Embed Size (px)
Citation preview

COMPUTER VISION, GRAPHICS, AND IMAGE PROCESSING 51, 87--95 (1990)
NOTE
Simple Connectivity Is Not Locally Computable for Connected 3D Images
CHUNG-NIM LEE*
Department of Mathematics, Pohang Institute of Science and Technology, P.O. Box 125 Pohang, 790-330 Republic of Korea
AND
A Z R I E L R O S E N F E L D
Center for Automation Research, University of Maryland, College Park, Maryland 20742
Received December 17, 1986; accepted July 12, 1989
It is well known that "is connected" is not locally computable for 2D (or, hence, higher dimensional) images. We show that "is simply connected" and "is contractible" are locally computable for connected images in 2D, but not in 3D. Orientability of a surface is likewise not locally computable. �9 1990 Academic Press, Inc.
1. INTRODUCTION: TOPOLOGY AND PARALLELISM
Most computer vision problems involve 2D digital images, but analogs for all except the reconstruction of the third dimension arise also for the 3D output of such devices as a medical CAT scan. In particular, objects must be recognized; matched to identifying characteristics. Some, like vertebrae, can best be character- ized by rigid, metrical features; others are highly flexible and change shape, by external forces or (like the beating heart) actively. This gives importance to topological features, invariant under continuous deformation and thus undisturbed by flexion. Such features include connectedness, number of cavities, number of holes through the object, and so on. Conversely, given identification of an organ, these numbers can have diagnostic value; deviation from the usual number of passageways through the heart, for example, is always a pathology.
Given the enormous processing task involved, on the one hand, and the example of animal vision on the other, there has been great attention to parallel methods in 2D and 3D visual processing. Some problems in this area, however, parallelize more naturally and completely than others. The convenient characteristic of local computability, which greatly simplifies parallelization, was first studied in the context of the perceptron.
The perceptron was one of the first brain-like computing devices for vision; it can be described now as a special class of single-layer neural network. Initially developed by Rosenblatt [1], it has been exploited by many authors since. Its learning capability is unsurpassed by any multilayered neural net so far developed, and it is the only such device for which there is a systematic theory of what it can
*The support of the U.S. Air Force Office of Scientific Research under Grant AFOSR-86-0092 is gratefully acknowledged.
87 0734-189X/90 $3.00
Copyright �9 1990 by Academic Press, Inc. All rights of reproduction in any form reserved.

88 LEE AND ROSENFELD
FIc. 1. The human brain does not decide by a parallel algorithm which of these figures from [5] are connected; not surprisingly, nor can a perceptron.
compute (as distinct from, say, a theory of convergence to any result at all). The theory, due to Minsky and Papert [5], also reveals its limitations; in particular, it cannot detect the connectedness of certain digital images on the basis of local data, assembled in its simple addition + threshold end step to a global result. (One can generalize this end step somewhat, introducing, for instance, a nonlinear function of the sum before testing the threshold, without affecting the results below. But unless the end step is prohibited from including an entire serial program, no general results can emerge about the capabilities of the parallel part of the system.) Some things that a brain computes, a diameter-limited perceptron cannot.
In retrospect, it is not clear why this theorem caused such dismay. The experi- ence of deciding for oneself which of the two forms in Fig. 1 (the cover of Minsky and Papert 's book [5]) is connected, and which one has two components, makes it very clear that the human brain uses a sequential, exploratory approach; it is no great condemnation of a far simpler pure-parallel device to fail at the task. (The surprise should be more the other way, at the fact that some topological invariants are computable by such devices, though traditionally expressed in terms of ones that are not.) Those who had convinced themselves--by theoryless t inker ing-- that a perceptron could do everything were chilled to learn that it could not; but the shock should not have been so general.

C O N N E C T E D 3D IMAGES 89
General neural nets, with their multiple layers and (in some versions) neighbor- to-neighbor connections, are not subject to this impossibility theorem. However, local computability remains an important characteristic of a task, since it greatly reduces the need for distant internode communication (direct or via intermedi- aries), which is often a computational cost both heavy and hard to analyze. Algorithms--and, in a dedicated parallel device, architecture--can be much simpler.
Once a 2D image is known to be connected, the rest of its topology is locally computable. In particular, the predicates "is simply connected" (any cut that does not begin or end inside it separates it into two pieces) and "is contractible" (the image can be shrunk to a point without leaving the region it originally filled) are both equivalent to the Euler number being 1, and this number can be locally computed with great efficiency. In this note we show that this fails for the analogous 3D image predicates and for orientability of a surface with boundary.
We give a definition of local computability in Section 2, based on the diameter- limited perceptron. Two- and three-dimensional images are treated in Sections 3 and 4, respectively, in the latter discussing both connectivity and surface orientabil- ity.
Our results generalize Minsky and Papert's theorem about connectedness to other topological invariants of interest to the computer classification of images, with similar consequences for parallelizability.
2. DEFINITIONS
We assume the reader to be familiar with the basic terminology and facts of the digital geometry of 2D images, as found in Chapter 11 of Rosenfeld and Kak [6], and also preferably of 3D images, as found in Rosenfeld [7].
Let U~ be the set of n-dimensional digital images S within a fixed window ~, where n = 2, 3 will usually be fixed by context. Connectivity is always relative to a particular notion of adjacency for points in ~; we suppose some particular notion chosen, but do not specify it since our proofs hold for all in current use. If a real-valued function ~b is defined on f~:~ for some subset ~ of E, we have an automatic extension S ~ ~b(S n ~) to images S in ~, which we will denote by the same symbol ~b. Calling such defined-on-subsets ~b local functions, we refer to a linear combination of their extensions to Z as a global function. If qb is a particular set of local functions ~b, the combination E6 ~,c6~b is based on cb.
The collection ~ is diameter-limited if each ~b ~ ~ is defined on the images in a subset ~6 c 2s where the diameter of no ~6 exceeds some universally prescribed size 6 < diam(~s A function th is locally computable if it is based on some diameter-limited collection ~. For example, ~O(S) = Volume(S) is dearly a locally computable function on f~, with 6 a single pixel width. If x(S) is the Euler number of S with respect to a certain fixed adjacency, then X is locally computable with S = fn- pixel widths (see Minsky and Papert [5] and Horn [2] for 2D images, Lee, Poston and Rosenfeld [3] for the 3D case). This is often stated as follows.
LEMMA 2.1. The Euler number x(S) is locally computable.
An image recognition predicate, or simply a predicate, is a Boolean function defined on ~ . For example, the predicate, ~O . . . . ~x for recognizing convexity of an

90 LEE AND ROSENFELD
�9 image must satisfy
( 1 if X is convex otherwise.
In this note we consider I~connected , ~/simply connected, ~/contractible, and I~orientabl e. In some cases it is sensible to restrict their domains of definition; for example, simple connectedness is usually defined only for images that are connected (though it can be required on each connected component separately), so we restrict it to the subcollection ~'~connected C ~ of all connected images, instead of all ~ .
If ~ is a collection of local functions with values 0, 1 (that is, of predicates), a global predicate based on �9 is a function
=
1 if ~ c0~b > 0
0 otherwise,
where the c o are real coefficients. With different multipliers c o or different threshold 0, we get a different global predicate. The global predicate �9 is called locally computable if by the previous definition E o ~ .co~b is.
3. SIMPLE CONNECTIVITY FOR 2D IMAGES
A connected image S in two dimensions is simply connected if it is separated into two pieces by any cut (Fig. 2). (This definition goes back to Riemann; modern definitions, involving the shrinking of paths, require more technicalities.) The 1-dimensional Betti number i l l ( S ) of S is the maximum number of simultaneous cuts that can be made without separating S: the 0-dimensional Betti number il0(S) of S is its number of connected components; so S is simply connected if il0(S) = 1, ill(S) = 0. In 2D the number ill(S) equals the number of holes in S (or bounded components of the background).
The Euler number in 2D can be defined as x ( S ) = i lo(S) - ill(S). For S connected ilo(S) = 1, so that ill(S) = 1 - x ( S ) . Thus, since x(S) is locally com- putable (Lemma 2.1) we have
LEMMA 3.1. The predicate I~simply . . . . ected /S locally computable on the subcollec- lion ~'~ connected"
although decoding whether an image belongs to the subcollection is not locally computable, and without this information, simple connectedness cannot be com- puted locally. It is interesting to note that neither ilo(S) nor ill(S) is locally computable (since we have ilo(S) = 1 exactly when S is connected, ill(S) = 0 exactly when the background is connected, and neither of these predicates is locally computable), but their difference x(S) is.
4. SIMPLE CONNECTIVITY IN 3D
In three dimensions, bounded components of the background are known as cavities, and their number is the two-dimensional Betti number il2(S).
The number ill(S) is often introduced as the number of "holes" in S, but this is ambiguous for shapes like Fig. 3. Algebraic topology provides group-theoretic

CONNECTED 3D IMAGES 91
FI6. 2. A cut in a 2D set S is a curve C whose end points--if any--lie on the boundary of S. It separates S if there are two points in S that can be joined only by curves that cross C. Any curve (such as either of the two shown) separates a disk into two pieces; the curve joining the dots on the annulus does not separate it, but any further cut would do so.
definit ions of ~I(S), but the geomet r ic definit ion with fewest prerequis i tes is again the m a x i m u m n u m b e r of non-separa t ing cuts. ( In this d imens ion a cut is a surface, with any bounda ry curve lying in the bounda ry of S.) W e then say a connec ted image S is simply connected if any cut separa tes it, i.e., if /31(S) = 0. I t is clear tha t the "cu t s " definit ion gives Fig. 3, /31(S) = 1, bu t the " n u m b e r of holes" is not obvious. T h e r e are 10 holes in the p a p e r image, but in 3D the left- and r ightmost could clearly be untwisted. A topological a rgumen t requir ing m o r e appa ra tus than we wish to in t roduce he re shows tha t /31 of the background is one, but it is clear tha t Fig. 3 has m o r e distinct "ways th rough it" than a s imple donut shape. T h e " c u t " idea defines be t t e r than "ho le s " the in ternal- to-S na ture of the invar iant /31(S). In this dimension, with Bett i number s thus defined, the Eu le r n u m b e r is
x ( S) = t3o( S) - s ) + t32( s ) .
If, and only if, /30(S) = 1 while /31(S) = ~2(S) = 0, s tandard tools of algebraic topology show that S is contractible: imagining the background as p las ter set a round the image, S could shrink to a point (without tearing), inside the cavity it c rea ted by its p resence while the p las te r ha rdened . In two dimensions "s imply connec ted" and "con t rac t ib le" are equivalent , bu t in th ree this is false; if S is a

92 LEE AND ROSENFELD
Fro. 3. How many holes does this solid have?
spherical surface,
= 1, & ( s ) = o, & ( s ) = 1,
so that S is simply connected but not contractible. In structure, the proof below follows that in [5] for connectedness.
PROPOSlTrON 4.1. The predicate ~/simply connected /$ not locally computable, even on the subcollection ~'~connected, and hence not on II.
Proof. For a given diameter limit & consider the four shapes in Fig. 4. (Each occupies the same convex hull C in E.)
Figures 4b and c are not simply connected: cuts along the heavy lines do not separate them. The other two figures are pairs of cups (distorted disks) joined at the subdisk of their common face and easily shown to be simply connected.
Now, take gO as the set of all locaI functions diameter-limited by & and suppose we have {c+}, 6 such that I/Isimply connected = 1 if and only if E~ ~,~c,& > 0. Let q~ON consist of those r ~ ~ whose domain of definition meets the near end of the convex hull C, (1) F analogously for the far end, and q~M be the rest. Since L > 3, no 4~ meets both ends, so the three sets are disjoint and
4 , ~ 4~ ~ cl, u 4, ~ e~M 4'E~F
This sum must be < 0 on Figs. 4b and c, and > 0 on 4a and d.

CONNECTED 3D IMAGES 93
�9
(el ( a )
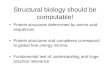
FIG. 4. Two square tubes of length L > 6, joined along one side, with exactly one tube capped at each end, in the four ways possible. Cuts along the heavy curves do not separate (b) and (c); any cut separates (a) or (d).
The differences between 4 a - d are confined to the ends, so on these figures the middle term has a fixed value, M say; define | = 0 - M. The left-hand te rm has one value (say A N) on 4a and b, since they are identical within ~ of the near end, and similarly one value (say B N) on 4c and d. The right-hand te rm has one value A F on 4a and c, and one value B F on 4b and d. Thus the inequalities required on 4 a - d give
A N -t- A F > | A N + B F ~ ~), B N + A F < 0 , B N q- B F > ~ ,
respectively, giving a contradiction if we sum the > and < pairs separately. []
In consequence, jgl(S) is not locally computable o n ~connected (or, therefore, on ~) , since we cannot determine whether it is zero. Note that, since/32(S) has the same values as if/simply connected on 4a-d , this number is likewise not locally computable on ~connected"
Of the four surfaces in Fig. 5, 5c and d are one-sided surfaces while 5a and b are two-sided (orientable). Thus a precisely similar proof to Proposition 4.1 establishes

94 LEE AND ROSENFELD
L o)
FIc. 5. Surfaces (a) and (b) are two-sided, while (c) and (d) are M6bius bands. Surfaces (a) and (d) have identical far ends, as do (b) and (c); surfaces (a) and (c), like (b) and (d), have identical near ends.
PROPOSITION 4.2. The predicate ~orientable is not locally computable on the class of all surfaces in ~.
5. CONCLUDING REMARKS
Other limitations than diameter are possible; in particular, Minsky and Paper t [5] prove that ~tconnecte d is also not computable with a limit on the number of pixels in the domain of each ~b, a more general though less brainlike restriction. Given the finite number of connections possible for each parallel node, this suggests the conjecture that no parallel a lgor i thm--even with unlimited p rocessor s - -can com- pute it in a time independent of image size N except for a final O (log 2 N ) addition stage, as one can do for x(S). (Typical algorithms in current use sweep over the image, one or often more times, with processors idle or trivially occupied except when a wave of change goes by.) A proof of this would depend on a formal notion of parallel automaton, such as the theory developed in Rosenfeld [7]. Meanwhile, the perceptron results for both types of limit can be extended to all other Betti numbers [4], though the argument is somewhat more complicated and the 19 th Century approach to ilk(S) used above must be replaced by modern techniques.
In any computat ion device, we predict that the easy determination of x(S) will remain a contrast with all other connectivity invariants.
REFERENCES 1. F. Rosenblatt, Principles of Neurodynamics, Spartan, New York, 1962. 2. B. K. P. Horn, Extended Gaussian images, Proc. IEEE 72, 1984, 1671-1686.

CONNECTED 3D IMAGES 95
3. C. N. Lee, T. Poston, and A. Rosenfeld, Winding and Euler numbers for 2D and 3D digital images, submitted.
4. C. N. Lee and T. Poston, Betti numbers are not order-limited perceptron computable, to appear. 5. M. Minsky and S. Papert, Perceptrons: An Introduction to Computational Geometry, MIT Press,
Cambridge, MA, 1969. 6. A. Rosenfeld and A. C. Kak, Digital Picture Processing, 2 nd ed. Academic Press, New York, 1982. 7. A. Rosenfeld, Picture Languages, Academic Press, New York, 1977.