Embed Size (px)
Citation preview
IEEE TRANSACTIONS ON COMPUTERS, VOL. C-22, NO. 4, APRIL 1973
David J. Ladd was born in Los Angeles, Calif.,on October 8, 1946. He received the B.S. de-gree from the University of California, Berkeley,in 1968 and the M.S. degree from StevensInstitute of Technology, Hoboken, N.J., in1971.In 1968, he joined Bell Laboratpries, Murray
Hill, N.J., where he worked on computer sys-tems programming. He is now with SystemsControl, Inc., Palo Alto, Calif., working oncomputer communications and process control
systems.
Gottfried W. R. Luderer (M'64) was bom inWerdau, Germany, on March 3, 1934. He re-ceived the Diplomingenieur and Dr.-Ing. degreesin electrical engineering from the Technical Uni-versity Braunschweig, Braunschweig, West Ger-many, in 1959 and 1964, respectively.At the University of Braunschweig, he held
Teaching and Research Assistantships in thefields of computation and microwave technol-ogy. In 1965 he joined the Computing SciencesDepartment of Bell Laboratories, Whippany,
N.J., where he has been involved in experimental time-sharing systems,interactive graphics, operating systems support, measurements, andoptimization. As Supervisor of a Computing System Evaluation Group,he is concerned with measurement, modeling, analysis, and evaluation oflarge-scale computing systems. He has been a Visiting Senior Lecturerin Computing Science at the Stevens Institute of Technology, Hoboken,N.J.
Dr. Luderer is a member of the IEEE Computer Society, the Asso-ciation for Computing Machinery, and the German technical societiesNachrichtentechnische Gesellschaft and Gesellschaft fur AngewandteMathematik und Mechanik.
Peter E. Rosenfeld wasborn in New York, N.Y.,in 1935. He received the B.E. degree in elec-trical engineering from Brown University, Provi-dence, R.I., in 1957, and the M.S. degree fromHarvard University, Cambridge, Mass., in 1959.Since 1959 he has been employed at Bell
Laboratories, Murray Hill, N.J., where he iscurrently Supervisor of a Computer GraphicsDesign Group.
Ruth L. Salmon received the B.A. degree fromRockford College, Rockford, Ill., in 1954.In 1954 she joined Bell Laboratories, Whip-
pany, N.J. She has been in the Computer Sci-ences Department at the Whippany Laboratorysince 1959. Her work has included support forlarge operating systems, the design and imple-mentation of systems for minicomputers, andexperimental interactive graphics. Currently sheis responsible for the support of STARE and theComputer Output Microfilm equipment used in
the Computer Center.Miss Salmon is a member of COMTEC.
Serial Hybrid Computation and Errorsin Hybrid Loops
WARREN D. LITTLE
Abstract-This paper considers the stability and errors associated withvarious combinations of hybrid simulation modes, sampling sequences,and compensating schemes.
Index Terms-Error compensation, hybrid computation, pole excur-sions, stability contours.
INTRODUCTIONTHE application of hybrid computers to dynamic systemTsimulation is often seriously limited by delays due to the
sampling process and digital computation. Analog and digital
delay compensation has been studied and errors and stabilityof particular systems have been obtained [I] .
In the studies to date, the conventional hybrid mode inwhich both analog and digital computers operate in parallel hasbeen assumed. In this paper a serial hybrid mode is proposedand error and stability results for a class of systems operatingin both hybrid modes are obtained.
HYBRID COMPUTER SIMULATION MODELS
An important application for hybrid computers is the simu-lation of the dynamic model
X = C(v t f (1IManuscript received August 4, 1971; revised September 15, 1972, - v-,)-,,,J.I.
and October 6, 1972. Frti plcto,teaao optrprom nertoThe author is with the Department of Electrical Engineering, Univer- For this application, the analog computer performs integrationsity of Waterloo, Waterloo, Ont., Canada. and the digital computer generates the components of the vec-
367
IEEE TRANSACTIONS ON COMPUTERS, APRIL 1973
Fig. 1. Hybrid-loop model.
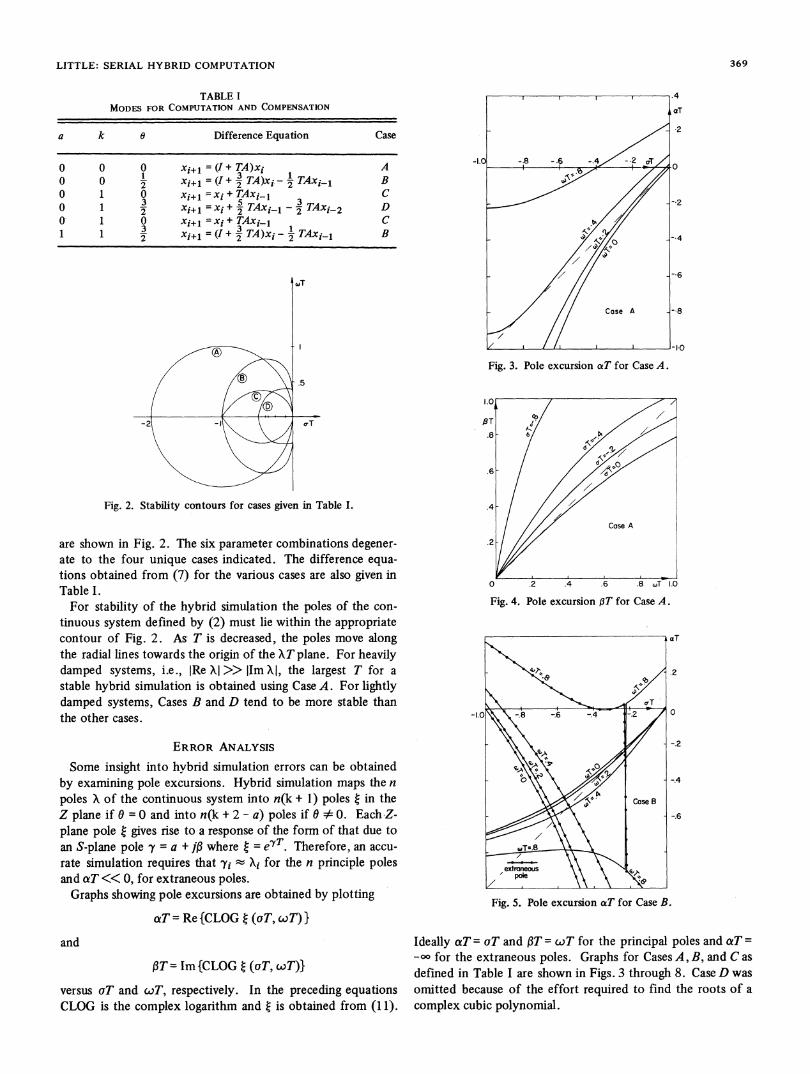
tor function G. Insight into the stability and errors that mayresult from hybrid simulation of the general model (1) will beobtained by studying the linear model
x-Ax+f (2)
where x and f are n column vectors and A is an n X n constantmatrix.A hybrid computer model for (2) is shown in Fig. 1. A uni-
form sampling period T is assumed; C is the analog mode-control signal and 0 is a parameter used for delay compensa-tion. For no delay compensation 0 = 0; for optimum compen-sation using zero-order hold data reconstruction, 0 = k + 0.5where kT is the delay due to digital computation [1].Numerous digital compensation schemes that predict xn
using values of y(t) or y(t) to compensate for delays are alsoavailable [1]. The analog compensation method illustrateduses only the present value of yj to predict and gives rise tolarger stability regions than the other methods. For f(t)constant, however, compensation equivalent to that illustrated,can, if desired, be realized by calculating xn digitally.For the conventional parallel hybrid mode, the control signal
C is set to operate at the beginning of a simulation run and thedigital computer simultaneous samples and outputs, or outputsand samples, at the sampling frequency until the run is com-plete. To eliminate slew and skew errors, sample/hold ampli-fiers at the A/D input and double buffered D/A converters foroutput are used. The ill effects of delay are minimized bychoosing k = 1 and T = Tmin where the minimum period Tminis the sum of the multiplexing and A/D conversion time, themaximum digital computation time/cycle and the D/A updatetime.
Serial hybrid computation is implemented by placing theanalog computer in the hold mode during each sample, digitalcomputation, and D/A update period. By this means, compu-tation delay is eliminated so that the parameter value k = 0 isrealizable. With k = 0, stability and accuracy are improved.In addition, sample/hold amplifiers and double buffer D/Aconverters are not required in the serial mode since the analogcomputer is in the hold mode during the sampling and D/Aupdate period. The method requires, however, that all forcingfunctions be under the same control as the analog computer.
STABILITY CONTOURSVichnevetsky [1] has used stability contours to define re-
gions in the eigenvector plane of the continuous system of (2)for which the hybrid simulation is stable. These stability con-tours will be developed for the sample then output (S-0) and
output then sample (O-S) schemes. With the (S-O) scheme,sampling occurs before outputting so that sampled variablesxi are defined at the end of the analog integration intervals.With (O-S) the xi are defined at the beginning of the integra-tion period. For the case k = 0, the D/A output w1 dependsupon xi so that sampling must occur before outputting.From Fig. 1 with f(t) = 0 it follows that for (S-0)
(3)Xi+1 :- Xi - Twi - 0 l(wi - wi- I )
and
Wi = -AXi-k
For the case of (0S) the following equations apply:
xi+ 1 = xi - Twi - 07wi+ 1 - wi)wi = -Axi-k-
(4)
(5)(6)
If we let a = 0 for the S-0 case and a = 1 for the O-S case,(3) through (6) can be combined to yield the general equation
Xi+ 1 = Xi + TAXi-k + 0 TA(Xi+a-k Xi- 1 +a-k) (7)The Z transform X*(z) = Zt-O xiz- of this equation gives
the following characteristic equation:
{(1 - z)I+ [z-k + 0 (za-k -z1 +ak)]TAk}X*(z)=-ZXo(8)
A transformation X*(z)= VU*(z) exists such that V 1 A V =
A where A is a diagonal matrix of eigenvalues Xi = ai +i 9
i = 1, 2, n of the system matrix A. The eigenvalues or polesXi are assumed unique. Substituting X*(z) in (8) and premul-tiplying by V-1 gives
{(1 - z)I + [1 + 0 (1 _ Z,l)Za]Z-k TA}U*(z)= -zx.
(9)Since the matrix premultiplying U*(z) is diagonal, the poles
t of the hybrid system corresponding to a pole X of the con-tinuous system are given by
(1 - t) + [1 +0(1 -_t-)tal] t-k m = O.
Therefore,
TX= tk(~ 1)
1 + 0 (1 t-i)a
(10)
(1 1)
The hybrid system is stable if Ii < 1. Stability contours areobtained by mapping the unit circle t = eJP into the TX planeaccording to (11).Contours for parameter values a, k, and 0 as given by Table I
368
LITTLE: SERIAL HYBRID COMPUTATION
TABLE IMODES FOR COMPUTATION AND COMPENSATION
a k 0 Difference Equation Case
0 0 0 xi+j = (I + TA)Xi Ao o 2 xi+, =(I+ 3 TA)x-i-TAxi-, BO 1 0 xi+, =xi + TAxi-1 C0 1 3 xi+l=xi+ 2 TAxi-l -TAxi2 Do' 1 0 xi+, =xi+ TAxi-, C
3X+ =I+311 1 2- xi+l =(I+ 23 TA)xi- 2TAxi-l B
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
Fig. 2. Stability contours for cases given in Table I.
are shown in Fig. 2. The six parameter combinations degener-ate to the four unique cases indicated. The difference equa-tions obtained from (7) for the various cases are also given inTable I.For stability of the hybrid simulation the poles of the con-
tinuous system defined by (2) must lie within the appropriatecontour of Fig. 2. As T is decreased, the poles move alongthe radial lines towards the origin of the XT plane. For heavilydamped systems, i.e., IRe XI>> lIm XI, the largest T for astable hybrid simulation is obtained using Case A. For lightlydamped systems, Cases B and D tend to be more stable thanthe other cases.
ERROR ANALYSIS
Some insight into hybrid simulation errors can be obtainedby examining pole excursions. Hybrid simulation maps the npoles X of the continuous system into n(k + 1) poles t in theZ plane if 0 = 0 and into n(k + 2 - a) poles if 0 A 0. Each-Z-plane pole t gives rise to a response of the form of that due toan S-plane pole y = a + j,B where t = e7T. Therefore, an accu-rate simulation requires that yi - Xi for the n principle polesand aT<< 0, for extraneous poles.Graphs showing pole excursions are obtained by plotting
cxT Re{CLOG t (aT, wT)}
and
,BT= Im {CLOG t (aT, cT)}versus aT and cT, respectively. In the preceding equationsCLOG is the complex logarithm and t is obtained from (11).
Fig. 3. Pole excursion otT for Case A.
Fig. 4. Pole excursion PiT for Case A.
aT
.2
0
-.2
-.4
-.6
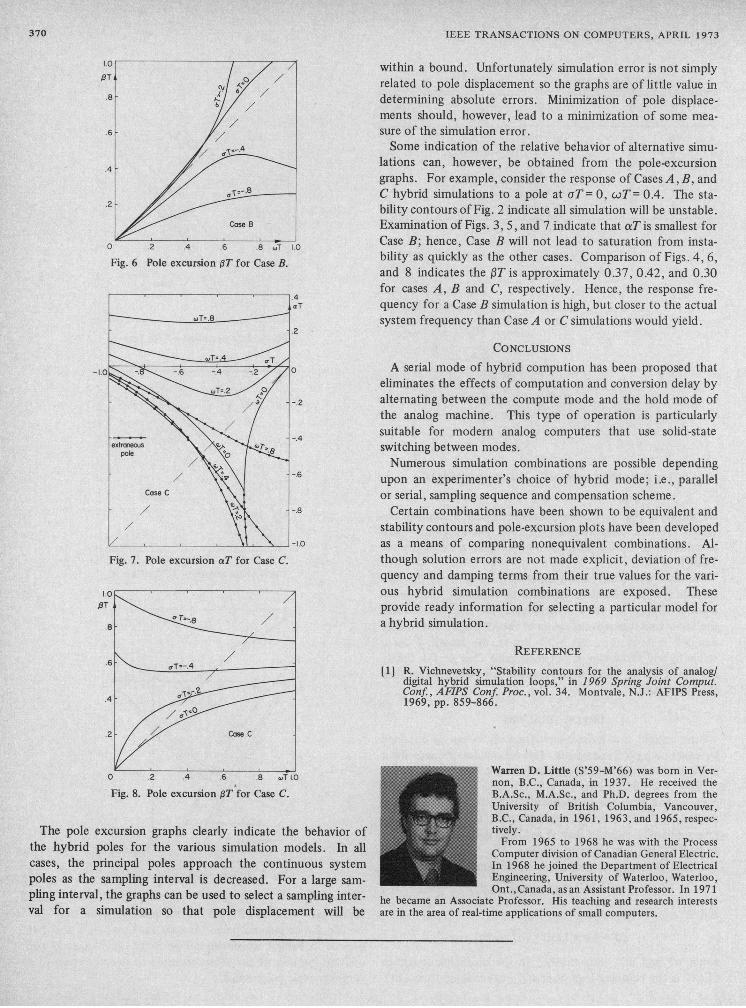
Fig. 5. Pole excursion aT for Case B.
Ideally aT = aT and fT = &.T for the principal poles and aT =
-oo for the extraneous poles. Graphs for Cases A, B, and C asdefined in Table I are shown in Figs. 3 through 8. Case D wasomitted because of the effort required to find the roots of acomplex cubic polynomial.
369
IEEE TRANSACTIONS ON COMPUTERS, APRIL 1973
1.0 within a bound. Unfortunately simulation error is not simply,8TI / related to pole displacement so the graphs are of little value in.8 / determining absolute errors. Minimization of pole displace-
/// ments should, however, lead to a minimization of some mea-.6 / sure of the simulation error.
Some indication of the relative behavior of alternative simu-.4 / /lations can, however, be obtained from the pole-excursion
graphs. For example, consider the response of Cases A, B, andC hybrid simulations to a pole at oT= 0, wT= 0.4. The sta-
.2 >bility contours of Fig. 2 indicate all simulation will be unstable./ /Cose B Examination of Figs. 3, 5, and 7 indicate that aT is smallest for
Case B; hence, Case B will not lead to saturation from insta-
Fig. 6 Pole excursion pT for Case B. bility as quickly as the other cases. Comparison of Figs. 4, 6,and 8 indicates the P3T is approximately 0.37, 0.42, and 0.30for cases A, B and C, respectively. Hence, the response fre-
, , , , aT quency for a Case B simulation is high, but closer to the actualsystem frequency than Case A or C simulations would yield.
.2
CONCLUSIONS
-1.0 -.4 14 --l4 ,/ oA serial mode of hybrid compution has been proposed thateliminates the effects of computation and conversion delay by
// .~ -.2 altemating between the compute mode and the hold mode ofthe analog machine. This type of operation is particularly
>t \<4 suitable for modern analog computers that use solid-stateextr _ e switching between modes.
poleNumerous simulation combinations are possible depending
/ \\-.6 upon an experimenter's choice of hybrid mode; i.e., parallelCcose c \\or serial, sampling sequence and compensation scheme.
~ / %-.8 Certain combinations have been shown to be equivalent and/ \ \ stability contours and pole-excursion plots have been developed
-'.0 as a means of comparing nonequivalent combinations. Al-Fig. 7. Pole excursion aT for Case C. though solution errors are not made explicit, deviation of fre-
quency and damping terms from their true values for the vari-1.0o . ous hybrid simulation combinations are exposed. These
,8T \ provide ready information for selecting a particular model fora hybrid simulation.
REFERENCE(1] R. Vichnevetsky, "Stability contours for the analysis of analog/
digital hybrid simulation loops," in 1969 Spring Joint Comput.Conf., AFIPS Conf. Proc., vol. 34. Montvale, N.J.: AFIPS Press,
.4 1969, pp. 859-866.
Warren D. Little (S'59-M'66) was bom in Ver-o .2 .4 .6T1.0 | non, B.C., Canada, in 1937. He received the
Fig. 8. Pole excursion PT for Case C. B.A.Sc., M.A.Sc., and Ph.D. degrees from theUniversity of British Columbia, Vancouver,B.C., Canada, in 1961, 1963, and 1965, respec-
The pole excursion graphs clearly indicate the behavior of tively.the hybrid poles for the various simulation models. In all | From 1965 to 1968 he was with the Processt Computer division of Canadian General Electric.cases, the principal poles approach the continuous system In 1968 he joined the Department of Electricalpoles as the sampling interval is decreased. For a large sam- Engineering, University of Waterloo, Waterloo,
Ont.,Canada, asan Assistant Professor. In 1971pling interval, the graphs can be used to select a sampling inter- he became an Associate Professor. His teaching and research interestsval for a simulation so that pole displacement will be are in the area of real-time applications of small computers.
370

![Efficient graph computation on hybrid CPU and GPUjingjiez/publications...Efficient graph computation on hybrid CPU and GPU systems 1565 energyefficiency,massiveparallelismandhighmemoryaccessbandwidth[12].Totem](https://img.pdfslide.us/doc/110x75/5f03ca507e708231d40ac8a8/eficient-graph-computation-on-hybrid-cpu-and-gpu-jingjiezpublications-eficient.jpg)