Embed Size (px)
Citation preview

2012
Tibor Astrab
Fortismere 6th Form
1/1/2012
Investigating Simple Harmonic Motion

Tibor Astrab
2
Contents
Aim and Summary........................................................................................ 3
Background Physics...................................................................................... 4-7
Simple Harmonic Motion (SHM).................................................... 4
Potential Energy (PE) to Kinetic Energy (KE).................................. 4-5
Simple Harmonic Motions Equations............................................ 5-7
Graphs of Displacement, Velocity and Acceleration..................... 7
Preliminary Apparatus, Method and Risk Assessment............................... 8-10
Prel iminary Apparatus.................................................................. 8
Prel iminary Method...................................................................... 8-9
Prel iminary Risk Assessment........................................................ 9-10
Safety Precautions........................................................................ 10
Preliminary Dealing with Uncertainty......................................................... 10-12
Random and Systematic Error...................................................... 10-11
Percentage Uncertainty................................................................ 11-12
Preliminary Results and Graphs................................................................... 12-15
Measuring the Spring Stiff Constant............................................ 12-13
Measuring the Effect of Mass on Time Period............................. 14-15
Preliminary Conclusion and Evaluation....................................................... 15-16
Evaluating the Results of Measurement of the Spring Stiff Constant... 15
Evaluating the Results of Effect of Mass on Time Period.......... 15-16
Main Apparatus, Method and Risk Assessment...................................................... 17-18
Main Apparatus ................................................................................... 17
Main Method....................................................................................... 17-18
Main Risk Assessment........................................................................ 18
Main Dealing with Uncertainty.......................................................................... 18
Main Results and Graphs.................................................................................... 19-20
Measuring the Spring Sti ff Constant...................................………….. 19
Measuring the Effect of Mass on Time Period................................ 20
Main Conclusion and Evaluation............................................................................. 21-23
Appendices................................................................................................................ 24

Tibor Astrab
3
Aim and Summary
My main aim is to investigate how the Simple Harmonic Motion changes when a different
mass is applied.
The experiment will consist of a mass being attached to a spring in a vertical position. The
masses themselves are made with a hook so that I can change the amount of force I am
adding onto the spring. I will also use mathematical equations to solve different types of
relationships which I will discuss in the Background Physics section.
*A simple diagram to visualise the whole experiment:

Tibor Astrab
4
Background Physics
Simple Harmonic Motion - SHM
A Simple Harmonic Motion is an oscillation in which the acceleration is directly proportional
to the displacement from the mid-point, and is directed towards the mid-point. This
basically means that the further away an oscillating object is from its mid-point, the more
acceleration the object undergoes in order to bring it back to the mid-point, also called the
restoring force. An object moving with SHM must oscillate to and fro, either side of a mid-
point. Examples of SHM include a mass oscillating on a spring (this experiment), a mass
attached to a pendulum or a mass attached in-between two strings. All of these examples
show similar results on how the movement of the mass behaves.
In order for the oscillation to actually work, there must be a force that acts upon the mass
and drives it back and forth, left to right or up and down; we call this the Restoring Force.
The restoring force is always directed towards the mid-point and gets larger as the
displacement increases and smaller if the displacement decreases. This means that as the
object passes through the mid-point, it goes to the maximum positive displacement (right
side or upwards) and then to the maximum negative displacement. This does not mean that
distance is negative, but instead the midpoint acts as the separation of the two opposite
sides.
Potential Energy (PE) to Kinetic Energy (KE)
A very important key point to remember is that the restoring force makes the object
exchange Potential and Kinetic Energy. This is because as the object moves through the mid-
point, the restoring force does work on the object and so transfers some PE to KE. As the
object passes through the mid-point and starts moving away, the KE is transferred back to
PE. From this I can assume that at the mid-point, the object’s KE is at its maximum and its PE
is at zero. I can also say that when the object is fully displaced, the PE is at its maximum and
the KE is zero.
*A table showing the relationship between KE & PE with Displacement
Kinetic Energy Potential Energy
Maximum +ve Displacement Zero Maximum
Midpoint Maximum Zero
Maximum –ve Displacement Zero Maximum
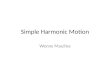
An easier way of viewing this would be on a graph that simultaneously shows the exchange
between the KE and PE.

Tibor Astrab
5
The sum of the potential and kinetic energy is the total energy. The real name for this is the
Mechanical Energy and stays constant throughout the oscillation as long as it is not damped.
Now that it is clear to see the exchange between the two energies, I will also show the
whole process for one complete oscillation.
The Energy Transfer for one Complete Cycle of Oscillation:
𝑷𝑬 → 𝑲𝑬 → 𝑷𝑬 → 𝑲𝑬 → 𝑷𝑬
Simple Harmonic Motions Equations
In this experiment, I will be using a number of different equations to help me investigate
different relations between dependant and independent variables.
The definition states that acceleration is directly proportional to the displacement, but in
the opposite direction, this gives: 𝒅𝟐𝒙
𝒅𝒕𝟐 ∝ −𝒙 For a complete oscillation, an object turns 2𝜋
radians in time 𝑇. And we know that; 𝒔 =𝑫
𝑻, this gives us 𝒔 =
𝟐𝝅
𝑻. However, since Frequency
is the inverse of Period, the equation changes to: 𝒔 = 𝟐𝝅𝒇. Therefore;
𝒅𝟐𝒙
𝒅𝒕𝟐= −(𝟐𝝅𝒇)𝟐𝒙
So if I know the values of frequency and displacement, we can work out the acceleration at
a given point.
*A graph showing the simultaneous
exchange between KE and PE

Tibor Astrab
6
In order for me to start the oscillation I must first displace the mass by a certain distance -
pulling it downwards. This will cause the spring to stretch – forming the elastic force.
The following equation is used to work out the amount of force exerted on the spring after
being stretched:
𝑭 = 𝒌𝒙
Where;
F is the Force measured in N
k is the Spring Constant (stiffness) measured in Nm-1
x is the Displacement measured in m
However, going back to the definition of SHM - acceleration being directly proportional to
the displacement, we can come out with another equation.
I know that: 𝑭 = 𝒎𝒂, so acceleration is proportional to Force. If that is the case, then the
Force on a Simple Harmonic Oscillator must also be proportional to its displacement. If I put
the equations together, we get: = 𝒎𝒂 = 𝒎𝒅𝟐𝒙
𝒅𝒕𝟐 . Using the equation: 𝑭 = −𝒌𝒙, (negative
because acceleration is in the opposite direction if displacement) we get our final equation:
𝒅𝟐𝒙
𝒅𝒕𝟐= −
𝒌
𝒎𝒙
It is also important to know how much energy has been stored when compressing or
stretching a spring. This can be worked out by looking at the area under the Extension -
Force graph.

Tibor Astrab
7
By looking at the simple equation of the area of a triangle where: 𝑨 =𝟏
𝟐𝒂𝒃 , I can apply this
to work out the energy stored. This gives me:
𝑬 =𝟏
𝟐𝒌𝒙𝟐
And at last I come to my final equation for working out the period of an oscillation;
𝑻 = 𝟐𝝅√𝒎
𝒌
This is one of the most important equations that I will be using because it can links period,
mass and the spring constant, which means that if I know two of the values; I can work out
the third just by rearranging the equation.
Graphs of Displacement, Velocity and Acceleration
Displacement – this graph can either be a cosine or a sine wave depending on when the
measurements have started. If they started when the object was at a maximum
displacement we use the cosine graph or if they started at a minimum displacement we can
use the sine graph.
Velocity – we know that velocity is just the differential of a Displacement – Time graph and
therefore it is just the gradient of the displacement graph. The oscillation is quarter of a cycle
in front of the displacement.
Acceleration – and we also know that acceleration is the differential of the Velocity – Time
and is another gradient, this time of a Velocity – Time graph. I can also see that the
Acceleration – Time graph is in anti-phase with the Displacement – Time graph.

Tibor Astrab
8
Preliminary Apparatus, Method and Risk Assessment
The main goal of the preliminary stage is to get a rough idea of what the results
should show and therefore I will not be taking extreme accuracy into account.
Preliminary Apparatus
This apparatus will not be so different from the apparatus used in the real practical. A few
minor differences such as the minimum possible measurement of the ruler or the spring
quality may be the case.
Apparatus:
Spring – this is what the oscillating mass will be attached to
Two Retort Stands – one for attaching the spring and the other for holding the ruler
Ruler – to measure the displacement
Stopwatch – to measure the time
Mass – a piece of round metal with a hook
Preliminary Method
At first, I will attach the spring to the Retort Stand, spending little time figuring out the best
possible way of doing it. I will only make sure that the spring is attached securely and so it
does not fall off at any point. I will then attach the mass at the bottom of the spring and
attach a ruler on a different retour stand right next to the oscillating system. At first I must
work out the stiffness constant of the spring; this is relatively easy and only requires three
simple steps:
Work out the Force acting on the spring using 𝑭 = 𝒎𝒈, we know the mass and the
value of gravity (9.81 ms-2)
Measure the amount of displacement
Rearrange 𝑭 = 𝒌𝒙 to 𝒌 =𝑭
𝒙 to find the stiffness constant
In this part of the experiment I will use five different masses weighing 100g, 200g, 300g,
400g and 500g. These masses will all give different displacements of the spring. Therefore,
by combining the different masses and different displacements I can take create a Force-
Extension graph from which I will find the spring stiffness constant.
I will start off by slightly pulling down on the mass and noting down the displacement. After
that, I will let go and start the timer on the stopwatch. I will note down the time taken for
one oscillation. The best way of doing this would be to measure the time taken over several

Tibor Astrab
9
oscillations and then dividing the total time by the amount of completed oscillations to get
the average period.
I will repeat these steps for different masses – thus changing the length and the stiffness of
the spring. I will also use my background knowledge in small detail to confirm that my
outcomes are relatively accurate and that my experiment is being carried out correctly.
My results will be stored on a table where I can easily note down every outcome of the
experiment. The table will include all basic information such as; the mass on the spring, the
length of the spring etc...
Preliminary Risk Assessment
Even though this is the preliminary experiment, safety precautions must still be followed to
the required extent in order to avoid any injuries and damages to me, the people around me
and any of the school’s apparatus.
The experiment its self is not very dangerous and so the working environment can take
place within the school laboratory. The apparatus being used is also safe to an extent and as
long as it is being used in the appropriate way. The two most important things to look out
for are the springs and the masses.
Springs
The springs gain energy when they are pulled apart or constricted and have the tendency to
fly off at very high speeds in random and unpredictable direction IF they are not safely
attached to a stationary point – making it possible for an injury or a small damage to take
place. It is therefore necessary for me to make sure that this is not the case and I will take
extra care attaching the spring firmly to the retour stand.
Masses
Like any other objects, metal plate masses will also gain potential energy when they are
lifted further away from the ground and can also cause injuries and damages when dropped
or thrown. In this experiment, the loads will not exceed a great mass; they will be relatively
light and based on a small circular shape with a short radius. I will also ensure that the metal
hook is connected in the right way around the spring.
Safety Precautions
I will not be required to take extra care about the clothes that I will be wearing due to the
small risks involved; however it will be necessary for me to wear the goggles because of the
potential dangers that revolves around springs.

Tibor Astrab
10
The space around me will have to be free and clear of any obstacles that may harm me or
others around me and also affect my results.
Preliminary Dealing with Uncertainty
In this preliminary section, I am expecting the uncertainty to be higher than the
uncertainty in the actual practical.
Every measurement that I take will always have some error in it, causing uncertainty. I can
minimise this error by taking certain actions, these may include; changing the measuring
equipment for a more accurate one, using a spring that has a better quality etc…
There are two types of errors;
Random Error
Systematic Error
Random Error
Random error is something that I cannot stop from happening. These errors may come from
all sorts of circumstances such as; tilting my head at a slightly different angle when noting
down the same measurement or even the effects of noise.
Systematic Error
Systematic errors occur due to the apparatus I am using. This means that the errors can be
changed and minimised if I just change the apparatus. For example; if my ruler measures to
the nearest centimetre, I can change that by replacing it with something that measures to
the nearest millimetre, thus reducing the uncertainty.
In my preliminary practical, the possible random errors are;
The direction of the wind – even though I am in an enclosed space (the laboratory)
there is still a chance of a relatively weak force of wind being created due to the
other pupils walking past my experimental area. It may seem very small, but it still
may affect the oscillation of my mass on spring.
Measuring the displacement – every time I take a reading from the ruler, there is a
very high chance that I may observe the value at a slightly different angle, thus giving
me a slightly different reading from the true value.

Tibor Astrab
11
The unstoppable movement of the spring – after I attach a mass on the spring, it is
very difficult for me to stop it bopping up and down. It bops up and down by a very,
very small distance but still affects my results in some way.
In my preliminary practical, the possible systematic errors are;
The Ruler – the ruler measures to the nearest millimetre – making my range of
uncertainty to be ±0.5mm (±0.0005m). I will then use this value each time I get a
reading and divide it by that reading and find the product of that value and 100 to
get my final percentage uncertainty. To simply what I just stated, I will use this
equation:
% 𝑢𝑛𝑐𝑒𝑟𝑡𝑎𝑖𝑛𝑡𝑦 = (± 0.0005
𝑎𝑐𝑡𝑢𝑎𝑙 𝑟𝑒𝑎𝑑𝑖𝑛𝑔) × 100
Acceleration due to Gravity – it is known that the range of uncertainty of
acceleration due to gravity is ±0.1ms-2. Again, using the same method as before I get:
% 𝑢𝑛𝑐𝑒𝑟𝑡𝑎𝑖𝑛𝑡𝑦 = (± 0.5
𝑔) × 100
In this case however, I will only be using one value for the denominator: g = 9.81.
This allows me to make the calculation now: (± 0.5
9.81) × 100 = 1.02%~1%
The Stopwatch – in this case I am using a digital stopwatch that measures to 2
decimal places. This means that my 2nd decimal value could either be very close to
zero or very close to one, implicating that my 2nd decimal number was about to
change or just turned to that number. So I will choose my range to be ±0.01s.
% 𝑢𝑛𝑐𝑒𝑟𝑡𝑎𝑖𝑛𝑡𝑦 = (± 0.01
𝑎𝑐𝑡𝑢𝑎𝑙 𝑟𝑒𝑎𝑑𝑖𝑛𝑔) × 100
The reason why I want to find the percentage uncertainty in my results is so that I can work
out the actual percentage error when it comes to doing calculations using the equations
stated earlier.

Tibor Astrab
12
For example:
When I want to measure the spring stiff constant, I use the equation 𝑘 =𝐹
𝑥. But first I
must work out the force by multiplying the mass by the acceleration due to gravity. If
my mass is 100g (0.1kg), I multiply the gravity (9.81) by this mass. However, the
percentage uncertainty due to gravity is ±1%, and so my answer will look like this –
𝐹 = 𝑚𝑔 = 0.1 × (9.81 ± 1%) = 𝟎.𝟗𝟖𝟏 ± 𝟏%𝑵
I measured my extension to be 0.032m with the range of uncertainty of ±0.0005m.
This makes my percentage uncertainty (using the equation above) ±1.56% rounding
to 1 decimal place – ±1.6%.
So my final answer with the percentage uncertainty is:
𝑘 =0.981 ± 1%
0.032 ± 1.6%= 𝟑𝟎. 𝟔𝟓𝟔 ± 𝟐. 𝟔%𝑵𝒎−𝟏
Preliminary Results and Graphs
In this section I will display the results that I collected in the preliminary practical. The
results will be displayed in Tables and Graphs. The purpose of graphs is to easily visualise
any patterns that may appear between different variables as well as to calculate any data.
My graphs will also include range bars, showing the highest and lowest value obtained for
the same result. In the preliminary, I repeated my experiments 5 times.
Preliminary Results
Measuring the Spring Stiff Constant
When I started my practical, it turned out that the spring stiff constants of the springs were
not known. However, I assumed that all of the springs were the same; this is because they
looked completely identical – the size, the width, the weight and even the colours were
matching and they all came from the same plastic bag. My first task was to find out the
spring stiff constant.
Method
This method was already shown in my example when I calculated the percentage
uncertainty of the spring stiff constant so I will not go into much detail, instead I will only
show the main steps.

Tibor Astrab
13
First I measured the Force using 𝑭 = 𝒎𝒈
Then I measured the extension of the spring in metres
This process was repeated for 5 different masses on the spring, ranging from 0.1kg
to 0.5kg
A Force-Extension Graph was plotted and analysed to find the spring stiffness
constant
Average Results
Mass (kg) Force (N) [±0.0981]
Extension (m) [±0.0005]
0.1 0.981 3.20×10-2
0.2 1.962 7.17×10-2
0.3 2.943 11.2×10-2
0.4 3.924 15.1×10-2
0.5 4.905 19.3×10-2
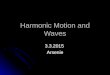
Force-Extension Graph
Since 𝒌 =𝑭
𝒙 I can plot a Force-Extension graph and use the gradient of the line to find out
the spring stiff constant.
y = 24.468x + 0.2045
0
1
2
3
4
5
6
0 0.05 0.1 0.15 0.2 0.25
Forc
e [±
0.0
98
1]
(N)
Extension [±0.0005] (m)

Tibor Astrab
14
Measuring the effect of mass on time period
This time I am looking at how the time period changes when different weights are applied to
the spring.
Method
At first I’ve attached a mass on the spring, allowing the spring to stretch naturally
I then prepared the stopwatch to measure the time over 10 oscillations
Next step was to gently pull down on the spring and letting go, this would start off
the oscillation
After I noted the time taken for 10 oscillations, I would divide that time by 10 so that
I get an average value for the period for 1 oscillation only
Average Results
Mass (kg) 10 Periods (s) Period (s) (Period)2 (s)
0.1 3.968 0.397 0.158
0.2 5.682 0.568 0.323
0.3 6.866 0.687 0.471
0.4 7.814 0.781 0.611
0.5 8.726 0.873 0.761
After obtaining my results, I found the most appropriate graph that will allow me to
calculate the spring stiffness constant. Here is how I do it:
At first, I square both sides of the equation ‘𝑇 = 2𝜋√𝑚
𝑘 ‘ to get 𝑇 2 = 4𝜋 2 𝑚
𝑘
I can then plot a T2-Mass graph in which the gradient would equal to 4𝜋2
𝑘
Since the gradient = 4𝜋2
𝑘, I can rearrange to get 𝑘 =
4𝜋2
𝑔𝑟𝑎𝑑𝑖𝑒𝑛𝑡

Tibor Astrab
15
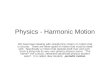
(Period)2-Mass Graph
Preliminary Conclusion and Evaluation
Evaluating the Results of Measurement of the Spring Stiff Constant
The equation of the graph is 𝒚 = 𝟐𝟒.𝟒𝟔𝟖𝒙 + 𝟎. 𝟐𝟎𝟒𝟓 and since the general equation for
linear graphs is 𝑦 = 𝑚𝑥 + 𝑐, the gradient for my Force-Extension line is 24.468.
Therefore the Spring Stiff Constant = 24.468Nm-1
The equation actually represents the thin black line that runs through the thicker blue line.
The blue plots are the actual results obtained whereas the black line is a ‘line of best fit’.
Since the line of best fit is very similar and practically runs through the same points as the
blue line, I can assume that the gradient is correct and accurate enough for me to do my
calculations.
Evaluating the Results of Effect of Mass on Time Period
The equation of the (Period)2-Mass Graph is 𝒚 = 𝟏.𝟒𝟗𝟓𝟓𝒙 + 𝟎.𝟎𝟏𝟔𝟏. From this I can see
that the gradient is equal to 1.4955. I will then use the rearranged equation mention earlier
to find out the spring stiffness constant.
𝒌 =𝟒𝝅𝟐
𝒈𝒓𝒂𝒅𝒊𝒆𝒏𝒕
𝒌 =𝟒𝝅𝟐
𝟏.𝟒𝟗𝟓𝟓= 𝟐𝟔.𝟑𝟗𝟖𝑵𝒎−𝟏
In the first method, I calculated the gradient of a Force-Extension graph which was equal to
the spring stiffness constant. This method was relatively straightforward and required little
y = 1.4955x + 0.0161
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
0 0.1 0.2 0.3 0.4 0.5 0.6
(Pe
rio
d)2
(s)
Mass (kg)

Tibor Astrab
16
time. However, the second method involved the use of the equation ‘𝑇 = 2𝜋√𝑚
𝑘 ‘ where I
had to do some algebra and rearranging to obtain the most suitable graph that will allow me
to work out the spring stiffness constant. The second time I obtained the spring stiffness
constant, it was slightly bigger than the previous one - This time it was 26.398Nm-1 but there
is no cause for concern since the difference is small. This could be due to the fact that I’ve
measured the same thing using two completely different methods - involving different
techniques and calculations.
The difference between the constants could also had come from the different results
obtained, for example; the smallest time taken for a full oscillation for a mass of 0.1kg was
0.395s and the longest time taken was 0.400s, with a difference of only 0.005s. This was
most likely caused by me not pressing the stop button on the stopwatch at the right time; it
is possible that I waited just slightly longer or shorter before stopping the timer. I also could
have had my head at a slightly different angle as I was timing the oscillation each time,
meaning that the time I measured was either accounted for slightly more or less than 10
oscillations.
This sort of error falls under a random error and is nothing I can do about so when it comes
to my main experiment, I will still use a very similar method to measure the time period.
This is the end of my preliminary experiment. In my main experiment, I will
state the improvements that I’ve made in order to increase my accuracy and
reliability of my results.

Tibor Astrab
17
Main Apparatus, Method and Risk Assessment
In my main experiment I would have made improvements to my measurements
and methods of obtaining different data. This means that I have considered the
different factors that were affecting my reliability and accuracy and tried to
change them.
Main Apparatus
The main Apparatus will differ just slightly from the preliminary to improve reliability and
accuracy.
Apparatus:
Spring – this is what the oscillating mass will be attached to
Retort Stand – this is where the spring will be attached to
Ruler – to measure the displacement
Stopwatch – to measure the time
Mass – a piece of round metal with an attachment
Improvements/New Apparatus:
Straight, Thin Stick – this is used for when I am calculating the time period. It helps
when I place it behind the oscillating system, creating a horizontal line in the
background that makes it easier for me to see when the mass has passed the
midpoint.
Four Plain Plastic Squares – these four plastic squares are placed around the
oscillating system in order to isolate it from the surroundings and mainly any force of
wind that can affect my results.
Weighing Scale – In order to measure my masses, I used an accurate and electric
digital weighing scale. It is also important to mention that this time I will be using
ten different masses instead of just five, meaning that my new results will vary
from 0.1kg to 1kg.
Main Method
The main method is also not so different from the preliminary. Minor changes such as the
isolation of the experiment from the rest of the laboratory and using a brand new spring
were introduced.

Tibor Astrab
18
I will start off by placing two retort stands next to each other on a stable, straight desk. The
retort stand on the left will be holding a ruler in a vertical position where as the other retort
stand will be used as a grip to which the spring will be attached, also in a vertical position. I
will then attach my first mass (0.1kg) with a hook onto the spring and measure the
displacement. I will note down my results using this method up to a mass of 1kg (twice as
much than preliminary). This is so that I can get a rather more accurate value of the spring
stiff constant which seems to get more accurate and closer to the true value as I add more
mass and hence increase the extension of the spring. I will repeat this process six times –
adding an extra take than in the preliminary trial. In my second part I will calculate the time
period for every oscillating mass. I will do this by displacing the attached mass by a short
amount and the gently letting go while also starting the stopwatch after it has passes the
horizontally positioned stick in the background. This time I will also count up to 10
oscillations and so I will be diving the time period by 10 in order to get the average time
taken for only one oscillation. For all of my takes, I will be isolating the experiment by
placing the plastic squares in order to avoid any possible disruptions that may come from
the laboratory.
Main Risk Assessment
The new apparatus and the method itself combined do not really add any major dangers to
me and the others or the surroundings. The plastic squares are very light and relatively small
and so do not require any extra precautions. On the other hand, I will be using heavier
equipment because I will be doubling the amount of mass than previously used by up to 1kg
that may potentially be more dangerous than the preliminary outtake. I will therefore take
extra care in my area and attach the spring very securely to the retort stand to eliminate any
possible threats.
Main Dealing with Uncertainty
Unfortunately, I was not able to improve any of my measuring equipment such as the ruler
and the stopwatch. This means that all of my percentage uncertainties will stay the same for
the main experiment. However, I did add measuring equipment – the weighing scale. The
weighing scale measured up to 2 decimal places in grams and so my percentage uncertainty
is worked out like this:
% 𝑢𝑛𝑐𝑒𝑟𝑡𝑎𝑖𝑛𝑡𝑦 = (± 0.01
𝑎𝑐𝑡𝑢𝑎𝑙 𝑟𝑒𝑎𝑑𝑖𝑛𝑔) × 100
This percentage uncertainty will be mentioned next to every result obtained for weighing
the masses.

Tibor Astrab
19
Main Results and Graphs
Measuring the Spring Stiff Constant
Average Results
Mass (kg) [±0.01]
Force (N) [±0.0981]
Extension (m) [±0.0005]
0.09904 0.972 3.20×10-2
0.19977 1.960 7.20×10-2
0.29972 2.940 10.8×10-2
0.39954 3.919 14.5×10-2
0.49983 4.903 18.5×10-2
0.60233 5.909 22.3×10-2
0.70286 6.895 26.3×10-2
0.80107 7.858 30.4×10-2
0.90090 8.838 34.4×10-2
1.00053 9.815 38.1×10-2
Force-Extension Graph
Spring Stiff Constant = 25.283Nm-1
In this case the equation of the line is 𝑦 = 25.283𝑥 + 0.2006. So the gradient is 25.283.
y = 25.283x + 0.2006
0
2
4
6
8
10
12
0 0.1 0.2 0.3 0.4 0.5
Forc
e [±
0.0
98
1]
(N)
Extension [±0.0005] (m)

Tibor Astrab
20
Measuring the Effect of Mass on Time Period
Average Results
Mass (kg) 10 Periods (s) Period (s) (Period)2 (s)
0.09904 3.588 0.359 0.129
0.19977 5.045 0.505 0.255
0.29972 6.097 0.610 0.372
0.39954 7.055 0.706 0.498
0.49983 7.818 0.782 0.611
0.60233 8.518 0.852 0.726
0.70286 9.138 0.914 0.835
0.80107 9.692 0.969 0.939
0.90090 10.187 1.019 1.038
1.00053 10.647 1.065 1.134
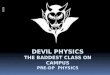
(Period)2-Mass Graph
y = 1.118x + 0.038
0
0.2
0.4
0.6
0.8
1
1.2
1.4
0 0.2 0.4 0.6 0.8 1 1.2
(Pe
rio
d)2
(s)
Mass (kg)

Tibor Astrab
21
Main Conclusion and Evaluation
Evaluating the Results of Measurement of the Spring Stiff Constant and Time
Period
𝑇2 = 4𝜋 2𝑚
𝑘
𝑔𝑟𝑎𝑑𝑖𝑒𝑛𝑡 = 4𝜋 2
𝑘
𝒌 =𝟒𝝅𝟐
𝒈𝒓𝒂𝒅𝒊𝒆𝒏𝒕=
𝟒𝝅𝟐
𝟏.𝟏𝟏𝟖= 𝟑𝟓.𝟑𝟏𝟐𝑵𝒎−𝟏
This was a very odd result and differed from all the others that I’ve obtained. In this
experiment I carefully measured every mass that I attached to the spring and used it to work
out the force. Because the amount of precision that I used changed, it most likely
contributed to this odd result. For example; instead of writing 0.1kg, I weighted the mass
and got 0.09904kg. I did the same for all the other masses. This means that just because the
result is different from all the others, it does not mean it is wrong or inaccurate since the
precision was much higher than before. On the other hand however, out of the four
experiments that I did (2 preliminary and 2 main), the other three all showed a similar result
and therefore I will still assume that the odd result obtained is still most likely to be faulty.
After collecting my results, I decided to compare the time periods that I’ve obtained with
those that I’ve worked out from the Time Period Equation; 𝑇 = 2𝜋√𝑚
𝑘
Here is a table that compares the obtained time periods, with the time periods worked
out from the equation:
As ‘m’ - mass, I will be using the values obtained in the main experiment
As ‘k’ – spring stiff constant, I will be using the average of the spring stiff constants
that I’ve worked out in both of the preliminary and one of the main experiments. I am
excluding the very last one because it showed to be very different –
=24 .468 +26.398 +25.283
3= 𝟐𝟓.𝟑𝟖𝟑𝑵𝒎−𝟏
The values for the time periods that I’ve worked out in the main experiment is the
average of all of the six takes

Tibor Astrab
22
Mass (kg) Time periods worked out from the main
experiment
Time period using; 𝑻 =
𝟐𝝅√𝒎
𝒌
0.09904 0.359 0.385
0.19977 0.505 0.546
0.29972 0.610 0.669
0.39954 0.706 0.773
0.49983 0.782 0.864
0.60233 0.852 0.949
0.70286 0.914 1.025
0.80107 0.969 1.094
0.90090 1.019 1.160
1.00053 1.065 1.223
From looking at the data, I can say that my results were similar to those calculated using the
equation, even though they varied slightly. The uncertainty in this case is small and so my
data proves to be reliable. Observing the table above, I’ve noticed that as the added mass
gets greater, the difference between the two time periods increases – this is a similar case
that occurred with the spring stiff constant. A possible explanation for this would be to say
that as I added more mass, the oscillation was more vigorous – by that I mean that as the
system was oscillating, the attached mass was not progressing in a straight manner, instead
it would move from side to side at different times of the oscil lation. This made it much
harder for me to calculate the true value for the time period.
At last, I would also like to add another important key point. It is already known that Time
Period is Proportional to the Square Root of Mass. I can see if my res ults are correct by also
checking them with this statement;
If 𝑻 ∝ √𝒎
I can take out the two necessary values from the table above and work out the constant
between the time period and the square root of mass. I will choose the very first row;
mass of 0.09904kg and the period of 0.359s.
I get; 0.359 ∝ √𝟎.𝟎𝟗𝟗𝟎𝟒
So 0.359 = c√𝟎.𝟎𝟗𝟗𝟎𝟒
And so c = 𝟎.𝟑𝟓𝟗
√𝟎.𝟎𝟗𝟗𝟎𝟒

Tibor Astrab
23
Now that I’ve calculated my constant, I can use it to find other Time periods by knowing the
mass attached to the spring. I will check this with the second row, using a value of
0.19977kg to give me a period of around 0.505s.
𝑻 =𝟎.𝟑𝟓𝟗
√𝟎.𝟎𝟗𝟗𝟎𝟒 × √𝟎.𝟏𝟗𝟗𝟕𝟕 = 𝟎.𝟓𝟏𝟎𝒔
Again, the value that I calculated using an equation of proportionality gave me a very similar
result to one I’ve obtained in the practical.
Final Conclusion
Throughout both, the preliminary and the main experiments, there was a lot of evidence
suggesting that when I improved my techniques of obtaining the results, my data proved to
be more accurate and reliable. These improvements consisted of measuring the masses on
an accurate scale as well as increasing the amount of mass attached to the spring.
In overall, the data in the real experiment proved to be more precise when I compared
some of the results with the ones that worked out using the different formulae.
The End

Tibor Astrab
24
Appendices
Equations and Background Physics
CGP A2 Level Physics – Complete Revision and Practice
Advancing Physics A2 – OCR B
Advancing Physics – A2 Course Booklet Fortismere School Physics Department
Graphs of Displacement, Velocity and Acceleration
CGP A2 Level Physics – Complete Revision and Practice
Google Images
Percentage Uncertainty
CGP AS Level Physics – Complete revision and Practice
Advancing Physics – A2 Course Booklet Fortismere School Physics Department