Embed Size (px)
Citation preview

111
Servo and Stepper Motors
Contents
Description Page
Servo Drive & Controller Technical Specs 112-117
SI Programming 118-122
MMI-01 123-125
Motor/Torque Curves 127-130
Dimensions 131-134
Planetary Gearbox – OSP-E..BHD 135-137
Planetary Gearbox –OSP-E Belt & Ballscrew 138-140
74726 ORIG0C OSP-E Cat. 107-146 7/25/02, 11:57 AM111

112
Typical Single Axis System With Servo Drive and ControllerConnected to a Host Computer…
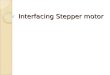
Typical Single Axis System With Control and Drive in a SinglePackage Connected to a Host Computer…
Single AxisMachine
MotorController
OUTPUT SIGNAL TO MACHINE OR AUXILLARY DEVICE
INPUT SIGNAL FROM MACHINE OR AUXILLARY DEVICE
motorcurrent
HostComputer
I/O status
high levelcommand
Stepper Motor
Single AxisMachine
OUTPUT SIGNAL TO MACHINE OR AUXILLARY DEVICE
INPUT SIGNAL FROM MACHINE OR AUXILLARY DEVICE
pulse &direction
signal
motorcurrent
Servo AmpMotorController(Si-100)
HostComputer
I/O status
high levelcommand
Servo Motor
74726 ORIG0C OSP-E Cat. 107-146 7/25/02, 11:57 AM112

113
74726 ORIG0C OSP-E Cat. 107-146 7/25/02, 11:57 AM113

114
POWER AMPLIFIER (MOTOR DRIVE) SECTION:AMPLIFIER TYPE .............................................. MOSFET, dual H-Bridge.CURRENT CONTROL ......................................... 3 state, pulse width modulated, switching at 20KHz.OUTPUT CURRENT ........................................... 0.2 to 3.5 amps: software selectable DC BUS VOLTAGE ............................................. 80 VDC.AC INPUT VOLTAGE .......................................... 110 or 220 VAC (switch selectable) 50–60 Hz.MAXIMUM OUTPUT POWER ............................ 122 Watts.IDLE CURRENT REDUCTION ............................ 0%, 25%, 50%, or 100% software selectable.MOTOR RESOLUTION ....................................... 13 resolutions. 2000, 5000, 10000, 12800, 18000, 20000,
21600, 25000, 25400, 25600, 36000, 50000, 50800.
CONTROLLER (INDEXER) SECTION: (see page 100 for Si program information)SERIAL COMMUNICATION ............................... RS-232 programming port.STATUS LED'S .................................................. DC power (red), Overtemp (yellow) and Short (yellow).INPUTS ............................................................. 8 user programmable inputs.
OUTPUTS .......................................................... 3 optically isolated outputs.PARAMETER RANGES ...................................... Distance: 1 to 16,000,000 steps. Speed: .025 to 50 revolutions per sec-
ond (in any microstep resolution). Acceleration: 1 to 3,000 rev/sec/sec.Deceleration: 1 to 3,000 rev/sec/sec (set independently from accelera-tion). Time Delays: .01 to 300 seconds. Output Pulse Widths: 2 to 500milliseconds. Iterations per loop: 1 to 65,535.
OPTIONAL OPERATOR INTERFACE (MMI) ....... NEMA 4/12 rated (splash proof & dust proof). 4 x 20 characters liquidcrystal display (LCD). 20 key membrane keypad. Overall size: 4.9 x 4.9 x1.42 inches.
SYSTEM SPECIFICATIONS:OVERALL SIZE .................................................. 2.25 x 7.80 x 5.40 inches.CHASSIS MATERIAL ......................................... Aluminum, black anodized with integral heat sink.WEIGHT ............................................................. 4 lbs.AMBIENT TEMPERATURE ................................. 0˚ to 50˚C (32˚ to 122˚F).HUMIDITY ......................................................... Maximum of 90% non-condensing.CONNECTORS ................................................... Screw terminal connectors for input power and motor, and I/O signals.MOTORS ........................................................... Can drive 4, 6 or 8 lead motors, NEMA sizes 14–42.CASE ................................................................. Steel with black paint and white epoxy silk screen. Integral heat sink,
mounting brackets & switch covers included.AGENCY APPROVAL ......................................... CE & TUV.
Technical Specifications - SI3540
• 2 dedicated limit switch inputs.• 4 general purpose inputs. Can be used for Feed to Sensor moves, homing,
branching and triggering.• 2 jog inputs, can also be used as general purpose inputs.
74726 ORIG0C OSP-E Cat. 107-146 7/25/02, 11:57 AM114

115
POWER AMPLIFIER (MOTOR DRIVE) SECTION:AMPLIFIER TYPE .............................................. MOSFET, dual H-Bridge.CURRENT CONTROL ......................................... 3 state, pulse width modulated, switching at 20KHz.OUTPUT CURRENT ........................................... 0.5 to 5.5 amps: software selectable DC BUS VOLTAGE ............................................. 80 VDC.AC INPUT VOLTAGE .......................................... 110 or 220 VAC (switch selectable) 50–60 Hz.MAXIMUM OUTPUT POWER ............................ 440 Watts.PROTECTION CIRCUITS ................................... Short circuit and over temperature.IDLE CURRENT REDUCTION ............................ 0%, 25%, 50%, or 100% software selectable.MOTOR RESOLUTION ....................................... 13 resolutions. 2000, 5000, 10000, 12800, 18000, 20000,
21600, 25000, 25400, 25600, 36000, 50000, 50800.
CONTROLLER (INDEXER) SECTION: (see page 100 for Si program information)SERIAL COMMUNICATION ............................... RS-232 programming port.STATUS LED'S .................................................. DC power (red), Overtemp (yellow) and Short (yellow).INPUTS ............................................................. 8 user programmable inputs.
OUTPUTS .......................................................... 3 optically isolated outputs.PARAMETER RANGES ...................................... Distance: 1 to 16,000,000 steps. Speed: .025 to 50 revolutions per sec-
ond (in any microstep resolution). Acceleration: 1 to 3,000 rev/sec/sec.Deceleration: 1 to 3,000 rev/sec/sec (set independently from accelera-tion). Time Delays: .01 to 300 seconds. Output Pulse Widths: 2 to 500milliseconds. Iterations per loop: 1 to 65,535.
OPTIONAL OPERATOR INTERFACE (MMI) ....... NEMA 4/12 rated (splash proof & dust proof). 4 x 20 characters liquidcrystal display (LCD). 20 key membrane keypad. Overall size: 4.9 x 4.9 x1.42 inches.
SYSTEM SPECIFICATIONS:OVERALL SIZE .................................................. 3 x 8 x 5.3 inches.CHASSIS MATERIAL ......................................... Aluminum, black anodized with integral heat sink.WEIGHT ............................................................. 7.8 lbs.AMBIENT TEMPERATURE ................................. 0˚ to 50˚C (32˚ to 122˚F).HUMIDITY ......................................................... Maximum of 90% non-condensing.CONNECTORS ................................................... Screw terminal connectors for input power and motor, and I/O signals.MOTORS ........................................................... Can drive 4, 6 or 8 lead motors, NEMA sizes 14–42.CASE ................................................................. Steel with black paint and white epoxy silk screen. Integral heat sink,
mounting brackets & switch covers included.AGENCY APPROVAL ......................................... CE & TUV.
Technical Specifications - SI5580
• 2 dedicated limit switch inputs.• 4 general purpose inputs. Can be used for Feed to Sensor moves, homing,
branching and triggering.• 2 jog inputs, can also be used as general purpose inputs.
74726 ORIG0C OSP-E Cat. 107-146 7/25/02, 11:58 AM115

116
Si-100
74726 ORIG0C OSP-E Cat. 107-146 7/25/02, 11:58 AM116

117
AC INPUT POWER............................................. 110 or 220 VAC (switch selectable), 50–60 Hz.
MOTOR RESOLUTION ....................................... 16 resolutions. Steps per revolution with 1.8˚ motor: 200, 400, 1000,2000, 5000, 10000, 12800, 18000, 20000, 21600, 25000, 25400, 25600,36000, 50000, 50800.
STEP AND DIRECTION OUTPUTS ..................... 2 sourcing outputs (step+ and dir+) and 2 sinking outputs (step– anddir–). Step+ and dir+ are 2.5min., 3.4V typ. with a 20na load. Step– anddir– are 8.5V max., 0.3V typ. with a 20ma load. The step frequency is50Hz to 2.54MHz. The step duty cycle is 50% and the step rate is up-dated at 12,800Hz.
POWER SUPPLY OUTPUTS .............................. 5 and 24 VDC., 100ma max. The 24 VDC supply is isolated from the in-ternal circuitry. The 5 VDC supply is not. Each supply is protected by aself resetting fuse.
SERIAL COMMUNICATION ............................... RS-232 programming port.STATUS LED'S .................................................. Two color, normal (green), limit (red).INPUTS ............................................................. 8 inputs, 5–24 VDC, bidirectional, optically isolated.
2 dedicated limit switch inputs.4 dedicated general purpose inputs (for triggering, sensing & programbranching).2 JOG inputs (cw and ccw) can be also used as general purpose inputs.
OUTPUTS .......................................................... 3 general purpose, optically isolated outputs for interfacing to otherequipment. Can be set to a high or low voltage or programmed to send apulse by the Set Output instruction.
PARAMETER RANGES ...................................... Distance: 1 to 16,000,000 steps. Speed: .025 to 50 revolutions per sec-ond (in any microstep resolution). Acceleration: 1 to 3,000 rev/sec/sec.Deceleration: 1 to 3,000 rev/sec/sec (set independently from accelera-tion). Time Delays: .01 to 300 seconds. Output Pulse Widths: 2 to 500milliseconds. Iterations per loop: 1 to 65,535.
OPTIONAL OPERATOR INTERFACE (MMI) ....... NEMA 4X rated (splash proof & dust proof). 4 x 20 characters liquidcrystal display (LCD). 20 key membrane keypad. Overall size: 4.9 x 4.9 x1.42 inches.
SYSTEM SPECIFICATIONS:
OVERALL SIZE .................................................. 1.25 x 4 x 8 inches. See mechanical outline.CASE MATERIAL ............................................... Steel, finished with black textured paint and white silk screen.WEIGHT ............................................................. 2 lbs.AMBIENT TEMPERATURE ................................. 0˚ to 50˚C (32˚ to 122˚F).HUMIDITY ......................................................... Maximum of 90% non-condensing.CONNECTORS ................................................... Screw terminal connectors for input power and I/O signals.DRIVES .............................................................. Indexer for step and direction compatible stepper and brushless DC drives.AGENCY APPROVAL ......................................... CE & TUV.
Technical Specifications
74726 ORIG0C OSP-E Cat. 107-146 7/25/02, 11:59 AM117

118
SI Programming
Si Programming Screens
74726 ORIG0C OSP-E Cat. 107-146 7/25/02, 11:59 AM118

119
INDEXER PROGRAMMING:Programmable by RS-232 connection toIBM compatible PC running Windows 3.1,Windows 95, Windows 98 or Windown NT.Programming software and cable included.Programming is very easy to learn and re-quires no previous programming experience.
Programs can be up to 100 lines long.Instructions are powerful, so 100 lines canprovide the user with a sophisticated pro-gram. For example, in one program line themotor can be moved until a sensor changesstate, then fed a precise distance to a stop,delayed and returned to the starting point.Distances, delays, feed and return speeds,acceleration and deceleration parameters areall included in the single program line. Thesame move can take 10 program lines ormore on other indexers.
There are a total of 20 different instruc-tions, including input/output, branches,loops and motion commands. These in-structions can be combined to make anearly infinite variety of programs, meetingthe demands of a wide range of applications.
As you compose your program, you cantest it by downloading to a drive and execut-ing. A sophisticated control panel allows youto observe the status input and output ter-
Si Software Specifications
minals in real time, highlights the instructiothat’s executing, and allows you to pauseand single step the program.
You can even emulate the optional ManMachine Interface on-screen. This allowsyou to try out the MMI before buying one,and eliminates the need to swap cables be-tween the PC and MMI while you’re testingyour program.
You can also write programs without adrive connected to your PC and save themto your hard disk.
Once programmed, the cable can be removed and the indexer-drive will run standalone. Programs and parameters are storedinternally in nonvolatile memory. Uponpower up, the drive automatically senses thconnection to the Windows programmingsoftware. If no connection is detected, theprogram is automatically executed startingon line 1.
All Si products support an optionalNEMA 4X operator interface (MMI) that al-lows the operator to enter variables such aspeeds, distances and repeat counts. TheMMI attaches to the RS-232 programmingport, leaving all inputs and outputs free.
A CNC hand wheel is also available, al-lowing a machine operator to precise posi-tion a motor and load.
Typical Dialog Box(for setting Feed to Length instruction)
Main Programming Screen
74726 ORIG0C OSP-E Cat. 107-146 7/25/02, 11:59 AM119

120
Microstep resolution2000-50800 steps/rev
Motor Current& Idle Current
Jog Input Settings(speed, accel rate)
Jog inputs can be assigned to other uses
CommunicationPort Setting
Limit Switch Options: normally open, normally closed, or not used & available for other uses
user defined units(inches, mm, degrees, etc)
Program WindowIndexer-Drive Type
Button to accesssupport information
Indexer-DriveFirmware Level
Indexer-Drive Control Buttons
Features of the Main Programming Screen
Features of the Program Control Panel
Virtual MMI
Program Control
Status of Inputs
Status of Outputs
74726 ORIG0C OSP-E Cat. 107-146 7/25/02, 11:59 AM120

121
Feed to LengthA point to point move. Parameters are dis-tance, direction, speed, accel and decel.Can also change speeds at a specified dis-tance within the move.
Feed & ReturnA point to point move that returns to thestarting point after specified delay. Param-eters include distance, feed speed, returnspeed, direction, accel, decel, and return de-lay time.
Feed to PositionA move to an absolute position. Parametersare position, speed, accel and decel.
Feed & Set OutputA point to point move. An output terminalcan be turned on or off during the move, orcan be turned on, off or pulsed at the end ofthe move.
Feed to SensorMoves the motor until an input (to which asensor is connected) changes state, thenstops at a specified distance beyond thesensor. Useful for applications like dispens-ing labels or moving objects on a conveyer.A safety distance can be given; if the motormoves beyond that distance without reach-ing the sensor, the motor stops and the pro-gram branches to a specified line.
Feed to Sensor & ReturnSame as Feed to Sensor, but returns to theoriginal starting point. Additional parametersare return speed and return delay time.
Set Abs PositionAssign a value, such as 0 inches, or 10 mm,to the present motor position.
Seek HomePositions the motor at a home sensor (wiredto one of the general purpose inputs)“bouncing off” the limits if necessary.
Si Program Instructions
74726 ORIG0C OSP-E Cat. 107-146 7/25/02, 12:00 PM121

122
Wait TimeDelays a specified amount of time. Range is.01 to 300 seconds. Adding a loop aroundthis instruction can extend the delay time toas much as 18 hours.
Wait InputPauses the program until an input, or set ofinputs, reaches a given condition. The joginputs are functional during this instruction.The Wait Input instruction can also display aprompt on the optional MMI and pause untilthe operator presses the ENTER key.
Hand WheelAllows the operator to precisely position themotor and load using an optional CNC handwheel.
MMI PromptDisplays a prompt on the optional man-ma-chine interface (MMI) panel and accepts aparameter from the operator. This param-eter is saved in nonvolatile memory and canbe used as a move speed, move distance orrepeat loop count. Speeds and distancescan be entered in user defined units such asinches or gallons. The MMI Prompt instruc-tion also allows the operator to choose asub program from a menu of up to 8 subprograms.
Go ToForces program to jump to a specific in-struction. At the least, you’ll need one ofthese at the end of your program to returnexecution to the beginning.
If InputCauses the program to branch to a givenline number if an input, or set of inputs,meets a specified condition. The If Input in-struction can also display a prompt on theoptional MMI and branch if the operatorpresses the YES key.
Set OutputSet a given output to a high or low voltagestate, or can emit a high or low pulse of 2 to500 milliseconds. This instruction is usefulfor triggering other motor controllers, relaysor cut-off knives. It can also be used to sig-nal events to another indexer or PLC.
CommentAllows the user to document the program byadding comments. Comments stay with theprogram even when downloaded to the drive.
RepeatThe beginning of a loop. Repeat a block ofinstructions a fixed number of times (up to65,535 times). Loops can be extended bynesting loops around each other (two nestedloops allow you to repeat the instructionswithin them more than 4 billion times).
End RepeatMarks the end of a repeat loop. The pro-gramming software matches these up foryou automatically. You don’t have to specifya line number. Connections are showngraphically on the screen.
Reset Repeat LoopResets a repeat loop counter to 0. Usefulfor resetting a loop that has been prema-turely terminated by an If Input instruction.
Change CurrentAllows the program to turn off the motorcurrent, resume the previous current level,or change the current setting anytime.
Si Program Instructions
74726 ORIG0C OSP-E Cat. 107-146 7/25/02, 12:00 PM122

123
The MMI-01 is an easy to use, flexible device thatallows an operator to enter move speeds, movedistances or repeat loop counts. Messages can alsobe displayed and the program can be paused until theuser presses a key, such as ENTER, YES or NO.Program branching can be accomplished based onthe response of YES or NO.
The MMI-01 is compact, easy to install and carriesa NEMA 4/12 rating. (The 4 x 20 character display and20 key membrane keypad are sealed.)
Connection to an Si5580 or 7080i indexer drive isaccomplished by the standard programming cablethat is supplied with every drive. This cable alsosupplies power to the MMI-01 so that no additionalpower supply or wiring is needed.
Setup and programming of the MMI-01 is fast andeasy. The Si5580 and 7080i indexer drives arefurnished with the Si™ Programmer software, whichallows the user to easily program instructions for theterminal. Complex, confusing items like baud rate,parity and cursor positioning are handled automati-cally by the software.
On screen emulation of the MMI-01 by the Si™Programmer software allows a potential user to trythe MMI before purchasing one.
Features• Ideal operator interface for Si5580 and 7080i
indexer drives.• Connects directly to Si5580 and 7080i indexer
drives using the standard programming cable. Nospecial wiring required.
• Power is supplied by the drive - no additionalpower supply required.
• Easy to program using Si™ Programmer software.• Can also be used with
MC8400 machine control-ler/drive.
• 4 line, 20 character/line LCDdisplay
• 20 key keypad• NEMA 4/12 rating
(dustproof and drip proofwhen properly mounted)
• Can be surfaced mountedor flush mounted (NEMA 4/12 rating for flush mount-ing only)
MMI-01
4.90
4.90 1.38
0.133.875CENTERED
3.875CENTERED 1 2 3 › ›
4 5 6 › ›7 8 9 YES NO
. 0 SPACE BKSP ENTER
2.988
1.975
0.425
0.963
0.960
MECHANICAL OUTLINE
Programming from Si5580 or 7080i• Easy to program using Si™ Programmer software,
running on Windows 3.1 or Windows 95.• Six functions are available: 1) Display a message,
up to 60 characters 2) Display a message andpause program until operator presses ENTER key.3) Display a message, wait for operator to pressYES or NO key. branch program on YES. 4)Display message, allow operator to enter a loopcount. 5) Display message, allow operator to entera speed 6) Display message, allow operator toenter a distance
• Speeds, distances and loop counts entered by theoperator can be stored in any of eight nonvolatilememory locations for use in repeat loops andmotor moves.
Operator Interface
74726 ORIG0C OSP-E Cat. 107-146 7/25/02, 12:00 PM123

124
There are two ways to mount the MMI-01 in your application. No matter which method you choose,you’ll need to connect the MMI-01 to your indexer-drive with the programming cable. You will not,however, need the adapter plug. The MMI-01 has the same telephone style connector as the 7080iand Si5580 drives.
Depending on how you mount the MMI-01 and cable in your application, you may find that it isdifficult to remove the cable from the back of the MMI-01. If this is the case, and you need to repro-gram the 7080i, you can use any telephone line cord as a programming cable. They are available atmost supermarkets and discount stores. Please be careful not to lose the adapter plug that connectsthe telephone cord to the COM port of your PC. The adapter is a custom made part and is only avail-able from Hoerbiger-Origa.
FLUSH MOUNTING When you remove the MMI-01 fromthe shipping carton, you will notice that it has two parts. Thefirst is a fairly thin section that contains the keypad, displayand some circuit boards. The other part is thicker and con-tains the telephone jack and a cable that connects to the thinpart.
When you flush mount the MMI-01 in a panel, only thethin section will stick out from your panel—the large portionmounts behind your panel. You’ll need to cut a precise sec-tion from your panel. There is a cardboard template in yourbox for this purpose.
If you want the MMI-01 to be dust proof and watertight,you must place the black rubber gasket between the thin art ofthe MMI-01 and your panel. Assemble the two halves usingthe eight small screws.
SURFACE MOUNTING An easier way to mount the MMI-01is to bolt the two halves together ahead of time, using theeight small screws. If you want the MMI-01 to be dust proofand watertight, put the black rubber gasket between the twohalves before screwing them together.
Then cut a hole in your panel for the cable that runs be-tween the MMI-01 and the drive. The hole must be at least5/8" in diameter for the connector to fit through. You willalso need two holes that line up with the big mounting holesin the MMI-01. The mechanical outline on page 96 showsthe location of the big mounting holes.
When you mount the MMI-01 to your panel, you willneed to use some kind of sealant to keep dust and liquid out.Silicone or latex caulking is okay, or you can make your owngasket from a sheet of compliant material rubber or RTV.
panel
MMI(front sectionand gasket)
MMI(rear section)
panel
sealant (not included)
MMI
gasket(included)
Mounting the Optional MMI-01
74726 ORIG0C OSP-E Cat. 107-146 7/25/02, 12:00 PM124

125
Multi-Axis HubSingle RS-232 serial port
Description
The SiNet™ Hub-8 allows up to 8 indexer-drives tobe controlled from a single RS-232 serial port of aPC or PLC.
Each indexer-drive acquires a unique address fromthe port to which it is connected. This simple ad-dressing scheme minimizes the cost of the drives,and more importantly, the cost of configuring and/orreplacing drives in your system. Connections aremade with low cost, reliable telephone cabling.
Any of our popular, cost effective Si™ indexers orindexer-drives can be used with the SiNet™ Hub-8,including the stand alone Si-100 indexer, the DC input7080i and 3540i indexer-drives, and the Si3540 andSi5580 indexer-drives with built-in power supply. Bychoosing the power level and features you need foreach axis of your application, SiNet™ saves youmoney.
The SiNet™ Hub-8 is powered by the drive that's con-nected to port #1, saving you the cost and installationexpense of a separate power supply.
Our SiNet™ Command Language consists of approxi-mately 50 commands allowing a host PC or PLC toexecute relative, absolute and homing moves, makestatus inquires, sample inputs, set outputs, and more.
If your application requires just one indexer-drive tooperate in "host mode", you can connect any of theabove mentioned drives directly to your PC and in-voke the SiNet™ Command Language by respondingto a simple power up request from the drive.
Multi-Axis Stand Alone Mode
Our SiNet Programmer™ Windows software will al-low you to create and store multi-axis motion controlprograms in the SiNet™ Hub-8 and run them withoutthe PC. This new software brings the innovative easeof use and productivity of our Si Programmer™ singleaxis software to multi-axis applications. Call us foravailability.
BLOCK DIAGRAM
MECHANICAL OUTLINE
SiNet™
Hub-8
drive #1
drive #2
drive #8
HostPCor
PLC
1
2
3
4
5
6
7
8
PC/MMI
SiNet™ Hub-8
5.54"
6.50"
3.79"
6.00"
2X Ø 0.19
1.35"
0.125"
Multi-Axis Hub
74726 ORIG0C OSP-E Cat. 107-146 7/25/02, 12:00 PM125

126
Servo and Stepper Motors
Servo Drive
Servo Motor
Stepper Motorsand Controllers
74726 ORIG0C OSP-E Cat. 107-146 7/25/02, 12:00 PM126

127
Motor/TorqueCurves
3540 Series Torque Curves
0 5 10 15 20 25 300
20
40
60
80
100
120
5023-168 MOTORMotor Connection: parallelDrive Setting: 2.5 A/phase
40 volt supply24 volt supply
Torq
ue (
oz-i
n)
Revolutions/Second
0 10 20 30 40 500
30
60
90
120
150
5034-367 MOTORMotor Connection: parallelDrive Setting: 3.5 A/phase
40 volt supply24 volt supply
Torq
ue (
oz-i
n)
Revolutions/Second
0 10 20 30 40 500
50
100
150
200
5023-169 MOTORMotor Connection: parallelDrive Setting: 3.5 A/phase
40 volt supply24 volt supply
Torq
ue (
oz-i
n)
Revolutions/Second
74726 ORIG0C OSP-E Cat. 107-146 7/25/02, 12:00 PM127

128
5034-368 MOTORMotor Connection: parallelDrive Setting: 5.0 A/phase
PulloutTorque(oz-in)
Power(watts)
TorquePower
0 5 10 15 20 25 30 35 400
50
100
150
250
200
300
0
30
60
90
150
120
180
0 10,000 20,000 30,000 40,000 50,000 60,000 70,000 80,000
Revolutions/second1/10th Steps/second
5034-369 MOTORMotor Connection: parallelDrive Setting: 5.5 A/phase
PulloutTorque(oz-in)
Power(watts)
TorquePower
0 5 10 15 20 25 30 35 400
100
200
300
400
50
150
250
350
0
60
120
180
240
30
90
150
210
0 10,000 20,000 30,000 40,000 50,000 60,000 70,000 80,000
Revolutions/second1/10th Steps/second
5580 Series Torque CurvesFull steps/sec = Rev/sec X 200. 1/10th Steps/sec = Rev/sec x 2,000.
0 5 10 15 20 25 30 35 40100
200
300
400
500
600
5042-034 MOTORMotor Connection: ParallelDrive Setting: 5.5A/Phase
DynamicTorque(oz-in)
Revolutions/secondFull Steps/secondHalf Steps/second
0 2,000 4,000 6,000 8,0000 20,000
1,00010,000 40,000 60,000 80,000
3,000 5,000 7,00030,000 50,000 70,000
5023-168 MOTORMotor Connection: parallelDrive Setting: 2.5 A/phase
PulloutTorque(oz-in)
Power(watts)
TorquePower
0 5 10 15 20 25 30 35 400
20
40
60
80
120
100
0
20
40
60
80
120
100
0 10,000 20,000 30,000 40,000 50,000 60,000 70,000 80,000
Revolutions/second1/10th Steps/second
5023-169 MOTORMotor Connection: parallelDrive Setting: 3.5 A/phase
PulloutTorque(oz-in)
Power(watts)
TorquePower
0 5 10 15 20 25 30 35 400
100
150
50
200
0
60
90
30
120
0 10,000 20,000 30,000 40,000 50,000 60,000 70,000 80,000
Revolutions/second1/10th Steps/second
74726 ORIG0C OSP-E Cat. 107-146 7/25/02, 12:00 PM128

129
Motor Dimension Drawings - Stepper Motors
.75.81± .03
A.190
.060
2 x Ø.2500 +.0000–.0005
Ø1.5 ± .002
#6-32 UNC-2B Thdx 0.25 DP (3) equally spacedon Ø1.865 BC
2 X 2.222 X 1.856
4 X Ø.205 ± .01
10' shielded cable w/connector
60˚
MOUNTINGEND
SIZE 23 FRAMEMODEL* A
(motor length)5023-167 2.05023-168 3.05023-169 4.0
2 X 3.26
10' shielded cable w/connectorØ2.875± .002
4 X Ø.216± .01
2 X 2.74
A
1.19 ± .04.19
.0631.19 ± .03
Ø 3.38MAX
2 X Ø.3750+.0000–.0005
30˚
#6-32 UNC-2B Thdx 0.25 equally spacedon Ø2.952 BC
SIZE 34 FRAMEMODEL* A
(motor length)5034-367 2.55034-368 3.75034-369 6.1
MAX
2 X 4.20MAX
Ø2.186±.002
4 X Ø.28±.01
2 X 3.50Ø4.26 MAX
Ø.6248+.0000–.0006
Ø.5000+.0000–.0005
.062
1.25 ± .08
A
30ϒ
.32
1⁄2 - 14 NPT1.38 ± .05
10' shielded cable w/connector
4 x 6-32 UNC-2bthru equallyspaced onØ2.925 BC
SIZE 42 FRAMEMODEL* A
(motor length)5042-034 7.7
* Part numbers listed are for single shaft. To order double shaft add “D” to the end.
74726 ORIG0C OSP-E Cat. 107-146 7/25/02, 12:00 PM129

130
MOTORCONNECTION Minimum
Motor Holding Rotor Motor1 = series Length Torque Step Inertia Weight
Part # 2 = parallel (inches) (oz-in) Leads Angle Volts Amps Ohms mH (oz-in2/G-CM2) (Lbs.)
*5023-168 1 3.0 141.0 8 1.8 5.9 1.26 4.6 18.8 1.14/210 2.002 3.0 141.0 8 1.8 3.0 2.52 1.2 4.7 1.14/210 2.00
*5023-169 1 4.0 212.0 8 1.8 5.7 1.75 3.3 16.8 1.72/315 2.802 4.0 212.0 8 1.8 2.8 3.29 0.8 4.2 1.72/315 2.80
*5034-368 1 3.7 424.0 8 1.8 3.5 3.24 1.0 11.6 6.72/1230 5.402 3.7 424.0 8 1.8 1.8 7.07 0.3 2.9 6.72/1230 5.40
*5034-369 1 5.1 636.0 8 1.8 3.5 4.17 0.8 10.4 10.2/1870 7.702 5.1 636.0 8 1.8 1.8 8.34 0.2 2.6 10.2/1870 7.70
*5042-034 1 5.1 1591.0 8 1.8 3.8 6.70 0.6 7.6 10.2/1870 7.702 5.1 1591.0 8 1.8 1.9 13.40 0.1 1.9 10.2/1870 7.70
OTHER LENGTHS AND WINDINGS AVAILABLE UPON REQUEST
Part numbers listed are for single shaft. To order double shaft add "D" to the end.
*Optimized for microstepping and use with 160 volt drives
74726 ORIG0C OSP-E Cat. 107-146 7/25/02, 12:00 PM130

131
Notes:1. Dimensions in mm (inches)2. Tolerances, unless otherwise specified: Angle dimension ±1°, XX decimal places ± .38 (.015), XXX decimal places ± .127 (.005)3. Motor receptacles can be rotated.
Amplifier
DIMENSIONS MT150x - SERVO MOTOR
Model "A" Max. "B" Ref "C" Ref "D" "E" Key Lengthw/brake w/o brake w/brake w/o brake w/brake w/o brake NEMA 23 NEMA 23 NEMA 23
MT(B)1506 205.23 (8.080) 160.03 (6.301) 186.97 (7.361) 141.94 (5.588) 277.11 (10.91) 231.90 (9.13) (.3750) (1.502) no keyway
74726 ORIG0C OSP-E Cat. 107-146 7/25/02, 12:03 PM131

132
Notes:1. Dimensions in mm (inches)2. Tolerances, unless otherwise specified: Angle dimension ±1°, XX decimal places ± .38 (.015), XXX decimal places ± .127 (.005)3. Connectors rotate for models MT302. DIM "B" is too small for cable bend radius. Rotate connector 35° MIN.
DIMENSIONS MT30x - SERVO MOTOR
Model "A" Max. "B" Min. "D" "E" "F" Key Lengthw/brake w/o brake w/brake w/o brake NEMA 34 NEMA 34 NEMA 34 NEMA 34
MT(B)304 183.1 (7.210) 137.7 (5.420) 82.67 (3.255) 37.46 (1.475) (.3745-.3750) 73.00 31.75 No keyway
MT(B)306 198.6 (7.820) 153.2 (6.030) 98.16 (3.865) 52.95 (2.085) (.4995-.5000) 73.00 31.75 19
MT(B)308 231.7 (9.120) 186.2 (7.330) 131.2 (5.165) 85.97 (3.385) (.4995-.5000) 73.00 31.75 19
Stall Rated Peak Rated Std.Torque Torque Torque Speed Inertia Weight
Servo Motor Nm Nm Nm RPM Kgm2 kg
MT1506A 1.35 1.35 4.62 6000 0.0000294 2.3
MT304A 2.64 2.64 7.4 3000 0.0000808 4.3
MT304B 2.45 2.45 5.9 6000 0.0000808 4.3
MT306A 3.54 3.54 11.48 2500 0.000111 4.8
MT306B 3.5 3.5 11.52 4600 0.000111 4.8
MT308A 5.04 5.04 19.16 1500 0.0001749 6.1
MT308B 5.04 5.04 19.12 3000 0.0001749 6.1
74726 ORIG0C OSP-E Cat. 107-146 7/25/02, 12:03 PM132

133
Motor Mounting
A A
MOUNT ASSEMBLY(TYPE MAS or MAI)
MOTOR
MOUNT ASSEMBLY(TYPE MES or MEI)
MOTOR
Motor Mount Size Type Motor Type A C D E
MES-2504 25 Belt Metric 04 95.7 70 70 70
MES-3204 32 Belt Metric 04 86.7 70 70 70
MES-5004 50 Belt Metric 04 86.7 70 90 70
MES-5008 50 Belt Metric 08 114.7 90 90 90
MEI-2523 25 Belt Nema 23 76.7 70 70 70
MEI-3234 32 Belt Nema 34 88.7 90 70 90
MEI-5034 50 Belt Nema 34 83 90 90 90
MGM-3234 32 Belt Nema 34 88.7 90 70 90
MGM-5034 50 Belt Nema 34 88.7 90 90 90
MAS-2501 25 Screw Metric 01 51.4 42 42 42
MAS-3204 32 Screw Metric 04 86.7 70 70 70
MAS-5004P 50 Screw Metric 04P** 88.7 90 90 90
MAS-5008 50 Screw Metric 08 88.7 90 90 90
MAI-2517 25 Screw Nema 17 51.4 42 42 42
MAI-3223 32 Screw Nema 23 76.7 70 70 70
MAI-5034 50 Screw Nema 34 88.7 90 90 90
MAS-5008P 50 Screw Metric 08P** 88.7 120 90 120
MEI-5042 50 Belt Nema 42 88.7 120 90 120
MAI-3101 32 Screw Nema 34 86.7 90 70 90
MAI-3234 32 Screw Nema 34 86.7 90 70 90
MEI-3223 32 Belt Nema 23 76.7 70 70 70
MAI-2523 25 Screw Nema 23 51.4 70 42 70
MGM-3223 32 Belt Nema 23 76.7 70 70 70
MGM-5034S 50 Screw Nema 34 88.7 90 90 90
MGM-3223S 32 Screw Nema 23 86.7 70 70 70
MES-3208 32 Belt Metric 08 88.7 90 90 90
Dimensions are for reference purposes onlyNema mounts match IMS stepper motors or equivalentMetric mounts match Yaskawa SGM Servo motors or equivalent*Drilled & counterbored for 4-40 socket head cap screw from opposite sideMGM = Gearbox mount
The coupling housing is the mounting base forthe motor and includes a self aligning coupling.
Motor flanges and couplings suitable for theavailable range of servo and stepper motorswill be found together with technical data anddimensions on motors and drives, see separatedata sheet.
C D E
A
74726 ORIG0C OSP-E Cat. 107-146 7/25/02, 12:03 PM133

134
Motor Mount Size Type Motor Type G H J K
MES-2504 25 Belt Metric 04 10-32 UNF 70 50 3.5
MES-3204 32 Belt Metric 04 10-32 UNF 70 50 3.5
MES-5004 50 Belt Metric 04 10-32 UNF 70 50 3.5
MES-5008 50 Belt Metric 08 10-32 UNF 90 70 3.5
MEI-2523 25 Belt Nema 23 10-32 UNF 66.68 38.1 2
MEI-3234 32 Belt Nema 34 10-32 UNF 98.42 73.08 2
MEI-5034 50 Belt Nema 34 10-32 UNF 98.42 73.08 2
MGM-3234 32 Belt Nema 34 10-32 UNF 98.42 73.08 2
MGM-5034 50 Belt Nema 34 10-32 UNF 98.42 73.08 2
MAS-2501 25 Screw Metric 01 M4 46 30 3
MAS-3204 32 Screw Metric 04 10-32 UNF 70 50 3.5
MAS-5004P 50 Screw Metric 04P** 10-32 UNF 90 70 3.5
MAS-5008 50 Screw Metric 08 10-32 UNF 90 70 3.5
MAI-2517 25 Screw Nema 17 * 43.8 22 2.5
MAI-3223 32 Screw Nema 23 10-32 UNF 66.68 38.1 2
MAI-5034 50 Screw Nema 34 10-32 UNF 98.42 73.08 2
MAS-5008P 50 Screw Metric 08P** M8 X125 145 110 4
MEI-5042 50 Belt Nema 42 .25-20 UNC 127 55.58 2
MAI-3101 32 Screw Nema 34 10-32 UNF 98.42 73.08 2
MAI-3234 32 Screw Nema 34 10-32 UNF 98.42 73.08 2
MEI-3223 32 Belt Nema 23 10-32 UNF 66.68 38.1 2
MAI-2523 25 Screw Nema 23 10-32 UNF 66.68 38.1 2
MGM-3223 32 Belt Nema 23 10-32 UNF 66.68 38.1 2
MGM-5034S 50 Screw Nema 34 10-32 UNF 98.42 73.08 2
MGM-3223S 32 Screw Nema 23 10-32 UNF 66.68 38.1 2
MES-3208 32 Belt Metric 08 10-32 UNF 90 70 3.5
"G" x 16mm DEEPx "H" BOLT CIRCLE
øJ COUNTER BORE X "K" DEEPFOR MOTOR PILOT
E
Dimensions are for reference purposes onlyNema mounts match IMS stepper motors or equivalentMetric mounts match Yaskawa SGM Servo motors or equivalent*Drilled & counterbored for 4-40 socket head cap screw from opposite sideMGM = Gearbox mount
74726 ORIG0C OSP-E Cat. 107-146 7/25/02, 12:03 PM134

135
A gearbox-mounting flange allows the LP series gearbox tobe mounted directly to the actuator, eliminating the need fora coupling.
Motor mounting flange and reducing bush are custom madeto suit the motor.
Please specify the motor manufacturer and model whenordering.
Note maximum shaft diameter below!
OSP-E BHD Heavy Duty Belt Gearbox SeriesLP070 LP090 LP120
(BHD25) (BHD32) (BHD50)
32 80 2005:1, 25:1, 50:1
Nm (283) (708) (1770)Nominal Output Torque T2n
(lb-in) 3:1, 10:1, 15:1, 30:1, 15 35 90100:1 (133) (310) (797)
32 80 2005:1, 25:1, 50:1
Nm (283) (708) (1770)Maximum Acceleration Torque T2B
(lb-in) 3:1, 10:1, 15:1, 30:1, 29 72 180100:1 (257) (637) (1593)
Nominal Speed n1max RPM 3700 3400 2600
Maximum Speed n1n RPM 6000 6000 4800
1-stage: 3, 5, 10 < 12Standard Output Backlash j arcmin
2-stage: 15, 25, 30, 50,< 15
100
1.9 4.1 91-stage
kg (4.2) (9) (19.8)Weight m
(lb) 2.2 5.1 11.22-stage
(4.9) (11.2) (24.7)
0.28 1.77 5.421-stage
kgcm2 (0.096) (0.604) (1.85)Mass Moment of Inertia J1
(lb-in2) 0.28 1.78 5.492-stage
(0.096) (0.608) (1.874)
mm 16 24 32Maximum Motor Shaft Diameter
(ins) 0.6299 0.9448 1.2598
1-stage: 3, 5, 10Ratios Available
2-stage: 15, 25, 30, 50, 100
1-stage: >97%Efficiency at Load
2-stage: >95%
Average Lifetime 20,000 hours
Lubrication Flow Grease
Protection Rating IP 64
PLANETARY GEARBOX FOR THEOSP-E BHD HEAVY DUTY ACTUATOR
74726 ORIG0C OSP-E Cat. 107-146 7/25/02, 12:03 PM135

136
Gearbox
LP Series
Type Available L W Weight
LP 070*Single Stage 3, 5, 10 103 70 3.3Double Stage 25, 50, 100 123 70 3.6
LP 090*Single Stage 3, 5, 10 125 90 5.5Double Stage 25, 50, 100 151.5 90 6.5
LP 120*Single Stage 3, 5, 10 153 120 10.4Double Stage 25, 50, 100 185.5 120 12.6
*LP Gear Heads for use with BHD only
74726 ORIG0C OSP-E Cat. 107-146 7/25/02, 12:03 PM136

137
Gearbox Mounting Flanges -See New Ordering Instructions Position 4 for Shaft Type
Description Reduction Order Number
Planetary Gear LP 070 1-stage I=3:1 80001240
LP 070 1-stage i=5:1 80001252
LP 070 1-stage i=10:1 80001253
LP70 for BHD25 LP 070 2-stage I=15:1 80001242
LP 070 2-stage i=25:1 80001254
LP 070 2-stage I=30:1 80001243
LP 070 2-stage i=50:1 80001255
LP 070 2-stage i=100:1 80001256
LP 090 1-stage I=3:1 80001244
LP 090 1-stage i=5:1 80001216
LP 090 1-stage i=10:1 80001257
LP90 for BHD32 LP 090 2-stage I-15:1 80001245
LP 090 2-stage i=25:1 80001258
LP 090 2-stage I=30:1 80001246
LP 090 2-stage i=50:1 80001259
LP 090 2-stage i=100:1 80001260
LP 120 1-stage I=3:1 80001247
LP 120 1-stage i=5:1 80001250
LP 120 1-stage i=10:1 80001261
LP120 for BHD50 LP 120 2-stage I=15:1 80001248
LP 120 2-stage i=25:1 80001262
LP 120 2-stage I=30:1 80001249
LP 120 2-stage i=50:1 80001263
LP 120 2-stage i=100:1 80001264
Order Number for OSP-E BHD Gearbox
ALWAYS STATE EXACT MOTORTYPE WHEN ORDERING GEAR!
Shaft Type
Gearbox flange to LP70 for BHD25 K,L,M,N 12311
mount the LP series LP90 for BHD32 K,L,M,N 12312
to BHD LP120 for BHD50 K,L,M,N 12313
74726 ORIG0C OSP-E Cat. 107-146 7/25/02, 12:03 PM137

138
OSP-E Belt Gearbox Series EG
143:1, 10:1
Nm (124)Nominal Output Torque T2n
(lb-in) 265:1, 7:1
(230)
253:1, 10:1
Nm (221)Maximum Acceleration Torque T2B
(lb-in) 405:1, 7:1
(354)
Nominal Speed n1max RPM 3500
Maximum Speed n1n RPM 6000
Standard Output Backlash j arcmin 3:1 - 10:1 < 10
kg 1.0Weight m 1-stage
(lb) (2.2)
0.176i = 3
(0.06)kgcm2 0.15
Mass Moment of Inertia J1 i = 5(lb-in2) (0.051)
0.138i = 7,10
(0.047)
Ratios Available 1-stage: 3, 4, 5, 7, 10
Efficiency at Load 1-stage: 90%
Average Lifetime > 20,000 hours
Lubrication Mineral Grease EP0
Protection Rating IP 64
Operating Temperature -20°C to 90°C
A gearbox mounts directly to the actuator, eliminating theneed for a coupling.
A simple adaptor flange and bushing allows NEMA 23 and34 frame motors to be fitted.
The gearbox input shaft connects directly to the motor shaftand is secured using a split-clamping ring.
PLANETARY GEARBOX FOR THEOSP-E BELT ACTUATOR
74726 ORIG0C OSP-E Cat. 107-146 7/25/02, 12:03 PM138

139
Actuator and Type Available L W WeightRatio Max Max Kg
25 Belt/Ball Screw 3, 5, 7, 10NEMA 23 135.3 70 1.3NEMA 34 135.3 85 1.46
32 Belt/Ball Screw 3, 5, 7, 10NEMA 23 139.8 70 1.3NEMA 34 139.8 85 1.46
50 Belt/Ball Screw 3, 5, 7, 10NEMA 23 141.8 70 1.3NEMA 34 141.8 85 1.46
Planetary Gearbox Dimensions
Note: Dimensions below include NEMA 23 or 34 flanges.
Gam Gear Heads have hollow shafts and do not require a Gear Box mount.GAM Gear Heads are not to be used on the BHD model.All above dimensions are for reference only. Consult factory for further details on all Gear Head.
Belt Actuator
74726 ORIG0C OSP-E Cat. 107-146 7/25/02, 12:03 PM139

140
Order Number for OSP-E Belt and Ballscrew Gearbox
Order Numbers Description
25 Belt Actuator
EG00003-B2523A Gearbox 3:1 Ratio 25 Belt .250 motor shaft
EG00005-B2523A Gearbox 5:1 Ratio 25 Belt .250 motor shaft
EG00007-B2523A Gearbox 7:1 Ratio 25 Belt .250 motor shaft
EG00010-B2523A Gearbox 10:1 Ratio 25 Belt .250 motor shaft
EG00003-B2523 Gearbox 3:1 Ratio 25 Belt .375 motor shaft
EG00005-B2523 Gearbox 5:1 Ratio 25 Belt .375 motor shaft
EG00007-B2523 Gearbox 7:1 Ratio 25 Belt .375 motor shaft
EG00010-B2523 Gearbox 10:1 Ratio 25 Belt .375 motor shaft
EG00003-B2534 Gearbox 3:1 Ratio 25 Belt .375 motor shaft
EG00005-B2534 Gearbox 5:1 Ratio 25 Belt .375 motor shaft
EG00007-B2534 Gearbox 7:1 Ratio 25 Belt .375 motor shaft
EG00010-B2534 Gearbox 10:1 Ratio 25 Belt .375 motor shaft
32 Belt Actuator
EG00003-B3223A Gearbox 3:1 Ratio 32 Belt .250 motor shaft
EG00005-B3223A Gearbox 5:1 Ratio 32 Belt .250 motor shaft
EG00007-B3223A Gearbox 7:1 Ratio 32 Belt .250 motor shaft
EG00010-B3223A Gearbox 10:1 Ratio 32 Belt .250 motor shaft
EG00003-B3223 Gearbox 3:1 Ratio 32 Belt .375 motor shaft
EG00005-B3223 Gearbox 5:1 Ratio 32 Belt .375 motor shaft
EG00007-B3223 Gearbox 7:1 Ratio 32 Belt .375 motor shaft
EG00010-B3223 Gearbox 10:1 Ratio 32 Belt .375 motor shaft
EG00003-B3234 Gearbox 3:1 Ratio 32 Belt .375 motor shaft
EG00005-B3234 Gearbox 5:1 Ratio 32 Belt .375 motor shaft
EG00007-B3234 Gearbox 7:1 Ratio 32 Belt .375 motor shaft
EG00010-B3234 Gearbox 10:1 Ratio 32 Belt .375 motor shaft
50 Belt Actuator
EG00003-B5023 Gearbox 3:1 Ratio 50 Belt .375 motor shaft
EG00005-B5023 Gearbox 5:1 Ratio 50 Belt .375 motor shaft
EG00007-B5023 Gearbox 7:1 Ratio 50 Belt .375 motor shaft
EG00010-B5023 Gearbox 10:1 Ratio 50 Belt .375 motor shaft
EG00003-B5034 Gearbox 3:1 Ratio 50 Belt .375 motor shaft
EG00005-B5034 Gearbox 5:1 Ratio 50 Belt .375 motor shaft
EG00007-B5034 Gearbox 7:1 Ratio 50 Belt .375 motor shaft
EG00010-B5034 Gearbox 10:1 Ratio 50 Belt .375 motor shaft
74726 ORIG0C OSP-E Cat. 107-146 7/25/02, 12:03 PM140

141
74726 ORIG0C OSP-E Cat. 107-146 7/25/02, 12:04 PM141