Embed Size (px)
Citation preview

Simulating and Animating Social Dynamics:Embedding Small Pedestrian Groups in Crowds
paper id: 37
AbstractWe present a crowd model derives fromCommon Ground theory to accommodatehigh-level socially-aware behavioral real-ism of characters in crowd simulations.Our approach provides a means to simulatepurposive coordinating behavior of humangroups, and the resulted character behaviorsthat form consequential chain which is inter-preted as a coherent story by observers. Wedemonstrated that our model produces morebelievable animations from the viewpoint of hu-man observers through a series of user studies.
Keywords: group modeling, crowd simu-lation, common ground theory
1 Introduction
Incorporating the sense of social intelligence forvirtual characters is important to achieve plau-sible aggregate behavior in crowd simulations.Crowds are typically made up of multiple socialgroups [1, 2], and generating believable groupbehaviors within a crowd has been a focus ofmany researchers in recent years [3, 4, 5, 6].
A group is a social unit comprising severalmembers who stand in status and relationshipswith one another. Behaviors of individual mem-bers are regulated in matters of consequence tothe group. In group activities, people performactions such as body movements, gestures, andeye gazes as means of participating with othersin the group. While, crowd simulation applica-tions that consider group organization typicallyfocus on overall formations and inter-memberdistances, Park et al. showed that communica-tive behavior within individual groups can im-
pact the distribution of the simulated crowd as awhole [7, 8]. Applying Herbert Clark’s Com-mon Ground (CG) theory [9] to model groupbehaviors in simulation, they demonstrated theimpact of incorporation of their model on thedynamic congestion distribution in simulations,but did not show that the model produced morecorrect or believable simulations.
We extend the group communicative behav-ior model due to Park et al. to accommodatehigh-level socially-aware behavioral realism ofcharacters in a crowd simulation. In narrativepsychology, Bruner advanced an idea that hu-mans make sense of intentional behaviors bytaking them into narrative structures [10]. Weemploy this concept to test our operationaliza-tion of the CG-based crowd simulation (CGCS)model by determining whether the model yieldspurposive interpretations of the resulting anima-tion. Through a series of perceptual user evalu-ation studies, we demonstrated the interpretabil-ity of the character behaviors is associated withthe believability of the animation by observers.
The remainder of this paper is organized asfollows. In section 2, we discuss related worksand Clark’s common ground theory. Section 3provides the design of our multi-agent system.The CGCS model is described in Section 4. Sec-tion 5 presents the design of our user studies andthe results. We draw conclusions and providepossible future research directions in Section 6.
2 Related work
There have been extensive research on simulat-ing crowd behaviors, and we refer the readersto the surveys [11, 12]. We review some of themost relevant work to the group modeling, and

Clark’s common ground theory in this section.
2.1 Groups within Crowds
The incorporation of small group dynamics intoa crowd model has been the focus of recent re-search interest. In some studies, walking pat-terns and spatial organizations of small groupsare analyzed from collected video recordings [3,13, 14]. The observed formations are repre-sented as reference templates in a local coordi-nate system of a group and used to guide eachgroup member’s relative position [3]. Numeri-cal models to include such formation influencesare proposed in [13, 14, 15]. Maintaining thedesired formations while walking is formulatedas a collective optimization problem for groupmembers in [4]. However, walking in a group isnot just a matter of how to maneuver to reach adesired position at a low level. People commu-nicate with other members, and trade off certainaction, path, and location according to the par-ticular situation of a group. It is hard to mecha-nistically construct such higher-level behavioralactivity completely from bottom up.
Data-driven (motion capture) methods of sim-ulating various interactive motion patterns ingroups are presented in [16, 17]. However, theseapproaches are expensive techniques because ofthe computational complexity to create connect-ing transitions between data segments, and alsosuffer from the lack of flexibility.
A behavioral aspect in group dynamics isalso considered. The effect of actions and ges-tures, such as interacting distance, orientation,and synchrony of visual and aural cues of ac-tions, on the plausibility of conversing groupshave been identified and applied to the simula-tion of groups of conversing characters in [5, 6].However, in these approaches, the selection ofstance, movement, and motion is not tightly cou-pled to the underlying simulation model, and thesequence of character gestures does not drawa socially meaningful story. In our work, allcharacter actions form a consequential chain sothat results in a coherent story. Also, their ap-proaches focus on generating static conversingcharacters, thereby limiting applications. Ourmodel can handle sub-goals that may be gen-erated stochastically or through interaction be-tween agents and the environment, and brings a
variety of group interaction and movement pat-terns into simulations.
2.2 Common Ground Theory
People engage in a joint activity when they actin coordination with others to pursue a com-mon goal. Clark’s CG model views executionof a joint activity as a continuous negotiationamong participants to maintain coordinated ac-tion. It considers the mutual knowledge, be-liefs, and assumptions among collaborating in-dividuals. The CG concept has seen applicationin AI agents [18], joint robot activity [19], andComputer-Supported Cooperative Work [20].
According to Clark, p is common ground formembers of group G if and only if [9]:
1. members of G know that p;
2. members of G know that members of Gknow that p;
3. members of G know that members of Gknow that members of G know that p.
Suppose that A and B walk in an airport ter-minal. As they pass a schedule board, A thinksthat they should check the departure flight infor-mation, and informs B of her plan to go to theboard and to return to their current location, x.We denote the plan to divide and reunite at x asP . For the plan to succeed,A needs to know thatB knows the plan P , and vice versa. This, how-ever, is insufficient for coordination. B needs toknow that A knows that he is privy to P , oth-erwise he might not be convinced that A willreturn to x. Furthermore, if the agreement endshere, A may not know that B knows that sheknows the plan, and may, therefore not be con-fident to execute the plan. Hence, A needs toknow that B knows that she knows the plan.
The CG may be arrived at verbally, or may beenacted through action. E.g., A may signal herintention by pointing toward the schedule boardand pointing to their current location x. This re-quires that B be within the range of sight and belooking at A. A needs to see that B is lookingat her, and has signaled agreement (e.g., by nod-ding). B needs to see that A sees his nodding.Finally A needs to see that B sees that she hasseen and acknowledged the plan.

3 Multi-Agent System
We operationalize our CGCS model for multiagent systems using agent-based modeling ap-proach. Agents are capable of perceiving andresponding to their immediate surroundings,and are organized into groups or ‘co-travellers’.Group members maintain group cohesivenessby communicating and adapting their behaviorsto each other. In the course of interaction, anagent may present gestures or other behavioralcues according to its communicative purpose.To accomplish this, our model maintains thecommunicative purpose of agents consistentlyfrom simulation through animations. We believethat this will produce more realism both in theoverall simulation and individual animations ofthe agents.
3.1 Group Model
Our model assumes that the group member-ships and eventual goal of groups are known inadvance and not subject to change throughoutthe simulation. Members of groups are collo-cated at start, and have the same final goal lo-cation. Goals are specific and definable geo-graphic points in a given virtual environment. Aglobal path that is used for collision-free naviga-tion around static obstacles toward a final goalis precomputed for each group. The set of allmembers of group k is denoted Gk. We han-dle individuals in our simulation by permittinggroups with a single member.
3.2 Agent Model
An agent with its personal identifier i is denotedas Ai. At the initial status of simulation, a groupmembership is assigned to each agent. A groupmay deviate from an original travel plan withgoal interrupts to members of the group. For ex-ample, a member of a group may be triggeredto visit the restroom (stochastically generatedsub-goal) or to check a nearby schedule boardfor the flight information in an airport scenario(sub-goal generated through interaction with theenvironment), then the agent proposes a plan tosatisfy the sub-goal to the group.
As an available environmentally driven goal,each agent maintains a list of interests Ii,α, α =
1, . . . ,K and corresponding propensity-to-visitvalues ranging from 0 to 1.0. When encounter-ing some points of interest, an agent comparesits propensity-to-visit value to the attraction in-tensity of the place, and selects potential sub-goals.
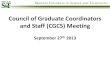
In order to interact with group members, anagent should be able to understand status andintentional signals of the members and adapt itsbehaviors. We model an agent as having sen-sory capabilities for speech, vision, and touch.Figure 1 shows an agent’s sensory model witha perception geometry. Touch can be sensedwithin range of agent radius r, hearing is omni-directional with range limitation dh, and visionis directional and is effective up to a range, dv,along its gaze direction (for simplicity, body ori-entation is synonymous to gaze direction in oursimulation) and within a field of view defined byan angle, α.
! dVdhr
Figure 1: Agent perception geometry
4 Model of Social GroupBehaviors
At each time step, a group travels toward a fi-nal goal by following a preplanned global path.A group walks in a clustered way by minimiz-ing the distance between members while avoid-ing collisions to each other. When a sub-goal istriggered, the group evokes a set of coordinationbehaviors.
Figure 2 illustrates the behavior decomposi-tion in our model into: 1) macro-coordination,2) micro-coordination, and 3) atomic actionunits. Macro-coordination relates to the over-all high-level activity determining the spatialmovements of group members over time to ac-complish a navigation goal and sub-goals ofa group. The plan of divide and wait in theairport scenario in Section 2.2 is an exampleof a macro-coordination behavior. The micro-coordination plan simulates the negotiation ofCG among group members to decide on a

Communication Initiation(RAB 1)
RAB 2
... Macro Coordination Plan
high-level group activities
Agent A presenting
physical action
Comm.Intent 1
Comm.Intent 2
Comm.Intent 3
Comm.Intent n
Agent B presenting
physical action
RAB 3
RAB n
Micro Coordination Plan
Atomic Action
Figure 2: Behaviors decomposition in theCGCS model
macro-coordination plan given a new sub-goal.A micro-coordination plan may be further de-composed into a set of ‘purposive’ action blocksof reciprocal actions among the groups (henceReciprocating Action Block, or RAB). RABmay specify that an agent needs to gain the at-tention of its group members, indicate the loca-tion of a sub-goal, or specify a meeting pointfor the group after the sub-goal is completed.Atomic actions are behavior pieces that may beanimated, and can be used to build the RABor the actions needed to accomplish a macro-coordination plan.
4.1 Macro-Coordination
When a sub-goal is triggered, a group may se-lect a macro-coordination plan from a prede-fined set of possible plans. This set of plans aredesigned to satisfy the needs of particular simu-lation/animation requirements.
For instance, in an emergency scenario, a setof macro-behaviors may be to abandon an orig-inal goal and find the nearest exit, to follow anauthority figure, or to find a missing member,and a military simulation may specify doctrine-specific coordination plans. The plan selec-tion is based on a probabilistic preference func-tion, and members of a group share the cho-sen macro-coordination plan by each doing theirparticipatory actions in particular roles. The se-lection of a macro-coordination plan results in aset of values for heading direction, desired posi-tion, and velocity for those agents involved in agroup activity.
Because our interest is on generating socialinteraction behaviors of agents in a pedestrian
simulation, we provide four macro-coordinationplans for the most common navigation strate-gies. The four macro-coordination plansare ‘detour-together, ‘divide-and-wait’, ‘divide-and-meet’, and ‘divide-and-proceed’.
If a ‘detour-together’ plan is selected, the en-tire group detours together when a group mem-ber has to go to some point of interest. This planreflects the follow-the-leader behavior, which isa commonly adopted approach for simulatinggroup behaviors in other work [14, 21]. In the‘divide-and-wait’ plan, an agent heads for a sub-goal by itself while the rest of a group membersstay at the current location. After it achievesthe sub-goal, the divided agent returns to whereit left the group members. If different sub-goals are simultaneously generated for multipleagents, the ‘divide-and-meet’ behavior allowsfor all agents or sub-groups to go and executetheir sub-goals and return to the point of separa-tion. This plan can be thought as analogous toa temporary sub-group generation observed inreal group movements [3]. Once all parties haveaccomplished their sub-goals, they return to theprevious location where they divided up and re-sume the original navigation when the group isreconstituted. If the ‘divide-and-proceed’ planis selected, a member that received the sub-goaltrigger detours to visit a sub-goal while the restof members proceeds with their original naviga-tion plan. They reunite at the final goal location.
4.2 Micro-Coordination
In our model, micro-coordination relates to thesimulation of CG negotiation. We call this amicro-coordination because it is always situ-ated and local to the current group configuration.Figure 2 shows how a plan is composed of a setof RABs involving group members to simulateCG negotiation.
4.2.1 Reciprocating Action Block (RAB)
RAB consists of a set of actions to simulatethe execution of a specific unit of communica-tive intent (e.g., an agent getting the attentionof its interlocutors). An action block typicallyinvolves dual actions that need to be executedtogether or consecutively (e.g., the interlocutornods when the first agent waves in its field of

view). The utility of the block is thus to cre-ate cohesive atomic behaviors within a coordi-nation sequence. Table 1 illustrates such an ac-tion block in our airport scenario. A may signalher intention S of heading to a schedule boardby pointing toward it. This is followed by Bsignaling acknowledgement by nodding at A.
Table 1: RAB
Role Action Descriptionproponent A presents sa to B intending that Srespondent B takes up sa by presenting sb
Initially, an agent who receives a subgoal trig-ger is assigned with a proponent role. As thecommunication proceeds, the roles may be in-terchanged. For example, at the proposal of us-ing the ‘divide-and-stay’ macro plan from A, Bunderstands the intention of A but may suggestto use the ‘divide-and-meet’ plan by pointingwhere he wants to drop by. Then, in the nextchunk of RAB, B takes a proponent role and Abecomes a respondent.
4.2.2 Communication Initiation
The first RAB in a micro-coordination plan is al-ways the preparatory action needed to ensure ef-fective communication. For an agent who needsto initiate communication, it must first identifythe other member agent and the spatial relationbetween them.
The agent has to assess the state of the re-spondent agents with respect to their perceptionmodel described in Figure 1, and perform a nec-essary action to meet the condition for establish-ing communication. Figure 3 illustrates possible
B
A6
A4
A5
A1
A2A3xi
xj
Figure 3: Six possible spatial relations of groupmembers
spatial relations of any two agents, A and B. Inthis case, A is the initiator of an interactive ex-change. Hence A has to evaluate the state of
perception of B depending on where she is withrespect to B. There are six possible spatial re-lations, labeled A1 . . . A6 in the figure. If A de-termines it is in the A3 position, it is outside theimmediate perception ofB and has to move intoa position where one of her means of communi-cation is possible. A micro-coordination actionmay then be selected to move within B’s fieldof view (for example, position xi). The secondaction block is for A to get B’s attention (e.g.,by waving). An alternative action block may beto have A walk into hearing range (e.g., positionxj), before calling out to B to get his attention.
4.2.3 Chains of Coordination
An example of micro-coordination plan com-posed of a set of RABs between two agentsis shown in Table 2 (Note that a micro-coordination plan may be extended to includeany number of participants). A moves to bewithin B’s range of view in order to initiatecommunication. In the following RAB2, A maywave at B to get his attention, and B gives at-tention to A by turning at A. Next in RAB3, Amay point to the schedule board for indicatingthat she wants to check the departure time, andB looks at where she points as a response to hersignal. However, B wants to go to a restroom,so he points towards a nearby restroom and thento their current location. A understands what hemeans, so nods at him, in the RAB4 stage. AsB sees A’s nodding at him, B nods back to herto indicate that he knows that she got the plan.A finalizes that they are on the same plan, andboth take the movements.
Table 2: Micro-Coordinations plan, µγ
Step Action DescriptionRAB1 A moves to be within B’s view rangeRAB2-1 A performs a signaling action, sa.RAB2-2 B gives attention to A.RAB3-1 A proposes a macro plan, Pα (i.e. select Pα)RAB3-2 B signals his understanding of A’s intentionRAB4-1 B proposes a macro plan, Pβ (i.e. select Pβ )RAB4-2 A signifies acknowledgement for Pβ .RAB5-1 B accepts A’s acknowledgementRAB5-2 A finalizes the agreement on using Pβ .
If µγ is successful,Return TRUE (i.e. execute Pβ ),
Else Return FALSE (coordination failed)

4.3 Atomic Action
RAB specifies the reciprocating atomic actionsthat satisfies a particular communicative intent.More than one RAB may satisfy an commu-nicative intent, and the selection of RABs canprovide behavioral variability, leading to greaterbelievability. We show examples of the high-level communication intents and correspondingRABs (as atomic action pairs) in Table 3.
Table 3: Examples of communication intentsand corresponding micro-behaviors
Communication Intent RAB SelectedInitiate communication A moves into B’s view;
B turns toward ARequest attention A waves in direction of B;
B looks at A & nodsSuggest macro-behavior A points toward sub-goal;
B nods at A
5 Perceptual Study and Results
Our CGCS model derives from CG theory witha basis in extensive observational science, andprovides a means to simulate purposive behav-ior of human groups in interacting. The open re-search questions are whether this model is suit-able for crowd simulation, and whether our op-erationalization of the theory produces realis-tic crowd models. The question may be refor-mulated by asking whether our model producesplausible animations from the viewpoint of hu-man observers in a series of user studies.
Since our model decomposes the overall co-ordinated behavior of groups into Macro- andµicro-coordination components, we designed aset of pairwise-comparative studies to investi-gate the efficacy of the approach. In this section,we shall discuss the virtual setting in which ourtests are conducted, the study conditions tested,the design of the studies, and our study results.
5.1 Virtual Environment and Scenario
In our studies, the simulation takes place ina virtual airport setting. 2D and 3D repre-sentations of our airport model are shown inFigure 4. The airport terminal contains 10restrooms (blue squares), 16 flight scheduleboards (red squares), and 62 stores (yellowsquares) as potential sub-goals. Eight gates
(light purple squares) are generated as possiblefinal goals for agents. A* algorithm is used togenerate a global path for each Gk. An initialnavigation plan of G7 is drawn in navy blue ontop of the 2D map of the airport in Figure 4(a).
(a) 2D map (b) 3D animated sceneFigure 4: Airport terminal model
A crowd in each animation was made up of60 individuals, 104 groups of 2 individuals, 30groups of 3, 6 groups of 4, thus 200 groups intotal. This distribution of pedestrian was deter-mined by approximately following the informa-tion reported in [2]. However, to make the ges-tures of characters easily observable to viewers,the camera was set to focus at a few number ofgroups, but not at the overall scene.
For all of the individuals and agents of groups,one of the eight gates is selected as a final goal atrandom. Starting from initial positions, agentswalk around the terminal and eventually pro-ceed to the gate. A random event generatormay trigger agents to visit the nearest restroom.When agents pass by schedule boards and shops,they may be attracted to some of the places.RVO2 Library [22] was used to generate low-level collision-free steering decisions.
5.2 Simulation Condition
To test the degree of realism afforded by ourmodel, we generated a number of 30-second an-imations in the four conditions summarized inTable 4. We varied whether µ-coordination wasincluded in the simulation, and the kind of M -coordination strategies employed. When no µ-coordination is used, the groups just proceededto the M -coordination plan once a sub-goal isintroduced. In CDT and CµDT, the groupsalways chose commonly used detour-togetherstrategy [14, 21], and in the CM and CµM con-dition, our four Macro-coordination plans de-scribed in Section 4.1 were employed.

Table 4: Study Conditions
Condition µ-Coordination M -CoordinationCDT No Detour-TogetherCµDT Yes Detour-TogetherCM No VariedCµM Yes Varied
5.3 Study Design
We tested our study conditions using a pairwisecomparison design. To determine the effect ofmicro-coordination on human perceptions of thecrowd behaviors produced by our model, wecompare CDT vs CµDT, and CM vs CµM. Thefirst comparison tests the effectiveness of intro-ducing CG to the common detour-together strat-egy [14, 21], and the second comparison teststhe effectiveness of adding CG to a more var-ied set of macro-coordination strategies. We usetwo measures as our dependent variable. Thefirst, MR, measures the participant’s estimationof the realism of a simulation, and the secondMP measures the participant’s estimation of theplausibility of a simulation.
For each pair of model comparisons, the par-ticipant were shown several animation pairs thatwere generated using the two models. That is,each participant was shown 10 pairs of differentCDT and CµDT, and 11 pairs of different CMand CµM animations. The order of the presen-tations were randomized. We followed a within-subjects design, therefore all of the participantswere shown the 21 pairs of animations.
Our study consists with three tasks. The firsttwo tasks are for the realism and plausibilitymeasures. The third task is for investigating par-ticipants’ understanding of character behaviors.
For our realism measure, we employ a coverstory to avoid demand characteristic biases. Foreach pair of simulations presented, the partic-ipant was told that one animation was derivedfrom tracking data from a real crowd, and theother was synthetically generated. The partici-pant was given a forced choice task of determin-ing which was ‘Real’ and which was synthetic.MR measures the realism estimate for a simu-lation condition as the fraction of the number oftimes a simulation in that condition is rated as‘Real’ across multiple exposures. For example,if a participant judges 7 of the 10 CµM simula-tions as being from ‘real data’, then CµM has a
MR score of 0.7 (and CM has a MR score of0.3).
For our plausibility measure, participantswere asked to say if the behaviors of the groupsin a particular simulation are plausible on a 7-point likert scale. Hence for our 10 presenta-tions, each simulation model will have 10 lik-ert scores. The plausibility measure MP of themodel is the average of the 10 likert scores.
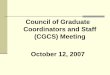
To obtain a better understanding of the cri-teria used by our participants to judge plausi-bility, an additional pair of CM and CµM sim-ulations were shown to the participants wherethree members of a group select the ‘divide-and-stay’ plan. This time, we highlighted aparticular group of agents in each simulation(with a white circle). Participants were askedto describe their impression and understandingof character behaviors in the animations theysaw. The rationale for this third study con-dition is the notion of ‘narrative intelligence’whereby one’s belief concerning the truth of aphenomenon is dependent on one’s ability to ex-plain the phenomenon [10, 23]. At the end ofour 3-part study, the participants were given asemi-structured interview to gain better insightfor how they judged the realism and plausibilityof the simulations.
Three characters walking together
(CM): One member leaves without communication
(CμM): Members communicatingto each other
Two members waiting on the other
Figure 5: A paired CM and CµM animations
Figure 5 shows some animation scenes fromthe pair of CM and CµM which was used for thistask. Characters start from the same initial posi-tions (Figure 5 (a)) and the focused groups selectthe divide-and-stay plan (Figure 5 (c)). Beforea split occurs, the characters exchange commu-nicative actions in the CµM condition (bottomof Figure 5 (b)) while they simply leave eachother in the CM condition (top of Figure 5 (b)).

5.4 Procedure
42 volunteers (28 females, 14 males), aged 18to 38, were recruited for the study. At the be-ginning of the study, we showed them a demovideo of our virtual airport terminal with a largenumber of virtual characters.
5.5 Results and Discussion
5.5.1 Quantitative Analysis
We hypothesized that groups employing µ-coordination would appear more realistic andbelievable than the groups without the µ-coordination. Specifically, we hypothesized thatgroups in CµDT and CµM simulations wouldscore higher MR and MP than those in CDTand CM simulations, respectively. Paired t-tests were conducted to compare MR values forCDT and CµDT, and CM and CµM animations,and MP values for CDT and CµDT, and CMand CµM animations.
We found a significant effect of incorporatingsocial behaviors of coordination in the partici-pants’ responses on the crowd animations. Fig-ures 6 (a) and (b) show that participants chosethe CµDT groups as real more often than theCDT groups (p < 0.01), and CµDT groups asmore plausible than the CDT groups (p < 0.01).The analysis results in Figures 7 (a) and (b) alsoconfirm that participants rated the CµM groupsas real more often than the CM groups (p <0.01), and CµM groups as more plausible thanthe CM groups (p < 0.01).
(a) MR (b) MP
Figure 6: CDT vs CµDT
(a) MR (b) MP
Figure 7: CM vs CµM
5.5.2 Qualitative Analysis
We employed two qualitative approaches to an-alyze our qualitative data. First, we analyzed theparticipants’ responses for objective statementsof belief concerning each model in the third task.This allows us to determine why one model wasjudged as more believable than another. For theCM animation, 10 participants stated that theywere not sure on what was going on in the an-imation (e.g., “it seems strange, the people ran-domly stop and one person leaves”). 24 partici-pants provided just a factual description of whatthey witnessed without providing any reasonsfor what they saw, for example, “one guy in asuit walked away while others are standing.” 10among these 34 indicated that they thought thecharacters are not with together (e.g., “I thinkthe first two are traveling together, and the guy atthe end wasn’t with them”). 8 subjects made aninterpretation in which they assumed the groupmembers communicated before they split up.
In contrast, for the CµM animation, 40 sub-jects indicated that they had a better understand-ing of the character behaviors, and interpretedthe split as resulting from negotiation (e.g., “oneof the character actually told the other two char-acters to wait on him”). 10 of the 40 subjectsexplicitly stated that the CµM animation wasmuch more clear, and it was due to the exhibi-tion of communicative acts of characters (e.g.,“there was obvious communication between themembers of the group so it was very direct and Ididn’t have to assume what was going on”), and11 of them added more stories into their descrip-tion (e.g., “he might say something like ‘do youknow where we have to go,’ so he checks...”). 2provided the similar factual description to whatthey had for the CM animation.
In the semi-structured post interview, weasked participants what criteria they used toevaluate animations. To obtain categories forthe rationale for the participants’ beliefs, we em-ployed an open coding method [24]. We per-formed two passes through the data. In the firstpass, we collected categories of responses con-cerning belief, and in the second, we employedthese categories to group the participants’ re-sponses.
Through our analysis, we were able to deter-mine three categories for reasons that the par-

ticipants rated the CG model as more believ-able. The three categories of rationale are: In-teraction, Formation, and Cohesion. In theInteraction category, participants were atten-tive to whether there was evidence of interac-tion among characters before stopping or chang-ing direction while walking (e.g., exchangeof gestures, body alignments to talk). Sub-jects answered that the characters with the µ-coordination behaved in a way that allows themto structure the sequence of behaviors into a nar-rative whole, and makes the animation be morecomprehensible and believable. For the For-mation category, spatial patterns of groups suchas side-by-side walking and linear walking for-mation were considered. In the Cohesion cate-gory, subjects looked for whether group mem-bers maintained appropriate proximity and/orrespected group integrity (i.e. circumnavigatedother groups rather than just cutting throughthem). As shown in Figure 8, 34 participantsemployed Interaction, 5 used Formation, and3 used Cohesion as their criteria to make theirevaluations.
0 5
10 15 20 25 30 35 40
Interac/on Forma/on Cohesion
Figure 8: Criteria used to evaluate animations
Our results demonstrate that the believabilityof an animation is affected by communicativeand social interactions among characters. Peo-ple are attentive to not only what the charac-ters do but also why, because they try to un-derstand the chains of character behaviors byconstructing a coherent story [10]. People rateda given animation realistic and more plausiblewhen they thought a specific walking strategy(e.g., divide-and-stay) of a group was made as aresult of communication among the characters.This indicates that the meaning of behaviors ofindividuals in group activities is not decidable inisolation but people relate the behavior to the be-havior of interacting entities to understand them.It is shown that the comprehensibility may beessential to believable agents, and this suggests
that the model of character behaviors should bedesigned to provide interpretability, or rational-ity, to external observers in order for achievingthe enhanced realism.
6 Conclusion
In this paper, we presented a model of socialgroup behaviors using Clark’s Common Groundtheory to accommodate high-level sociality ofcharacters in a crowd simulation. The CGCSmodel enabled our agents to present commu-nicative behavioral cues in coordination withother agents in a group. We conducted a userstudy in which the efficacy of our CGCS modelwas examined. The study results showed thatthe communicative purpose in our model can beconsistently carried through from simulation toanimation, and it produces more believable be-haviors of animated characters from the view-point of human observers.
Our future research direction includes extend-ing our model to handle subgroups and varioustypes of relationships. In the real world, indi-viduals are embedded in different social struc-tures simultaneously, such as subgroups (e.g.,parents, siblings), groups (e.g., family), and or-ganization (e.g., pedestrians). Also, intergroupties could vary (e.g., pedestrians-pedestrians,pedestrians-authority figures). The different so-cial relationships may have an impact on the useof micro-coordination and macro-coordinationstrategies. For example, pedestrian-pedestriancoordination will require the construction of adhoc proximal groups with different strategies.Such extension will provide interesting chal-lenges to extensions of our model.
References
[1] J. S. Coleman and J. James. The equi-librium size distribution of freely-forminggroups. Sociometry, 24(1):pp. 36–45,1961.
[2] A. F. Aveni. The Not-So-Lonely Crowd:Friendship Groups in Collective Behavior.Sociometry, 40(1):96–99, 1977.
[3] C. Peters and C. Ennis. Modeling groups

of plausible virtual pedestrians. IEEEComput. Graph. Appl., 29(4):54–63, 2009.
[4] I. Karamouzas and M. Overmars. Sim-ulating and evaluating the local behav-ior of small pedestrian groups. IEEETrans. on Visualization and Comp. Graph-ics, 18(3):394–406, 2012.
[5] C. Ennis, C. Peters et al. Perceptual effectsof scene context and viewpoint for virtualpedestrian crowds. ACM Trans. Appl. Per-cept., 8(2):10:1–10:22, 2011.
[6] C. Ennis and C. O’Sullivan. Perceptuallyplausible formations for virtual conversers.Computer Animation and Virtual Worlds,23(3-4):321–329, 2012.
[7] S. I. Park, F. Quek et al. Modeling socialgroups in crowds using common groundtheory. In Proceedings of the Winter Sim-ulation Conference, pages 113:1–113:12,2012.
[8] S. I. Park, F. Quek et al. Modeling agentsocial joint actions via micro and macrocoordination strategies. In Web Intelli-gence and Intelligent Agent Technology,2012 IEEE/WIC/ACM Intl. C. on, 2012.
[9] H. H. Clark. Using Language. CambridgeUniversity Press, 1996.
[10] J. Bruner. The narrative construction of re-ality. Critical inquiry, 18(1):1–21, 1991.
[11] D. Thalmann and S.R. Musse. CrowdSimulation. Springer-Verlag London Ltd,2007.
[12] N. Badler, J. Allbeck, and N. Pelechano.Virtual Crowds: Methods, Simulation, andControl (Synthesis Lectures on ComputerGraphics and Animation). Morgan andClaypool Publishers, 2008.
[13] M. Moussaı̈d, N. Perozo, et al. The Walk-ing Behaviour of Pedestrian Social Groupsand Its Impact on Crowd Dynamics. PLoSONE, 5(4):e10047+, 2010.
[14] S. Lemercier, A. Jelic, et al. Realis-tic following behaviors for crowd simula-tion. Comp. Graph. Forum, 31(2):489–498, 2012.
[15] F. Qiu and X. Hu. Modeling group struc-tures in pedestrian crowd simulation. Sim-ulation Modelling Practice and Theory,18(2):190 – 205, 2010.
[16] E. Ju, M. G. Choi, et al. Morphablecrowds. ACM Trans. Graph., 29(6):140:1–140:10, 2010.
[17] M. Kim, Y. Hwang, et al. Tiling mo-tion patches. In Proc. of the 2012ACM SIGGRAPH/Eurographics symp. onComp. animation, 2012.
[18] G. Klein, P. J. Feltovich, et al. Com-mon ground and coordination in joint ac-tivity. Organizational Simulation, pages139–184. John Wiley and Sons, Inc., 2005.
[19] R. Kirby, R. Simmons, et al. Compan-ion: A constraint-optimizing method forperson-acceptable navigation. In Robotand Human Interactive Communication,The 18th IEEE International Symposiumon, pages 607–612, 2009.
[20] D. C. Neale, J. M Carroll, et al. Evaluat-ing computer-supported cooperative work:models and frameworks. In Proc. of theACM conf. on Comp. supported coopera-tive work, pages 112–121, 2004.
[21] C. Reynolds. Steering Behaviors for Au-tonomous Characters. In Game Develop-ers Conference, 1999.
[22] J. van den Berg, S. J. Guy et al.Rvo2 library: Reciprocal collision avoid-ance for real-time multi-agent simula-tion. http://gamma.cs.unc.edu/RVO2/, 2011.
[23] M. Mateas and P. Sengers. Narrative Intel-ligence. Advances in Consciousness Re-search Series. John Benjamins Pub., 2003.
[24] A. L. Strauss and J. M. Corbin. Basicsof qualitative research: grounded theoryprocedures and techniques. Sage Publica-tions, 1990.