Embed Size (px)
Citation preview
Sensitivity
Range
Precision
Accuracy
Resolution
Offset
Hysteresis
Response Time
Sensing and Sensors: Fundamental Concepts
2013
Source: sensorwebs.jpl.nasa.gov
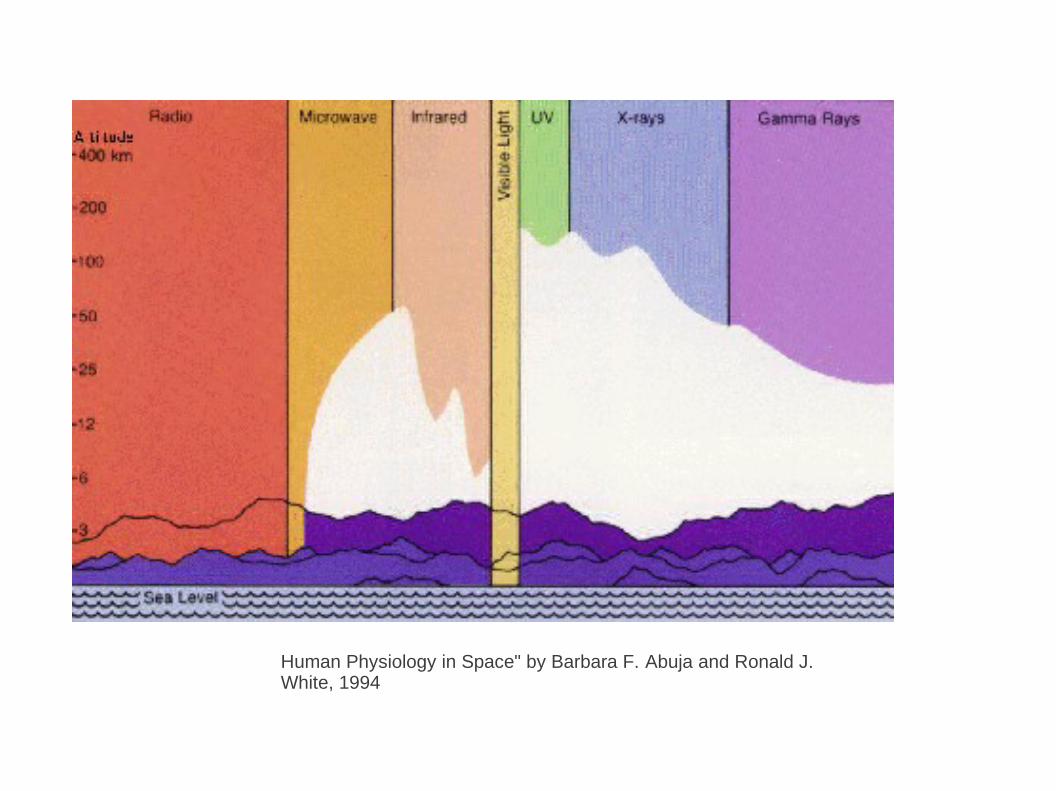
Human Physiology in Space" by Barbara F. Abuja and Ronald J. White, 1994

frequency = dE / hh: Planck’s constant
6.626068 × 10-34 m2 kg / s

In the animal world, sensing requires a highly specialized apparatus to perceive certain signals. The more refined the apparatus becomes, the better use it can be put to.
Sonar, for example, measures acoustic location in air or water. Echolocation is the term used to describe sonar in mammals such as whales and bats. In echolocation, ranging is achieved by measuring the time delay between the animal's own sound emission and any echoes that return from the environment.
Echolocating animals make use of the fact that they have two ears positioned slightly apart. The echoes returning to the two ears arrive at different times and at different loudness levels, depending on the position of the object generating the echoes. The time and loudness differences are used by the animals to perceive direction and distance. With echolocation the animal can see not only where it's going but can also discern size and texture of objects in its path even when other sensors (such as vision) utterly fail (on a dark night.Most insectivorous bats call with dominant frequencies between 20 kHz and 60 kHz. Lower frequencies are avoided because echoes from insect-sized targets are weak when the wavelength is longer than the insect wing length.
Bat echolocation calls: adaptation and convergent evolutionGareth Jones* and Marc W. Holderied, Proc. R. S oc. B (2007) 274, 905– 912

Sensing – natural, human, synthetic
Natural systemsSensing mostly reflexive (as far as we humans know)
Human beingsSensing intuitive, reflexive and intimately linked to cognition and every aspect related to cognition (philosophy, culture)
Synthetic systemsInspired by natural systems, modeled by laws of physics, implemented in mechanical and electronic media, commonly known as sensors and transducers

Sensors do not 'function' alone; they are always part of a larger system -

A sensor is a device that receives a stimulus and responds with an electrical signal
A transducer is a converter from one type of energy into another one.Loudspeaker: electric signal -> variable magnetic field -> acoustic wave / sound
Direct sensor: converts a stimulus into an electrical signal by using a physical effect (photo effect, for example)
Complex sensor: needs in addition one or more transducers before the sensor can generate an electrical signal.

Classifying sensors
passive vs active
passive sensorsneeds no additional power, generates an electric signal directly in response to an external stimulus >> examples: photodiode, piezoelectric sensor
active sensorsrequire external power for their operation (an excitation signal. This signal, in turn, is modified by the sensor to produce an output. So their own properties change in response to the external input (they are parametrice.>> examples: thermistor (temperature sensitive resistor)
contact vs non-contact
contact sensorssensors that detect change through direct physical contact with a target object>>examples: limit switches, safety switches
non-contact sensorssensors that create an energy field or beam and react to disturbances in that field; no physical contact is required>>examples: ultrasonic sensors
Basic concepts
Sensitivity the minimum input (of a physical parameter) that will create a detectable output
Range the minimum and maximum values of a given parameter the sensor can measure.
Precisionthe ability of the sensor to reproduce the same results in repeated tests of identical conditions
Accuracythe maximum difference between the actual value and the value indicated by the sensor
Resolutionthe smallest detectable incremental change of input that can be detected in the output signal
Offsetthe output existing in the absence of input
Hysteresisthe effect of direction of the input on the output
Response TimeTime required for a sensor to change from a previous state to a new state (within a tolerance band)

Accuracy
better: Inaccuracymeasured as the highest deviation of a value represented by the sensor from the ideal of true values at its input, (with a specific level of uncertainty)
example:a linear displacement-sensor should generate 1 mV per 1 mm displacement. However, measurement shows that a displacement of s = 10.5 mm produced and output of S = 10.0V
1/b = 1mm/mVsx = S/b = 10.5mm, s
x – s = 0.5 (0.5 mm in error)
inaccuracy = (0.5mm/10mm)* 100% = 5%
->often the deviation from the ideal transfer function is given as δ (+-δ) in terms of the measured value or as percentage of the full span input or in terms of the output
-> often one performs accuracy ratings to find the real performance of a sensor. They include combined effects of variations, hysteresis, dead band, calibration and repeatability errors -> worst case scenario

Repeatability
Ability to recreate the same result under the same condition at different times. It is often expressed as the maximum difference between output readings from two calibrating cycles:
δr = (Δ / FS)*100% (FS: full scale)
Dead Band
An insensitivity of a sensor in a specific range of input signals – the sensor's blind spot.
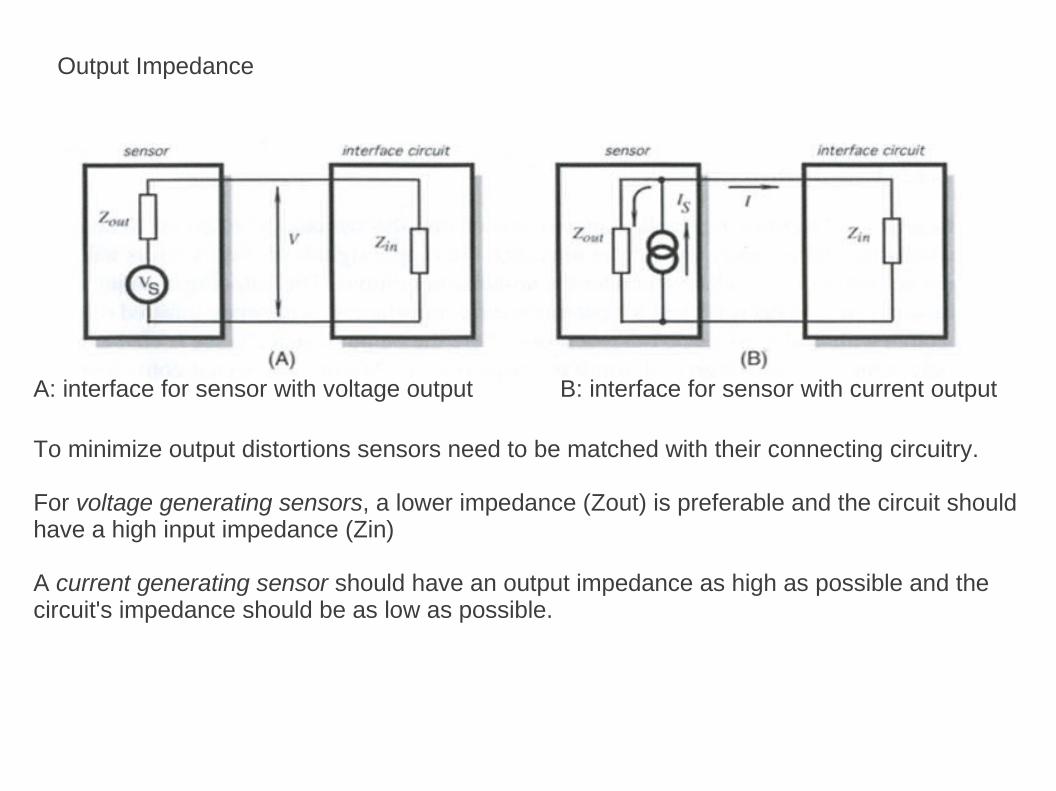
Output Impedance
A: interface for sensor with voltage output B: interface for sensor with current output
To minimize output distortions sensors need to be matched with their connecting circuitry.
For voltage generating sensors, a lower impedance (Zout) is preferable and the circuit should have a high input impedance (Zin)
A current generating sensor should have an output impedance as high as possible and the circuit's impedance should be as low as possible.

Reliability
Reliability is the ability of a sensor to perform a required function under stated conditions for a stated period of time. It is often expressed in statistical terms as a probability that the device will function without failure for a number of uses.
Because of this, reliability of a class or batch of devices is evaluated by observing the behavior of a large number of devices. Devices that have been fabricated with the same technology, same materials, and same processes are then assumed to behave in the same way (assumed reliability).

A sensor can have more that one dimension if the sensor's output is influenced by more than one input stimulus
example: infrared sensor V = G*( Tb
4 – Ts
4) 4th order parabola
where Ts = temp of sensor surface, Tb = temp of an object of measurement and G a constant

Hysteresis
Hysteresis refers to systems which have “memory”; that is, the effects of the current input to the system are not felt at the same instant. Such a system may exhibit “path dependence”.
In a deterministic system with no hysteresis, it is possible to predict the system's output at an instant in time, given only its input at that instant in time. In a system with hysteresis, this is not possible; there is no way to predict the output without knowing the system's current state.
Hysteresis phenomena occur in magnetic and ferro-magnetic materials, in which a lag occurs between the application and the removal of a force or field and its subsequent effect.
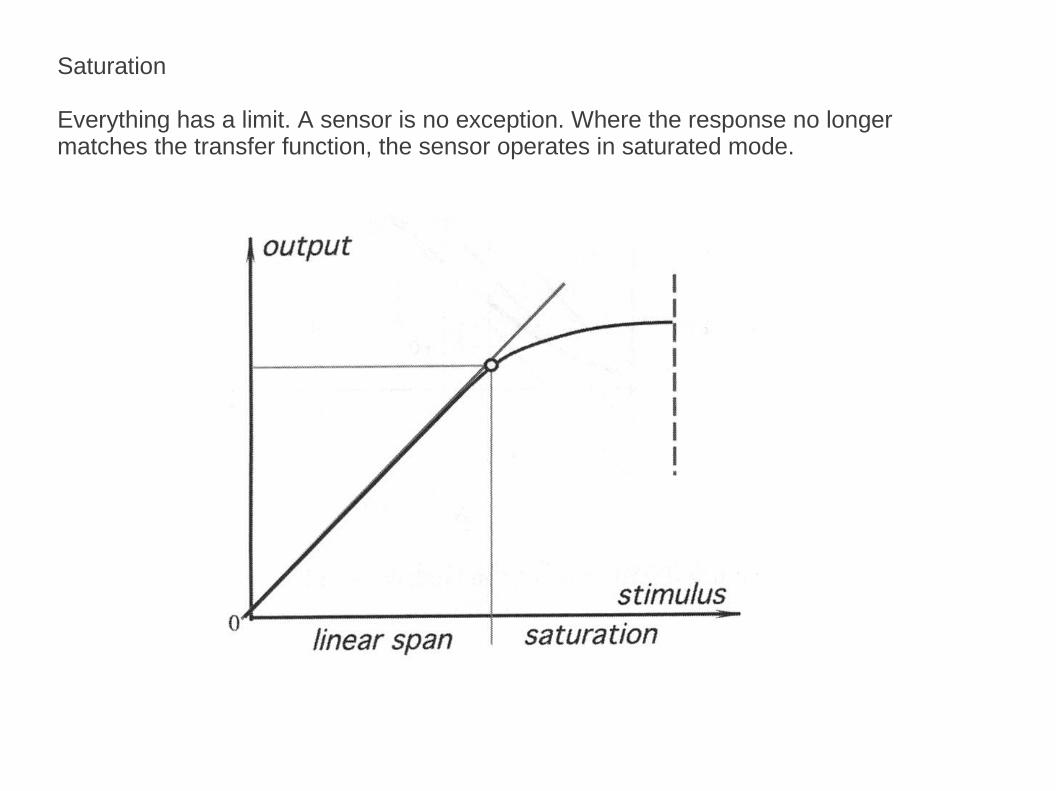
Saturation
Everything has a limit. A sensor is no exception. Where the response no longer matches the transfer function, the sensor operates in saturated mode.
Resolution
Smallest increments of stimuli which can be sensed. Resolution is often expressed as a percent of full scale (FS).
Example: an angular sensor has a FS of 270 deg, and its 0.5 deg resolution would be specified as 0.181% FS.
When there are no measurable steps in the output of a sensor it is said to be continuous.
Often the resolution is not constant over the whole input range.
In digital sensors, the resolution is specified as the number of bits used to represent the output, as in '8-bit resolution', where the result is represented by 8 bit long data for FS.

Excitation
This is the electric signal often needed to make a sensor active for operation. Excitation is often listed as a range of voltage and or current. In some sensors, the frequency of excitation is also important (and must be specified).
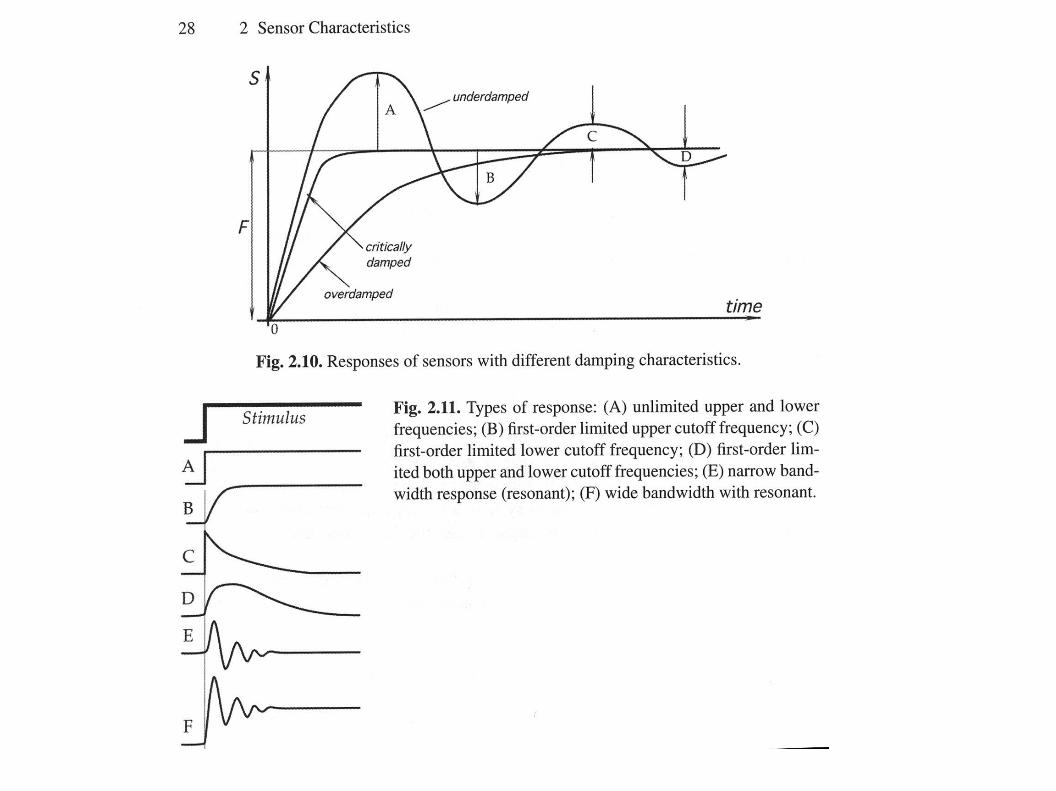
Dynamic Characteristics
Sensors react with a certain delay to inputs. Sensors are, in this regard, said to be time dependent and show a dynamic characteristic.
Some sensors need a warm-up period before they can operate reliably.
Including time dependency leads to a different kind mathematical description of sensor behavior, one based on differential equations.
Zero order sensor Out(t) = a + b * i(t) a: static sensitivity
First oder sensor b1*(dOut(t)/dt) + b
0*Out(t) = i(t)
Second order sensor b2*(d2Out(t)/dt2) + b
1*(dOut(t)/dt) + b
0*Out(t) = i(t)
Example of first order sensor
Temperature sensor for which the energy storage is thermal capacity (stays hot for n sec)Often such sensors are described by a frequency response: how fast they can respond to a changed input
Example of a second order sensor
Accelerometer that incorporates a mass and a spring. A second oder response is typical for a sensor that responds with a periodic signal. This is the systems resonant frequency. Typically, the operating range of a sensor is selected below or above the resonant frequency.For some special sensors , however, the resonant frequency IS the operating point (that is where they will have the strongest response).
Damping is the suppression of oscillation in a sensor of order > 1.
When the sensor's response is maximally fast without overshoot, the response is calledcritically damped.
If an overshoot occurs, the sensor is said to react in under-damped response.
If a sensor reacts slower than its max response, it is said to react in over-damped response.