Embed Size (px)
Citation preview
Simultaneous Robust Design and Tolerancingof Compressor Blades
Eric Dow
Aerospace Computational Design LaboratoryDepartment of Aeronautics and Astronautics
Massachusetts Institute of Technology
GTL SeminarOctober 1, 2013
Motivation
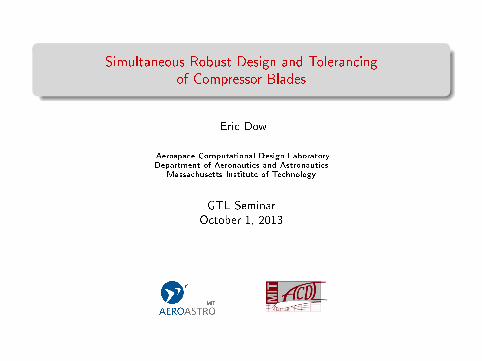
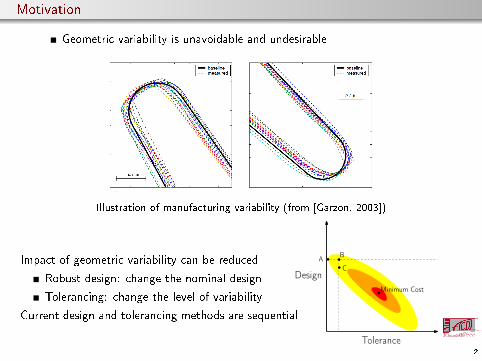
Geometric variability is unavoidable and undesirable
Illustration of manufacturing variability (from [Garzon, 2003])
Impact of geometric variability can be reduced
Robust design: change the nominal design
Tolerancing: change the level of variability
Current design and tolerancing methods are sequential
Design
Tolerance
Minimum Cost
AB
C
2
Performance Impacts of Geometric Variability
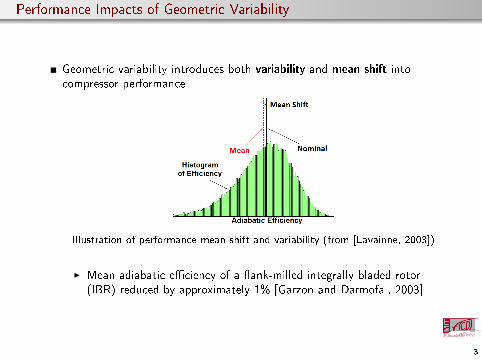
Geometric variability introduces both variability and mean shift intocompressor performance
Illustration of performance mean shift and variability (from [Lavainne, 2003])
I Mean adiabatic eciency of a ank-milled integrally bladed rotor(IBR) reduced by approximately 1% [Garzon and Darmofal, 2003]
3

Research Objectives
1 Develop a framework for simultaneous robust design and toleranceoptimization that incorporates manufacturing and operating costs
2 Develop an approach for probabilistic sensitivity analysis of performancewith respect to the level of variability
3 Demonstrate framework eectiveness for design and tolerancing ofturbomachinery compressor blades
4
The Pitfalls of Single-point Optimization
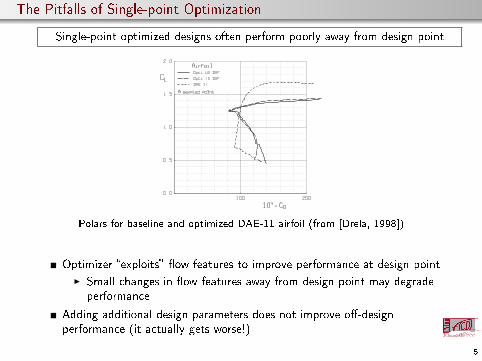
Single-point optimized designs often perform poorly away from design point
Polars for baseline and optimized DAE-11 airfoil (from [Drela, 1998])
Optimizer exploits ow features to improve performance at design point
I Small changes in ow features away from design point may degradeperformance
Adding additional design parameters does not improve o-designperformance (it actually gets worse!)
5
Robust Design Optimization
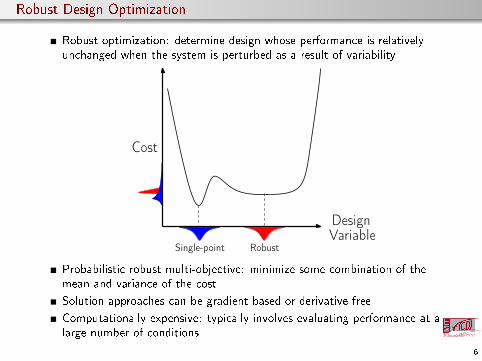
Robust optimization: determine design whose performance is relativelyunchanged when the system is perturbed as a result of variability
Design
Cost
Single-point RobustVariable
Probabilistic robust multi-objective: minimize some combination of themean and variance of the cost
Solution approaches can be gradient-based or derivative-free
Computationally expensive: typically involves evaluating performance at alarge number of conditions
6
Modelling Variability: Random Fields
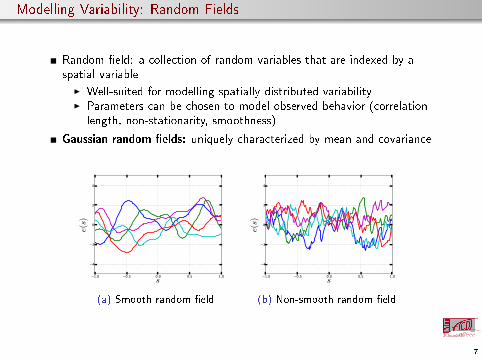
Random eld: a collection of random variables that are indexed by aspatial variable
I Well-suited for modelling spatially distributed variabilityI Parameters can be chosen to model observed behavior (correlation
length, non-stationarity, smoothness)
Gaussian random elds: uniquely characterized by mean and covariance
−1.0 −0.5 0.0 0.5 1.0s
−4
−2
0
2
4
e(s)
(a) Smooth random eld
−1.0 −0.5 0.0 0.5 1.0s
−4
−2
0
2
4
e(s)
(b) Non-smooth random eld
7
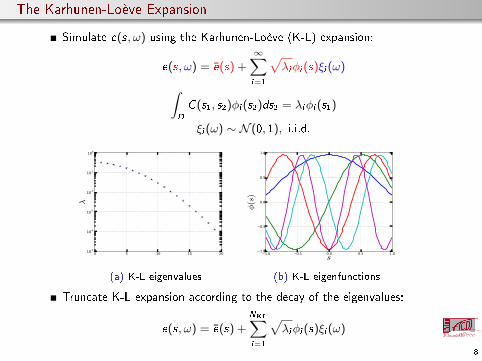
The Karhunen-Loève Expansion
Simulate e(s, ω) using the Karhunen-Loève (K-L) expansion:
e(s, ω) = e(s) +∞∑i=1
√λiφi (s)ξi (ω)∫
D
C(s1, s2)φi (s2)ds2 = λiφi (s1)
ξi (ω) ∼ N (0, 1), i.i.d.
0 5 10 15 2010-5
10-4
10-3
10-2
10-1
100
λ
(a) K-L eigenvalues
−1.0 −0.5 0.0 0.5 1.0s
−1.0
−0.5
0.0
0.5
1.0
φ(s
)
(b) K-L eigenfunctions
Truncate K-L expansion according to the decay of the eigenvalues:
e(s, ω) = e(s) +
NKL∑i=1
√λiφi (s)ξi (ω)
8
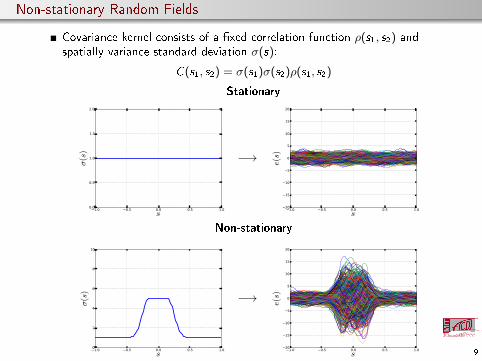
Non-stationary Random Fields
Covariance kernel consists of a xed correlation function ρ(s1, s2) andspatially variance standard deviation σ(s):
C(s1, s2) = σ(s1)σ(s2)ρ(s1, s2)
Stationary
−1.0 −0.5 0.0 0.5 1.0s
0.0
0.5
1.0
1.5
2.0
σ(s
) −→
−1.0 −0.5 0.0 0.5 1.0s
−20
−15
−10
−5
0
5
10
15
20
e(s)
Non-stationary
−1.0 −0.5 0.0 0.5 1.0s
0
2
4
6
8
10
σ(s
) −→
−1.0 −0.5 0.0 0.5 1.0s
−20
−15
−10
−5
0
5
10
15
20
e(s)
9
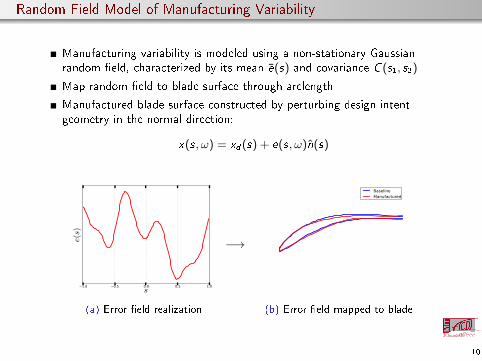
Random Field Model of Manufacturing Variability
Manufacturing variability is modeled using a non-stationary Gaussianrandom eld, characterized by its mean e(s) and covariance C(s1, s2)
Map random eld to blade surface through arclength
Manufactured blade surface constructed by perturbing design intentgeometry in the normal direction:
x(s, ω) = xd (s) + e(s, ω)n(s)
−1.0 −0.5 0.0 0.5 1.0s
e(s)
(a) Error eld realization
−→
BaselineManufactured
(b) Error eld mapped to blade
10
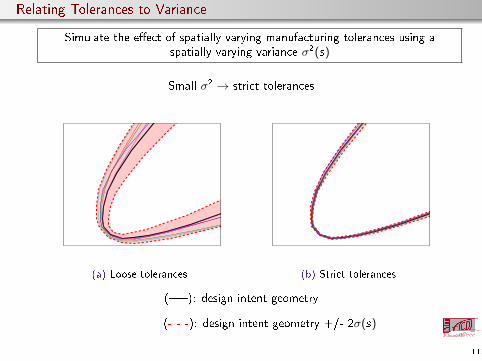
Relating Tolerances to Variance
Simulate the eect of spatially varying manufacturing tolerances using aspatially varying variance σ2(s)
Small σ2 → strict tolerances
(a) Loose tolerances (b) Strict tolerances
(): design intent geometry
(- - -): design intent geometry +/- 2σ(s)
11
Performance and Manufacturing Costs
Choose blade design and manufacturing tolerances that minimize overall cost
Cperf(d,σ): economic value of aerodynamic performance per blade
Proportional to the moments of the performance of the system:
Cperf(d,σ) = −kmE[η(ω; d,σ)] + kv√Var[η(ω; d,σ)]
Cman(σ): manufacturing cost per blade
Monotonically decreasing function of allowed geometric variability
Cman(σ) = kman
∫Ωs
1
σ(s)ds
12
Optimization Statement
Optimal design (d∗) and manufacturing tolerances (σ∗) determined byminimizing sum of manufacturing and operating costs
Mean pressure ratio Π is constrained above minimum allowable value Π
(d∗,σ∗) = argmin Cperf(d,σ) + Cman(σ)
s.t. E[Π(d,σ, ω)] ≥ Π
Gradient-based optimization: use sensitivity information to choose searchdirections
I Sequential Quadratic Programming (SQP)
13
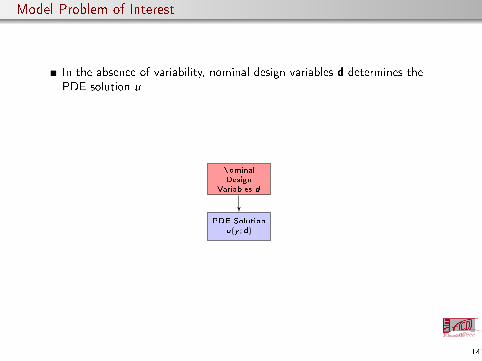
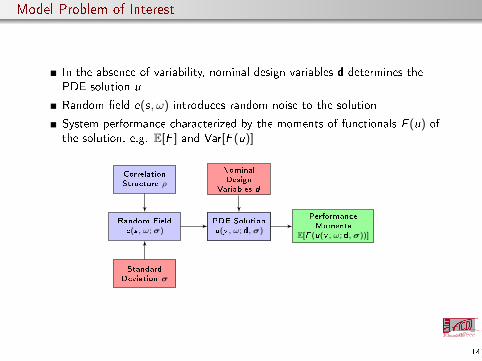
Model Problem of Interest
In the absence of variability, nominal design variables d determines thePDE solution u
Random eld e(s, ω) introduces random noise to the solution
System performance characterized by the moments of functionals F (u) ofthe solution, e.g. E[F ] and Var[F (u)]
Random Field
e(s, ω; σ)
Standard
Deviation σ
Correlation
Structure ρ
PDE Solution
u(y ; d)
PDE Solution
u(y, ω; d,σ)
Nominal
Design
Variables d
Performance
Moments
E[F (u(y, ω; d,σ))]
14
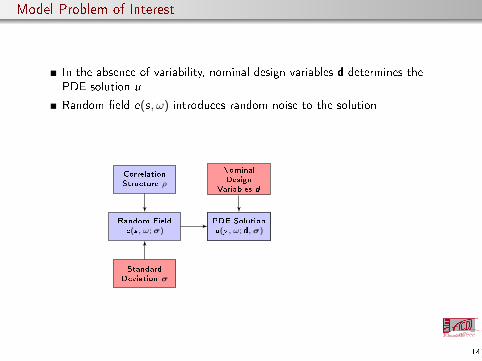
Model Problem of Interest
In the absence of variability, nominal design variables d determines thePDE solution u
Random eld e(s, ω) introduces random noise to the solution
System performance characterized by the moments of functionals F (u) ofthe solution, e.g. E[F ] and Var[F (u)]
Random Field
e(s, ω; σ)
Standard
Deviation σ
Correlation
Structure ρ
PDE Solution
u(y ; d)PDE Solution
u(y, ω; d,σ)
Nominal
Design
Variables d
Performance
Moments
E[F (u(y, ω; d,σ))]
14
Model Problem of Interest
In the absence of variability, nominal design variables d determines thePDE solution u
Random eld e(s, ω) introduces random noise to the solution
System performance characterized by the moments of functionals F (u) ofthe solution, e.g. E[F ] and Var[F (u)]
Random Field
e(s, ω; σ)
Standard
Deviation σ
Correlation
Structure ρ
PDE Solution
u(y ; d)PDE Solution
u(y, ω; d,σ)
Nominal
Design
Variables d
Performance
Moments
E[F (u(y, ω; d,σ))]
14
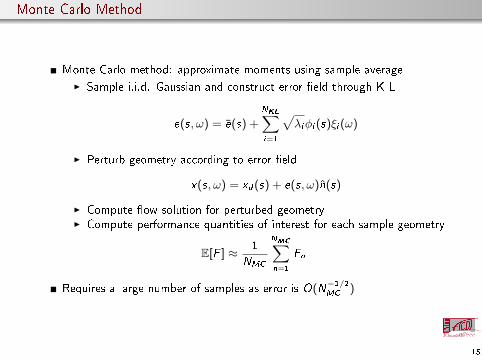
Monte Carlo Method
Monte Carlo method: approximate moments using sample average
I Sample i.i.d. Gaussian and construct error eld through K-L
e(s, ω) = e(s) +
NKL∑i=1
√λiφi (s)ξi (ω)
I Perturb geometry according to error eld
x(s, ω) = xd (s) + e(s, ω)n(s)
I Compute ow solution for perturbed geometryI Compute performance quantities of interest for each sample geometry
E[F ] ≈ 1
NMC
NMC∑n=1
Fn
Requires a large number of samples as error is O(N−1/2MC )
15
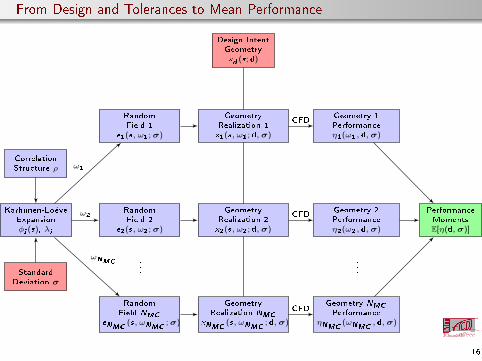
From Design and Tolerances to Mean Performance
Karhunen-Loève
Expansion
φi (s), λi
Standard
Deviation σ
Correlation
Structure ρ
Random
Field 2
e2(s, ω2; σ)
Random
Field 1
e1(s, ω1; σ)
.
.
.
Random
Field NMCeNMC
(s, ωNMC; σ)
Geometry
Realization NMCxNMC
(s, ωNMC; d,σ)
Design Intent
Geometry
xd
(s; d)
Geometry
Realization 2
x2(s, ω2; d,σ)
Geometry
Realization 1
x1(s, ω1; d,σ)
Geometry 1
Performance
η1(ω1, d,σ)
Geometry 2
Performance
η2(ω2, d,σ)
Geometry NMCPerformance
ηNMC(ωNMC
, d,σ)
.
.
.
Performance
Moments
E[η(d,σ)]
ω1
ω2
ωNMC
CFD
CFD
CFD
16
Sensitivity Analysis Overview
Gradient based optimization: need to compute
I∂E[F ]
∂di(Sensitivity of mean performance to nominal design)
I∂E[F ]
∂σi
(Sensitivity of mean performance to tolerances)
Pathwise sensitivity: exchange dierentiation and integration
∂E[F ]
∂di= E
[∂F
∂di
]∂E[F ]
∂σi
= E[∂F
∂σi
]= E
[∂F
∂e
∂e
∂σi
]
Shape sensitivities ∂F/∂di and ∂F/∂e can be computed with
I Adjoint methodI Direct sensitivity methodI Finite dierence/complex step method
Sample path sensitivity ∂e/∂σi derived from the K-L expansion
17
Pathwise Sensitivity Analysis
Objective function is some moment of a performance quantity of interest
J = E[F (e(σi , ξ))] =
∫F (e(σi , ξ)) pΞ(ξ) dξ
Exchange dierentiation and integration:
∂J
∂σi
=
∫∂F
∂e
∂e
∂σi
pΞ(ξ) dξ = E[∂F
∂e
∂e
∂σi
]Key idea: x random numbers and perturb sample realizations
Pros: well-suited to handle spatially distributed uncertainty
Cons: requires continuous F (excludes failure probability sensitivities)
18
Monte Carlo and Pathwise Sensitivities
Recall Monte Carlo approximation:
E[F ] ≈ 1
NMC
NMC∑n=1
Fn
Pathwise sensitivity analysis: exchange dierentiation and summation
∂E[F ]
∂di≈ 1
NMC
NMC∑n=1
∂Fn∂di
∂E[F ]
∂σi
≈ 1
NMC
NMC∑n=1
∂Fn∂σi
∂Fn/∂σi is computed for xed realization, i.e. xed ξ in the K-L expansion
e(s, ω;σ) = e(s) +
NKL∑i=1
√λiφi (s)ξi (ω)
19
Sample Path Sensitivity
For each realization of the random eld, compute sensitivity of randomeld e with respect to each σj
Karhunen-Loève eigenvalues/eigenvectors are dierentiable functions of σ:
e(s, ω;σ) = e(s) +
NKL∑i=1
√λiφi (s)ξi (ω)
∂e(s, ω;σ)
∂σj
=
NKL∑i=1
(1
2√λiφi∂λi∂σj
+√λi∂φi∂σj
)ξi (ω)
∂λi∂σj
= φTi∂C
∂σj
φi
∂φi∂σj
= −(C− λi I )+ ∂C
∂σj
φi
These derivatives exist if the eigenvalues have algebraic multiplicity of one
20
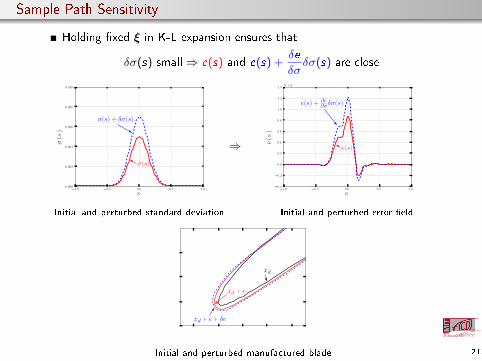
Sample Path Sensitivity
Holding xed ξ in K-L expansion ensures that
δσ(s) small⇒ e(s) and e(s) +δe
δσδσ(s) are close
1.0 0.5 0.0 0.5 1.0
s0.000
0.002
0.004
0.006
0.008
0.010
σ(s
)
σ(s)
σ(s) + δσ(s)
Initial and perturbed standard deviation
⇒
1.0 0.5 0.0 0.5 1.0
s0.4
0.2
0.0
0.2
0.4
0.6
0.8
1.0
1.2
1.4
e(s
)
1e 2
e(s)
e(s) + ∂e∂σδσ(s)
Initial and perturbed error eld
xd
xd + e
xd + e + δe
Initial and perturbed manufactured blade 21
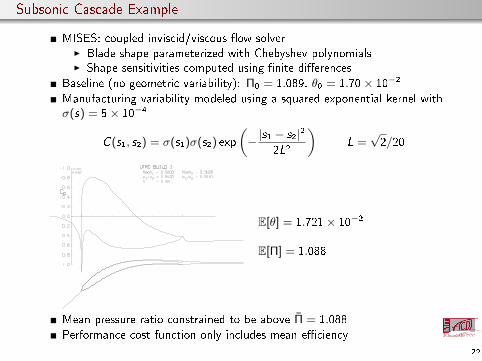
Subsonic Cascade Example
MISES: coupled inviscid/viscous ow solverI Blade shape parameterized with Chebyshev polynomialsI Shape sensitivities computed using nite dierences
Baseline (no geometric variability): Π0 = 1.089, θ0 = 1.70× 10−2
Manufacturing variability modeled using a squared exponential kernel withσ(s) = 5× 10−4
C(s1, s2) = σ(s1)σ(s2) exp
(−|s1 − s2|2
2L2
)L =√2/20
E[θ] = 1.721× 10−2
E[Π] = 1.088
Mean pressure ratio constrained to be above Π = 1.088
Performance cost function only includes mean eciency
22
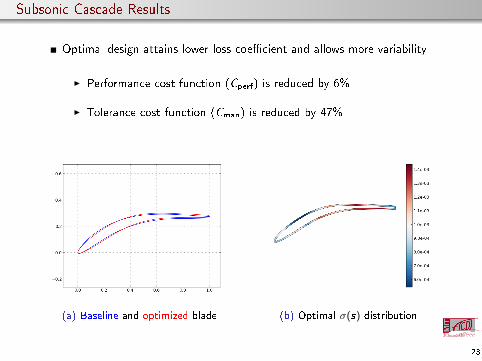
Subsonic Cascade Results
Optimal design attains lower loss coecient and allows more variability
I Performance cost function (Cperf) is reduced by 6%
I Tolerance cost function (Cman) is reduced by 47%
(a) Baseline and optimized blade (b) Optimal σ(s) distribution
23
Summary and Future Work
New framework for simultaneous robust design and tolerancing
I Manufacturing and operating costs incorporated into optimizationI Create a feedback loop between designers and manufacturers
Novel probabilistic sensitivity analysis of performance to level of variability
Optimal blade performs better and is cheaper to manufacture
Future Work
More accurate/ecient shape sensitivities: direct sensitivity method
Transonic compressor optimization
Investigate solution quality
24
Questions?
25
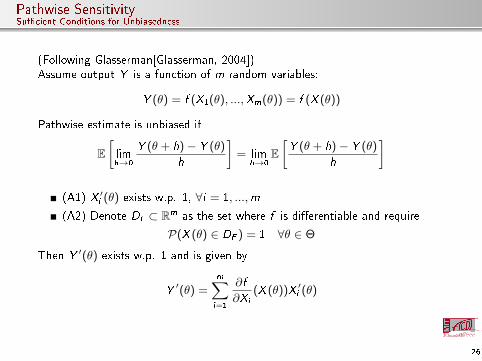
Pathwise SensitivitySucient Conditions for Unbiasedness
(Following Glasserman[Glasserman, 2004])Assume output Y is a function of m random variables:
Y (θ) = f (X1(θ), ...,Xm(θ)) = f (X (θ))
Pathwise estimate is unbiased if
E[limh→0
Y (θ + h)− Y (θ)
h
]= lim
h→0E[Y (θ + h)− Y (θ)
h
]
(A1) X ′i (θ) exists w.p. 1, ∀i = 1, ...,m
(A2) Denote Df ⊂ Rm as the set where f is dierentiable and require
P(X (θ) ∈ DF ) = 1 ∀θ ∈ Θ
Then Y ′(θ) exists w.p. 1 and is given by
Y′(θ) =
m∑i=1
∂f
∂Xi
(X (θ))X ′i (θ)
26
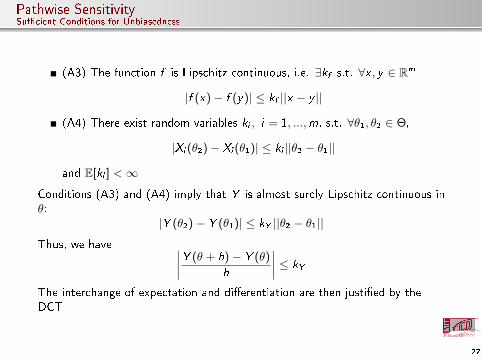
Pathwise SensitivitySucient Conditions for Unbiasedness
(A3) The function f is Lipschitz continuous, i.e. ∃kf s.t. ∀x , y ∈ Rm
|f (x)− f (y)| ≤ kf ||x − y ||
(A4) There exist random variables ki , i = 1, ...,m, s.t. ∀θ1, θ2 ∈ Θ,
|Xi (θ2)− Xi (θ1)| ≤ ki ||θ2 − θ1||
and E[ki ] <∞
Conditions (A3) and (A4) imply that Y is almost surely Lipschitz continuous inθ:
|Y (θ2)− Y (θ1)| ≤ kY ||θ2 − θ1||
Thus, we have ∣∣∣∣Y (θ + h)− Y (θ)
h
∣∣∣∣ ≤ kY
The interchange of expectation and dierentiation are then justied by theDCT
27
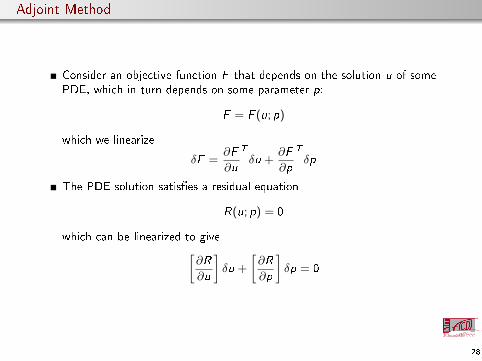
Adjoint Method
Consider an objective function F that depends on the solution u of somePDE, which in turn depends on some parameter p:
F = F (u; p)
which we linearize
δF =∂F
∂u
T
δu +∂F
∂p
T
δp
The PDE solution satises a residual equation
R(u; p) = 0
which can be linearized to give[∂R
∂u
]δu +
[∂R
∂p
]δp = 0
28
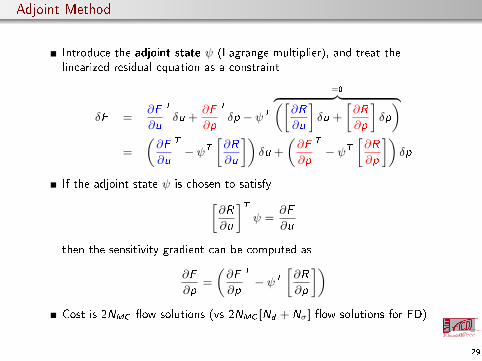
Adjoint Method
Introduce the adjoint state ψ (Lagrange multiplier), and treat thelinearized residual equation as a constraint
δF =∂F
∂u
T
δu +∂F
∂p
T
δp − ψT
=0︷ ︸︸ ︷([∂R
∂u
]δu +
[∂R
∂p
]δp
)=
(∂F
∂u
T
− ψT
[∂R
∂u
])δu +
(∂F
∂p
T
− ψT
[∂R
∂p
])δp
If the adjoint state ψ is chosen to satisfy[∂R
∂u
]Tψ =
∂F
∂u
then the sensitivity gradient can be computed as
∂F
∂p=
(∂F
∂p
T
− ψT
[∂R
∂p
])Cost is 2NMC ow solutions (vs 2NMC [Nd + Nσ] ow solutions for FD)
29
Eigenvalue Level Repulsion: von Neumann-Wigner Theorem
The codimension of the set of positive denite matrices with repeated
eigenvalues is greater than one
The space of all SPD n × n matrices forms a linear space of dimensionN = n(n + 1)/2.
Two ways to count this: sum of diagonal and elements above diagonal,or...
I n dimensions corresponding to the eigenvaluesI (n − 1) dimensions corresponding to rst eigenvector subject to||φ1|| = 1
I (n − 2) dimensions corresponding to second eigenvector subject to||φ2|| = 1 and φT1 φ2 = 0
I ...I Single dimension corresponding to the second to last eigenvectorI Final eigenvector is uniquely determined by all others
n +n∑i=1
(n − i) = n + n(n − 1)/2 = n(n + 1)/2 = N
30
Eigenvalue Level Repulsion: von Neumann-Wigner Theorem
Now consider the space of all SPD n × n matrices with exactly twoeigenvalues that are equal
The space of real SPD n × n matrices with more than two equaleigenalues is certainly no larger than this space
Similar counting approach
I n − 1 dimensions corresponding to the eigenvaluesI (n − 1) dimensions corresponding to rst simple eigenvector subject
to ||φ1|| = 1I (n − 2) dimensions corresponding to second simple eigenvector
subject to ||φ2|| = 1 and φT1 φ2 = 0I ...I Two dimensions corresponding to the last simple eigenvectorI Eigenspace corresponding to equal eigenvalues is uniquely determined
(n − 1) +n−2∑i=1
(n − i) = N − 2
Starting from a random matrix and moving in a random direction will almost
surely result in simple eigenvalues
31
Antithetic Variates
Consider estimating the mean M = E[F (ξ)], ξ = (ξ1, ..., ξNKL) with twosamples:
M =F (ξ1) + F (ξ2)
2=
F1 + F2
2
with estimator variance
Var(M) =Var(F1) + Var(F2) + 2Cov(F1,F2)
4
If F (ξ) is monotone, choose
ξ1 = −ξ2
then Cov(F1,F2) < 0 and variance is reduced
Quantities of interest and their sensitivities are nearly linear when level ofuncertainty is small
32
References I
[Drela, 1998] Drela, M. (1998).
Frontiers of Computational Fluid Dynamics 1998, chapter 19, Pros and cons of airfoiloptimization, pages 363380.
World Scientic Publishing.
[Garzon, 2003] Garzon, V. E. (2003).
Probabilistic Aerothermal Design of Compressor Airfoils.
PhD dissertation, Massachusetts Institute of Technology, Department of Aeronautics andAstronautics.
[Garzon and Darmofal, 2003] Garzon, V. E. and Darmofal, D. (2003).
Impact of geometric variability on axial compressor performance.
Journal of Turbomachinery, 125(4):692703.
[Glasserman, 2004] Glasserman, P. (2004).
Monte Carlo Methods in Financial Engineering, chapter 7, Estimating Sensitivities, pages386401.
Springer Verlag, New York.
[Lavainne, 2003] Lavainne, J. (2003).
Sensitivity of a Compressor Repeating-Stage to Geometry Variation.
Master's dissertation, Massachusetts Institute of Technology, Department of Aeronauticsand Astronautics.
33