Embed Size (px)
Citation preview

Mechanics of Materials 38 (2006) 430–462
www.elsevier.com/locate/mechmat
Shape memory alloys, Part II: Modeling of polycrystals
Dimitris C. Lagoudas a,*, Pavlin B. Entchev a, Peter Popov a, Etienne Patoor b,L. Catherine Brinson c, Xiujie Gao c
a Department of Aerospace Engineering, Texas A&M University, College Station, TX 77843-3141, USAb Laboratory of Physics and Mechanics of Materials, UMR 7554 CNRS—Metz University, ENSAM 4,
rue Augustin Fresnel, 57045 Metz, Francec Department of Mechanical Engineering, Northwestern University, Evanston, IL 60208, USA
Abstract
The second part of this two-part paper summarizes work on the micromechanical modeling of polycrystalline shapememory alloys (SMAs). Averaging micromechanics methods based on the self-consistent approximation are used forthe modeling of polycrystalline SMA thermomechanical behavior. The predictions of several models are directly comparedand correlated with experimental results. Rate independent phenomenological models are then discussed, which are basedon characterizing the inelastic fields associated with the phase transformation and transformation induced plasticity byusing internal state variables. The resulting evolution equations are integrated using return mapping algorithms. Selectednumerical simulations and comparison of the phenomenological models with the micromechanical ones are also presented.� 2005 Elsevier Ltd. All rights reserved.
1. Introduction
Part I of this review paper focused on the model-ing of single crystal SMAs, presenting the kinemat-ics of the martensitic phase transformation andaddressing different approaches for the developmentof the free energy and dissipation in order to formu-late thermomechanical constitutive equations. Inthis Part II results from modeling of polycrystallineSMAs considering both micromechanical appro-aches and phenomenological ones are presented.This part also includes considerations of the numer-
0167-6636/$ - see front matter � 2005 Elsevier Ltd. All rights reserved
doi:10.1016/j.mechmat.2005.08.003
* Corresponding author. Tel.: +1 979 8451604; fax: +1 9798456051.
E-mail address: [email protected] (D.C. Lagoudas).
ical integration of rate-independent SMA constitu-tive models into finite element codes.
During the last two decades the area of constitu-tive modeling of polycrystalline SMAs has been atopic of many research publications and significantadvancements have been reported. The majority ofthe constitutive models reported in the literaturecan be formally classified to belong to one of thetwo groups: micromechanics-based models and phe-nomenological models. Recently Roubicek (2004)reviewed these two types of models as well as atom-istic-level simulations of shape memory behavior.
The micromechanical models attempt to predictthe SMA response by taking into account the gran-ular microstructure of polycrystalline SMAs. Theo-retically, if the micro-structure is well-known it ispossible to use the well developed knowledge of
.

Nomenclature
T temperatureT0 reference temperatureMs martensitic start temperature (at zero
stress level)Mf martensitic finish temperature (at zero
stress level)As austenitic start temperature (at zero
stress level)Af austenitic finish temperature (at zero
stress level)hri, r macroscopic Cauchy stress tensorhei, e linearized, macroscopic, total strainet macroscopic transformation strainL tangent stiffness for a strain incrementH tangent thermal modulii for a strain
incrementL0 homogeneous tangent stiffnessH0 homogeneous tangent thermal moduliiLeff effective tangent stiffnessHeff effective tangent thermal moduliiA(x) stress concentration (localization) tensora(x) thermal concentration (localization) ten-
sorH maximum uniaxial transformation strainI1 first stress invariantJ2 second deviatoric stress invariantJ3 third deviatoric stress invariantG Gibbs free energyGM Gibbs free energy of the martensitic
phaseGA Gibbs free energy of the austenitic phaseGmix Gibbs free energy of the austenite–mar-
tensite mixturen total volume fraction of martensite (phe-
nomenological)nt volume fraction of twinned martensite
(phenomenological)
nd volume fraction of detwinned martensite(phenomenological)
fd internal variable for transformation in-duced plasticity
p thermodynamic driving force conjugateto n
K transformation direction tensorKp plastic direction tensorSA fourth order elastic compliance tensor of
austenite�aA second order thermal dilatations tensor
of austenitecA specific heat of austenitesA0 specific entropy at the reference state of
austeniteuA0 internal energy at the reference state of
austeniteSM fourth order elastic compliance tensor of
martensite�aM second order thermal dilatations tensor
of martensitecM specific heat of martensitesM0 specific entropy at the reference state of
martensiteuM0 internal energy at the reference state of
martensiteSðnÞ effective fourth order elastic compliance
tensor�aðnÞ effective second order thermal dilatations
tensorc(n) effective specific heats0(n) effective specific entropy at the reference
stateu0(n) effective internal energy at the reference
state
D.C. Lagoudas et al. / Mechanics of Materials 38 (2006) 430–462 431
single crystal SMA behavior and solve boundaryvalue problems in a polycrystalline material. Anandand Gurtin (2003) for example, use a model for sin-gle crystal SMA and perform representative numer-ical calculations for the response of polycrystalswith random orientation of the single crystals. Inpractice, however one neither has exact representa-tion of the micro-structure, nor is it possible to solvenumerically problems involving sufficient number ofgrains, as would happen in realistic, three-dimen-
sional boundary value problems. It is therefore nec-essary to use homogenization techniques in order toobtain representative thermomechanical propertiesof a polycrystalline material.
These type of problems first arose in the contextof homogenizing the macroscopic properties ofheterogeneous composite materials. Many homo-genization methods have been developed over theyears for elastic and elastoplastic materials, amongwhich averaging methods (Hershey, 1954; Kroner,

432 D.C. Lagoudas et al. / Mechanics of Materials 38 (2006) 430–462
1958; Hill, 1965; Mori and Tanaka, 1973; Christen-sen, 1991; Nemat-Nasser and Hori, 1993) whichtypically consider ellipsoid inclusion in a Represen-tative Volume Element (RVE) and asymptoticexpansion methods, initially developed for periodicmicrostructure (Bensoussan et al., 1978; Sanchez-Palencia, 1980; Bakhvalov and Panasenko, 1990;Zhikov et al., 1994; Gaymonat et al., 1993).
Most of themicromechanicalmodels for polycrys-talline SMAs are based on a self-consistent type ofaveraging methods (Patoor et al., 1987; Falk, 1990;Patoor et al., 1996; Lagoudas and Bhattacharya,1997; Lu and Weng, 1998; Gao and Brinson, 2002).Such an approach was developed for the elastoplasticbehavior of heterogeneous materials by Berveilleret al. (1994). In the present work two micromechan-ical models for polycrystalline SMAs—the one deve-loped by Patoor et al. (1996) and Gao and Brinson(2002) are presented and compared.
The other class of models for polycrystallineSMAs are phenomenological ones which rely oncontinuum thermomechanics with internal variablesto account for the changes in the microstructure dueto phase transformation. These type of models usu-ally assume a macroscopic energy function thatdepends on state and internal variables used todescribe the degree of phase transformation. Evolu-tion equations are then postulated for the internalvariables. The macroscopic energy and the evolu-tion equations are assumed to have a certain func-tional form, which must be compatible withthermodynamics. The fundamental structure of allthese models is very similar, and can be classifiedas that of constitutive models with internal statevariables (Hill, 1967; Kestin and Rice, 1970; Rice,1971; Kestin and Bataille, 1977). The resulting phe-nomenological models do not directly depend onmaterial parameters at the microscopic level, buton a set of parameters at the macroscopic levelwhich are determined by experimental observations.Such models can be very simple, for example mod-eling the uniaxial pseudoelastic response of anSMA by a piecewise linear function, or can be verycomplex, as in 3-D models, involving a number ofmaterial parameters which have to be determinedby extensive experimentation and often do not haveobvious physical interpretation. Phenomenologicalmodels are easily implementable in numerical meth-ods for the solution of boundary value problems onthe structural (macroscopic) level, and, dependingon the application, one has the flexibility to makenumerous trade-offs between accuracy and com-
plexity. An alternative to using internal variablesand defining evolution equations, as in classicalplasticity, are the energy minimization methods. Inone of the early examples, Ball and James (1987)modeled the SMA as a nonlinear elastic materialand postulated a two-well free energy function. Bydetermining energy minimizing deformations withtwo coherent and macroscopically unstressed vari-ants of martensite it is possible to find a microstruc-ture which corresponds to the loading conditions.Energy minimization methods will not be discussedin this paper.
Significant effort has been devoted over the pastdecade to establish phenomenological constitutivemodels describing the macroscopic thermomechani-cal response of polycrystalline SMAs (Tanaka,1986; Sato and Tanaka, 1988; Tanaka et al., 1992,1995; Patoor et al., 1987, 1988; Ortin and Planes,1988, 1989; Berveiller et al., 1991; Liang and Rog-ers, 1990, 1992; Sun et al., 1991; Sun and Hwang,1993a,b; Graesser and Cozzarelli, 1991; Brinson,1993; Raniecki and Lexcellent, 1994; Boyd andLagoudas, 1994b, 1996a,b; Lagoudas et al., 1994,1996; Marketz and Fischer, 1995; Marketz et al.,1995; Bekker and Brinson, 1997, 1998; Leclercqand Lexcellent, 1996; Lagoudas and Shu, 1999;Juhasz et al., 2002; Bo and Lagoudas, 1999a,b,c;Lagoudas and Bo, 1999; Lexcellent et al., 2000;Lagoudas and Entchev, 2004). Most of the constitu-tive models adopt a thermodynamic structure andselect the martensitic volume fraction as an internalstate variable to account, on the average, for theinfluence of the microstructure.
The early constitutive models (Tanaka, 1986;Tanaka et al., 1986, 1995; Liang and Rogers,1990, 1992; Brinson, 1993; Boyd and Lagoudas,1994a, 1996a) have been used to derive the pseudo-elastic response of SMAs and their main differenceis the hardening function selected to model thestress–strain response during the stress inducedmartensitic phase transformation. A unified frame-work for these early constitutive models hasbeen presented by Lagoudas et al. (1996). Furtherimprovements in the accuracy of SMAs modelswas achieved by Raniecki and Lexcellent (1998),Qidwai and Lagoudas (2000b) and Lexcellentet al. (2002), who proposed different transformationfunctions in order to capture the asymmetricresponse that SMAs exhibit in tension and compres-sion. Qidwai and Lagoudas (2000b) also studied theconsequences the principle of maximum dissipationduring phase transformation has on the transforma-

D.C. Lagoudas et al. / Mechanics of Materials 38 (2006) 430–462 433
tion surface and flow rules. The one-dimensionalmodel of Brinson (1993) was one of the first toinclude modeling of detwinning of martensite. Thework was based on a phase diagram approach andused two volume fractions of martensite to modelpseudoelasticity and detwinning separately. It wasfurther refined by Bekker and Brinson (1997,1998). A thermodynamics based model of detwin-ning has been proposed by Leclercq and Lexcellent(1996), Lagoudas and Shu (1999) and Juhasz et al.(2002). Reorientation of martensite during non-pro-portional loading has been taken into account byBoyd and Lagoudas (1994a), who used a non-asso-ciative flow rule during the reverse transformation.Juhasz et al. (2002) addressed this issue by usingboth the martensitic volume fraction and the trans-formation strain as separate internal variables. Cyc-lic loading and transformation induced plasticity inSMAs has also been a major research topic in SMAmodeling (Tanaka et al., 1995; Lexcellent and Bour-bon, 1996; Bo and Lagoudas, 1999a,b,c; Lagoudasand Bo, 1999; Lexcellent et al., 2000; Lagoudasand Entchev, 2004). In the works of Tanaka et al.(1995) and Lexcellent and Bourbon (1996) it isassumed that a portion of the martensite does notrecover after each cycle, which leads to observableunrecoverable strain, which eventually saturateswith the number of cycles. In the one-dimensionalmodel of Bo and Lagoudas (1999a,b,c) and Lagou-das and Bo (1999) the stress-induced transformationis modelled by allowing both transformation andplastic strains to develop simultaneously as a resultof the applied load. The work was later extended byLagoudas and Entchev (2004) to three dimensions.
The models reviewed above are rate independentones, having a stress–strain response dependantonly on the loading path. Rate dependent constitu-tive models have also been proposed in the litera-ture. An early example is the model by Achenbach(1989), who uses two-well potentials for the freeenergy and statistical physics to justify transitionprobabilities between two different variants of mar-tensite (one in tension and one in compression)and austenite. The formulation of the model allowsfor a softening stress–strain relationship. In a recentpaper this model is extended my Govindjee and Hall(2000), who used multi-well potentials and an arbi-trary number of martensitic variants. Other authorshave directly coupled a nonlinear thermoelasticpotential and a kinetic relation to solve wave prop-agation problems in one-dimensional SMA rods.Abeyaratne and Knowles (1994a,b, 1997) have
solved the Riemann problem in both isothermaland adiabatic settings for an SMA with softeningbehavior. A kinetic relation defining the speed ofpropagation of the phase front is introduced as aconstitutive relation in order to enforce uniquenessof the Riemann problem.
The numerical implementation of phenomeno-logical models has also been an active area ofresearch (Auricchio et al., 1997; Auricchio, 2001;Qidwai and Lagoudas, 2000a; Govindjee andMiehe, 2001). While the computational methodshave their roots in algorithms used in computa-tional plasticity (cf. Ortiz and Popov (1985); Simoand Hughes (1998)), the complex behavior of SMAsrequires the development of specialized algorithms.
This second part of the paper is organized as fol-lows: in Section 2, the self-consistent approach usedin micromechanical modeling of SMAs is presentedand the models by Patoor et al. (1996) and by Gaoand Brinson (2002) are reviewed and compared. InSection 3 an attempt is made to review and classifysome of the huge number of phenomenological mod-els that have been published in the literature. Thepaper is concluded in Section 4 with a typical numer-ical implementation of a phenomenological model.
2. Micromechanical modeling of polycrystalline
SMA behavior
2.1. Thermomechanical integral equation
In Part I of the current paper constitutive rela-tions were determined for single crystals, wherethe crystallographical orientation is completelydefined and where mechanical loading conditionsare considered to be uniform on the whole volume.Such an accurate analysis is impossible in polycrys-talline materials. Existence of the granular structureleads to strain incompatibilities. This phenomenonproduces an intergranular stress field. A prioriknowledge of the local loading conditions on eachgrain is impossible, so the use micromechanicalaveraging methods must considered.
Three fundamental equations govern the scaletransition problem. The first is the stress equilibriumcondition. Given the inelastic character of thebehavior, this condition is expressed in rate form(cf. e.g. Malvern (1969)):
div _r ¼ 0. ð2:1Þ
The second fundamental equation is the compati-bility condition of the total strain field. Local

434 D.C. Lagoudas et al. / Mechanics of Materials 38 (2006) 430–462
quantities must satisfy the imposed boundary condi-tions. Consider a velocity field v(x) applied on thesurface oV of the RVE:
v ¼ _u ¼ h_eix for x 2 oV ; ð2:2Þwhere h_ei is the average strain increment, definedover the volume V of the RVE. As in the first partthe notation h Æ i is used to denote averaging overthe RVE.
The linearized strain rate tensor is given by
_e ¼ 1
2ðr _uþ ðr _uÞTÞ. ð2:3Þ
This equation ensures strain field compatibility inthe solid. The local constitutive law, is the third rela-tionship, which in incremental forms reads:
_r ¼ L_e�H _T . ð2:4ÞThe linearized strain rate _e is composed of a thermo-elastic part and an inelastic part that is directlylinked to the phase transformation. Introducingthe local behavior (2.4) in the equilibrium condition(2.1) gives
div ðL_e�H _T Þ ¼ 0. ð2:5ÞConsider a homogenized reference medium char-
acterized by two homogeneous tangent modulii L0
and H0. A uniform strain rate e0 is applied to thismedium. The tangent modulii in the constitutivelaw (2.4) are defined by their spatial deviationsdL and dH from these homogeneous quantities:
L ¼ L0 þ dL; ð2:6aÞH ¼ H0 þ dH. ð2:6bÞ
Substituting the last two relations in the equilib-rium equation (2.5) gives:
div ððL0 þ dLÞ_e� ðH0 þ dHÞ _T Þ ¼ 0. ð2:7Þ
For simplicity, it is assumed that the temperaturefield is homogeneous and equal to the imposed testtemperature. This implies that divðH0 _T Þ ¼ 0, so thelast equation becomes:
div ðL0ðr _uÞÞ þ div ðdL_e� dH _T Þ ¼ 0. ð2:8ÞThe second part of this equation can be consid-
ered the time-derivative of a volume force f(x) suchthat, for each point x,
div ðL0ðr _uÞÞ þ _f ¼ 0; ð2:9Þwhere
_f ¼ div ðdL_e� dH _T Þ. ð2:10Þ
The Green’s function G0 of an infinite homo-geneous reference medium is defined by
L0rðrG0ðx� x0ÞÞ þ Idðx� x0Þ ¼ 0; ð2:11Þwhere d(x � x 0) is the Dirac function. Setting
_uðxÞ ¼ZVdðx� x0Þ _uðx0ÞdV 0; ð2:12Þ
the following integral equation is obtained from Eq.(2.11):
_uðxÞ ¼ _u0 þZVGðx� x0Þ_fðx0ÞdV 0; ð2:13Þ
where _u0 is the solution for a homogeneous refer-ence medium, subject to the same boundary condi-tions. Substituting Eq. (2.13) into Eq. (2.3) leadsto the following integral equation in term of strainrate:
_eðxÞ¼ e0þZVC0ðx�x0ÞðdLðx0Þ_eðx0Þ�dHðx0Þ _T ÞdV 0;
ð2:14Þ
where C0 is the symmetrical part of the modifiedGreen’s function.
The solution of this last integral equation theo-retically determines the macroscopic behavior.However, this is not trivial. Considering a particularmicrostructure leads to an approximation of Eq.(2.14). The classical paper by Hill (1965), for exam-ple, considers linear elastic grains in a serialarrangement in the polycrystal. Such microstructureleads to the homogeneity of the stress field. Thesame microstructure has been used later by Zaoui(1985) to homogenize plastic materials. This kindof simplified approach has been applied to describepseudoelasticity in SMAs by Patoor et al. (1992).Using a parallel grain distribution on the other handleads to uniformity of the strain field and defines theTaylor model. These two types of solutions possessan extremal character and constitute upper andlower bounds for the real behavior. However, thestatic model underestimates the influence of theinternal stress field and the Taylor model greatlyoverestimates it. The hypothesis of a fully disor-dered material also simplifies the solution of Eq.(2.14), while preserving a correct estimation of theinternal stress field. This last approach definingthe self-consistent models was developed for theelastoplastic behavior of microheterogeneous mate-rials by Berveiller et al. (1994). In the next section,this kind of approach is extended to the case ofpseudoelastic Cu-based alloys.

D.C. Lagoudas et al. / Mechanics of Materials 38 (2006) 430–462 435
2.2. Self-consistent approximation
The integral equation (2.14) is solved using theself-consistent approximation. In this scheme, par-ticular properties of the modified Green’s functionare used. This tensor can be decomposed into a localpart C0l and a non-local part Cnl (Dederichs andZeller, 1973), which is rapidly decreasing:
C0ðx� x0Þ ¼ C0lðxÞdðx� x0Þ þ Cnlðx� x0Þ: ð2:15ÞThe decomposition (2.15) transforms Eq. (2.14)
into
_eðxÞ ¼ e0 þ C0lðdLðxÞ_eðxÞ � dHðxÞ _T Þ
þZVCnlðx� x0ÞðdLðx0Þ_eðx0Þ � dHðx0Þ _T ÞdV 0:
ð2:16Þ
All the difficulties linked to the solution of thisequation come from the last term. This problemcan be simplified by selecting a homogeneous refer-ence medium, for which the nonlocal term in Eq.(2.16) is neglected. The later is equivalent to thenon-local term L_e� dH _T in Eq. (2.8) having a zeromean in the RVE, that is,ZVðdL_e� dH _T ÞdV ¼ 0. ð2:17Þ
With the help of (2.6a) and (2.6b) this impliesthatZVðL_e�H _T ÞdV �
ZVL0 _edV þH0 _T ¼ 0; ð2:18Þ
which is equivalent to
h _ri ¼ L0h_ei �H0 _T . ð2:19ÞSo, the particular choice (2.17) is equivalent to
choosing as the homogeneous reference mediumbe the effective medium i.e.,
L0 ¼ Leff ; ð2:20aÞH0 ¼ Heff . ð2:20bÞ
This assumption greatly simplifies the solution ofthe integral equation (2.16), which now turns into
_eðxÞ ¼ e0 þ CeffðLðxÞ �LeffÞ_eðxÞ� CeffðHðxÞ �HeffÞ _T : ð2:21Þ
In this way, two localization tensors A(x) anda(x) are defined. They connect the local quantity_eðxÞ to the global quantities e0 and _T in such away that Eq. (2.21) is now expressed as
_eðxÞ ¼ AðxÞh_ei � aðxÞ _T . ð2:22Þ
These localization tensors A(x) and a(x) aredefined by
AðxÞ ¼ ðI4 � CeffðLðxÞ �LeffÞÞ�1; ð2:23aÞ
aðxÞ ¼ AðxÞCeffðHðxÞ �HeffÞ. ð2:23bÞDefining these quantities, the uniform tangent
modulii used in Eq. (2.19) is determined from theconstitutive equation (2.4):
Leff ¼ 1
V
ZVLAdV ; ð2:24aÞ
Heff ¼ 1
V
ZVðLaþHÞdV . ð2:24bÞ
Assuming polycrystals to be sets of homogeneousgrains allows the localization tensors to be taken aspiecewise uniform functions. Denoting the uniformtangent modulii of grain k by Lk and the constantvalue of the localization tensor in this grain by Ak,Eq. (2.24) becomes
Leff ¼XKk¼1
LkAk#k; ð2:25Þ
where #k represents the volume fraction of grain k.In the polycrystal, each grain is characterized by itscrystallographic orientation (determined from X-ray diffraction), its shape (from the C0l tensor) andby #N. The overall behavior is then totally deter-mined using Eq. (2.25) from the knowledge of theinternal structure evolution in the polycrystallinematerial. Intergranular interactions coming fromthe crystallographical misorientation are obtainedby the calculation of the stress in each grain.
2.3. Numerical results
A self-consistent code (Lipinski et al., 1990) devel-oped to describe the plastic behavior in polycrystal-line metallic alloys has been modified to compute thepseudoelastic behavior of shape memory alloys.Since the macroscopic reversible strain is less than10%, this code is used for small deformations, andgrain rotation is ignored. Variants of martensitereplace slip systems, and the volume fractions ofthese variants are now the microstructural param-eters describing the internal state evolution. Physicalconstraints (Eq. (1-5.29)) acting on these variableshave been introduced. Recovery of the inelasticstrain and hysteretic effect on unloading are takeninto account. Numerical results obtained are ana-lyzed and compared to experimental observationsperformed on CuZnAl alloys. Note that somemodels reviewed here can also predict shape memory

Table 1Definition of the normal to the habit plane and the direction oftransformation for each martensitic variant in a CuZnAl SMA(De Vos et al., 1978)
436 D.C. Lagoudas et al. / Mechanics of Materials 38 (2006) 430–462
effect. In addition, many alloy systems with differentcompositions have also been simulated. The reader isreferred to Gao and Brinson (2002), Gao et al.(2000) and Huang et al. (2000) for more details.
a n1 n2 n3 m1 m2 m3
b n1 n3 n2 m1 m3 m2
c �n1 n2 n3 �m1 m2 m3
d �n1 n3 n2 �m1 m3 m2
e �n2 n1 n3 �m2 m1 m3
f �n3 n1 n2 �m3 m1 m2
g �n2 �n1 n3 �m2 �m1 m3
h �n3 �n1 n2 �m3 �m1 m2
i n1 �n2 n3 m1 �m2 m3
j n1 �n3 n2 m1 �m3 m2
k �n1 �n2 n3 �m1 �m2 m3
l �n1 �n3 n2 �m1 �m3 m2
m n3 n1 n2 m3 m1 m2
n n2 n1 n3 m2 m1 m3
o n3 �n1 n2 m3 �m1 m2
p n2 �n1 n3 m2 �m1 m3
q n2 �n3 �n1 m2 �m3 �m1
r n3 �n2 �n1 m3 �m2 �m1
s �n2 n3 �n1 �m2 m3 �m1
t �n3 n2 �n1 �m3 m2 �m1
u �n3 �n2 �n1 �m3 �m2 �m1
v �n2 �n3 �n1 �m2 �m3 �m1
w n3 n2 �n1 m3 m2 �m1
x n2 n3 �n1 m2 m3 �m1
n1 = �0.182, n2 = 0.669, n3 = 0.721, m1 = �0.165, m2 = �0.737,m3 = 0.655.
2.3.1. Crystallographic data
The elastic behavior is assumed to be isotropicand homogeneous in the two phases (l � 40 GPaand m � 0.3). The polycrystalline structure is sche-matized by one hundred spherical grains that arerandomly oriented to produce an isotropic texture.The main crystallographic characteristics of themartensitic transformation for CuZnAl shapememory alloys are the ones reported by De Voset al. (1978). These characteristics are consideredto be invariant during the transformation. Opti-cal microscopy combined with image analysis giveaccess to the shape of the different grains. X-raysmeasurement provides a representation of thecrystallographic texture of the polycrystal. The mea-surement of the lattice parameters in the two phasesand the mutual orientation relationships helps todetermine the habit plane normals n, the transfor-mation directions m and the strain intensity c, usingthe WLR phenomenological theory (Wechsler et al.,1953) for the martensitic transformation (Table 1).Uniaxial tensile tests performed on a single crystalat different temperatures were used to estimate thecoefficient B needed in equation (I-5.67) (B � 0.23MPaK�1 in the alloys used).
Existence of compatibility (or incompatibility)relationships between variants is taken into accountby the interaction matrix Hmn. Micromechani-cal determination using minimization of equation(I-5.82) according to the orientation of the inclusionconsidered (Patoor et al., 1996) established that thismatrix (see Table 2) is composed using two types ofterms: weak interaction terms H1 for self-accommo-dated variants (around l/1000) and strong inter-action terms H2 for incompatible variants (aboutl/150). Such distinction is in agreement with metal-lographical observations (Adachi et al., 1988).
H 1 � l=1000 � 40 MPa
H 2 � l=150 � 270 MPa
)for CuZnAl alloy.
ð2:26Þ
Note that none of the other models discussed inthis paper have considered compatibility or incom-patibility in this way since either only one variantis considered or interaction among variants hasbeen considered through their driving forces.
The hysteresis phenomenon linked to the trans-formation is related to the critical force Fc. Mea-surement of temperatures Ms and Af allows theevaluation of the amplitude of this force using equa-tion (I-5.68):
2F c ¼ BðAf �M sÞ. ð2:27ÞTemperatures Af and Ms depend on the material
composition. The difference between these two tem-peratures is almost constant for a given class ofalloys but is very sensitive to the thermomechanicalloading history. This aspect is not studied here; Fc isconsidered as being constant along the loading path.It is worthwhile to note that the different materialparameters used in this work are measurable quan-tities, except for H1 and H2 used in Patoor et al.(1996), which are determined from micromechanicalconsiderations. There is no use of adjustable param-eters in this approach.
2.3.2. Numerical results
In this section all simulation results are predictedby the model of Patoor et al. (1996) except as men-tioned explicitly. For figures showing only the simu-lations of Patoor et al. (1996), the results by Gao

Table 2Interaction matrix Hmn determined for CuZnAl shape memory alloy: C denotes the compatible interactions (H1) and blank denotes theincompatible ones (H2) (Patoor et al., 1994)
a b c d e f g h i j k l m n o p q r s t u v w x
a C C C C C C C C C Cb C C C C C C C C C Cc C C C C C C C C C Cd C C C C C C C C C Ce C C C C C C C C C Cf C C C C C C C C C Cg C C C C C C C C C Ch C C C C C C C C C Ci C C C C C C C C C Cj C C C C C C C C C Ck C C C C C C C C C Cl C C C C C C C C C Cm C C C C C C C C C Cn C C C C C C C C C Co C C C C C C C C C Cp C C C C C C C C C Cq C C C C C C C C C Cr C C C C C C C C C Cs C C C C C C C C C Ct C C C C C C C C C Cu C C C C C C C C C Cv C C C C C C C C C Cw C C C C C C C C C Cx C C C C C C C C C C
D.C. Lagoudas et al. / Mechanics of Materials 38 (2006) 430–462 437
and Brinson (2002) are quite similar and are omittedfor clarity.
From these data, the polycrystalline behavior isdetermined for a given thermomechanical loadingpath. Fig. 1 illustrates results obtained for a uniaxialtensile test at room temperature (T = 20 �C) usingthe model of Patoor et al. (1996) while Fig. 2 shows
Fig. 1. Numerical simulation obtained using the self-consistentapproach for tensile test on a polycrystalline pseudoelasticCuZnAl alloy. Computation performed at room temperature(T = 20 �C), Af = 15 �C. The simulation is performed using themodel by Patoor et al. (1996).
Fig. 2. Numerical simulation obtained using the self-consistentapproach for an isothermal tensile test on a polycrystallinepseudoelastic CuZnAl alloy. Computation performed at roomtemperature (T = 20 �C), Af = 15 �C. Simulation results using themodel of Gao and Brinson (2002).
the results obtained by Gao and Brinson (2002). Inthis example, the temperatures Ms and Af are equalto 10 �C and 15 �C, respectively. Several characteris-tics obtained are in agreement with experimentalobservations:
• The maximum transformation strain is close to3%, which is realistic for copper-based alloys.

Fig. 3. Kinetics of a stress-induced martensitic transformationnumerically defined using the self-consistent simulation. Thesimulation is performed using the model by Patoor et al. (1996).
Fig. 4. Evolution of the macroscopic mean transformation strainduring a pseudoelastic tensile test (Entemeyer et al., 1995).
438 D.C. Lagoudas et al. / Mechanics of Materials 38 (2006) 430–462
• The hysteresis size determined at the polycrystal-line level (45 MPa) is greater than the one for themonocrystalline case used in the constitutiveequation (10 MPa).
• The critical transformation stress is in agreementwith the well-known Patel and Cohen (1953)relationship.
In these simulations, several stages may be distin-guished in the course of the transformation. At thevery beginning, the macroscopic transformationstrain is very weak. Around 60 MPa, a sharp varia-tion is observed on the stress–strain curve, whichdefines an apparent macroscopic critical transfor-mation stress. The transformation then proceedsin a steady-state regime. In this second regime, thehardening rate of the simulation in Patoor et al.(1996) given by the ratio dhri/dheti is close to3500 MPa. However, apparent hardening in experi-ments is often due to local heating through latentheat generation during phase transformation. Therate of hardening is therefore dependent on thestrain rate and surrounding heat transfer (Brinsonet al., 2002, 2004). Gao and Brinson (2002) can cap-ture hardening due to this mechanism when solvedin conjunction with heat transfer equations to pro-vide the temperature profile. The simulation hereis performed isothermally and therefore lacks thehardening characteristic, but otherwise is quite sim-ilar to the simulation in Patoor et al. (1996).
Evolutions of the internal variables involved inthe macroscopic two-phase approach developed inSection 3 are computed. Numerical determinationof the evolution of the global martensitic volumefraction f according to the loading defines the kineticfor the stress-induced transformation (Fig. 3). Aquasi-linear relationship is observed during thesteady-state regime of Fig. 3. A saturation valuearound 80% of stress-induced martensite is observed.The end of the transformation is associated with avery large stress without physical meaning. In theseconditions, it is no longer possible to assume thatthe transformation mechanism occurs alone; otherphysical phenomena must appear (plasticity, crackinitiation), and the transformation should remainpartial in pseudoelasticity (existence of residual aus-tenite). Similar saturation values are obtained byGao and Brinson (2002) and have been observedexperimentally in NiTi and CuAlMnZn polycrystal-line specimens (Brinson et al., 2002, 2004).
Numerical results confirm that the macroscopicmean transformation strain cannot be considered
a constant parameter (Fig. 4). This overall valuerapidly decreases in the beginning of the loadingand reaches a saturation value that depends on theloading state. The maximum value of �etM obtainedin the very beginning of the transformation is equalto the transformation strain of the first-inducedwell-oriented variant.
Describing the strain mechanism at a micro-scopic length scale allows that the evolution of themicrostructural parameters be obtained. In thisapproach, information such as the progress of thetransformation inside each individual grain andthe evolution of the different variants of martensitewith respect to the loading path are obtained. Thisallows that two stages of the transformation bedistinguished.

Fig. 5. (a) Evolution of the number of active grains during a tensile test; (b) evolution of the number of active variants per grain on loading(Entemeyer et al., 1995).
Fig. 7. Asymmetry observed between tensile and compressiontests as obtained by numerical simulation using the self-consistentapproach (T �Ms = 10 �C) (Gao and Brinson, 2002).
D.C. Lagoudas et al. / Mechanics of Materials 38 (2006) 430–462 439
In the first stage, increase in the global martens-itic volume fraction is mainly due to the increasein the number of grains in which the transformationtakes place (Fig. 5(a)). In stage two, all grains trans-form, but the number of variants per grain increasesto reach an average saturation value close to threevariants per grain as illustrated by Fig. 5(b).
The model also takes into account the asymmetryobserved in the behavior of these alloys for tensileand compression tests. The crystallographical originof this phenomenon has been determined in thework of Patoor et al. (1995). The habit plane normaland the transformation direction serving as inputdata, it is natural that the asymmetry phenomenonis taken into account there. For the computedcurves, the critical stress, the transformation slopeand the hysteresis size are larger in compressionthan in tension (Figs. 6 and 7). This is in agreementwith the experimental trends (Vacher and Lexcel-lent, 1991).
Fig. 6. Asymmetry observed between tensile and compressiontests as obtained by numerical simulation using the self-consistentapproach (T �Ms = 10 �C). Simulation using the model byPatoor et al. (1996).
Considering different loading paths, a transfor-mation surface in stress space can be determined(Fig. 8). Symmetric behavior is obtained for shear
Fig. 8. Asymmetrical 2-D transformation surface for SMAs instress space numerically determined using the self-consistentapproach (Patoor et al., 1995).

Fig. 9. Comparisons of experimental observations (a) performedon a pseudoelastic CuZnAl alloy (Vacher and Lexcellent, 1991)with numerical simulations for three different models: (b) Patooret al. (1996); (c) Gao and Brinson (2002); (d) Gao and Brinson(2002) using the values for the parameters B and Fc (cf. part I)from Patoor et al. (1996).
Fig. 10. Critical stress for onset of stress-induced martensiticphase transformation in a CuZnAl alloy plotted as a function oftemperature (Vacher and Lexcellent, 1991).
440 D.C. Lagoudas et al. / Mechanics of Materials 38 (2006) 430–462
loading which is in agreement with experimentalobservations (Manach, 1992). Analytical descrip-tion of such a surface using the second and thirdinvariants of the deviatoric stress tensor is usefulin structural calculation (Gillet et al., 1995).
2.3.3. Comparison with experimental observations
Numerical determination obtained using the pro-posed scale transition framework is now comparedwith experimental results on pseudoelastic CuZnAlalloys from the literature. The CuAl alloy used byVacher and Lexcellent (1991) was provided by theTrefimetaux company. The average grain size is0.3 mm. The thermal treatment was as follows:solution heated in b-phase (10 min at 850 �C),water-quenched and annealed at 20 �C for 48 h.The characteristic transformation temperatures areMs = �98 �C and Af = �91 �C (determined by aresistivity measurement). A uniaxial tensile test wasperformed on a specimen with a 10 mm · 0.6 mmrectangular cross-section and a length of 45 mm.Deformations were measured using an extensome-ter. The imposed strain rate was 10�4 s�1. Variationsin temperature were obtained using a thermally con-trolled chamber in which liquid nitrogen is vapor-ized. Vacher and Lexcellent (1991) characterizedthe pseudoelastic behavior of this alloy between�80 �C and 100 �C.
Numerical results obtained from the self-consis-tent model are determined using the same materialparameters as those of the preceding section (ni,mi, c, B, l, H
nm). Particularities of the studied alloyare taken into account by the parameters T0 and Fc.These quantities are determined from experimentalmeasurements of the temperatures T, Ms and Af
given by Vacher and Lexcellent (1991). Comparisonwith an experimental tensile stress–strain curve for�80 �C indicates that the transformation slopeand the hysteresis size are correctly evaluated bythe model (Fig. 9). Two predictions by Gao andBrinson (2002) are included, one using identical Band Fc values as in Patoor et al. (1996) (B = 0.23,Fc = 0.805), and another using alternate B and Fc
values (B = 0.17, Fc = 0.644) based on recent exam-ination of single crystal data (Gao et al., 2000). Onealso notes hardening features especially betweenstrain values of 0.003 and 0.006 which are due tothe interaction of grains and their variants.
The computed and measured transformationstresses are in good agreement. In the same way,an increase of the test temperature maintains a goodcorrespondence between computed and measured
transformation stress (Fig. 10) for a large range oftest temperatures.
Since the three-dimensional aspects of the mar-tensitic transformation at the microscopic level aretaken into account by the self-consistent method,the proposed framework can be applied to describemultiaxial loading paths. There are, however, onlyfew experimental studies of the multiaxial behaviorof shape memory alloys. Tensile-torsion tests wereperformed by Rogueda (1993) on a CuZnAl alloyprovided by the Trefimetaux company. This alloywas solution-treated in b-phase (15 min at 850 �C),quenched and annealed at 120 �C for 1 h, and then

Fig. 11. Pseudoelastic tensile-torsion test with rrh/rzz ratio of0.333 for a CuZnAl alloy. Comparison between experimentalmeasurement performed by Rogueda (1993) and simulationobtained using the self-consistent method (Patoor et al., 1996).
Fig. 12. Thermally induced phase transformation in a CuZnAlalloy under constant stress of 65 MPa, Ms = 40 �C andAf = 52 �C; The experimental results (a) by Bourbon et al.(1995) are compared with two numerical simulations: (b) Ente-meyer et al. (1995); (c) Gao and Brinson (2002).
D.C. Lagoudas et al. / Mechanics of Materials 38 (2006) 430–462 441
kept at room temperature for several days. The char-acteristic transformation temperatures, determinedby resistivity measurements, are Ms = 14 �C andAf = 20 �C. Pseudoelastic tensile-torsion tests wereperformed on a tube with a diameter of 20 mm, athickness of 2 mm and a length of 71 mm at a tem-perature of 30 �C. Deformations were measuredusing LVDT and RVDT extensometer.
Different proportional loadings are performed,ranging from uniaxial tensile test to pure torsion,keeping the maximum Von Mises equivalent stressequal to 110 MPa. These experimental conditionswere simulated using the self-consistent model. Avery good agreement was obtained (Fig. 11). Therh and zz components of the stress–strain curveare well-captured by the simulation without any fit-ting parameter. Only the test conditions (appliedstress and test temperature) and the characteristictemperatures (Ms and Af) are changed in the inputdata. Change in the critical transformation stressdue to the asymmetrical aspects in the pseudoelasticbehavior is also well captured (Zirifi, 1994).
Non-isothermal behavior can also be describedwithout adding a new internal parameter. The influ-ence of a continuous change in the imposed temper-ature can be accounted for by deriving a completethermo-mechanical integral equation for the scaletransition problem as shown by Entemeyer et al.(1995). In this case, stress and temperature act likeloading parameters. The anisothermal creep behav-ior of shape memory alloys is very well describedusing this extension of the model (see Fig. 12)though the model of Gao and Brinson (2002) showsa more rapid transformation response.
Experimental results reported by Bourbon et al.(1995) on thermal cycling of a CuZnAl shape mem-ory alloy under a constant applied stress of 65 MPaare well captured by this scale transition approach.Numerical results demonstrate that the decrease ofthe maximal transformation strain with the appliedstress level, which has been experimentally ob-served, is related to the formation of self-accommo-dated structure inside the martensite phase.
3. Phenomenological modeling of SMAs
In the case of the phenomenological models, amacroscopic free energy function that depends oninternal variables and their evolution equationsare usually postulated and used in conjunction withthe second law of thermodynamics to derive con-straints on the constitutive behavior of the SMAmaterial. Thus the resulting models are not directlyderived from specific microstructure. These modelshave the advantage of being easily integrated intoa structural analysis computational framework,e.g., using the finite element method.
Describing the complex characteristics involvedin the phase transitions in polycrystalline SMAshas been a significant challenge to researchers.These include modeling the hardening during phasetransformation; the asymmetric response that SMAsexhibit in tension and compression; the modeling ofdetwinning of martensite and, more generally, com-plicated thermomechanical paths beyond isobaric orisothermal ones; two-way shape memory effect; theeffects of reorientation and the accumulation of

442 D.C. Lagoudas et al. / Mechanics of Materials 38 (2006) 430–462
plastic strains during cyclic loading. Historically,the first subject addressed by researchers was thechoice of transformation hardening functions.These topics have been covered in the review paperby Birman (1997). A detailed account can also befound in Lagoudas et al. (1996). In this paper thetopic is briefly summarized in Section 3.1.1.
The topic of transformation surfaces (Section3.1.2) and tension–compression asymmetry of theSMA response has been investigated by Ranieckiand Lexcellent (1998) who presented a model forpseudoelasticity of SMAs. A distinct feature ofthe model is its capability to take into account thedifference between the tension and compressionloading. This is accomplished by using a J2 � J3transformation surface. The model uses exponentialhardening functions. It was used in a later work byRaniecki et al. (2001) to study bending of SMAbeams undergoing pseudoelastic loading. In thisparticular work the tension–compression differencewas neglected. The authors were able to determinethe distribution of the martensitic volume fractionalong the thickness of the beam during both loadingand unloading. Additional results included plots ofthe beam curvature versus the applied moment.Rejzner et al. (2002) have further extended the workon pseudoelastic beams, by including the effect oftension–compression asymmetry in the analysisand comparing the results with experimental data.It was found, however, that the tension–compres-sion asymmetry does not have a significant influenceon the macroscopic beam response.
The comprehensive study of Qidwai and Lagou-das (2000b) focused on the choice of different trans-formation functions and their effect on the materialresponse. In particular, the asymmetry of the mate-rial behavior under tension and compression, as wellas the volumetric transformation strain, can be mod-eled by choosing an appropriate functional form oftransformation function. Qidwai and Lagoudas(2000b) proposed a transformation function, basedon the J2, J3 and I1 stress invariants which canaccount for the observed asymmetry. The subjectof the form of the transformation function has beenrevisited in a recent paper by Lexcellent et al. (2002).Multiaxial experiments on CuZnAl and CuAlBepolycrystalline SMAs have been performed todetermine the initial transformation surface. Theexperiments have revealed tension–compressionasymmetry, consistent with the results found in theliterature. Motivated by the experimental results,Lexcellent et al. (2002) have proposed an analytical
expression for the transformation function, basedon the J2 and J3, stress invariants.
Another important aspect of the SMA response isthe detwinning of martensite (Section 3.2). A 1-Dmodel that separates the martensitic volume fractioninto two parts: thermally-induced (self-accommo-dated) and stress-induced (detwinned) has been pre-sented by Brinson (1993). Leclercq and Lexcellent(1996) have presented a similar model formulatedin a 3-D framework; however, only 1-D implementa-tion and numerical results have been provided. Com-parisons are made with experimental data for bothpseudoelastic mechanical loading as well for isobaricthermally-induced transformation. It has been foundthat the results are in reasonably good agreement,with the largest discrepancies observed for the caseof isobaric thermally-induced transformation. Inanother study, Lagoudas and Shu (1999) have pro-posed a 3-D model with three internal variables butagain with only 1-D numerical implementation andresults. The main difference with the earlier modelby Leclercq and Lexcellent (1996) is in the type oftransformation hardening function.
One of the important problems recently addressedby the researchers is the behavior of SMAs undercycling loading (Tanaka et al., 1995; Lexcellent andBourbon, 1996; Fischer et al., 1998; Lexcellentet al., 2000; Abeyaratne and Kim, 1997; Bo andLagoudas, 1999a,b,c; Lagoudas and Entchev,2004). During cyclic phase transformation a substan-tial amount of plastic strains is accumulated. In addi-tion, the transformation loop evolves with thenumber of cycles and TWSME is developed. Basedon the experimental observations researchers haveattempted to create models able to capture the effectsof cycling loading. One-dimensional models for thebehavior of SMA wires under cycling loading havebeen presented by Tanaka et al. (1995), Lexcellentand Bourbon (1996), Lexcellent et al. (2000) andAbeyaratne and Kim (1997), among others.
A series of papers by Bo and Lagoudas(1999a,b,c) and Lagoudas and Bo (1999) studiesthe cyclic behavior of SMA wires in one dimension.The work focuses on the modeling of stress-inducedtransformation, where both transformation andplastic strains occur simultaneously as a results ofthe applied stress. The resulting model is able toaccount for simultaneous development of transfor-mation and plastic strains during phase transforma-tion under applied loads. In addition to the plasticstrain, the changes in the material response are alsomodeled by introducing evolution equations for the

D.C. Lagoudas et al. / Mechanics of Materials 38 (2006) 430–462 443
material parameters. Finally, minor hysteresis loopsare also modeled by Bo and Lagoudas (1999c). Thisis accomplished by modifying the transformationcriterion and the hardening parameters during aminor loop. All of the above-mentioned featuresof the model have been demonstrated and theresults have been compared with experimental datafor NiTi SMA wires. The results have been found tobe in very good agreement.
A three-dimensional model for transformationinduced plasticity has been presented by Fischeret al. (1998). In contrast to the work by Bo andLagoudas (1999b), separate phase transformationcondition and plasticity yield condition are used byFischer et al. (1998). The theory is presented in gen-eral terms, but the identification of the materialparameters and the implementation are not discussed.
Many other approaches to modeling SMAs havealso been proposed. The work of Brocca et al. (2002)presents a three-dimensional model for SMAs whichis based on the microplane model by Bazant (1984).The main idea of the model is to deduce the macro-scopic constitutive behavior of an SMA by describ-ing the response of the SMA along planes ofdifferent orientations, called microplanes. TheSMA constitutive behavior on the microplanes isdescribed by a one-dimensional model. First, thenormal and shear components of the stress on eachmicroplane are defined in terms of the unit normaland tangential vectors of the plane and the macro-scopic stress tensor. Next, the normal and shearcomponents of the strain are calculated based onthe constitutive model for the microplane. Finally,the components of the macroscopic strain tensorare calculated from the normal and shear strain com-ponents for a set of microplanes using the principalof virtual work. The particular SMA constitutivemodel on the microplane implemented in the workby Brocca et al. (2002) is the one presented by Bek-ker and Brinson (1998), however, it is noted thatany other model can easily be implemented. Theeffect of the hydrostatic pressure and the tension/compression asymmetry are also taken into accountby modifying the critical stress values for phasetransformation and the transformation tempera-tures. Various results demonstrating the capabilitiesof the microplane model are presented and com-pared with experimental data.
One of the latest one-dimensional models forSMA wires is presented by Shaw (2002). The modelis capable of simulating both the pseudoelasticbehavior and the shape memory effect. The new
development of the model by Shaw (2002) is theaccounting for the instabilities during martensiticphase transformation by including strain gradi-ent effects and by allowing softening stress–strainresponse.
Different implementation issues for SMA consti-tutive models have been presented and discussed ina series of papers by Govindjee and coworkers(Govindjee and Kasper, 1999; Govindjee andMiehe, 2001; Hall and Govindjee, 2002). The modelpresented by Govindjee and Kasper (1999) is basedon stress-temperature phase diagram for SMAs.The approach taken in that work is similar to theone presented by Bekker and Brinson (1997). It isassumed that during the martensitic phase transfor-mation two different martensitic variants may form,depending on the sign of the applied loading. Inaddition, if the material is cooled in stress-free con-dition, both variants form simultaneously, resultingin zero macroscopic transformation strain. Furthermechanical loading will result in growth of one mar-tensitic variant at the expense of the other, thus pro-ducing observable macroscopic transformationstrain in the direction of the loading. In a later workGovindjee and Hall (2000) present a constitutivemodel based on statistical physics. Similar to theirprevious work (Govindjee and Kasper, 1999) theevolution of two martensitic variants is prescribed.The model is numerically implemented and resultsfor different loading conditions, including stress-induced and thermally-induced transformation arepresented. A three-dimensional model for SMAshas been presented by Govindjee and Miehe(2001) and Hall and Govindjee (2002), where thenumber of martensitic variants formed during trans-formation is not restricted to two. The general equa-tions of the model have been presented as well as itsnumerical implementation. The numerical resultshave been compared to experimental data forCuAlNi SMA (Shield, 1995). A summary of the fea-tures of some more commonly used SMA models isgiven in Table 3.
A general outline of how a typical phenomeno-logical model is developed is given in the Section3.1, followed by the most common choices fortransformation hardening function (Section 3.1.1)and transformation surfaces (Section 3.1.2). Theproblems involved in modeling of detwinning andreorientation are discussed in Section 3.2 andone particular modeling approach (Lagoudas andEntchev, 2004) to transformation induced plasticityis given in Section 3.3.

Table 3Summary of phenomenological constitutive models
Model Formulation Internalvariables
Features
One dimensional models
Tanaka (1986) n Uses an exponential hardening rule for the phasetransformation. Material properties remainconstant during phase transformation
Liang and Rogers (1990) Helmholtz free energy n Uses a cosine hardening rule for the phasetransformation. Material properties remainconstant during phase transformation
Brinson (1993) Helmholtz free energy nt, nd Introduces two internal variables allowingmodeling of both stress induced andself-accommodated martensite. Usesa cosine hardening law and nonconstantelastic stiffness during phasetransformation
Bekker and Brinson (1997, 1998) Phase diagram based nt, nd The model is entirely formulated in terms ofpossible thermomechanical paths in stress-temperature space. Cosine hardening rule isused for the phase transformation
Govindjee and Kasper (1999) Phase diagram based nMþ; nM
�A distinction is made for martensitic variants intension M� and compression M+. Constantstiffness and thermal expansion coefficient areassumed. The model also includes linearkinematic hardening plasticity. The plasticstrains influence the total amount ofmartensite that can be producedthrough an exponential relation
Three dimensional models
Liang and Rogers (1992) Helmholtz free energy n Three dimensional extension of Liang and Rogers(1990) based on a J2 transformation surface
Boyd and Lagoudas (1994a) Gibbs free energy,quadratic in n
n Uses the volume fraction of stress inducedmartensiteas internal variable and a flowrule to connect it with the transformationstrain. A J2-type of transformation surfaceis used for the forward phase transformation.The model accounts for non-proportionalloading paths by using a non-associativeflow rule during reverse transformation
Boyd and Lagoudas (1996a) Gibbs free energy,quadratic in n
n Provides a unified framework and generalizes theearlier models of Tanaka (1986), Liang andRogers (1990) and Boyd and Lagoudas (1994a)
Leclercq and Lexcellent (1996) Helmholtz free energy nt, nd Uses two internal variables to allow modeling ofboth stress induced and self-accommodatedmartensite. All transformation surfaces areof J2 type, as a result effects of reorientationduring non-proportional loading cannot becaptured. Exponential hardening is used forboth the stress induced transformation andreorientation of martensite
Raniecki and Lexcellent (1998) Gibbs free energy n Models tension compression asymmetry using aJ2 � J3 type transformation surface. Exponentialtransformation hardening functions are used
Lexcellent et al. (2000) Helmholtz free energy nt, nd An extension of Leclercq and Lexcellent (1996) modelwhich also accounts for the TWSME. This is doneby modifying the free energy by an experimentalexpression depending on the maximum stress rmax
during training. This allows to capture the finalresult of the training but does not model the cyclingloading process itself
444 D.C. Lagoudas et al. / Mechanics of Materials 38 (2006) 430–462

Table 3 (continued)
Model Formulation Internalvariables
Features
Bo and Lagoudas(1999a,b,c) andLagoudas and Bo (1999)
Gibbs free energy n Extends the work of Boyd and Lagoudas (1994a)to include modeling of transformation inducedplasticity. This is done by introducing thefollowing state variables: transformationstrain, plastic strain, drag stress, back stressand connecting their evolution to theevolution of the martensitic volumefraction n. Only one-dimensionalimplementation of the transformationinduced plasticity is given
Lagoudas and Shu (1999) Gibbs free energy nA$M t
,nA$Md
,nM
t!Md
The model extends the earlier work of Boyd andLagoudas (1994a). The polycrystalline SMA isconsidered a mixture of three species—self-accommodated martensite Mt , detwinnedmartensite Md and austenite A. The internalvariables describe the three possible transitionsbetween the different species. Nonproportionalloading for pseudoelasticity is handled in thesame way as in Boyd and Lagoudas (1994a).The model however cannot account for thesimultaneous reverse transformationMt,Md ! A and only a one-dimensionalimplementation is provided
Qidwai and (2000b) Gibbs free energy,quadratic in n
n Comprehensive modeling of tension–compressionasymmetry. An extension of the works by Boydand Lagoudas (1994a, 1996a). Several differenttransformation surfaces based on I1-, J2- andJ3-type invariants are proposed
Brocca et al. (2002) Microplane based N/A The constitutive model on each microplane is themodel by Brinson (1993). Thermal expansion isneglected and the elastic modulii are assumedconstant for the two phases. The model is ableto account for non-proportional loading paths
Govindjee and Miehe(2001) and Hall andGovindjee (2002)
Helmohltz/Gibbs free energycontaining third and fourthorder polynomial terms ofthe internal variables
fnigni¼1, nis thenumberof variants
The paper generalizes earlier phenomenologicalmodels by considering an arbitrary number ofmartensitic variants n. The focus of the paperis the numerical implementation of the modelvia a nonlinear optimization method
Juhasz et al. (2002) Helmholtz, quadratic inthe internal variables
et, nt The paper presents a novel approach at dealingwith non-proportional loading. The effects ofreorientation are taken into account by takingthe entire transformation strain et as an internalvariable instead of the detwinned martensiticvolume only. The thermodynamic forces remainnonzero after the completion of the phasetransformation (n = 1) leading to change inthe components of the transformation strainbut not its magnitude
Lagoudas andEntchev (2004)
Gibbs free energy n The model accounts for the simultaneousdevelopment of transformation and plastic strainsduring stress-induced phase transformation. Thework extends and implements in 3-D the modelpresented in Bo and Lagoudas (1999a,b,c) andLagoudas and Bo (1999)
Unless otherwise specified, n is used to denote the volume fraction of all martensite, nd the volume fraction of detwinned and nt the volumefraction of twinned (self-accommodated) martensite.
D.C. Lagoudas et al. / Mechanics of Materials 38 (2006) 430–462 445

446 D.C. Lagoudas et al. / Mechanics of Materials 38 (2006) 430–462
3.1. General formulation
The general framework presented here followsthe developments of Lagoudas et al. (1996) andQidwai and Lagoudas (2000b). The main idea is toformulate the (Gibbs) free energy of the SMA poly-crystalline material as a weighted sum of the freeenergies of the austenitic and the martensitic phasesplus the free energy of mixing:
Gðr; T ; n; etÞ ¼ GAðr; T Þ þ nðGMðr; T Þ � GAðr; T ÞÞþ Gmixðr; T ; n; etÞ; ð3:1Þ
where r is the Cauchy stress tensor, T is the temper-ature, n is the martensitic volume fraction, et is thetransformation strain tensor, GA and GM are theGibbs free energies of the austenite and the martens-ite, respectively, and Gmix is the free energy of mix-ing. The following form for the Gibbs free energyfor both phases is assumed:
GAðr;T Þ¼� 1
2qr :SA : r� 1
q�aA : rðT �T 0Þ
þcA ðT �T 0Þ�T lnTT 0
� �� �þ sA0T þuA0 ;
ð3:2Þ
GMðr;T Þ¼� 1
2qr :SM : r� 1
q�aM : rðT �T 0Þ
þcM ðT �T 0Þ�T lnTT 0
� �� �þ sM0 T þuM0 ;
ð3:3Þ
where Si, �ai, ci, si0 and ui0 are the compliance tensor,thermal expansion coefficient tensor, specific heat,specific entropy and the specific internal energy atthe reference state of the individual phases withthe superscript i = A for austenitic and i = M formartensite, respectively. Finally, q is the materialdensity which is the same for both phases.
Further, a wide range of models can be presentedwithin this formulation if the following assumptionis made on the mixing term:
Gmix ¼ � 1
qr : et þ f ðnÞ; ð3:4Þ
where f(n) is a generic function and q is the massdensity. The fact that f is function of the martensiticvolume fraction n only results in the hardeningdepending only on the amount of phase transforma-tion. Combining Eqs. (3.1)–(3.4), the free energy re-duces to the following equation:
Gðr;T ;n;etÞ¼� 1
2qr :SðnÞ : r� 1
qr : ½�aðnÞðT �T 0Þþ et�
þ cðnÞ ðT �T 0Þ�T lnTT 0
� �� �� s0ðnÞT þu0ðnÞþ f ðnÞ; ð3:5Þ
where SðnÞ, �aðnÞ, c(n), s0(n), and u0(n) are the effec-tive compliance tensor, thermal expansion coeffi-cient tensor, specific heat, specific entropy and thespecific internal energy at the reference state, respec-tively. The above effective material properties arecalculated in terms of the martensitic volume frac-tion n using the rule of mixtures as
SðnÞ ¼ SA þ nðSM � SAÞ ¼ SA þ nDS; ð3:6aÞ�aðnÞ ¼ �aA þ nð�aM � �aAÞ ¼ �aA þ nD�a; ð3:6bÞcðnÞ ¼ cA þ nðcM � cAÞ ¼ cA þ nDc; ð3:6cÞs0ðnÞ ¼ sA0 þ nðsM0 � sA0 Þ ¼ sA0 þ nDs0; ð3:6dÞu0ðnÞ ¼ uA0 þ nðuM0 � uA0 Þ ¼ uA0 þ nDu0. ð3:6eÞ
Next, standard thermodynamics arguments (cf. e.g.Malvern (1969)) are employed to obtain the consti-tutive equations for the strain eand the specific en-tropy s, as well as the local internal dissipation rate:
e ¼ �qoGor
; ð3:7Þ
s ¼ � oGoT
; ð3:8Þ
r : _et � qoGon
_n P 0. ð3:9Þ
For convenience, the generalized thermodynamicdriving force obtained by taking a derivative ofthe energy G with respect to n is denoted by p(Qidwai and Lagoudas, 2000b):
p ¼ �qoGon
¼ 1
2r : DSrþ r : D�aðT � T 0Þ
� qDc T � T 0 � T lnTT 0
� �� �þ qDs0T � qf 0ðnÞ.
ð3:10Þ
At this stage of the constitutive modeling a trans-formation surface which separates the thermoelasticresponse region from the transformation region isdefined:
U ¼bUðrÞ þ p � Y ; _n > 0;
�bUðrÞ � p � Y ; _n < 0;
(ð3:11Þ
where Y is a material parameter. For a detailed dis-cussion on the existence of a thermoelastic domain,

D.C. Lagoudas et al. / Mechanics of Materials 38 (2006) 430–462 447
the reader is referred to Rajagopal and Srinivasa(1998a). A general flow rule is also assumed to havethe type:
_et ¼ K _n. ð3:12Þ
Here K has the meaning of a transformation direc-tion tensor. Under these two assumptions the trans-formation function and the rate of the martensiticvolume fraction must satisfy the Kuhn–Tucker con-ditions (Qidwai and Lagoudas, 2000b):
_n P 0; U 6 0; U _n ¼ 0;
_n 6 0; U 6 0; U _n ¼ 0.ð3:13Þ
Note that Eq. (3.9) and the flow rule (3.12) imply
r : _et � qoGon
_n ¼ ðr : K� pÞ _n P 0; ð3:14Þ
that is, the thermodynamic force p conjugate to n isgiven by (Lagoudas et al., 1996; Qidwai and Lagou-das, 2000b):
p ¼ r : K� p. ð3:15ÞTo complete the constitutive model, the free
energy of mixing Gmix(r, T, n, et) in Eq. (3.1), thetransformation surfaces by selecting the functionalform for bUðrÞ, and the transformation flow rule Kneed to be defined. The mixing energy influencesthe transformation hardening during pseudoelasticloading and the motivation behind different choicesproposed in the literature are discussed in the nextSection 3.1.1. Different choices for bUðrÞ and K arediscussed in Section 3.1.2.
It is important to point out that a Clausius–Cla-peyron type relation similar to equation (I-2.1) canbe derived by considering the stress-temperaturedependence of the transformation surfaces for agiven volume fraction of martensite. Since in thisformulation, the elastic compliances, thermal modu-lii and specific heat of austenite and martensite areallowed to differ, the resulting temperature depen-dence of the critical stress for initiation of phasetransformation will depart from the linear relation-ship given by (I-2.1) (Bo and Lagoudas, 1999b; Qid-wai and Lagoudas, 2000a).
3.1.1. Transformation hardening functionsIt is a common assumption in the early constitu-
tive models (Tanaka, 1986; Tanaka et al., 1986,1995; Liang and Rogers, 1990, 1992; Brinson,1993; Boyd and Lagoudas, 1994a, 1996a) that thehardening depends only on the amount of phase
transformation, i.e., a specific form for f(n) isselected in Eq. (3.4). The most general assumptionis that it is different for the forward and reversetransformation:
f ðnÞ ¼ f MðnÞ; _n > 0;
f AðnÞ; _n < 0.
(ð3:16Þ
The particular choice of f(n) is governed by experi-mental observations. Depending on the chemicalcomposition, heat treatment, mechanical training,etc, different choices have been made in the litera-ture. For example, the exponential model of Tanaka(1986) chooses the functions f M and f A as follows
f M ¼ qDs0aMe
½ð1� nÞ lnð1� nÞ þ n� þ ðle1 þ le
2Þn;
ð3:17Þ
f A ¼ qDs0aAe
n½lnðnÞ � 1� þ ðle1 � le
2Þn; ð3:18Þ
where aMe , aAe , l
e1 and le
2 are material parameters.Liang and Rogers (1990) on the other hand have
proposed
f M ¼Z n
0
� qDs0aMc
½p� cos�1ð2n� 1Þ�dnþ ðlc1 þ lc
2Þn;
ð3:19Þ
f A ¼Z n
0
� qDs0aAc
½p� cos�1ð2n� 1Þ�dnþ ðlc1 � lc
2Þn;
ð3:20Þ
which, in a uniaxial tension test leads to a simple co-sine hardening law. Here aMc , a
Ac , l
c1 and lc
2 are mate-rial parameters. In the polynomial model of Boydand Lagoudas (1996a) a different form is proposed:
f M ¼ 1
2qbMn2 þ ðlp
1 þ lp2Þn; ð3:21Þ
f A ¼ 1
2qbAn2 þ ðlp
1 � lp2Þn; ð3:22Þ
where bM, bA, lp1 and lp
2 are material constants.
3.1.2. Transformation surfacesThe motivation for selecting different transfor-
mation functions is the observed tension—compres-sion asymmetry of SMA materials as well as thedevelopment of a small volumetric strain duringphase transformations.
Before considering specific choices for the trans-formation function bUðrÞ the implications of theprinciple of maximum transformation dissipation

1 J2 is the second deviatoric stress invariant defined asJ 2 ¼ 1
2 devðrÞ : devðrÞ, J3 is the third deviatoric stress invariantdefined as J3 = det( dev(r)) and I1 is the first stress variant, I1 =tr(r).
448 D.C. Lagoudas et al. / Mechanics of Materials 38 (2006) 430–462
are considered (Rajagopal and Srinivasa, 1998b;Qidwai and Lagoudas, 2000b). It can be shown(Qidwai and Lagoudas, 2000b) that this principleimplies an associative flow rule. That is, the trans-formation direction tensor in Eq. (3.12) is the deriv-ative with respect to stress of the transformationfunction:
K ¼ obUðrÞor
; ð3:23Þ
In such a case, the choice of K cannot be indepen-dent of U(r). Notice the transformation flow rule(3.12) with the special form of K given in Eq.(3.23) is associative in temperature–stress space,but not in stress space only.
In practice, by selecting only a single internal vol-ume fraction the effects of martensitic reorientationcannot be accounted for by an associative flow rulefor both loading and unloading. It can happen thatafter following a non-proportional pseudoelasticloading path, upon unloading there will be residualstrain. To avoid this situation, it is often assumedthat the transformation flow rule during unloadingis not associative (with regard to the transformationsurface, i.e. in stress-temperature space). An exam-ple is the model of Lagoudas et al. (1996), wherethe transformation function is selected as
bUðrÞ ¼ffiffiffi3
2
rHkdevðrÞk. ð3:24Þ
Here, devðrÞ ¼ r� 13trðrÞI is the deviatoric stress
and k Æ k is the tensor scalar product. They furtherassume maximum transformation dissipation dur-ing loading, which implies
K ¼ffiffiffi3
2
rH
devðrÞkdevðrÞk ; for _n > 0; ð3:25Þ
In the above equations, H is the maximum uniaxial
transformation strain. Note also, thatffiffi32
qkdevðrÞk
is the von Mises stress. The transformation direc-tion tensor during unloading however is assumedof the form
K ¼ etrevnrev
; for _n < 0. ð3:26Þ
The quantities etrev and nrev are the transformationstrain and the martensitic volume fraction at thebeginning of the reverse phase transformation. Eq.(3.26) implies that the transformation strain at theend of a pseudoelastic thermomechanical loadingpath is always zero.
For the remainder of this section the particularchoices of forward transformation surface will beconsidered an associative transformation flow rules(3.23) will be assumed. This topic is studied atlength by Qidwai and Lagoudas (2000b). In partic-ular, it is shown, that the asymmetry of the materialbehavior under tension and compression as well asthe volumetric transformation strain can be mod-eled by choosing an appropriate transformationfunction. The authors demonstrate that a varietyof transformation surface with different characteris-tics can be obtained by choosing a particular func-tional form of in Eq. (3.11). If the function bUðrÞis J2-based
1 (von Mises type) such asbUðrÞ ¼ affiffiffiffiffiffiffi3J 2
p; ð3:27Þ
then the transformation function used by Boyd andLagoudas (1996a) is recovered. The transformationdirection tensor K in this case will have the follow-ing form (cf. Eq. (3.25)):
K ¼ 3
2a
devðrÞkdevðrÞk . ð3:28Þ
It can be seen from Eqs. (3.25) and (3.28) that theparameter a is identified with the maximum trans-formation strain H.
Another choice of the function bUðrÞ involvesboth J2 and I1 invariants:bUðrÞ ¼ b
ffiffiffiffiffiffiffi3J 2
pþ cI1. ð3:29Þ
The resulting transformation direction tensor isgiven by
K ¼ 3
2b
devðrÞkdevðrÞk þ c1; ð3:30Þ
where 1 is second order identity tensor. The param-eter b is similar to the parameter a in Eq. (3.27),while the parameter c is used to model either thevolumetric transformation strain or the tension–compression asymmetry. As noted by Qidwai andLagoudas (2000b), if c is used to account for the ten-sion–compression asymmetry, then the predictedvolumetric transformation strain may be erroneous.Therefore, to avoid this problem, a third transfor-mation function, based on the J2, J3 and I1 stressinvariants is proposed. The function bUðrÞ takesthe following form:

Fig. 13. Initial transformation surfaces obtained by Lexcellentet al. (2002) (a) and Qidwai and Lagoudas (2000b) (b).
D.C. Lagoudas et al. / Mechanics of Materials 38 (2006) 430–462 449
bUðrÞ ¼ gffiffiffiffiffiffiffi3J 2
p1þ m
J 3
ð3J 2Þ3=2
" #þ xI1. ð3:31Þ
It is also noted that for certain choice of the para-tmeters the transformation surface may becomenon-convex. The resulting transformation directiontensor has the form
K¼ g
"3devðrÞ2
ffiffiffiffiffiffiffi3J 2
p
þm
ffiffiffiffiffiffiffi3J 2
pðdevðrÞdevðrÞ�2=3J 21Þ�3J 3devðrÞ
ð3J 2Þ2
#þx1;
ð3:32Þwhere 1 is a second-order identity tensor.
The material constant x is equal to one-third ofthe volumetric transformation strain while the con-stants g and m are calibrated using the maximumtransformation strains in tension (Ht) and compres-sion (Hc).
The SMA constitutive model presented by Souzaet al. (1998) can be derived as a special case of themodel by Qidwai and Lagoudas (2000b). Two dif-ferent transformation functions were used by Souzaet al. (1998). The first transformation function isbased on the J2 stress invariant and was used to sim-ulate uniaxial loading. The second transformationfunction was introduced to accommodate torsionalloading and is based on J2 and I1 invariants. How-ever, as shown by Qidwai and Lagoudas (2000b) theuse of the I1 stress invariant may lead to large volu-metric transformation strain, not observed in theexperiments. This issue is not discussed in the workof Souza et al. (1998). The constitutive model bySouza et al. (1998) was numerically implementedusing return mapping algorithms. The numericalresults obtained for non-proportional loading havebeen presented and compared with experimentaldata by Sittner et al. (1995).
The subject of the form of the transformationfunction has been revisited in an recent paper byLexcellent et al. (2002). Multiaxial experiments onCuZnAl and CuAlBe polycrystalline SMAs havebeen performed to determine the initial transforma-tion surface. The experiments have revealed ten-sion–compression asymmetry, consistent with theresults found in the literature. Motivated by theexperimental results, Lexcellent et al. (2002) haveproposed an analytical expression for the transfor-mation function, based on the J2 and J3 stress invar-iants. The function has the form
eU ¼ affiffiffiffiffiffiffi3J 2
pF ðyÞ; ð3:33Þ
where
y ¼ 27
2
J 3
ð3J 2Þ3=2; ð3:34Þ
F ðyÞ ¼ cosarccosð1� að1� yÞÞ
3
� �ð3:35Þ
and a is a parameter. The choice of the function F(y)has been made to avoid non-convexity of the trans-formation surface. However, as seen from Fig. 13the transformation surfaces obtained using Eqs.(3.31) and (3.35) have very similar shape. Fur-thermore, the transformation surfaces shown inFig. 13 closely resemble the transformation surfaceobtained using micromechanical modeling andshown in Fig. 8. Note that the stresses in both Figs.8 and 13 are normalized by the critical uniaxial ten-sile stress rMs, however the two figures are notdrawn to the same scale.
3.2. Detwinning of martensite and effects ofreorientation
Aiming at creating a model which accounts bothfor the stress-induced martensite and detwinning,Leclercq and Lexcellent (1996) have separated themartensitic volume fraction into two part: ther-mally-induced (self-accommodated) and stress-induced (detwinned). It should be mentioned,however, that similar approach has been presentedearlier by Brinson (1993). Next, Leclercq andLexcellent (1996) have introduced transformation

450 D.C. Lagoudas et al. / Mechanics of Materials 38 (2006) 430–462
criteria for both types of martensite, as well as crite-rion for detwinning. The transformation criterionfor the stress-induced transformation is based onthe J2 stress invariant (von Mises type, see Eq.(3.29)).
An exponential transformation hardening func-tion has been used by Leclercq and Lexcellent(1996). One-dimensional numerical results for threedifferent types of alloys have been presented andcompared them with experimental data for bothpseudoelastic mechanical loading as well for iso-baric thermally-induced transformation. It has beenfound that the results are in reasonably good agree-ment, with the largest discrepancies observed for thecase of isobaric thermally-induced transformation.
A different approach to the same problem is pre-sented by Bekker and Brinson (1997) and Bekkerand Brinson (1998). A one-dimensional constitutivemodel for SMA wires/rods is formulated in terms ofa phase diagram description of the possible thermo-mechanical loading paths in stress-temperaturespace. In the first of the two papers, Bekker andBrinson (1997) presented the detailed derivation ofthe model. Each loading path is divided into seg-ments where forward/reverse phase transformationor neutral loading occurs. Thus the transformationonset, finish, and reversal points are defined. Then,for each segment of the loading path a kinetic equa-tion is applied to update the martensitic volumefraction, depending on the direction of the loading.The kinetic equations used by Bekker and Brinson(1997) are similar to the cosine model first proposedby Liang and Rogers (1990), while it is also men-tioned that any other kinetic equations can be used,e.g., an exponential (Tanaka, 1986) or polynomial(Boyd and Lagoudas, 1996a) kinetic law. The sec-ond paper of this series (Bekker and Brinson,1998) adopts the same approach presented in thefirst part, with emphasis given on different imple-mentations for minor hysteresis loops, which occurdue to incomplete forward/reverse transformation.Three different algorithms for handling minor hys-teresis loops are implemented and analyzed. Numer-ical examples for different loading paths have beenpresented and discussed. While attractive for one-dimensional applications, it is difficult to generalizethis approach to three dimensions.
An attempt to create a three dimensional modelthat accounts both for stress induced martensite aswell as for detwinning is performed in Lagoudasand Shu (1999). The polycrystalline SMA is consid-ered a mixture of three species—self-accommodated
martensiteMt, detwinned martensiteMd and austen-ite A. The three possible transitions are associatedwith different flow rules (the self-accommodatedtransition does not produce any transformationstrain) thus it is necessary to keep track of theamount of material that underwent each possibletransition. The internal variables therefore describethe three possible transitions between the differentspecies: nA$M t
; nA$Md
; nMt!Md
. Nonproportionalloading for pseudoelasticity is handled in the sameway as in Boyd and Lagoudas (1994a). The modelhowever cannot account for the simultaneousreverse transformation Mt,Md ! A and only aone-dimensional implementation is provided.
A polycrystalline material which undergoesstress-induced martensitic transformation undermultiaxial loading exhibits reorientation of the mar-tensitic variants. Thus, even in the case when theparent phase has transformed into some of the 24martensitic variants, a change in the load directioncertain unfavorable variants will transform to oth-ers in order to accommodate the loading conditions.This, however, will not produce additional transfor-mation strain or change the overall volume fractionof martensite. Phenomenological models which con-sider single martensitic volume fraction as an inter-nal variable are severely constrained in modelingreorientation of martensite. They must necessarilyuse non-associative transformation flow rules toaccomplish that (cf. e.g., Qidwai and Lagoudas,2000b). An ad-hoc way of taking reorientation intoaccount is to use a non-associative flow rule duringunloading, such as the one given by Eq. (3.26), sothat there is no residual transformation strain atthe end of reverse transformation. An alternativeway of accounting for reorientation is to considerthe volume fraction of all possible martensitic vari-ants, which is not feasible as it must provide a hugenumber of phenomenologically determined flowrules for the possible martensitic transformations.In a recent paper by Juhasz et al. (2002) an alterna-tive approach that accounts for pseudoelasticity,detwinning, and reorientation is presented. Themodel does not couple the evolution of the martens-itic volume fraction and inelastic strains as in Eq.(3.12) but instead uses the transformation strain et
and the volume fraction of self-accommodated mar-tensite nd as independent internal variables. Theevolution equations for the internal variables areselected so that upon unloading the transformationstrain becomes zero. While the model avoids dealingwith an excessive number of internal variables, it is

D.C. Lagoudas et al. / Mechanics of Materials 38 (2006) 430–462 451
still more complex than models based on the volumefractions of twinned and detwinned martensite andits robustness is difficult to asses without numericalimplementation and testing on a variety of thermo-mechanical paths.
3.3. Transformation induced plasticity
Here the approach taken in one of the mostrecent works on the cyclic behavior of SMAs(Lagoudas and Entchev, 2004) is briefly outlined.The work is an extension to the work of Bo andLagoudas (1999a,b,c) and Lagoudas and Bo(1999) to 3-D. The formulation of all of these mod-els is based on the framework provided by Lagou-das et al. (1996), by introducing additionalinternal state variables, such as back and drag stressand plastic strain. Following the notation of Section3.1, the Gibbs free energy for the polycrystallineSMA is again given by Eq. (3.1), but the mixingterm is modified to accommodate the plastic strainep, drag stresses g and back stresses a:
Gmix ¼ � 1
qrðet þ epÞ � 1
q
Z n
0
aoep
onþ g
� �dn
þ Gch0 þ Gp. ð3:36Þ
The quantities Gch0 and Gp are the Gibbs chemical
free energy and the interaction energy induced byplastic strains in the austenite, respectively.
In addition to using additional terms in the mix-ing energy, a dependence of the maximum transfor-mation strain on the level of the applied stress is alsointroduced, which leads to the following expressionfor the transformation strain direction coefficient K:
K ¼
ffiffi32
qH cur devðreff Þ
kdevðreff Þk ;_n > 0;
etrevnrev
; _n < 0.
8<: ð3:37Þ
The effective stress reff is defined in terms of theapplied stress r and the back stress a as
reff ¼ rþ a. ð3:38Þ
Hcur is the maximum uniaxial transformation strain,which depends on the value of the effective stressreff. The training of the polycrystalline SMA andthe evolution of the two-way shape memory effectis taken into account by introducing evolution equa-tions for the back stress. The higher values of theback stress results in higher values for the maximumtransformation strain even at low values of the ap-plied stress.
It is noted that the plastic strain in the work ofBo and Lagoudas (1999b) and Lagoudas and Ent-chev (2004) differs from plastic strain in conven-tional metal plasticity as it occurs at stress levelsmuch lower than the plastic yield limit. It is a directresult of the martensitic transformation and themicrostructural changes caused by the transforma-tion cycling. To model it, a new internal variablefd having the meaning of accumulated detwinnedmartensitic volume fraction is introduced. It is con-nected to the evolution of the detwinned martensiticvolume fraction _nd by
fd ¼Z t
0
j _ndðsÞjds. ð3:39Þ
The evolution equation for the plastic strain is as-sumed to be of the form (Lagoudas and Entchev,2004)
_ep ¼ Kp _fd; ð3:40Þwhere Kp is the plastic direction tensor. The follow-ing functional form of Kp, which takes into accountthe saturation of the plastic strain during cyclicloading is used:
Kp ¼
ffiffi32
qCp
1devðreff Þkdevðreff Þk exp � fd
Cp2
� �; _n > 0;ffiffi
32
qCp
1etrevketrevk
exp � fd
Cp2
� �; _n < 0;
8><>: ð3:41Þ
The material parameters Cp1 and Cp
2 govern the sat-uration value as well as the number of cycles neces-sary for the plastic strain to saturate.
To illustrate the capabilities of this model to han-dle cyclic loading, a set of results are presented forboth uniaxial and multiaxial loading cases. As anexample of uniaxial, results for large diameter NiTiwires under cyclic mechanical loading are shown inFigs. 14 and 15. The wires are subjected to 20 load-ing cycles with a constant maximum value of stress.
The capabilities of the model to handle loadingcases beyond uniaxial loading are demonstrated bymodeling the response of an SMA torque tube.The stress–strain response of the tube is shown inFig. 16 where the average shear stress in the finiteelement is plotted versus the average shear strain.The results shown here are in qualitative agreementwith the results reported by Lim and McDowell(1999). Since a full set of material parameters isnot reported in the original work of Lim andMcDowell (1999), the results cannot be comparedquantitatively. It can be seen from the results thatthe hysteresis loop evolves with the number of

Fig. 14. Stress–strain response demonstrating the effects oftransformation induced plasticity. Given are comparison of themodel simulations (Lagoudas and Entchev, 2004) with experi-mental data for the first and 20th cycle.
Fig. 15. Evolution of plastic strain during constant maximumstress cycling (Lagoudas and Entchev, 2004).
Fig. 16. Stress–strain response of NiTi SMA tube subjected tocycling torsional loading: average shear stress over average shearstrain (Lagoudas and Entchev, 2004).
Fig. 17. Plastic strain evolution in NiTi SMA tube during cyclingtorsional loading (Lagoudas and Entchev, 2004).
452 D.C. Lagoudas et al. / Mechanics of Materials 38 (2006) 430–462
loading cycles. One significant difference, observedbetween these results and the uniaxial results shownin Figs. 14 and 15 is the value of the plastic strain atthe end of the cycling test. While the final value ofthe plastic strain in the uniaxial test is equal to thevalue of the accumulated plastic strain, the finalvalue in the case of torsional loading is significantlysmaller. This result can be explain as follows: in thecase of torsional cycling loading the direction of theloading is reversed during each cycle. Therefore,during each half of the loading cycle the directionof the plastic strain accumulation is also reversed.The result of this effect, as shown in Fig. 17 is small
total plastic strain. It should be noted, however, thateven in the presence of small observable plasticstrain the material still changes during the cycling.As seen from Fig. 16 the hysteresis loop evolves dur-ing the cycling loading. Thus, the microstructuralchanges caused by the cyclic loading are taken intoaccount by evolving the material parameters andupdating the internal state variables.
4. Numerical implementation of SMA constitutive
models
In this section the numerical implementationof thermomechanical constitutive equations is pre-

D.C. Lagoudas et al. / Mechanics of Materials 38 (2006) 430–462 453
sented. The structure of the governing equationsof an SMA constitutive model are very similar tothe structure of the equations describing classicalrate-independent plasticity. Therefore it is naturalto utilize return-mapping algorithms developedfor rate-independent plasticity (cf. e.g. Ortiz andPopov, 1985; Ortiz and Simo, 1986; Simo andHughes, 1998) and apply them to SMAs.
Return mapping algorithms have been studiedextensively over the years in the context of elasto-plasticity for the integration of constitutive rela-tions. They are also called elastic predictor-plasticcorrector algorithms where a purely (thermo) elastictrial loading is followed by a plastic corrector phase(return mapping). The corrector part is only appliedif the stress state after the predictor step violates theplastic yield condition (transformation surface forthe case of SMAs). The corrector enforces continu-ity iteratively in a manner consistent with the pre-scribed flow rule. Return mapping algorithms maydiffer on the basis of the kind of discretizationemployed to numerically integrate the evolution dif-ferential equations for the flow rule and the iterativeprocedure adopted to solve the resultant set of non-linear algebraic equations in the corrector part.Some commonly used return mapping algorithmsproposed in the literature are the radial return(backward Euler based) algorithm (Wilkins, 1964)and the mean normal (mid-point rule based) algo-rithm (Rice and Tracey, 1973). A detailed reviewof the historical developments of the return map-ping algorithms can be found in Simo and Hughes(1998).
Ortiz and Popov (1985) have observed that mostof the return mapping algorithms employ integra-tion rules that are particular cases of the trapezoidaland midpoint rules, suitably generalized to facilitatesatisfaction of the plastic consistency condition. Thestability of these integration algorithms for inelas-ticity is studied by Argyris et al. (1979) and Simoand Govindjee (1991). The general conclusion isthat backward integration strategies provide goodstability of the incremental solution. Additionalaccuracy can be obtained by midpoint integrationtechnique or by higher order approximation of theinelastic flow rule, for example by Runge–Kuttamethods.
There are several differences between standardplastic materials and SMAs. SMAs have multipletransformation surfaces, e.g. forward and reversestress-induced phase transformation as well as det-winning, if the model includes it. The surfaces are
defined in both stress and temperature space. Thereverse transformation surface is typically non-con-vex, which presents certain uniqueness issues dis-cussed in Qidwai and Lagoudas (2000b). A typicalflow rule such as the one for the forward transfor-mation in Eq. (3.26) is not associative in stress spacebut becomes associative in stress-temperature space.In addition, the material properties—compliance,thermal expansion coefficient, specific entropy andinternal energy involved in the constitutive relation-ship change during the transformation (cf. equation(3.6)) which results in additional complications inthe numerical implementation. Also, unlike plastic-ity, the phase transformation ends after which theloading proceeds elastically. This imposes an addi-tional constraint of the form n 6 1 which needs tobe addressed as well.
Extensive research on return mapping algorithmsfor SMAs has only recently been performed by Qid-wai and Lagoudas (2000a) who have implementedreturn-mapping algorithms for the family of SMAsmodels (Tanaka, 1986; Tanaka et al., 1986, 1995;Liang and Rogers, 1990, 1992; Brinson, 1993; Boydand Lagoudas, 1994a, 1996a). Two algorithms aredeveloped—the closest point projection algorithmOrtiz and Pinsky (1981) and convex cutting planealgorithm (Simo and Ortiz, 1985; Ortiz and Simo,1986). The difference between the two algorithmsis in the corrector part. The application of the clos-est point projection algorithm results in a set of non-linear algebraic equations solved using Newtonsiteration method. The closest point algorithm isunconditionally stable provided the yield surface isconvex, and it is first-order accurate (Ortiz and Pin-sky, 1981). On the other hand, the convex cuttingplane method uses a Newton method only for thetransformation surface and is based an explicit inte-gration of the transformation flow rule. As a resultit is computationally less demanding, however it isnot unconditionally stable. While the work of Qid-wai and Lagoudas (2000a) is focused on a single vol-ume fraction of martensite, Govindjee and Miehe(2001) have focused on the numerical implementa-tion by return mapping algorithms of models withmultiple martensitic variants and, correspondingly,internal variables. In order to satisfy a polytopeconstraint an active set search strategy is proposedwhich determines the active variants and the corre-sponding thermoelastic prediction. The transforma-tion correction is performed by the backward Eulermethod. The works considered above are all setup within the framework of infinitesimal strains.

2 For a quasi-static problem, this would be the values at the nthloading step, while in a dynamic problem this would be the valuesof the field and internal variables at some discrete instance of timetn.3 Alternatively, the increments Den+1 = en+1 � en and DTn+1 =
Tn+1 � Tn are given, which is equivalent to knowing en+1 andTn+1.
454 D.C. Lagoudas et al. / Mechanics of Materials 38 (2006) 430–462
Auricchio et al. (1997) and Auricchio (2001) havefocused on adapting SMA constitutive models tofinite strains and the have proposed a series ofreturn-mapping algorithms based on the backwardeuler integration scheme for the transformationcorrection.
In this section, the major steps of the numericalimplementation of the more recent model by Lagou-das and Entchev (2004) are briefly outlined. Theimplementation can be viewed as an extension tothe implementation of the earlier class of modelsdescribed in Boyd and Lagoudas (1996a) for whichthe reader is referred to Qidwai and Lagoudas(2000a). The model uses a single volume fractionfor the martensitic phase.
For the sake of improved readability, the modelof Lagoudas and Entchev (2004) is summarizednext. Eq. (3.7) implies that the strain e is given by
e ¼ SðnÞ : rþ �aðnÞðT � T 0Þ þ et þ ep. ð4:1Þ
The evolution equations (3.12) and (3.40) for thetransformation strain et and the plastic strain ep
are given again for convenience
_et ¼ K _n; ð4:2Þ_ep ¼ Kp _fd; ð4:3Þ
where K and Kp are defined by Eqs. (3.37) and (3.41)respectively. The transformation function U is de-fined as
U ¼ p� Y ; _n > 0;
�p� Y ; _n < 0.
(ð4:4Þ
In the above equation p is the thermodynamic forceconjugate to n and is given by
p ¼ 1
2r : DS : rþ r : D�aðT � T 0Þ þ r :
oet
on
þ a :oet
onþ g� qDc T � T 0 � T ln
TT 0
� �� �þ qDs0ðT �M0sÞ: ð4:5Þ
Finally, fd is connected to n by Eq. (3.39) and theevolution of the martensitic volume fraction n isconstrained by the Kuhn–Tucker conditions:
_n P 0; U 6 0; U _n ¼ 0;
_n 6 0; U 6 0; U _n ¼ 0.ð4:6Þ
Thus the final system of nonlinear differential-alge-braic equations consists of Eqs. (4.1)–(4.3) alongwith the constraint (4.6).
4.1. Closest point projection return mapping
algorithm for SMA constitutive model
As mentioned above, the implementation of theSMA model is focused on a single material point.Further, the history of all field and internal variablesat this material point is known. In particular, the val-ues of en; T n; rn; epn ; nn and fdn are known. The sub-script n is used to denote a history/time parameter.2
The new values of en+1 and Tn+1 for the strain andtemperature respectively are also given.3 We mustcompute the values for rnþ1; etnþ1; e
pnþ1; nnþ1 and
fdnþ1 by solving Eqs. (4.1)–(4.3) along with the con-straint (4.6).
To solve this system, the evolution equations(4.2) and (4.3) for the transformation and plasticstrains are discretized as follows:
etnþ1 ¼ etn þ ðnnþ1 � nnÞKnþ1; ð4:7Þepnþ1 ¼ epn þ ðfdnþ1 � fdnÞK
pnþ1. ð4:8Þ
This type of forward Euler discretization is referredto as the closest point projection return mappingalgorithm (Qidwai and Lagoudas, 2000a). Thestress–strain relation (4.1) can also be written as
rnþ1 ¼ Sðnnþ1Þ�1: ðenþ1 � etnþ1 � e
pnþ1 � �aðnnþ1Þ
� ðT nþ1 � T 0ÞÞ. ð4:9Þ
In order to solve the discrete system (4.7)–(4.9) sub-ject to the constraint (4.6) it is convenient to intro-duce the residual functions:
Rtðetnþ1;Knþ1; nnþ1Þ¼ �etnþ1 þ etn þ Knþ1ðnnþ1 � nnÞ; ð4:10Þ
Rpðepnþ1;Kpnþ1; f
dnþ1Þ
¼ �epnþ1 þ epn þ Kp
nþ1ðfdnþ1 � fdnÞ. ð4:11Þ
Observe, that (4.7) and (4.8) are equivalent to
Rtðetnþ1;Knþ1; nnþ1Þ ¼ 0; Rpðepnþ1;Kpnþ1; f
dnþ1Þ ¼ 0
ð4:12Þrespectively.
The nonlinear algebraic system of Eqs. (4.12)and (4.9) subject to the constraint (4.6) is solvedby constructing a converging iterative sequence

D.C. Lagoudas et al. / Mechanics of Materials 38 (2006) 430–462 455
rðkÞnþ1 !
k!1rnþ1; e
tðkÞnþ1 !
k!1etnþ1;
epðkÞnþ1 !
k!1epnþ1; nðkÞnþ1 !
k!1nnþ1;
fdðkÞnþ1 !k!1
fdnþ1. ð4:13Þ
As the first step, a thermoelastic prediction is per-formed during which, the internal variables do notchange:
etð0Þnþ1 ¼ etn; ð4:14aÞ
epð0Þnþ1 ¼ epn; ð4:14bÞ
nð0Þnþ1 ¼ nn; ð4:14cÞ
fdð0Þnþ1 ¼ fdn ; ð4:14dÞ
rð0Þnþ1 ¼ SðnnÞ � 1 : enþ1 � e
tð0Þnþ1
h� e
pð0Þnþ1 � �aðnnÞðT nþ1 � T 0Þ
i: ð4:14eÞ
It should be noted, that this first step corresponds topurely thermoelastic loading without any trans-formation ð _n ¼ 0Þ, hence its name thermoelasticprediction. The corresponding value of the transfor-mation function U is then evaluated:
Uð0Þnþ1 ¼ Uðrð0Þ
nþ1; T nþ1; nð0Þnþ1Þ. ð4:15Þ
If the value of the transformation function satisfiesthe transformation criterion Uð0Þ
nþ1 6 0 then all equa-tions and constraints are satisfied and the iterationis terminated for k = 0.
However, if the transformation criterion is vio-lated, i.e., Uð0Þ
nþ1 > 0 then a transformation correction
is performed during which the stress and the inter-nal variables are modified in accordance with thetransformation flow rules and transformation con-sistency condition. That is, one has to solve (4.12)along with Eq. (4.9). The constraint (4.6) also needsto be satisfied, which, for _n ¼ nnþ1 � nn 6¼ 0 is equiv-alent to
Uðrnþ1; T nþ1; nnþ1Þ ¼ 0: ð4:16Þ
This is done by Newton’s method: For the given kth
iterate of rðkÞnþ1; e
tðkÞnþ1;K
ðkÞnþ1; n
ðkÞnþ1; e
pðkÞnþ1;K
pðkÞnþ1 and fdðkÞnþ1
find the k + 1 iterates by linearizing Rt around
ðetðkÞnþ1;KðkÞnþ1; n
ðkÞnþ1Þ, Rp around ðepðkÞnþ1;K
pðkÞnþ1; f
dðkÞnþ1Þ, and
U around ðrðkÞnþ1; n
ðkÞnþ1Þ and requiring that
RtðkÞnþ1� e
tðkþ1Þnþ1 � e
tðkÞnþ1
� �þ nðkÞnþ1�nn� �
Kðkþ1Þnþ1 �KðkÞ
nþ1
� �þKðkÞ
nþ1 nðkþ1Þnþ1 �nðkÞnþ1
� �¼ 0; ð4:17Þ
RpðkÞnþ1� e
pðkþ1Þnþ1 � e
pðkÞnþ1
� �þ fdðkÞnþ1 � fdn
� �Kpðkþ1Þ
nþ1 �KpðkÞnþ1
� �þKpðkþ1Þ
nþ1 fdðkþ1Þnþ1 �fdðkÞnþ1
� �¼ 0; ð4:18Þ
UðkÞnþ1þorU
ðkÞnþ1 : r
tðkþ1Þnþ1 �r
tðkÞnþ1
� �þonU
ðkÞnþ1ðn
ðkþ1Þnþ1 �nðkÞnþ1Þ¼ 0;
ð4:19Þ
where RtðkÞnþ1 ¼ Rt e
tðkÞnþ1;K
ðkÞnþ1; n
ðkÞnþ1
� �;R
pðkÞnþ1 ¼ Rp e
pðkÞnþ1;
�KpðkÞ
nþ1; fdðkÞnþ1Þ and UðkÞ
nþ1 ¼ U rðkÞnþ1; T nþ1; n
ðkÞnþ1
� �.
The details of solving the linear system (4.17)–(4.19) are omitted, among which the eliminationof fd in the above equations in favor of n, the eval-uation of the derivatives of the transformationtensors K and Kp or the computation of consistenttangent stiffness and thermal modulii. Instead, asummary of all steps of the numerical algorithm isgiven in Table 4. For details of all the derivations,the reader is referred to Entchev (2002).
4.2. Some applications of SMA constitutive models
using numerical methods
In this section some applications of the numericalimplementation of the SMA constitutive model,outlined in the previous section are given. Manysimulations of SMA structures and devices reportedin the literature (see e.g. Liang and Rogers, 1990;Baz et al., 1990; Lagoudas and Tadjbakhsh, 1993;Birman, 1997; Panahandeh and Kasper, 1997; Gilletet al., 1998) involve strength of materials analysis ofdifferent structural SMA members (e.g. wires, rods,beams, springs), Finite Element Method (FEM)simulations of truss elements, specialized FEMbeam elements, etc. These simulations deserve a sep-arate study and will not be discussed any furtherhere.
The potential of SMAs as load-bearing structuralelements in 3-D settings was studied by Jardine et al.(1996) for torque tube actuators in aircraft wings,Liang et al. (1996) for torsional SMA actuators inhelicopter rotors, Rediniotis et al. (1998) for actua-tion devices in underwater vehicles, Trochu andQian (1997) for SMA spring discs and Epps andChopra (2001) for helicopter rotor blades, amongothers. The need for 3-D analysis of structures withSMA actuators led to the development and integra-tion of numerical implementations of 3-D SMAconstitutive models into FEM codes.
The return mapping algorithm presented in Sec-tion 4.1, was successfully implemented in 3-D byQidwai and Lagoudas (2000a) to solve several

Table 4Summary of the closest point projection numerical algorithm for the SMA constitutive model (Entchev, 2002; Lagoudas and Entchev,2004)
1. Let k ¼ 0; enþ1 ¼ en þ Denþ1; T nþ1 ¼ T n þ DT nþ1; etð0Þnþ1 ¼ etn; e
pð0Þnþ1 ¼ epn ; nð0Þnþ1 ¼ nn; S
ð0Þnþ1 ¼ Sn; �a
ð0Þnþ1 ¼ �an.
2. Calculate rðkÞnþ1; UðkÞ
nþ1; RtðkÞnþ1; R
pðkÞnþ1:
rðkÞnþ1 ¼ S
ðkÞ�1nþ1 : ½enþ1 � e
tðkÞnþ1 � e
pðkÞnþ1 � �a
ðkÞnþ1ðT nþ1 � T 0Þ�
UðkÞnþ1 ¼ UðrðkÞ
nþ1; T nþ1; nðkÞnþ1Þ
RtðkÞnþ1 ¼ �e
tðkÞnþ1 þ etn þ KðkÞ
nþ1ðnðkÞnþ1 � nnÞ
RpðkÞnþ1 ¼ �e
pðkÞnþ1 þ epn þ KpðkÞ
nþ1jndðkÞnþ1 � ndn j
If UðkÞnþ1 < 0 OR jDnðkÞnþ1j < TOL1 then go to 7.
3. Calculate NðkÞnþ1 and v
ðkÞnþ1:
NðkÞnþ1 ¼ ½SðkÞ
nþ1 þ orKðkÞnþ1ðn
ðkÞnþ1 � nnÞ þ orR
pðkÞnþ1�
�1
vðkÞnþ1 ¼ D�aðT nþ1 � T 0Þ þ DS : r
ðkÞnþ1 þ KðkÞ
nþ1 þ onRpðkÞnþ1
4. Calculate the increments of the martensitic volume fraction DnðkÞnþ1, stress DrðkÞnþ1, transformation
strain DetðkÞnþ1 and plastic strain DepðkÞnþ1:
DnðkÞnþ1 ¼orU
ðkÞnþ1 : N
ðkÞnþ1 : ½R
tðkÞnþ1 þ R
pðkÞnþ1� � UðkÞ
nþ1
onUðkÞnþ1 � orU
ðkÞnþ1 : N
ðkÞnþ1 : v
ðkÞnþ1
DrðkÞnþ1 ¼ �NðkÞ
nþ1 : ½RtðkÞnþ1 þ R
pðkÞnþ1 þ v
ðkÞnþ1Dn
ðkÞnþ1�
DepðkÞnþ1 ¼ �RpðkÞnþ1 � orR
pðkÞnþ1 : Dr
ðkÞnþ1 � onR
pðkÞnþ1 : Dn
ðkÞnþ1
DetðkÞnþ1 ¼ �Snþ1 : DrðkÞnþ1 � DepðkÞnþ1 � ½D�aðT nþ1 � T 0Þ þ DS : r
ðkÞnþ1�Dn
ðkÞnþ1
5. Update martensitic volume fraction, transformation and plastic strains, elastic compliance tensorand thermal expansion coefficient tensor:
nðkþ1Þnþ1 ¼ nðkÞnþ1 þ DnðkÞnþ1
etðkþ1Þnþ1 ¼ e
tðkÞnþ1 þ DetðkÞnþ1
epðkþ1Þnþ1 ¼ e
pðkÞnþ1 þ DepðkÞnþ1
Sðkþ1Þnþ1 ¼ SA þ nðkþ1Þ
nþ1 DS
�aðkþ1Þnþ1 ¼ �aA þ nðkþ1Þ
nþ1 D�a
6. Set iteration counter k = k + 1. Go to 2.7. Calculate consistent tangent stiffness tensor Lnþ1 and thermal modulii tensor Hn+1:
Lnþ1 ¼ Nnþ1 �Nnþ1 : vnþ1 � orU : Nnþ1
orU : Nnþ1 : vnþ1 � onU
Hnþ1 ¼ Nnþ1 : vnþ1
orU : Nnþ1 : �anþ1 � oTUnþ1
orU : Nnþ1 : vnþ1 � onU� �anþ1
� �8. Update fdnþ1:
fdnþ1 ¼ fdn þH cur
nþ1
HjDnnþ1j
456 D.C. Lagoudas et al. / Mechanics of Materials 38 (2006) 430–462
boundary value problems using the FEM method.Three uniaxial problems involving stress-inducedpseudoelasticity, thermally induced phase trans-formation at constant stress, and variable stressthermally induced phase transformation were con-sidered. Two additional 3-D problems were solvedincluding pure torsion and combined tension-torsion of an SMA torque tube actuator. The path
dependence of the state variables was investigatedduring the combined loading tests.
Modeling of porous SMAs has also been studiedusing the same numerical techniques. Qidwai et al.(2001) performed numerical simulations on a unitcell of a porous SMA matrix in order to derive over-all effective thermomechanical properties. At thesame time an alternative micromechanical technique

4 that is, the spatial dimensions are discretized by conformingfinite elements and the solution is marched at discrete time stepsthrough time.
D.C. Lagoudas et al. / Mechanics of Materials 38 (2006) 430–462 457
based on the incremental formulation of the Mori-Tanaka method was employed and the two werecompared for various loading conditions. It wasfound that both methods compare well in predictingthe isothermal elastic material properties andpseudoelastic response under axial and out-of-planeshear loading. However, the transformation resultsdiffer under transverse and in-plane shear loading.A different approach to the same problem was takenby Entchev and Lagoudas (2002) who developedand implemented a 3-D model for porous SMAs.The porous model was derived using micromechan-ical averaging techniques and explicit macroscopicequations were given. A two-level numerical schemewas used to accurately predict the stress concentra-tions in the unit cell under different loading condi-tions. The model was then applied to simulateuniaxial as well as torsional and torsion–compres-sional loading of a porous, NiTi SMA bar.
There has also been a significant effort to simu-late and predict the properties of SMA basedcomposite materials. For example, Lagoudas et al.(1994) used an explicit return-mapping algorithmin an FEM simulation to simulate the response ofan SMA fiber in a periodic unit cell. This was doneas part of a larger study involving also micro-mechanical techniques and various fiber arrange-ments. Lagoudas et al. (1997) adopted the modelof Boyd and Lagoudas (1996a) and further mod-elled the thermomechanical response of generalactive laminate composites with SMA strips usingthe layerwise finite element method. In a relatedwork, Marfia et al. (2003) employed a different,one variant, SMA model in a layerwise beam theoryto develop SMA beam finite element models. In theproposed finite element formulation the SMA mate-rial is treated as reinforcement of elastic beams.Sottos et al. (1996) and Jonnalagadda et al. (1997,1999) used FEM analysis to solve the coupledmechanical and heat conduction problem in orderto analyze the transformation of embedded shapememory alloy wires and ribbons. An implicit inte-gration was used to obtain unconditional conver-gence. Reisner et al. (1998) used an explicit returnmapping algorithm to perform FEM simulationsof Cu–Fe alloys containing very small austeniticparticles dispersed in random microstructure.
Applications of SMAs involving wave propaga-tion problems have also been considered by usingthe numerical implementation of the previous section(Jimenez-Victory, 1999; Lagoudas et al., 2003).Prompted by the initial analytical studies of Chen
and Lagoudas (2000) and Bekker et al. (2002) on sim-ple 1-D boundary value problems in SMA rods,Jimenez-Victory (1999) used the return-mappingalgorithms of Qidwai and Lagoudas (2000a) andthe constitutive model of Lagoudas et al. (1996) tosolve impact problems in SMA rods. Various explicitfinite-difference schemes as well as the commerciallyavailable FEM solver (ABAQUS) were used. It wasfound that explicit, conditionally stable, finite-differ-ence schemes were easy to implement and gave goodresults if sufficiently small time-steps were used.However large numerical dissipation was observedwhich degraded the quality of the solution with time.It was also found that standard, commercially avail-able, semi-discrete4 FEM solvers were not well suitedfor these types of highly nonlinear wave propagationproblems. It should be noted that wave propagationproblems involving nonlinear (hysteretic) materialspresent many unresolved theoretical problems (cf.e.g. Renardy and Rogers, 1996; Godlewski and Rav-iart, 1996) such as non-uniqueness of solutions andformation of shocks from arbitrarily smooth initialdata, among others. While it is an open questionwhether traditional space-conforming, semi-discretefinite element methods are suitable for such prob-lems, Lagoudas et al. (2003) used an adaptive finiteelement method along with a combined Picard-New-ton iteration scheme in order to solve the wave prop-agation problem in SMAs. The FEM solution wascompared with experimental results and the twowerefound to be in good agreement.
5. Conclusions
In this paper we reviewed the modeling ofpolycrystalline SMAs by both micromechanicalapproaches and phenomenological ones. A generalframework of miromechanical averaging methodsfor polycrystalline SMAs was presented. A detailedcomparison of two models published in the literaturewas given in order to demonstrate the microme-chanical techniques used in modeling SMAs. Com-parisons of simulated results with experimentalobservations were also summarized and found tobe in good agreement for the major aspects of mar-tensitic phase transformations: pseudoelasticity,influence of the test temperature, hysteresis loop,

458 D.C. Lagoudas et al. / Mechanics of Materials 38 (2006) 430–462
tension–compression asymmetry and multiaxialthermomechanical loading paths.
A broad review of phenomenological constitutivemodels capable of predicting the different hardeningexhibited by different SMA alloys, the observedtension–compression asymmetry, detwinning, reori-entation, two-way shape memory effect and trans-formation induced plasticity were also presented.A general thermodynamic framework was presentedand was used to unify different models using themartensitic volume fraction as an internal variable.A thorough discussion of one particular SMAmodel capable of predicting transformation inducedplasticity was also given.
The numerical integration of rate-independentSMA constitutive models and their incorporationinto finite element codes was also reviewed. A typi-cal return mapping algorithm was presented andapplied to an SMA constitutive model. Finally, abrief overview of some applications of phenomeno-logical SMA constitutive modeling in practical engi-neering applications was given.
Acknowledgments
The authors would like to acknowledge thesupport of the Air Force of Scientific Research(AFOSR), Army Research Office (ARO), theTexas Higher Education Coordinating Board, theNational Air and Space Administration (NASA),and the Centre National de la Recherche Scientifi-que (CNRS). We would also like to express ourgratitude to Bjoern Kiefer, Christophe Niclaeys,Denis Entemeyer, Parikshith Kumar, Yves Gillet,Luciano Machado, Mohammed El Amrani, OlivierBertacchini, and Darren Hartl, who spent a signifi-cant amount of time and effort on the manuscript ofthis paper. E. Patoor would also like to thank Mar-cel Berveiller and Andre Eberhardt for the manyfruitful discussions which led to this paper.
References
Abeyaratne, R., Kim, S.-J., 1997. Cyclic effects in shape-memoryalloys: a one-dimensional continuum model. Int. J. SolidsStruct. 34 (25), 3273–3289.
Abeyaratne, R., Knowles, J.K., 1994a. Dynamics of propagatingphase boundaries: adiabatic theory for thermoelastic solids.Physica D 79, 269–288.
Abeyaratne, R., Knowles, J.K., 1994b. Dynamics of propagatingphase boundaries: Thermoelastic solids with heat conduction.Arch. Ration. Mech. Anal. 126 (3), 203–230.
Abeyaratne, R., Knowles, J.K., 1997. Impact-induced phasetransitions in thermoelastic solids. Phil. Trans. R. Soc. Lond.A 355, 843–867.
Achenbach, M., 1989. Model for an alloy with shape memory.Int. J. Plasticity 5, 371–395.
Adachi, K., Perkins, J., Wayman, C.M., 1988. The crystallogra-phy and boundary structure of interplate-group combinationsof 18R martensite variant in Cu–Zn–Al shape memory alloy.Acta Metall. 36 (5), 1343–1364.
Anand, L., Gurtin, M., 2003. Thermal effects in the superelas-ticity of crystalline shape-memory materials. J. Mech. Phys.Solids 51 (6), 1015–1058.
Argyris, J.H., Doltsinis, J.S., Knudson, W.C., Vaz, L.E.,William, K.J., 1979. Numerical solution of transient nonlinearproblems. Comput. Meth. Appl. Mech. Eng. 17/18, 341–409.
Auricchio, F., 2001. A robust integration-algorithm for a finite-strain shape-memory-alloy superelastic model. Int. J. Plastic-ity 17, 971–990.
Auricchio, F., Taylor, R.L., Lubliner, J., 1997. Shape-memoryalloys: Macromodelling and numerical simulations of thesuperelastic behavior. Comput. Meth. Appl. Mech. Eng. 146,281–312.
Bakhvalov, N., Panasenko, G., 1990. Homogenization: averagingprocesses in periodic media. Kluwer Academic Publishers,Dordrecht.
Ball, J.M., James, R.D., 1987. Fine phase mixture as minimizersof energy. Arch. Ration. Mech. Anal. 100, 13–52.
Bazant, Z.P., 1984. Microplane model for strain controlledinelastic behavior. In: Desai, C.S., Gallagher, R.H. (Eds.),Mechanics of Engineering Materials. Wiley, London, pp. 45–59 (Chapter 3).
Baz, A., Iman, K., McCoy, J., 1990. The dynamics of helicalshape memory actuators. J. Intell. Mater. Systems Struct. 1(1), 105–133.
Bekker, A., Brinson, L.C., 1997. Temperature-induced phasetransformation in a shape memory alloy: Phase diagrambased kinetics approach. J. Mech. Phys. Solids 45 (6), 949–988.
Bekker, A., Brinson, L.C., 1998. Phase diagram based descriptionof the hysteresis behavior of shape memory alloys. ActaMater. 46 (10), 3649–3665.
Bekker, A., Jimenez-Victory, J.C., Popov, P., Lagoudas, D.C.,2002. Impact induced propagation of phase transformation ina shape memory alloy rod. Int. J. Plasticity 18 (11), 1447–1479.
Bensoussan, A., Lions, J., Papanicolaou, G., 1978. AssymptoticAnalysis for Periodic StructuresStudies in Mathematics andits Applications, vol. 5. North-Holland, Amsterdam; NewYork; Oxford.
Berveiller, M., Patoor, E., Buisson, M., 1991. Thermomechanicalconstitutive equations for shape memory alloys. J. Phys. IV 1,C.4,387, European Symposium on Martensitic Transforma-tion and Shape Memory Properties.
Berveiller, M., Morreale, J., Reubrez, E., 1994. Comportementelastoplastique des aciers lors de la mise en forme: Theoriemicromecanique, simulations numeriques et resultats experi-mentaux. Revue Europeennes des elements finis 3 (4), 491–514.
Birman, V., 1997. Review of mechanics of shape memory alloystructures. Appl. Mech. Rev. 50 (11), 629–645.
Bo, Z., Lagoudas, D.C., 1999a. Thermomechanical modeling ofpolycrystalline SMAs under cyclic loading, Part I: Theoreticalderivations. Int. J. Eng. Sci. 37, 1089–1140.

D.C. Lagoudas et al. / Mechanics of Materials 38 (2006) 430–462 459
Bo, Z., Lagoudas, D.C., 1999b. Thermomechanical modeling ofpolycrystalline SMAs under cyclic loading, Part III: Evolu-tion of plastic strains and two-way memory effect. Int. J. Eng.Sci. 37, 1141–1173.
Bo, Z., Lagoudas, D.C., 1999c. Thermomechanical modeling ofpolycrystalline SMAs under cyclic loading, Part IV: Modelingof minor hysteresis loops. Int. J. Eng. Sci. 37, 1174–1204.
Bourbon, G., Lexcellent, C., Leclercq, S., 1995. Modelling of thenon-isothermal cyclic behaviour of a polycrystalline Cu–Zn–Al shape memory alloy. J. Physique IV 5, C8-221-226.
Boyd, J.G., Lagoudas, D.C., 1994a. A constitutive model forsimultaneous transformation and reorientation in shapememory materials. In: Mechanics of Phase Transformationsand Shape Memory Alloys, vol. AMD 189/PVP 292. ASME,pp. 159–172.
Boyd, J.G., Lagoudas, D.C., 1994b. Thermomechanical responseof shape memory composites. J. Intell. Mater. Systems Struct.5, 333–346.
Boyd, J.G., Lagoudas, D.C., 1996a. A thermodynamic constitu-tive model for the shape memory materials. Part I. Themonolithic shape memory alloys. Int. J. Plasticity 12 (6), 805–842.
Boyd, J.G., Lagoudas, D.C., 1996b. A thermodynamical consti-tutive model for shape memory materials. Part II. The SMAcomposite material. Int. J. Plasticity 12 (7), 843–873.
Brinson, L.C., 1993. One-dimensional constitutive behavior ofshape memory alloys: Thermomechanical derivation withnon-constant material functions and redefined martensiteinternal variable. J. Intell. Mater. Syst. Struct. 4, 229–242.
Brinson, L.C., Schmidt, I., Lammering, R., 2002. Micro andmacromechanical investigations of CuAlNi single crystal andCuAlMnZn polycrystalline shape memory alloys. J. Intell.Mater. Syst. Struct. 13 (12), 761–772.
Brinson, L.C., Schmidt, I., Lammering, R., 2004. Stress-inducedtransformation behavior of a polycrystalline NiTi shapememory alloy: micro and macromechanical investigationsvia in situ optical microscopy. J. Mech. Phys. Solids 52 (7),1549–1571.
Brocca, M., Brinson, L.C., Bazant, Z.P., 2002. Three-dimen-sional constitutive model for shape memory alloys based onmicroplane model. J. Mech. Phys. Solids 50, 1051–1077.
Chen, Y.-C., Lagoudas, D.C., 2000. Impact induced phasetransformation in shape memory alloys. J. Mech. Phys. Solids48 (2), 275–300.
Christensen, R.M., 1991. Mechanics of Composite Materials.Krieger Publishing Company, Malabar, FL.
De Vos, J., Aernoudt, E., Delaey, L., 1978. The crystallographyof the martensitic transformation of BCC into 9R: Ageneralized mathematical model. Z. Metallkde 69 (H7),438–444.
Dederichs, P.H., Zeller, R., 1973. Variational treatment of theelastic constants of desordered materials. Z. Phys. 259, 103.
Entchev, P., 2002. Micromechanical modeling of porous shapememory alloys. Ph.D. thesis, Texas A&M University.
Entchev, P.B., Lagoudas, D.C., 2002. Modeling porous shapememory alloys using micromechanical averaging techniques.Mech. Mater. 34 (1), 1–24.
Entemeyer, D., Patoor, E., Eberhardt, A., Berveiller, M., 1995.Micromechanical modelling of the superelastic behavior ofmaterials undergoing thermoelastic phase transition. J. Phy-sique IV 5, C8-233-238.
Epps, J., Chopra, I., 2001. In-flight tracking of helicopter rotorblades using shape memory alloy actuators. Smart Mater.Struct. 10 (1), 104–111.
Falk, F., 1990. Pseudoelastic stress–strain curves of polycrystal-line shape memory alloys calculated from single crystal data.Int. J. Eng. Sci. 27 (3), 277–284.
Fischer, F.D., Oberaigner, E.R., Tanaka, K., Nishimura, F.,1998. Transformation induced plasticity revised, an updatedformulation. Int. J. Solids Struct. 35 (18), 2209–2227.
Gao, X., Brinson, L.C., 2002. A simplified multivariant SMAmodel based on invariant plane nature of martensitic trans-formation. J. Intell. Mater. Syst. Struct. 13 (12), 795–810.
Gao, X., Huang, M., Brinson, L.C., 2000. A multivariantmicromechanical model for SMAs. Part 1. Crystallographicissues for single crystal model. Int. J. Plasticity 16 (10–11),1345–1369.
Gaymonat, G., M’uller, S., Triantafyllidis, N., 1993. Homogeni-zation of nonlinearly elastic materials, macroscopic bifurca-tion and macroscopic loss of rank-one convexity. Arch.Ration. Mech. Anal. 122, 231–290.
Gillet, Y., Patoor, E., Berveiller, M., 1995. Structure calculationapplied to shape memory alloys. J. Physique IV 5, C2-343-348.
Gillet, Y., Patoor, E., Berveiller, M., 1998. Calculation ofpseudoelastic elements using a non symmetrical thermome-chanical transformation criterion and associated rule. J.Intell. Mater. Technol. 9, 366–378.
Godlewski, E., Raviart, P., 1996. Numerical Approximation ofHyperbolic Systems of Conservation Laws. Applied Mathe-matical Sciences, No. 118. Springer-Verlag, New York.
Govindjee, S., Hall, G.J., 2000. A computational model for shapememory alloys. Int. J. Solids Struct. 37, 735–760.
Govindjee, S., Kasper, E.P., 1999. Computational aspects of one-dimensional shape memory alloy modeling with phasediagrams. Comput. Meth. Appl. Mech. Eng. 171, 309–326.
Govindjee, S., Miehe, C., 2001. A multi-variant martensitic phasetransformation model: Formulation and numerical imple-mentation. Comput. Meth. Appl. Mech. Eng. 191, 215–238.
Graesser, E.J., Cozzarelli, F.A., 1991. Shape memory alloys asnew materials for aseismic isolation. J. Eng. Mech. 117 (11),2590–2608.
Hall, G.J., Govindjee, S., 2002. Application of a partially relaxedshape memory free energy function to estimate the phasediagram and predict global microstructure evolution. J.Mech. Phys. Solids 50, 501–530.
Hershey, A.V., 1954. The elasticity of an isotropic aggregate ofanisotropic cubic crystals. J. Appl. Mech. 21, 236–240.
Hill, R., 1965. Continuum micromechanics of elastoplasticpolycrystals. J. Mech. Phys. Solids 13, 89–101.
Hill, R., 1967. The essential structure of constitutive laws formetal composites and polycrystals. J. Mech. Phys. Solids 15,79–95.
Huang, M., Gao, X., Brinson, L.C., 2000. A multivariantmicromechanical model for SMAs. Part 2. Polycrystal model.Int. J. Plasticity 16 (10–11), 1371–1390.
Jardine, A.P., Kudva, J.M., Martin, C., Appa, K., 1996. Shapememory alloy Ti–Ni actuators for twist control of smart wingdesigns. In: SPIE Proceedings of Mathematics and Controlsin Smart Structures, vol. 2717. SPIE, pp. 160–165.
Jimenez-Victory, J.C., 1999. Dynamic analysis of impact inducedphase transformation in shape memory alloys using numericaltechniques. Master’s thesis, Texas A&M University, CollegeStation, TX 77843-3141.

460 D.C. Lagoudas et al. / Mechanics of Materials 38 (2006) 430–462
Jonnalagadda, K.D., Sottos, N.R., Qidwai, M.A., Lagoudas,D.C., 1997. Transformation of embedded shape memory alloyribbons. In: Mathematics and Controls in Smart Structures,vol. 3039. SPIE.
Jonnalagadda, K.D., Sottos, N.R., Qidwai, M.A., Lagoudas,D.C., 1999. Transformation of embedded shape memory alloyribbons. J. Intell. Mater. Syst. Struct. 9, 379–390.
Juhasz, L., Schnack, E., Hesebeck, O., Andra, H., 2002.Macroscopic modeling of shape memory alloys under non-proportional thermo-mechanical loadings. J. Intell. Mater.Syst. Struct. 13, 825–836.
Kestin, J., Bataille, J., 1977. Continuum Models of DiscreteSystemsCh. Irreversible thermodynamics of continua andinternal variables. University of Waterloo Press, pp. 39–67.
Kestin, J., Rice, J., 1970. A critical review of thermodynamicsCh.Paradoxes in the application of thermodynamics to strainedsolids. Mono Book Corp., Baltimore, pp. 275–298.
Kroner, E., 1958. Berechnung der elastischen konstanten desvielkristalls aus den konstanten des einkristalls. Z. Phys. 151,504–518.
Lagoudas, D.C., Bhattacharya, A., 1997. On the correspondencebetween micromechanical models for isothermal pseudoelas-tic responce of shape memory alloys and preisach model forhysteresis. Math. Mech. Solids 2 (4), 405–440.
Lagoudas, D.C., Bo, Z., 1999. Thermomechanical modeling ofpolycrystalline SMAs under cyclic loading, Part II: Materialcharacterization and experimental results for a stable trans-formation cycle. Int. J. Eng. Sci. 37, 1205–1249.
Lagoudas, D.C., Bo, Z., Qidwai, M.A., 1996. A unified thermo-dynamic constitutive model for SMA and finite elementanalysis of active metal matrix composites. Mech. Compos.Mater. Struct. 3, 153–179.
Lagoudas, D.C., Boyd, J.G., Bo, Z., 1994. Micromechanics ofactive composites with SMA fibers. ASME J. Mater. Sci.Technol. 5, 337–347.
Lagoudas, D.C., Entchev, P.B., 2004. Modeling of transforma-tion-induced plasticity and its effect on the behavior of porousshape memory alloys. Part I: Constitutive model for fullydense SMAs. Mech. Mater. 36 (9), 865–892.
Lagoudas, D.C., Moorthy, D., Qidwai, M.A., Reddy, J.N., 1997.Modeling of the thermomechanical response of active lami-nates with SMA strips using the layerwise finite elementmethod. J. Intell. Mater. Syst. Struct. 8 (6), 476–488.
Lagoudas, D.C., Sarh, K., Ravi-Chandar, K., Popov, P., 2003.Dynamic loading of polycrystalline shape memory alloy rods.Mech. Mater. 35 (7), 716.
Lagoudas, D.C., Shu, S., 1999. Residual deformations of activestructures with SMA actuators. Int. J. Mech. Sci. 41, 595–619.
Lagoudas, D.C., Tadjbakhsh, I., 1993. Deformations of activeflexible rods with embedded line actuators. Smart Struct.Mater. 2, 72–81.
Leclercq, S., Lexcellent, C., 1996. A general macroscopicdescription of the thermomechanical behavior of shapememory alloys. J. Mech. Phys. Solids 44 (6), 953–980.
Lexcellent, C., Bourbon, G., 1996. Thermodynamical model forcyclic behaviour of Ti–Ni and Cu–Zn–Al shape memoryalloys under isothermal undulated tensile tests. Mech. Mater.24, 59–73.
Lexcellent, C., Leclerq, S., Gabry, B., Bourbon, G., 2000. Thetwo way shape memory effect of shape memory alloys: anexperimental study and a phenomenological model. Int. J.Plasticity 16, 1155–1168.
Lexcellent, C., Vivet, A., Bouvet, C., Calloch, S., Blanc, P., 2002.Experimental and numerical determinations of the initialsurface of phase transformations under biaxial loading insome polycrystalline shape-memory alloys. J. Mech. Phys.Solids 50 (12), 2717–2735.
Liang, C., Rogers, C.A., 1990. One-dimensional thermomechan-ical constitutive relations for shape memory materials. J.Intell. Mater. Syst. Struct. 1, 207–234.
Liang, C., Rogers, C.A., 1992. A multi-dimensional constitu-tive model for shape memory alloys. J. Eng. Math. 26, 429–443.
Liang, C., Davidson, F., Schetky, L.M., Straub, F.K., 1996.Applications of torsional shape memory alloy actuators foractive rotor blade control—opportunities and limitations. In:SPIE Proceedings of Mathematics and Controls in SmartStructures, vol. 2717. SPIE, pp. 91–100.
Lim, J.T., McDowell, D.L., 1999. Mechanical behavior of a Ni–Tishape memory alloy under axial-torsional proportional andnonproportional loading. J. Eng. Mater. Technol. 121, 9–18.
Lipinski, P., Krier, J., Berveiller, M., 1990. Elastoplasticite desmetaux en grandes deformations: Comportement global etevolution de la structure interne. Rev. Phys. Appl. 25, 361–388.
Lu, Z.K., Weng, G.J., 1998. A self-consistent model for thestress–strain behavior of shape-memory alloy polycrystal.Acta Metall. 46 (15), 5423–5433.
Malvern, L.E., 1969. Introduction to the Mechanics of a Contin-uous Medium. Prentice-Hall, Inc., Englewood Cliffs, NJ.
Manach, P.Y., 1992. Etude du comportement thermomecaniqued’alliages a memoire de forme NiTi. Ph.D. thesis, InstitutNational Polytechnique de Grenoble, France.
Marfia, S., Sacco, E., Reddy, J., 2003. Superelastic and shapememory effects in laminated shape-memory-alloy beams.AIAA J. 41 (1), 100–109.
Marketz, F., Fischer, F., 1995. A mesoscale study on thethermodynamic effect of stress on martensitic transformation.Metall. Mater. Trans. A 26A, 267–278.
Marketz, F., Fischer, F., Tanaka, K., 1995. A computationalmicromechanics study on variant-coalescence in a Cu–Al–Nishape memory alloy. J. Phys. IV, Colloque C2 5, 537–542.
Mori, T., Tanaka, K., 1973. Average stress in matrix and averageenergy of materials with misfitting inclusions. Acta Metall. 21,571–574.
Nemat-Nasser, S., Hori, M., 1993. Micromechanics: OverallProperties of Heterogeneous MaterialsNorth-Holland Seriesin Applied Mathematics and Mechanics, vol 37. North-Holland, Amsterdam.
Ortin, J., Planes, A., 1988. Thermodynamic analysis of thermalmeasurements in thermoelastic martensitic transformations.Acta Metall. 36 (8), 1873–1889.
Ortin, J., Planes, A., 1989. Thermodynamics of thermoelasticmartensitic transformations. Acta Metall. 37 (5), 1433–1441.
Ortiz, M., Pinsky, P.M., 1981. Global analysis methods for thesolution of elastoplastic and viscoplastic dynamic problems.Tech. Rep. UCB/SESM 81/08, Department of Civil Engi-neering, University of California at Berkeley.
Ortiz, M., Popov, E.P., 1985. Accuracy and stability of integra-tion algorithms for elastoplastic constitutive relations. Int. J.Numer. Meth. Eng. 21, 1561–1576.
Ortiz, M., Simo, J.C., 1986. An analysis of a new class ofintegration algorithms for elastoplastic constitutive relations.Int. J. Numer. Meth. Eng. 23, 353–366.

D.C. Lagoudas et al. / Mechanics of Materials 38 (2006) 430–462 461
Panahandeh, M., Kasper, E., 1997. Coupled thermomechani-cal simulation of shape memory alloys. In: Mathematicsand Controls in Smart Structures, vol. 3039. SPIE, pp. 468–480.
Patel, J.R., Cohen, M., 1953. Criterion for the action of appliedstress in the martensitic transformation. Acta Metall. 1, 531–538.
Patoor, E., Bensalah, M.O., Eberhardt, A., Berveiller, M., 1992.Determination du comportement thermomecanique des alli-ages a memoire de forme par minimisation d’un potentielthermodynamique. La Revue de Metallurgie, 1587–1592.
Patoor, E., Eberhard, A., Berveiller, M., 1988. Thermomechan-ical behaviour of shape memory alloys. Arch. Mech. 40 (5–6),775–794.
Patoor, E., Eberhardt, A., Berveiller, M., 1987. Potentielpseudoelastique et plasticite de transformation martensitiquedans les mono et polycristaux metalliques. Acta Metall. 35,2779–2789.
Patoor, E., Eberhardt, A., Berveiller, M., 1994. Micromechanicalmodelling of the shape memory behavior. In: Brinson, L. C.,Moran, B. (Eds.), Proceedings of ASME WAM’94: Mechan-ics of Phase Transformation and Shape Memory Alloys, vol.AMD189/PVD292. ASME, pp. 23–37.
Patoor, E., Eberhardt, A., Berveiller, M., 1996. Micromechanicalmodelling of superelasticity in shape memory alloys. J. Phys.IV 6, C1-277-292.
Patoor, E., El Amrani, M., Eberhardt, A., Berveiller, M., 1995.Determination of the origin for the dissymmetry observedbetween tensile and compression tests on shape memoryalloys. J. Phys. IV 5, C2-495-500.
Qidwai, M.A., Entchev, P.B., Lagoudas, D.C., DeGiorgi, V.G.,2001. Modeling of the thermomechanical behavior of porousshape memory alloys. Int. J. Solids Struct. 38, 8653–8671.
Qidwai, M.A., Lagoudas, D.C., 2000a. Numerical implementa-tion of a shape memory alloy thermomechanical constitutivemodel using return mapping algorithms. Int. J. Numer. Meth.Eng. 47, 1123–1168.
Qidwai, M.A., Lagoudas, D.C., 2000b. On thermomechanics andtransformation surfaces of polycrystalline NiTi shape mem-ory alloy material. Int. J. Plasticity 16, 1309–1343.
Rajagopal, K.R., Srinivasa, A.R., 1998a. Mechanics of theinelastic behavior of materials, part I: theoretical underpin-nigs. Int. J. Plasticity 14 (10–11), 945–967.
Rajagopal, K.R., Srinivasa, A.R., 1998b. Mechanics of theinelastic behavior of materials, part II: inelastic response. Int.J. Plasticity 14 (10–11), 969–995.
Raniecki, B., Lexcellent, C., 1994. RL-models of pseudoelasticityand their specification for some shape memory solids. Eur. J.Mech. A/Solids 13 (1), 21–50.
Raniecki, B., Lexcellent, C., 1998. Thermodynamics of isotropicpseudoelasticity in shape memory alloys. Eur. J. Mech. A/Solids 17 (2), 185–205.
Raniecki, B., Rejzner, J., Lexcellent, C., 2001. Anatomization ofhysteresis loops in pure bending of ideal pseudoelastic smabeams. Int. J. Mech. Sci. 43, 1339–1368.
Rediniotis, O.K., Lagoudas, D.C., Garner, L., Wilson, N., 1998.Experiments and analysis of an active hydrofoil with smaactuators. AIAA Paper No. 98-0102, 36th AIAA AerospaceSciences Meeting, Reno, Nevada.
Reisner, G., Werner, E.A., Fischer, F.D., 1998. Micromechanicalmodeling of martensitic transformation in random micro-structures. Int. J. Solids Struct. 35 (19), 2457–2473.
Rejzner, J., Lexcellent, C., Raniecki, B., 2002. Pseudoelasticbehavious of shape memory alloy beams under pure bend-ing: Experiments and modelling. Int. J. Mech. Sci. 44, 665–686.
Renardy, M., Rogers, R., 1996. An Introduction to PartialDifferential Equations, second ed. Texts in Applied Mathe-matics Springer-Verlag, New York.
Rice, J.R., 1971. Inelastic constitutive relation for solids: Aninternal variable theory and its application to metal plasticity.J. Mech. Phys. Solids 19, 433–455.
Rice, J.R., Tracey, D.M., 1973. Computational fracture mechan-ics. In: Fenres, S.J. (Ed.), Proceedings of the Symposium onNumerical Methods in Structural Mechanics. AcademicPress, New York.
Rogueda, C., 1993. Modelisation thermodynamique du comport-ement pseudoelastique des alliages a memoire de forme. Ph.D.thesis, Universite de Franche-Comte, Besancon.
Roubicek, T., 2004. Models of microstructure evolution in shapememory alloys. In: Ponte Castaneda, P., Telega, J., Gambin,B. (Eds.), Nonlinear Homogenization and its Application,vol. 170 of NATO Science Series II: Mathematics, Physics andChemistry, pp. 269–304.
Sanchez-Palencia, E., 1980. Non-homogeneous media and vibra-tion theoryLecture Notes in Physics, vol. 127. Springer-Verlag, Berlin; New York.
Sato, Y., Tanaka, K., 1988. Estimation of energy dissipation inalloys due to stress-induced martensitic transformation. Res.Mech. 23, 381–392.
Shaw, J.A., 2002. A thermomechanical model for a 1-D shapememory alloy wire with propagating instabilities. Int. J. SolidsStruct. 39, 1275–1305.
Shield, T.W., 1995. Orientation dependence of the pseudoelasticbehavior of single crystals of Cu–Al–Ni in tension. J. Mech.Phys. Solids 43, 869–895.
Simo, J.C., Govindjee, S., 1991. Non-linear b-stability andsymmetry preserving return mapping algorithms for plasticityand viscoplasticity. Int. J. Numer. Meth. Eng., 151–176.
Simo, J.C., Hughes, T.J.R., 1998. Computational Inelasticity.Springer-Verlag, New York Inc.
Simo, J.C., Ortiz, M., 1985. A unified approach to finitedeformation elastoplastic analysis based on the use ofhyperelastic constitutive equations. Comput. Meth. Appl.Mech. Eng. 49, 221–245.
Sittner, P., Hara, Y., Tokuda, M., 1995. Experimental study onthe thermoelastic martensitic transformation in shape mem-ory alloy polycrystal induced by combined external forces.Metall. Mater. Trans. A 26, 2923–2935.
Sottos, N.R., Kline, G.E., Qidwai, M.A., Lagoudas, D.C., 1996.Analysis of phase transformation fronts in embedded shapememory alloy composites. In: Mathematics and Controls inSmart Structures, vol. 2715. SPIE, pp. 25–29.
Souza, A.C., Mamiya, E.N., Zouain, N., 1998. Three-dimen-sional model for solids undergoing stress-induced phasetransformations. Eur. J. Mech. A/Solids 17, 789–806.
Sun, Q.P., Hwang, K.C., 1993a. Micromechanics modeling forthe constitutive behavior of polycrystalline shape memoryalloys—I. Derivation of general relations. J. Mech. Phys.Solids 41 (1), 1–17.
Sun, Q.P., Hwang, K.C., 1993b. Micromechanics modelling forthe constitutive behavior of polycrystalline shape memoryalloys—II. Study of the individual phenomena. J. Mech. Phys.Solids 41 (1), 19–33.

462 D.C. Lagoudas et al. / Mechanics of Materials 38 (2006) 430–462
Sun, Q.P., Hwang, K.C., Yu, S.W., 1991. A micromechanicsconstitutive model of transformation plasticity with shear anddilatation effect. J. Mech. Phys. Solids 9 (4), 507–524.
Tanaka, K., 1986. A thermomechanical sketch of shape memoryeffect: One-dimensional tensile behavior. Res. Mech. 18, 251–263.
Tanaka, K., Kobayashi, S., Sato, Y., 1986. Thermomechanics oftransformation pseudoelasticity and shape memory effect inalloys. Int. J. Plasticity 2, 59–72.
Tanaka, K., Hayashi, T., Itoh, Y., Tobushi, H., 1992. Analysis ofthermomechanical behavior of shape memory alloys. Mech.Mater. 13, 207–215.
Tanaka, K., Nishimura, F., Hayashi, T., Tobushi, H., Lexcellent,C., 1995. Phenomenological analysis on subloops and cyclicbehavior in shape memory alloys under mechanical and/orthermal loads. Mech. Mater. 19, 281–292.
Trochu, F., Qian, Y.Y., 1997. Nonlinear finite element simulationof superelastic shape memory alloy parts. Comput. Struct. 67,799–810.
Vacher, P., Lexcellent, C., 1991. Study of pseudoelastic behaviourof polycrystalline shape memory alloys by resistivity mea-surement and acoustic emission. In: Proceedings of ICM 6.Kyoto, Japan, pp. 231–236.
Wechsler, M.S., Liberman, D.S., Read, T.A., 1953. On the theoryof the formation of martensite. Trans. AIME 197, 1503–1515.
Wilkins, M.L., 1964. Calculation of elastic–plastic flow. In:Alder, B., et al., (Eds.), Methods of Computational Physics 3.Academic Press, New York.
Zaoui, A., 1985. Macroscopic plastic behaviour of microhomog-eneous materials. In: Sawczuk, A., Bianchi, J. (Eds.), Plastic-ity Today. Elsevier, pp. 451–469.
Zhikov, V., Kozlov, S., Oleinik, O., 1994. Homogenization ofDifferential Operators and Integral Functionals. Springer-Verlag, Berlin; Heildelberg; New York.
Zirifi, M.E.A., 1994. Contributions a l’etude micromecanique destransformations martensitiques thermoelastiques. Ph.D. the-sis, Universite de Metz, France.





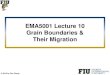




![Image 1, [centered]gk12.egr.uh.edu/.../MugglesPlayWizChess_activity.pdf · 2012. 10. 2. · Procedure Background 1. Shape memory alloys are known by many names: SMA, smart metal,](https://img.pdfslide.us/doc/110x75/5fe3cbe82ca32573b058ad90/image-1-centeredgk12egruhedumugglesplaywizchess-2012-10-2-procedure.jpg)





![Design and Analysis of High-Resolution ... - shape labshape.stanford.edu/research...shape-memory alloys (SMA) [17], [18], hydraulic actuation ... Shape-memory alloy (SMA)-based tactile](https://img.pdfslide.us/doc/110x75/60fa1e22a9f6ed043a4a833e/design-and-analysis-of-high-resolution-shape-shape-memory-alloys-sma.jpg)












