Embed Size (px)
Citation preview

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 1/151
Random Point Processes
Models, Characteristics and Structural Properties
Volker Schmidt
Department of Stochastics
University of Ulm
Sollerhaus–Workshop, March 2006 1

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 2/151
IntroductionAims
1. Explain some basic ideas for stochastic modelling ofspatial point patterns
stationarity (homogeneity) vs. spatial trendsisotropy (rotational invariance)
complete spatial randomness
interaction between points (clustering, repulsion)
Sollerhaus–Workshop, March 2006 2

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 3/151
IntroductionAims
1. Explain some basic ideas for stochastic modelling ofspatial point patterns
stationarity (homogeneity) vs. spatial trendsisotropy (rotational invariance)
complete spatial randomness
interaction between points (clustering, repulsion)2. Describe some basic characteristics of point–process
models
Intensity measure, conditional intensitiesPair correlation function, Ripley’s K-function, etc.
Sollerhaus–Workshop, March 2006 2

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 4/151
IntroductionAims
1. Explain some basic ideas for stochastic modelling ofspatial point patterns
stationarity (homogeneity) vs. spatial trendsisotropy (rotational invariance)
complete spatial randomness
interaction between points (clustering, repulsion)2. Describe some basic characteristics of point–process
models
Intensity measure, conditional intensitiesPair correlation function, Ripley’s K-function, etc.
3. Present techniques for the statistical analysis of spatial
point patterns
Sollerhaus–Workshop, March 2006 2

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 5/151
IntroductionOverview
1. Examples of spatial point patterns
Sollerhaus–Workshop, March 2006 3

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 6/151
IntroductionOverview
1. Examples of spatial point patterns
point patterns in networks
Sollerhaus–Workshop, March 2006 3

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 7/151
IntroductionOverview
1. Examples of spatial point patterns
point patterns in networks
other point patterns
Sollerhaus–Workshop, March 2006 3

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 8/151
IntroductionOverview
1. Examples of spatial point patterns
point patterns in networks
other point patterns
2. Models for spatial point patterns
Sollerhaus–Workshop, March 2006 3

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 9/151
IntroductionOverview
1. Examples of spatial point patterns
point patterns in networks
other point patterns
2. Models for spatial point patterns
Poisson point processes
Sollerhaus–Workshop, March 2006 3

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 10/151
IntroductionOverview
1. Examples of spatial point patterns
point patterns in networks
other point patterns
2. Models for spatial point patterns
Poisson point processes
Cluster and hard–core processes
Sollerhaus–Workshop, March 2006 3

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 11/151
IntroductionOverview
1. Examples of spatial point patterns
point patterns in networks
other point patterns
2. Models for spatial point patterns
Poisson point processes
Cluster and hard–core processes
Gibbs point processes
Sollerhaus–Workshop, March 2006 3

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 12/151
IntroductionOverview
1. Examples of spatial point patterns
point patterns in networks
other point patterns
2. Models for spatial point patterns
Poisson point processes
Cluster and hard–core processes
Gibbs point processes
3. Characteristics of point processes
Sollerhaus–Workshop, March 2006 3

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 13/151
IntroductionOverview
1. Examples of spatial point patterns
point patterns in networks
other point patterns
2. Models for spatial point patterns
Poisson point processes
Cluster and hard–core processes
Gibbs point processes
3. Characteristics of point processes4. Some statistical issues
Sollerhaus–Workshop, March 2006 3

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 14/151
IntroductionOverview
1. Examples of spatial point patterns
point patterns in networks
other point patterns
2. Models for spatial point patterns
Poisson point processes
Cluster and hard–core processes
Gibbs point processes
3. Characteristics of point processes4. Some statistical issues
Nonparametric estimation of model characteristics
Sollerhaus–Workshop, March 2006 3

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 15/151
IntroductionOverview
1. Examples of spatial point patterns
point patterns in networks
other point patterns
2. Models for spatial point patterns
Poisson point processes
Cluster and hard–core processes
Gibbs point processes
3. Characteristics of point processes4. Some statistical issues
Nonparametric estimation of model characteristics
Maximum pseudolikelihood estimation
Sollerhaus–Workshop, March 2006 3

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 16/151
ExamplesPoint patterns in networks
Street system of Paris Cytoskeleton of a leukemia cell
Sollerhaus–Workshop, March 2006 4

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 17/151
ExamplesRandom tessellations
Poisson line (PLT) Poisson-Voronoi (PVT) Poisson-Delaunay (PDT)
Simple and iterated tessellation models
PLT/PLT PLT/PDT PVT/PLT
Sollerhaus–Workshop, March 2006 5

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 18/151
ExamplesModel fitting for network data
Street system of Paris Cutout Tessellation model
(PLT/PLT)
Model fitting for telecommunication networks
Sollerhaus–Workshop, March 2006 6

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 19/151
ExamplesAnalysis of biological networks
a) Actin network at the cell periphery
b) Lamellipodium c) Region behind lamellipodia
Actin filament networks
Sollerhaus–Workshop, March 2006 7

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 20/151
ExamplesAnalysis of biological networks
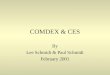
SEM image (keratin) Graph structure Tessellation model
(PVT/PLT)
Model fitting for keratin and actin networks
SEM image (actin) Graph structure Tessellation model (PLT/PDT)
Sollerhaus–Workshop, March 2006 8

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 21/151
Other examplesModelling of tropical storm tracks
Storm tracks of cyclons over Japan
1945-2004
Estimated intensity field for initial points of
storm tracks over Japan
Sollerhaus–Workshop, March 2006 9

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 22/151
Other examplesPoint patterns in biological cell nuclei
Heterochromatin structures in interphase nuclei
3D-reconstruction of NB4 cell nuclei (DNA shown in gray
levels) and centromere distributions (shown in red)
Sollerhaus–Workshop, March 2006 10

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 23/151
Other examplesPoint patterns in biological cell nuclei
Projections of the 3D chromocenter distributions of anundifferentiated (left) NB4 cell and a differentiated (right)
NB4 cell onto the xy-plane
Sollerhaus–Workshop, March 2006 11

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 24/151
Other examplesPoint patterns in biological cell nuclei
Capsides of
cytomegalovirus Extracted point pattern
Model for a point field
(cluster)
Sollerhaus–Workshop, March 2006 12

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 25/151
ModelsBasic ideas
1. Mathematical definition of spatial point processes
Let {X 1, X 2,...} be a sequence of random vectors
with values in
2
andlet X (B) = #{n : X n ∈ B} denote the number of
„points” X n located in a set B ⊂ 2.
Sollerhaus–Workshop, March 2006 13

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 26/151
ModelsBasic ideas
1. Mathematical definition of spatial point processes
Let {X 1, X 2,...} be a sequence of random vectors
with values in
2
andlet X (B) = #{n : X n ∈ B} denote the number of
„points” X n located in a set B ⊂ 2.
If X (B) < ∞ for each bounded set B ⊂
2, then{X 1, X 2,...} is called a random point process.
Sollerhaus–Workshop, March 2006 13

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 27/151
ModelsBasic ideas
1. Mathematical definition of spatial point processes
Let {X 1, X 2,...} be a sequence of random vectors
with values in
2
andlet X (B) = #{n : X n ∈ B} denote the number of
„points” X n located in a set B ⊂ 2.
If X (B) < ∞ for each bounded set B ⊂
2, then{X 1, X 2,...} is called a random point process.
2. A point process {X 1, X 2,...} is called
stationary (homogeneous) if the distribution of{X 1, X 2,...} is invariant w.r.t translations of the origin,
i.e. {X n} d= {X n − u} ∀ u ∈
2
Sollerhaus–Workshop, March 2006 13

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 28/151
ModelsBasic ideas
1. Mathematical definition of spatial point processes
Let {X 1, X 2,...} be a sequence of random vectors
with values in
2
andlet X (B) = #{n : X n ∈ B} denote the number of
„points” X n located in a set B ⊂ 2.
If X (B) < ∞ for each bounded set B ⊂
2, then{X 1, X 2,...} is called a random point process.
2. A point process {X 1, X 2,...} is called
stationary (homogeneous) if the distribution of{X 1, X 2,...} is invariant w.r.t translations of the origin,
i.e. {X n} d= {X n − u} ∀ u ∈
2
isotropic if the distribution of {X n} is invariantw.r.t rotations around the origin
Sollerhaus–Workshop, March 2006 13

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 29/151
ModelsBasic ideas
1. Stochastic model vs. single realization
Sollerhaus–Workshop, March 2006 14

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 30/151
ModelsBasic ideas
1. Stochastic model vs. single realization
Point processes are mathematical models
Sollerhaus–Workshop, March 2006 14

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 31/151
ModelsBasic ideas
1. Stochastic model vs. single realization
Point processes are mathematical models
Observed point patterns are their realizations
Sollerhaus–Workshop, March 2006 14
M d l

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 32/151
ModelsBasic ideas
1. Stochastic model vs. single realization
Point processes are mathematical models
Observed point patterns are their realizations
2. Some further remarks
Equivalent notions:
point field instead of spatial point process
Sollerhaus–Workshop, March 2006 14
M d l

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 33/151
ModelsBasic ideas
1. Stochastic model vs. single realization
Point processes are mathematical models
Observed point patterns are their realizations
2. Some further remarks
Equivalent notions:
point field instead of spatial point process
Point processes are not necessarily dynamic
Sollerhaus–Workshop, March 2006 14
M d l

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 34/151
ModelsBasic ideas
1. Stochastic model vs. single realization
Point processes are mathematical models
Observed point patterns are their realizations
2. Some further remarks
Equivalent notions:
point field instead of spatial point process
Point processes are not necessarily dynamic
Dynamics (w.r.t. time/space) can be added=> spatial birth-and-death processes
Sollerhaus–Workshop, March 2006 14
M d l

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 35/151
ModelsStationary Poisson process
1. Definition of stationary Poisson processes
Poisson distribution of point counts:
X (B) ∼ Poi(λ|B|) for any bounded B ⊂
2
and someλ > 0
Sollerhaus–Workshop, March 2006 15
M d l

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 36/151
ModelsStationary Poisson process
1. Definition of stationary Poisson processes
Poisson distribution of point counts:
X (B) ∼ Poi(λ|B|) for any bounded B ⊂
2
and someλ > 0
Independent scattering of points: the point counts
X (B1), . . . , X (Bn) are independent random variablesfor any pairwise disjoint sets B1, . . . , Bn ⊂ 2
Sollerhaus–Workshop, March 2006 15
M d l

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 37/151
ModelsStationary Poisson process
1. Definition of stationary Poisson processes
Poisson distribution of point counts:
X (B) ∼ Poi(λ|B|) for any bounded B ⊂
2
and someλ > 0
Independent scattering of points: the point counts
X (B1), . . . , X (Bn) are independent random variablesfor any pairwise disjoint sets B1, . . . , Bn ⊂ 2
2. Basic properties
X (B) = λ|B| =⇒ λ = intensity of pointsVoid–probabilities:
(X (B) = 0) = exp(−λ|B|)
Sollerhaus–Workshop, March 2006 15
M d l

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 38/151
ModelsStationary Poisson process
1. Definition of stationary Poisson processes
Poisson distribution of point counts:
X (B) ∼ Poi(λ|B|) for any bounded B ⊂
2
and someλ > 0
Independent scattering of points: the point counts
X (B1), . . . , X (Bn) are independent random variablesfor any pairwise disjoint sets B1, . . . , Bn ⊂ 2
2. Basic properties
X (B) = λ|B| =⇒ λ = intensity of pointsVoid–probabilities:
(X (B) = 0) = exp(−λ|B|)
Conditional uniformity: Given X (B) = n, the locations
of the n points in B are independent and uniformlydistributed random variables
Sollerhaus–Workshop, March 2006 15
Models

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 39/151
ModelsStationary Poisson process
Simulated realization of a stationary Poisson process
Sollerhaus–Workshop, March 2006 16
Models

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 40/151
ModelsStationary Poisson process
Simulated realization of a stationary Poisson process
convincingly shows
Complete spatial randomness
Sollerhaus–Workshop, March 2006 16
Models

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 41/151
ModelsStationary Poisson process
Simulated realization of a stationary Poisson process
convincingly shows
Complete spatial randomness
No spatial trend
Sollerhaus–Workshop, March 2006 16
Models

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 42/151
ModelsStationary Poisson process
Simulated realization of a stationary Poisson process
convincingly shows
Complete spatial randomness
No spatial trend
No interaction between the pointsSollerhaus–Workshop, March 2006 16
Models

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 43/151
ModelsGeneral Poisson process
1. Definition of general (non–homogeneous) Poissonprocesses
Poisson distribution of point counts:X (B) ∼ Poi(Λ(B)) for any bounded B ⊂ 2 and
some measure Λ : B ( 2) → [0, ∞]
Sollerhaus–Workshop, March 2006 17
Models

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 44/151
ModelsGeneral Poisson process
1. Definition of general (non–homogeneous) Poissonprocesses
Poisson distribution of point counts:X (B) ∼ Poi(Λ(B)) for any bounded B ⊂ 2 and
some measure Λ : B ( 2) → [0, ∞]
Independent scattering of points: the point countsX (B1), . . . , X (Bn) are independent random variables
for any pairwise disjoint sets B1, . . . , Bn ⊂ 2
Sollerhaus–Workshop, March 2006 17
Models

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 45/151
ModelsGeneral Poisson process
1. Definition of general (non–homogeneous) Poissonprocesses
Poisson distribution of point counts:X (B) ∼ Poi(Λ(B)) for any bounded B ⊂ 2 and
some measure Λ : B ( 2) → [0, ∞]
Independent scattering of points: the point countsX (B1), . . . , X (Bn) are independent random variables
for any pairwise disjoint sets B1, . . . , Bn ⊂ 2
2. Basic properties
X (B) = Λ(B) =⇒ Λ = intensity measure
Sollerhaus–Workshop, March 2006 17
Models

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 46/151
ModelsGeneral Poisson process
1. Definition of general (non–homogeneous) Poissonprocesses
Poisson distribution of point counts:X (B) ∼ Poi(Λ(B)) for any bounded B ⊂ 2 and
some measure Λ : B ( 2) → [0, ∞]
Independent scattering of points: the point countsX (B1), . . . , X (Bn) are independent random variables
for any pairwise disjoint sets B1, . . . , Bn ⊂ 2
2. Basic properties
X (B) = Λ(B) =⇒ Λ = intensity measure
Void–probabilities:
(X (B) = 0) = exp(−Λ(B))
Sollerhaus–Workshop, March 2006 17
Models

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 47/151
ModelsGeneral Poisson process
1. Definition of general (non–homogeneous) Poissonprocesses
Poisson distribution of point counts:X (B) ∼ Poi(Λ(B)) for any bounded B ⊂ 2 and
some measure Λ : B ( 2) → [0, ∞]
Independent scattering of points: the point countsX (B1), . . . , X (Bn) are independent random variables
for any pairwise disjoint sets B1, . . . , Bn ⊂ 2
2. Basic properties
X (B) = Λ(B) =⇒ Λ = intensity measure
Void–probabilities:
(X (B) = 0) = exp(−Λ(B))
Intensity function λ(x) ≥ 0 if Λ(B) = B λ(x) dx
Sollerhaus–Workshop, March 2006 17
Further basic models

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 48/151
Further basic modelsPoisson hardcore process
Realisation of a Poisson hardcore process
Sollerhaus–Workshop, March 2006 18
Further basic models

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 49/151
Further basic modelsPoisson hardcore process
Realisation of a Poisson hardcore process
Constructed from stationary Poisson processes (byrandom deletion of points)
Sollerhaus–Workshop, March 2006 18
Further basic models

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 50/151
Further basic modelsPoisson hardcore process
Realisation of a Poisson hardcore process
Constructed from stationary Poisson processes (byrandom deletion of points)
Realizations are relatively regular point patterns (withsmaller spatial variability than in the Poisson case)Sollerhaus–Workshop, March 2006 18
Further basic models

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 51/151
Further basic modelsPoisson hardcore process
Description of the model
Start from a stationary Poisson process (with some
intensity λ > 0)
Sollerhaus–Workshop, March 2006 19
Further basic models

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 52/151
Further basic modelsPoisson hardcore process
Description of the model
Start from a stationary Poisson process (with some
intensity λ > 0)
Cancel all those points whose distance to their nearestneighbor is smaller than some R > 0
Sollerhaus–Workshop, March 2006 19
Further basic models

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 53/151
Further basic modelsPoisson hardcore process
Description of the model
Start from a stationary Poisson process (with some
intensity λ > 0)
Cancel all those points whose distance to their nearestneighbor is smaller than some R > 0
Minimal (hardcore) distance between point–pairs=> R/2 = hardcore radius
Sollerhaus–Workshop, March 2006 19
Further basic models

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 54/151
Further basic modelsPoisson hardcore process
Description of the model
Start from a stationary Poisson process (with some
intensity λ > 0)
Cancel all those points whose distance to their nearestneighbor is smaller than some R > 0
Minimal (hardcore) distance between point–pairs=> R/2 = hardcore radius
Spatial interaction between points (mutual repulsion)
Sollerhaus–Workshop, March 2006 19
Further basic models

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 55/151
Further basic modelsPoisson hardcore process
Description of the model
Start from a stationary Poisson process (with some
intensity λ > 0)
Cancel all those points whose distance to their nearestneighbor is smaller than some R > 0
Minimal (hardcore) distance between point–pairs=> R/2 = hardcore radius
Spatial interaction between points (mutual repulsion)
Two–parametric model (with parameters λ and R)
Sollerhaus–Workshop, March 2006 19
Further basic models

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 56/151
Further basic modelsMatern–cluster process
Realization of a Matern-cluster process
Sollerhaus–Workshop, March 2006 20
Further basic models

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 57/151
Further basic modelsMatern–cluster process
Realization of a Matern-cluster process
Constructed from stationary Poisson processes (ofso–called cluster centers)
Sollerhaus–Workshop, March 2006 20
Further basic models

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 58/151
Further basic modelsMatern–cluster process
Realization of a Matern-cluster process
Constructed from stationary Poisson processes (ofso–called cluster centers)
Realizations are clustered point patterns (with higherspatial variability than in the Poisson case)Sollerhaus–Workshop, March 2006 20
Further basic models

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 59/151
Further basic modelsMatern–cluster process
Description of the model
Centers of clusters form a stationary Poisson process
(with intensity λ0 > 0)
Sollerhaus–Workshop, March 2006 21
Further basic models

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 60/151
Further basic modelsMatern–cluster process
Description of the model
Centers of clusters form a stationary Poisson process
(with intensity λ0 > 0)
Cluster points are within a disc of radius R > 0 (aroundthe cluster center)
Sollerhaus–Workshop, March 2006 21
Further basic models

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 61/151
u t e bas c ode sMatern–cluster process
Description of the model
Centers of clusters form a stationary Poisson process
(with intensity λ0 > 0)
Cluster points are within a disc of radius R > 0 (aroundthe cluster center)
Inside these discs stationary Poisson processes arerealized (with intensity λ1 > 0)
Sollerhaus–Workshop, March 2006 21
Further basic models

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 62/151
Matern–cluster process
Description of the model
Centers of clusters form a stationary Poisson process
(with intensity λ0 > 0)
Cluster points are within a disc of radius R > 0 (aroundthe cluster center)
Inside these discs stationary Poisson processes arerealized (with intensity λ1 > 0)
Spatial interaction between points (mutual attraction,clustering of points)
Sollerhaus–Workshop, March 2006 21
Further basic models

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 63/151
Matern–cluster process
Description of the model
Centers of clusters form a stationary Poisson process
(with intensity λ0 > 0)
Cluster points are within a disc of radius R > 0 (aroundthe cluster center)
Inside these discs stationary Poisson processes arerealized (with intensity λ1 > 0)
Spatial interaction between points (mutual attraction,clustering of points)
Three–parametric model (with parameters λ0
, λ1
and R)
Sollerhaus–Workshop, March 2006 21
More advanced models

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 64/151
Gibbs point processes
1. Define Gibbs processes via conditional intensities:
Sollerhaus–Workshop, March 2006 22
More advanced models

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 65/151
Gibbs point processes
1. Define Gibbs processes via conditional intensities:
For each location u ∈ 2 and for each realization
x
= {x1, x2,...} of the point process X
= {X 1, X 2,...},consider the value λ(u,x) ≥ 0,
Sollerhaus–Workshop, March 2006 22
More advanced models

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 66/151
Gibbs point processes
1. Define Gibbs processes via conditional intensities:
For each location u ∈ 2 and for each realization
x
= {x1, x2,...} of the point process X
= {X 1, X 2,...},consider the value λ(u,x) ≥ 0,
where λ(u,x) du is the conditional probability thatX has a point in du, given the positions of all pointsx \ {u} of X outside of the infinitesimal region du
Sollerhaus–Workshop, March 2006 22
More advanced models

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 67/151
Gibbs point processes
1. Define Gibbs processes via conditional intensities:
For each location u ∈ 2 and for each realization
x
= {x1, x2,...} of the point process X
= {X 1, X 2,...},consider the value λ(u,x) ≥ 0,
where λ(u,x) du is the conditional probability thatX has a point in du, given the positions of all pointsx \ {u} of X outside of the infinitesimal region du
2. Special cases
stationary Poisson process: λ(u,x
) = λ
Sollerhaus–Workshop, March 2006 22
More advanced models

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 68/151
Gibbs point processes
1. Define Gibbs processes via conditional intensities:
For each location u ∈ 2 and for each realization
x
= {x1, x2,...} of the point process X
= {X 1, X 2,...},consider the value λ(u,x) ≥ 0,
where λ(u,x) du is the conditional probability thatX has a point in du, given the positions of all pointsx \ {u} of X outside of the infinitesimal region du
2. Special cases
stationary Poisson process: λ(u,x
) = λgeneral Poisson process: λ(u,x) = λ(u)
Sollerhaus–Workshop, March 2006 22
More advanced models

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 69/151
Gibbs point processes
1. Define Gibbs processes via conditional intensities:
For each location u ∈ 2 and for each realization
x
= {x1, x2,...} of the point process X
= {X 1, X 2,...},consider the value λ(u,x) ≥ 0,
where λ(u,x) du is the conditional probability thatX has a point in du, given the positions of all pointsx \ {u} of X outside of the infinitesimal region du
2. Special cases
stationary Poisson process: λ(u,
x
) = λgeneral Poisson process: λ(u,x) = λ(u)
Stationary Strauss process λ(u,x) = λγ t(u,x), where
t(u,x) = #{n : |u − xn| < r} is the number of pointsin x = {xn} that have a distance from u less than r
Sollerhaus–Workshop, March 2006 22
More advanced models

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 70/151
Strauss process
3 Properties of the Strauss process with conditional
intensity λ(u,x) = λγ t(u,x)
Sollerhaus–Workshop, March 2006 23
More advanced models

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 71/151
Strauss process
3 Properties of the Strauss process with conditional
intensity λ(u,x) = λγ t(u,x)
γ ∈ [0, 1] is the interaction parameter, and r > 0 theinteraction radius
Sollerhaus–Workshop, March 2006 23
More advanced models

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 72/151
Strauss process
3 Properties of the Strauss process with conditional
intensity λ(u,x) = λγ t(u,x)
γ ∈ [0, 1] is the interaction parameter, and r > 0 theinteraction radius
Three-parametric model (with parameters λ, γ, r)
Sollerhaus–Workshop, March 2006 23
More advanced models

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 73/151
Strauss process
3 Properties of the Strauss process with conditional
intensity λ(u,x) = λγ t(u,x)
γ ∈ [0, 1] is the interaction parameter, and r > 0 theinteraction radius
Three-parametric model (with parameters λ, γ, r)
4 Special cases:If γ = 1, then λ(u,x) = λ (Poisson process)
Sollerhaus–Workshop, March 2006 23
More advanced models

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 74/151
Strauss process
3 Properties of the Strauss process with conditional
intensity λ(u,x) = λγ t(u,x)
γ ∈ [0, 1] is the interaction parameter, and r > 0 theinteraction radius
Three-parametric model (with parameters λ, γ, r)
4 Special cases:If γ = 1, then λ(u,x) = λ (Poisson process)
If γ = 0, then hardcore process
λ(u,x) = 0 for t(u,x) > 0
λ for t(u,x) = 0
Sollerhaus–Workshop, March 2006 23
More advanced models

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 75/151
Strauss process
3 Properties of the Strauss process with conditional
intensity λ(u,x) = λγ t(u,x)
γ ∈ [0, 1] is the interaction parameter, and r > 0 theinteraction radius
Three-parametric model (with parameters λ, γ, r)
4 Special cases:If γ = 1, then λ(u,x) = λ (Poisson process)
If γ = 0, then hardcore process
λ(u,x) = 0 for t(u,x) > 0
λ for t(u,x) = 0
If 0 < γ < 1, then softcore process (repulsion)Sollerhaus–Workshop, March 2006 23
More advanced models

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 76/151
Strauss processes in bounded sets
Probability density w.r.t. stationary Poisson processes=> simulation algorithm
Sollerhaus–Workshop, March 2006 24
More advanced models

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 77/151
Strauss processes in bounded sets
Probability density w.r.t. stationary Poisson processes=> simulation algorithm
Consider an open bounded set W ⊂
2
, a Straussprocess X in W , and a (stationary) Poisson processXPoi in W with
X Poi(W ) = 1
Sollerhaus–Workshop, March 2006 24
More advanced modelsS i b d d

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 78/151
Strauss processes in bounded sets
Probability density w.r.t. stationary Poisson processes=> simulation algorithm
Consider an open bounded set W ⊂
2
, a Straussprocess X in W , and a (stationary) Poisson processXPoi in W with
X Poi(W ) = 1
Then,
(X ∈ A) = A f (x)
(XPoi ∈ dx) for some (local)probability density f (x) with
Sollerhaus–Workshop, March 2006 24
More advanced modelsS i b d d

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 79/151
Strauss processes in bounded sets
Probability density w.r.t. stationary Poisson processes=> simulation algorithm
Consider an open bounded set W ⊂
2
, a Straussprocess X in W , and a (stationary) Poisson processXPoi in W with
X Poi(W ) = 1
Then,
(X ∈ A) = A f (x)
(XPoi ∈ dx) for some (local)probability density f (x) with
f (x
) ∼ λ
n(x)
γ
s(x)
Sollerhaus–Workshop, March 2006 24
More advanced modelsS i b d d

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 80/151
Strauss processes in bounded sets
Probability density w.r.t. stationary Poisson processes=> simulation algorithm
Consider an open bounded set W ⊂
2
, a Straussprocess X in W , and a (stationary) Poisson processXPoi in W with
X Poi(W ) = 1
Then,
(X ∈ A) = A f (x)
(XPoi ∈ dx) for some (local)probability density f (x) with
f (x
) ∼ λ
n(x)
γ
s(x)
where n(x) is the number of points of x ⊂ W , and
Sollerhaus–Workshop, March 2006 24
More advanced modelsSt i b d d t

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 81/151
Strauss processes in bounded sets
Probability density w.r.t. stationary Poisson processes=> simulation algorithm
Consider an open bounded set W ⊂
2
, a Straussprocess X in W , and a (stationary) Poisson processXPoi in W with
X Poi(W ) = 1
Then,
(X ∈ A) = A f (x)
(XPoi ∈ dx) for some (local)probability density f (x) with
f (x
) ∼ λ
n(x)
γ
s(x)
where n(x) is the number of points of x ⊂ W , and
s(x) the number of pairs x, x ∈ x with |x − x| < r
Sollerhaus–Workshop, March 2006 24
More advanced modelsSt i b d d t

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 82/151
Strauss processes in bounded sets
MCMC simulation by spatial birth-and-death processes
Sollerhaus–Workshop, March 2006 25
More advanced modelsSt i b d d t

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 83/151
Strauss processes in bounded sets
MCMC simulation by spatial birth-and-death processes
a)
Initial configuration
b)
Birth of a point
Sollerhaus–Workshop, March 2006 25
More advanced modelsSt i b d d t

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 84/151
Strauss processes in bounded sets
MCMC simulation by spatial birth-and-death processes
a)
Initial configuration
b)
Birth of a point
c)
Birth of another point
d)
Death of a pointSollerhaus–Workshop, March 2006 25
More advanced modelsSt h d

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 85/151
Strauss hardcore process
1. Definition of Strauss hardcore processes:
Sollerhaus–Workshop, March 2006 26
More advanced modelsStra ss hardcore process

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 86/151
Strauss hardcore process
1. Definition of Strauss hardcore processes:
For some λ, γ, r, R > 0 with r < R, the conditionalintensity λ(u,x) is given by
λ(u,x) =
0 if tr(u,x) > 0
λγ tR(u,x) if tr(u,x) = 0
where ts(u,x) = #{n : |u − xn| < s}
Sollerhaus–Workshop, March 2006 26
More advanced modelsStrauss hardcore process

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 87/151
Strauss hardcore process
1. Definition of Strauss hardcore processes:
For some λ, γ, r, R > 0 with r < R, the conditionalintensity λ(u,x) is given by
λ(u,x) =
0 if tr(u,x) > 0
λγ tR(u,x) if tr(u,x) = 0
where ts(u,x) = #{n : |u − xn| < s}
2. Properties:
Sollerhaus–Workshop, March 2006 26
More advanced modelsStrauss hardcore process

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 88/151
Strauss hardcore process
1. Definition of Strauss hardcore processes:
For some λ, γ, r, R > 0 with r < R, the conditionalintensity λ(u,x) is given by
λ(u,x) =
0 if tr(u,x) > 0
λγ tR(u,x) if tr(u,x) = 0
where ts(u,x) = #{n : |u − xn| < s}
2. Properties:
Minimal interpoint distance r (hardcore radius r/2)
Sollerhaus–Workshop, March 2006 26
More advanced modelsStrauss hardcore process

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 89/151
Strauss hardcore process
1. Definition of Strauss hardcore processes:
For some λ, γ, r, R > 0 with r < R, the conditionalintensity λ(u,x) is given by
λ(u,x) =
0 if tr(u,x) > 0
λγ tR(u,x) if tr(u,x) = 0
where ts(u,x) = #{n : |u − xn| < s}
2. Properties:
Minimal interpoint distance r (hardcore radius r/2)(r, R) = interval of interaction distances(attraction/clustering if γ > 1, repulsion if γ < 1)
Sollerhaus–Workshop, March 2006 26
More advanced modelsStrauss hardcore process

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 90/151
Strauss hardcore process
1. Definition of Strauss hardcore processes:
For some λ, γ, r, R > 0 with r < R, the conditionalintensity λ(u,x) is given by
λ(u,x) =
0 if tr(u,x) > 0
λγ tR(u,x) if tr(u,x) = 0
where ts(u,x) = #{n : |u − xn| < s}
2. Properties:
Minimal interpoint distance r (hardcore radius r/2)(r, R) = interval of interaction distances(attraction/clustering if γ > 1, repulsion if γ < 1)
Four-parametric model (with parameters λ, γ, r, R)Sollerhaus–Workshop, March 2006 26
More advanced modelsStrauss hardcore processes in bounded sets

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 91/151
Strauss hardcore processes in bounded sets
Probability density f (x) w.r.t. stationary Poisson
process in an open bounded set W ⊂ 2:
(X ∈ A) = A
f (x)
(XPoi ∈ dx)
Sollerhaus–Workshop, March 2006 27
More advanced modelsStrauss hardcore processes in bounded sets

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 92/151
Strauss hardcore processes in bounded sets
Probability density f (x) w.r.t. stationary Poisson
process in an open bounded set W ⊂ 2:
(X ∈ A) = A
f (x)
(XPoi ∈ dx)
MCMC simulation by spatial birth-and-death processes
Sollerhaus–Workshop, March 2006 27
More advanced modelsStrauss hardcore processes in bounded sets

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 93/151
Strauss hardcore processes in bounded sets
Probability density f (x) w.r.t. stationary Poisson
process in an open bounded set W ⊂ 2:
(X ∈ A) = A
f (x)
(XPoi ∈ dx)
MCMC simulation by spatial birth-and-death processes
Initial configuration Death of a point Death of another point
Sollerhaus–Workshop, March 2006 27
Characteristics of point processesIntensity measure

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 94/151
Intensity measure
Consider an arbitrary point process {X 1, X 2, . . .} ⊂ 2
Sollerhaus–Workshop, March 2006 28
Characteristics of point processesIntensity measure

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 95/151
Intensity measure
Consider an arbitrary point process {X 1, X 2, . . .} ⊂ 2
Intensity measure Λ(B) =
X (B)
Sollerhaus–Workshop, March 2006 28
Characteristics of point processesIntensity measure

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 96/151
Intensity measure
Consider an arbitrary point process {X 1, X 2, . . .} ⊂ 2
Intensity measure Λ(B) =
X (B)
Stationary case Λ(B) = λ|B|, where λ = intensity
Sollerhaus–Workshop, March 2006 28
Characteristics of point processesIntensity measure

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 97/151
Intensity measure
Consider an arbitrary point process {X 1, X 2, . . .} ⊂ 2
Intensity measure Λ(B) =
X (B)
Stationary case Λ(B) = λ|B|, where λ = intensity
λ = 0.01 λ = 0.1Sollerhaus–Workshop, March 2006 28
Characteristics of point processesFactorial moment measure; product density

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 98/151
Factorial moment measure; product density
Consider the second-order factorial moment measureα(2) : B (
2) ⊗ B ( 2) → [0, ∞] with
Sollerhaus–Workshop, March 2006 29
Characteristics of point processesFactorial moment measure; product density

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 99/151
Factorial moment measure; product density
Consider the second-order factorial moment measureα(2) : B (
2) ⊗ B ( 2) → [0, ∞] with
α(2)
(B1 × B2) =
#{(i, j) : X i ∈ B1, X j ∈ B2 ∀ i = j}
Sollerhaus–Workshop, March 2006 29
Characteristics of point processesFactorial moment measure; product density

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 100/151
Factorial moment measure; product density
Consider the second-order factorial moment measureα(2) : B (
2) ⊗ B ( 2) → [0, ∞] with
α(2)
(B1 × B2) =
#{(i, j) : X i ∈ B1, X j ∈ B2 ∀ i = j}Then
X (B1)X (B2)
= α(2)(B1 × B2) + Λ(B1 ∩ B2)
Sollerhaus–Workshop, March 2006 29
Characteristics of point processesFactorial moment measure; product density

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 101/151
Factorial moment measure; product density
Consider the second-order factorial moment measureα(2) : B (
2) ⊗ B ( 2) → [0, ∞] with
α(2)
(B1 × B2) =
#{(i, j) : X i ∈ B1, X j ∈ B2 ∀ i = j}Then
X (B1)X (B2)
= α(2)(B1 × B2) + Λ(B1 ∩ B2)
and VarX (B) = α(2)
(B × B) + Λ(B) − Λ(B)2
Sollerhaus–Workshop, March 2006 29
Characteristics of point processesFactorial moment measure; product density

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 102/151
Factorial moment measure; product density
Consider the second-order factorial moment measureα(2) : B (
2) ⊗ B ( 2) → [0, ∞] with
α(2)
(B1 × B2) =
#{(i, j) : X i ∈ B1, X j ∈ B2 ∀ i = j}Then
X (B1)X (B2)
= α(2)(B1 × B2) + Λ(B1 ∩ B2)
and VarX (B) = α(2)
(B × B) + Λ(B) − Λ(B)2Often α(2)(B1 × B2) =
B1
B2
ρ(2)(u1, u2) du1 du2
ρ
(2)
(u1, u2) = product density
Sollerhaus–Workshop, March 2006 29
Characteristics of point processesFactorial moment measure; product density

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 103/151
Factorial moment measure; product density
Consider the second-order factorial moment measureα(2) : B (
2) ⊗ B ( 2) → [0, ∞] with
α(2)
(B1 × B2) =
#{(i, j) : X i ∈ B1, X j ∈ B2 ∀ i = j}Then
X (B1)X (B2)
= α(2)(B1 × B2) + Λ(B1 ∩ B2)
and VarX (B) = α(2)
(B × B) + Λ(B) − Λ(B)2Often α(2)(B1 × B2) =
B1
B2
ρ(2)(u1, u2) du1 du2
ρ
(2)
(u1, u2) = product densityρ(2)(u1, u2) du1 du2 ≈ probability that in each of the setsdu1, du2 there is at least one point of {X n}
Sollerhaus–Workshop, March 2006 29
Characteristics of point processesFactorial moment measure; product density

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 104/151
Factorial moment measure; product density
Consider the second-order factorial moment measureα(2) : B (
2) ⊗ B ( 2) → [0, ∞] with
α(2)
(B1 × B2) =
#{(i, j) : X i ∈ B1, X j ∈ B2 ∀ i = j}Then
X (B1)X (B2)
= α(2)(B1 × B2) + Λ(B1 ∩ B2)
and VarX (B) = α(2)
(B × B) + Λ(B) − Λ(B)2Often α(2)(B1 × B2) =
B1
B2
ρ(2)(u1, u2) du1 du2
ρ
(2)
(u1, u2) = product densityρ(2)(u1, u2) du1 du2 ≈ probability that in each of the setsdu1, du2 there is at least one point of {X n}
In the stationary case: ρ(2)(u1, u2) = ρ(2)(u1 − u2)Sollerhaus–Workshop, March 2006 29
Characteristics of motion-invariant point processePair correlation function

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 105/151
Pair correlation function
For stationary and isotropic point processes:
ρ(2)(u1, u2) = ρ(2)(s) where s = |u1 − u2|
Sollerhaus–Workshop, March 2006 30
Characteristics of motion-invariant point processePair correlation function

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 106/151
Pair correlation function
For stationary and isotropic point processes:
ρ(2)(u1, u2) = ρ(2)(s) where s = |u1 − u2|
In the Poisson case: ρ(2)(s) = λ2
Sollerhaus–Workshop, March 2006 30
Characteristics of motion-invariant point processePair correlation function

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 107/151
Pair correlation function
For stationary and isotropic point processes:
ρ(2)(u1, u2) = ρ(2)(s) where s = |u1 − u2|
In the Poisson case: ρ(2)(s) = λ2
Pair correlation function: g(s) = ρ(2)(s) / λ2
Sollerhaus–Workshop, March 2006 30
Characteristics of motion-invariant point processePair correlation function

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 108/151
a co e at o u ct o
For stationary and isotropic point processes:
ρ(2)(u1, u2) = ρ(2)(s) where s = |u1 − u2|
In the Poisson case: ρ(2)(s) = λ2
Pair correlation function: g(s) = ρ(2)(s) / λ2
Examples: Poisson case: g(s) ≡ 1
Sollerhaus–Workshop, March 2006 30
Characteristics of motion-invariant point processePair correlation function

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 109/151
For stationary and isotropic point processes:
ρ(2)(u1, u2) = ρ(2)(s) where s = |u1 − u2|
In the Poisson case: ρ(2)(s) = λ2
Pair correlation function: g(s) = ρ(2)(s) / λ2
Examples: Poisson case: g(s) ≡ 1
whereas g(s) > (<)1 indicates clustering (repulsion)
Sollerhaus–Workshop, March 2006 30
Characteristics of motion-invariant point processePair correlation function

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 110/151
For stationary and isotropic point processes:
ρ(2)(u1, u2) = ρ(2)(s) where s = |u1 − u2|
In the Poisson case: ρ(2)(s) = λ2
Pair correlation function: g(s) = ρ(2)(s) / λ2
Examples: Poisson case: g(s) ≡ 1
whereas g(s) > (<)1 indicates clustering (repulsion)
Matern-cluster process g(s) > 1 for s ≤ 2R
Sollerhaus–Workshop, March 2006 30
Characteristics of motion-invariant point processePair correlation function

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 111/151
For stationary and isotropic point processes:
ρ(2)(u1, u2) = ρ(2)(s) where s = |u1 − u2|
In the Poisson case: ρ(2)(s) = λ2
Pair correlation function: g(s) = ρ(2)(s) / λ2
Examples: Poisson case: g(s) ≡ 1
whereas g(s) > (<)1 indicates clustering (repulsion)
Matern-cluster process g(s) > 1 for s ≤ 2R
Hardcore processes g(s) = 0 for s < dmin
where dmin = minimal interpoint distanceSollerhaus–Workshop, March 2006 30
Characteristics of motion-invariant point processeReduced moment measure; Ripley’s K-function

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 112/151
; p y
Instead of using ρ(2)(s) or g(s), we can write
α(2)(B1 × B2) = λ2
B1
K(B2 − u) du
where λ2K(B) =
B ρ(2)(x) dx
Sollerhaus–Workshop, March 2006 31
Characteristics of motion-invariant point processeReduced moment measure; Ripley’s K-function

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 113/151
; p y
Instead of using ρ(2)(s) or g(s), we can write
α(2)(B1 × B2) = λ2
B1
K(B2 − u) du
where λ2K(B) =
B ρ(2)(x) dx
Furthermore, K (s) = K(Bs(o)) is Ripley’s K-function,
where Bs(o) = {u ∈ R
2
: |u| ≤ s} for s > 0
Sollerhaus–Workshop, March 2006 31
Characteristics of motion-invariant point processeReduced moment measure; Ripley’s K-function

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 114/151
p y
Instead of using ρ(2)(s) or g(s), we can write
α(2)(B1 × B2) = λ2
B1
K(B2 − u) du
where λ2K(B) =
B ρ(2)(x) dx
Furthermore, K (s) = K(Bs(o)) is Ripley’s K-function,
where Bs(o) = {u ∈ R
2
: |u| ≤ s} for s > 0
λK (s) = mean number of points within a ball of radius scentred at the „typical” point of {X n}, which itself is not
counted =⇒ K = reduced moment measure
Sollerhaus–Workshop, March 2006 31
Characteristics of motion-invariant point processeReduced moment measure; Ripley’s K-function

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 115/151
p y
Instead of using ρ(2)(s) or g(s), we can write
α(2)(B1 × B2) = λ2
B1
K(B2 − u) du
where λ2K(B) =
B ρ(2)(x) dx
Furthermore, K (s) = K(Bs(o)) is Ripley’s K-function,
where Bs(o) = {u ∈ R
2
: |u| ≤ s} for s > 0
λK (s) = mean number of points within a ball of radius scentred at the „typical” point of {X n}, which itself is not
counted =⇒ K = reduced moment measure
In the Poisson case: K (s) = πs2 (= |Bs(o)|)
Sollerhaus–Workshop, March 2006 31
Characteristics of motion-invariant point processeReduced moment measure; Ripley’s K-function

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 116/151
y
Instead of using ρ(2)(s) or g(s), we can write
α(2)(B1 × B2) = λ2
B1
K(B2 − u) du
where λ2K(B) =
B ρ(2)(x) dx
Furthermore, K (s) = K(Bs(o)) is Ripley’s K-function,
where Bs(o) = {u ∈ R
2
: |u| ≤ s} for s > 0
λK (s) = mean number of points within a ball of radius scentred at the „typical” point of {X n}, which itself is not
counted =⇒ K = reduced moment measure
In the Poisson case: K (s) = πs2 (= |Bs(o)|)
Thus, K (s) > (<)πs2 indicates clustering (repulsion)Sollerhaus–Workshop, March 2006 31
Characteristics of motion-invariant point processeOther functions

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 117/151
Spherical contact distribution function
H (s) = 1 −
X (Bs(o)) = 0
, s > 0
Sollerhaus–Workshop, March 2006 32
Characteristics of motion-invariant point processeOther functions

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 118/151
Spherical contact distribution function
H (s) = 1 −
X (Bs(o)) = 0
, s > 0
Nearest-neighbor distance distribution function
D(s) = 1 − limε↓0
X (Bs(o) \ Bε(o)) = 0 | X (Bε(o)) > 0
Sollerhaus–Workshop, March 2006 32
Characteristics of motion-invariant point processeOther functions

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 119/151
Spherical contact distribution function
H (s) = 1 −
X (Bs(o)) = 0
, s > 0
Nearest-neighbor distance distribution function
D(s) = 1 − limε↓0
X (Bs(o) \ Bε(o)) = 0 | X (Bε(o)) > 0
The J-function is then defined by
J (s) =
1 − D(s)
1 − H (s) for any s > 0 with H (s) < 1
Sollerhaus–Workshop, March 2006 32
Characteristics of motion-invariant point processeOther functions

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 120/151
Spherical contact distribution function
H (s) = 1 −
X (Bs(o)) = 0
, s > 0
Nearest-neighbor distance distribution function
D(s) = 1 − limε↓0
X (Bs(o) \ Bε(o)) = 0 | X (Bε(o)) > 0
The J-function is then defined by
J (s) =
1 − D(s)
1 − H (s) for any s > 0 with H (s) < 1
In the Poisson case: J (s) ≡ 1
Sollerhaus–Workshop, March 2006 32
Characteristics of motion-invariant point processeOther functions

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 121/151
Spherical contact distribution function
H (s) = 1 −
X (Bs(o)) = 0
, s > 0
Nearest-neighbor distance distribution function
D(s) = 1 − limε↓0
X (Bs(o) \ Bε(o)) = 0 | X (Bε(o)) > 0
The J-function is then defined by
J (s) =
1 − D(s)
1 − H (s) for any s > 0 with H (s) < 1
In the Poisson case: J (s) ≡ 1
whereas J (s) > (<)1 indicates clustering (repulsion)Sollerhaus–Workshop, March 2006 32
Estimation of model characteristicsIntensity

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 122/151
Suppose that
the point process {X n} is stationary with intensity λ
Sollerhaus–Workshop, March 2006 33
Estimation of model characteristicsIntensity

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 123/151
Suppose that
the point process {X n} is stationary with intensity λ
and can be observed in the bounded samplingwindow W ⊂
2
Sollerhaus–Workshop, March 2006 33
Estimation of model characteristicsIntensity

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 124/151
Suppose that
the point process {X n} is stationary with intensity λ
and can be observed in the bounded samplingwindow W ⊂
2
Then, λ = X (W )/|W | is a natural estimator for λ
Sollerhaus–Workshop, March 2006 33
Estimation of model characteristicsIntensity

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 125/151
Suppose that
the point process {X n} is stationary with intensity λ
and can be observed in the bounded samplingwindow W ⊂
2
Then, λ = X (W )/|W | is a natural estimator for λ
Properties:
λ is unbiased, i.e.,
λ = λ
Sollerhaus–Workshop, March 2006 33
Estimation of model characteristicsIntensity

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 126/151
Suppose that
the point process {X n} is stationary with intensity λ
and can be observed in the bounded samplingwindow W ⊂
2
Then, λ = X (W )/|W | is a natural estimator for λ
Properties:
λ is unbiased, i.e.,
λ = λ
If {X n} is ergodic, then
λ → λ with probability 1
(as |W | → ∞), i.e.
λ is strongly consistent
Sollerhaus–Workshop, March 2006 33
Estimation of model characteristicsK-function

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 127/151
Recall that λK (s) = mean number of points within a ball ofradius s centered at the „typical” point of {X n}, which itselfis not counted
Sollerhaus–Workshop, March 2006 34
Estimation of model characteristicsK-function

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 128/151
Recall that λK (s) = mean number of points within a ball ofradius s centered at the „typical” point of {X n}, which itselfis not counted
Edge effects occurring in the estimation of λK (r)Sollerhaus–Workshop, March 2006 34
Estimation of model characteristicsK-function

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 129/151
Therefore, estimation of λ2K (s) = Bs(o) ρ(2)(x) dx
by „weighted” average
Sollerhaus–Workshop, March 2006 35
Estimation of model characteristicsK-function

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 130/151
Therefore, estimation of λ2K (s) = Bs(o) ρ(2)(x) dx
by „weighted” average
Edge-corrected estimator for λ2K (s):
λ2K (s) =
X i,X j∈W,i= j
1(|X i − X j| < s)
|(W + X i) ∩ (W + X j )|
Sollerhaus–Workshop, March 2006 35
Estimation of model characteristicsK-function

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 131/151
Therefore, estimation of λ2K (s) = Bs(o) ρ(2)(x) dx
by „weighted” average
Edge-corrected estimator for λ2K (s):
λ2K (s) =
X i,X j∈W,i= j
1(|X i − X j| < s)
|(W + X i) ∩ (W + X j )|
Notice that λ2K (s) is unbiased, i.e., λ2K (s) = λ2K (s)
Sollerhaus–Workshop, March 2006 35
Estimation of model characteristicsK-function

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 132/151
Therefore, estimation of λ2K (s) = Bs(o) ρ(2)(x) dx
by „weighted” average
Edge-corrected estimator for λ2K (s):
λ2K (s) =
X i,X j∈W,i= j
1(|X i − X j| < s)
|(W + X i) ∩ (W + X j )|
Notice that λ2K (s) is unbiased, i.e., λ2K (s) = λ2K (s)
=> Edge-corrected estimator for K (s): K (s) =
1
λ2
X i,X j∈W, i= j
1(|X i − X j | < s)
|(W + X i) ∩ (W + X j )|
where λ2 = X (W )(X (W ) − 1)/|W |Sollerhaus–Workshop, March 2006 35
Estimation of model characteristicsFurther edge-corrected estimators

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 133/151
Product density ρ(2)(s):
ρ(2)(s) = 1
2πr X i,X j∈W, i= j
k(|X i − X j| − s)
|(W + X i) ∩ (W + X j)|
where k :
→
is some kernel function.
Sollerhaus–Workshop, March 2006 36
Estimation of model characteristicsFurther edge-corrected estimators

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 134/151
Product density ρ(2)(s):
ρ(2)(s) = 1
2πr X i,X j∈W, i= j
k(|X i − X j| − s)
|(W + X i) ∩ (W + X j)|
where k :
→
is some kernel function.
Pair correlation function g(s):
g(s) =
ρ(2)(s)/
λ2
Sollerhaus–Workshop, March 2006 36
Estimation of model characteristicsFurther edge-corrected estimators

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 135/151
Product density ρ(2)(s):
ρ(2)(s) = 1
2πr X i,X j∈W, i= j
k(|X i − X j| − s)
|(W + X i) ∩ (W + X j)|
where k :
→
is some kernel function.
Pair correlation function g(s):
g(s) =
ρ(2)(s)/
λ2
where λ2 = X (W )(X (W ) − 1)/|W |
Sollerhaus–Workshop, March 2006 36
Estimation of model characteristicsFurther edge-corrected estimators

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 136/151
Spherical contact distribution function H (s):
H (s) =|W Bs(o) ∪
X n∈W Bs(X n)|
|W Bs(o)|
Sollerhaus–Workshop, March 2006 37
Estimation of model characteristicsFurther edge-corrected estimators

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 137/151
Spherical contact distribution function H (s):
H (s) =|W Bs(o) ∪
X n∈W Bs(X n)|
|W Bs(o)|
Nearest-neighbor distance distribution function
D(s):
D(s) = X n∈W
1(X n ∈ W Bd(X n)(o)) 1(d(X n) < s)|W Bd(X n)(o)|
Sollerhaus–Workshop, March 2006 37
Estimation of model characteristicsFurther edge-corrected estimators

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 138/151
Spherical contact distribution function H (s):
H (s) =|W Bs(o) ∪
X n∈W Bs(X n)|
|W Bs(o)|
Nearest-neighbor distance distribution function
D(s):
D(s) = X n∈W
1(X n ∈ W Bd(X n)(o)) 1(d(X n) < s)|W Bd(X n)(o)|
where d(X n) is the distance from X n to its nearestneighbor
Sollerhaus–Workshop, March 2006 37
Maximum pseudolikelihood estimationBerman-Turner device

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 139/151
Suppose that
{X n} is a Gibbs process with conditional intensityλθ(u,x) which depends on some parameter θ
Sollerhaus–Workshop, March 2006 38
Maximum pseudolikelihood estimationBerman-Turner device

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 140/151
Suppose that
{X n} is a Gibbs process with conditional intensityλθ(u,x) which depends on some parameter θ
and that the realization x = {x1, . . . , xn} ⊂ W of {X n}is observed
Sollerhaus–Workshop, March 2006 38
Maximum pseudolikelihood estimationBerman-Turner device

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 141/151
Suppose that
{X n} is a Gibbs process with conditional intensityλθ(u,x) which depends on some parameter θ
and that the realization x = {x1, . . . , xn} ⊂ W of {X n}is observed
Consider the pseudolikelihood
PL(θ;x) =n
i=1
λθ(xi,x) exp− W
λθ(u,x) du
Sollerhaus–Workshop, March 2006 38
Maximum pseudolikelihood estimationBerman-Turner device

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 142/151
Suppose that
{X n} is a Gibbs process with conditional intensityλθ(u,x) which depends on some parameter θ
and that the realization x = {x1, . . . , xn} ⊂ W of {X n}is observed
Consider the pseudolikelihood
PL(θ;x) =n
i=1
λθ(xi,x) exp− W
λθ(u,x) duThe maximum pseudolikelihood estimate
θ of θ is the
value which maximizes PL(θ;x)
Sollerhaus–Workshop, March 2006 38
Maximum pseudolikelihood estimationBerman-Turner device

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 143/151
To determine the maximum θ, discretise the integral
W
λθ
(u,x) du ≈m
j=1
w j
λθ
(u j
,x)
Sollerhaus–Workshop, March 2006 39
Maximum pseudolikelihood estimationBerman-Turner device

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 144/151
To determine the maximum θ, discretise the integral
W
λθ
(u,x) du ≈m
j=1
w j
λθ
(u j
,x)
where u j ∈ W are „quadrature points” and w j ≥ 0 the
associated „quadrature weights”
Sollerhaus–Workshop, March 2006 39
Maximum pseudolikelihood estimationBerman-Turner device

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 145/151
To determine the maximum θ, discretise the integral
W
λθ
(u,x) du ≈m
j=1
w j
λθ
(u j
,x)
where u j ∈ W are „quadrature points” and w j ≥ 0 the
associated „quadrature weights”
The Berman-Turner device involves choosing a set ofquadrature points {u j }
Sollerhaus–Workshop, March 2006 39
Maximum pseudolikelihood estimationBerman-Turner device

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 146/151
To determine the maximum θ, discretise the integral
W
λθ
(u,x) du ≈m
j=1
w j
λθ
(u j
,x)
where u j ∈ W are „quadrature points” and w j ≥ 0 the
associated „quadrature weights”
The Berman-Turner device involves choosing a set ofquadrature points {u j }
which includes all the data points x j as well as some„dummy” points
Sollerhaus–Workshop, March 2006 39
Maximum pseudolikelihood estimationBerman-Turner device

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 147/151
To determine the maximum θ, discretise the integral
W
λθ
(u,x) du ≈m
j=1
w j
λθ
(u j
,x)
where u j ∈ W are „quadrature points” and w j ≥ 0 the
associated „quadrature weights”
The Berman-Turner device involves choosing a set ofquadrature points {u j }
which includes all the data points x j as well as some„dummy” points
Let z j = 1 if u j is a data point, and z j = 0 if u j is a
dummy pointSollerhaus–Workshop, March 2006 39
Maximum pseudolikelihood estimationBerman-Turner device

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 148/151
Then
log PL(θ;x) =m
j=1z j log λθ(u j ,x) − w j λθ(u j ,x)=
m
j=1
w j(y j log λ j − λ j)
where y j = z j /w j and λ j = λθ(u j,x)
Sollerhaus–Workshop, March 2006 40
Maximum pseudolikelihood estimationBerman-Turner device

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 149/151
Then
log PL(θ;x) =m
j=1z j log λθ(u j ,x) − w j λθ(u j ,x)=
m
j=1
w j(y j log λ j − λ j)
where y j = z j /w j and λ j = λθ(u j,x)
This is the log likelihood of m independent Poissonrandom variables Y j with means λ j and responses y j.
Sollerhaus–Workshop, March 2006 40
Maximum pseudolikelihood estimationBerman-Turner device

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 150/151
Then
log PL(θ;x) =m
j=1z j log λθ(u j ,x) − w j λθ(u j ,x)=
m
j=1
w j(y j log λ j − λ j)
where y j = z j /w j and λ j = λθ(u j,x)
This is the log likelihood of m independent Poissonrandom variables Y j with means λ j and responses y j.
Thus, standard statistical software for fitting
generalized linear models can be used to compute θSollerhaus–Workshop, March 2006 40
References

8/13/2019 Sh Schmidt
http://slidepdf.com/reader/full/sh-schmidt 151/151
A. Baddeley, P. Gregori, J. Mateu, R. Stoica, D. Stoyan (eds.): Case Studies in
Spatial Point Process Modeling . Lecture Notes in Statistics 185, Springer, New York
2006.
J. Moeller, R.P. Waagepetersen: Statistical Inference and Simulation for Spatial Point
Processes . Monographs on Statistics and Applied Probability 100, Chapman and
Hall, Boca Raton 2004.
D. Stoyan, W.S. Kendall, J. Mecke: Stochastic Geometry and Its Applications
(2nd ed.). J. Wiley & Sons, Chichester 1995.
D. Stoyan, H. Stoyan: Fractals, Random Shapes and Point Fields . J. Wiley & Sons,
Chichester 1994.