Embed Size (px)
Citation preview

Sensorimotor recalibration reverses the
temporal constraints of somatosensory
attenuation
Total Character with spaces: 84.175
Corresponding to: 35
Christian Houborg
Student number: 20136877
10th semester, Psychology
Aalborg university
31st may 2018
Supervisor: Laura Petrini

Abstract
Theories of sensorimotor control and learning state that our brain uses internal forward
models to obtain efficient online motor control. A forward model uses the copy of a
motor command to form a prediction of the movement’s sensory consequence; if the
prediction matches the sensory feedback, it is experienced attenuated. These
predictions have shown to be temporally precise and short time delays between a
movement and its expected consequence have demonstrated to reduce attenuation.
However, since multisensory feedback is subject to many different and changing
delays, it requires a flexible mechanism to calibrate perception of timing. This thesis
investigates if the brain can learn to predict a new temporal relationship between action
and sensory feedback and whether it reflects updating of an internal forward model.
120 participants across four experiments did a two-alternative forced choice task,
where they triggered a 2 N tap delivered on their left index finger by tapping a sensor
with their right index finger. The triggered tap was delivered immediately or with a
delay in either exposure trials, response trials, or during both. During response trials,
a second tap between 1 to 3 N was applied, and participants had to indicate if the self-
triggered tap or the external tap was stronger. Before the force discrimination task
subjects received either 50, 200, or 500 trials of initial exposure in a quick training
session.
Our results show that after being exposed to a delay subjects’ no longer attenuate
immediate touch. However, only after 200 or more trials of exposure do subjects’ show
attenuation of the sensory feedback of 100 ms delayed touch. Attenuation of delayed
touch seemed to increase with exposure. Importantly the opposite shifts in attenuation
of immediate touch and delayed touch was correlated.
We conclude that these shifts in attenuation reflect recalibration of the predicted
temporal relationship between action and consequence in an internal forward model.
These findings are discussed in the context of sensorimotor learning and cerebellar
processing.

Table of Contents
Introduction .................................................................................................................. 1
Temporal Recalibration ............................................................................................ 2
Sensory Attenuation and the Internal Forward Model ............................................. 4
Methods ...................................................................................................................... 11
Experimental Procedure ......................................................................................... 12
Active Conditions .............................................................................................. 12
Baseline Condition ............................................................................................. 13
Data and Statistical Analysis .................................................................................. 14
Experiment one .......................................................................................................... 16
Experiment one: Results ........................................................................................ 17
Experiment two .......................................................................................................... 19
Experiment two: Results ........................................................................................ 20
Experiment three ........................................................................................................ 24
Experiment three: Results ...................................................................................... 25
Experiment four ......................................................................................................... 29
Experiment four: Results........................................................................................ 30
Discussion .................................................................................................................. 36
Conclusion ................................................................................................................. 41
Acknowledgements .................................................................................................... 42
References .................................................................................................................. 43

Side 1 af 51
Introduction
Being able to quickly distinguish between what is the self and what is external is
critical to human function. Likewise, determining whether what happens in the world
is a result of our own actions or a result of an external cause is equally important.
However, this poses several problems: First, there is such a vast amount of sensory
information available to the brain, that processing all seems like an insurmountable
task. Second, in order to have a unified and meaningful perceptual experience the brain
must successfully integrate sensory information of several modalities. And third,
sensory information of different modalities has different physical properties, are
transduced, transmitted, and processed at different and, more importantly, constantly
altering rates, yet we experience multisensory events at simultaneous.
Determining the temporal order of events in the world and adjusting our actions
accordingly is vital to human survival. Quickly determining if a touch on our body is
caused by our own action or a bug crawling, gives us the ability to quickly identify
and remove the bug. Equally, if you hear a twig snap while walking in the forest
quickly determining if it happened before or after your step quickly informs you
whether the sound was caused by a predator or you and you can act accordingly.
However, we face yet another problem when we have to act: Because of differing and
slow transmission times of afferent sensory signals the motor system cannot rely on
these for efficient online motor control (Wolpert, Miall, & Kawato, 1998, p. 338;
Franklin & Wolpert, 2011, p. 425f). Additionally, there are delays on efferent signals
to muscles and a delay to which they generate force which can also alter with time
(ibid). This means that there are numerous circumstances which can alter the temporal
relationship between motor commands and the resulting sensory consequences (events
such as increasing in mass, muscle fatigue, tool-use, etc.).
This thesis will argue that in order to overcome these problems of temporal ambiguity
and efficient motor control the brain predicts the sensory consequences from the motor
command we execute and adjusts these predictions based on the sensory information
it receives.

Side 2 af 51
Temporal Recalibration
There are many artifacts and illusions that arise as a result of temporal processing and
multisensory integration (Eagleman, 2008). For example, when subjects are shown a
repeated series of the same stimuli they will perceive the time duration of the first
presentation of the stimuli as longer (Rose & Summers, 1995). Similarly, if an oddball
stimulus is displayed, during such a repeated presentation of similar stimuli, the
perceived duration of the oddball stimulus will be significantly longer (Tse,
Intriligator, Rivest, & Cavanagh, 2004). It is theorized that this phenomenon is
correlated with repetition suppression and is a result of predictability between stimulus
(Eagleman, 2008, p. 133). This phenomenon happens equally whether participants are
presented a series of the number 1, or a series counting from 1 and up (i.e. 1-2-3-4-5
etc.) (Pariyadath & Eagleman, 2007; Eagleman 2008, p. 133). A similar suppression
of cortical activity has been observed when the stimulus is a result of self-initiated
motor act (Schafer & Marcus, 1973). This could further suggest a link between
predictive mechanisms related to the outcomes of our actions and perceived timing of
onset and duration of a stimuli.
Haggard and colleagues (2002) found that when we perform an action the perceived
timing of the action and the perceived timing of the resulting sensory consequence is
experienced being closer to each other than they are. The action is experienced
happening slightly later than when actually performed and the result is experienced to
happen earlier (ibid. p. 383). This intriguing phenomenon is termed ‘intentional
binding’ and is theorized to be a compression in perceived time as a result of
multisensory binding of our intentional action and its result. However, Stetson and
colleagues (2006) presented an alternative explanation for this phenomenon. Because
of the many temporal latencies related to multimodal sensory processing, correctly
judging temporal order can be confounded by these changing delays (ibid). When
integrating multisensory information our perception is drawn towards the slowest
travelling signal in order to maintain a coherent experience (Vroomen & Keetels,
2010). Thus, they propose a single mechanism within the central nervous system that
calibrates the temporal expectations between action and sensory consequence in order
to correctly determine cause and effect (Stetson, Cui, Montague, & Eagleman, 2006).
If this is the case then it should predict a novel illusion: When participants are exposed
to a consistent delay between their action and the sensory consequence this mechanism

Side 3 af 51
will recalibrate temporal expectations and shift perception towards the delayed
consequence. When the delay gets removed after exposure and feedback is immediate
subjects will experience this feedback as happening before their action (ibid.).
They tested this using a psychophysical approach where participants had to perform a
forced choice discrimination task. In their primary behavioural experiment participants
triggered a flash on a screen by pressing a button. In 60% of the trials participants
viewed either an immediate (35 ms intrinsic delay) or a 100 ms delayed (135 ms with
intrinsic delay) flash on the screen. In the other 40% of trials the flash appeared
anywhere between 150 ms before or after their press. In every trial participants had to
make a forced choice between what occurred first: Their press of the button or the flash
on the screen (ibid). They found a significant difference in the Point of Subjective
Simultaneity (PSS: The point where participants experience their action and the
consequence happening simultaneously) between the delay and no delay condition.
This shift in perception of simultaneity also occurs during cross-modal asynchronies
(Fujisaki, Shimojo, Kashino, & Nishida, 2004; Vroomen, Keetels, de Gelder, &
Bertelson, 2004). This cross-modal recalibration has been extensively researched and
they all lead to a similar shift pattern across all cross-modal pairings suggesting that a
single supra-modal mechanism is responsible (Hanson et al., 2008; Fujisaki & Nishida,
2009; Kuling et al., 2012; Ley et al., 2009; Machulla et al., 2016; Heron, Hanson &
Whitaker, 2009). Stetson and colleagues (2006) however demonstrate in a control
experiment that the shifts in PSS caused by cross-modal sensory asynchrony are less
than half of motor-sensory shifts. Suggesting we adjust expectations and prediction
through interaction and active engagement with the world (ibid). In a MEG study done
recently, it was found that during lag adaptation visually evoked currents shift earlier
and motor readiness currents shift later in a manner similar to the effects observed in
intentional binding (Cai, Ogawa, Kochiyama, Tanaka, & Imamizu, 2018, p. 659f). The
authors argue that the since the shift in readiness potential happened prior to sensory
feedback it must be a result of prospective and predictive motor processing (ibid).
Further, they argue that this prospective processing predictively modulates the shift in
visually evoked currents (ibid).

Side 4 af 51
Sensory Attenuation and the Internal Forward Model
A possible target mechanism or the module responsible for temporal recalibration is
the internal forward model which is critical for successful online motor control.
Predictive control of our motor actions is an important tool for motor control. Because
multisensory feedback is subjected to noise and delays the motor system has to rely on
predicted outcomes of an action (Wolpert et al, 2011, p. 740). This requires a model
which can effectively simulate our actions and the environment (ibid). The basic idea
of the forward model is that it uses the information of our executed action (The
efference copy of the motor command) to predict the resulting sensory feedback
(corollary discharge) of the action (von Holst, 1954; Sperry, 1950; Blakemore, Frith,
& Wolpert, 1999a). When the prediction and the actual sensory feedback matches, the
experienced feedback is then attenuated (Blakemore et al., 1999a). This mechanism
provides perceptual stability during movement and also lets us quickly distinguish the
self from the environment (Blakemore, Wolpert, & Frith, 2000, p. 11f). This is the
explanation for why we can’t tickle ourselves. The tickling caused by our own
movement is attenuated in the presence of the efference copy, however, when the
sensation is externally generated the forward model lacks the necessary information to
sufficiently predict and attenuate the sensation (Blakemore et al, 1999a). This process
of continually predicting the congruency between the flow of actions and resulting
consequences is essential to providing a sense of agency and confirming the causes of
our actions (Jeannerod, 2006, p. 74). It is theorized that an implicit feeling of agency
associated with our actions is derived from this same comparison process (Synofzik,
Vosgerau & Newen, 2008, p. 222). It also confirms whether we successfully reached
the intended goal of an action (Jeannerod, 2006, p. 20).
An important feature of the internal forward model is its’ ability to simulate a given
movement and the predicted result of the movement without actually executing it (ibid,
p. 21). Many studies have pointed towards that overt (executed actions) and covert
actions (imagined movements which are not executed) are functionally equivalent. For
example, when imagining executing a motor task, like walking a certain distance, it
takes the same time to complete as the actual execution (Decety, Jeannerod, &
Prablanc, 1989). Similarly, motor imagery follows Fitts law; The time duration of a
movement increases with accuracy required (Georgopoulos & Massey, 1987; Decety
& Jeannerod, 1996). The forward model has also been shown to predict sensory

Side 5 af 51
consequences “resulting” from an imagined movement over an actually executed
movement (Kilteni, Andersson, Houborg, & Ehrsson, 2018). This suggests, that a
movement is not necessary for sensory attenuation to occur, the imagined movement
generates an efference copy from which sensory consequences can be predicted (ibid).
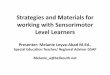
Figure 1. Sensory attenuation.
Figure 1. A computational model of imagined and executed movements.
Sensory attenuation of self-generated sensations is a result of internal
forward models which predicts sensory feedback given a copy of the
motor command (a). When an externally applied touch lines up with the
imagined self-tap of subjects during the experiment the external touch is
attenuated similarly to if the touch was self-generated (b). (Figure taken
from Kilteni, Andersson, Houborg & Ehrsson, 2018, p. 6).
Shergill and colleagues (2003) did a force matching task where participants were
presented a force on their left index finger and then had to reproduce the force by either
pressing with their right finger or controlling a slider. They found that when
reproducing the force by pressing participants consistently underestimate the force
they produced (Shergill, Bays, Frith, & Wolpert, 2003). However, when using the
controller participants accurately reproduced the presented force (ibid). Using the
inverse logic, pressing on top of the sensor during force presentation the externally
generated force is attenuated and participants overestimate when reproducing the force
controlling the motor with a slider (Kilteni et al, 2018). Congruency between the
movement and the resulting consequence is key, when subjects’ movements are
exposed to spatial perturbation the result is no longer attenuated (Blakemore et al.,

Side 6 af 51
1999a, p. 554). Similarly, using a two-alternative forced choice task to measure the
point of equivalency between self-caused touch and external touch, touch was
attenuated less the larger the delay between the movement and the resulting touch
(Bays, Wolpert, & Flanagan, 2005, p. 1127). When delay between the movement and
predicted sensory consequence reaches 300 ms and above it is no longer attenuated
(ibid). Similarly, it was observed in temporal recalibration papers that the shift in
perception decreased with increasing delay (Heron et al., 2009; Stetson et al., 2006).
They argue as the delay between action and consequence becomes larger it is
increasingly difficult to interpret the sensory result as self-caused (ibid.). Exactly at
which point of delay this decrease in shift arises is still ambiguous. This is compatible
with predictions of the internal forward also serving as a basis for associated feelings
of agency over actions and their resulting sensory consequences (Synofzik et al, 2008,
p. 222).
In a follow-up study using a similar approach Bays and colleagues (2006) confirming
that the attenuation observed was caused by a predictive and not a postdictive process.
Making subjects trigger a tap on their left index finger by pressing a sensor with their
right index finger, they infrequently remove the sensor in random trials (Bays,
Flanagan, & Wolpert, 2006). Regardless if the right index finger made contact with
the sensor, the resulting tap on their left finger was attenuated (ibid). This reflects a
predictive mechanism which attenuates self-generated sensory events on the grounds
of planned motor activity (ibid).
There are many circumstances which change the relationship between our movements
and the associated sensory consequences. Gradual and slow changes to our body
through aging and development (bones growing, changes in muscle mass) coupled
with more short-term factors like muscle fatigue alters the properties of the
neuromuscular system (Franklin & Wolpert, 2011, p. 435). Additionally, we
constantly learn new movements and discover new relationships between our action
and the related sensory results when we engage in different tasks. Under these
constantly changing conditions it is necessary to continually update internal models to
keep them tuned to body status as well as the context of the external environment in
order to accurately predict sensory feedback (ibid; Wolpert & Kawato, 1998). In order
to have a wide repertoire of different motor behaviours with many different objects in
a variety of differing contexts and environment it is theorized that sensorimotor control

Side 7 af 51
is a modular system (Wolpert & Kawato, 1998). The system is composed of several
pairs of inverse and forward models. The inverse model acts as a controller providing
the motor command required by the forward model to predict a future state (ibid, p.
1318). The benefit of a modular system comprising several pairs of inverse/forward
model is that it explains how we can transfer from one learning context to another
while retaining previously learned behaviours and without the newly learned motor
behaviour interfering (ibid). It also gives an added explanation of how learning in one
context can transfer to motor behaviour in another by combining the output of several
model pairs (ibid, p. 1319).
Because there is, as previously established, a wide range of uncertainty and noise in
sensory feedback, the prediction of the forward model is based on Bayesian inference
(Körding & Wolpert, 2004; Körding & Wolpert, 2006; Wolpert et al, 2011, p. 740). In
order to provide an accurate estimate of action outcomes a forward model predicts the
outcome most likely to happen. This estimation is based on our prior statistical
knowledge of the world combined with incoming sensory feedback to determine the
probability of the next action outcome (ibid.). Combined with inverse models, which
provide the efference copy, forward models use Bayesian inference to continually
make and adjust estimations about our motor actions and their results in the world
(ibid).
A good example of how internal forward models calibrate is tool-use. Effective use of
tools is vital to success of the human species, they allow us to fulfil tasks otherwise
impossible or much more efficiently than without tool use. When we use tools, several
studies suggest they become an extension of our peripersonal body-space when we use
them (Berti & Frassinetti, 2000; Farné & làdavas, 2000).
Kilteni and Ehrsson (2017a) showcase that sensory attenuation occurs when
participants do the force-matching task by reproducing the presented force with a tool.
Participants underestimated their produced force pressing with a tool similar to when
they press with their finger (ibid.). Suggesting that the sensory predictions of a forward
model also extend their predictions of sensory consequences caused by our actions
with a hand-held tool (ibid., p. 6f). Interestingly, keeping in mind that tools extend our
bodies, Kilteni & Ehrsson (2017b) found that the sensory predictions made by a
forward model depend on the sense of ownership of the body. Using the Rubber Hand

Side 8 af 51
Illusion (Botvinick & Cohen, 1998) to manipulate subjects’ sense of body ownership,
participants embodied a 3D printed hand equipped with a servomotor to make
movements congruent with the subject’s movements (Kilteni & Ehrsson, 2017b). They
then performed the regular force-matching task (Shergill et al, 2003) in four different
conditions across two experiments. The study found that participants attenuated touch
during ownership of the fake rubber hand (Kilteni & Ehrsson, 2017b). Critically they
also found, during ownership of the fake rubber hand, that ownership was negatively
correlated with attenuation when the rubber hand was placed at a distance from the
sensor, but the two real hands were aligned (Kilteni & Ehrsson, 2017b). Further, when
the rubber hand was placed at a distance, but subjects’ hands were aligned (A situation
that normally produces sensory attenuation), it led to a significant decrease in
attenuation (ibid.). This provides an example of how forward models continually
estimate the state of our body and the world.
There are several ways of learning through which we adjust motor behaviour and
predictions (Wolpert et al., 2011). Even just by using the motor system and making
repetitive reaching movements in one random direction biases the system towards that
direction in the future, this is termed use-dependent learning (ibid., p. 744).
Another way for the system to learn is through reinforcement learning: By making
predictions about the future state when executing a movement, forward models
correctly tell us if we reached the desired state. If the desired state is connected with a
reward signal it can reinforce the motor-behaviour that led to this state (ibid, p. 743).
This way of learning, however, is slow as the reward signal inherently provides little
information (Success or failure).
A third process of learning is through error correction, so called error-based learning.
This has been shown in many adaptation paradigms, where participants adjust their
motor behaviour to different perturbations (ibid). When the forward model makes
sensory predictions the comparison process between predicted and actual outcome
returns the discrepancy between the two. This error signal can inform the motor system
of necessary adjustments to reduce error, however, this can only be determined with
some amount of noise, one error can lead to several different adjustments (ibid). In a
hand-reaching experiment with visual and spatial perturbations Wei and Kording
(2010) discovered that noise in feedback decreases the rate of adaptation while

Side 9 af 51
uncertainty of estimated state increases the rate of adaptation. Similar differences in
rates of motor-learning has been found to be affected by a fast learning process which
quickly adapts but also quickly “forgets” and a slow learning process which retains
information over a wider time scale (Smith, Ghazizadeh, & Shadmehr, 2006). These
fast and slow processes have been linked to explicit and implicit learning proesses in
a visuomotor adaptation task by striking similarities in their adaptation rates
(McDougle, Bond, & Taylor, 2015). Explicit learning, defined as the target-error,
happens when participants are instructed how to counter a given perturbation and their
adaptation is thus faster (Taylor, Krakauer, & Ivry, 2014). Implicit learning is driven
by the previously described sensory prediction error signal provided by the
discrepancy between predicted and actual sensory feedback. This learning is slow and
monotonic and occurs on a trial-to-trial basis by correcting prediction error from each
trial (ibid; Wolpert et al., 2011; Wolpert & Flanagan, 2001, p. 729; Krakauer &
Mazzoni, 2011, p. 637).
Sensory attenuation and adaptation has also been studied using MEG/EEG approaches.
Using paradigms that measure the activity in auditory cortex while participants trigger
a sound by pressing a button. Schafer and Marcus (1973) found a significant difference
between the amplitudes of a self-generated stimuli vs an externally generated sound in
several components. This mirrors the classic sensory attenuation effect; The salience
of an external stimuli is much greater than that of the self-produced stimuli. A later
study tested the hypothesis that this observation of differences in amplitude is caused
by prediction error (SanMiguel, Saupe, & Schröger, 2013). Participants through three
conditions, two different sound conditions and a no sound condition (ibid, p. 2). In the
sound conditions participants either triggered the same sound or a random sound which
in both conditions would be randomly omitted. The logic being that the motor system
can consistently predict the single repeated sound but not the randomly different
sounds (ibid.). They found that during the single-sound condition there was still
activity in auditory cortex during sound omission trials, which reflects the neural code
of the sensory prediction (ibid, p. 6). Importantly, no such difference was observed
when sound was omitted in the random sound condition, as no stable representation
and prediction could be formed of the self-triggered stimuli (ibid). This approach has
also been used to study whether motor-imagery represents actions in the same way as
executed actions by demonstrating sensory attenuation of sensory consequences

Side 10 af 51
during imagined action (Whitford, Jack, Pearson, Griffiths, Luque, Harris, Spencer, &
Le Pelley, 2017; Tian, Ding, Teng, Bai, & Poeppel, 2018). However, by using speech
they do not have a control measure to ensure no speech muscles were subtly activated
during covert conditions.
While learning and updating internal forward models have been rigorously tested with
different spatial and visuomotor adaptation paradigms there has been little use of lag
adaptation in behavioural studies on sensorimotor learning and sensory attenuation.
However, MEG and EEG experiments have been used to investigate the effects of
temporal perturbation on the attenuation of the resulting Sensory Evoked Potentials
(SEPs). In these studies participants trigger a sound by the press of a button, they are
then trained for a variable amount of trials with either no delay between the press and
the sound or a 100 ms delay between their press and the sound (Aliu, Houde, &
Nagarajan, 2009; Elijah, Le Pelley, & Whitford, 2016; Cao, Veniero, Thut, & Gross,
2017). They then measure and compare the M100/N1 component between conditions
with or without a delay. In their initial findings there was significant differences
between the amplitude of the N1 component in conditions with immediate and delayed
feedback (Aliu et al., 2009; Elijah et al., 2016). However, when trained with a delay
this significant difference in amplitude disappeared between the conditions, suggesting
motor-induced suppression of delayed feedback equal to immediate feedback (ibid.).
These studies of physiological attenuation suggest a similar process of gradual learning
through error correction in sensory predictions. However, studies measuring
physiological attenuation in the amplitude of evoked potentials remain relatively
isolated from studies using behavioural measures of sensory attenuation (Palmer,
Davare & Kilner, 2016). While it is tempting to conclude that they both reflect the
same predictive neural processes, it is suggested that they have different underlying
neurophysiological correlates, and that the relationship between physiological and
perceptual sensory attenuation is not straightforward (Ibid).
In the present study we aim to investigate this role of temporal recalibration in the
sensory predictions made by an internal forward model. Using a design that ensures
recalibration with an initial exposure block followed by re-exposure after each
response (Cai, Stetson, & Eagleman, 2012). However, we use the Point of Subjective
Equality (PSE) as a measure similar to Bays and colleagues (2005) instead of the Point
of Subjective Simultaneity (PSS). We hypothesize that shifts in attenuation reflects

Side 11 af 51
“recalibration” of the sensory predictions by an internal forward model. Particularly
we theorize that the usual patterns of attenuation reverse after delay exposure, i.e.
delayed touch is attenuated after exposure to a delay and immediate touch is not
attenuated after exposure.
Methods
A total of 120 subjects, 30 participants per experiment, participated across four
different experiments. Sample size was based on previous studies using exposure to
systematic delays between action and sensory consequence (Cai et al, 2012; Stetson et
al, 2006). Participants were recruited from the general Stockholm area, using flyers,
advertisements on a Swedish website for research (www.studentkaninen.se), and via
advertisements on various Facebook groups.
In all of the experiments, subjects rested their left hand with the palm of the hand
facing upwards and their left index finger placed in a molded support. A cylindrical
probe made of aluminum with a flat surface (20 mm diameter) rested on the pulp of
the subjects left index finger. The probe was attached to, and controlled by, a torque
motor (Maxon EC Motor EC 90 Flat manufactured in Switzerland). A small
commercially available force sensor (FSG15N1A, Honeywell Inc.; diameter 5mm;
minimum resolution, 0.01 N; response time, 1 ms; measurement range, 0-15 N) was
placed inside the probe in order to measure the force generated by the motor. A laptop
computer using Linux Ubuntu controlled the motor. Commands were sent from the
laptop to an Arduino board that send commands to a second controller connected to
the motor. The system has an intrinsic delay of approximately 35 milliseconds
including the rising time of the applied force.
A force sensor was placed inside a similar cylindrical probe, mounted on top of a small
wooden support, was put over their left index finger. Participant sat with their right-
hand hovering above this sensor awaiting an auditory cue to press the sensor with their
right index finger. To ensure the comfort of subjects we had several pads of foam
available that participants could place freely, before the start of the experiment, for
both their hands and forearms to rest on.

Side 12 af 51
The participants’ hands, forearms, and the torque motor were placed behind a screen
to prevent view during all conditions. Participants were also requested to visually
fixate on a cross, which was located at a 2 meters distance on the wall opposite to them
in their eye height. On the left and right side of the cross, a left-pointing arrow
accompanied by “first force stronger” and a right-pointing arrow accompanied by
“second force stronger” was placed to serve as a reminder for participants when using
the foot-pedal during the psychophysical task described below.
Further, subjects wore headphones playing white noise during the experiment to
prevent unwanted sounds, created either by the experimenter clicking a mouse button
to initiate trials, from the motor during presented taps, or by participants’ right-hand
tap, being used as cues for the task. The noise level was adjusted to the individual
participant’s hearing before the start of the experiment. The Regional Ethical Review
Board of Stockholm approved all experiments (Approval #:2016/445-31/2).
Experimental Procedure
The experiment consisted of five conditions: Four active movement conditions and a
passive condition (no movement) as a baseline.
Active Conditions
The active conditions consisted of the experiment consisted of exposure trials and
response trials. During exposure trials, participants were instructed to, upon hearing
an auditory cue (a sine wave of 1000 Hz lasting 100 ms), tap the sensor placed over
their left index finger as soon as possible with their right index finger (active tap).
When participants tapped the sensor, they would trigger the motor and receive a single
2 N tap lasting 100 ms on their left index finger (test tap). This test tap could appear
either immediately (without any additional delay other than the intrinsic delay of the
system) after the active tap, to simulate self-touch, or with an added 100 ms delay
(exposure delay).
During response trials participants reacted to the same auditory cue, as heard during
exposure trials, upon which they would trigger the test tap with their active tap on the
Sensor. The test tap would again appear either immediately or after a small 100 ms

Side 13 af 51
delay (test delay). A second externally triggered force (comparison tap) followed the
test tap of the motor initiated by the participant’s active tap after a random delay
between 800 ms and 1500 ms after. The intensity of the comparison tap varied between
1-3 N (1, 1.5, 1.75, 2, 2.25, 2.5, or 3). Participants were prompted, after a response-
trial, to perform a forced choice between the two taps. They had a 2 second window,
cued by a tone (a sine wave of 1500 Hz lasting 2000 ms), to indicate which tap felt
stronger to them: the test tap (first tap) or the comparison tap (second tap). Participants
were instructed to move a foot pedal left or right (first force stronger or second force
stronger) during the tone to indicate their choice. Participants had the option to change
their indicated answer shortly after the tone and before the next trial.
Each condition consisted of 70 response trials corresponding to 10 repetitions for each
of the seven varying forces. The order of forces was randomized for each participant.
Each response trial was preceded by five exposure trials to re-expose participants after
a response trial. Subjects went through a small block only consisting of exposure trials
in the beginning of each condition.
The four active conditions corresponded to the four combinations of exposure delay
and test delays. So, a condition of no delay in neither exposure nor delay [0 ms, 0 ms];
a condition with exposure delay but no test delay [100 ms, 0 ms]; a condition with no
exposure delay but an added test delay [0 ms, 100 ms]; and a condition with both
exposure delay and test delay [100 ms, 100 ms]. Subjects went through a small block
only consisting of exposure trials in the beginning of each condition. Participants were
briefly taught how to press the sensor with their right index finger in a short training
session before the beginning of the experiment. This was done to avoid participants
adopting different tapping strategies and to ensure that they did not press to hard or
too soft.
Baseline Condition
During the passive condition participants sat passively with their right index finger
resting on the button as they received two successive taps on their left index finger.
The initial test tap was presented 500 ms after the same auditory cue as heard during
active conditions and the variable comparison tap would be presented randomly
between 800-1500 ms after the test tap. Participants then went through the same
response procedure as in the active conditions. As it assessed sensory attenuation

Side 14 af 51
without movement this condition had only response trials. The baseline condition
consisted of 105 response trials with 15 repetitions of the seven different intensities (1
N, 1.5 N, 1.75 N, 2 N, 2.25 N, 2.5 N, or 3 N). Other groups have previously used this
psychophysical paradigm to measure the degree of sensory attenuation (Bays et al,
2005).
Participants never received any feedback concerning their performance in the two-
alternative forced-choice task. The order of conditions and the order of presented
forces was randomized for each participant to avoid order effects.
Data and Statistical Analysis
The collected responses from each participant in each condition was fitted with a
logistic regression model where α represents the intercept and β the slope (Eq. 1):
f(x) = 1/1 + exp(-(α + βx)) (1)
The fitting was done using a glm function with a logit link function in R 3.4.0. We
extracted the point of subjective equality (PSE) from the fitted curve of each
participant for each condition (Fig. 1.). The PSE corresponds to the point where the
participant perceives the test tap (Fixed at 2 N) to be equal to the comparison tap (p =
0.5). Further, we extracted the Just Noticeable Difference (JND). The JND is the
intensity of the comparison tap where the probability of a participant perceiving the
comparison tap as stronger is equal to 0.75.

Side 15 af 51
Figure 2. A subject’s data fitted with a logistic model
Figure 2. The data of a representative participant fitted with a logistic
regression model as shown in equation 1. The dashed line intersects the
point where the model puts 0.5 probability (50%) that the participant
choses the second of the two forces as stronger. From this point, we infer
that both forces are perceived as equal and we extract it as the point of
subjective equality (PSE).
Normality of PSE distributions was tested using Shapiro-Wilk tests and the variance
equality with F-tests. Planned comparisons were then performed with either paired t-
tests or Wilcoxon signed-rank tests depending on the result of above tests. As
hypothesized we were mainly interested in seeing the shifts in perception of immediate
touch and delayed touch when exposed to either immediate or delayed touch. Thus,
the main comparisons drawn are between a test delay and the two different conditions
of exposure delay (100 ms exposure delay, 0 ms exposure delay) as well as the baseline
that assesses the participants’ passive perception of the forces. All statistical tests done
were two-tailed.

Side 16 af 51
Experiment one
Thirty naïve participants (17 females and 13 males) between the ages of 20-32 (mean
age = 24.6, SD = 4.2) participated after providing written informed consent.
Participants handedness (27 right-handed and 3 ambidextrous) were assessed with the
Edinburgh Handedness Inventory (Oldfield, 1971). None of the participants knew the
hypotheses of the experiment and they were unable guess the purpose of the
experiment either before or after the completion of the experiment. One participant
was excluded from the statistical analysis because of a problematic fit of baseline
condition, making N = 29.
Following Cai and colleagues experimental design (2012, p. 6), to make participants
adapt to a delay, we had a brief pre-adaptation block of 50 exposure trials which was
then followed by 5 trials of re-exposure before each test trial. For this experiment, we
injected a 200 ms delay between participants’ active tap and the test tap they received
during delay conditions.
Following temporal recalibration research there is some uncertainty as to which delays
yields the largest lag adaptation. Stetson and colleagues (2006) found the largest shifts
of participants’ point of subjective simultaneity using a 100 ms delay. However, Heron
and colleagues (2009) found considerably larger shifts in tactile modality using a 200
ms delay between action and sensory consequence. We used a 200 ms delay between
active tap and the test tap for this experiment
Participants went through five conditions: A no delay condition [0 ms, 0 ms], an
exposure delay condition [200 ms, 0 ms], a test delay condition [0 ms, 200 ms], a
constant delay condition [200 ms, 200 ms], and a passive condition. Each condition
lasted approximately 10-12 minutes making the total time for the experiment around
an hour. Participants had the option to take a small break between each condition. The
order of conditions and forces were randomized.
We collected the 70 data points for each active condition and 105 data points for the
baseline condition. We then fitted the data points with a logistic model to gather the
point of subjective equality (PSE) between the test tap and the comparison tap. We
then compared the mean PSE for each condition by using paired t-tests (see methods).

Side 17 af 51
Here we are using attenuation as a measure of recalibration rather than the point of
subjective simultaneity as used by previous temporal recalibration studies. Thus, we
expect to replicate the already known results from other studies using sensory
attenuation as a measure (Blakemore et al, 1999; Bays et al, 2005). The internal
forward model of subjects predicts the immediate tap caused by self-action resulting
in attenuated somatosensory perception of the test tap. It has also previously been
shown when the temporal prediction made by the forward model is violated by a small
delay (100 ms, 200 ms) less attenuation is observed in subjects.
We hypothesize that the observed mean PSE of the no delay condition [0 ms, 0 ms]
will be significantly lower compared to the mean PSE observed in the passive
condition and the test delay condition [0 ms, 200 ms]. As sensory evidence is gathered
in the exposure delay conditions [200 ms, 0 ms; 200 ms, 200 ms] we expect that the
mean PSE will shift in the opposite direction compared to their no delay counterparts
[0 ms, 0 ms; 0 ms, 200 ms] i.e. there will be less or no attenuation of immediate touch
and attenuation of the delayed test tap during delay exposure.
Experiment one: Results
When exposed to the immediate test tap (0 ms exposure delay) we observed significant
attenuation only in the immediate test tap [0 ms, 0 ms] (M = 1.82, SD = 0.16) when
compared to the baseline (mean PSE = 1.96, SD = 0.095), when using a paired t-test,
t(28) = 4.52, mean difference = 0.13, 95% confidence interval [CI] = [0.19, 0.07], p <
0.001. We did not observe significant differences between the delayed test tap (mean
PSE = 1.92, SD = 0.13) and the baseline (paired t-test between test delay condition [0
ms, 200] and baseline), t(28) = 1.5, mean difference = 0.04, 95% confidence interval
[CI] = [-0.014, 0.09], p = 0.14. As previously shown by other studies investigating
sensory attenuation subjects felt the immediate test tap [0 ms, 0 ms] significantly less
intense compared to the delayed test tap [0 ms, 200 ms] during immediate exposure
with a paired t-test, t(28) = 3.04, mean difference = 0.09, 95% confidence interval [CI]
= [0.16, 0.03], p = 0.005.

Side 18 af 51
Figure 3. Results
Figure 2. Results for the first experiment. Shown here is the mean PSE
for each condition with bars displaying ± standard error. Important
comparisons are displayed (*p < 0.05, **p < 0.01, ns = not significant).
When exposed to an injected delay between the active tap and the test tap participants
felt the immediate test tap (mean PSE = 1.89, SD = 0.17) significantly more intense
compared to the no delay condition (paired t-test between [0 ms, 0 ms] and [200 ms, 0
ms]), t(28) = 2.16, mean difference = 0.06, 95% confidence interval [CI] = [0.123,
0.003], p = 0.04. The exposure delay condition [200 ms, 0 ms] was however
significantly different from baseline somatosensory perception when compared with a
paired t-test, t(28) = 2.22, mean difference = 0.07, 95% confidence interval [CI] =
[0.130, 0.005], p = 0.034. While they felt the immediate test tap less intense after delay
exposure, it was still attenuated. This suggests that the predictions of the forward
model shifted towards a delay reflected in this rise in PSE. Nevertheless, subjects did
not completely forget to predict the immediate tap. We expected that with a consistent
exposure to a delay, participants would feel the delayed test tap (mean PSE = 1.93, SD
= 0.14) attenuated compared to the delayed test tap during exposure to the immediate
test tap. However, when we compared [200 ms, 200 ms] and [0 ms, 200 ms] with a
paired t-test this was not the case, t(28) = 0.51, mean difference = 0.01, 95%

Side 19 af 51
confidence interval [CI] = [-0.04, 0.06], p = 0. 61. The delayed test tap [200 ms, 200
ms] was not attenuated compared to baseline, t(28) = 0.91, mean difference = 0.026,
95% confidence interval [CI] = [0.08, -0.03], p = 0.37.
We successfully managed to replicate previous known results, confirming that this
design accurately measures sensory attenuation. In this experiment, we demonstrate
that when exposed to a delay of 200 ms, between a movement and its sensory
consequence, the immediate test tap becomes more salient, yet still attenuated, than
when subjects received no exposure delay. Presumably, because the prediction of the
forward model is adjusted in favor of a delay. However, we do not see any conclusive
evidence of this as the delayed tap is not attenuated. The comparator has also been
associated with the feeling of agency (Synofzik et al, 2008). The consistent mismatch
between predicted and actual sensory feedback during test delay observed in this
experiment indicates no recalibration and no feeling of agency over the test tap.
Previous studies show that there is a diminished effect of recalibration with
increasingly large delays (Stetson, 2006, p. 654; Heron et al. 2009, p. 3). With larger
delays it is also more likely that a subject considers the resulting sensory consequence
as something not directly caused by their action (ibid.).
While the relationship between sense of agency and sensory attenuation is rather
complex, there is some evidence to suggest that the sense of agency or the belief that
a sensory consequence is self-caused is a pre-requisite for sensory attenuation to occur
(Desantis et al, 2012; Gentsch & Schütz-Bosbach, 2011). Although it is debatable, at
what point this change in causality judgement of a sensory consequence occurs, our
findings could suggest that a 200 ms delay is beyond this point. To investigate further
we repeated the same experiment using a 100 ms delay over a 200 ms delay.
Experiment two
Thirty naïve participants (17 females and 13 males) between the ages of 20-32 (mean
age = 25.3, SD = 3.6) participated after providing written informed consent.
Participants handedness (27 right-handed and 3 ambidextrous) were assessed with the
Edinburgh Handedness Inventory (Oldfield, 1971). None of the participants knew the
hypotheses of the experiment and they were unable to guess the purpose of the
experiment either before or after the completion of the experiment.

Side 20 af 51
Using the exact same design as previous experiment. Participants did five separate
conditions, four of them active and one of them passive, where we collected their point
of subjective equality (PSE) for each condition by fitting the data points (70 in the
active conditions, 105 in the passive baseline) with a logistic regression. The four
active conditions were split into all possible combinations of exposure delay and test
delay: No delay [0 ms, 0 ms]; test delay only [0 ms, 100 ms]; exposure delay only [100
ms, 0 ms]; and constant delay [100 ms, 100 ms]. The no movement condition acted as
a baseline for subjects’ somatosensory perception. The order of conditions and forces
was randomized for each participant. Each condition lasted approximately 10-12
minutes and participants had a small break between each condition to stretch their
fingers and to prevent tiredness. The entire session lasted approximately 60 minutes.
We reduced the delay used from 200 ms to 100 ms reasoning that a 200 ms delay is a
too large delay for subjects to associate the triggered test tap as a direct consequence
of their active tap. At the beginning of each condition, subjects still had 50 trials of
exposure followed by five trials of re-exposure before each response trial.
Testing the same hypotheses as previous experiment, we expect again to replicate
previously shown results. We hypothesize that exposure to a consistent delay will shift
the usual patterns of attenuation in the opposite direction, i.e. participants will not
attenuate the immediate tap and attenuate the delayed tap because subjects recalibrated
their internal forward model. We expect a significant decrease in the mean PSE of the
no delay [0 ms, 0 ms] and constant delay [100 ms, 100 ms] condition compared to the
mean PSE observed in the baseline condition. Further, we predict a significant increase
in mean PSE of the immediate touch during delay exposure [100 ms, 0 ms] when
compared to the no delay condition [0 ms, 0 ms].
Experiment two: Results
During exposure to immediate touch (0 ms exposure delay) we observed only
attenuation of the immediate test tap [0 ms, 0 ms] (M = 1.86, SD = 0.16) when
compared to the baseline (M = 1.99, SD = 0.13) using a paired t-test, t(29) = 3.295,
95% confidence interval [CI] = [0.204, 0.048], M = 0.13, p = 0.003. As expected, we
successfully replicated previous findings of other studies; the immediate tap felt

Side 21 af 51
significantly less intense as a result of forward model prediction based on the
movement. We observed no significant differences between the delayed test tap [0 ms,
100 ms] (M = 1.95, SD = 0.15) when compared to the baseline condition using a paired
t-test, t(29) = 0.897, 95% confidence interval [CI] = [-0.043, 0.109], M = 0.03, p =
0.38. While previous studies did find significant differences during conditions with an
injected delay and a passive condition, the additional sensory evidence in favour of
immediate touch yielded by the five re-exposure trials could explain this finding. As
expected from previous studies, the immediate test tap [0 ms, 0 ms] felt significantly
less intense compared to the delayed test tap [0 ms, 100 ms], t(29) = 3.82, 95%
confidence interval [CI] = [0.143, 0.0431], M = 0.09, p < 0.001.
Figure 4. Experiment two results
Figure 4. The mean PSE gathered for each condition for the second
experiment with bars displaying ± standard error. Only the important
comparisons are displayed (**p < 0.01, ***p < 0.001, ns = not
significant.

Side 22 af 51
Again, when participants were exposed to a consistent 100 ms delay during exposure
trials this pattern of attenuation reversed. Subjects felt the immediate test tap during
delay exposure [100 ms, 0 ms] (mean PSE = 1.93, SD = 0.13) significantly stronger
compared to the no delay condition [0 ms, 0 ms] t(29) = 2.86, mean difference = 0.07,
95% confidence interval [CI] = [0.12, 0.02], p < 0.01. Additionally, the immediate test
tap was no longer attenuated even when compared to baseline using a paired t-test,
t(29) = 0.15, mean difference = 0.05, 95% confidence interval [CI] = [-0.02, 0.13], p
= 0.15. We did not observe the same reversal pattern when comparing mean PSE of
the delayed test tap during exposure (mean PSE = 1.93, SD = 0.15) [100 ms, 100 ms]
and no exposure [100 ms and 100 ms], t(29) = 1.22, mean difference = 0.025, 95%
confidence interval [CI] = [-0.017, 0.07], p = 0.23. However, there was a trend towards
attenuation of the delayed test tap during delay exposure [100 ms, 100 ms] when
compared to the baseline, t(29) = 1.70, mean difference = 0.06, 95% confidence
interval [CI] = [-0.01, 0.13], p = 0.09972.
Figure 5. Shift in attenuation of the immediate tap
Figure 5. The logistic regression fitted using the group data for the no
delay condition and the exposure delay condition. Mean PSE and Mean
JND for each condition was used to make the fit. Participants “unlearn”
the prediction of the immediate test tap when they are exposed to a 100
ms delay between their active tap and the test tap they receive.

Side 23 af 51
In experiment two, we successfully managed to replicate previous shown results in the
literature and the results from experiment one, suggesting that the internal forward
model is recalibrating its temporal predictions during delay exposure. Because the
expected shift in attenuation of the delayed test tap was not observed, there are still
alternative conclusions, which can be drawn from this set of data. One possible
explanation is that the mismatch between prediction and the sensory consequence is
caused by general uncertainty added by the delay and not necessarily an update of the
internal forward model. However, upon further inspection, by comparing the Just-
Noticeable Difference (JND), which is the point of 0.75 probability that participants
judge the comparison tap as stronger, it appears that there were no significant
differences in certainty between the two conditions. A paired t-test was done between
the mean JND of the no delay condition [0 ms, 0 ms] (mean JND = 0.183, SD = 0.8)
and the exposure delay condition [100 ms, 0 ms] (mean JND = 0.178, SD = 0.07), t(29)
= 0.30, mean difference = 0.005, 95% confidence interval [CI] = [-0.03, 0.04], p =
0.77. Discriminability remained the same thus making uncertainty an unlikely
explanation for the difference between the two conditions. Further, we see a trend in
attenuation of the delayed test tap compared to the baseline, which leans towards our
hypothesis. However, it is not enough evidence to conclude that the internal forward
model has recalibrated its predictions of timing between action and consequence.
As noise and uncertainty is always a factor in sensorimotor control the system relies
upon Bayesian inference to accurately represent probabilities of outcomes in order to
successfully predict the most likely outcome of an action (Kording & Wolpert, 2006,
p. 319). The prior experiences of timing between action and consequence, which
should be experienced as immediate, is continually weighted against incoming sensory
feedback in order to make an inference about the probable result of an upcoming
movement. The error between the predicted outcome and the actual outcome returns
an error, which can be used to update future predictions (Wolpert et al, 2011, p. 742).
While such error-based learning usually can lead to rapid trial by trial learning, it can
also be more gradual (ibid; Taylor, Krakauer & Ivry, 2014, p. 3023; Wolpert &
Flanagan, 2016, p. 8).
In a visuomotor adaptation task done by Taylor and Ivry (2011), participants were
instructed to make rapid reaching movements towards a visually displayed target by
sliding their hands along the surface of a table. After a set amount of trials to

Side 24 af 51
familiarize subjects with the task participants were taught a specific aiming strategy.
After some practice, a 45-degree visuomotor perturbation was introduced. Participants
then had 320 trials to correct the resulting endpoint error and successfully reach the
designated target. When participants relied purely on the visual landmark and their
own error correction, it took approximately 100 trials before successfully adapting to
the spatial perturbation (ibid; Taylor et al, 2014, p. 3023). Thus, the kind of implicit
error-based learning where, a perhaps unconscious, adjustment of the predictions of a
forward model can be rather slow and gradual. Similarly, MEG/EEG studies that found
a cortical suppression of the M100/N1 component in auditory cortex in trials with a
100 ms delayed tone triggered by participants’ button press only observed attenuation
within 300 trials (Cao et al., 2017; Aliu et al., 2009; Elijah et al., 2016).
One possibility that we only begin to see a trend in attenuation of the delayed tap
during delay exposure, is that there has not been enough sensory evidence for the
subjects to adjust the temporal prediction of their internal forward model. To test if
further sensory evidence is required before subjects updated their forward model, we
conducted the same experiment again. This time we adjusted the amount of exposure
participants received.
Experiment three
Thirty new naïve participants (13 females and 17 males) between the ages of 19-35
(mean age = 24.3, SD = 4.5) participated after providing written informed consent.
Participants handedness (27 right-handed and 3 ambidextrous) were assessed with the
Edinburgh Handedness Inventory (Oldfield, 1971). None of the participants knew the
hypotheses of the experiment and they were unable to guess the purpose of the
experiment either before or after the completion of the experiment.
Retaining the same design as in previous experiments. We collected a subjects’ point
of subjective equality (PSE) in five different conditions by fitting the data points with
a logistic regression (70 trials in active conditions, 105 trials in the baseline condition).
The conditions where the same as in the previous experiment also using a 100 ms delay
between participants’ active tap and the test tap. We had a no delay condition [0 ms, 0
ms], a test delay condition [0 ms, 100 ms], an exposure delay condition [100 ms, 0

Side 25 af 51
ms], a constant delay condition [100 ms, 100 ms], and finally a passive condition
serving as a baseline for participants’ somatosensory perception.
For this experiment, participants were exposed to 200 trials of either no delay or delay
before starting the block of five re-exposure trials before each response trial. We
predict that the added amount of initial exposure used in this experiment should yield
enough incoming sensory evidence for subjects to update their forward model and
predict the delayed test tap.
With the increased amount of trials, each condition lasted between 15-18 minutes. The
entire experiment lasted approximately 80 minutes. Participants had a small break
between each condition where the experimenter asked them to remove their fingers
from the setup and stretch them. This was done to prevent tiredness and potential
numbness in their left index finger. The order of conditions and forces was randomized
for each participant.
Testing the same hypotheses as previous experiments, we expect again to replicate
previously shown results. We hypothesize that with the additional exposure to a
consistent delay will shift the usual patterns of attenuation in the opposite direction,
i.e. participants will not attenuate the immediate tap and attenuate the delayed tap
because subjects recalibrated their internal forward model. We expect a significant
decrease in the mean PSE of the no delay [0 ms, 0 ms] and constant delay [100 ms,
100 ms] condition compared to the mean PSE observed in the baseline condition.
Further, we predict a significant increase in mean PSE of the immediate touch during
delay exposure [100 ms, 0 ms] when compared to the no delay condition [0 ms, 0 ms].
Experiment three: Results
Again, as expected, we found significant attenuation of the immediate tap when
comparing the no delay condition (mean PSE = 1.78, SD = 0.11) [0 ms, 0 ms] to the
baseline (mean PSE = 1.997, SD = 0.12). Comparison was made using a paired
Wilcoxon signed rank test as the Shapiro-Wilk normality test was p = 0.05, V = 32, p
< 0.001. As in previous studies, we observed a significant difference between the
immediate and the delayed test tap [0 ms, 100 ms] (mean PSE = 1.91, SD = 0.12)

Side 26 af 51
during no delay exposure conditions, t(29) = 4.73, mean difference = 0.11, 95%
confidence interval [CI] = [0.15, 0.06], p < 0.001.
Figure 6. Experiment three results
Figure 6. The mean PSE gathered from each condition with bars
displaying ± standard error. Only the important comparisons are
displayed (*p < 0.05, ***p < 0.001, ns). With the added trials of exposure
subjects now attenuate the delayed test tap.
The reversal of the attenuation “pattern” of the immediate test tap is again replicated
in this experiment. With the added exposure we find a significant shift between the
immediate tap during no delay exposure [0 ms, 0 ms] and the immediate tap during
delay exposure [100 ms, 0 ms] (mean PSE = 1.89, SD = 0.13) when comparing with a
paired t-test, t(29) = -6.77, mean difference = 0.13, 95% confidence interval [CI] =
[0.18, 0.09], p < 0.001. Unlike the previous experiment, the immediate tap during delay
exposure [100 ms, 0 ms] was still significantly different from participants’ passive
perception of the forces, t(29) = 4.78, mean difference = 0.11, 95% confidence interval
[CI] = [0.15, 0.06], p < 0.001.

Side 27 af 51
Figure 7. Shift in attenuation of the immediate test tap
Figure 7. The logistic regression fitted using the group data of the
immediate test tap during exposure to no delay or a delay. Mean PSE and
Mean JND for each condition was used to make the fit. Participants
“unlearn” the prediction of the immediate test tap when they are exposed
to a 100 ms delay between their active tap and the test tap. As
demonstrated by the curve shifting towards the right during delay
exposure.
Importantly, we see the opposite shift in attenuation of the delayed test tap during no
delay exposure [0 ms, 100 ms] and delay exposure [100 ms, 100 ms] (mean PSE =
1.86, SD = 0.13), using a paired t-test, t(29) = 2.65, mean difference = 0.05, 95%
confidence interval [CI] = [0.01, 0.09], p = 0.013. Confirming, that given enough
exposure for error-based learning to take effect, subjects gradually update their internal
forward model and predict the delayed tap.

Side 28 af 51
Figure 8. Shift in attenuation of the delayed test tap.
Figure 8. The logistic regression fitted using the mean PSE and mean
JND at 75% of the delayed test tap during exposure to immediate touch
or during exposure to delayed touch. The left shift of the curve during
constant delay from the curve during no delay exposure demonstrates
that participants now predict and attenuate the delayed test tap.
Interestingly, all active conditions were significantly different from the baseline in this
experiment including the delayed test tap during immediate exposure [0 ms, 100 ms]
(paired t-test: t(29) = 3.60, mean difference = 0.08, 95% confidence interval [CI] =
[0.12, 0.03], p = 0.001). This is more in tandem with previous studies where the act of
movement itself requires a vast delay before perceived equally to passive experience
of the given sensory consequence (Bays et al, 2005). Yet, it is surprising given the
results of the two previous experiments.
In the third experiment, we replicate results from the previous two experiments.
Importantly, with the additional trials of exposure in the beginning of the experiment
participants updated their internal forward model. Subjects “unlearned” to predict the
immediate tap as indicated by the positive shift in PSE while they learned to reliably

Side 29 af 51
predict the delayed tap as indicated in the negative shift of the delayed tap.
In a motor adaptation study by Wei and Kording (2010), they had participants do a
reaching task where they would adapt trial-by-trial to visual perturbations. One of the
hypothesis was that with increased amount of uncertainty in sensory feedback slower
adaptation would be observed. In the study of Ivry and Taylor (2011) mentioned earlier
participants performance were still improving past the point of the 100 trials
mentioned. The small temporal delay used in this study in combination with a
somatosensory feedback being a short 100 ms tap and the overall nature of the task
can mean that feedback is uncertain and lag adaptation is slower. To investigate further
if more added exposure would lead to a bigger shift in attenuation we repeated the
same experiment while adding even more trials to the initial exposure period before
the onset of response trials.
Experiment four
In experiment four, we changed the amount of trials in the initial exposure block from
200 trials to 500 trials reasoning that with the added amount of exposure participants
had even more trials to gradually adapt their forward model to predict the delayed tap.
We expect to observe a larger shift in attenuation of the delayed than observed in
previous studies.
Thirty naïve participants (15 females and 15 males) between the ages of 18-32 (mean
age = 24.6, SD = 3.7) participated after providing written informed consent.
Participants handedness (27 right-handed and 3 ambidextrous) were assessed with the
Edinburgh Handedness Inventory (Oldfield, 1971). None of the participants knew the
hypotheses of the experiment and they were unable to guess the purpose of the
experiment either before or after the completion of the experiment.
Using the same task and design as experiment one, two, and three we collected the
point of subjective equality (PSE) after 500 trials of exposure. The PSE for each
condition was collected by fitting a logistic regression to the data points of each
condition (70 response trials in active conditions, and 105 response trials in the passive
condition). Participants did the same five conditions as previous experiments: No delay
[0 ms, 0 ms], test delay [0 ms, 100 ms], exposure delay [100 ms, 0 ms], constant delay
[100 ms, 100 ms], and the passive condition acting as a baseline of somatosensory

Side 30 af 51
perception. Order of forces and order of conditions were randomized for each
participant. Each condition lasted between 20-22 minutes. Participants had a short
break between each condition were the experimenter asked them to remove their hands
from the motor and stretch them in an attempt to avoid tiredness and numbness. The
entire session lasted between 90-105 minutes.
In this experiment, we’re testing the same hypothesis as previous experiments. We
expect to replicate previous shown results, particularly the results of experiment three.
Additionally, we hypothesize that with the additional trials subjects will more
accurately recalibrate and update their internal forward model to predict the delayed
test tap. As in previous experiments, we expect a significant decrease in mean PSE
during no delay exposure between the immediate [0 ms, 0 ms] and the delayed [0 ms,
100 ms] tap during response trials. We predict that during delay exposure this pattern
of attenuation of the immediate [100 ms, 0 ms] and the delayed [100 ms, 100 ms] test
tap will reverse. We expect a significant increase in mean PSE of the exposure delay
[100 ms, 0 ms] compared to the no delay condition [0 ms, 0 ms] and a significant
decrease in the constant delayed tap [100 ms, 100 ms] compared with the test delay [0
ms, 100 ms]. Further, as a result of the steady increase of initial exposure between
experiment two, three, and four, we predict there will be a significant increase in the
shift of immediate touch and a significant increase in the shift of the delayed touch
between the experiments.
Experiment four: Results
During 0 ms exposure we found significant attenuation of only the immediate test tap
[0 ms, 0 ms] (mean PSE = 1.82, SD = 0.14) when compared to the baseline (mean PSE
= 1.96, SD = 0.14) using a paired t-test, t(29) = 4.84, mean difference = 0.13, 95%
confidence interval [CI] = [0.19, 0.08], p < 0.001. The delayed tap during exposure to
immediate touch [0 ms, 100 ms] (mean PSE = 1.97, SD = 0.11) was not significantly
differently from the baseline as tested with a paired Wilcoxon Signed Rank test
(Shapiro-Wilk normality test, W = 0.85, p <0.001), V = 248, p = 0.76. As expected
from previous experiments, the delayed tap [0 ms, 100 ms] felt significantly more
intense than the immediate tap [0 ms, 0 ms] (Shapiro-Wilk normality test W = 0.88, p
< 0.001) paired Wilcoxon signed rank test, V = 15, p <0.001.

Side 31 af 51
Figure 9. Experiment four results
ff
Figure 9. Mean PSE gathered for each condition in experiment four with
bars displaying ± standard error. Only important comparisons are
displayed (**p < 0.01, *** p < 0.001, ns = not significant). Importantly,
participants attenuate the delayed tap after delay exposure.
After exposure to a 100 ms delay participants perception of the intensity of the
immediate tap significantly increased [100 ms, 0 ms] (mean PSE = 1.90, SD = 0.15)
in comparison to 0 ms delay exposure [0 ms, 0 ms], t(29) = 3.03, mean difference =
0.08, 95% Confidence interval [CI] = [0.13, 0.25], p < 0.01. There was only a trend
between the immediate tap after delay exposure [100 ms, 0 ms] and the baseline,
t(29) =1.74, mean difference = 0.06, 95% confidence interval [CI] = [-0.01, 0.12], p
= 0.092. This difference from both the immediate touch and the somatosensory
baseline suggests participants unlearned to accurately predict the immediate tap.

Side 32 af 51
Figure 10. Shift in attenuation of the immediate test tap
Figure 10. The logistic regressions fitted using the mean PSE and mean
JND at 75% of the no delay condition [0 ms, 0 ms] and the exposure
delay condition [100 ms, 0 ms]. The shift of the curve towards the right
indicates an increase in the perception of the intensity of the test tap
between the two conditions, suggesting participants no longer predict the
immediate tap after exposure to a 100 ms delay.
Vice versa, participants learned to predict the delayed tap after delay exposure [100
ms, 100 ms] (mean PSE = 1.88, SD = 0.15) as indicated by the significant decrease of
the mean PSE compared to the test delay condition [0 ms, 100 ms], t(29) = 3.52, mean
difference = 0.09, 95% confidence interval [CI] = [0.03, 0.14], p < 0.01. Additionally,
the delayed test tap after delay exposure [100 ms, 100 ms] was also significantly
different from the baseline, t(29) = 2.24, mean difference = 0.08, 95% confidence
interval [CI] = [0.007, 0.15], p = 0.03.

Side 33 af 51
Figure 11. Shift in attenuation of the delayed test tap
Figure 11. Logistic regressions fitted using the mean PSE and mean JND
for the test delay [0 ms, 100 ms] and constant delay [100 ms, 100 ms]
conditions. The shift towards the left indicates that participants perceive
the delayed tap less intense after delay exposure, meaning that they
updated their internal forward model and started to predict the delayed
tap.
Interestingly, the degree to which participants learned the delayed tap and unlearned
the immediate tap were significantly correlated: Pearson’s r = 0.473, t(28), p = 2.84, p
< 0.01. Lending evidence towards the hypothesis that a single internal forward model
is updated or recalibrated throughout the task rather than acquiring a new model.

Side 34 af 51
Figure 12. Correlation between learning and unlearning.
Figure 12. Scatterplot of the shifts in attenuation of the immediate touch
(unlearning in the x-axis) and delayed touch (learning in the y-axis). The
orange line indicates the fitted linear regression.
We hypothesized that as a result of added exposure between the experimental groups
we would see an increased shift in attenuation of the immediate tap and the delayed
tap (Figure 12). The shift for the immediate tap is the difference between the no delay
[0 ms, 0 ms] and exposure delay [0 ms, 100 ms] conditions. Similarly, attenuation of
the delayed tap is the difference between the test delay condition [0 ms, 100 ms] and
the constant delay condition [100 ms, 100 ms]. We did Welch Two Sample t-tests
between the mean shifts of immediate and delayed touch observed in each experiment.
There were no observed significant differences in the attenuation of the immediate tap
between any of the experiments. First, we compared the shift in attenuation of the
immediate tap between experiment two (mean shift = 0.04, SD = 0.07) and experiment
three (mean shift = 0.06, SD = 0.06), t(57.043) = 1.04, 95% confidence interval [CI] =
[-0.02, 0.05], p = 0.30. Second, we compared the shift in attenuation between
experiment two and experiment four (mean shift = 0.04, SD = 0.07), t(57.904) = 0.22,
95% confidence interval [CI] = [-0.03, 0.04], p = 0.83. Lastly, we compared the shift
in attenuation between experiment three and experiment four, t(56.4) = 0.79, 95%

Side 35 af 51
confidence interval [CI] = [-0.02, 0.05], p = 0.43. There can be several explanations as
of why the shift in attenuation of the immediate remained the same across the three
experiments regardless of the amount of exposure. One possible reason is that the
immediate tap is experienced similar to passive perception of the forces meaning there
could be a natural ceiling effect. Once participants unlearn to predict the immediate
tap it will not be perceived greater than baseline perception of touch.
Figure 13. Attenuation shifts between experiments
Figure 13. The shift in attenuation between experiments defined as the
PSE for each participant in the no delay condition [0 ms, 0 ms] subtracted
from the PSE of the exposure delay condition [100 ms, 0 ms] (A). Same
type of definition was used for the shift in attenuation of the delayed test
tap (B). The shift is defined as the PSE for each participant in the constant
delay condition [100 ms, 100 ms] subtracted from the test delay
condition [0 ms, 100 ms] (B). There were no differences in shift of the
attenuation of the immediate tap as a result of increased exposure (a).
However, we did see an interesting increase in the attenuation shift of
the delayed tap.
Additionally, we observed no significant shifts in attenuation of the delayed test tap.
First, we compared the shift in attenuation between experiment two (mean shift =
0.026, SD = 0.11) and experiment three (mean shift = 0.05, SD = 0.10), t(57,26) =

Side 36 af 51
0.85, 95% confidence interval [CI] = [-0.03, 0.08], p = 0.40. Second, we compared the
shift between experiment three and experiment four (mean shift = 0.09, SD = 0.14),
t(52.70) = 1.30, 95% confidence interval [CI] = [-0.02, 0.11], p = 0.20. Finally, we
compared the shift in attenuation of delayed touch in experiment two and experiment
four, t(55.5) = 1.97, 95% confidence interval [CI] = [-0.001, 0.13], p = 0.0543. While
we did not observe a significant difference in the shift of attenuation, there was a strong
trend between the resulting shift in attenuation of the delayed tap after 50 trials of
initial exposure and 500 trials of initial exposure. From these between experiment tests,
we cannot definitively conclude that the amount of initial exposure had an effect on
the observed shifts in attenuation. However, that we observed an effect in the
experiments with increased initial exposure (experiment three and four) compared to
experiment two with a limited amount of initial exposure suggests that exposure does
in fact affect learning to predict a temporal delay. Returning to the strong trend in
learning between experiment two and four, which does suggest that an effect could
exist. The question of degree of learning as a function of exposure is perhaps better
studied in a within-subject design which holds more statistical power, is more
sensitive, and provides considerably less error variance associated with individual
differences. This is an avenue for exploration in future experiments.
Discussion
In the present study we investigated if temporal recalibration can be reflected by
updating the sensory predictions made by an internal forward model. If this is the case
we should observe attenuation of self-generated but delayed touch when participants
are exposed to consistent delay. Further, if the parameters of a single existing forward
model are updated by incoming evidence in favor of delayed touch, predictions of
immediate touch would be abandoned in favor of delayed touch. As it turns out this is
indeed the case as indicated by the shifts in attenuation of immediate and delayed touch
in opposite facing directions in experiment three and four.
In all four experiments we saw immediate touch was no longer attenuated, thus no
longer predicted as a sensory consequence by the forward model. However, only in
experiment three and four did we observe significant attenuation of delayed touch.
This finding further suggest that predictions of a single forward model are updated

Side 37 af 51
rather than acquiring a new model. The asymmetry in findings of learning to predict
the delay and unlearning further indicates that different rates of learning and
unlearning occur, at a slow rate for the former and at a fast rate during the latter.
In the case of temporal perturbations, it is rather counter-intuitive that we unlearn to
expect immediate touch at a quicker rate than we learn to predict delayed touch.
Probability estimates based on prior experience should favor immediate touch since
we always experience self-generated touch as immediate throughout our lives. Such
asymmetry between learning and unlearning has previously been observed and is
thought to reflect identification of contextual change (Wolpert & Kawato, 1998, p.
1319). An explanation could be that the mismatch in temporal prediction identifies a
new experimental context and participants rapidly learn that the normal instantaneous
relationship between action and sensory consequence does not apply and then
gradually fine tune their predictions of delayed touch during exposure i.e. a large error
signal initially indicates contextual change and the error signal then gradually
decreases with learning (ibid.; Wolpert et al., 2011, p. 745). A two-state multi-rate
model based on the cerebellar cortex and the cerebellar nuclei has been proposed to
further explain observed asymmetries in timescales of learning, unlearning, and
relearning as the interaction between a fast and a slow learning process (Smith et al.,
2006). We can however only indirectly make this inference based on the results of
these experiments. A limit of the forced choice discrimination task used in these
experiments is that we cannot observe trial-to-trial adaptation. The PSE only informs
us of perceived equivalence between two forces at one point in time over the course of
the 70 trials required for fitting the logistic regression. More experiments directly
investigating this relationship between unlearning and learning of delays are needed.
These results conclusively demonstrate that when the forward model makes
predictions about sensory consequences of movement the temporal relationship is also
computed, compared, and updated. The cerebellum has been targeted as a likely
candidate where internal inverse and forward models reside (Miall, Weir, Wolpert, &
Stein, 1993; Wolpert, Miall, & Kawato, 1998). It has been demonstrated that
cerebellum is widely implicated in predictions of self-generated somatosensory
consequences (Blakemore, Wolpert, & Frith, 1999b; Blakemore, Frith, & Wolpert,
2001). Further it has also been demonstrated in attenuating the BOLD responses of
areas related to visual and auditory stimuli, meaning it not only predicts somatosensory

Side 38 af 51
consequences (Straube, et al., 2017). It also has important relevance for time
perception and temporal coordination of movements (Ashmore & Sommer, 2013; Ivry
& Keele, 1989; Jueptner et al., 1995). More importantly, cerebellum has a well-
established role in motor learning demonstrated through lesion, scanning, and
transcranial stimulation studies (Wolpert et al, 2011; Smith & Shadmehr, 2005; Tseng,
Diedrichsen, Krakauer, Shadmehr, & Bastian, 2007; Galea et al., 2011; Cao et al, 2017;
Butcher et al, 2017). It has also been shown how cerebellum activity reflects the
acquisition of an internal model for a new tool by a decreasing MR signal thought to
be caused by error in prediction (Imamizu et al., 2000). Demonstrating how we acquire
a new model and update it when we learn skillful use of a new tool (ibid.). Further,
this acquired model for a tool also computes the added mechanical delay of a tool and
its associated sensory consequences (Imamizu & Kawato, 2012, p. 334). Several
studies have been done on cerebellar activity during spatial perturbation which
demonstrate adaptation is cerebellar dependent (Tseng et al, 2007; Smith & Shadmehr,
2005; Butcher et al., 2017). However, an experiment applying single pulse
Transcranial Magnetic Stimulation (TMS) over the Posterior-Parietal Cortex (PPC)
found that this significantly interfered with learning (Della-Maggiore, Malfait, Ostry,
& Paus, 2004). The PPC has been suggested to represent the actual comparator in
models of sensory attenuation, which forms the basis for the error-signal, it can
monitor spatial and temporal congruence between the motor command and its
predicted multisensory consequence (Jeannerod, 2006, p. 83). It has been proposed
that initial learning of a skill or a tool is acquired in premotor and parietal area, but
with increasing training control becomes rapid and precise in a predictive fashion
reminiscent of the processing observed in cerebellum (Imamizu & Kawato, 2012).
Studies disrupting the primary motor cortex during learning tasks found no effects on
learning, however it does retain a skill once it has been learned (Hadipour-Niktarash,
Lee, Desmond & Shadmehr, 2007; Galea et al, 2011). Interestingly, a study applying
repetitive TMS over the primary motor cortex during periods of motor memory
consolidation did not interfere with memory formation (Baraduc, Lang, Rotwell, &
Wolpert, 2004). These findings further support the cerebellum and the premotor-
parietal network as primary areas of motor-skill learning and error-based learning.
Learning the temporal statistics of the external world is an important aspect of
engaging with the world and also for acquiring and interacting with tools that may

Side 39 af 51
have a mechanical delay between the motor command and the expected sensory
consequence (Imamizu & Kawato, 2012). It has been demonstrated that we carry
internal representations of temporal statistics which can be explained by rules of
Bayesian inference, further suggesting a predictive mechanism for sensorimotor
timing (Acerbi, Wolpert, & Vijayakumar, 2012). Previous studies measuring the
attenuation of activation in relevant sensory areas reveal that this suppression of
activity also happen during repetitive and predictable presentation of stimuli and is
thought to be predictive (Schafer & Marcus, 1973; Eagleman, 2008, p. 133). Studies
on temporal recalibration also reveal shifts in perception of simultaneity as a result of
asynchrony between two sensory events (Stetson et al., 2006; Vroomen et al., 2004;
Vroomen & Keetels, 2010).
This poses an important question to our results: Is the attenuation we observe a result
of error-based motor learning? Or can it be explained by the predictability of tactile
feedback between the left and right hand? Is it the time interval between the tactile
touch on both hands or do forward models predict an additional time delay between
motor action and predicted feedback? We observed that attenuation mostly occurred
in conditions of either constant immediate feedback or constant delayed feedback and
not in conditions where the test delay differed from the exposure delay, which is not
incompatible with such an account of the results. To conclusively test which
explanation is the case a control experiment of similar design should be performed.
Either by removing afferent sensory information of the right hand producing the
movement, in which case one would expect the same shifts we observe if participants
update an internal forward model. Or, by performing a cross-sensory recalibration
experiment similar to the control experiment of Stetson and colleagues (2006), where
we would predict no attenuation of the tap on the left finger after an external tactile
touch on a subject’s right finger. Such an experiment has been carried out using
discrimination of forces instead of temporal order judgements, the PSE observed was
not significantly different from passive somatosensory perception of the forces (Bays
et al, 2005). However, our study has many repetitions of this which could possibly
produce small attenuation by the sheer amount of times it is repeated. In a lag-
adaptation study using inhibitory TMS over cerebellum with a 15-minute 1 Hz
repetitive stimulation protocol and MEG measurements of sensory evoked potentials
participants triggered sounds by lifting their finger (Cao et al, 2017). The finger lift

Side 40 af 51
was detected by a laser, which would then trigger a sound after a short delay of 92 ms
(Cao et al., 2017). They find attenuation of evoked potentials in auditory areas within
300 trials as found by other E/MEG studies (Aliu et al., 2009; Elijah et al., 2016).
Crucially, there is no significant associated tactile event at the end of the movement
which triggers the sound, which lends further support in favor of updating an internal
forward model (Cao et al., 2017).
While research on cerebellar contributions to sensorimotor learning has benefitted a
lot from designs using force-field, visuomotor, and spatial adaptations, relatively few
studies have used similar implementations of lag adaptation. Cerebellar processing has
been shown to be highly temporally precise and adapted to operate in fast and precise
temporal regime (Sultan et al, 2012, p. 7). This also makes the cerebellum an ideal
target for temporal processing. In a study investigating several types of neurological
deficits on timing perception and production, they found that only patients with
cerebellar dysfunction showed deficiency in rhythmic tapping and differences in
stimuli duration (Ivry & Keele, 1989). They argue that a timing mechanism can be
conceptualized as an isolable part of the motor system, which predictive computations
is employed by perceptual and cognitive systems (ibid).
Cerebellar activity has for example been observed in fMRI during passive perception
of the rubber-hand illusion (Ehrsson, Spence, & Passingham, 2004; Ehrsson, Holmes,
& Passingham, 2005; Gentile, Guterstam, Brozzoli, & Ehrsson, 2013; Guterstam,
Gentile, & Ehrsson, 2013). Reflecting how cerebellar temporal processing generate
cross-modal timing predictions which are employed by premotor and intraparietal
cortices to judge congruency (Guterstam et al., 2013, p. 1096). It has also been
demonstrated to update predictions during sensorimotor learning of a timing delay
between action and sensory consequence (Cao et al., 2017). Inhibitory TMS applied
to the cerebellum during lag adaptation removed the trial-by-trial suppression of the
M100 component of evoked potentials observed in auditory cortex during the sham
condition (ibid., p 2447). Further, they find significantly increased attenuation of the
M100 component between the first session and the second session which are separated
by a 15-minute break (ibid., p. 2446). This is interesting as it could suggest
consolidation of implicit motor learning, further strengthening the hypothesis of
forward model predictions. Consolidation has been observed to have a considerable
effect on learning and later re-learning a perturbation after a short break (Krakauer,

Side 41 af 51
2009, p. 3). Cao and colleagues (2017) could reflect anterograde carryover effects of
learning to the second session, an expression of off-line learning (Krakauer, 2009, p.
3). While it may suggest that lag adaptation is a motor learning phenomenon, it is
meanwhile unclear whether TMS disrupted error-based learning, consolidation of
learning, or both. Recently a new computational model which demonstrates how
cerebellar learning mechanisms encode and learn prior distributions of time intervals
(Narain, Remington, De Zeeuw, Jazayeri, 2018). Further, it confirms that these
conform to rules of Bayesian inference and that these estimates can be captured by
learning in cerebellar cortex as well as computations in the cerebellar deep nuclei
(Acerbi et al., 2012; Narain et al., 2018).
Conclusion
This paper proposes that the observed shifts in attenuation during exposure to a
temporal delay reflects a form of motor learning which recalibrates and updates the
temporal parameters of the expected relationship between executed action and its
sensory consequence. This form of temporal learning, in contrast to motor learning
paradigms using force-field perturbations and visuomotor rotations, occurs in a
temporal domain. The purpose of this form of learning is to continually adjust temporal
dimensions of sensorimotor predictions in order to overcome difficulties of varying
delays in sensory feedback processing, changing conditions in our bodies, changes in
the environment, the changing nature of tasks, as well as the tools we acquire and use
to solve said tasks. Further, it is speculated that this learning is reflected in plastic
processes in the cerebellar cortex and the cerebellar deep nuclei, which has been
demonstrated to have very temporally precise and rapid processing, ideal for temporal
processing.

Side 42 af 51
Acknowledgements
I would like to say special thanks to Henrik Ehrsson for his supervision and granting
me the honour and the privilege to work at his lab: The Brain, Body, and Self
Laboratory. Next, I would like to thank Konstantina Kilteni for her co-supervision and
mentoring. I would also like to thank Paul Rousse and Martti Mercurio for assistance
with the equipment. Finally, I would like to thank all members past and present of The
Brain, Body and Self lab for their company, discussions and guidance.

Side 43 af 51
References
Acerbi, L., Wolpert, D. M. & Vijayakumar, S. (2012). Internal Representations of
Temporal Statistics and Feedback Calibrate Motor-Sensory Interval Timing. PLoS
computational biology, 8(11): e1002771. pp. 1-19.
Aliu, S. O., Houde, J. F. & Nagarajan, S. S. (2008). Motor-induced Suppression of
the Auditory Cortex. Journal of Cognitive Neuroscience (21)4, pp. 791-802.
Ashmore, R. C. & Sommer, M. A. (2013). Delay activity of saccade-related neurons
in the caudal dentate nucleus of the macaque cerebellum. Journal of
Neurophysiology, 109(8), pp. 2129-2144. doi: 10.1152/jn.00906.2011
Baraduc, P., Lang, N., Rothwell, J. C. & Wolpert, D. M. (2004). Consolidation of
dynamic motor learning is not disrupted by rTMS of primary motor cortex. Current
biology, 14(3), pp. 252-256.
Bays, P. M., Flanagan R. & Wolpert, D. M. (2006). Attenuation of Self-Generated
Tactile Sensations Is Predictive, not Postdictive. PLoS biologi, 4(2):e28, p. 281-284.
Bays, P. M, Wolpert, D. M. & Flanagan, J. R. (2005). Perception of the Consequence
of Self-Action Is Temporally Tuned and Event Driven. Current Biology, 15, pp.
1125-1128.
Berti, A. & Frassinetti, F. (2000). When far becomes near: remapping of space by
tool use. Journal of Cognitive Neuroscience, 12(3), pp. 415-420.
Blakemore, S. J., Frith, C. D. & Wolpert, D. M. (1999a). Spatio-Temporal Prediction
Modulates the Perception of Self-Produced Stimuli. Journal of Cognitive
Neuroscience, 11(5). pp. 551-559.
Blakemore, S., Wolpert, D. M. & Frith, C. D. (1999b). The Cerebellum Contributes
to Somatosensory Cortical Activity during Self-Produced Tactile Stimulation.
Neuroimage, 10, pp. 448-459.
Blakemore, S. J., Wolpert, D. & Frith, C. (2000). Why can’t you tickle yourself?
NeuroReport, 11(11), pp. 11-16.

Side 44 af 51
Blakemore, S. J., Frith, C. D. & Wolpert, D. M. (2001). The cerebellum is involved
in predicting the sensory consequences of action. Neuroreport, 12(9), pp. 1879-1884.
Botvinick, M. & Cohen, J. (1998). Rubber hands ’feel’ touch that eyes see. Nature,
391(6669), p. 756.
Butcher, P. A., Ivry, R. B., Kuo, S.-H., Rydz, D., Krakauer, J. W. & Taylor, J. A.
(2017). The cerebellum does more than sensory prediction error-based learning in
sensorimotor adaptation tasks. Journal of Neurophysiology, 118, pp. 1622-1636.
doi:10.1152/jn.00451.2017.
Cai, M., Stetson, C. & Eagleman, D., M. (2012). A neural model for temporal order
judgments and their active recalibration: a common mechanism for space and time?
Frontiers in psychology, 3(470), pp. 1-11.
Cai, C., Ogawa, K., Kochiyama, T., Tanaka, H. & Imamizu, H. (2018). Temporal
recalibration of motor and visual potentials in lag adaptation in voluntary movement.
Neuroimage, 172, pp. 654-662
Cao, L., Veniero, D., Thut, G. & Gross, J. (2017). Role of the Cerebellum in
Adaption to Delayed Action Effects. Current Biology 27, pp. 2442-2451.
Decety, J. & Jeannerod, M. (1996). Fitts’ Law in mentally represented actions.
Behavioural Brain Research, 72, 127-134.
Decety, J., Jeannerod, M. & Prablanc, C. (1989). The timing of mentally represented
actions. Behavioural Brain Research, 34, pp. 35-42.
Della-Maggiore, V., Malfait, N., Ostry, D. J. & Paus, T. (2004). Stimulation of the
posterior parietal cortex interferes with arm trajectory adjustments during the
learning of new dynamics. Journal of Neuroscience, 24(44), pp. 9971-9976.
Desantis, A., Weiss, C., Schütz-Bosbach, S. & Waszak, F. (2012). Believing and
Perceiving: Authorship Belief Modulates Sensory Attenuation. PLoS one,
7(5):e37959, pp. 1-5
Eagleman, D. M. (2008). Human time perception and its illusions. Current opinion in
Neurobiology, 18, pp. 131-136.

Side 45 af 51
Ehrsson, H. H., Spence, C. & Passingham, R. E. (2004). That’s my hand! Activity in
premotor cortex reflects feeling of ownership of a limb. Science, 305(5685), pp. 875-
877. DOI: 10.1126/science.1097011
Ehrsson, H. H., Holmes, N. P. & Passingham R. E. (2005). Touching a rubber hand:
feeling of body ownership is associated with activity in multisensory brain areas.
Journal of Neuroscience, 25(45), pp. 10564-10573.
Elijah, R. B., Le Pelley, M. E. & Whitford T. J. (2016). Modifying temporal
expectations: Changing cortical responsivity to delayed self-initiated sensations with
training. Biological Psychology, 120, pp. 88-95.
Farné, A. & Làdavas, E. (2000). Dynamic size-change of hand peripersonal space
following tool use. Neuroreport, 11(8), pp. 1145-1149.
Franklin, D. W. & Wolpert, D. M. (2011). Computational mechanisms of
sensorimotor control. Neuron, 72, pp. 425-442.
Fujisaki, W., Shimojo, S., Kashino, M., Nishida, S. (2004). Recalibration of temporal
order perception by exposure to audio-visual asynchrony. Nature Neuroscience,
7(11). pp. 773-778.
Fujisaki, W. & Nishida, S. (2009). Audio–tactile superiority over visuo–tactile and
audio–visual combinations in the temporal resolution of synchrony perception.
Experimental Brain Research (198). pp. 245-259.
Galea, J. M., Vasquez, A., Pasricha, N., Orban de Xivry, J.-J. & Celnik, P. (2011).
Dissociating the Roles of the Cerebellum and Motor Cortex during Adaptive
Learning: The Motor Cortex Retains What the Cerebellum Learns. Cerebral Cortex,
21(8), pp. 1761-1770. doi: 10.1093/cercor/bhq246.
Gentile, G., Guterstam, A., Brozzoli, C. & Ehrsson, H. H. (2013). Disintegration of
Multisensory Signals from the Real Hand Reduces Default Limb Self-Attribution:
An fMRI Study. Journal of Neuroscience. 33(33), pp. 13350-13366.
doi: 10.1523/JNEUROSCI.1363-13.2013.

Side 46 af 51
Gentsch, A. & Schütz-Bosbach, S. (2011). I did it: unconscious expectation of
sensory consequences modulates the experience of self-agency and its function
signature. Journal of Cognitive Neuroscience, 23(12), pp. 3817-3828.
Georgopoulos, A. P. & Massey, J. T. (1987). Cognitive spatial-motor processes.
Experimental Brain Research, 65, pp. 361-370.
Guterstam, A., Gentile, G. & Ehrsson, H. H. (2013). The invisible hand illusion:
multisensory integration leads to the embodiment of a discrete volume of empty
space. Journal of Cognitive Neuroscience, 25(7), pp. 1078-1099. doi:
10.1162/jocn_a_00393
Hadipour-Niktarash, A., Lee, C. K., Desmond, J. E. & Shadmehr, R. (2007).
Impairment of retention but not acquisition of a visuomotor skill through time-
dependent disruption of primary motor cortex. Journal of Neuroscience, 27(49), pp.
13413-13419.
Haggard, P., Clark, S. & Kalogeras, J. (2002). Voluntary action and conscious
awareness. Nature neuroscience, 5(4). pp. 382-385.
Hanson, J. V. M., Heron, J. & Whitaker, D. (2008). Recalibration of perceived time
across sensory modalities. Exp Brain Res., 185, pp. 347-352.
Heron, J., Hanson, J. V. M., & Whitaker, D. (2009). Effect before Cause:
Supramodal Recalibration of Sensorimotor Timing. PLoS ONE 4(11) e7681.
doi:10.1371/journal.pone.0007681 pp. 1-7.
von Holst, E. (1954). Relations between the central nervous system and the
peripheral organs. British Journal of Animal Behaviour. 2, pp. 464–76.
Imamizu, H., Miyauchi, S., Tamada, T., Sasaki, Y., Takino, R., Pütz, B., Yoshioka,
T. & Kawato, M. Human cerebellar activity reflecting an acquired internal model of
a new tool. Nature, 403, pp. 192-195.
Imamizu, H. & Kawato, M. (2012). Cerebellar Internal Models: Implications for the
Dexterous Use of Tools. Cerebellum, 11, pp. 325-335. DOI 10.1007/s12311-010-
0241-2

Side 47 af 51
Ivry, R. B. & Keele, S. W. (1989). Timing functions of the cerebellum. Journal of
cognitive neuroscience, 1(2), pp. 136-152. doi: 10.1162/jocn.1989.1.2.136.
Jeannerod, M (2006). Motor cognition – What Actions Tell the Self. Oxford
University Press.
Jueptner, M., Rijntjes, M., Weiller, C., Faiss, J. H., Timmann, D., Mueller, S. P. &
Diener, H. C. (1995). Localization of a cerebellar timing process using PET.
Neurology, 45(8), pp. 1540-1545.
Kilteni, K. & Ehrsson, H. H. (2017a). Sensorimotor predictions and tool use: Hand-
held tools attenuate self-touch. Cognition, 165, pp. 1-9.
Kilteni, K & Ehrsson, H. H. (2017b). Body ownership determines the attenuation of
self-generated tactile sensations. PNAS, 114(31), pp. 8426-8431.
doi/10.1073/pnas.1703347114
Kilteni, K., Andersson, B., Houborg, C. & Ehrsson, H. H. (2018). Motor imagery
involves predicting the sensory consequences of the imagined movement. Nature
Communications, 9(1617), pp. 1-9. doi: 10.1038/s41467-018-03989-0.
Körding, K. P. & Wolpert, D. M. (2004). Bayesian integration in sensorimotor
learning. Nature, 427, pp. 244-247.
Körding, K. P. & Wolpert, D. M. (2006). Bayesian decision theory in sensorimotor
control. Trends in Cognitive Sciences. 10(7), pp. 319-326.
Krakauer, J. W. (2009). Motor learning and consolidation: the case of visuomotor
rotation. Advances in experimental medicine and biology, 629, pp. 405-421.
Krakauer, J. W. & Mazzoni, P. (2011). Human sensorimotor learning: adaptation,
skill, and beyond. Current opinion in neurobiology, 21(4), pp. 636-644. doi:
10.1016/j.conb.2011.06.012
Kuling, I. A., van Eijk, R. L. J., Juola, J. F. & Kohlrausch, A. (2012). Effects of
stimulus duration on audio-visual synchrony perception. Exp Brain Res (221). pp.
403-412.

Side 48 af 51
Ley, I., Haggard, P. & Yarrow, K. (2009). Optimal Integration of Auditory and
Vibrotactile Information for Judgements of Temporal Order. Journal of
Experimental Psychology: Human Perception and Performance (35)4, 1005-1019.
Machulla, T., Di Luca, M. & Ernst, M. O. (2016). The Consistency of Crossmodal
Synchrony Perception Across the Visual, Auditory, and Tactile Senses. Journal of
Experimental Psychology: Human Perception and Performance, (42)7, 1026-1038.
McDougle, S. D., Bond, K. M. & Taylor, J. A. (2015). Explicit and Implicit
Processes Constitue the Fast and Slow Processes of Sensorimotor Learning. Journal
of Neuroscience, 35(26), pp. 9568-9579. doi:10.1523/JNEUROSCI.5061-14.2015.
Miall, R. C., Weir, D. J., Wolpert, D. M. & Stein, J. F. (1993). Is the Cerebellum a
Smith Predictor? Journal of Motor Behavior, 25(3), pp. 203-216.
Narain, D., Remington, E. D., De Zeeuw, C. I. & Jazayeri, M. (2018). A cerebellar
mechanism for learning prior distributions of time intervals. Nature communications,
9:469, pp. 1-12.
Oldfield, R. C. (1971). The assessment and analysis of handedness: the Edinburgh
inventory. Neuropsychologia, 9(1), pp. 97-113.
Palmer, C. E., Davare, M. & Kilner, J. M. (2016). Physiological and Perceptual
Sensory Attenuation Have Different Underlying Neurophysiological Correlates.
Journal of Neuroscience, 36(42). Oo. 10803-10812.
Pariyadath V, Eagleman D (2007) The Effect of Predictability on Subjective
Duration. PLoS ONE 2(11): e1264. https://doi.org/10.1371/journal.pone.0001264,
pp. 1-6.
Rose, D. & Summers, J. (1995). Duration illusions in a train of visual stimuli.
Perception, 24(10), pp. 1177-1187.
SanMiguel, I., Saupe, K. & Schrögger, E. (2013). I know what is missing here:
electrophysiological predictin error signals elicited by omissions of predicted “what”
but not “when”. Frontiers in human neuroscience, 7(407), pp. 1-10
doi:10.3389/fnhum.2013.00407.

Side 49 af 51
Schafer, E. W & Marcus, M. M. (1973). Self-stimulation alters human sensory brain
responses. Science, 181(4095), pp. 175-177.
Shergill, S. S., Bays, P. M., Frith, C. D. & Wolpert, D. (2003). Two Eyes for an Eye:
The Neuroscience of Force Escalation. Science, 301, p. 187.
Smith, M. A. & Shadmehr, R. (2005). Intact ability to learn internal models of arm
dynamics in Huntington’s disease but not cerebellar degeneration. Journal of
neurophysiology, 93(5), pp. 2809-2821).
Smith, M. A., Ghazizadeh, A. & Shadmehr, R. (2006). Interacting Adaptive
Processes with Different Timescales Underlie Short-Term Motor Learning. PLoS
Biology, 4(6), pp. 1035-1043. https://doi.org/10.1371/journal.pbio.0040179
Sperry, R. W. (1950). Neural basis of the spontaneous optokinetic response produced
by visual inversion. Journal of Comparative and Physiological Psychology. 43, pp.
482-489.
Stetson, C., Cui, X., Montague, P. R. & Eagleman, D. M. (2006). Motor-Sensory
Recalibration Leads to an Illusory Reversal of Action and Sensation. Neuron, (51).
pp. 651–659.
Straube, B., van Kemenade, B. M., Arikan, B. E., Fiehler, K., Leube, D. T., Harris,
L. R. & Kircher, T. (2017). Predicting the Multisensory Consequences of One’s Own
Action: BOLD Supression in Auditory and Visual Cortices. PLoS one, 12(1):
e0169131, doi:10.1371/journal.pone.0169131
Sultan, F., Augath, M., Hamodeh, S., Murayama, Y., Oeltermann, A., Rauch, A. &
Their P. (2012). Unravelling cerebellar pathways with high temporal precision
targeting motor and extensive sensory and parietal networks. Nature
communications, 3:924, pp. 1-10. DOI: 10.1038/ncomms19
Synofzik, M., Vosgerau, G. & Newen, A. (2008). Beyond the comparator model: A
multifactorial two-step account of agency. Consciousness and Cognition 17, pp.
219–239.

Side 50 af 51
Taylor, J. A. & Ivry, R. B. (2011). Flexible Cognitive Strategies during Motor
Learning. PLoS computational biology, 7(3): e1001096, pp. 1-13.
doi:10.1371/journal.pcbi.1001096
Taylor, J. A., Krakauer, J. W. & Ivry, R. B. (2014). Explicit and implicit
contributions to learning in a sensorimotor adaptation task. Journal of Neuroscience,
34(8), pp. 3023-3032. doi:10.1523/JNEUROSCI.3619-13.2014
Tse, P. U., Intriligator, J., Rivest, J. & Cavanagh, P. (2004). Attention and the
subjective expansion of time. Percept Psychophys. 66(7), pp. 1171-89.
Tseng, Y.-W., Diedrichsen, J., Krakauer, J. W., Shadmehr, R. & Bastian, M. S.
(2007). Sensory prediction errors drive cerebellum-dependent adaptation of reaching.
Journal of Neurophysiology. 98, pp. 54-64.
Ting, X., Ding, N., Teng., X. Bai, F. & Poeppel D. (2018). Imagined speech
influences perceived loudness of sound. Nature human behaviour, 2, pp. 225-234.
Vroomen, J., Keetels, M., de Gelder, B. & Bertelson, P. (2004). Recalibration of
temporal order perception by exposure to audio-visual asynchrony. Cognitive Brain
Research (22). pp. 32–35.
Vroomen, J. & Keetels, M. (2010). Perception of intersensory asynchrony: A tutorial
review. Attention, Perception & Psychophysics, 72(4), pp. 871-884.
Wei, K. & Körding, K. (2010). Uncertainty of Feedback and State Estimation
Determines the Speed of Motor Adaption. Frontiers in Computational Neuroscience.
4(11), pp. 1-9.
Whitford, T. J., Jack, B. D., Pearson, D., Griffiths, O., Luque, D., Harris, A. W. F.,
Spencer, K. M. & Le Pelley, M. E. (2017). Neurophysiological evidence of efference
copies to inner speech. eLIFE, 6:e28197. pp. 1-23. DOI:
https://doi.org/10.7554/eLife.28197
Wolpert, D. M. & Flanagan, J. R. (2001). Motor prediction. Current biology, 11, pp.
R729-R732
Wolpert, D. M. & Kawato, M. (1998). Multiple paired forward and inverse models
for motor control. Neural Networks, 11, pp. 1317-1329.

Side 51 af 51
Wolpert, D. M., Miall., R. C. & Kawato, M. (1998). Internal models in the
cerebellum. Trends in Cognitive Sciences 2, pp. 338-347
Wolpert, D. M., Diedrichsen, J. & Flanagan, J. R. (2011). Principles of sensorimotor
learning. Nature reviews: Neuroscience (12), pp. 739-751.