Embed Size (px)
Citation preview

Simple Proportional Integral Controller Tuning Rules for FOPTD andHOPTD Models Based on Matching Two AsymptotesJietae Lee,*,† Yongjeh Lee,‡ Dae Ryook Yang,‡ and Thomas F. Edgar§
†Department of Chemical Engineering, Kyungpook National University, Daegu 702-701, Korea‡Department of Chemical and Biological Engineering, Korea University, Seoul 136-713, Korea§Department of Chemical Engineering, University of Texas at Austin, Austin, Texas 78712, United States
ABSTRACT: Many methods are available to tune proportionalintegral (PI) controllers for first order plus time delay (FOPTD)models of overdamped processes. The two asymptotes for smalland large ratios of time delays over time constants are easilycalculated. These two asymptotes can be used to evaluate andprovide guidelines for the performance and application ranges ofPI controller tuning rules. By matching these two asymptotes, asimple analytic tuning rule is suggested. For some overdampedprocesses whose transfer functions have large zero terms, half-order plus time delay (HOPTD) models are found to yield betterresults than the FOPTD models. Applying the technique ofmatching two asymptotes, a simple analytic PI controller tuningrule has also been proposed for the HOPTD models. To apply these tuning rules to high order processes with known transferfunctions, model reduction methods to obtain the FOPTD and HOPTD models are investigated. Simulation results for empiricaland full models of processes show the performances of the proposed model reduction methods and tuning rules.
1. INTRODUCTION
Proportional integral (PI) controllers are the dominantcontrollers in the process industries.1,2 Although they haveonly two tuning parameters, field tuning requires systematicmethods. The Ziegler−Nichols method3 is one of the earliersuccessful methods to tune PI controllers. It designs the PIcontrollers with the ultimate gain and the ultimate period, but itis criticized for providing too-oscillatory closed-loop responses.The Cohen−Coon method4 uses the first order plus time delay(FOPTD) model of process with three parameters of theoverdamped process: steady state gain, time constant, and timedelay. The Cohen−Coon method aims for a closed-loopresponse with quarter decay ratio, which is viewed as toooscillatory.The iterative continuous cycling method5,6 designs a PI
controller by finding the ultimate gain and the ultimate integraltime of the controller successively. The guaranteed gain andphase margin method7 yields a PI controller such that theclosed-loop system meets the given gain and phase margins.When the first order plus time delay model is used, analytictuning rules in terms of the FOPTD model parameters areobtained. Because design purposes of both methods are notlimited to a certain ranges of time delays, both methods can bevalid for wide ranges of time delays.Many analytic tuning rules that use the FOPTD model such
as the Cohen−Coon method4 are available. Optimum PIcontroller parameters can be obtained by minimizing integralerror criteria.8 For the FOPTD models, they can be fitted byone design parameter, the ratio between time constant and time
delay. PI controller tuning relationships are available for variousintegral error criteria, for example, the integral of the absoluteerror and integral of the time-weighted absolute error.1,8 Thesetuning rules are valid for a certain ranges of time delays due tofitting.The direct synthesis method1,9 and the internal model
control method10,11 provide very simple tuning rules for theFOPTD model. The PI controller is designed for the closed-loop system to be a given transfer function with one designparameter, which is the desired closed-loop time constant.Here, the open-loop time constant is canceled by the controllerzero and consequently load performances can be very sluggish1
when the time delay is small compared to the time constant.Skogestad12 removed the drawback of the internal modelcontrol method to tune PI controllers simply by limiting theintegral time. It can be ensured by analyzing two asymptotes forsmall and large time delays that this modification will beeffective. Various PI controller tuning rules have been filed byO’Dwyer.13
Here two asymptotes of PI controllers are used to evaluateexisting tuning rules and to propose new tuning rules forFOPTD and half-order plus time delay (HOPTD) models.Tuning rules for two extreme cases of small and large timedelays compared to the time constants can be obtained easily.
Received: September 25, 2017Revised: January 12, 2018Accepted: February 12, 2018Published: February 12, 2018
Article
pubs.acs.org/IECRCite This: Ind. Eng. Chem. Res. 2018, 57, 2905−2916
© 2018 American Chemical Society 2905 DOI: 10.1021/acs.iecr.7b03966Ind. Eng. Chem. Res. 2018, 57, 2905−2916

By matching these two tuning rules, simple tuning rules areobtained here. As shown in Lee et al.,14 the FOPTD model canhave difficulty even for some overdamped processes. Toovercome such drawbacks of the FOPTD model-based method,the half-order plus time delay (HOPTD) model-basedmethod14 is suggested. The HOPTD model-based method totune PI controllers seems to be applicable to almost alloverdamped processes robustly. Here, a simple tuning rule forthe HOPTD model is also suggested.
2. MOTIVATION AND TWO ASYMPTOTES OF PICONTROLLER TUNING RULES
Consider the FOPTD model
θτ
=−+
G s ks
s( )
exp( )1 (1)
Here k, τ, and θ are the process steady state gain, time constant,and time delay, respectively. Based on this model, theproportional integral (PI) controller
τ= + = +
⎛⎝⎜
⎞⎠⎟C s k
sk k
s( ) 1
1 1c
Ic I
(2)
is designed. There are many PI controller tuning rules that canbe applied to FOPTD processes of eq 1.1,2,8,13 Some rules arelimited applications and some are wider applications.One of the simplest PI controller tuning rules is10,11
τλ θ
τ τ
=+
=
kk( )c
I (3)
which can be derived by the direct synthesis method1 or theinternal model control method10 with the 1/0 Padeapproximation of time delay. Here λ is the design parameterrepresenting the closed-loop time constant and its default valueis θ. For a large time delay compared to the time constant, itsclosed-loop performances are excellent. However, as the timedelay decreases, its load performances become worse.1,2
Skogestad12 has removed this drawback simply by limitingthe integral time as
τ τ λ θ= +min( , 4( ))I (4)
The closed-loop performances for a small θ are improvedconsiderably. This simple modification of eq 4 provides twoasymptotes of τI = τ for a large θ and τI = 4(λ + θ) for a small θ.
Here these two asymptotes are studied to evaluate and designPI controller tuning rules.When θ≫ τ, PI controller should be designed for the closed-
loop responses to be slow. Hence the process can beapproximated as
θ θ≈ − = − =G s k s k s s s( ) exp( ) exp( ), (5)
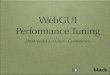
Tuning rules for this process are given in Table 1, and someclosed-loop performances are shown in Figure 1. All tuningrules in Table 1 for the process of eq 5 are acceptable.
When θ ≪ τ, PI controller can be designed for the closed-loop responses to be fast. Hence the working frequencies arehigh and the process can be approximated as
θτ
θτ
≈−
= −
=G s ks
sk
ss
kk
( )exp( ) exp( )
,(6)
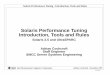
Tuning rules for this process are given in Table 1, and someclosed-loop performances are shown in Figure 2. Except for theZiegler−Nichols open-loop method, all tuning rules in Table 1for the process of eq 6 are acceptable. Here a set-point filter toreduce the overshoot for step set-point changes will berequired.
Table 1. PI Controller Tuning Rules for Pure Delay and Integral Plus Time Delay Processes
process method13 kc τI kI design parameter
θ− sexp( ) Astrom−Hagglund 0.195 0.284θ 0.69/θ ζ0 = 0.707
0.135 0.25θ 0.54/θ ζ0 = 1.0Hansen 0.2 0.3θ 0.67/θdirect synthesis 0.125 0.25θ 0.5/θ τ = 0, λ = θ
SIMC12 0 0 0.5/θ τ = 0, λ = θ
θ− ss
exp( )Ziegler−Nichols 0.9/θ 3θ 0.3/θ2 open-loop method
Tyreus−Luyben 0.487/θ 8.75θ 0.056/θ2
Astrom−Hagglund 0.35/θ 7θ 0.050/θ2
Chien−Fruehauf 0.556/θ 5θ 0.111/θ2 λ = 2θO’Dwyer 0.357/θ 4.3θ 0.083/θ2 Am = 4, ϕm = 60°Cheng−Yu 0.524/θ 8θ 0.066/θ2 Am = 2.83, ϕm = 46.1°SIMC12 0.5/θ 8θ 0.063/θ2
Figure 1. Closed-loop responses of PI controllers for the pure delayprocess, Gp(s) = exp(−s).
Industrial & Engineering Chemistry Research Article
DOI: 10.1021/acs.iecr.7b03966Ind. Eng. Chem. Res. 2018, 57, 2905−2916
2906

Tuning rules in Table 1 are the desired two asymptotes forsmall and large time delays over the time constants. Here thesetwo asymptotes are used to evaluate existing tuning rules and topropose new tuning rules by matching them.
3. ASYMPTOTE COMPARISONS3.1. Ziegler−Nichols (Closed Loop).3 From the ultimate
gain ku and the ultimate period pu, Ziegler−Nichols3 proposedthe tuning rule of kc = 0.45ku and τI = pu/1.2. Now it is one ofthe base tuning rules for comparisons.The ultimate gain and period for G(s) of eq 5 are
θ
=
=
k k
p
1/
2u
u (7)
and for G(s) of eq 6 are
π πτθ
θ
= =
=
kk k
p2 24
u
u (8)
Hence two asymptotes for the Ziegler−Nichols method3 areas shown in Table 2. Considering tuning rules in Table 1, τI forθ ≫ τ is too high and closed-loop responses will be sluggish fordelay-dominant processes. On the other hand, τI for θ ≪ τ issomewhat small and closed-loop responses will be oscillatoryfor lag-dominant processes. These are well-known drawbacks ofthe Ziegler−Nichols method.2,15 The Ziegler−Nichols methodshould be used for the moderate range of the time delayscompared to the time constants.3.2. Cohen−Coon.4 The tuning rule for the Cohen−Coon
method4 is
θτ θ
τ θ τ θτ θ
= +
= ++
⎜ ⎟⎛⎝
⎞⎠kk
10.9
12
30 39 20
c
I (9)
The two asymptotes for this tuning rule are given in Table 2.Considering tuning rules in Table 1, the controller integral timeτI’s for both asymptotes are somewhat low. Hence closed-loopresponses will be oscillatory for both delay- and lag-dominant
processes. Actually the Cohen−Coon method will provide PIcontrollers that meet the design concept of quarter decay ratio,which is viewed as too oscillatory.
3.3. ITAE.1 PI controllers that minimize some error criteriacan be designed. The integral of time-multiplied absolute errors(ITAE) method is popular due to its conservative perform-ances.1 The tuning rule for the set-point change is
θ τ τθ
τ τθ τ
= ≈
=−
−kk 0.586( / ) 0.586
1.030 0.165 /
c0.916
I(10)
Considering tuning rules in Table 1, for a small θ, this tuningrule can be too sluggish due to too-large τI. For a large θ, itcannot be used due to negative τI.The tuning rule for the load change is
θ τ τθ
τ τθ τ
= ≈
=
−
−
kk 0.859( / ) 0.859
0.674( / )
c0.977
I 0.680(11)
It shows quite different asymptotes compared to those inTable 1 and cannot be used for both small and large θ’s.Drawbacks of these tuning rules are due to the fittinglimitations of simpler equations of eqs 10 and 11.
3.4. Iterative Continuous Cycling.5,6 The characteristicequation for the PI control system stability is
θτ
+ +−
+=
⎛⎝⎜
⎞⎠⎟k
ks
k ss
1exp( )
10c
I
(12)
The iterative continuous cycling method designs kc first with kI= 0. Find the ultimate gain kcu and let
ξ=k k /c cu (13)
Then, under kc, find the ultimate integral gain kIu and let
ξ=k k /I Iu (14)
The gain margin ξ can be different for kc and kI.With the 1/0 Pade approximation of exp(−θs) = −θs + 1, the
analytic tuning rule can be obtained as
τξθ
ξθτ
ξ θ
=
= +
kk
kk1
c
I 2 2(15)
For the 1/1 Pade approximation of exp(−θs) = (−θs/2 + 1)/(θs/2 + 1), the analytic tuning rule can be obtained as (ξ = 4 isused)
τθ
τ θ τ θθ τ θ
= +
= + ++
kk
kk
20.25
3(2 )(2 5 )8 (14 3 )
c
I 2(16)
For the tuning rule of eq 15, with a constant gain margin ξ, itis impossible for both asymptotes to be similar to those inTable 1. The gain margin of ξ = 2 for delay-dominant processesand ξ = 4 for lag-dominant processes will be useful. The tuningrule of eq 16 has both asymptotes similar to those in Table 1. Itcan be used for the whole range of time delays.
Figure 2. Closed-loop responses of PI controllers for the integral plustime delay process, Gp(s) = exp(−s)/s.
Industrial & Engineering Chemistry Research Article
DOI: 10.1021/acs.iecr.7b03966Ind. Eng. Chem. Res. 2018, 57, 2905−2916
2907

3.5. Guaranteed Gain and Phase Margins.7 Ho et al.7
proposed PI controller tuning rules based on the given gain andphase margins. They obtained analytic rules with a linearapproximation of arctangent function in phase computations as
ω τ
τ ω θπ
ωτ
ωϕ π
θ
=
= − +
=+ −
−
−⎜ ⎟⎛⎝
⎞⎠
kkA
A A A
A
4 1
0.5 ( 1)
( 1)
cp
m
I p p2
1
pm m m m
m2
(17)
Here Am and ϕm are the design parameters of gain and phasemargins, respectively. Typical tuning rules are given in Table 2.
Two asymptotes are very similar to those in Table 1, andexcellent closed-loop performances regardless of time delayswill be obtained.
3.6. Direct Synthesis with Taylor Series Matching.9
The close- loop transfer function for the process of eq 1 withthe controller of eq 2 is
=+
G sG s C s
G s C s( )
( ) ( )1 ( ) ( )cl
(18)
With specifying the closed-loop transfer function as
θλ
=−+
G ss
s( )
exp( )1cl (19)
the controller C(s) can be obtained as
Table 2. Asymptotes of Various PI Controller Tuning Rules for FOPTD Processes, = θτ
−+G s( ) k s
spexp( )
1
asymptotes
θ/τ → ∞ θ/τ → 0
method tuning rules kkc τI (kkI) kkc τI design parameter
Ziegler−Nichols (closed loop)3 kc = 0.45ku 0.45 1.67θ (0.27/θ) 0.71τ/θ 3.33θτI = pu/1.2
Cohen−Coon4 eq 9 0.083 0.15θ (0.55/θ) 0.9τ/θ 3.33θITAE1 eq 10 ∼0.6τ/θ negative ∼0.6τ/θ ∼τ set point
iterative continuous cycling5τ
ξθ=kkc τ/ξθ τ (1/ξθ) τ/ξθ ξθ e−θs ≈ −θs + 1
τξθ τ
= +−⎛
⎝⎜⎞⎠⎟
1 1I
1
τθ
= +kk2
0.25c 0.25 0.4θ (0.63/θ) 0.5τ/θ 4.67θθ
θ≈ − +
+θ− s
se
/2 1/2 1
s
τ θ τ θτ θ
= ++
28 66 15I ξ = 4
guaranteed gain and phase margins7τ
θ=kk
2.04c 0.49τ/θ τ (0.49/θ) 0.49τ/θ 5.43θ Am = 3
τθ τ
= +−
⎜ ⎟⎛⎝
⎞⎠
15.43
1I
1
ϕm = π/4 (45°)
τθ
=kk1.99c 0.52τ/θ τ (0.50/θ) 0.52τ/θ 7.97θ Am = 3
τθ τ
= +−
⎜ ⎟⎛⎝
⎞⎠
17.97
1I
1
ϕm = π/3.6 (50°)
direct synthesis with Taylor series matching9τθ
= +kk2
18c 0.125 0.25θ (0.5/θ) 0.5τ/θ τ λ = θ
τ τ θ= + 0.25I
Skogestad internal model control12,15τ
λ θ=
+kkc 0.5τ/θ τ (0.5/θ) 0.5τ/θ 8θ λ = θ
τ τ λ θ= +min( , 4( ))I
τ
λ θ=
+
+
θ
kkc3 0.167 0.33θ (0.5/θ) 0.5τ/θ 8θ λ = θa
τ τ θ λ θ= + +⎜ ⎟⎛⎝
⎞⎠min
3, 4( )I
AMIGO16 eq 22 0.15 0.3θ (0.5/θ) 0.35τ/θ 7θτθ
= +kk 0.14 0.28c 0.14 0.33θ (0.42/θ) 0.28τ/θ 7.13θ pure FOPTD process
τ θ τθθ τ
= ++
0.336.8
10I
aModified by Grimholt and Skogestad.15
Industrial & Engineering Chemistry Research Article
DOI: 10.1021/acs.iecr.7b03966Ind. Eng. Chem. Res. 2018, 57, 2905−2916
2908

τλ θ
=−
= ++ − −
−C s G sG s
G ss
k s s( ) ( )
( )1 ( )
1 11 exp( )p
1 cl
cl(20)
Various tuning rules according to approximations of the timedelay exp(−θs) can be obtained. For example, with the 1/0Pade approximation of exp(−θs) = −θs + 1, the tuning rule ofeq 3 is derived.With truncating the Taylor series of eq 20, Lee et al.9
obtained a PI controller tuning rule
τλ θ
θλ θ
τ τ θλ θ
=+
++
= ++
kk2( )
2( )
c
2
2
I
2
(21)
Its asymptotes are shown in Table 2 (λ = θ is used). Theasymptotes for θ ≫ τ are similar to those in Table 1. On theother hand, the asymptotes for θ ≪ τ are quite different fromthose in Table 1. Actually, when θ ≪ τ, the load responses arevery sluggish and some modifications should be applied, forexample, introducing the integral process approximation as inSeborg et al.1 Other tuning rules based on the direct synthesismethod and internal model control method also suffer fromthis drawback.3.7. Skogestad Internal Model Control (SIMC).12
Skogestad12 has removed the drawback of the direct synthesismethod and the internal model control method simply bylimiting the integral time as in eq 4. This simple modificationprovides two asymptotes of τI = τ for a large θ and τI = 4(λ + θ)for a small θ as in Table 2, which are very similar to those inTable 1. Excellent closed-loop performances are obtained forthe whole range of time delays. Grimholt and Skogestad15
proposed a tuning rule slightly improved for a large delay.3.8. AMIGO.16 Hagglund and Astrom16 proposed tuning
rules based on the Ms-constrained integral gain optimization(MIGO). They maximize the integral gain kc under theconstraint of peak amplitude ratio of sensitivity function (Ms).One of the approximate explicit tuning rules (AMIGO) is givenas
τ θ θ τ
τ θ τ θ τ
τ θ τ θ
τ
θ θ τ
θ τ θ τ
θ τ τ θ
=− <
< <+ <
=<
< <+ <
⎧⎨⎪
⎩⎪
⎧⎨⎪
⎩⎪
kk
0.35 / 0.6, /6
0.25 / , /6
0.1 / 0.15,
7 , 0.11
0.8 , 0.11
0.3 0.5 ,
c
I
(22)
For FOPTD processes, the tuning rule is further simplified asshown in Table 2. Its two asymptotes are similar to those inTable 1, showing that the tuning rule can be used for the wholerange of delays. Tuning rules for PID controllers based on thisconcept17 are also available.
4. NEW TUNING RULE FOR THE FIRST ORDER PLUSTIME DELAY (FOPTD) MODEL
The SIMC rule can be interpreted as (the default designparameter of λ = θ is used)
τ τ θτ θ
= ≈ +−⎛
⎝⎜⎞⎠⎟min( , 8 )
1 1(8 )p p
p
I
1/
(23)
When p goes to infinity, the approximation of eq 23 is exact.18
For p ≈ 8, both terms are nearly the same. The approximationof eq 23 can be interpreted as the matching of two asymptotesof τI = τ and τI = 8θ. By adjusting p, the bad effect of switchingnear τ = 8θ may also be mitigated. When p = 1, the structure ofeq 23 is equivalent to those of the guaranteed gain and phasemargins method as in Table 2. Utilizing this matchingtechnique, a new tuning rule is developed.Here a two degree of freedom (2DOF) controller1,2 as in
Figure 3 is considered. The usual PI controller cannot
guarantee closed-loop performances for both set-point changeand load change in the input. Especially, for lag-dominantprocesses, closed-loop performances for the set-point changesare quite different from those for the load changes in the input.For delay-dominant processes (θ ≫ τ), a tuning rule based
on the internal model control method is effective and usedhere. The set-point filter is not required. The tuning rule is
τθ
τ ττ τ
=
==
kk2c
I
sp
(24)
For lag-dominant processes (θ≪ τ), a new tuning rule basedon the dominant pole method2 is considered:
τθ
τ θ
τ θ
=
=
=
kk2
4.31
1.72
c
I
sp
(25)
It is derived by specifying that a pole of closed-loop system is ats = −α(1 + j). The PI controller parameters are calculatedfrom2
θτ
+ +−
=α=− +
⎛⎝⎜
⎞⎠⎟k
ks
k ss
1exp( )
0s j
cI
(1 ) (26)
The pole location α is selected to be 1/(2.428θ) so that theproportional gain is kkc = τ/(2θ). The zero time constant τsp ofthe set-point filter is set to be 1/|−α(1 + j)|, which is similar tothat suggested in Astrom and Hagglund.2
Tuning rules of eqs 24 and 25 are combined as
Figure 3. Equivalent 2DOF (two degree of freedom) PI controlsystems (τF = bτI).
Industrial & Engineering Chemistry Research Article
DOI: 10.1021/acs.iecr.7b03966Ind. Eng. Chem. Res. 2018, 57, 2905−2916
2909

τθ
ττ θ
τ
ττ θ
τ
=
= + =+
= + =+
τθ
τθ
−
−
⎛⎝⎜
⎞⎠⎟
⎛⎝⎜
⎞⎠⎟
( )
( )
kk2
1 1(4.31 )
1
1
1 1(1.72 )
1
1
c
I 2 2
1/2
4.31
2
sp 2 2
1/2
1.72
2
(27)
Here, based on simulation results, p = 2 for the matching of twoasymptotes is selected. The tuning rule of eq 27 has asymptotesof eqs 24 and 25, which are similar to those in Table 1, and canbe used for the whole range of time delays.Figure 4 shows closed-loop responses for load changes in the
process input and step set-point changes. Responses are
compared with the modified SIMC tuning rule.15 For θ =0.1, the proposed tuning rule shows excellent load and set-pointresponse, compared to the modified SIMC tuning. Themodified SIMC method shows load response sluggish a little.It is due to a large integral time of τI = 8θ. However, its choicewill be inevitable for the low overshoot in the set-pointresponse. With the 2DOF controller, this can be avoided andhere low integral time near τI = 4.31θ is used without worryingabout overshoots. The sluggish load response is relieved andovershoot in the set-point response is suppressed by the set-point filter. For θ = 1 and θ = 5, the proposed tuning ruleshows closed-loop responses with a similar shape. The modifiedSIMC tuning rule shows slow drifts due to the increasedintegral time. However, such drift may not be a severedisadvantage.Figure 5 shows several quantitative properties of the
proposed tuning rule compared to the modified SIMC tuning.Both tuning rules have similar peak amplitude ratios (Ms) near1.7, showing their robustness. The values of the integral ofabsolute errors (IAE) of the proposed tuning rule are higher byabout 10% for a large time delay θ. For a small time delay θ,those are increased for the set-point changes and decreased for
the load changes. Increments for the set-point changes are dueto the set-point filters used in the proposed control system.However, the set-point filters will be inevitable to suppressovershoots in the set-point responses. Except for a very smalltime delay θ, overshoots in the set-point responses are wellbelow 10% for both tuning rules.
5. NEW TUNING RULE FOR THE HALF-ORDER PLUSTIME DELAY (HOPTD) MODEL
As shown in Lee et al.,14 the FOPTD model can have troubleeven for some overdamped processes. To overcome suchdrawbacks of the FOPTD model-based method, the half-orderplus time delay (HOPTD) model-based method can be used.The HOPTD model-based method to tune PI controllers canbe applied to almost all overdamped processes robustly.Consider the HOPTD model14
θτ
=−
+G s
k ss
( )exp( )
1 (28)
When θ≫ τ, PI controller should be designed for the closed-loop responses to be slow. Because the Pade approximation forthe half-order term can be applied, the process becomes
θτ
θ=
−+
≈−
+τG sk s
sk s
s( )
exp( )1
exp( )1
2 (29)
Applying the SIMC method,12 we have
τθ
τ τ
=
=
kk4
2
c
I (30)
When θ ≪ τ, PI controller can be designed for the closed-loop responses to be fast. Hence the working frequencies arehigh and the process can be approximated as
Figure 4. Closed-loop responses of PI controllers for FOPTDprocesses, Gp(s) = exp(−θs)/(s + 1).
Figure 5. Ms (peak amplitude ratios of the sensitivity function, S(s) =1/(1 + G(s) C(s))), relative IAE (integral of absolute errors of theproposed FOPTD method over the modified SIMC method15), andpeak values in the unit set-point responses for FOPTD processes,Gp(s) = exp(−θs)/(s + 1).
Industrial & Engineering Chemistry Research Article
DOI: 10.1021/acs.iecr.7b03966Ind. Eng. Chem. Res. 2018, 57, 2905−2916
2910

θτ
θτ
θ
τ
=−
+≈
−= −
=
G sk s
sk s
sk
ss
kk
( )exp( )
1exp( ) exp( )
,
(31)
For this lag-dominant model (θ ≪ τ), the dominant polemethod2 as in the above FOPTD model is applied and a tuningrule is obtained as
τθ
τ θ
=
=
kk 0.4619
1.408
c
I (32)
This tuning rule satisfies2
θτ
+ +−
=α=− +
⎛⎝⎜
⎞⎠⎟k
ks
k ss
1exp( )
0s j
cI
(1 ) (33)
One of the closed-loop poles is at s = −α(1 + j). Here α is setto 1/(3θ).Tuning rules of eqs 30 and 32 are combined as
θτ
θτ
τθ
ττ θ
τ
= + =+
= + =+
τθ
τθ
−
−
⎜ ⎟
⎜ ⎟
⎜ ⎟
⎛⎝⎜⎜⎛⎝
⎞⎠
⎛⎝⎜
⎞⎠⎟
⎞⎠⎟⎟
⎛⎝⎜⎛⎝
⎞⎠
⎛⎝
⎞⎠
⎞⎠⎟ ( )
kk4 1
0.4619 41
1
2 11.408 2
1
1
c
2 2 1/2
3.41
I
2 2 1/2
2.82
2
(34)
Figure 6 shows simulation results. The proposed tuning ruleof eq 34 is compared to that in Lee et al.14 Both closed-loop
performances are similar. However, the proposed tuning rule isfar simpler. Table 3 shows the proposed tuning rules forFOPTD and HOPTD models.
6. MODIFIED SIMC MODEL REDUCTION METHODProcesses can often show high order dynamics. When simplegraphical identifications are applied, the FOPTD and HOPTDmodels are obtained and the proposed tuning rules can beapplied directly. On the other hand, when elaborateidentification methods are applied, process models obtained
will be high order. To apply the proposed tuning methods, theirorders should be reduced. The SIMC model reduction13 is oneof the simplest model reduction methods and will be useful forPI controller tuning. Here the SIMC model reduction methodis slightly modified for better performances.19 Consider a highorder process model of
τ ττ τ
θ=+ ··· ++ ··· +
− >G s ks ss s
s n m( )( 1) ( 1)( 1) ( 1)
exp( ),m
n
z1 z
p1 p
(35)
6.1. FOPTD Model. The FOPTD consists of six steps.Step 1. Assume the effective time delay θ that will be near
the time delay of the reduced FOPTD model.12
Step 2. Add all zero time constants with negative τz to thetime delay.Step 3. Apply the half-rule of SIMC sequentially from the
smallest time constant τp (when τz < τp, skip this step and dothe following step first). For example
+=
+ + +
≈−
+ +=
−+ + +
≈−
+ +≈
−+
s s s ss
s ss
s s ss
s ss
s
1( 1)
1( 1) ( 1)( 1)
exp( 0.5 )( 1) (1.5 1)
exp( 0.5 )(1.5 1)( 1)( 1)
exp( )(1.5 1)(1.5 1)
exp( 1.75 )2.25 1
4 2
2
(36)
Step 4. For all pairs of nearest poles and zeros of (τzs + 1)/(τps + 1), calculate
τ θ
τ θτ τ
τ τ θ
τ θ
=
+
+ ≥
+
+
⎧
⎨⎪⎪⎪
⎩⎪⎪⎪
q
1 ( / )
1 ( / ),
1 /(2 )
1 /(2 ), otherwise
z2
p2 z p
z p2
z2 2
(37)
Here θ is the assumed effective time delay in the final FOPTDmodel.Step 5. Apply the model reduction for the pair with the
smallest q as
ττ
τ τ++
=
≥
+τ τ
τ τ θ
−
+
⎧⎨⎪⎪
⎩⎪⎪
ss
q
q s
11
,
1 11
, otherwisez
p
z p
1 / (2 )p z
z p2
(38)
Step 6. Repeat steps 2−5 until the FOPTD model isobtained.
6.2. HOPTD Model. When the process has a large zeroterm, the above FOPTD model can provide poor tuningresults. For such processes, the HOPTD model is considered.The 1/2 Pade approximation of the half-order process14 is
τ +≈
+
+ +
τ
τ τ− +( )( )s
s
s s
11
1
1 12
4 2 2 4 2 2 (39)
Using this relationship, the HOPTD model is obtained asfollows.Step 1. Applying the above model reduction technique for
the FOPTD model, obtain
Figure 6. Closed-loop responses of PI controllers for HOPTD
processes, = θ−+G s( ) s
spexp( )
1.
Industrial & Engineering Chemistry Research Article
DOI: 10.1021/acs.iecr.7b03966Ind. Eng. Chem. Res. 2018, 57, 2905−2916
2911

τ θτ τ
τ τ τ=+ −+ +
> >G s ks ss s
( )( 1) exp( )( 1)( 1)
,2z1
p1 p2p1 z1 p2
(40)
Step 2. Apply the Pade approximation of eq 39 with
τ τ= −(4 2 2 ) p1 (41)
Then
τ
τ θτ τ τ
τ
τθ
≈+
+ +
+
+ −+ +
=+
++
+
+−
τ τ
τ
τ
τ
− +
+
( )( )G s k
s
s s
s
s ss s
ks
ss
s
ss
( )1
1
1 1
1
( 1) exp( )( 1)( 1)
11
11
1
1exp( )
24 2 2 4 2 2
2
z1
p1 p2
z1
2
4 2 2
p2 (42)
Step 3. Apply the above model reduction technique to thepole−zero pairs and obtain
τ τθ≈
+
+− G s
sk
ss( )
11 1
exp( )2(43)
Step 4. Adjust the pole and time delay in eq 43 by applyingthe half-rule of SIMC
τ τθ τ≈
+ +− + G s
ks
s( )( ) 1
exp( ( /2) )2(44)
The HOPTD model is used to complement the FOPTDmodel. When the time delay of the final FOPTD model,θFOPTD, is much different from the time delay θ of the processmodel eq 40 as
θ θ> 1.1FOPTD (45)
processes will not be approximated well by the FOPTD modeland the HOPTD model is tried.
7. APPLICATIONS7.1. Process 1. Consider the process
= + − ++ +
G ss s
s s( )
(6 1)( 2 1)(10 1)( 1)2 (46)
From two points that the open-loop step response reaches28.3 and 63.2% of the new steady state, FOPTD and HOPTDmodels can be obtained.14 This simple graphical identificationmethod gives two models of
=−
+G s
ss
( )exp( 1.594 )
4.11 1FOPTD (47)
=−
+G s
ss
( )exp( 2.43 )
8.08 1HOPTD(48)
Because the effective time delay for the FOPTD model is toosmall, PI controller tuning based on this graphical FOPTDmodel shows oscillatory closed-loop responses and is notconsidered for comparisons.When the exact process model of eq 46 is available, model
reduction techniques can be applied to obtain FOPTD andHOPTD models. The SIMC method provides the approximateFOPTD model of
≈−
+ +≈
−+
G ss
s ss
s( )
exp( 2 )(4 1)( 1)
exp( 3.5 )4.5 1SIMC 2
(49)
When the proposed model reduction technique is applied, wehave
≈ ++
−+
≈+
+
+−
+=
+−
+
≈+
−
··
·
−+ ·
·
G sss
ss
s
ss s
ss
ss
( )6 1
10 1exp( 2.5 )
1.5 1
1
1
11
exp( 2.5 )1.5 1
0.7181.18 1
exp( 2.5 )1.5 1
0.7182.09 1
exp( 3.09 )
FOPTD
6(2 2.5)
6 10(2 2.5)
10 61
2
2
2
6 10
(2 2.5)2
(50)
Table 3. Proposed Tuning Rules
asymptotes
θ/τ → ∞ θ/τ → 0
process PI controller kkc τI (kkI) kkc τI
θτ
−+
k ss
exp( )1
τθ
=kk2c 0.5τ/θ τ (0.5/θ) 0.5τ/θ 4.31θ
τ τ=+ τ
θ( )1
1I
4.31
2
τ τ=+ τ
θ( )1
1sp
1.72
2
θτ
−+
k ss
exp( )1
τθ
=+ τ
θ
kk4
1
1c
3.410.25τ/θ 0.5τ (0.5/θ) τ θ0.46 / 1.41θ
τ τ=+ τ
θ( )21
1I
2.82
2
Industrial & Engineering Chemistry Research Article
DOI: 10.1021/acs.iecr.7b03966Ind. Eng. Chem. Res. 2018, 57, 2905−2916
2912

≈ ++
−+
≈+
++
++
− ≈+
+
+
+
+−
=+
−
( )( )
( )( )
G sss
ss s
ss
ss
ss
s
ss
( )6 1
10 1exp( 2.5 )
1.5 11
11.7 16 1
5.86 11.72 11.5 1
exp( 2.5 )1
11.7 1
1
1
1
1exp( 2.5 )
1.0611.7 1
exp( 2.5 )
HOPTD
62.5
2
5.862.5
2
1.722.5
2
1.52.5
2
(51)
Tuning rules are applied to approximate models. Table 4shows final tuning results. Figure 7 shows closed-loopperformances of PI controllers. The proposed tunings basedon HOPTD models that are obtained by the graphicalidentification and the model reduction show better closed-loop responses compared to other tunings.7.2. Process 2 (Ogunnaike and Ray Column20).
Consider the process which is the last diagonal element ofthe Ogunnaike and Ray column.20 Here the time delay isincreased by 2.
=+ −
+ +G s
s ss s
( )(11.61 1) exp( 3 )(18.8 1)(3.89 1)p
(52)
From two points that the open-loop step response reaches28.3 and 63.2% of the new steady state, FOPTD and HOPTD
models can be obtained.14 This simple graphical identification
method gives two models of
Table 4. Tuning Results
process method kc τI (kI) τF gain margin phase margin (deg) Msa
exp(−s) Astrom−Hagglund 0.195 0.284 2.6 61 1.7direct synthesis 0.125 0.25 3.7 68 1.4SIMC 0 (0.5) 3.2 61 1.6
−ss
exp( )Ziegler−Nichols 0.9 3 1.4 16 4.5
Chien−Fruehauf 0.556 5 2.6 38 2.0SIMC 0.5 8 3.0 47 1.7
θ−+
ss
exp( )1
θ = 0.1 modified SIMC15 5 0.8 3.1 58 1.6
θ = 0.1 proposed FOPTD 5 0.3958 0.1692 2.9 44 1.8θ = 1 modified SIMC15 0.6667 1.3333 2.7 66 1.7θ = 1 proposed FOPTD 0.5 0.9741 0.8641 3.1 60 1.6θ = 5 modified SIMC15 0.2667 2.6667 3.0 70 1.5θ = 5 proposed FOPTD 0.1 0.9989 0.9933 3.1 60 1.6
θ−+
ss
exp( )1
θ = 0.1 Lee et al.14 1.6244 0.2021 2.8 67 1.6
θ = 0.1 proposed HOPTD 1.2611 0.1356 3.4 56 1.5θ = 1 Lee et al. 0.5481 1.1817 2.7 78 1.6θ = 1 proposed HOPTD 0.2199 0.4712 4.1 64 1.4
+ − ++ +
s ss s
(6 1)( 2 1)(10 1)( 1)2 modified SIMC15 0.8095 5.6667 1.9 82 2.1
proposed FOPTD 0.3382 2.0647 0.9864 3.9 61 1.4proposed HOPTD 0.7168 3.0170 2.0 63 2.0HOPTD (graphical ID) 0.5911 2.6127 2.4 61 1.8
+ −+ +s s
s s(11.61 1) exp( 3 )(18.8 1)(3.89 1)
modified SIMC15 1.0990 10.790 3.6 86 1.4
proposed FOPTD 0.9327 4.2249 3.5537 3.5 56 1.5proposed HOPTD 0.9966 4.2291 3.3 55 1.6HOPTD (graphical ID) 0.7326 4.8430 4.7 64 1.3
aPeak amplitude ratio of the sensitivity function, S(s) = 1/(1 + G(s) C(s)).
Figure 7. Closed-loop responses of PI controllers for the example
processes, = + − ++ +
G s( ) s ss s
(6 1)( 2 1)(10 1)( 1)2 . The modified SIMC method15 is
based on the original model reduction rules of Skogestad.12
Industrial & Engineering Chemistry Research Article
DOI: 10.1021/acs.iecr.7b03966Ind. Eng. Chem. Res. 2018, 57, 2905−2916
2913

=−
+G s
ss
( )exp( 2.20 )
9.23 1FOPTD (53)
=−
+G s
ss
( )exp( 4.07 )
18.1 1HOPTD (54)
Because the effective time delay for the FOPTD model is lessthan the actual time delay, PI controller tunings based on thisgraphical FOPTD model show oscillatory closed-loopresponses and are not considered for comparisons.When the exact process model of eq 52 is available, model
reduction techniques can be applied to obtain FOPTD andHOPTD models. The SIMC method provides the approximateFOPTD model of
≈−
+ +≈
−+
G ss
s ss
s( )
exp( 3 )(7.19 1)(3.89 1)
exp( 4.95 )9.14 1SIMC
(55)
When the proposed model reduction technique is applied, wehave
≈+
+ +−+
≈+
−
··
· + ··
G ss
ss
ss
( )1
11
1
exp( 3 )3.89 1
0.6724.40 1
exp( 3.51 )
FOPTD
11.61(2 3)
11.61 18.8(2 3)
7.191
2
2
2 11.61 18.8
(2 3)2
(56)
≈+
++
++
−
≈+
+
+
+
+
+−
=+
· ·+
−
≈+
−
···
−+ ·
·
( )( )
G s
sss
ss
s
s
ss
s ss
ss
( )1
22.0 111.61 111.02 1
3.23 13.89 1
exp( 3 )
122.0 1
1
1
1
1
11
exp( 3 )
122.0 1
1.050.956
0.489 1exp( 3 )
1.0022.5 1
exp( 3.24 )
HOPTD
11.613
2
11.023
2
3.23(2 3)
3.23 3.89(2 3)
3.89 3.231
2
2
2
3.23 3.89
(2 3)2
(57)
Tuning rules are applied to these approximate models. Table4 shows final tuning results. Figure 8 shows closed-loopperformances of PI controllers. The proposed tunings based onFOPTD and HOPTD models that are obtained by the modelreduction show better closed-loop responses compared to othertunings.
8. CONCLUSIONTwo extreme cases of the first order plus time delay (FOPTD)model for small and large time delays over the time constantare the integral plus time delay model and the pure time delaymodel, respectively. Tuning rules for PI controllers are availablefor such cases, and tuning rules for the FOPTD models needapproach them as the time delay varies. These two asymptotesof PI controller tuning rules are easily calculated and can beused to evaluate the performances and application ranges of PIcontroller tuning rules, providing guidelines for the selection ofPI controller tuning rules. When design parameters are selected
appropriately, the iterative continuous cycling method, theguaranteed gain and phase margin method, and the Skogestadinternal model control method are found to be applied for thewhole range of time delays.By matching two asymptotes for small and large time delays
over the time constant, a simple analytic tuning rule for theFOPTD model has been proposed. For some overdampedprocesses whose transfer functions have large zero terms, thehalf-order plus time delay (HOPTD) models are found to bebetter than the FOPTD models. Applying the technique ofmatching two asymptotes, a simple analytic PI controller tuningrule has also been proposed for the HOPTD models. To applythese tuning rules to high order processes whose transferfunctions are given, model reduction methods to obtain theFOPTD and HOPTD models are investigated. Here, the SIMCmodel reduction rule is modified and some ambiguities inpractical applications are removed. Simulation results forempirical and full models of processes are given to show theperformances of the proposed model reduction methods andtuning rules.
■ APPENDIX: DOMINANT POLE TUNING2
The closed-loop poles for the process G(s) and PI controllerC(s) = kc + kI/s are roots of the characteristic equation
+ + =⎛⎝⎜
⎞⎠⎟k
ks
G s1 ( ) 0cI
(A1)
When a pair of closed-loop poles is specified, PI controllerparameters can be determined. These poles can be dominant.For the FOPTD model of eq 1, with the dominant pole
candidates of s = −α(1 + j), we have
θτ
+ +−
=α=− +
⎛⎝⎜
⎞⎠⎟k
ks
k ss
1exp( )
0s j
cI
(1 ) (A2)
Then
Figure 8. Closed-loop responses of PI controllers for HOPTD
processes, = + −+ +G s( ) s s
s s(11.61 1) exp( 3 )(18.8 1)(3.89 1)
. The modified SIMC method15 is
based on the original model reduction rules of Skogestad.12
Industrial & Engineering Chemistry Research Article
DOI: 10.1021/acs.iecr.7b03966Ind. Eng. Chem. Res. 2018, 57, 2905−2916
2914

α τα θα
τα θα θαθα
τα θα θατα θα θα
− + + = − + − +
= − − −
= − −− −
kk j kk j j
j j
j
(1 ) (1 ) exp( (1 ))
2 exp( )(cos( )sin( ))
2 exp( ) sin( )2 exp( ) cos( )
c I2 2
2
2
2
(A3)
Equating real and imaginary parts of both sides, we have
α τα θα θα
α τα θα θα
− + = − −
− = − −
kk kk
kk
2 exp( ) sin( )
2 exp( ) cos( )
c I2
c2
(A4)
Hence
τα θα θα
τα θα θα τα θαθα
τα θα θα θα
= −
= − − + −
= − − +
kk
kk
2 exp( ) cos( )
2 exp( ) sin( ) 2 exp( )cos( )
2 exp( )( sin( ) cos( ))
c
I2 2
2
(A5)
With the choice of α = 1/(2.428θ), kkc = 0.5τ/θ and kkI =
0.116τ/θ2 (τI = kc/kI = 4.31θ).
For the FOPTD model of eq 28, with the dominant pole
candidates of s = −α(1 + j), we have
θτ
+ +−
=α=− +
⎛⎝⎜
⎞⎠⎟k
ks
k ss
1exp( )
0s j
cI
(1 ) (A6)
Then
α
τ α θα
− + +
= − − − − +
kk j kk
j j
(1 )
( 1 ) exp( (1 ))c I
3/2 3/2(A7)
Equating real and imaginary parts of both sides, we have
α τ αθα
α τ α θα
− + = − − −− +
− = − − − − +
kk kk jj
kk j j
Re(( 1 )exp( (1 )))
Im(( 1 ) exp( (1 )))
c I3/2 3/2
c3/2 3/2
(A8)
Hence
τ α θα
τ α θαθα
= − − − +
= − − − − ++ − − − +
kk j j
kk j jj j
Im(( 1 ) exp( (1 )))
( Re(( 1 ) exp( (1 )))Im(( 1 ) exp( (1 ))))
c3/2
I3/2 3/2
3/2
(A9)
With the choice of α = 1/(3θ)
τθ
τθ
τθ θ
θ
τθ θ
=− − − +
=
=− − − − +
+− − − +
=
⎛⎝⎜⎜
⎞⎠⎟⎟
kkj j
kkj j
j j
Im(( 1 ) exp( (1 )/3))3
0.4619
Re(( 1 ) exp( (1 )/3))
3Im(( 1 ) exp( (1 )/3))
3
0.32811
c
3/2
I
3/2
3/2
3/2
3/2
(A10)
Hence, τI = kc/kI = 1.408θ.
■ AUTHOR INFORMATIONCorresponding Author*Tel.: +82-53-950-5620. Fax: +82-53-950-6615. E-mail: [email protected] Lee: 0000-0001-9667-8905NotesThe authors declare no competing financial interest.
■ ACKNOWLEDGMENTSThis research was supported by the Basic Science ResearchProgram through the National Research Foundation of Korea(NRF) funded by the Min i s t r y o f Educa t i on(2016R1D1A1B03934408).
■ REFERENCES(1) Seborg, D. E.; Mellichamp, D. A.; Edgar, T. F.; Doyle, F. J., III.Process Dynamics and Control, 3rd ed.; Wiley: Hoboken, NJ, 2011.(2) Astrom, K. J.; Hagglund, T. PID Controllers: Theory, Design, andTuning, 2nd ed.; Instrument Society of America: Research TrianglePark, NC, 1995.(3) Ziegler, J. G.; Nichols, N. B. Optimum Settings for AutomaticControllers. Trans. ASME 1942, 64, 759−768.(4) Cohen, G. H.; Coon, G. A. Theoretical Considerations ofRetarded Control. Trans. ASME 1953, 75, 827−834.(5) Seborg, D. E.; Edgar, T. F.; Mellichamp, D. A. Process Dynamicsand Control; Wiley: Hoboken, NJ, 1989.(6) Lee, J.; Cho, W.; Edgar, T. F. Multiloop PI controller tuning forinteracting multivariable processes. Comput. Chem. Eng. 1998, 22,1711−1723.(7) Ho, W. K.; Hang, C. C.; Cao, L. S. Tuning of PID ControllersBased on Gain and Phase Margin Specifications. Automatica 1995, 31,497−502.(8) Marlin, T. E. Process Control: Designing Processes and ControlSystems for Dynamic Performance, 2nd ed.; McGraw-Hill: New York,1995.(9) Lee, Y.; Park, S.; Lee, M.; Brosilow, C. PID Controller Tuning forDesired Closed-Loop Responses for SI/SO Systems. AIChE J. 1998,44, 106−115.(10) Rivera, D. E.; Morari, M.; Skogestad, S. Internal Model Control4. PID Controller Design. Ind. Eng. Chem. Process Des. Dev. 1986, 25,252−265.(11) Chien, I. L.; Fruehauf, P. S. Consider IMC Tuning to ImproveController Performance. Chem. Eng. Prog. 1990, 86, 33−41.(12) Skogestad, S. Simple Analytic Rules for Model Reduction andPID Controller Tuning. J. Process Control 2003, 13, 291−309.(13) O’Dwyer, A. Handbook of PI and PID Controller Tuning Rules,3rd ed.; Imperial College Press: London, U.K., 2009.
Industrial & Engineering Chemistry Research Article
DOI: 10.1021/acs.iecr.7b03966Ind. Eng. Chem. Res. 2018, 57, 2905−2916
2915

(14) Lee, J.; Lee, Y.; Yang, D. R.; Edgar, T. F. Half Order Plus TimeDelay (HOPTD) Models to Tune PI Controllers. AIChE J. 2017, 63,601−609.(15) Grimholt, C.; Skogestad, S. Optimal PI-Control and Verificationof the SIMC Tuning Rule. IFAC Proceedings Volumes 2012, 45, 11−22.(16) Hagglund, T.; Astrom, A. Revisiting the Ziegler-Nichols TuningRules for PI Control. Asian Journal of Control 2002, 4, 364−380.(17) Astrom, A.; Hagglund, T. Revisiting the Ziegler-Nichols StepResponse Method for PID Control. J. Process Control 2004, 14, 635−650.(18) Nayler, A. W.; Sell, G. R. Linear Operator Theory; Holt, Rinehartand Winston: New York, 1971.(19) Lee, J.; Cho, W.; Edgar, T. F. Simple Analytic PID ControllerTuning Rules Revisited. Ind. Eng. Chem. Res. 2014, 53, 5038−5047.(20) Ogunnaike, B. A.; Ray, W. H. Multivariable Controller Designfor Linear Systems Having Multiple Time Delays. AIChE J. 1979, 25,1043−1057.
Industrial & Engineering Chemistry Research Article
DOI: 10.1021/acs.iecr.7b03966Ind. Eng. Chem. Res. 2018, 57, 2905−2916
2916