Embed Size (px)
Citation preview

Ecological Modelling, 52 (1990) 181-205 181 Elsevier Science Publishers B.V., Amsterdam
Simulation modeling system for aquatic bodies
A.A. Voinov and A.A. Akhremenkov
Computer Centre, USSR Academy of Sciences, Vavilova 40, GSP1, Moscow 117967 (U.S.S.R.)
(Accepted 12 September 1989)
ABSTRACT
Voinov, A.A. and Akhremenkov, A.A., 1990. Simulation modeling system for aquatic bodies. Ecol. Modelling, 52: 181-205.
Basic principles and advantages of a user-friendly interactive modeling system (SIMSAB) are discussed. The system is designed as a personal-computer interface. The model is formulated in terms of a special flow-language, which is then automatically translated to produce portable Fortran programs that can be run on any computer. Additional blocks and processes can be put into the system by a user who knows Fortran. The system is intended for construction of compartmental models and includes a special hydrodynamic block to calcu- late wind-induced currents and to account for the material exchange between compartments.
1. INTRODUCTION
Over the last 60 years, methods of mathematical modeling have penetrated into theoretical ecology, which not only gained new insights from mathe- matical findings but also provided quite interesting mathematical problems (Svirezhev, 1983). However, practical ecology was much more cautious with respect to mathematical methods, and only with the advent of computer methods of mathematical modeling started to gain understanding among practical biologists and even decision-makers.
At present, unfortunately, we are close to the other extreme: in biological circles, models are sometimes considered as a kind of panacea, which can solve any problem; this in turn quickly results in frustration and disregard of mathematical methods in general. Various disputes about the role and place of mathematical models in general, and theoretical models in particu- lar, arise (Loehle, 1983; Hall, 1988).
Any successful ecological research project assumes joint efforts of special- ists in very different fields. Closer interaction within such a multidisciplinary team can be achieved if mathematical methods penetrate directly into the biological medium. In this case, most discussions about the utility of models
0304-3800/90/$03.50 © 1990 - Elsevier Science Publishers B.V.

182 A.A. V O 1 N O V A N D A.A. A K H R E M E N K O V
will become superfluous, since both specialists and non-specialists in model- ing will become equal in their ability to apply mathematical methods.
By mathematical methods we mean not only statistical methods of information processing, which are already accepted by biology and find more and more wide applications as more and more powerful and conveni- ent software packages are developed (Abstat, Statgraphics, etc.). We rather mean methods of simulation modeling, as a means of representation of experimental information for formulation and verification of hypotheses about operating principles for ecosystems and their separate units. Percep- tion of methods of simulation modeling by poorly mathematized natural sciences - biology, chemistry, ecology - is very much impeded by lack of an interface which, as in the case of statistics, could provide workers ignorant of mathematics and programing a means to apply mathematical methods of analysis, allowing them to build and modify mathematical models by themselves.
In this paper we consider an example of such an interface - the Simula- tion Modeling System for Aquatic Bodies (SIMSAB). The modeling system is actually an attempt to formalize the procedure of modeling, which is still more of an art than a science.
Being most loosely linked to postulates of a certain school of mathemati- cal modeling, the modeling interface is flexible enough to cover models of different kinds. Those principles which make up the invariant part of the system are clearly identified and open to criticism.
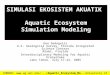
It is most natural to classify the existing systems of automatic program- ing by arranging them along some axis which lies between the computer
COMPUTER CODES
SIMSAB
ASSEMBLER C, PASCAL FORTRAN BASIC
CSMP (Brennan and Silberberg, 1968) SYSL DYNAMO (Forrester. 1961; Shaffer, 1980)
SAPFIR 0vanishev, 1986)
BGS (Hakamata et al., 1986)
SONCHES (Knijnenburg et al., 1984)
CLEANER (Park et al., 1979) MINLAKE (Riley and Stefan, 19887
GJumso modeJ (Jergensen et al., 1978) BALSECT (Leonov, 1981); BEM (Kutas and Herodek, 1983)
CONCEPTUAL MODEL
Fig. 1. Hierarchy of computer languages used in aquatic modeling.

SIMULATION MODELING SYSTEM FOR AQUATIC BODIES 183
codes at its one extreme and some narrow problem-oriented languages or realizations of concrete models at the other. An at tempt of such a classifica- tion is presented in Fig. 1. SIMSAB is placed somewhere in the middle of the axis. However, this is not quite precise, since the system possesses features of both computer- and problem-oriented languages. On the one hand it can be treated as an expansion of Fortran, because any kind of Fortran constructions are valid in SIMSAB. On the other hand, if For t ran is set aside, the present version is quite narrowly oriented on aquatic modeling, and this makes it closer to the other end of the axis.
Any attempt to simplify interaction between people and the computer results in losses in generality. And it is a very delicate problem to find the optimal balance between simplification of formulations and generality of the language. Since there is a continuous spectrum of possible solutions to this problem, and since the delicate balance is mostly a matter of the user's taste, it is only natural that more and more modeling languages and systems appear.
2. SIMSAB-STRUCTURE OF MODELS
If we look at the process of simulation modeling, we can easily distinguish four main stages: (1) construction of the conceptual model; (2) formalization of the conceptual model in mathematical terms; (3) programing and computer runs (or analytical solution if possible); (4) model analysis, calibration and verification.
The first stage is impossible without direct or indirect efforts of natural scientists. The second stage needs the knowledge of both natural scientists and mathematicians or computer scientists, or a special background in both fields. The next two stages can be performed by mathematicians with practically no interaction with the naturalists. Finally, closing the modeling loop, we again need natural scientists to re-evaluate and reconsider the conceptual model, and perhaps the formalizations.
Setting aside the 'artistic' work concerned with conceptual constructions and formalizations, we may note that the mathematical and computer jobs are rather routine, having much in common when we go on from one model to another. The formalizations used in models of ecosystems of the same type are more or less typical, the procedures of model analysis (sensitivity, robustness, etc.) and calibration are more or less the same. This naturally leads us to the idea of some kind of unification and automatization of all these procedures. Any success in this field may not only simplify the most boring stages of modeling concerned with programming and debugging, but can also significantly secure us from technical mistakes in models, leaving

184 A.A. V O I N O V A N D A.A. A K H R E M E N K O V
our hands free to look for conceptual errors. Besides, if the resulting system proves to be sufficiently user-friendly, it can stimulate non-mathematicians for their own applications of modeling techniques.
In order to imagine such a modeling system let us consider again how a simulation model is built.
2.1 Links and interactions
Suppose we have a conceptual model. This means that, knowing the purposes of the model, we have bounded our ecosystem in space and time, we have identified the variables which are the ecosystem components of interest provided with experimental time series, and we have defined the links between these ecosystem components. Besides, we have determined the interactions between the ecosystem and its environment by identifying the forcing functions which specify the time-variable effects that are indepen- dent of the ecosystem. These are the functions that affect the ecosystem with no feedback from it. Our conceptual model also includes the spatial repre- sentation of the ecosystem, which means that we have decided whether the ecosystem is spatially homo- or heterogeneous, and we have chosen how to represent its spatial distribution. And, finally, we assume at least a qualita- tive description of the interactions between the variables. All this is actually what we call a conceptual model.
The stage of formalization of the conceptual model assumes that various qualitative processes are quantitatively interpreted in mathematical terms. All the variety of interactions in an ecosystem can be classed into three levels of complexity. Firstly it is the functions, which define some simple interactions explicitly determined by some internal or external factors in the ecosystem. An example can be presented by the temperature limitation function, which determines the effect of temperature upon the rate of some processes, or the so-called trophic functions, which define the uptake rate depending upon the predator and prey concentrations.
Secondly it is the functionals, which may depend upon several processes or flows in the ecosystem and define several flows at a time. An example of such a functional is the formalization,of the Liebig's principle of limiting factors. In the model, this functional is to determine the synchronized flows of limiting nutrients into an organism, depending upon the potentially available flows of separate nutrients.
And finally we can distinguish processes, meaning large-scale transforma- tions in the water-body, such as the formation of wind-induced currents (the hydro-dynamics), or the material exchange between the water-body and the watershed or among different parts of the water-body (mixing).

SIMULATION MODELING SYSTEM FOR AQUATIC BODIES 1 8 5
In terms of this classification, any interaction between ecosystem compo- nents can be presented as a superposition of some functions and functionals while various spatial or temporal irregularities may be described as some kind of processes. It is most common to present an ecosystem model in terms of equations, which right-hand sides actually contain the necessary functions (see for instance Jorgensen et al., 1978; Di Toro and Connolly, 1980; Di Toro and Matysik, 1980, and many others). Such presentations seem to be quite natural and self-explanatory, and the SIMSAB flow-lan- guage actually follows the lines of this kind of formalism. Instead of a detailed formalization when all functions should be further described, as is usually done, and all parameters specified, SIMSAB provides a means of qualitative description in terms of functions, functionals and processes, so that it is enough for the user just to know the qualitative effect of various terms, and he may not bother about the mathematical representation of the appropriate functions. The necessary functions will be substituted automati- cally, and the needed parameters will be searched in a special parameter library and inserted into the appropriate function.
In fact, there is a number of functions which prove to be quite adequate and transfer from one model to another. The light-limitation functions of Steele (1962) and Di Toro (Di Toro et al., 1971) are one such example. Another example is the variety of trophic functions, starting from the Volterra function (1927), the functions from the theory of enzyme kinetics and their analogies from population dynamics presented by variations of the Monod and Michael is -Menten functions. Likewise, Jorgensen (1980) pre- sents a list of temperature-limitation functions encountered in models.
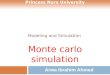
Practically, it turns out that we can make a list of functions, which would cover most of the interactions used in models. Besides, consider a gener- alized function of the form:
R s ( P ) = MU pst/(Ksst+ psi)
where MU is the maximal uptake rate, Ks is the half-saturation coefficient, s t
defines the steepness of the curve, and P is the concentrat ion of the substrate or the number of preys. This function can cover almost all of the trophic functions if different parameter values are inserted (Fig. 2). A generalized function can be suggested to present practically all the variety of temperature-limitation functions (Fig. 3):
FT2(T) = [ FT0[I--T/TOPTI"' if T < TOPT FTM [(T-T°I'r)/(TMAx-T°oT)I'', otherwise,
where FT0 is the temperature factor at 0 ° C, FTM the temperature factor at maximal temperature, TOPT the optimal temperature ( °C) , TMAX is the

1 8 6 A . A . V O I N O V A N D A . A . A K H R E M E N K O V
I
~ r ~ h i p ~ d t r , . q ; ~ n r ~ r ~
O, 10 t ...........................
o.~[ .i-iii O . O g O T . ; ~ " ~ "
_,_-- y °-F I ! l I
7 Zl g ~ I0 I K ~t
O, I000 ~, 0000 $, 0~00 O, IOQQ 3.0000 3.5000 O, t O 0 0 3 , 0 0 0 0 '~, Q4X30 O, IO00 3,000~ 1. OOOU
Fig. 2. Variations of a generalized trophic function.
maximal temperature ( o C), and s t is the slope of the curve. Other universal functions can be also suggested. As a result we find out that a limited number of functions can represent practically all the necessary ecological interactions. The same can be said about functionals and processes. Natu-
e - r a ~ h i e ~ dir,~la,J p rogrz*
1 .00
O. 7'3O"
O.GOI"
0 ,2~1
!!!!!!!!i fTo 0 , 0 6 0 0 O. 0500 O, OCoO0 O, UraOO
_/- ,
\ /
/ / ~, \
z J . , - ~ / . / ' '- . , . ,
• ¢. ,< S -- " "
• / c .-- _- - , .
~-5-'-; . . . . . . . \ . . . . . . . ( I 1 I " ~
16 24 ~32 40
d 0 . ~ 2 5 . C ~ O 0 ~ . 5 o o o gO. O00O dO.O(~O0 5,5000 ~o. 0 ~ 4 O , O 0 O O t ,OOOO 60, gUOO 20. OOOO 1,500O
Fig. 3. Variations of a generalized function of temperature limitation.
ES~ t o o u i t o r c h o o s e o a r m ~ e t e r s a n d o r e s s E n t e r

S I M U L A T I O N M O D E L I N G S Y S T E M F O R A Q U A T I C B O D I E S ] 87
rally, however, to keep in pace with ecological developments the resulting system should be open for modifications and expansions.
2.2 Spatial structuring
Let us now look at the spatial representation assumed by the conceptual model. Generally speaking, spatially heterogeneous ecosystems can be mod- eled by systems of equations in partial derivatives. However, since such models need much CPU time for model runs and require extremely exten- sive experimental backup, there are only a few examples of full-scale case studies based on models of this type (e.g. Krapivin, 1980; Dejak and Pecenik, 1987).
Much more wide-spread are the so-called compartmental models, which assume that the whole water body can be split into a number of ecologically homogeneous segments (compartments) (Chen and Orlob, 1975).
Within each of the segments, ecosystem components are presented by spatially averaged variables (numbers, concentrations). It should be noted that such a structuring is quite natural for a practical worker, who usually deals with data measured on a fixed network of stations. In this case it is only natural to think that each of the stations (especially if it produces data significantly different from those observed at the adjacent ones) describes an ecologically uniform region and thus represents a certain segment of the model.
In SIMSAB the segmental presentation of spatial irregularities is as- sumed. In order to bring together the representations of different segments within the framework of a single model, ecosystem components modeled by variables in segments are to be recalculated according to the intrasegmental material exchange provided by advective flows (currents induced by wind, outflows, inflows, sedimentation, etc.) and dispersive fluxes (turbulent and molecular diffusion). All these flows can either be input into the model as forcing functions, or calculated within special hydrodynamical models, which are a part of the system.
2.3 Temporal discreteness of processes
After considering the model organization in space, let us look at its temporal organization. In SIMSAB it is assumed that a sequence of events can be distinguished on the time axis, each event standing for some process realized in the ecosystem. These processes are assumed to be realized instantly, and no processes occur in between. Then the functioning of an ecosystem can be described as follows: at, say, time t boundary segments receive a nutrient load; next, for instance, at time t + dt concentrations of

1 8 8 A.A. VOINOV AND A.A. AKHREMENKOV
various components are altered due to material transfer along trophic chains or in hydrobiochemical cycles (ecological block); then at time t + 3 dt the wind-induced currents are formed, determining the water exchange between segments (hydrodynamical block); next, at time t + 7 dt, say, the whole water body is mixed up by water exchange and diffusive fluxes between segments, correspondingly changing the concentrations of ecological compo- nents; then, at time t + 10 dt, again some nutrient load enters the water body, and so on. Note that, generally speaking, the content of each of the events is arbitrary.
2.4 General structure of S IMSAB
The resulting structure of SIMSAB is presented in Fig. 4. Within a segment, dynamics of variables are described by a system of ordinary differential equations. In order to formulate them one should specify their
I C0Mp E.
° ° ° /
eeal~;e~t
F
Fig. 4. Genera l s t ructure of SIMSAB.

S I M U L A T I O N M O D E L I N G S Y S T E M F O R A Q U A T I C B O D I E S 189
right-hand sides. This is performed in terms of a special flow language which operates with various functions and functionals contained in the SIMSAB library of functions.
The syntax details of this language can be found elsewhere (Akhremen- kov, 1988). Here we just outline the main points: - Q[X, Y] stands for the flow from variable X to Y.
QIN[X] and QOUT[X] stand for the inflow into X from outside the system and outflow from X to outside, respectively.
- Q[*, X] and Q[X, *] stand for the sums of all flows entering X and leaving X, respectively.
- $ denotes a SIMSAB library function, for instance, $FT2(T, X), $RS( X, Y), etc. #VAR: NANE.EXT is a model parameter: VAR (optional) stands for the variable name, NAME is the parameter name and EXT (optional) is an extension, which can be another variable name for parameters in binary interactions, or any other identifier.
- If a SIMSAB function returning several values is used, then these values will be assigned to the flows in curly brackets (..} in the left-hand side. As for the rest, the basic Fortran syntax rules are adopted ( 'C ' starts the
comments, entries start from the sixth position, etc.). The resulting differential equations of the model, which will be composed
by the system itself, have the form: /7
dXi/dl= E (Q[Xj, Xi]-Q[Xi, xjl)+QINIXil- QOUT[Xi] j - 1
i = 1 . . . . . n, where n is the number of variables. SIMSAB allows one to build models operating with qualitative, concep-
tual ideas about ecosystem material transformations. This means that, restricting oneself to the functions from SIMSAB library, one can describe the processes in the ecosystem as a superposition of various elementary processes, which are already mathematically formalized and programmed. Table 1 contains an overview of some of SIMSAB functions, most often used in modeling of lakes. In what follows some examples are presented to show how processes are formalized in SIMSAB.
Generally speaking, the right-hand sides can be formulated in a file as a user-written Fortran program. If you apply means of SIMSAB, then the right-hand sides are calculated as sums of flows, specifying the material transfers from one ecosystem component into another. These flows may be described either in terms of SIMSAB, using its library of functions, or as fragments of a Fortran program. In any case, SIMSAB results in a number of Fortran subroutines, calculating the right-hand sides of systems of dif- ferential equations, presenting various segments of the water body. The user

190
TABLE 1
SIMSAB library of functions (fragment)
A.A. VOINOV AND A.A. AKHREMENKOV
(1) S-shaped trophic function
$ R s Z ( X , Y ) = p.[ X n / ( k n + Xn)] Y
/~ maximal uptake rate (day 1) k half-saturation coefficient (mg/ l ) n slope
(2) Bell-shaped function
FT0 [1 - T/TOVr]"
$FT2(T, X ) = ~ if T<TOPT
t FTM [( T - To Fq )/( -~ M A X -- ro pr)]"
otherwise
FT0 temperature factor at 0 ° C FTM temperature factor at maximal
temperature TOPT optimal temperature ( o C) TMAX maximal temperature ( ° C) s t slope of the curve
(3) Van 't Hoff temperature function
$FT4(T, X ) = 2 ( T - % ) / 1 °
T O reference temperature ( ° C)
(4) Temperature function for mortality
$ F T M O R ( T , X )
= II+° Tm, o-T 2
Tmin minimal temperature Tm~ ̀ maximal temperature a, B rate coefficients
(5) Anaerobic mortality function
i oX>Oao F O 4 ( O X , X ) = + 7 ( O a n - O X ) 2
if OX < Oan
O.n threshold of anaerobic condition (rag O 2 per liter)
v rate coefficient
T < Tmi n
Tmi°< T < T,~.,
Tma x < T
RS2/Y (a) / . . 2 ......... ~.
k X
FTO
FTM
(b) FT2
1
TOPT TM/~O(
FT4 (c)
r o 7
FI"MOR (d)
1
i
Train F04
/ Tr.~, ' T
(e)
0 ~. OX

S I M U L A T I O N M O D E L I N G S Y S T E M F O R A Q U A T I C B O D I E S
TABLE 1 (continued)
191
(6) Aerobic /anaerobic function
$Fosw(ox, x )
= [ l + e x p ( - o ( o x - O , . ) ] - '
o steepness of curve Oa. aerobic /anaerobic threshold
(mg O 2 per liter)
(7) Reaeration curve
$REA(OX, T, k r ) = kr(O s --OX)
where
o~ = 14.619 96 - 0.4042 T + 0.008 42 T 2
- -0 .00009 T 3 (Wang et al., 1978)
o s 02 saturation coefficient (mg/I ) kr reaeration coefficient (day- 1)
(8) Light at tenuation function
$SHAD(X, . . . . . X k) = K s . + Ks, X I + - - .
+ Ks)(,
Ksw extinction coefficient for water Ks, extinction coefficient for i th com-
ponent (mg- 1 )
( ,=1 . . . . . k)
(9) Integral light l imitation function
SFIINT(E, K, h, Ksh )
= [2.71828/( KshH)]
× [exp(- Eo/Eopt)
- e xp ( -E /Eor , t)]
where
E o = exp( - K.hH ) Ksh extinction coefficient ( = $SHAD) Eop t optimal i l lumination
(cal cm 2 d a y - l ) H depth of the segment (m)
FOSW
0 an
(f)
OX
SHAD
FLINT
(g)
Xl
(h)
|
E opt
Ik
E
To be continued

192
TABLE 1 (continued)
A.A. VOINOV AND A.A. AKHREMENKOV
(10) Uptake function for Liebig's principle of limiting factors
S L I M I ( Y , g 1 . . . . . X k , S R I ( X 1 , Y ) . . . . .
SRk(Xk, Y) ( . . . ) =C, min{ [(SR,(X,, Y) /C1) ]
. . . . . [$Rk ( g k , Y ) / C k ]}
i = 1 ..... k, number of limiting factors
X, limiting factor (nutrient) C, stoichiometric coefficient $R i trophic function for uptake of ith
nutrient X, (11) Stoichiometric decomposition of flow Q
from Y to X 1 ..... X k
$STI(Y, X 1 ..... X k, Q)
(. . .} =QCi/ (C, + "" +Ck)
i =1 ..... k, number of recipients Ci stoichiometric coefficient
who does not know any Fortran is restricted in his model formulations by the SIMSAB library of functions, which incidentally includes all of the most widely used functions.
The formulations of the SIMSAB flow-language are automatically processed to produce a Fortran program. All the parameters are automati- cally inserted in the appropriate places. In order to do this the system makes use of a specially structured file storing the information about various parameters encountered in ecosystem modeling of water bodies. This file is the library of parameters. Table 2 presents a fragment of the SIMSAB library of parameters.
The SIMSAB-monitor brings together all the processes, which are sub- routines, including those which compute the wind-induced currents, the material exchange between segments and within a segment due to the flows between different ecological components (variables) defined by the differen- tial (difference) equations, and those subroutines which provide input of data and explanation of results. In the monitor we actually define a number of time loops which control the sequence of various events presented by the model. There is also a number of standard functions used by the monitor. These functions make up the monitor library, of which a fragment is given in Table 3.

SIMULATION MODELING SYSTEM FOR AQUATIC BODIES
T A B L E 2
SIMSAB l ibrary of parameters ( fragment)
193
# C O M M O N c o m m o n parameters KSHWAT 0.02
# P R O D U C E R S
# F phy top lank ton
1.5
STI2 0.1 2 FT0 0.05 0.2
c c 60 100 MBRESP 0.001 RESP 0.001 0.008 PHOTO 1 2.5 MB 0.01 0.8
MOR 0.0001 0.05 CN 6 10 CP 1 --
IOPT 3000 3500 K.N 0.01 5
M.UN 0.1 5 K.P 0.001 1.5 M.UP 0.5 8.4
KSH 0.01 0.1
TMAX 29 36 TOPT 21 25 TMIN 5 10
# ME emerging macrophytes AB 0,0011 -- MORRO 0,001 -
G M A M 1 - -
T M A M 26.4 -- GMIM 1 3 TMIM 8.5 13.9
MB 0.003 - MOR 0.0014 -- TOPT 21.5 26 TMAX 39 45 FT0 0.035 0.1
# # C O N S U M E R S
# z zoop lank ton MB 0.1 0.3 MBRESP 0.001 0.05 RESP 0.11 0.7 MFO4 1 - -
M O R 0.001 0.05 K.D 60 --
a t t enua t ion coefficient
steepness of t empera ture curve tempera ture factor at 0 o C stoichiometric coefficient for P coefficient of respiratory losses respirat ion coefficient photosynthe t ic 02 product ivi ty coefficient of metabol ic losses morta l i ty coefficient s toichiometr ic coefficient for N stoichiometric coefficient for P opt imal i l luminat ion hal f -sa tura t ion concent ra t ion for N uptake maximal uptake rate of ni t rogen hal f -sa tura t ion concen t ra t ion for P uptake maximal uptake rate of phosphorus a t t enua t ion coefficient maximal t empera ture of vegetat ion opt imal tempera ture of vegetat ion minimal tempera ture
autolysis coefficient mortal i ty of roots t empera ture factor for morta l i ty at max imum maximal t empera ture for mortal i ty tempera ture factor for mortal i ty at m i n i m u m minimal tempera ture for morta l i ty coefficient of metabol ic losses morta l i ty coefficient opt imal tempera ture maximal tempera ture tempera ture factor at 0 o C
coefficient of metabol ic losses coefficient of respiratory losses rate of 02 consumpt ion threshold for oxygen l imita t ion morta l i ty coefficient hal f -sa tura t ion concen t ra t ion for D uptake

194 A.A. VOINOV AND A.A. AKHREMENKOV
T A B L E 2 (cont inued)
M.UD 0.1 1.5 K.F 9 18 M.UF 0.1 1.5 LFOAEI 1 - MFOAEI 2 5 TMAX 32 37 TOPT 24 28 TMIN 1 0 13
# B ben thos K.D 10 20 M.UD 0.2 - MBRESP 0.001 - RESP 0 . 0 1 -
MOR 0 . 0 0 5 - -
M B 0.1 0.4 K.Z 1 --
M.UZ 0.1 0.5 K.F 10 20 M.UF 0.1 1 TMAX 34 - TOPT 23 25 TMIN 8 9
# # F ISH
maximal uptake rate of detr i tus ha l f -sa tura t ion concen t ra t ion for F up take maximal uptake rate of p h h y t o p l a n k t o n steepness of oxygen l imitat ion curve threshold for oxygen l imita t ion maximal tempera ture opt imal tempera ture for growth minimal t empera ture
ha l f -sa tura t ion concen t ra t ion for D up take maximal uptake rate of detr i tus coefficient of respiratory losses rate of 02 consumpt ion morta l i ty coefficient coefficient of metabol ic losses ha l f -sa tura t ion concen t ra t ion for Z up take maximal uptake rate of zoop lank ton hal f -sa tura t ion concen t ra t ion for F up take maximal uptake rate of p h y t o p l a n k t o n maximal t empera ture opt imal t empera ture for growth minimal t empera ture
# CR c o m m o n carp MBRESP 0 . 0 0 ] -
RESP 0.01 -
M B 0.3 -
K . A 0.1 0.5 M.UA 0.03 -
K . Z 1 -
M . U Z 0 . 0 l 0 . 0 5
K.B 5 -
M . U B 0.01 0.1 LFOAE1 1 -
MFOAE1 2 5 TMAX 34 37 TOPT 26 - TMIN l 0 ] 3
# S silver carp M B 0 . 3 -
M B R E S P 0.001 - RESP 0 . 0 l -
K.D 60 - M.UD 0.01 0.5 K . F 2 0 -
coefficient of respiratory losses rate of 02 consumpt ion coefficient of metabol ic losses ha l f -sa tura t ion concen t ra t ion for up take of feed maximal uptake rate of artificial feed hal f -sa tura t ion concen t ra t ion for Z up take maximal uptake rate of zoop lank ton hal f -sa tura t ion concen t ra t ion for B up take maximal uptake rate of ben thos steepness of oxygen l imita t ion curve threshold for oxygen l imita t ion maximal t empera ture opt imal t empera ture for growth minimal t empera ture
coefficient of metabol ic losses coefficient of respira tory losses rate of 02 consumpt ion hal f -sa tura t ion concen t ra t ion for D up take maximal uptake rate of detr i tus ha l f -sa tura t ion concen t ra t ion for F uptake

SIMULATION MODELING SYSTEM FOR AQUATIC BODIES
TABLE 2 (continued)
195
M.UF 0.05 0.5
LFOAE1 1 - MFOAEI 2 5 TMAX 35 -- TOPT 26 - TMIN 13 -
# N U T R I E N T S
P phosphorus KSED 0.1 0.3 OCRSED 0.3 1
:~ PEP in roots of macroophytes K.PIS 0.02 - MU.PIS 0.11 -
g¢ PS P in submerged macrophyte cells MAXCON 0.03 -
:¢ # S U S P E N D E D SOLIDS
:~ D d e t r i t u s
c c 60 100 OK 0.01 0.1 CN 6 10
c p 1 -
D E S 0.002 0.00004 MFOAN1 1 KSH 0.1 1 FT0 0.1 0.15
maximal uptake rate of phytop lankton steepness of oxygen limitation curve
threshold for oxygen limitation maximal temperature optimal temperature for growth minimal temperature
sedimentat ion rate threshold concentra t ion for sedimentat ion
half-saturation coefficient for uptake of available P maximum uptake rate of available P
maximal concentrat ion
stoichiometric coefficient for N destruction rate stoichiometric coefficient for N stoichiometric coefficient for N BOD
threshold for oxygen limitation at tenuation of light reference temperature l imitation
SIMSAB assumes that some of the monitor functions can be specially predefined by the user. The formulations of the right-hand sides is actually the special definition of those monitor functions that solve systems of ordinary differential equations ($RUNGE, $ADAMS or $EULER). Like- wise, the formation of a file containing the matrix of the depths of the water body and wind and flow scenarios according to a special pattern can be considered as the predefinition of the hydrological monitor function (SHY- DRO), which calculates the patterns of wind-induced currents and material exchange between segments.
Just as in the case of the right-hand sides, the monitor can include any of the user-prepared Fortran fragments and subroutines.
3. A S IMSAB-MODEL WITH C O M M E N T S
As an example, let us look at a simple one-segment model of an aqueous ecosystem. Let it be one of those qualitative models of phyto- and zooplank-

196
T A B L E 3
SIMSAB moni to r funct ions (fragment)
A.A. VOINOV A N D A.A. A K H R E M E N K O V
$1~AD (DATA) a rgumen t , . . . , a rgumen t - da ta input. Arguments are given values defined as DATA. Arguments may be the vectors VARaY, FORaN, FLOWi, or any other variables of the monitor , a, box model name; N, segment number .
SHVDROI file_ name - names the file with the results computed by the hydrological b lock for various wind scenarios. Call ing this funct ion we input the matr ix of flows for the next scenario.
SM_lX - recalculat ion of concent ra t ions according to pa t te rns of in t rasegmenta l exchange stored in file specified by $HYDRO
SFOR_ PLOT a rgumen t , . . . , a rgumen t - stores the a rguments for plotting. $PLOT - interact ive graphic program, which draws plots for a rguments accumula ted by
$ ~ O R PLOT, saves graphics, compares results of runs. Works only on IBM PC-compat i - bles.
$ O ~ a ' n argument[ (a l , b l ) ] , . . . , a rgument l ( a i , bi)] - on line ou tpu t of s imulat ion results to the console. Opt ional (ai, bi) defines the m i n i m u m and m a x i m u m values of cor responding arguments (default ai = 0, bi = 100). Works only on IBM PC-compat ibles .
SRUNGE a, VARaN, FORaN, i - numerical in tegrat ion of the system of differential equat ions by 4th-order R u n g e - K u t t a method, a, box model name; VARaN and FORaN, vectors of variables and forcing funct ions; i, an integer defining the n u m b e r of i tera t ions for each call of the funct ion (default: i = 1).
SAD.O~tS a, VARaN, FORAY, i - numerical in tegra t ion by Adams method. No ta t i ons same as in R U N G E .
$EULER a, VARaN, FORaN, i - numerical in tegra t ion by Euler method. No ta t ions same as in R U N G E .
ton interactions, which are well documented and analyzed in the literature (Di Toro et al., 1975; Alekseev, 1976; Matsumura and Sakawa, 1980; Arnold and Voss, 1981, etc.). Suppose that growth of phytoplankton (A) is limited by one of the nutrients: total mineral phosphorus (P) or nitrogen (N). Besides, phytoplankton is grazed by zooplankton (Z), both of which die off, becoming detritus (D). Figure 5 presents the diagram of material flows for
Fig. 5. Material flows in a simple eu t rophica t ion model.

SIMULATION MODELING SYSTEM FOR AQUATIC BODIES 197
such a model. The corresponding system of ordinary differential equations may be presented as follows:
d A / d t : F I ( T ) V(N, F, A) (CN + CP -{- CC)(] -- BA) -- AMA
d z / d t = F2(T) R(A, Z) (1 - BZ) - ZMZ dD/dt = BAFI(T) V(N, P, A) (CN + CP + CC) + AMA + BZF2(T) R(A, Z)
+ ZMZ - F3(T) DESD
dN/dt = F3(T)DESDCN/(CN + CP + CC) -- El(T) V(N, P, A)CN
dP/dt = F 3 ( T ) DESDCP/(CN Jr CP + CC) -- F I ( T ) V(N, P, A) CP
where FI(T) and F2(T) are the temperature functions of the form as shown in Fig. 3, F3(T) is the Van 't Hoff temperature function, which can be presented by the initial part of exponential growth in Fig. 3; CN, CP, CC are the stoichiometric coefficients for nitrogen, phosphorus and carbon, respec- tively; V(N, P, A) = min[R(N, A)/CN; R(P, A)/CP] describes the uptake of nutrients according to the principle of limiting factors; R(A, Z), R(N, A), R(P, A) are s-shaped trophic functions (Fig. 2); BA, BZ are the metabolism coefficients for phyto- and zooplankton; MA, MZ are the corresponding mortality coefficients; DES is the destruction rate coefficient.
Let us now formulate this system in terms of the SIMSAB flow language. The definition of flows is opened by the specification of the box model
name, the names of the variables and forcing functions and the name of the model's library of parameters, which is automatically created as a subfile of the SIMSAB parameters library containing all the parameters pertaining to the specific model. Next, go the definitions of the positive material flows between ecosystem variables within one segment. For instance, in Fig. 6 we first describe the production of algae, as a process limited by temperature,
MODEL A VAR A,Z,D,N,P; FORC T; PARAM MOD-A.PRM;
C Uptake of nutrients by phytoplankton with limitlng by N C or P: SLIM1 returns two values, two flows are deflned.
C $RS2 is a trophic function, SFT2 is a temperature £unctlon. ~@[ N,A ],Q[P,A]]zSFT2(T,A)~SLIMI(A,N,P,SRS2(N,A),$RS2(P,A))
C Uptake o1 car.bon descrxbed as an external flow @IN[A]zQ[N,A]/~A;C.N~A:C.C
C Gl'azlng of zoo- on phytoplankton limited by temperature @[A,Z]zSFT2(T,Z) ~ $RS2(A,Z)
C Metabollc losses and mortality
Q[A,D]:Q[~,A]~A:MB + A~AzMOR (][Z,D]:@[*,Z].~Z:MB + Z~Z:MOR
C Decomposl tlon of detritus into nutr.ients. $STI dlstr.lbutes C the flow o£ decomposed detritus $DES accordlng to C stolchiometry.
[Q[ D,N ],@[D,P],GOUT[D]]=$FT~(T,D)~$STI(D,N,P,C,$DES(D)) END
Fig. 6. Formulation of box model A .

198 A.A. VOINOV AND A.A. AKHREMENKOV
nitrogen and phosphorus. The flows of N and P are synchronized according to Liebig's principle. The effect of temperature is assumed to be multiplica- tive. In order to recalculate the concentrations of algae in terms of biomass we assume an additional flow of carbon from without of the system. Therefore the uptake of C is described as an external flow. The growth of zooplankton is limited by temperature and by the available phytoplankton, which is grazed according to the s-shaped trophic function. The flow to detritus is due to the methabolic losses and mortality, which are assumed to be linear functions of the total uptake by organisms and their biomass, respectively. Finally the matter cycle is closed by splitting detritus into nutrients with respect to its stoichiometric content. The decomposition rate is assumed to depend upon temperature, and the process is presented by function $DES, which is a linear function of the available detritus.
Next, other box models can be described for other segments if any. Let us note again that when using the SIMSAB library functions we do not define their parameters. All the necessary parameters are automatically selected from the parameters library, or inquired from the user during the first translation, if there is no such parameter in the base.
Formulation of the model is concluded by the definition of the monitor which specifies the sequence of modelled events. In our case (Fig. 7) we first read the initial values for the variables, then every week we input the new value of temperature which is the forcing function, and then twice a day we calculate the system of ordinary differential equations by Adams method and output the results in an interactive mode.
MONITOR MOD A; INITIAL C Input of the initlal values o£ variables :
$READ(0.5, 0.1, 2, 0.01, 0.005) VAR C Period of simulation is 60 days : DYNAMIC TENDz60; ST:0,7; C Input of temperatur.e starting from time 0 C and every 7 days :
$READ(TEMP) T ST:O,O.5; C Ever.y 12 hours (0.5 days) : C output o£ variables A & Z as ~l~aphs:
$SRAPH A(0,2), Z(0,2) C compute the system of equations by Adams method :
SADAMS A,VAR,FORC,5 END
DATA TEMP: 3, 8.5, 13, 18, 14, 17, 13, II, 20;
Fig. 7. F o r m u l a t i o n of the m o n i t o r .

SIMULATION MODELING SYSTEM FOR AQUATIC BODIES 199
®
L
?
Fig. 8. Material flows in another eutrophication model.
The data used by the monitor can be either specified in the same file or in other appropriate files called by the program. In this case, the weekly averaged temperature is specified together with the monitor.
A model thus formulated is automatically translated into Fortran. Let us now slightly alter the conceptual diagram of our model: suppose
that, instead of the aggregated variable 'phytoplankton' we take into consid- eration two algae species, the diatoms (A) and the blue-greens (BG). Figure 8 demonstrates the material flows in this model. Consider the SIMSAB formulation of this model (Fig. 9). The production of both algae species is described in a similar way, but in case of blue-greens we take into account
MODEL B VAR A,BG,Z,D,N,P; FORC T; PARAM EXAMP.PRM;
{@[ N,A ],Q[ P,A ]]:$FT2(T,A)~$LIMI(A,N,P,$RS2(N,A),$RS2(P,A)) QIN[A]zQ[N,A]/~A:C.N~#A:C.C [Q[N,BG],Q[P,BG]]:$FT2(T,BG) ~ [$RS2(N,BG),SRS2(P,BG)] QIN[BG]:Q[P,BG]/@BG;C.P~@BG:C.C QIN[BG]=@IN[BG]+$MAX(O,Q[P,BG]/~$BG:C.P*~BG:C.N - Q[N,BG]) [Q[A,Z],Q[BG,Z]]z$FT2(T,Z) ~ {$R -C,2(A,Z),$RS2(BG,Z)] Q[A,D]zQ[~,A]~A:MB + A~#AzMOR Q[BG,D]: Q[ ~,BG]~BG:MB + BG~BG:MOR Q[Z,D]:Q[~,Z]~Z:MB + Z~#Z:MOR [@[ D,N ],Q[ D,P ),QOUT[ D]] : $FTZI.(T,D)~$STI(D,N,P,C,$ DES(D))
END
MONITOR MOD B; INITIAL
SREAD(O.J4, 0.2, 0.1, 2, 0.01, 0.005) VAR DYNAMIC TEND:60; ST:O,7;
$READ(TEMP) T ST:O,O.5;
$GRAPH A(o,a), BG(O,£), Z(O,2) $EUNGE B,VAR,FORC
END DATA TEMP: 3, 8.5, 13, t8, 20, 17, 13, 11, 8;
Fig. 9. Formulation of model B.

200 A.A. VOINOV AND A.A. AKHREMENKOV
mg/1 ;'-,
0.6 / ~,
/ k 0.4 ~ , i__~.
i i ~ . ,I " ' " 0.2 . . . . . ~ ~ - - - " , __~ . , ' / - ~ _ . ~
I I I 25 ~0 day
A - - B G ....... Z ....
Fig. 10. Simulated phyto- and zoop|ankton dynan/cs.
that, due to fixation of nitrogen in molecular form, this nutrient has no limiting effect upon the species. This fact is described by the additional external flow. At the next trophic level, both algae species are consumed by
MONITOR MOD B SEG l; (Segment i ls repl-esented by model B) MOD A SEG 2; (Segment 2 is represented by model A) SEGMENT 2 MIXING A,Z,N,P,D; (These are the mixed variables) FLOW 8 MIXING N ,P ; (These varlables are input INITIAL from watershed) C input the inltial values for both segments
$READ(INIT B) VARBI $READ(INIT_A) VARA2
DYNAMIC TEND:G0; ST:I,IO; C every lO days we alter, the climatlc conditions and C the concentratlon of nutrients In Inflows
$READ(TEMP) TBI $READ(FLOW) FLOW;
ST:I,5; C every 5 days we read the new hydrodynamics scenario C previously calculated and stored in file EXAMP.RES
$HYDROI EXAMP.RES ST:I,1; C accumulate all results to draw a plot afterwards
$FOR_PLOT VARBI,VARB2,VARA3,VARA~ C calculate the concentrations in box models, usin~ C Adams metod of integratlon of dlf.equatlons
$ADAMS B,VARBI,FORCBI,20 $ADAMS A,VARA2,FORCBI,20
C recalculate the concentrations in segments, takln~ C into account the material exchange due to currents
$MIX TERMINAL C finally draw the plot for the results
SPLOT END
DATA INIT A: O.5, 0.1, 2, 0.Ol, 0.OO5; (znitzal v a l u e s ) INIT_B: 0.4, 0.2, 0.1, a, 0.01, 0.005; TEMP: 3, 8.5, 13, 18, 20, 17, 13, II, 8; (temperature) FLOW: 0.12, 0.01, 0.09, 0.008, 0.07, 0.Oi;(in flows)
Fig. 11. M o n i t o r for a two-segmen t model .

S I M U L A T I O N M O D E L I N G S Y S T E M F O R A Q U A T I C ' BODIES 201
zooplankton but at different rates. The different parameters will be auto- matically substi tuted in the program block created for this process. The transformations of detritus are similar to Model A, as well as the monitor. For example, in Fig. 10 we present the trajectories calculated by this model.
Comparing the two models, one can see that going over from model A to model B almost half the flow definitions had to be reformulated. Neverthe- less, it is quite obvious that it was much easier for us to make these modifications in SIMSAB terms than to rearrange a program written on one of the traditional programming languages (Basic, Fortran, etc.).
Suppose now that we are to formalize a two-segment model, with dy- namics presented by Model A in one segment and by Model B in the other. Suppose that the two segments present a shallow bay with occassional blue-green blooms (Model B) and the deeper and colder main water body (Model A), with material exchanges between them due to wind-induced currents. In this case the monitor will be as presented in Fig. 11. We have used a standard function $HYDRO1 tO calculate patterns of wind-induced currents. Based on these patterns, function SMIX recalculates the concentra- tions of ecological components in both segments.
4. M O D E L ANALYSIS
The process of modeling is only started by the formation of the formal- ized representation of the object as a set of equations t ransformed into a Fortran program. In this form, in fact, models can only claim to be "representat ions of the accumulated . . . empirical information about the ecosystem and can solve only tasks of quantitative interpretation of the observations and verification of their mutual consistency" (Aizatullin and Shamardina, 1980, p. 155). In actuality, a big system - the water body - is substi tuted by another big system - the model - the dynamics of which is still to be studied.
Recently, more and more attention has been drawn to problems of model analysis (Shaeffer, 1981; Somlyodi, 1981; Summers and McKellar, 1981; Halfon, 1983a, b; etc.) - to estimations of their sensitivity, adequacy, accuracy of forecasts, to various methods of their calibration. Only a well analyzed model can serve as a tool of ecosystem research and provide new knowledge about aquatic bodies.
The SIMSAB procedure of model analysis (Fig. 4) includes a number of modules which can: - estimate model sensitivity with respect to parameters and forcing func-
tions; - estimate model stability and robustness (that is, define the extreme
deviations of parameters and forcing functions which do not result in

202 A.A. V O I N O V A N D A.A. A K H R E M E N K O V
inadequate model trajectories those tending to the negative domain or to infinity);
- calibrate models according to experimental data. Besides, since SIMSAB allows one to modify the model itself easily, the
structural sensitivity of models can be estimated; that is, the model sensitiv- ity to variations of its structure: addition or exclusion of variables a n d / o r links, modification of formalizations of interactions.
Unfortunately, an accurate model analysis, its adequacy test, various statistical estimates of forecast reliability, studies of long-term scenarios of ecosystem development can be performed only for models of low complex- ity. And only in this case model results are easy to interpret, and only such models usually find applications in decision making. However, simple mod- els, representing the ecosystem by several aggregated variables, as well as regression models, that take no account of the physical and ecological background of processes and mechanisms in a water body, can represent ecosystem dynamics only in the neighborhood of its steady-state, overlook- ing all possible structural modifications in the ecosystem. But, obviously, any structural rearrangement which was not stipulated by the model results in its total inadequacy. Accordingly, the decision-making based on simple models is somewhat risky: we can never be sure that certain impacts will not result in structural variations in the ecosystem.
As a result we come across a conflict when, on the one hand, detailed models which take into account the evolution of the ecosystem, cannot be analyzed and verified in a proper way, and consequently do not seem to be reliable enough, and, on the other hand, simplified models with totally known behavior turn to be absolutely inadequate under external effects that are strong enough to cause structural modifications of the ecosystem and pull it away from the steady state.
In this context the SIMSAB service programs provide certain ways of aggregation of variables and simplification of models. Besides, in these programs we follow the general lines of SIMSAB according to which all products of the modeling system are portable Fortran programs. Thus, complicated models of high dimensionality can be analyzed on big com- puters, while the assembly of programs and analysis of simple models is performed on personal computers.
5. C O N C L U S I O N
As computers become more and more widespread, methods of mathe- matical analysis become available for an increasing number of users, and it becomes most urgent to develop convenient user-friendly tooling, which

S I M U L A T I O N M O D E L I N G S Y S T E M F O R A Q U A T I C B O D I E S 203
requires no special mathematical background. It is only natural that the most popular software is that which encloses its conceptual nucleus into a special environment that facilitates learning and applications of the soft- ware.
Since one of the goals of SIMSAB is to bring methods of simulation modeling into the biological media, naturally it is accomplished by a number of auxiliary programs which give an overview of some basic principles of simulation modeling in general, and describe basic SIMSAB postulates in particular, allowing even a layman to master this system. SIMSAB-helper provides the user with all necessary information when working with the system.
It is this user orientation that allows us to hope that SIMSAB and other modeling packages of this kind will bring together ecological and mathe- matical studies in an interactive mode to obtain new insights into principles of ecosystem operation and more adequate representations of ecosystem dynamics. The second computer revolution, which started with the advent of the personal computer, brought computing and information-processing facil- ities directly to the natural and humanitarian scientist. This actually gives a new means of interdisciplinary communication: through a system of com- puter formalized languages, which would be equally understandable to representatives of different disciplines, and could interpret knowledge from various branches of science in terms of some common formalism.
As against mathematics, natural sciences are much more qualitative in their methodologies and speculations. It is the strict reasoning of mathe- matics, which is barely conceivable by naturalists and hinders the mutual efforts in ecological studies. However, if we assume certain postulates, qualitative reasoning can be at least partly automatically translated into quantitative formulations good for computer or mathematical analysis. This is actually the first goal of SIMSAB; the second is to secure modellers themselves from technical errors in programs and to free them from some routine programming work.
6. REFERENCES
Aizatullin, T.A. and Shamardina, I.P., 1980. Mathematical modeling of ecosystems of continental water bodies. Biogeocenology. Hydrobiology. Vol. 5. Achievements of Science and Technics, VINITI, USSR Academy of Sciences, Moscow, pp. 154-228 (in Russian).
Akhremenkov, A.A., 1988. Modeling complex for aquatic ecosystem simulations. Computer Centre, USSR Academy of Sciences, Moscow, 48 pp. (in Russian).
Alekseev, V.V., 1976. Dynamic models of aquatic biogeocenosis. In: Man and Biosphere, 1. Moscow State University, Moscow, pp. 3-157 (in Russian).
Arnold, E.M. and Voss, D.A., 1981. Numerical behaviour of a zooplankton, phytoplankton and phosphorus system. Ecol. Modelling, 13: 183-193.

204 A.A. V O I N O V A N D A.A. A K H R E M E N K O V
Brennan, R.D. and Silberberg M.Y., 1968. The system/360 continuous modelling program. Simulation, 11: 301.
Chen, C.W. and Orlob, G.T., 1975. Ecologic simulation for aquatic environments. In: B.C. Patten (Editor), Systems Analysis and Simulation in Ecology, 3. Academic Press, New York, pp. 475-588.
Dejak, C. and Pecenik, G. (Editors), 1987. Mathematical Modelling of Eutrophication and Dispersion in the Lagoon of Venice. Ecol. Modelling, 37(1/2), 130 pp.
Di Toro, D.M. and Connolly, J.P., 1980. Mathematical models of water quality in large lakes. Part 2: Lake Erie. EPA Rep. 600/3-80-065, U.S. Environment Protection Agency, Duluth, MN, 232 pp.
Di Toro, D.M. and Matystik, W.F., Jr., 1980. Mathematical models of water quality in large lakes. Part 1: Lake Huron and Saginaw Bay. EPA Rep. 600/3-80-056, U.S. Environment Protection Agency, Duluth, MN, 166 pp.
Di Toro, D.M., O'Connor, D.J. and Thomann, R.V., 1971. A dynamic model of the phytoplankton population in the Sacramento San Joaquin Delta. Adv. Chem., 106: 131-180.
Di Toro, D.M., O'Connor, D.J., Thomann, R.V. and Mancini, J.L., 1975. Phytoplankton-zo- oplankton-nutrient interaction model for Western Lake Erie. In: B.C. Patten (Editor), System Analysis and Simulation in Ecology, 3. Academic Press, New York, pp. 423-474.
Forrester, J.W., 1961. Industrial Dynamics, MIT Press, Cambridge, MA. Hakamata, T., Hirosaki S., Sekine Y., Suzuki Y. and Kato S., 1986. Interactive software tools,
BGS-II and BGS-III, for ecological simulation. Ecol. Modelling, 32: 71-84. Halfon, E., 1983a. Is there a best model structure? I. Modeling the fate of a toxic substance in
a lake. Ecol. Modelling, 20:135 152. Halfon, E., 1983b. Is there a best model structure? II. Comparing the model structures of
different fate models. Ecol. Modelling, 20: 153-163. Hall, C.A.S., 1988. An assessment of several of the historically most influential theoretical
models used in ecology and of the data provided in their support. Ecol. Modelling, 43: 5-31.
Ivanishev, V.V., 1986. Automatization of modeling of flow systems. Nauka, Leningrad, 142 pp. (in Russian).
Jorgensen, S.E., 1980. Lake Management. Pergamon, Oxford, 167 pp. Jorgensen, S.E., Mejer, H. and Friis, M., 1978. Examination of a lake model. Ecol. Modelling,
4: 253-278. Knijnenburg, A., MatthSus, E. and Wenzel V., 1984. Concept and usage of the interactive
simulation system for ecosystem SONCHES. Ecol. Modelling, 26: 51-76. Krapivin, V.F., 1978. On the Theory of Viability of Complex Systems. Nauka, Moscow, 247
pp. (in Russian). Kutas, T. and Herodek, S., 1983. BEM: A Complex Model for Simulating the Lake Balaton
Ecosystem. In: Eutrophication of Shallow Lakes: Modelling and Management. The Lake Balaton Case Study. IIASA CP-83-$3, International Institute for Applied Systems Analy- sis, Laxenburg, Austria, pp. 257-272.
Leonov, A.V., 1981. Applying the Balaton sector model for analysis of phosphorus dynamics in Lake Balaton, 1976-1978. IIASA WP-81-118, International Institute for Applied Sys- tems Analysis, Laxenburg, Austria.
Loehle, C., 1983. Evaluation of theories and calculation tools in ecology. Ecol. Modelling, 19: 239-247.
Matsumura, T. and Sakawa, Y., 1980. Non-linear analysis of nitrogen cycle in aquatic ecosystems. Int. J. Syst. Sci., 11: 803-816.

SIMULATION MODELING SYSTEM FOR AQUATIC BODIES 205
Park, R.A., Groden, T.W. and Desormeau, C.J., 1979. Modifications to the model CLEANER requiring further research. In: D. Scavia and A. Robertson (Editors), Perspectives on Aquatic Ecosystem Modeling. Ann Arbor Sci. Publ., MI, pp. 87-108.
Riley, M.J. and Stefan, H.G., 1988. MINLAKE: a dynamic lake water quality simulation model. Ecol. Modelling, 43: 155-182.
Shaeffer, D.L., 1980. A model evaluation methodology applicable to environmental assess- ment models. Ecol. Modelling, 8: 275-295.
Shaffer, W.A., 1980. DYNAMO. Simulation, 34: 134-136. Somlyody, L., 1981. Modeling of a complex environmental system. The Lake Balaton Study.
IIASA WP-81-108, International Institute for Applied Systems Analysis, Laxenburg, Austria.
Steele, J.H., 1962. Environmental control of photosynthesis in the sea. Limnol. Oceanogr., 7: 137-150.
Summers, J.K. and McKellar, Jr., H.N., 1981. A sensitivity analysis of an ecosystem model of estuarine carbon flow. Ecol. Modelling, 13: 283-301.
Svirezhev, Yu.M., 1983. Modern problems of mathematical ecology. In: Proc. International Congress of Mathematicians, Warszawa, 1677-1693.
Volterra, V., 1927. Essai Math6matique sur les Fluctuations Biologiques. Bull. Soc. Oceanogr. France.
Wang, L.K., Vielkind, D. and Wang, M.H., 1978. Mathematical models of dissolved oxygen concentration in fresh water. Ecol. Modelling, 5: 115-123.