Embed Size (px)
Citation preview

Paravarzar Sh. et al. MOL Report Nine © 2018 309-1
Short-Term Underground Mine Planning: A Review
Shahrokh Paravarzar, Yashar Pourrahimian, and Hooman Askari-Nasab
Mining Optimization Laboratory (MOL)
University of Alberta, Edmonton, Canada
ABSTRACT
This paper reviews the state-of-the-art in short-term underground mine planning, which is critical for future mining activities. According to the literature, the research is conducted in the categories of mathematical programming optimization and discrete event simulation. Mathematical programming aims at minimizing an objective with the functionality of cost, makespan, deviation from a specific target such as tonnage and fleet management and scheduling. Mining simulation is widely applied in case of short-term mine planning, mostly based on modelling the internal mining process and parameters and on implementing a model for different case studies. A comprehensive review is provided for the aforementioned issues, commercial software packages and programming languages. Finally, research limitations and future area investigation are discussed. The studies reveal a deficiency of research based on the type of mining methods and incorporation of uncertainties.
1. Introduction and scope of the work
Mining is related to a series of operations that result in the extraction of materials from an orebody that is situated in a shallow deep up to a deep level from the surface. Although the conventional open-pit mining method is still used nowadays, in the near future the demand for mineral resources will increase and, consequently, underground mining will be the future challenge for mine industry as surperficial mines will be depleted (Camus, 1992; Nilsson, 1992; Fuentes, 2004; Fuentes and Caceres, 2004; Bakhtavar et al., 2009; Brown, 2012). As a result, more exploration will develop for providing access to deeper mineral resources. Deeper mining means more challenge in production rate, heat, more ventilation demand and higher production costs (Kaiser and Kim, 2009; Brown, 2012; Thrybom et al., 2015; Morrison, 2017).
Research has been conducted and many methods expended for open-pit mine planning problem in different levels of details during the past decades (Bozorgebrahimi et al., 2003; Osanloo et al., 2008; Newman et al., 2010; Moradi Afrapoli and Askari-Nasab, 2017; Blom et al., 2018). This is due to ease of access to these resources with a lower cost of extraction for the industry. Underground mining will be the next target of governments and the mineral industry in the next years, which are not accessible in a way that open-pit mining is. Accessing to more mining resource means deeper level for underground mining. Deeper underground mining operation due to its complexity and variety in extraction methods will be more complicated for production scheduling and extraction process (Hamrin et al., 2001; Hustrulid et al., 2001), so the mining companies will focus on decreasing the operating cost more than in the past.
There are several aspects of underground mining for which researchers provide a literature review. Vagenas et al. (1997) studied the mobile machine automation for underground mining. Logie and Matheson (1982) provided a review in the context of state of the art for pillar design. Peng and Tang (1984) research focused on underground support issues, providing a review of roof bolting support. Diamond and Schatzel (1998) examined the coalbed gas content determination methods for underground coal mining. Schnakenberg and Bugarski (2002) reviewed the new technologies for controlling the diesel emission for an underground
305

Paravarzar Sh. et al. MOL Report Nine © 2018 309-2
mine. Webber et al. (2003) assessed the heat stress problem using local and international indices. Alford et al. (2007) provided a study of the underground mine design problem considering infill drilling optimization, determining the cut-off grade, stop optimization, mine development network design, decline design and stop scheduling. Altun et al. (2010) provided a short analysis of the environmental impact of underground mining. Song et al. (2013) reviewed the real-time optimization of hard rock underground mining method using the tracking and communication tools for mine production and scheduling. Ralston et al. (2014) focused on mining automation area and investigated the role of automation technologies on safety, environmental sustainability, and production of underground coal mining process. Kang (2014) reviewed the recent development in the area of coal mining transportation and support. Four types of support were studied in their research including a high stressed roadway 1,000 m below the surface, a roadway surrounded by severely weak and broken rocks, a chamber surrounded by weak and broken rocks, and a roadway with very soft and swelling rocks. Khodayari and Pourrahimian (2015) studied mathematical programming optimization methods for block caving model with the purpose of production scheduling. Musingwini (2016) reviewed applied optimization techniques for underground mining method in four area of layout development, stop envelop size, production scheduling, and equipment selection and provided some suggestions for the development of 3D stochastic optimization models.
Surface mining is mostly restricted to open-pit while there are several underground mining methods with their specifications, which means a higher potential for conducting the research in this area for both long and short-term mine planning and the related challenges. In this paper, the aim is to review underground short-term mine planning.
The mining process will continue by the selection of an extraction method after data collection from an orebody. The next stage after geological, mineralogical and structural studies and combining them for resource/reserve estimation leads to the preliminary selection of potential mining methods and the scale of mining operations. Mine planning steps are completely affected by those stages as each planning has its considerations (Darling, 2011). The mine plan is highly dependent on the nature of the orebody; the uniquely most important parameter for mine selection method will always be the style and geological characteristics of the mineral deposit such as thin, steeply dipping tabular vein gold, or large, disseminated porphyry copper deposits. Other parameters are as follows:
Engineering properties of the mineral deposit and host rock mass
The required rate of production from mine (underground and open-pit)
Forecasts of mineral product value
Comparative study of mine operational cost and capital investment and mineral
Processing activities necessary to implement mine method
Availability, cost and skill level required for mining
Governmental and environmental and mine closure costs.
Two main parameters that classify underground mining methods are:
Basic deposit geometry
Support requirement necessary to mine stable stop or produce caving and ground problem.
Other factors such as environment, health and safety, cost, and output rate could be considered. Underground mining is divided into three broad classes: caving, stoping and other methods. Caving is referred to the controlled fragmentation of rocks due to the flow gravity, whereas the term stoping is the excavation of a stable opening of small or large dimensions. Underground mining methods are categorized by the following methods: room and pillar, stop-and-pillar, sublevel stope, shrinkage, cut-and-fill, timbered square set, longwall, sublevel caving (top slicing), block caving and panel caving (Hamrin, 1980; Brown, 2002; Brady and Brown, 2013).
306

Paravarzar Sh. et al. MOL Report Nine © 2018 309-3
In the next sections, a comprehensive review based on the mentioned methods is presented. In general, there has been a milestone in late 1990’s in this research area due to the increase of the computational capacity of the computers, so we divided the methods for the literature to before and after that date. In the first part, the focus is on the mathematical programming models and in the second part simulation approach is reviewed. In the third part, the simulation methods implemented for mine planning is reviewed.
2. Mathematical programming models
In mathematics, computer science and operations research, mathematical optimization refers to finding the best answer with mathematical modelling and programming with a purpose of providing a robust guideline for decision making using current information. In general, mathematical models consist of an objective function which must be optimized (in a sense that the function will be maximum or minimum) (Hillier, 2014). Furthermore, the method for solving a particular class of problem or model is known as an algorithm. In each model also some constraints refer to the availability of sources or natural constraints of the underlying problems (Williams, 2013).
The linear problem (LP), also called linear optimization, is a type of problem where an objective function is minimized or maximized by a linear function of decision variables (Dantzig and Thapa, 2006). Integer linear programming (ILP) or Integer programming is a mathematical programming model where all the variables are restricted to be integers (Karlof, 2005). Quadratic programming allows the objective function to have a quadratic form with linear constraints, that is a type of convex programming (Hildreth, 1957). Non-linear programming is a type of optimization problem whose objective function and/or constraints and inequalities or equalities are non-linear. Mixed-integer nonlinear programming (MINLP) refers to optimization problems with continuous and discrete variables and nonlinear functions in the objective function and/or the constraints (Bazaraa et al., 2013). Stochastic programs are mathematical programs where some of the data incorporated into the objective or constraints are uncertain. Uncertainty is usually characterized by a probability distribution of the parameters (Birge and Louveaux, 2011). Dynamic programming is referring to simplifying a complicated problem by breaking it down into simpler sub-problems in a recursive manner (Bellman, 2013). Multi-objective optimization (or a multi-criterion optimization problem) is a type of problem where the optimization depends on several objective functions (Deb, 2014). There are several other heuristic and metaheuristic methods, the definition of which is out of the scope of this paper. We refer the readers to Gendreau and Potvin (2010), Yang (2010) and Glover and Kochenberger (2006).
2.1. Mathematical programming (MP) for underground short-term mine planning
Mathematical programming is one of the most common approaches for solving mining problems by the minimization or maximization of an objective function. In this section, the mathematical optimization models that have purposed in literature are reviewed.
Muge and Pereira (1979) applied dynamic programming for sub-level stoping. The objective of the model was to minimize the deviation of the element (here working points) for optimal mining sequence. Geometric constraints within a level (the mutual relationship between the blocks) and mutual relationships between the levels are considered in the model.
Yun and Yegulalp (1983) simulated the transportation system using a network flows model for sublevel caving mining system to obtain the optimum system transportation cost (minimum-cost flow). The problem consists of two parameters that are costs and capacity. The cost included the cost of establishing the arc (opening and set-up cost) and the cost of the ore movement.
Chanda (1990) combined mixed integer programming and simulation for minimization of fluctuation between shifts in the extracted average grade. The method applied to continuous block cave mining.
307

Paravarzar Sh. et al. MOL Report Nine © 2018 309-4
Maximum production from raises in each shift, number of raises, profile constraint, slasher capacity and its availability is considered as a constraint for the model, but economic parameters are not considered in the model. The model output was the number and location of drawpoints for a shift, the tonnage that should be extracted, geology and depletion of the reserve.
LHD fleet management addresses three decision problems: dispatching, routing, and scheduling. Dispatching aims to choose, for one or many vehicles, a new destination (loading or dumping point). Routing consists in selecting the best route (road segments) from the origin to the destination. Finally, scheduling consists of deciding speeds and the waiting times of vehicles on road segments of a route to avoid conflicts between vehicles.
Vagenas (1991) solved the problem of dispatching and traffic control for remote-controlled (automatic) LHD using a graph theory for underground mining. The problem solved by considering the (two-way and one-way) unidirectional lane-segment considering the uncertainty of human operation. Data-driven search strategy applied to a solution. The graph theory problem was solved using Dijkstra’s shortest path for origin and destination considering the solution for collision and crossing for traffic zone. For dispatching process, the discrete simulation was implemented to model the operational fleet.
Sepulveda et al. (2005) modeled the LHD allocation with a constraint programming to provide support for task sequencing and vehicle scheduling problem in tunnel network in copper underground mine. Loading activates precede dumping activities (precedence constraint), and working side using that LHD should complete the tasks by one side and then start the task from other side are the model constraints.
Gamache et al. (2005) solved the fleet management problem in an underground mine with the shortest-path algorithm. The problem was solved for single-lane with bi-directional road and operational constraint for LHD statue for their buckets. The model restricted to deterministic parameters for service and travel time and just for one vehicle at a time, but integrated the three significant aspects of dispatching, routing and scheduling at the same time.
Beaulieu and Gamache (2006) applied an enumeration algorithm based on dynamic programming for solving fleet management. Enumeration algorithm presented based on dynamic programming for optimally solving the fleet management problem in underground mines. The objective was to find the best route and schedule for each vehicle in order to reach their destination in the shortest time while also avoiding conflicts on the haulage network. The focus of the study was on routing and scheduling bidirectional vehicles on a haulage network composed of one-lane road segments. The authors’ approach is capable of managing a fleet of four vehicles in less than a minute. Significant differences that an underground fleet management system must have in comparison to open-pit operations are also discussed. Vasquez et al. (2011) implemented an integer programming for LHD allocation to minimize the makespan of drift workload subject to operational constraints for underground copper mine (El-Teniente). The objective of the model resulted in a decision-making process for LHD operator. Constraints could be classified into two groups. The first category of constraints which forced the model to obey the logical path and other category satisfy the flow balancing such as drift entrance, side of drift, dumping site and the turning point of drift.
Irem (2011) developed a mathematical program using mixed integer programming to solve schedule problem of LHD vehicle for underground block caving mine. The objective of the model was minimizing the makespan. Problem modelled as a parallel machine scheduling problem that LHD considered as a parallel machine and LHD cycle to each drawpoint is a job schedule. Vargas Pincheira (2011) implemented a mixed integer programming (MIP) mathematical programming for medium to the short-term planning of room and pillar extraction to optimize the extraction sequence. As road-header used for extraction in mine, then the manoeuvre displacement for this kind of machine is difficult in production tunnel then consequently travel time for moving to another front for continue extraction is high. The following objectives were satisfied due to this optimization: (i) increase tons per day of material extracted from the deposit, (ii) decrease transfers for continuous excavation equipment, and (iii) decrease the extraction times of each panel.
308

Paravarzar Sh. et al. MOL Report Nine © 2018 309-5
Nehring et al. (2010) presented a dynamic mathematical model using mixed integer programming (MIP) for short-term production scheduling with the objective of minimizing the deviation from production target for each period on scheduling horizon for sublevel stoping operation. The model met the process plant feed for stable production quality as long as machine allocation constraints were satisfied for the sublevel stoping mine system. The objective of the mathematical model was minimizing deviation from target metal production. The model satisfied the shift base schedule and also machine allocation and reassignment while operational condition change. Model constraint consisted of target production rate balanced with the tonnage of metal produced across all machines from the primary blast, ore movement, blast block capacity, haulage shaft capacity, machine assignment limitation, machine capacity, ore movement throughput and orepass limit.
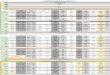
Leite-Corthésy (2016) presented a mixed integer linear program model for optimization of the production and development of a sub-level stoping underground mine on the basis of shifts of one week. The model minimized the deviation between the weekly mine plan all quarters of that same week. Besides this model in order to consider the uncertainty and probability simulation model run to assess these constraints. In the same way that short-term planning (week) aims to achieve the objectives of the medium-term planning (3 months), the very short-term model (shift, 10h) aims to achieve the goals of the weekly model. Thus, each quarter is planned to achieve the objectives of the week that depend on the medium-term objectives. They also provided another model with the same constraints but a different objective function (Leite-Corthésy et al., 2016). The objective function of the model defined as the minimization of operation hours in each site subject to each crew cannot provide more than 10 hours of operation, operation and non-operation time should not exceed more than weekly plan. Restrictions are considered between operation hours and weekly plan hours. Operation cannot be continued during the blasting hours. The model forced to finish the operation at each site completely in order to start the other. Table 1 summarizes the mathematical programming models that have been used for underground short-term mine planning. Table 2 shows the considered parameters for each model.
3. Underground mining simulation
Another approach for evaluating the short-term planning in an underground mine is a simulation of the mining process. Simulation is the imitation of the operation of a real-world process or system. It is a general term, and more specifically it could be directed to (Rossetti, 2015):
physical simulation for the physical objects,
continuous simulation which time evolves continuously,
discrete event simulation where specific events occur in a critical moment of time in a system,
stochastic simulation based on variables and process function based on Monte Carlo estimation using pseudo-random numbers.
Mining systems and activities are more fit to discrete events. For example, the LHD movement in underground mining process for haul and dump and loading a material could be simulated as a discrete event that occurs in a specific moment of time which may cause a change in a system.
The simulation method is used in the mining area for three general purposes:
1- Assessing the operational functionality of the system and system enhancement
2- Evaluate the development rate
3- Feasibility study and equipment selection.
As underground mining is a complicated process, discrete event simulation can be implemented in several mining processes with different goals. The following section summarizes the application of simulation in the mining operations.
309

Paravarzar Sh. et al. MOL Report Nine © 2018 309-6
Table 1. Summary of applied MP models in underground short-term mine planning
Author Model Model Objective(s) Mining Method Constraint
Muge and Pereira (1979) Dynamic programming Minimizing the deviation
sequence Sub-level stoping
Block precedence in extraction sequence
Precedence between levels
Yun and Yegulalp (1983) Graph Theory Minimizing transportation
cost Sub-level caving
Opening and set-up cost
Capacity
Chanda (1990) Simulation and MIP
Minimizing the deviation in the average production grade between operation
shift
Block Caving
Maximum allowable output per shift
Maximum allowable number of working drawpoints per shift
Declaration of exhaustion for exhausted drawpoints
Required grade for each shift (equality)
Tonnage blended ore in each shift
Sepulveda et al. (2005) Constraint Programming
(CP) Minimizing makespan in
working shift Block Caving
Loading and dumping activities
Working side
Gamache et al. (2005) Shortest Path and Dijkstra’s
algorithm Fleet management Conceptual model
Route traffic
Dispatching
Vehicle orientation and deadlock
Production target
Beaulieu and Gamache (2006)
Dynamic Programming (Enumerate tree)
Fleet management Conceptual model
Layout network
Homogeneous vehicles
Route and traffic condition and Collision
Vehicle orientation and deadlock
Vasquez et al. (2011) Integer Programming (IP) Minimizing the makespan
of drift workload Block Caving
Layout network
Extraction side
Flow balance
Vehicle orientation
Dispatching 310

Paravarzar Sh. et al. MOL Report Nine © 2018 309-7
Table 2. Continued
Irem (2011) Mixed integer Programming
(MIP) Minimizing the makespan Block Caving
Job schedule
Number of trucks
Number of LHD
Number of positions (Drawpoints)
Vargas Pincheira (2011) Mixed integer Programming
(MIP) Minimizing the roadheader
replacement Room and Pillar
Layout (Pillar’s position)
The direction of access to the blocks
Precedence of blocks
Translation cost of materials
Nehring et al. (2010) Mixed integer Programming
(MIP) Minimizing the deviation
from production target Sub-level caving
Machine capacity
Shift availability
Production capacity
Reserve availability
Ore grade
Leite-Corthésy (2016) Mixed integer Programming
(MIP) Maximizing mined tonnage
on a given time horizon Backfilled long-hole and
cut-and-fill.
Work hours available for a period of time
Available crew
Number of hours for backfill site
Available rock tonnage
Maximum possible tonnage extraction from mine, level, vein, site
Leite-Corthésy et al. (2016)
Mixed integer Programming (MIP)
Minimizing the deviation of short-term (shift) plan
from the weekly plan
Backfilled long-hole and cut-and-fill.
Number of crew
Crew working hours
Weekly operation hours
Shift operational hours
Exceeding and restriction of working operation hours
311

Paravarzar Sh. et al. MOL Report Nine © 2018 309-8
Table 3. Comparison of features present in short-term underground mathematical programming models
Authors
Sta
tus
of d
raw
poin
ts o
r fa
ce o
f ex
trac
tion
and
thei
r av
aila
bili
ty
Min
e ne
twor
k la
yout
Geo
met
rica
l lim
itat
ions
Blo
ck e
xtra
ctio
n pr
eced
ence
Ore
gra
de, t
arge
t, an
d bl
endi
ng
Mat
eria
l flo
w b
alan
ce
Wor
king
and
ext
ract
ion
side
Shi
ft a
vail
abil
ity
and
sche
dule
Dis
patc
hing
Mac
hine
and
tran
spor
tati
on
capa
city
(ty
pe, n
umbe
r, c
apac
ity)
Rou
te tr
affi
c
Veh
icle
ori
enta
tion
Pro
duct
ion
targ
et a
nd c
apac
ity
Mat
eria
l re-
hand
ling
cos
t
Muge and Pereira (1979) ✓ ✓
Yun and Yegulalp (1983) ✓ ✓ ✓
Chanda (1990) ✓ ✓
Sepulveda et al. (2005) ✓ ✓
Gamache et al. (2005) ✓ ✓ ✓ ✓
Beaulieu and Gamache (2006)
✓ ✓ ✓ ✓
Vasquez et al. (2011) ✓ ✓ ✓ ✓ ✓
Irem (2011) ✓ ✓ ✓
Vargas Pincheira (2011) ✓ ✓ ✓ ✓
Nehring et al. (2010) ✓ ✓ ✓ ✓ ✓
Leite-Corthésy (2016) ✓ ✓ ✓ ✓ ✓
Leite-Corthésy et al. (2016) ✓ ✓ ✓ ✓
312

Paravarzar Sh. et al. MOL Report Nine © 2018 309-9
3.1. Elderly computer-based simulation of the mining process
Touwen and Joughin (1972) presented a paper with the aim of simulating underground stoping and transport operation for a gold mine. Mining activities were simulated for large and small operation units. Stopes were simulated as a drilling and blasting process and transportation was simulated as a rail material movement process using scrapers. Simulation run for months in a unit of minutes.
Beckett et al. (1979) designed an LHD simulator called LHDSIM based on event-scheduling approach on Fortran computer language program. In this approach, a simulator searched for collision point specifically on intersection nodes on room and pillar mine layout. If the program determined the conflict, then LHD should wait on queue otherwise the time-lapse will be calculated for the machine. The time-lapse for LHD and non-LHD machine were different based on their intuitive movements. The LHSSIM program run for both deterministic and stochastic options. A physical layout such as cut depth width and distance between headings, cut height, density of material, tramming breakthrough, LHD operational parameters (bucket capacity, load, and discharge rate), continuous miner rate was considered in the program.
Steiker (1982) simulated the underground mining process using the system capacity (tons per day), track layout design, train fleet configuration and dispatching procedure using GPSS simulation computer language. Mine layout consisted of two independent production levels with rubber tired load-haul-dump and one haulage level operating using a train. Crusher and orepass locations were fixed in the system. Delays consisted of delay caused by queueing the trucks to the same train, truck repair or accessing the route by crew due to the right-of-way. Simulation run for one week, and the output consisted of tonnage production for each day, a number of trains dump, an average of queuing time per train, average round trip time per train, crusher utilization, and average queueing at the crusher.
Oberholzer and Hardman (1987) did a review for computer simulation to evaluate the production and conveyor belt transportation process for coal mining system. Programs were categorized by three generations of programs as historical databank data, simulation programs for planning, design or control purpose and tools for planning or management control. Based on databank historical data machine capacity and availability were responsible for production losses. It was also concluded that the mining operation method was a more valuable key factor rather than machine breakdown time in a system. FACESIM and COMSIM in 1984 applied for simulating the continuous room and pillar mining method. BELTSIM program was written for belt simulation and optimization. CUTSIM was another simulation part for cutting drum of the continuous miner, longwall shearer or another similar machine. The program predicted the pattern that particular cutting design cut the coal face by showing the average force level and the cyclic force level.
Litke et al. (1993) implemented SLAMII (a Simulation Language for Alternative Modeling) to determine the influence of mining factors and their interaction in a mining system on a scale of daily production. System infrastructure consisted of in-the-hole (ITH) drills, load-haul-dump (LHD), one train with different capacity (4 cars with 20% of availability, six cars with 80% of availability and 10 for tramming development) and one truck for backfilling. In a system drilling and blasting cycle occurred in a production stage then ore mucking and hauling carried on using a ramp system and orepass/ chute system and the material tramming using a train in a system. The boundary of the system was from extraction face up to crusher while crusher and hoisting system were not modelled. They assessed the bottleneck of the system, mucking and hauling and miscellaneous scenarios. The results showed that LHD return hauling system, number of drills and machine availability of the drill influenced the system.
Hunt (1994) modelled the ore transportation process using a computer simulation called SLAMSYSTEM using the SLAMII Fortran based language for Amax's Henderson molybdenum mine in Empire, Colorado. Ore movement and handling occurred by LHD and train system from drawpoints to deliver to the mill. The capacity of the LHD bucket, trains capacity and cycle time for
313

Paravarzar Sh. et al. MOL Report Nine © 2018 309-10
LHD and train, and crusher considered in the model. The model simulated for 24 hours (1440 min). Based on their process the simulation results suggested decreasing the number of LHD and increasing the number of trains.
Karami and Szymanski (1997) developed a simulation model called SLAM II and implemented it to evaluate the performance of an underground discontinuous hard rock mining transportation system. The objective of the simulation was determining the key components of the system that is controlled by the system output and performance. The SLAM II obtains a solution and considering the various scenarios also for those. Three stops fed one orepass in the model. Mine layout included only two ore bins and work cycle times of ore haulage activities were considered in the model. An optimum number of mine cars in order to reach a production target was obtained through the model.
Runciman et al. (1997) compared two systems for loading the haulage truck: a chute system and Load-Haul-Dump (LHD) loading system to load a haulage truck assessed in order to understand if the chute system could exceed the throughput of the haulage system or not. The results showed that the chute system could pass the current throughput when a system works with one or two trucks. Haulage distance bay pass area and location for the repaired area was considered in the model. The model was included in three categories of the LHD data, haulage track data and system data. For LHD, parameters were type of LHD, loading time, dumping time, load size per bucket and availability; for haulage truck type of haulage truck, chute loading time, dumping time, payload capacity per trip and availability and, for system data, chute capacity, operation schedule, number of track layout roadway grades on the ramps and tramming speed in each segment were the parameters considered in the model.
Runciman (1999) implemented the discrete simulation model for evaluating the developed automated mine equipment system. The purposed model (automate mine equipment) compared with a current model for 30 days based on possible shift for several objectives (short and long-term). Short-term objectives consisted of the limitation of future automated mining equipment, their throughput and analysis the effectiveness and long-term objectives included the future research for development and system analysis simulation of a subsystem such as navigation and material supply and usage of simulation of mine engineering issue. Eight different model compared with a benchmark mining equipment system consisting of cycle mining equipment system and semi-continuous mining equipment concept. The results illustrated that the throughput of the mining system increases up to 45% using an automated system.
3.2. Simulation for short-term underground mine planning
Bayer and Nienhaus (2000) designed a theoretical computer model written in C++ to simulate the capacity of a room and pillar operation. Geological and layout parameters were considered as an input for the model in addition to equipment specific data. The program calculated the best fitting design and mine sequence. Sensibility analysis performed for productivity versus seam height, length of cut, number of entries, specific cutting energy. The model reflected the real mining situation fairly.
Mcnearny and Nie (2000) modelled the conveyer belt haulage system for longwall underground coal mine. The model included the gathering belts, transfer belts, spillage, belt breakdown, time between belt breakdowns, and belt utilization, The model input included the length of each belt, the width of each belt, the cross-section of each belt, the speed of each belt, the density of coal, parameter for distribution of coal flow rate at each section, distribution of shuttle car arrival time, crusher discharge time, belt working time, belt down times, actual work time of each shift and number of replicate simulation. Using the simulation, a quantitative prediction for belt size and surge bin capacity were determined.
Roberts (2002) applied a computer simulation model for sub-level stoping mine in order to predict the operational performance. Considering the truck type, a number of truckloads and decline layouts, size of pass bay, queuing pattern, production capacity, simulation performed for preferred and non-preferred pass bay logic. Operational incidence such as unscheduled stoppages, vehicles breakdowns
314

Paravarzar Sh. et al. MOL Report Nine © 2018 309-11
or drawpoint blockages and interference to the passage of trucks in decline by another mobile plant such as graders, jumbos, and utility vehicles were not considered in the model constraints. Haulage shaft capacity, reserve capacity, machine trimming, and a number of allocated LHD are other constraints taken into account in the model. The results of the simulation showed that the pass bay size and spacing and high-payload were crucial parameters for the haulage system performance.
Saayman (2006) simulated a dispatching system with Matlab programming for an underground mine. The boundary of system defined from drawpoint which material handles by LHD until dumped into the crusher. Simulation run by the objective of analyzing the different scenarios for dispatching problem. Service time also considered for truck and LHD on workshop area. Collision rules and traffic condition considered in a system as just one LHD was allowed to travel at the same time in a tunnel. Their research followed several objectives. The first objective was maximizing the total tons produced and at the same time keeping the level of each drawing point extraction column equal. Another objective was to decrease the crusher shutdowns as few as possible. For this approach, it would be necessary that the trucks arrival time be equal in event space. They considered the hang-up frequency in the model according to historical data, and maintenance plan was not considered in simulation because the simulation just run for one week, but fuel consumption and refilling were considered in the model. Five strategies were considered for modeling the dispatching system. The base case was the common rule for visiting the drawpoints sequentially if the drawpoint was active as same as normal mining situation. In the second strategy if the LHD in one tunnel started from the first drawpoint, at the adjacent tunnel LHD would start from the furthest drawpoint. The third strategy was regarding the cost function and attempted to minimize the difference between the level of each drawpoint with the adjacent ones and keep the difference minimum. In the fourth strategy, the movement of LHD was similar to the base case, but just one truck moved around. This resulted in less shut down in the crusher and minimized the truck waiting time. In the last strategy, the LHD was not assigned just to the specific tunnel. The decision to assign LHD to each drawpoints was taken by minimization of the cost function. The available tunnel was the one such that there were not any LHD on that tunnel.
Rubio and Troncoso (2008) utilized the discrete event simulation to show how the operational interruption on drawpoints (secondary breakage and hang up frequency), production cross cut’s closure strategy and a number of secondary breakage crews could influence the productivity. The simulation model consisted of drawpoints, production cross cuts, orepass, chutes and haulage crosscuts and the operational entities were minerals, LHD, dump trucks, secondary crews and chutes reparation crews. Failure in each drawpoints and ore pass and chutes between the tonnage event distribution were independent of others. Mechanical failure was not considered in the model and just one LHD was allowed for work on each crosscut. The results showed that a higher number of secondary reduction crew would cause higher productivity and haulage crosscut productivity had a reverse relation with drawpoint failures.
Maldonado Meza (2009) modelled the integrated short-term production considering the mine, transport and plant production for calculating the capacity production on Division El Teniente of Codelco Chile. The model designed for a probabilistic production for isolated mine network flow. To this end, the model would be able to illustrate the effect of the maintenance program and a nominal capacity of mine equipment on integrated mining system. Operational failure of mine, transport, and mill were not considered in the model.
Pereira et al. (2010) developed a simulation model for room and pillar mining system with the objective of maximizing production from all coal faces from a given plan. The model validated for forecasting the daily ROM production. Complete production cycle system considered for modeling including providing support for the ceiling, cutting the coal layer, drilling the face, charging and exploitation, ventilation and cleaning the face by ore removal.
315

Paravarzar Sh. et al. MOL Report Nine © 2018 309-12
Fjellström (2011) studied the transportation cost of ore and waste material to the crusher and backfilling rooms in the underground Renström mine. Mine truck and highway trucks were two alternatives that they considered for the simulation model as highway trucks had less truck cycle but more failure time and mine trucks had a higher cycle time and less failure time. Simulation results demonstrated that using a mine truck would decrease the cost of production by 10-20%. The input of model data consisted of detailed schedule hours, machine working hours consisted of drilling, charger, loader, highway and mine truck, scaler, shotcrete, resin and cement bolt ring cement mixer and water truck. Delay and idle time were also considered for machines. Unscheduled maintenance times (for failures) and scheduled maintenance time (for service time) were considered in the model. A number of vehicles and capacities such as driving speed for loaded and unloaded in three positions of the flat surface, ramp up and down were set for the model.
Pop-Andonov et al. (2012) applied Arena simulation software to analyze the transportation cost for a hypothetical underground mine. Rail and truck transportation system were considered as a haulage system for their goal of taking into account the queuing rule for trucks.
Haviland and Marshall (2015) designed a fundamental model of mine ramp productivity for a haulage system. Under the fundamental assumption that there was not any randomness, the system converged to periodic behavior. The model also showed how with a less haulage capacity the system could have achieved the same productivity. The model did not consider the light vehicle traffic and identical vehicle assumed in the model. Vehicle speed, loading, and dumping were assumed fixed so declaration and acceleration were not considered. Passing bay is allowed and the delay associated with pulling in and out was not simulated. Discrete event simulation was used for this purpose.
Usmani et al. (2014) performed the discrete event simulation for LHD optimization in extraction level for block caving model. Extraction drifts, drawpoints, production rate, daily draw rate, LHD operation and orepass were considered as the simulation elements. Base case scenario along with four other scenarios modeled in their case in order to obtain the optimum number of LHD to meet the production target. Hang-ups were considered fix, and traffic network and road conditions were not considered in their model.
Sjödin (2015) implemented the SimMine as a simulation software to simulate and evaluate the development process and machinery in mine. Average face utilization determined by the number of available faces to be sure that enough face is available if mechanical failure or face block occur. Hours per block indicated the development rate and also showed the machine effective hours. A number of blasts were related to measuring production in mine. The total worked hours divided by the total shift hours showed the utilization of planned time. The total worked hours divided by total hours per year defined the utilization of total mine. The old dataset was used in order to be able to compare the results with the old data. Failure for the automate machine imported to the model as a probability distribution of occurrence for the model. Simulation runs for a Drill rig, Simba, bolters, and LHD’s. Average face utilization, an hour per blast, number of blasts, utilization of planned time and utilization of total time were the indicators of simulation and measured parameter.
Skawina et al. (2015) estimated the rate of ore handling from drawpoint to ore pass using the DSE on sublevel mining process. Two types of LHD (Diesel and electric Load-Haul-Dump (LHD) machine) with different capacities were considered as a loader in the model. Rock breaker was modelled as a waiting time in the dumping operation. In a case that LHD did not find a task then it would wait in a parking space for waiting for the next assignment. Lunches, times when the machine is functional but not working and movement of the machine to parking when going off for the break, and extension of drift after each blasting were included. Restriction for working in the production area was considered one or two for each. The simulation was performed by considering the machine size, tramming speeds, acceleration, deceleration, delay and shift break. The aim of simulation was to identify the fleet configuration with the closest production rate.
316

Paravarzar Sh. et al. MOL Report Nine © 2018 309-13
Greberg et al. (2016) considered a problem of ore transportation via orepass in comparison with the truck for deep mining system on sub-level cave mining system as production disturbances using orepass result into high cost and time for ore pass rehabilitation. Two simulation models were run. One for two sub-levels with two main production areas in each level which were located furthest away from the crusher, which required the largest number of trucks and longer cycle time; and the second one for analyzing the further increasing distance to the existing crusher at the main level. The model was run for seven different scenarios. Electric and diesel trucks were used for the model. LHD, truck and area availability and traffic disturbance were considered for the model as an input. A truck parameter consisted of truck types, capacity, loading time, dumping time, speed when empty and average speed when loaded. The results showed that haul truck could be a replacement for orepass when mining went deeper.
Fukui et al. (2016) modelled a distributed system by implementation of simulation with the aim of comparing the distributed system and LHD system to evaluate the productivity of the system. As Fukui et al. (2016) mentioned LHD was a de-facto standard machine as it was an excavator and transporter at the same time, for this reason, the load and unload heavy weights caused a lot of fuel consumption. Also increasing the capacity for and at the same time smoother operation required wider drifts. Installing the separated loader and transportation system could have a large impact on production. Productivity, cost, the rate of operation and maintainability were examined for the model. Multiple agents simulated transports and excavators motion and internal states on Matlab (MathWorks Inc., 2015).
Park et al. (2016) implemented a simulation model on GPSS/H simulation language to optimize a number of trucks dispatch with the objective of maximizing the production of an underground limestone mine. Parameters considered in the simulation were truck cycle time, number of trucks, crusher availability, working hours, dispatching time, the capacity of train and loader and waiting for discharge yard. According to the model, the optimized number of trucks was obtained.
Anani et al. (2017) implemented a simulation method to evaluate an optimal panel width selection that minimized unit mining costs and maximized the productivity considering the number of haulage units assigned to each continuous miners. One-way traffic network with stations that were representative of each face-cutting and feeder-breaker was considered in the model as a stationary source. In addition to that payload, the empty speed of LHD loading time, dumping time, battery change, loaded speed, the time between cuts and spotting time were considered in the model. The model run with two shifts, one for making cuts and repair the conveyer belt and continuous miner repair and the second one just for production. The simulation result could be summarizing in this way that for a specific operation there was an optimal panel width that maximized productivity. Also, an optimal panel width existed with a minimum cost.
Shelswell and Labrecque (2017) implemented the discrete event simulation for assessing the impact of a number of operators on the performance of truck haulage fleet. The boundary of simulation area consisted of ore from stopes and the generation of lateral waste from up-stream and dumping of material at the run-of-mine (ROM) pad and stockpile site on the surface. Sublevels were not considered in the simulation. Non-production days, maintenance events and random shutdowns were the parameters that suspended the haulage and underground activity. Daily base schedule considered for ore production and a schedule based shifts defined for trucks, underground operation, and surface activities. For haulage trucks traffic, queuing, load delay and shop bays and breakdowns were considered. Truck dispatching, loading, dumping and availability of trucks were also included in the model. Haulage productivity was simulated with and without a number of operators and truck availability.
Table 3 summarizes the simulation models that have been used for underground short-term mine planning. Table 4 shows the considered parameters for each simulation model.
317

Paravarzar Sh. et al. MOL Report Nine © 2018 309-14
Table 4. Summary of simulation models applied to underground short-term mine planning
Author Mining method Model Objective (s) Resolution and details Model parameter(s)
Touwen and Joughin (1972) Sub-level stoping Transport system evaluation Short-term (monthly) Scraping operation
Drilling and blasting
Support installation
Beckett et al. (1979) Room and pillar Productivity on mine haulage system
Short-term (shift) Extraction face physical parameter
Material density
LHD parameter, capacity, and cycle-time
Non-LHD parameter capacity and cycle-time
Dispatching and traffic rules
Steiker (1982) ----- Productivity and performance Short-term (weekly) System capacity (tons per day)
Track layout design,
Train fleet configuration
Dispatching procedure
Mine layout
Delay
Litke et al. (1993) ----- Assessing the influence of system drivers
Short-term (daily) In-the-hole (ITH) drills,
Load-haul-dump (LHD),
Train
318

Paravarzar Sh. et al. MOL Report Nine © 2018 309-15
Haulage system capacity
Machines availability
Hunt (1994) Block Caving Ore transportation process Short-term (daily) LHD transportation and capacity
Orepass
Train
Crusher
Karami and Szymanski (1997) Sub-level stoping Measuring output performance for transportation
Short-term (daily) Mine layout (stops, orepass, etc.)
Transportation and haulage configuration
Runciman et al. (1997) Conceptual model System performance evaluation Short-term (weekly) Type of LHD
Cycle time
Load size per bucket
Haulage availability
Operation schedule
Road condition
Runciman (1999) Crown pillar System performance od chute and orepass system
Long and Short-term (monthly)
Orepass configuration (Distance, location, and capacity)
Transportation capacity
Bayer and Nienhaus (2000) Room and pillar Production capacity Short-term (no-data) Geological parameters
Layout parameters (seam height, length of cut, number of entries, specific cutting energy)
Mcnearny and Nie (2000) Underground Coal Performance of conveyer belt as haulage system
Short-term (14 days) Belt capacity and parameters
Cross section of each belt
319

Paravarzar Sh. et al. MOL Report Nine © 2018 309-16
Belt speed
Coal density
Distribution of coal flow rate at each section
Distribution of shuttle car arrival time
Crusher discharge time,
Belt working time
Belt down times, actual work time of each shift
Roberts (2002) Sub-level stoping Operational performance Short-term (5 Shifts) Truck type
Number of truck loads
Decline layouts
Size of pass bay
Queuing pattern
Production capacity
Saayman (2006) Block Caving Maximization of total production tonnage Minimization of crusher shutdowns
Short-term (weekly) LHD and truck numbers
Drawpoint availability
Mine layout
Dispatching
Traffic rules
Crusher availability
LHD and trucks availability
Cave profile shape
Rubio and Troncoso (2008) Block Caving Operational interruption Short-term (yearly) Drawpoints and hang-ups
Production cross cuts,
320

Paravarzar Sh. et al. MOL Report Nine © 2018 309-17
Orepass
Chutes and haulage
Haulage system (LHD and Dump trucks)
Maldonado Meza (2009) Block Caving Integrated production (Mine to Mill)
Short-term (yearly) Mine network flow
Nominal capacity of mine equipment
Pereira et al. (2010) Room and Pillar Maximization of a production from all coal faces
Short-term (shift) Support process cycle time
Cutting the coal layer
Drilling the face
Charging
Exploitation,
Ventilation
Cleaning the face by ore removal
Fjellström (2011) Room and Pillar Transportation cost Short-term (two months) Detailed schedule hours and availability
Machine working hours
Cycle time for blasting and production
Production capacity
Activity times (Lunch break, preparation, run, etc.)
Backfilling
Ore and waste transport
Pop-Andonov et al. (2012) Conceptual model Transportation cost Short-term (no data) Truck dispatching system
321

Paravarzar Sh. et al. MOL Report Nine © 2018 309-18
Train for transport and flow of material movement
Ore bine and chute system
Haviland and Marshall (2015) Sub-level caving Sensibility analysis for traffic pattern
Short-term (Limited periods hundreds of second)
Haulage ramp parameters
Traffic flow policy
Delays, queuing, piggybacking
Priority entrance
Usmani et al. (2014) Block Caving Optimization of LHD proficiency Short-term (yearly) Extraction drifts
Drawpoints
Production rate
Daily draw rate
LHD operation
Orepass
Sjödin (2015) Cut and Fill Evaluation of development process
Short-term (shifts) Average face utilization
hours per blast
Number of blasts
Utilization of planned time
Utilization of total time
Skawina et al. (2015) Sublevel caving Estimation of the rate of ore handling
Short-term (shift) Haulage and loading equipment capacity
Ore pass capacity
Rock breaker
Mine layout
Greberg et al. (2016) Sublevel caving Sensibility analysis for ore pass and truck ore transport system
Short-term (daily) Truck type
Truck parameter
Cycle time
322

Paravarzar Sh. et al. MOL Report Nine © 2018 309-19
Traffic flow policy
Fukui et al. (2016) Conceptual model Evaluation of the productivity, rate, and cost of a system based on a distributed system
Distributed system Static driving performance of excavators
Concise drift path
Quasi-static driving performance of transporters
Static excavating and loading work
Queuing at drawpoints and ore passes
Dispatch of transporters to multiple drawpoints
Production
Park et al. (2016) Room and Pillar Maximization of the production Short-term (1000 days) Truck dispatch interval
Working hours
The capacity of each truck
Capacity of loader
Cycle time
Anani et al. (2017) Room and Pillar Minimization of unit mining costs and maximization of the productivity
Short-term (shift) Dispatching
Number of haulages
Maintenance time
Shelswell and Labrecque (2017) Sublevel caving Measuring the performance of truck haulage fleet
Daily-shifts Non-production days
maintenance events and random shutdowns
Shift schedule
Mine layout
Material handling
Dispatching
323

Paravarzar Sh. et al. MOL Report Nine © 2018 309-20
Table 5. Comparison of features present in simulation models in underground short-term mine planning
Aut
hors
Min
e la
yout
(D
ista
nce,
the
posi
tion
of
extr
acti
on p
oint
s, e
tc.)
Han
g-up
s an
d ex
trac
tion
poi
nt a
vaila
bili
ty
(fai
lure
s)
Geo
logi
cal p
aram
eter
(gr
ade,
den
sity
)
Min
e fl
ow n
etw
ork
and
Mat
eria
l flo
w a
nd
extr
acti
on r
ate
Tra
nspo
rtat
ion
and
haul
age
conf
igur
atio
n
Tra
nspo
rtat
ion
capa
city
(ty
pe, N
umbe
r, L
oad
size
, nom
inal
cap
acit
y fo
r L
HD
and
truc
ks)
Dis
patc
hing
and
pro
duct
ion
Tra
ffic
rul
es (
Que
uing
pat
tern
, pas
s ba
y, r
oad
and
ram
ps c
ondi
tion
)
Ava
ilabi
lity
of h
aula
ge a
nd t
rans
port
sys
tem
(w
orki
ng h
ours
, ava
ilabi
lity
and
perf
orm
ance
)
Ope
rati
onal
sch
edul
e, r
ate,
and
cap
acity
Bel
t and
con
veyo
r av
aila
bilit
y an
d fa
ilur
es
Bel
t and
con
veyo
r c
apac
ity
and
spee
d
Ore
pas
s an
d ch
ute
Cru
sher
dis
char
ge ti
me
and
capa
city
Sup
port
and
bac
kfil
ling
Fac
e bl
asti
ng o
r se
cond
ary
frag
men
tatio
n cr
ew p
erfo
rman
ce
Ore
and
was
te m
ater
ial r
e-ha
ndli
ng a
nd
stoc
kpili
ng
Ven
tila
tion
Ext
ra a
ctiv
ity ti
mes
(lu
nch
tim
e, o
f da
ys, c
rew
de
lay,
fue
l ref
illin
g et
c.,)
Ope
rato
r ex
peri
ence
Mai
nten
ance
tim
e
Obj
. Max
imiz
ing
prod
ucti
on
Obj
. Min
imiz
ing
cost
Mea
suri
ng o
pera
tiona
l an
d sy
stem
pe
rfor
man
ce
Mea
suri
ng m
ater
ial h
andl
ing
and
tran
spor
t pe
rfor
man
ce
Sen
sibi
lity
anal
ysis
Dev
elop
men
t pro
cess
Touwen and Joughin (1972)
✓
Beckett et al. (1979) ✓ ✓ ✓ ✓ ✓
Steiker (1982) ✓ ✓ ✓ ✓ ✓ ✓
Litke et al. (1993) ✓ ✓ ✓ ✓ ✓ ✓
Hunt (1994) ✓ ✓ ✓
Karami and Szymanski (1997)
✓ ✓ ✓
Runciman et al. (1997)
✓ ✓ ✓ ✓ ✓ ✓
Runciman (1999) ✓ ✓ ✓
Bayer and Nienhaus (2000)
✓ ✓ ✓
324

Paravarzar Sh. et al. MOL Report Nine © 2018 309-21
4. Other related research
Topal and Ramazan (2010) implemented a mixed integer programming (MIP) for minimizing the maintenance cost for the available truck fleet for an underground gold mining operation in Western Australia. Truck age (or age bins), period and critical bin hours were considered in the model. Total operation hours, total available hours, the age of truck at the end of each period and age bins category were considered as a constraint for the model.
Lashkari (2014) measured the performance of shuttle cars on two room and pillar and longwall mining system by measuring the duty cycle and driving cycle time for shuttle car. The goal of the research was to measure power and energy consumption of the various shuttle cares to work in different haulage operations. Parameters such as rolling resistance, grade resistance, utilization considered to determine haulage operation condition. The required power density for each duty cycle operation, and peak power density and peak power and the parameters of the haulage system for each part of the cycle were obtained by simulation.
Shelswell and Labrecque (2014) compared series and parallel conveyor-based material handling system using discrete simulation and static spreadsheet models. Average daily ore flow rates were calculated for both cases. The results showed that the random failures decreased the effectiveness of parallel conveyor. The static separated sheet generated a lower average daily ore flow rate for the series case and higher results for the parallel case in comparison with the discrete simulation.
Peng and Vayenas (2014) simulated the LHD failure using a genetic algorithm during the period of interest for underground mining. Simulations were generated for three and six months interval using the dataset collected from an underground mine in Sudbury, Ontario, Canada. The simulated data were validated by real-life data to evaluate the compatibility of algorithm dealing with the real-life data set.
Xiao-ping et al. (2015) simulated a surge bin capacity and its belt as a real-time continuous dynamic model. There were several failures for surge bin and, among them, only mechanical and electrical failure and empty bin were considered. A probability density function was obtained by the samples as a random variable and the maximum likelihood estimation method was used for making parameter estimation. According to the parameters, random variables were generated and the simulation run based on the generated random variables.
5. Material flow simulation
For those underground mining methods that the extraction occurs due to the draw and caving of materials such as block caving and sublevel caving the draw mechanism and the way that material moves inside the cave area could be critical. Movement of material and draw process play a major role on grade control and dilution entry, which could be forecast by different approaches.
6. Commercial tools and programming languages
6.1. Commercial tools
Underground Coal TALPAC simulates the process of longwall mining. It is programmed by RPM Global Mining Group. The software generates the shearer productivity, Armoured face conveyor (AFC) performance benchmarks and productivity performance (TALPAC, 2017).
MineSched™ aims to maximize productivity and profits for underground and surface mining for both long-term and short-term planning. MineSched generates a schedule for improving the site operational productivity and probability. In the case of underground mining MineSched planning the stop production considering the following constraints (MineSched, 2018):
325

Paravarzar Sh. et al. MOL Report Nine © 2018 309-22
Model material flow through ore passes, and material transport levels.
Drilling and blasting process and backfilling activities
Considering the scheduling production and development simultaneously
PC-BC (Personal Computer Block Caving) is a mine planning third-party software that generates a long to short-term mine plan schedule for block caving mining method. Cave Management System (CMS) developed for the daily production cave management system. CMS has an ability to monitor the system and LHD dispatch system by storing data in SQL database and providing an Excel interface. Beside the CMS, LSQ tools are designed for data reconciliation between the operational mine sample analysis and the slice files forecast (PCBC, 2018).
Pitram is fleet management and real-time mine control tools for underground and open-pit mining designed by MICROMINE Corporate. Material management tools use the real data such as mine design, survey, and production data in order to report the stockpile balance and metal stock throughput. Online and real-time data for fleet gathered through the network data. The objective of Pitram is to maximize the productivity (Micromine, 2018).
SimMine is a simulation tool for underground mine simulation, scheduling, and planning. Via importing the layout and mine design, time limits, predecessor, and priority the following parameters will obtain from simulation (SimMine, 2018):
Project scheduling, daily, weekly, monthly and yearly
Production parameters such as development rate and advance, for ore and waste
Resource management such as working time and utilization, breakdowns, etc.
Material handling issues such as material types and destinations
Cost per advance and developments, per mine area, per shift, per ton waste, etc.
Carlson underground mine software is suitable for room and pillar and longwall mining system. The software tries to reduce the idle time for the haulage system in order to maximize the productivity (Carlson, 2018).
Promine is a mining and geology software based on AutoCAD interface. It supports several mining methods such as Open stope, Room and pillar, Cut and fill, Block caving, Long hole, Shrinkage stoping, and Alimak Mining. In case of short-term planning, Promine generates a forecast for production using iGantt schedules (Promine, 2016).
Deswik is a software developer mining company which is provided in several extensions for long to short-term planning. In the case of short-term planning Deswik.Blend extension has an ability to manage and optimizes the martial handling and blending problem using CPLEX optimizer. Deswik.OPS provides a short-term schedule. The process can be controlled and captured using real-time data receiving from the operations (Deswike, 2018).
6.2. Simulation software and programming languages
General Purpose Simulation System (GPSS) developed by Geoffrey Gordon in IBM at the 1960s. The world is a model using the entities called Transactions moving Block in which each block is a line of code theta affects the transactions (Schriber, 1974). Later on, GPSS/H produced by Wolverine software cooperation. Use external routines in FORTRAN made execution of GPSS faster (Crain, 1997).
SLAM II is an Interactive Execution Environment (IEE) released in 1981 as a first simulation language to formulate a stem description implementing the event; the processor continues worldview (Reilly, 1991).
326

Paravarzar Sh. et al. MOL Report Nine © 2018 309-23
SIMAN is a general purpose simulation analysis program for modelling combined discrete-continuous systems introduced in 1982. Continuous model and change in a system model with algebraic or differential equations (Pegden, 1984).
OPTIMINE TM is a simulation software for underground mining. The software can model the mining process by considering the limitations and critical points in the layout. It uses the traffic-controlling tool TRAMTM a program developed by Cybercube. The software works based on AutoCAD design and also can be created by importing the mine design software such as Surpac. The software considers the operational interruptions such as hang-ups on forecasting the system (Puhakka, 2000).
AutoMod as one of the powerful general-purpose software on at its time introduced by AutoSimulations Inc. located in Bountiful, Utah, USA. This software can generate a three-dimensional simulation environment using animation. It is one of the software that is changing the hardcoding of the model to the CAD environment. This software specially generated with the aim of material-handling as long as it can implement for robotics, mechanical tool transfer system and special machinery (AutoMod, 2012).
WITNESS is a visual interactive simulation software the Lanner Group’s simulation software package for discrete and continuous simulation modelling. WITNESS provides access to Oracle, SQL Server, Access, etc., direct spreadsheet link in/out, XML. In addition to that this Windows-based provides a link to Microsoft VISIO and graphical CAD linkage application with a 3D visualization (Al-Aomar et al., 2015).
ProModel was introduced by ProModel Cooperation, with a capacity of adding the C or Pascal subroutine. ProModel simulation uses the point-and-click approach in a Windows environment by offering a virtually unlimited size of the model (Harrell and Price, 2003).
Arena produced by System Modeling Cooperation that is user-friendly simulation environment combining the modelling power and flexibility of SIMAN simulation language. The models create by drag and drop action using the module objects, which contains all the logic and process actions at the same time. The modules are accessible through the templates which are a group of the modules use for a specific approach. Arena contains a several third-party software such as input, output and process analyzer that provides more ability for data processing and generating several replications in some specific ways (Rossetti, 2015).
SimEvents is an event-driven discrete simulation extension package produced by MathWorks company as a part of Matlab software. It can be used for task timing, resource usage on the performance of systems for planning capacity, forecasting, and supply-chain management (MathWorks Inc., 2015).
Here we just reviewed those language programming or software which are used more frequently in the literature. For more information, we refer readers to Banks (1998) and Robinson (2004).
7. Shortcomings of the current methods and suggestion for future research
Based on the literature, short-term underground mine planning could be divided into two general areas: (i) mathematical programming optimization and (ii) simulation.
In the case of mathematical programming, most of the models are restricted to exact algorithms and more specifically mixed integer programming, graphs theory, dynamic programming and constraint programming. Models mostly aim to solve the fleet management problem in the context of mathematical programming. The model constraints are mostly restricted to items such as the location of face extraction, the capacity of production or dispatching layout and traffic rules, which are assumed static with a fixed value.
For the second group of research, discrete event simulation (DES) models are restricted to some simplified models to some extent. These models often consider the process from the station(s)
327

Paravarzar Sh. et al. MOL Report Nine © 2018 309-24
(extraction or drawpoints, bin or chutes) to the destination that is conveyor entrance. The objective is mostly an evaluation of the system and measuring the performance rather than optimization of an objective function. The main advantages of DES are that it can generate a model with a different level of details and complexity considering the stochasticity for a dynamic system (Sharma, 2015). Solving and optimization of such models (systems) where the status of the system changes over time is a difficult task by using mathematical programming.
Underground mining consists of a wide range of extraction methods, each with their intrinsic complexity in their system due to the method of extraction. In some cases, such as the block caving method, the extraction point remains fixed until the end of the operation, but in some others such a cut-and-fill method the layout will not remain fixed and, consequently, the distance between the stations will change. This dynamical inheritance of mine operation could have a direct effect on the effectiveness of mining operation and haulage system performance.
Geological or geometallurgical uncertainty plays a significant role while the quantity and quality of materials are important. The existence of deleterious materials affects the production parameters. As a result, geological uncertainty should be incorporated into the models, considering that ore blending and ore inventory will take more significant place on the models to meet the specific characteristic of the materials that are required as a feed for mineral processing.
During the operation, there are several plans and operational actions that are commenced or run in parallel to the short-term plan which may link to short-term plan or affect the implementation of the plan, which results on increasing the Project OPEX (operating expenditure). The maintenance plan is an essential plan that is connected directly to operational activities. Part of the maintenance plan is a fix time inspection of the haulage, transportation or material handling. There are random failures in different parts of the system, which directly require attention to the maintenance section and their crews. The failure of the system in different parts could be evaluated with different parameters finding initial application in manufacturing and industrial engineering. The tools include process capability and performance indices, six-sigma, Taguchi’s Quality Loss Function (QLF) and more (Taguchi et al., 2005; Kenzap and Kazakidis, 2013). Different kinds of risks could be quantified based on methods such as Internal Failure Cost (IFC) and External Failure Cost (EFC) processes (Kenzap and Kazakidis, 2013).
In addition to geological, layout change and haulage system uncertainties, the effect of external uncertainties on downstream could aggregate to the mine plan. Several failures in mill processing or simulation of material processing could incorporate with the mine output results. Supply and demand in mining chain is another parameter in downstream which may affect the production plan from small-scale range up to long range scale.
8. Conclusions
Short-term mine planning was reviewed for underground mining. The existing literature in the area of mine simulation illustrated that the underground mining area is an environment with several dynamic parameters. These dynamic parameters eventuate from a verity of sources into the model. These sources are random such as LHD failures, or scheduled such as the periodic inspection of the conveyor belt. The linkage between a low-resolution plan (long-term scheduling) to a very high-resolution plan (daily schedules) is an essential area of research that is mostly neglected in the literature. It can be seen that mathematical programming is not dynamic enough to deal with a dynamic system. Therefore, one solution could be the implementation of mathematical modelling in combination with simulation models to improve the ability of models for using them in the simulation model. Each model focuses on simulating a specific boundary of the system (mostly inside the mine). The more extended boundary for the mining system could be more comprehensive and include more aspects of the real operations chain. Mining operation is not only about discrete events, which means that a combination of discrete and continuous simulation can result in more realistic results.
328

Paravarzar Sh. et al. MOL Report Nine © 2018 309-25
9. Acknowledgements
The authors acknowledge the funding by the Chilean Commission for Scientific and Technological Research, through Project CONICYT PIA Anillo ACT1407, and also extend their thanks to the Mining Optimization Laboratory (MOL) and Mining and Rock Science Development and Innovation Lab (MRDIL), University of Alberta teams and researchers for providing the resources and guidelines to developing this research.
10. References
[1] Al-Aomar, R., Williams, E. J., and Ulgen, O. M. (2015). Process simulation using witness. John Wiley & Sons,
[2] Alford, C., Brazil, M., and Lee, D. H. (2007). Optimisation in underground mining. in Handbook of operations research in natural resources, Springer, pp. 561-577.
[3] Altun, A. O., Yilmaz, I., and Yildirim, M. (2010). A short review on the surficial impacts of underground mining. Scientific research and essays, 5 (21), 3206-3212.
[4] Anani, A., Awuah-Offei, K., and Hirschi, J. (2017). Application of discrete event simulation in optimising coal mine room-and-pillar panel width: a case study. Mining Technology, 126 (1), 1-9.
[5] AutoMod (2012). AutoModDatasheet.
[6] Bakhtavar, E., Shahriar, K., and Oraee, K. (2009). Transition from open-pit to underground as a new optimization challenge in mining engineering. Journal of Mining Science, 45 (5), 485.
[7] Banks, J. (1998). Handbook of simulation: principles, methodology, advances, applications, and practice. John Wiley & Sons.
[8] Bayer, A. and Nienhaus, K. (2000). Capacity model for room and pillar operations with continuous miners. University of Technology, Aachen.
[9] Bazaraa, M. S., Sherali, H. D., and Shetty, C. M. (2013). Nonlinear programming: theory and algorithms. John Wiley & Sons.
[10] Beaulieu, M. and Gamache, M. (2006). An enumeration algorithm for solving the fleet management problem in underground mines. Computers & Operations Research, 33 (6), 1606-1624.
[11] Beckett, L., Haycocks, C., and Lucas, J. (1979). LHDSIM—A Load-Haul-Dump Simulator for Room-and-Pillar Mining Operations. in Proceedings of Proceedings 16th APCOM Symposium, pp. 408-413.
[12] Bellman, R. (2013). Dynamic programming. Courier Corporation.
[13] Birge, J. R. and Louveaux, F. (2011). Introduction to stochastic programming. Springer Science & Business Media.
[14] Blom, M., Pearce, A. R., and Stuckey, P. J. (2018). Short-term planning for open-pit mines: a review. International Journal of Mining, Reclamation and Environment, 1-22.
[15] Bozorgebrahimi, E., Hall, R., and Blackwell, G. (2003). Sizing equipment for open-pit mining–a review of critical parameters. Mining Technology, 112 (3), 171-179.
[16] Brady, B. H. and Brown, E. T. (2013). Rock mechanics: for underground mining. Springer science & business media.
[17] Brown, E. T. (2002). Block caving geomechanics.
[18] Brown, E. T. (2012). Progress and challenges in some areas of deep mining. Mining Technology, 121 (4), 177-191.
329

Paravarzar Sh. et al. MOL Report Nine © 2018 309-26
[19] Camus, J. (1992). Open-pit optimization considering an underground alternative. in Proceedings of Proceedings of 23th International APCOM Symposium, pp. 435-441.
[20] Carlson (2018). Carlson Underground Mining — For Precise Design, Scheduling, and Mapping.
[21] Chanda, E. C. K. (1990). An application of integer programming and simulation to production planning for a stratiform ore body. Mining Science and Technology, 11 (2), 165-172.
[22] Crain, R. C. (1997). Simulation using GPSS/H. in Proceedings of Proceedings of the 29th conference on Winter simulation, IEEE Computer Society, pp. 567-573.
[23] Dantzig, G. B. and Thapa, M. N. (2006). Linear programming 1: introduction. Springer Science & Business Media.
[24] Darling, P. (2011). SME mining engineering handbook. Vol. 1, SME.
[25] Deb, K. (2014). Multi-objective optimization. in Search methodologies, Springer, pp. 403-449.
[26] Deswike (2018). Deswike.
[27] Diamond, W. P. and Schatzel, S. J. (1998). Measuring the gas content of coal: a review. International Journal of Coal Geology, 35 (1-4), 311-331.
[28] Fjellström, N. (2011). Simulation of an Underground Haulage System, Renström Mine, Boliden Mineral. Student thesis Thesis, Pages 75.
[29] Fuentes, S. (2004). Going to an underground (UG) mining method. in Proceedings of Proceedings of MassMin Conference, pp. 633-636.
[30] Fuentes, S. and Caceres, S. (2004). Block/panel caving pressing final open-pit limit. CIM Bulletin, 97 (1082), 1-3.
[31] Fukui, R., Kusaka, K., Nakao, M., Kodama, Y., Uetake, M., and Kawai, K. (2016). Production analysis of functionally distributed machines for underground mining. International Journal of Mining Science and Technology, 26 (3), 477-485.
[32] Gamache, M., Grimard, R., and Cohen, P. (2005). A shortest-path algorithm for solving the fleet management problem in underground mines. European journal of operational research, 166 (2), 497-506.
[33] Gendreau, M. and Potvin, J.-Y. (2010). Handbook of metaheuristics. Vol. 2, Springer.
[34] Glover, F. W. and Kochenberger, G. A. (2006). Handbook of metaheuristics. Vol. 57, Springer Science & Business Media.
[35] Greberg, J., Salama, A., Gustafson, A., and Skawina, B. (2016). Alternative Process Flow for Underground Mining Operations: Analysis of Conceptual Transport Methods Using Discrete Event Simulation. Minerals, 6 (3), 65.
[36] Hamrin, H. (1980). Guide to Underground Mining Methods and Applications. Atlas Copco.
[37] Hamrin, H., Hustrulid, W., and Bullock, R. (2001). Underground mining methods and applications. Underground mining methods: Engineering fundamentals and international case studies, 3-14.
[38] Harrell, C. R. and Price, R. N. (2003). Simulation modelling using promodel technology. in Proceedings of Proceedings of the 35th conference on Winter simulation: driving innovation, Winter Simulation Conference, pp. 175-181.
[39] Haviland, D. and Marshall, J. (2015). Fundamental behaviours of production traffic in underground mine haulage ramps. International Journal of Mining Science and Technology, 25 (1), 7-14.
[40] Hildreth, C. (1957). A quadratic programming procedure. Naval Research Logistics (NRL), 4 (1), 79-85.
330

Paravarzar Sh. et al. MOL Report Nine © 2018 309-27
[41] Hillier, F. (2014). Introduction to Operations Research.
[42] Hunt, C. (1994). Simulation model of ore transport at the Henderson mine. Computers & Geosciences, 20 (1), 75-84.
[43] Hustrulid, W. A., Hustrulid, W. A., and Bullock, R. C. (2001). Underground mining methods: Engineering fundamentals and international case studies. SME.
[44] Irem , O. P., Mizrak Ozfirat;M. Kemal, Ozfirat;. (2011). A Mathematical Modeling Approach for Scheduling Problem of Load-Haul-Dump Vehicles in Underground Mining. in Proceedings of Northeast Decision Sciences Institute Meeting, pp. 1136-1143.
[45] Kaiser, P. and Kim, B. (2009). Rock mechanics challenges in underground construction and mining.
[46] Kang, H. (2014). Support technologies for deep and complex roadways in underground coal mines: a review. International Journal of Coal Science & Technology, 1 (3), 261-277.
[47] Karami, A. and Szymanski, J. (1997). A simulation model of an underground mine haulage system. Mineral Resources Engineering, 6 (04), 229-238.
[48] Karlof, J. K. (2005). Integer programming: theory and practice. CRC Press.
[49] Kenzap, S. A. and Kazakidis, V. N. (2013). Operating risk assessment for underground metal mining systems: overview and discussion. International Journal of Mining and Mineral Engineering, 4 (3), 175-200.
[50] Khodayari, F. and Pourrahimian, Y. (2015). Mathematical programming applications in block-caving scheduling: a review of models and algorithms. International Journal of Mining and Mineral Engineering, 6 (3), 234-257.
[51] Lashkari, H. (2014). Duty Cycle Study of Coal Mine Shuttle Cars.
[52] Leite-Corthésy, R. (2016). Vérification d'un plan de production minier à court terme par simulation.Thesis, Ecole Polytechnique, Montreal (Canada).
[53] Leite-Corthésy, R., Gamache, M., and Baptiste, P. (2016). Validation D’un Plan De Prodution Minier À Cour Terme Par Simulation. in 11th International Conference on Modeling, Optimization and Simulation - MOSIM’16. Montréal, Québec, Canada.
[54] Litke, L., Laroche, D., Strong, D., and Szymanski, J. (1993). A computer simulation model of underground production mining: A tool for benchmarking. Proc 24th APCOM.
[55] Logie, C. V. and Matheson, G. M. (1982). A critical review of the current state-of-the-art design of mine pillars. in Proceedings of Proceedings of the 1st International Conference on Stability in Underground Mining, Vancouver, BC, Canada, pp. 16-18.
[56] Maldonado Meza, J. L. (2009). Modelo de Planificación Integrado Mina-Transporte-Planta División El Teniente Codelco Chile.
[57] MathWorks Inc. (2015). SimEvents Toolbox: User's Guide (R2015a).
[58] Mcnearny, R. L. and Nie, Z. (2000). Simulation of a conveyor belt network at an underground coal mine. Mineral Resources Engineering, 9 (03), 343-355.
[59] Micromine (2018). Pitram Fleet Management and Mine Control Solution.
[60] MineSched (2018). GEOVIA MineSched™ production scheduler - great results with proven technology.
[61] Moradi Afrapoli, A. and Askari-Nasab, H. (2017). Mining fleet management systems: a review of models and algorithms. International Journal of Mining, Reclamation and Environment, 1-19.
[62] Morrison, D. (2017). Meeting the productivity challenge below 2.5 kilometres. in Proceedings of Proceedings of the First International Conference on Underground Mining Technology, Australian Centre for Geomechanics, pp. 3-8.
331

Paravarzar Sh. et al. MOL Report Nine © 2018 309-28
[63] Muge, F. and Pereira, H. G. (1979). Short-term planning in sublevel stoping methods. in Proceedings of 16 th International Symposium on the Application of Computers and OR in the Mineral Industry. Ed TJ O’Neil, pp. 323.
[64] Musingwini, C. (2016). Optimization in underground mine planning-developments and opportunities. Journal of the Southern African Institute of Mining and Metallurgy, 116 (9), 809-820.
[65] Nehring, M., Topal, E., and Knights, P. (2010). Dynamic short-term production scheduling and machine allocation in underground mining using mathematical programming. Mining Technology, 119 (4), 212-220.
[66] Newman, A. M., Rubio, E., Caro, R., Weintraub, A., and Eurek, K. (2010). A review of operations research in mine planning. Interfaces, 40 (3), 222-245.
[67] Nilsson, D. (1992). Surface vs. underground methods. SME Mining Engineering Handbook.
[68] Oberholzer, J. and Hardman, D. (1987). A Review of Computer Simulation and Other Programs Developed and Used by the Coal Mining Laboratory, Chamber of Mines Research Organization. in Proceedings of APCOM, pp. 358-366.
[69] Osanloo, M., Gholamnejad, J., and Karimi, B. (2008). Long-term open-pit mine production planning: a review of models and algorithms. International Journal of Mining, Reclamation and Environment, 22 (1), 3-35.
[70] Park, S., Choi, Y., and Park, H.-s. (2016). Optimization of truck-loader haulage systems in an underground mine using simulation methods. Geosystem Engineering, 19 (5), 222-231.
[71] PCBC, (2018). GEOVIA PCBC Leading block cave planning and scheduling application.
[72] Pegden, C. D. (1984). Introduction to SIMAN. in Proceedings of the 16th conference on Winter simulation. Dallas, TX: IEEE Press, pp. 34-41.
[73] Peng, S. and Vayenas, N. (2014). Maintainability analysis of underground mining equipment using genetic algorithms: Case studies with an LHD vehicle. Journal of Mining.
[74] Peng, S. S. and Tang, D. H. Y. (1984). Roof bolting in underground mining: a state-of-the-art review. International Journal of Mining Engineering, 2 (1), 1-42.
[75] Pereira, S. P., Costa, J. F. C. L., Salvadoretti, P., and Koppe, J. C. (2010). Simulação de produção em mina subterrânea de carvão com uso de conjuntos mecanizados. Rem: Revista Escola de Minas, 63 581-589.
[76] Pop-Andonov, G., Mirakovski, D., and Despodov, Z. (2012). Simulation Modeling and Analyzing in Underground Haulage Sistems with Arena Simulation Software. International Journal for Science, Technics and Innovations for the Industry MTM (Machines, Technologies, Materials), 48-50.
[77] Promine (2016). Promine mining and geology software.
[78] Puhakka, T. k., V (2000). Use of OPTIMINETM Simulation Tool for Mobile Fleet Selection. in MassMin 2000. brisbane,Qld, pp. 145-148.
[79] Ralston, J., Reid, D., Hargrave, C., and Hainsworth, D. (2014). Sensing for advancing mining automation capability: A review of underground automation technology development. International Journal of Mining Science and Technology, 24 (3), 305-310.
[80] Reilly, J. J. O. (1991). SLAM II tutorial (simulation language). in Proceedings of 1991 Winter Simulation Conference., pp. 112-117.
[81] Roberts, B. (2002). Computer simulation of underground truck haulage operations. Mining Technology, 111 (2), 123-128.
[82] Robinson, S. (2004). Simulation: the practice of model development and use. Wiley Chichester.
[83] Rossetti, M. D. (2015). Simulation modelling and Arena. John Wiley & Sons.
332

Paravarzar Sh. et al. MOL Report Nine © 2018 309-29
[84] Rubio, E. and Troncoso, S. (2008). Discrete events simulation to integrate operationalinterruption events in block cave production scheduling. in Proceedings of Proceedings ofthe 3rd International Conference on Mining Innovation.
[85] Runciman, N., Vagenas, N., and Corkal, T. (1997). Simulation of Haulage Truck LoadingTechniques in an Underground Mine Using WITNESS. SIMULATION, 68 (5), 291-299.
[86] Runciman, N. A. (1999). Evaluation of underground mining equipment systems usingdiscrete-event simulation with animation. Laurentian University, Sudbury, Canada.
[87] Saayman, F. (2006). Optimization of an autonomous vehicle dispatch system in anunderground mine. Journal of the Southern African Institute of Mining and Metallurgy, 106(2), 77-86.
[88] Schnakenberg, G. H. and Bugarski, A. D. (2002). Review of technology available to theunderground mining industry for control of diesel emissions.
[89] Schriber, T. J. (1974). Simulation using GPSS. MICHIGAN UNIV ANN ARBOR.
[90] Sepulveda, J. M., Córdova, F., Quezada, L., Olivares, V., Hernandez, L., and Atero, L.(2005). A constraint-programming model for scheduling vehicles in underground miningoperations. in Proceedings of 18th International Conference on Production Research.
[91] Sharma, P. (2015). Discrete-event simulation. International journal of scientific &technology research, 4 (4), 136-140.
[92] Shelswell, K. and Labrecque, P. (2014). Discrete Simulations Quantifying the Effects ofMaterial Handling Conveyors in Series or Parallel Ore flow Streams. in Proceedings ofSociety for Mining, Metallurgy and Exploration Annual Meeting, Salt Lake City, Utah, USA,pp. 7.
[93] Shelswell, K. J. and Labrecque, P. O. (2017). Discrete simulations modelling the impact ofoperator numbers and truck availability on haulage fleet productivity. in Proceedings of theFirst International Conference on Underground Mining Technology, M. Hudyma and Y.Potvin, Eds. Sudbury: Australian Centre for Geomechanics, pp. 677-688.
[94] SimMine (2018). SimMine® Development Package.
[95] Sjödin, E. (2015). Evaluation of Mining Automation with Production Simulation.
[96] Skawina, B., Salama, A., Greberg, J., and Schunnesson, H. (2015). Production ratecomparison using different Load-Haul-Dump fleet configurations: Case study fromKiirunavaara Mine. in Proceedings of Mine Planning and Equipment Selection.
[97] Song, Z., Rinne, M., and Van Wageningen, A. (2013). A review of real-time optimization inunderground mining production. Journal of the Southern African Institute of Mining andMetallurgy, 113 (12), 889-897.
[98] Steiker, A. (1982). Simulation of an underground haulage system. Application of Computersand Operations Research in the Mineral Industry (APCOM), Denver.
[99] Taguchi, G., Chowdhury, S., and Wu, Y. (2005). Taguchi's quality engineering handbook.Vol. 1736, Wiley Online Library.
[100] TALPAC (2017). Underground Coal TALPAC v3.0 c.
[101] Thrybom, L., Neander, J., Hansen, E., and Landernas, K. (2015). Future Challenges ofPositioning in Underground Mines. IFAC-PapersOnLine, 48 (10), 222-226.
[102] Topal, E. and Ramazan, S. (2010). A new MIP model for mine equipment scheduling byminimizing maintenance cost. European Journal of Operational Research, 207 (2), 1065-1071.
[103] Touwen, F. and Joughin, N. (1972). The simulation of underground stoping and transportoperations in gold mining. Application of computer methods in the mineral industry:proceedings of the tenth international symposium. Johannesburg–South Africa, 10-14.
333

Paravarzar Sh. et al. MOL Report Nine © 2018 309-30
[104] Usmani, T., Szymanski, J., and Apel, D. (2014). Optimisation of LHDs operation at theextraction level in a block cave project. International Journal of Mining and MineralEngineering, 5 (2), 138-151.
[105] Vagenas, N. (1991). Dispatch control of a fleet of remote-controlled/automatic load-haul-dump vehicles in underground mines. International Journal of Production Research, 29(11), 2347-2363.
[106] Vagenas, N., Scoble, M., and Baiden, G. (1997). A review of the first 25 years of mobilemachine automation in underground hard rock mines. CIM Bulletin, 90 (1006), 57-62.
[107] Vargas Pincheira, F. J. (2011). Desarrollo de un Modelo de Programación Matemática parala Planificación de la Extracción Minera de Corto Plazo en una Empresa de la MedianaMinería.
[108] Vasquez, O. C., Sepúlveda, J. M., and Córdova, F. (2011). Modeling and optimization ofvehicle operations in underground copper mining. Rem: Revista Escola de Minas, 64 365-371.
[109] Webber, R., Franz, R., Marx, W., and Schutte, P. (2003). A review of local and internationalheat stress indices, standards and limits with reference to ultra-deep mining. Journal-SouthAfrican Institute of Mining and Metallurgy, 103 (5), 313-324.
[110] Williams, H. P. (2013). Model Building in Mathematical Programming. Wiley.
[111] Xiao-ping, B., Yu-hong, Z., and Ya-nan, L. (2015). A novel approach to study real-timedynamic optimization analysis and simulation of complex mine logistics transportationhybrid system with belt and surge links. Discrete Dynamics in Nature and Society.
[112] Yang, X. S. (2010). Engineering optimization. Wiley Online Library.
[113] Yun, Q. and Yegulalp, T. (1983). Optimization of underground transportation systems usinga network flows model. International Journal of Mining Engineering, 1 (3), 267-275.
334