Embed Size (px)
Citation preview

Signals, Instruments, and Systems – W11
Localization Techniques &
Traditional and Advanced
Instruments for
Environmental Monitoring

Outdoor Positioning
Systems

Selected Outdoor Positioning
Techniques
• GNSS: GPS
• Differential GPS (dGPS)
• Assisted GPS (aGPS)
• Acustic Positioning Systems

Global Navigation Satellite System
(GNSS)• a system of satellites that provide autonomous geo-spatial positioning with global coverage
• allows small electronic receivers to determine their location to within a few meters using time
signals transmitted along a line-of-sight by radio from satellites
NAVSTAR-GPS (U.S.)• developed in 1973 by
the U.S. Department of
Defense
• fully operational in 1994
• Originally: 24 satellites
• Currently: ~31satellites in
orbit and healthy
GLONASS (Russia)• development began in
1976 in the U.S.S.R.
• 24 satellites by 1995
• quickly fell into disrepair
• back to full constellation
since October 2011
• only current alternative to
GPS
GALILEO (Europe)• October 2011: first 2
operational satellites
launched
• expected completion in
2019 (27 operational + 3
spare satellites)
• New feature: Search &
Rescue (SAR)
BeiDou (China)• 1st generation: 3 satellites
offering navigation
services to Chinese
costumers since 2000
• 2nd generation: 35
satellites by 2020
• Currently: 10 satellites

Global Positioning System

Global Positioning System• Originally 24 satellites (including
three spares) orbiting the earth every 12 hours at a height of 20.190 km.
• Monitor station → satellites:
– Monitoring the satellites from a number of widely distributed ground stations
– Master station analyses all the measurements and transmits the actual position to each of the satellites
• Satellites → user (at 50 bits/s):
– Time of transmission
– Ephemeris data: position of the satellite at any point in time
– Position of other satellites

Global Positioning System• We now have:
– From ephemeris:absolute position of satellite
– From time of transmission + receiver clock:range to satellite
• Solving for the position:
– 3 unknowns require 3 equations
• Remaining problem: clock accuracy
– Very expensive and accurate clock on satellite
– Very cheap and inaccurate clock on receiver
– Solution: use 4th satellite and use time error et_receive as 4th unknown.
• Improving accuracy:
– Using more than 4 satellites
( )receive transmitr t t c= −
1 2 3
1 2 3
1 2 3
1 2 3
, ,
S S S
S S S
S S S
S S S
x x xx
y y yy
z z zz
r r r
→
Position information
from 2 satellites
( )receivereceive transmit r t
r t t c e e c= − → =
1 2 3 4
1 2 3 4
1 2 3 4
1 2 3 4
, , ,
S S S S
S S S S
S S S S
S S S S
x x x x x
y y y y y
z z z z z
r r r r t
→
∆

Global Positioning System• Error sources:
– Atmospheric effects (dispersion)
• Path length through atmosphere
• Ionosphere
• Humidity (Troposphere)
– Multipath
• Buildings in cities
• High mountains
• Canyons
– Outdated ephemeris data
• Updated every 2 hours
– Relativity
• Time dilation
• Gravitational frequency shift
• Eccentricity effects
– Artificial
• “Selected Availability”, artificial time varying error
• Disabled
– Unfavorable geometry (GDOP)

Differential GPSPosition Position accuracy: typically from a few m to a few tens of cm

Assisted GPSPosition
• uses additional network resources to locate and use satellites in poor signal conditions
• improves start-up performance (time-of-first-fix TTFF)
• used extensively in GPS-capable cellular phones
u-blox, GPS Essentials of Satellite Navigation – Compendium, 2009

Underwater localization systems
• Underwater sensing nodes:
– Autonomous underwater vehicles (AUVs)
– Glider
– Drifter
• Underwater navigation:
– GPS does not work underwater!
– Alternative:
• Use GPS on surface
• Use surveyed acustic beacon network when submerged

Indoor Positioning
Systems

Selected Indoor Positioning Systems
• Laser-based indoor GPS
• Ultrasound (US) + radio frequency (RF) technology
• Infrared (IR) + RF technology
• Vision-based overhead system
• Impulse Radio Ultra Wide Band (IR-UWB)

Laser-Based Indoor (KPS)
rotating mirror
fixed mirrors
laser module
slave unit
master unit
mirror 1mirror 2mirror 3
• photodiodes on slave unit sense
pulses
• fixed mirrors project 3 consecutive
planes that scan the work space
• angles α and β computed from ∆tα,
∆tβ and Tmotor

Laser-Based Indoor (KPS)
• Performance: a few mm in position over 5x5 m arena, 25-50 Hz, a
few degrees in orientation
• Position available on the robot without com (GPS-like)
• Line-of-sight method
• Tested in 2D but extensible in 3D (2 laser base stations)

Ultrasound + Radio Technology
The “cricket” (le grillon)
• Principle: – All devices are the same except for a unique ID
– US emitter + data radio
– US pulse emission is synced with a radio broadcast
– Receiving node receives radio and US pulse
• Position computation:– Set of crickets → set of ranges = constraints
– Each node uses all available ranges
– Each node solves for the position of all crickets
1, 2( )
US RF SOS node nodet t v d− =

Infrared + Radio Technology
• Principle:
– belt of IR emitters (LED) and receivers (photodiode)
– IR LED used as antennas; modulated light (carrier 10.7 MHz)
– RF chip behind, measured RSSI
– Measure range & bearing of the next robot; can be coupled with RF channel (e.g. 802.11) for heading assessment
– Can also be used for 20 kbit/s com channel
[Pugh et al., IEEE Trans. on Mechatronics, 2009]

Infrared + Radio Technology
Performance summary:
• Range: 3.5 m
• Update frequency 25 Hz with 10 neighboring robots (or 250 Hz
with 2)
• Accuracy range: <7% (MAX)
• Accuracy bearing: < 9º (RMS)
• Possible extension in 3D, larger range (but more power) and better
bearing accuracy with more photodiodes (e.g. Bergbreiter, PhD
UCB 2008, dedicated asic, up to 15 m, 256 photodiodes, single
emitter with conic lense)

SwisTrack
• Tracking objects with one (or more) overhead cameras
• Active, passive, or no markers
• Open source software
multi-camera setup
single-camera setup

SwisTrack
• Absolute positions, available outside the robot/sensor
• Major issues: light, calibration
• Price per camera:CHF 100.- to 10000.-
Accuracy ~ 1 cm (2D)
Update rate ~ 20 Hz
# agents ~ 100
Area ~ 10 m2

IR-UWB Ubisense
fixed external sensors
emitter tag
• formerly known as pulse radio
• low energy, large bandwidth pulses
• do not interfere with narrowband
signals

IR-UWB Ubisense
• Tracking UWB tags
• Absolute positions, available outside the robot/sensor
• Multiple antennas
• Battery for 5 years
• 6 - 8 GHz UWB channel
• Price:EUR 13000.- base systemEUR 70.- / additional tag
Accuracy 15 cm (3D)
Update rate 40 Hz / tag
# agents ~ 10000
Area ~ 1000 m2

Traditional and Advanced
Instruments for
Environmental Monitoring –
On-going Mobile Sensor
Network Project

Mobile sensors (parasitic,
uncontrolled mobility) on public
transportation vehicles
Static wireless sensing
and communication
infrastructure
OpenSense
Community-driven, large-scale air pollution
measurement in urban environments
Sensorscope
Permasense

• 2% of all deaths (1.2 million people)
• 0.6% of burden of disease (DALY)
Urban air pollution
Global Health Risks, WHO 2009World Urbanization Prospects, U. N. 2008
Urban population will double in next decades
Motivation
• > 50% of world population already lives in cities
• rural population expected to stagnate or drop

Fine resolution air quality data is needed!
Enabling research in:• Human exposure
• Air Pollution Engineering
• Urban Planning
• Environmental Justice
• Public Policy
Public service & education• enable private users to make
informed decisions
• raising popular awareness
Motivation
Air pollution is highly location-
dependent• traffic chokepoints
• urban canyons
• industrial installations

Sparse networks of ground stations
Example: Switzerland’s NABEL (www.empa.ch/nabel)
• 16 stations
• specially selected sites
� urban with traffic
� urban residential
� suburban
� rural, etc.
• resolution:� high temporal
� low spatial
Mission: monitor air pollution on national level & gauge
impact of environmental policies
Public data access:
http://www.bafu.admin.ch/luft/luftbelastung/blick_zurueck/datenabfrage
Traditional Air Monitoring Systems
Ozone concentration
Station locations

Satellite-based remote sensing
Examples:• Measurements of Pollution in the Troposphere (MOPITT on Terra satellite)
• Ozone Measurement Instrument (OMI on Aura satellite)
Features:
• daily scans
• large coverage
• homogeneous quality
• sensitive to cloud coverage
• low resolution
Traditional Air Monitoring Systems
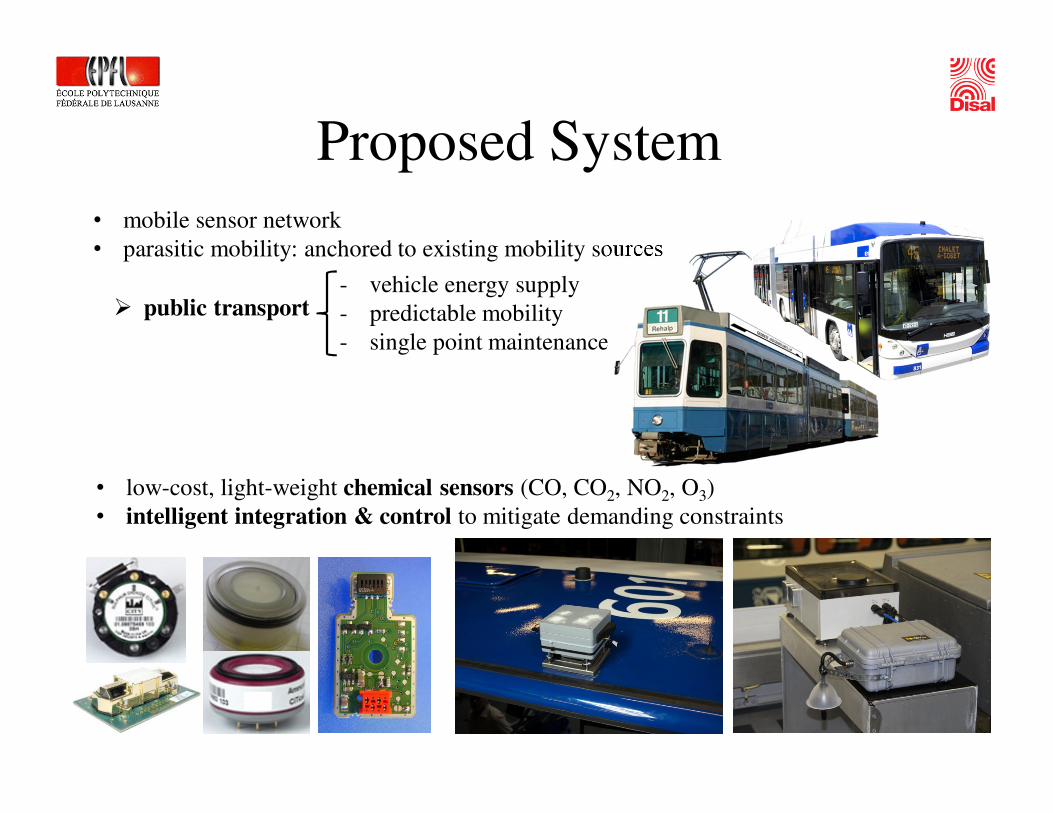
• mobile sensor network
• parasitic mobility: anchored to existing mobility sources
• low-cost, light-weight chemical sensors (CO, CO2, NO2, O3)
• intelligent integration & control to mitigate demanding constraints
- vehicle energy supply
- predictable mobility
- single point maintenance
� public transport
Proposed System

SENSING SYSTEMFrom many wireless, mobile,heterogeneous, unreliable rawmeasurements …
INFORMATION SYSTEM… to reliable, understandable and
Web-accessible real-time information
NA
NO
TE
RA
Nabel station Zürichstatic nodes
mobile nodes
GPRS
GPS
sensor network control
optimization of data acquisition
information dissemination
Proposed System

• Traditional approach
� Few stations
� Low resolution interpolated
estimates of pollutant
concentrations across massive
regions
• Recent results
� Massive deployment of stations (150)
at street-level (2008/2009 New York
City Community Air Quality Survey)
� Pollutants of interest heavily
concentrated along roads with high
traffic densities
Value of Dense Measurements

Global questions:
• More data, more noise, but also more redundancy
� Can we produce better quality data?
• Case study for other environmental phenomena:
� Radiation, noise, energy
Research directions:
• Wireless Sensor Network control
� When/Where to sample?
� What/To whom to transmit?
• Sensor Node design
� Sampling System
� Localization
� Software & hardware architecture
� Mechanical integration
Challenges
• Community sensing� privacy protection
� trustworthiness of data,
� relevance of data gathered and
information produced
• Modeling � sensor, device and mobility models
� air quality models
� privacy, trust & activity models

Gas Sampling System
Open sampling
• sensors directly exposed to environmental
measurand
Benefits:
• simple & “slim” solution
• continuous sampling
Drawbacks:
• no absolute concentration values
• noisy signal (sensitive to environment
variations: pressure, humidity)
Typical response:
Closed sampling
• sensors exposed to measurand inside controlled
chamber
• 3-phase strategy
Benefits:
• absolute measurements
• noise due to environment filtered
Drawbacks:
• complex & bulky
• non-continuous sampling
Typical response:
[Lochmatter 2010] [Trincavelli 2010]
Idea: Combine these two approaches to get the benefits of both systems.
Problem:Chemical sensors have very slow dynamics (example: Telaire 6613 CO2 sensor step response <2min)

• Smart sampling module
� possibly hybrid
� single/multi-chamber
� wind sensing
controlled flow
unclean
air
clean
air
open
closed
passive active
[Lochmatter et al. 2010]
[Gonzalez-Jimenez et al. 2011]
Current deployment
Gas Sampling System
[Lochmatter et al. 2010]
Anemometer

Robust localization – prerequisite for adaptive control
• exploits commercial state of the art u-blox LEA-6R GPS +
dead reckoning (DR) module
• augmentation with additional sensor modalities (compass,
accelerometer, gyro)
GPS only
GPS + DR
Localization

On TL bus no 601 @ NABEL station on Cesar Roux
• since June 2011
• testing mechanical & electronic integration
• since September 2011
• NABEL roadside station
• necessary for sensor calibration
Deployment Status Lausanne1 mobile plus 2 prototype stationary stations
• Measured parameters� NO2, CO (2 sensors), Humidity, Temperature, CO2 (only mobile station), GPS
• Power� Solar panel (stationary stations)
� Bus power (mobile station)
• Data� Transmission via GPRS to a central server
Outlook: 20 new stations to be deployed over the summer (new more modular architecture)

Deployment Status Zürich5 mobile plus 1 static station
On top of Tram 14
• 1st since July 2011
• 4 additional nodes since April 2012
@ NABEL station in Dübendorf
Originally calibrated
O3 sensor: correct
trend, but wrong
absolute value.
Calibration required.
• Measured parameters� CO, O3 (2 sensors), Humidity, Temperature,
Accelerometer (only mobile station), GPS
• Communication:
� GPRS, WLAN

Open Data Access
http://data.opensense.ethz.chhttp://opensensedata.epfl.ch:22002
Lausanne Zürich

Additional Literature – Week 11Books
• Weston J. and Titterton D, “Strapdown Inertial Navigation”, IET,
2005
• Siegwart R. and Nourbakhsh I. R., “Introduction to Autonomous
Mobile Robots”, MIT Press, 2004.
• Borenstein J., Everett H. R., and Feng L. “Navigating Mobile
Robots: Systems and Techniques”, A. K. Peters, Ltd., 1996.
• Everett H.R., Sensors for Mobile Robots, Theory and Applications”,
A. K. Peters, Ltd., 1995.
• u-blox, “GPS Essentials of Satellite Navigation – Compendium”,
2009, available online:http://www.u-blox.com/images/downloads/Product_Docs/GPS_Compendium%28GPS-X-02007%29.pdf