Embed Size (px)
Citation preview

Simple Harmonic Motion

Oscillatory SystemsPeriodic motionElasticityInertiaInterchange of energiesExamples:
Mass on helical spring Cantilever Simple pendulum Vertical rod floating in liquid

Characteristics of SHMOccurs in many systemsIsochronous oscillationPossesses springiness (elasticity) to store P.E.Possesses inertia to store K.E.Period of vibration depends on elastic and in
ertia factorsConstant total energy

Conditions for performing SHM acceleration is always directed towards a fixed
point acceleration varies directly as its distance from
the fixed point i.e. in linear motion
in angular motion
x x

Figures

Terms of Reference
AmplitudePeriodFrequency
unit: Hertz

Rotating Vector Model
As particle N describes uniform circular motion, its projection point P performs simple harmonic motion
computer simulation
Kinematics of SHM
Displacement: x = a cos t
Velocity:
Acceleration:
22 xax
xx 2

Graphs of SHM

General Relation between x & t
) sin( t a xWhere is the phase angle
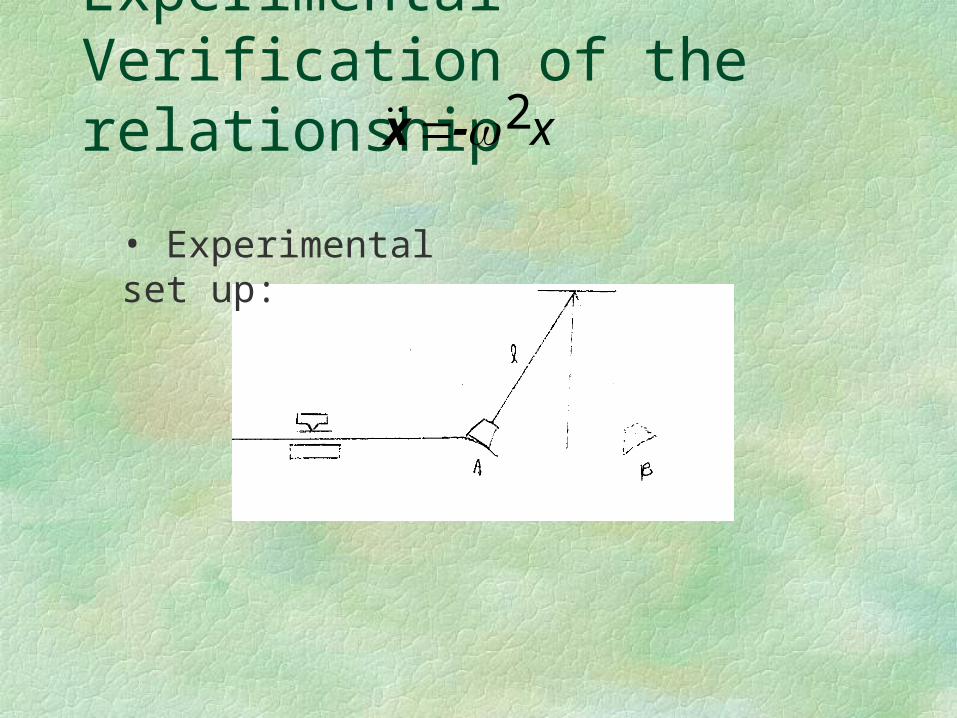
Experimental Verification of the relationship x2-x
• Experimental set up:
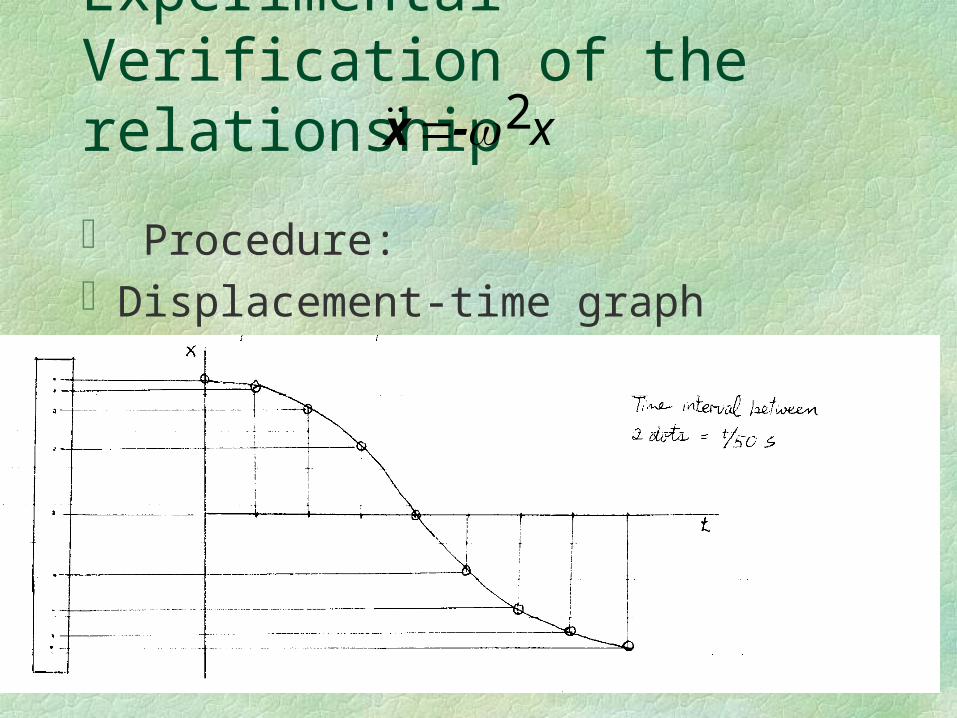
Procedure:Displacement-time graph
Experimental Verification of the relationship x2-x

x-t and tx graphs

Graphxx
x

Solving Problems on SHM
Assume displacement x from the mean position
Draw a diagram showing all forcesApply Newton’s second law with appropriate
sign conventionShow that The constant of proportionality = 2
Period T = 2/
x x

Mass on a Spiral Spring
Motion on a smooth horizontal surface
xm
kx
k
mT 2

Graph

Motion under gravity
xm
kx
k
mT 2

Floating Tube in a Liquid (1)

Floating Tube in a Liquid (2)
xm
gAx
x
h
g
g
hT 2
Effects of viscosity of liquid:
• causes damping
• takes away K.E. from the oscillating tube

Liquid Oscillating in a U-tube
xh
gx
g
hT 2

Simple Pendulum
sl
gs
g
lT 2

Arrangement of Springs (1)
K
mT 2
K = equivalent spring constant

Springs connected in series:
Arrangement of Springs (2)
nkkkK
1......
111
21

Springs connected in parallel:
Arrangement of Springs (3)
nkkkK .....21

Energy in SHM (1)
22
2
1.. xmEP
)(2
1.. 222 xamEK

Energy in SHM (2)
22
2
1am
energyTotal
constant

Phase Difference
Phase leading Phase lagging In phase Out of phase (Antiphase)

Superposition of Two Harmonic Variations
The amplitude and phase of the resultant is obtained by the parallelogram law
)cos()cos(cos tctbta

Experimental Determination of g (1)
a) A simple pendulum:
gT
22 4
• Plot a graph of T2 vs l
• Slope = g
24

b) A loaded spring:i) The static experiment: Plot the extension-load graph
k
g
m
es 1Slope:
Experimental Determination of g (2)

Experimental Determination of g (3)
ii) The dynamic experiment:
measure the period of oscillation for different loads
ks
2
2
4
22
1
4g
s
s

EXAMPLES