, New survey• Verify installation parameters• Set default run-time configuration• Additional settings• Saving your settings
2Multibeam Advisory Committee – July 14, 2012

Start up, New survey
• Start the sounder deck box (TRU), the workstation (HWS) and software (SIS)
• Create a new survey project• Verify that all sensor data streams are being
received
3Multibeam Advisory Committee – July 14, 2012

Start up
4Multibeam Advisory Committee – July 14, 2012
Start SIS. If the sounder deck unit has just been powered up, you may have to wait a few minutes before you can connect to the sounder. You can periodically click the “Rescan” button to attempt to establish communications with the TRU.

Start up
5Multibeam Advisory Committee – July 14, 2012
Once the deck unit (TRU) is responsive, you can select the sounder from this drop down list.

Start up
6Multibeam Advisory Committee – July 14, 2012
Create a new survey project through the following menus: View->Tear Off->New survey

Start up
7Multibeam Advisory Committee – July 14, 2012
Enter the survey project name. Many institutions have naming protocols. If you have none, the following format is recommended:
CRUISEID_INSTRUMENT_SEQUENCE_SURVEYNAME
The CRUISEID allows for easy sorting of cruises. The INSTRUMENT field helps keep data sorted by instrument. The SEQUENCE field helps keep cruise sub-projects sorted in the order that they were acquired. The SURVEYNAME helps keep track of the purpose of the survey. Here are some examples:
FK003_EM710_000_PatchTestFK003_EM710_001_TransitToAreaFK003_EM710_002_MainSurveyFK003_EM710_003_ReturnTransit

Start up
8
Choose an appropriate grid cell size.
For area surveys, choose a value that is close to the resolution of the sounder, typically 1-2% of water depth. This enables real-time data quality assessment since problems with the data will show up in the grid.
If you’re collecting data while in transit, it is recommended to choose a coarser grid cell size, otherwise it is our experience that SIS will become unstable after a few days.
Multibeam Advisory Committee – July 14, 2012

Start up
9
Go back to the “Basic Parameters” tab and click “Save new survey” then close the “New survey” tear-off window.
Multibeam Advisory Committee – July 14, 2012

Start up
10Multibeam Advisory Committee – July 14, 2012
Your new survey name will be automatically loaded and will populate the survey drop down menu.
You may wish to consider creating all the new survey projects anticipated to happen during a cruise in order to ensure/enforce any naming conventions. You can choose from any survey from the drop down box later when you arrive to a particular site so there is no harm in creating the survey project templates in advance.
Start the sonar pinging by clicking the “Not Pinging” button.

Start up
11Multibeam Advisory Committee – July 14, 2012
The sonar is now pinging. Verify that all supporting sensors are reporting.
Position
Surface sound speed
Orientation
The sonar may not necessarily be able to track the bottom yet. We will take care of that later in this procedure.

Verify Installation Parameters
• If sensors are not reporting, confirm communication protocols in SIS
• Verify sensor linear and angular offsets• Perform Built-In Self Test (BIST)
12Multibeam Advisory Committee – July 14, 2012

Start up
13Multibeam Advisory Committee – July 14, 2012
Access the sensor installation parameters through the following menus: View->Tear Off->Installation Parameters. To access some of the functionality, you’ll need to stop the sonar from pinging though there is no harm in examining the installation parameters while the sonar is pinging.

Start up
14Multibeam Advisory Committee – July 14, 2012
Verify the sensor locations against the documented positions. If your vessel has not documented this information, it is good practice to do so. This allows any operator can quickly restore the system to a known good configuration after a system crash/restore, etc. You can verify these while the system is pinging. If you need to change them, the system must not be pinging.

Start up
15Multibeam Advisory Committee – July 14, 2012Multibeam Advisory Committee – July 14, 2012
Verify the sensor angular offsets against the documented offsets. If your vessel has not documented this information, it is good practice to do so. This allows any operator can quickly restore the system to a known good configuration after a system crash/restore, etc. You can verify these while the system is pinging. If you need to change them, the system must not be pinging.

Start up
16Multibeam Advisory Committee – July 14, 2012
Run the system Built-In Self Tests (BIST). Some tests can be done dockside, this allows for hardware replacement in case of failure. Dockside noise test results should be disregarded as these are often very pessimistic due to the noisy environment typical of ports.
Noise tests can be done on site at survey speed to get a better feeling for the noise levels. Having noise measurements under these conditions allows for long-term monitoring of the ship’s acoustic noise environment. The same can be said of the impedance measurements.

Start up
17Multibeam Advisory Committee – July 14, 2012
Save the BIST output once the tests are complete.

Start up
18Multibeam Advisory Committee – July 14, 2012
When saving the BIST output, choose the standard directory used by SIS. This allows other operators to quickly find these files. Follow your institution’s file naming convention, establish one if it doesn’t exist. A good file naming convention allows for ease of analysis of long term trends in system performance, for example, changes in transducer impedance or ship noise levels.

Set Default Run-time Configuration
• Get the sounder pinging• Configure sounder run-time parameters
19Multibeam Advisory Committee – July 14, 2012

Start up
20Multibeam Advisory Committee – July 14, 2012
To help the sonar track the bottom, access the sonar’s run-time parameters through the following menus: View->Tear Off->Runtime parameters.
Start the sounder pinging by clicking the “Not Pinging” button.
If any of the warning lamps are red, the sounder may not be able to ping.

Start up
21Multibeam Advisory Committee – July 14, 2012
You can inform the sonar of the expected depth (force depth) and limit the depth range in order to help it track the bottom. Once it has found the bottom, it is recommended make the min depth something close to the surface and make the max depth much deeper than the expected depth so as not to accidentally filter the data.
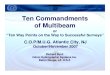
It is also helpful to configure an appropriate depth mode. This controls the pulse length, among other things. Deeper modes use longer pulse lengths to ensure a strong bottom return and to increase the likelihood of detection. AUTO mode will eventually find an appropriate depth mode but it may take longer to track the bottom. If you’re in a hurry, setting an appropriate mode manually will speed the process (see next page). Once the system has found the bottom, you should set the ping mode back to AUTO. This will allow the sounder to automatically adjust the mode depending on water depth. If the system is continually having trouble tracking the seafloor while surveying, you might find it helpful to force an appropriate depth mode.

Recommended Depth Modes
Mode EM710 EM302 EM122
Very Shallow 0 - 100 Not used Not used
Shallow 100-200 0-140 0-450
Medium 200-300 140-750 450-1000
Deep 300-500 750-3300 1000-2600
Very Deep 500-1000 3300-5000 2600+
Extra Deep 1000+ 5000+ Not used

Start up
23Multibeam Advisory Committee – July 14, 2012
You can limit the sounding sector of interest with the angle and coverage fields. The “Max. Coverage” values will vary with sounder model. Safe default settings that won’t clip your data are listed below (these do not indicate potential achievable coverage, they’re just safely bigger than coverage so that we never accidentally clip data):EM710: 3000 m is a safe defaultEM302: 9000 m is a safe defaultEM122: 30000 m is a safe default
Setting the “Angular Coverage Mode” to AUTO will allow the sounder to adjust the angular sector in response to what it can reasonably track, e.g. it will reduce the sector if it finds that it cannot track at large angles, this allows for an increased ping rate.
You can force the sounder to attempt to track over a larger sector by setting this into MANUAL mode. Your ping rate will drop and you will not gain additional data if the system cannot detect the bottom at the outer edge of the swath.
Choose “HIDENS EQDIST” for beam spacing mode to collect the maximum number of soundings across the swath.

Start up
Multibeam Advisory Committee – July 14, 2012
Turn “Pitch stabilization” on.
Turn “Yaw stabilization” on with “REL. MEAN HEADING” Mode.
If you are synchronizing the sounder with other acoustic instrumentation, be sure to click the “External Trigger” checkbox. Otherwise, make sure it is unchecked since the sounder will not ping until it receives an external transmit trigger.

Start up
25Multibeam Advisory Committee – July 14, 2012
The sound speed at the transducer is used for beamforming and beam steering. It is a very critical measurement. If you have a surface velocimeter, then you should always choose SENSOR as the source of sound speed at the transducer. This is the optimal method of compensating for surface sound speed variations.
If you do not have such a sensor (or if it is malfunctioning), you can compute the sound speed from a thermosalinograph and then choose “MANUAL” and enter the value in the “Sound Speed” field. If you don’t have access to a thermosalinograph, you can choose “PROFILE” as the source. This will lookup the transducer sound speed from the currently loaded sound speed profile. These last two modes are suboptimal: the manual method requires continual manual updating, the profile method is only good if the profile is up-to-date. You should strive to have a working surface velocimeter along with a spare.
Load a sound speed profile by clicking this button to launch a file browser.

Start up
26Multibeam Advisory Committee – July 14, 2012
Choose the most recent sound speed profile. The sound speed profile is not terribly important if you’re just testing the sounder to make sure everything is working. If you’re about to start a survey, then you should have just measured a sound speed profile and you should choose that file for upload.

Start up
27Multibeam Advisory Committee – July 14, 2012
Once you have chosen a profile, the filename field will turn yellow to indicate that you have made a change that has not been applied yet. Apply the sounds speed profile by clicking the “Use Sound Speed Profile” button.

Start up
28Multibeam Advisory Committee – July 14, 2012
You can set various bathymetric filters. You should read the manual to understand what each of these do (too much detail to get into here). Cruise scientists may have thoughts on which filters they’d like to apply; you should provide them with the manual. The settings recommended in the manual should be safe for default values.
The “Sector Tracking” filter normalizes the seabed imagery (backscatter) in real-time in an irrecoverable manner. If backscatter is of primary interest, then this should be disabled.
The “Absorption Coefficient” controls the real-time normalization of the seabed imagery. Only choose the “CTD” option if you are uploading SVP profiles with temperature and salinity data in them (the MAC SVP Editor does this when delivering profiles over the network). If you aren’t then choosing “Salinity” is the next best method. Using the mean ocean salinity is a better practice then updating this field with the surface salinity value. This value is best left alone once entered since any changes will lead to changes in seabed imagery signal level and can create headaches in post-processing.

Start up
29Multibeam Advisory Committee – July 14, 2012
You should read the manual to decide if you should apply real-time Data Cleaning. Having “None” is the safest option.

Start up
30Multibeam Advisory Committee – July 14, 2012
If the science party will be correcting for heave residuals in post-processing then you will need to log the appropriate file type. Most deep water work does not benefit much from post-processing of heave since the artifacts are so small compared to the sounding uncertainties at great depth.

Additional Settings
• Automatic file incrementing interval
31Multibeam Advisory Committee – July 14, 2012

Start up
32Multibeam Advisory Committee – July 14, 2012
Access a menu of additional parameters through the following menus: Tools->Custom…->Set parameters.

Start up
33Multibeam Advisory Committee – July 14, 2012
You can set the line increment interval here. This sets how often the system will create a new data file. This is likely going to be a setting that will vary from scientist to scientist and thus is one of the few settings in here that you may need to change on a cruise by cruise basis. Note that you will have to restart SIS for this setting change to take effect.
There are numerous additional settings that can be modified in these menus. Familiarize yourself with them when you first begin operating the system. As your experience with the sounder system increases, you should revisit these once in a while as your understanding of what each setting does will increase with time and you will be able to make more informed decisions.

Saving Your Settings
34Multibeam Advisory Committee – July 14, 2012
• Save all of your Installation and Runtime settings for backup and for easy reload

35Multibeam Advisory Committee – July 14, 2012
Save your installation and run-time parameters by accessing the following menu: File->Export PU parameters…

36Multibeam Advisory Committee – July 14, 2012
SIS has a recommended default location for configuration files. You should use this as it will ease the task of loading pre-set parameters with different operators. You should also back these files up on another computer and take great care to make sure they are not modified.

37Multibeam Advisory Committee – July 14, 2012
Choose a filename that is sensible and easy for others to understand. Having the date in the filename is useful for keeping track of setting history. Using YYYYMMDD as the file prefix allows for easier setting management since the files will be ordered in time when sorted by name in file browser windows.
If you’re curious, you can examine the contents of the file (open in Wordpad due to line-ending confusion in Notepad). Be VERY careful not to modify it. Modifying the text file to change settings is NOT RECOMMENDED!!!

38Multibeam Advisory Committee – July 14, 2012
Add a meaningful comment when prompted. This helps with setting history management. If you had a particular reason to change the default settings, this is a good place to document it.
You can reload these system settings in the future by accessing the following menus: File->Import PU parameters. YOU WILL NEED TO RESTART SIS AFTER IMPORT.
It is good practice to spend time deciding on reasonable default settings and then saving them such that any operator can quickly bring the system to a safe default state.

Questions? Feedback? Suggestions?
• Please email us:– [email protected]
39Multibeam Advisory Committee – July 14, 2012