-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
1/115
Smart Structures Bio-Nano Laboratory
A MAGNETORHEOLOGIC SEMI-ACTIVE
ISOLATOR TO REDUCE NOISE AND VIBRATIONTRANSMISSIBILITY IN
AUTOMOBILES
Gregory J. Stelzer
Delphi Automotive Systems
Chassis Systems Test Center, Dayton, OH 45401-1245
Mark J. Schulz, Jay Kim, Randall J. Allemang
Department of Mechanical EngineeringUniversity of Cincinnati,
Cincinnati, OH 45221-0072
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
2/115
Smart Structures Bio-Nano Laboratory
OUTLINE1. INTRODUCTION1. INTRODUCTION
2. BACKGROUND2. BACKGROUND
3. MODELING OF RHEOLOGIC FLUIDS3. MODELING OF RHEOLOGIC
FLUIDS
4. MODELING OF ISOLATION SYSTEMS4. MODELING OF ISOLATION
SYSTEMS
5. RESULTS5. RESULTS
6. MR ISOLATOR COIL DESIGN6. MR ISOLATOR COIL DESIGN
7. CONCLUSIONS7. CONCLUSIONS
8. RECOMMENDATIONS OF FUTURE WORK8. RECOMMENDATIONS OF FUTURE
WORK
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
3/115
Smart Structures Bio-Nano Laboratory
11--1. INTRODUCTION1. INTRODUCTION Passive vibration isolators
are inexpensive and simple. For thePassive vibration isolators are
inexpensive and simple. For these reasons,se reasons,
most isolation systems in automobiles use passive isolators.most
isolation systems in automobiles use passive isolators.
When using a passive vibration isolator, there is a tradeoff
betWhen using a passive vibration isolator, there is a tradeoff
between Noise,ween Noise,Vibration, and Harshness (NVH) performance
and durability characVibration, and Harshness (NVH) performance and
durability characteristics.teristics.
Passive isolators cannot provide both optimal isolation and
optiPassive isolators cannot provide both optimal isolation and
optimalmal
durability.durability.
The object of this thesis is to develop an advanced vibration
isThe object of this thesis is to develop an advanced vibration
isolatorolator
design for automotive components that can provide substantial
andesign for automotive components that can provide substantial and
costd cost--
effective improvements in NVH performance.effective improvements
in NVH performance.
The new work in this thesis will provide:The new work in this
thesis will provide:
1.1. Information on the advantages and limitations of
semiInformation on the advantages and limitations of semi--active
isolation.active isolation.
2.2. A detailed nonlinear model of the isolator.A detailed
nonlinear model of the isolator.
3.3. The results of extensive simulation studies of a practical
desigThe results of extensive simulation studies of a practical
design.n.
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
4/115
Smart Structures Bio-Nano Laboratory
11--2. INTRODUCTION2. INTRODUCTION In the automotive industry,
noise control expectations from theIn the automotive industry,
noise control expectations from the end userend user
are becoming more strict, and consequently the Original
Equipmenare becoming more strict, and consequently the Original
Equipmentt
Manufacturer (OEM) has responded by placing higher
expectationsManufacturer (OEM) has responded by placing higher
expectations on theon the
suppliers.suppliers.
Noise control specifications have now become standard on many
ofNoise control specifications have now become standard on many
ofthethe
smallest components in the vehicle.smallest components in the
vehicle.
A customer will now use component performance to develop a listA
customer will now use component performance to develop a list
ofof
acceptable candidates, and then use NVH to determine where the
bacceptable candidates, and then use NVH to determine where the
businessusiness
is awarded.is awarded.
This increased emphasis on noise reduction and operator
comfortThis increased emphasis on noise reduction and operator
comfort isis
requiring that more attention be paid to the use of vibration
anrequiring that more attention be paid to the use of vibration and
noised noise
isolation and attenuation systems in automobiles.isolation and
attenuation systems in automobiles.
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
5/115
Smart Structures Bio-Nano Laboratory
11--3. INTRODUCTION3. INTRODUCTION A compressor, used in an
automobiles leveling systems, will beA compressor, used in an
automobiles leveling systems, will be used asused as
an example in this research.an example in this research.
A leveling system is used to keep a vehicle level with respect
tA leveling system is used to keep a vehicle level with respect to
roado roadsurface,surface, ieie, when a load is placed in the back
of the truck, the rear, when a load is placed in the back of the
truck, the rear
suspension is compressed more than the front. A leveling
systemsuspension is compressed more than the front. A leveling
system willwill
raise the back end of the vehicle so that it is once again
levelraise the back end of the vehicle so that it is once again
level with thewith the
front.front.
The compressor pumps air into the vehicle shocks, and this is
whThe compressor pumps air into the vehicle shocks, and this is
whatat
raises the back end of the vehicle.raises the back end of the
vehicle.
When the compressor runs, it generates high frequency
vibrationWhen the compressor runs, it generates high frequency
vibration that isthat is
transmitted to the vehicle structure.transmitted to the vehicle
structure.
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
6/115Smart Structures Bio-Nano Laboratory
11--4. INTRODUCTION4. INTRODUCTION In this research, the
compressor will be modeled as a mass withIn this research, the
compressor will be modeled as a mass with a forcea force
that produces high frequency excitation.that produces high
frequency excitation.
The isolator design will minimize the transmitted force from
theThe isolator design will minimize the transmitted force from
thecompressor to its structural base, a vehicle body.compressor to
its structural base, a vehicle body.
From this point, the component generating the high frequency
excFrom this point, the component generating the high frequency
excitationitation
will be referred to as a compressor.will be referred to as a
compressor.
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
7/115Smart Structures Bio-Nano Laboratory
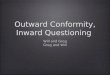
FIGURE 1.1. A compressor assembly with passive isolators.FIGURE
1.1. A compressor assembly with passive isolators.
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
8/115Smart Structures Bio-Nano Laboratory
22--1. VIBRATION ISOLATORS1. VIBRATION ISOLATORS A vibration
isolator is a flexible device that is used to attachA vibration
isolator is a flexible device that is used to attach thethe
compressor to a mounting base.compressor to a mounting base.
The purpose of the isolator is to reduce the vibration or
forceThe purpose of the isolator is to reduce the vibration or
forcetransmitted between the compressor and the base.transmitted
between the compressor and the base.
Different possible approaches for vibration isolation of
automobDifferent possible approaches for vibration isolation of
automobileile
components are described and compared.components are described
and compared. The following systems areThe following systems
arediscussed:discussed:
1.1. Passive isolation systems.Passive isolation systems.
2.2. SemiSemi--active isolation systems.active isolation
systems.
3.3. Active isolation systems.Active isolation systems.
4.4. Smart materials for actuators.Smart materials for
actuators.
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
9/115Smart Structures Bio-Nano Laboratory
22--2. Passive Isolation Systems2. Passive Isolation Systems In
a passive isolation systems, no controls are needed for the iIn a
passive isolation systems, no controls are needed for the
isolator.solator.
The design consists of a simple natural rubber material, or a
coThe design consists of a simple natural rubber material, or a
comparablemparable
synthetic material.synthetic material.
This is the cheapest option because it is the simplest design
anThis is the cheapest option because it is the simplest design and
thed the
easiest to manufacture.easiest to manufacture.
The durability of the isolator can be improved by stiffening
theThe durability of the isolator can be improved by stiffening the
isolator.isolator.
This can be done simply by increasing theThis can be done simply
by increasing the durometerdurometerhardness of thehardness of
the
material or by changing material.material or by changing
material.
However, as the stiffness of the isolators is increased, the
noiHowever, as the stiffness of the isolators is increased, the
noisese
performance of the compressor will be compromised, because a
stiperformance of the compressor will be compromised, because a
stifferffer
isolator will generally transmit higher frequency
vibration.isolator will generally transmit higher frequency
vibration.
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
10/115Smart Structures Bio-Nano Laboratory
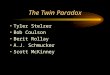
22--3. Passive Isolation Systems3. Passive Isolation Systems
FIGURE 2.1. Design of a passive isolator.FIGURE 2.1. Design of a
passive isolator.
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
11/115Smart Structures Bio-Nano Laboratory
22--4. Passive Isolation Systems4. Passive Isolation Systems AA
hydromounthydromount is a more complex passive isolator. A fluid
isis a more complex passive isolator. A fluid is
incorporated into the design to provide extra
damping.incorporated into the design to provide extra damping.
Fluid is forced through an orifice within the isolator. The
resFluid is forced through an orifice within the isolator. The
resistanceistanceprovided by the orifice provides damping for the
isolated compreprovided by the orifice provides damping for the
isolated compressor.ssor.
The increased damping allows the isolator to be designed of a
leThe increased damping allows the isolator to be designed of a
less stiffss stiff
material. The combination of reduced stiffness and increased
damaterial. The combination of reduced stiffness and increased
dampingmpingallows theallows the hydromounthydromount to provide
better isolation without compromisingto provide better isolation
without compromising
durability.durability.
However, the added damping increases the transmitted force,
andHowever, the added damping increases the transmitted force,
and
therefore, the system is not an optimal solution.therefore, the
system is not an optimal solution.
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
12/115Smart Structures Bio-Nano Laboratory
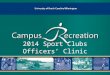
22--5. Passive Isolation Systems5. Passive Isolation Systems
FIGURE 2.2. Design of a passiveFIGURE 2.2. Design of a passive
hydromounthydromount..
FLUID
FLUID
ORIFICE ORIFICE
MOUNTING
LOCATION
MOUNTING
LOCATION
ELASTOMERSURROUNDING
FLUID
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
13/115Smart Structures Bio-Nano Laboratory
22--6. Passive Isolation Systems6. Passive Isolation Systems A
transmissibility model was developed to show some of theseA
transmissibility model was developed to show some of these
concepts. It shows the compressor mounted to its structural
basconcepts. It shows the compressor mounted to its structural
basee
through an isolator that has only passive stiffness and
passivethrough an isolator that has only passive stiffness and
passive dampingdamping
components (k and c, respectively).components (k and c,
respectively).
FIGURE 2.3. Transmissibility model.FIGURE 2.3. Transmissibility
model.
c
Compressor
x
y
k
Base
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
14/115Smart Structures Bio-Nano Laboratory
22--7. Passive Isolation Systems7. Passive Isolation Systems The
transmissibility model is used to create a ratio between forThe
transmissibility model is used to create a ratio between force
seence seen
in the compressor due to rotation unbalance and force
transmittein the compressor due to rotation unbalance and force
transmittedd
through the isolator into the base.through the isolator into the
base.
The ratio is developed by summing the forces in the model.The
ratio is developed by summing the forces in the model.
(2.1)(2.1)
Assuming x and y are sinusoidal displacements for the
compressorAssuming x and y are sinusoidal displacements for the
compressorandand
base, respectively, velocity and acceleration can be
calculatedbase, respectively, velocity and acceleration can be
calculated by takingby taking
the derivative of the displacement. The result is:the derivative
of the displacement. The result is:
(2.2)(2.2)
where X and Y are amplitudes of vibration andwhere X and Y are
amplitudes of vibration and is the rotational speedis the
rotational speed
of the compressor.of the compressor.
( )
+= =+ xycxykxmF &&
cXjcYjkXkYm += 2
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
15/115Smart Structures Bio-Nano Laboratory
22--8. Passive Isolation Systems8. Passive Isolation Systems The
equation is rewritten as:The equation is rewritten as:
(2.3)(2.3)
Solving, the amplitude of the mass, X, divided by the
amplitudeSolving, the amplitude of the mass, X, divided by the
amplitude of theof the
base, Y, gives the transmissibility.base, Y, gives the
transmissibility.
(2.4)(2.4)
YcjkXcjmk
+=+ 2
cjmkcjk
YX
++
= 2
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
16/115Smart Structures Bio-Nano Laboratory
22--9. Passive Isolation Systems9. Passive Isolation Systems
FIGURE 2.4. Transmissibility as a function of the stiffness
ofFIGURE 2.4. Transmissibility as a function of the stiffness of
the isolator.the isolator.
XX
YY
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
17/115Smart Structures Bio-Nano Laboratory
22--10. Passive Isolation Systems10. Passive Isolation
Systems
FIGURE 2.5. Transmissibility as a function of the damping of
thFIGURE 2.5. Transmissibility as a function of the damping of the
isolator.e isolator.
XX
YY
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
18/115Smart Structures Bio-Nano Laboratory
22--11. Semi11. Semi--Active Isolation SystemsActive Isolation
Systems A semiA semi--active isolator can only remove energy from
the system.active isolator can only remove energy from the
system.
However, a semiHowever, a semi--active isolator is capable of
changing one or moreactive isolator is capable of changing one or
more
properties in response to a command signal.properties in
response to a command signal.
The ability to change system properties gives the system
designeThe ability to change system properties gives the system
designer morer more
control while using very little input power.control while using
very little input power.
An example of a semiAn example of a semi--active system is a
shock absorber with a variableactive system is a shock absorber
with a variable
orifice that allows the damping coefficient to be changed as
neeorifice that allows the damping coefficient to be changed as
needed.ded.
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
19/115
Smart Structures Bio-Nano Laboratory
22
--12. Active Isolation Systems12. Active Isolation Systems
Active isolation systems can be controlled by computers
throughActive isolation systems can be controlled by computers
through inputinput
signals from sensors.signals from sensors.
Unlike passive and semiUnlike passive and semi--active systems,
active systems are able to addactive systems, active systems are
able to addenergy to the system.energy to the system.
The goal of active isolation is to provide energy equal in
magniThe goal of active isolation is to provide energy equal in
magnitude andtude and
opposite in phase of the vibration input. In doing so, an
activopposite in phase of the vibration input. In doing so, an
active isolatione isolationsystem can improve noise performance and
durability performance.system can improve noise performance and
durability performance.
An example of an active system is an electromechanical
actuatorAn example of an active system is an electromechanical
actuator
arranged to generate force by responding to a velocity or
displaarranged to generate force by responding to a velocity or
displacementcement
feedback signal.feedback signal.
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
20/115
Smart Structures Bio-Nano Laboratory
22
--13. Active Isolation Systems13. Active Isolation Systems
However, active systems are very design intensive and require
seHowever, active systems are very design intensive and require
sensorsnsors
and processors to provide real time data to the isolator.and
processors to provide real time data to the isolator.
Large amounts of power are also required to operate an active
isLarge amounts of power are also required to operate an active
isolator.olator.
These necessary features of the active isolation system make
itThese necessary features of the active isolation system make it
the mostthe most
expensive isolation design.expensive isolation design.
Because of the expense, active isolation systems are very
uncommBecause of the expense, active isolation systems are very
uncommon.on.
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
21/115
Smart Structures Bio-Nano Laboratory
22
--14. Smart Materials As Actuators14. Smart Materials As
Actuators
Several different materials have been developed to allow
designeSeveral different materials have been developed to allow
designers tors to
use them as actuators in a system.use them as actuators in a
system.
Piezoelectric materials experience a dimensional change when
anPiezoelectric materials experience a dimensional change when
anelectrical voltage is applied to them.electrical voltage is
applied to them.
Conversely, these materials produce an electrical charge when
aConversely, these materials produce an electrical charge when
a
pressure is applied to them.pressure is applied to them.
This rare property allows the piezoelectric material to be
usedThis rare property allows the piezoelectric material to be used
as aas a
sensor or an actuator.sensor or an actuator.
The best known such material is leadThe best known such material
is lead--zirconatezirconate--titanatetitanate (PZT).(PZT).
However, the use of PZT for vibration isolation is limited due
tHowever, the use of PZT for vibration isolation is limited due to
the smallo the small
strain capability of the material.strain capability of the
material.
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
22/115
Smart Structures Bio-Nano Laboratory
22
--15. Smart Materials As Actuators15. Smart Materials As
Actuators
Shape memory alloy (SMA) material possesses the interesting
propShape memory alloy (SMA) material possesses the interesting
propertyerty
in that a metal remembers its original shape and size and chanin
that a metal remembers its original shape and size and
changesges
back to that shape and size at a characteristic
transformationback to that shape and size at a characteristic
transformation
temperature.temperature.
Materials that exhibit these characteristics include:
goldMaterials that exhibit these characteristics include:
gold--cadmium,cadmium,
brass, and nickelbrass, and nickel--titanium.titanium.
The alloys inherent properties have become very useful to the
meThe alloys inherent properties have become very useful to the
medicaldical
field.field.
TheThe SMAsSMAs ability to generate high forces at low frequency
allows theability to generate high forces at low frequency allows
the
material to be used as an actuator.material to be used as an
actuator.
However, the use of SMA in engineering applications has been
limHowever, the use of SMA in engineering applications has been
limitedited
because of slow response time and due to the limited
temperaturebecause of slow response time and due to the limited
temperature rangerange
in which it can be effective.in which it can be effective.
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
23/115
Smart Structures Bio-Nano Laboratory
33
--1. MODELING OF RHEOLOGIC FLUIDS1. MODELING OF RHEOLOGIC
FLUIDS
AA rheologicrheologic fluid changes properties as an external
field is applied.fluid changes properties as an external field is
applied.
These fluids can be used as controllable energy
dissipaters.These fluids can be used as controllable energy
dissipaters.
The control used is semiThe control used is semi--active, and
with this approach small controlactive, and with this approach
small control
energy can produce large actuation forces.energy can produce
large actuation forces.
The following characteristics of aThe following characteristics
of a rheologicrheologic fluid will be discussed:fluid will be
discussed:
1.1. ER/MR fluid isolator systems.ER/MR fluid isolator
systems.
2.2. Bingham plastic model of MR fluids.Bingham plastic model of
MR fluids.
3.3. MR fluid isolator systems.MR fluid isolator systems.
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
24/115
Smart Structures Bio-Nano Laboratory
33
--2. ER/MR Fluid Isolator Systems2. ER/MR Fluid Isolator
Systems
A great deal of research has been conducted on semiA great deal
of research has been conducted on semi--active controlactive
control
to look for a compromise between passive and active isolationto
look for a compromise between passive and active isolation
systems.systems.
These systems can be used for vibration suppression or
isolationThese systems can be used for vibration suppression or
isolation
and require minimal power as compared to an active system.and
require minimal power as compared to an active system.
With a semi active system, noise performance can be improvedWith
a semi active system, noise performance can be improvedwithout
dramatically hindering durability capabilities.without dramatically
hindering durability capabilities.
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
25/115
Smart Structures Bio-Nano Laboratory
33
--3. ER/MR Fluid Isolator Systems3. ER/MR Fluid Isolator
Systems
Extensive studies have been conducted on ElectroExtensive
studies have been conducted on Electro--RheologicRheologic
(ER)(ER)
and Magnetoand Magneto--RheologicRheologic (MR) fluids for use
in semi(MR) fluids for use in semi--active systemsactive
systems
that are used for vibration suppression.that are used for
vibration suppression.
The two materials were discovered in the late 1940s.The two
materials were discovered in the late 1940s.
JackJack RabinowRabinow reported on a MR fluid experimental
program at thereported on a MR fluid experimental program at
the
U.S. National Bureau of Standards for the Armys Chief ofU.S.
National Bureau of Standards for the Armys Chief ofOrdinance in
1948.Ordinance in 1948.
Winslow published his account of a lengthy research
programWinslow published his account of a lengthy research
program
investigating the properties and applications of ER fluid in
194investigating the properties and applications of ER fluid in
1949.9.
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
26/115
Smart Structures Bio-Nano Laboratory
33
--4. ER/MR Fluid Isolator Systems4. ER/MR Fluid Isolator
Systems
Initial testing with ER fluids showed problems with the fluid,
nInitial testing with ER fluids showed problems with the fluid,
namelyamely
operating temperature limitations and storage stability
problemsoperating temperature limitations and storage stability
problems..
Over time improvements have been made, but new problems haveOver
time improvements have been made, but new problems
havearisen.arisen.
Today, ER fluids are considered to have low shear strengths.
ThToday, ER fluids are considered to have low shear strengths.
Thee
fluid provides shear strengths that are two to ten times lower
tfluid provides shear strengths that are two to ten times lower
thanhanneeded for many practical applications.needed for many
practical applications.
High voltages are required to operate ER fluids.High voltages
are required to operate ER fluids.
There is a lack of universal fluid for ER technology.There is a
lack of universal fluid for ER technology.
Because of these limitations, commercial success of ER fluids
haBecause of these limitations, commercial success of ER fluids
hass
been elusive.been elusive.
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
27/115
Smart Structures Bio-Nano Laboratory
33--5. ER/MR Fluid Isolator Systems5. ER/MR Fluid Isolator
Systems
MR fluids are more practical.MR fluids are more practical.
When compared to ER fluids, MR fluids offer higher order
yieldWhen compared to ER fluids, MR fluids offer higher order
yield
stresses and provide a better operating temperature
range.stresses and provide a better operating temperature
range.
At the same time, companies such as Lord Corporation haveAt the
same time, companies such as Lord Corporation have
commercial MR products.commercial MR products.
Because of the advantages of MR fluid over ER fluid, MR fluid
wiBecause of the advantages of MR fluid over ER fluid, MR fluid
willll
be considered from this point.be considered from this point.
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
28/115
Smart Structures Bio-Nano Laboratory
33--6. Bingham Plastic Model Of MR Fluids6. Bingham Plastic
Model Of MR Fluids
MR fluids are traditionally modeled as a Bingham plastic,
whereMR fluids are traditionally modeled as a Bingham plastic,
where
there is a passive and active component to the fluid. Wherethere
is a passive and active component to the fluid. Where
(3.1)(3.1)
is the equation used to model the fluid.is the equation used to
model the fluid.
The passive component is a function of the fluid rThe passive
component is a function of the fluid resistanceesistancefrom the
viscosity, which is a property of the fluid and cannotfrom the
viscosity, which is a property of the fluid and cannot bebe
controlled.controlled.
The active component is derived from the yieldThe active
component is derived from the yield stress,stress,
which changes proportionally with the applied magnetic
field.which changes proportionally with the applied magnetic
field.
+=+=
yMRyxMRcyieldfMRF
R
c
yieldf
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
29/115
Smart Structures Bio-Nano Laboratory
33--7. Bingham Plastic Model Of MR Fluids7. Bingham Plastic
Model Of MR Fluids
Initial research showed the passive resistance could be
modeledInitial research showed the passive resistance could be
modeled asas
a constant.a constant.
Figure 3.1. Shear stress versus shear strain rate for aFigure
3.1. Shear stress versus shear strain rate for a
Bingham plastic material.Bingham plastic material.
Fo=0
F1
F2
F3
INCREASING
FIELD
STRENGTH
y(F1)
y(F2)
y(F3)
0 0
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
30/115
Smart Structures Bio-Nano Laboratory
33--8. Bingham Plastic Model Of MR Fluids8. Bingham Plastic
Model Of MR Fluids
However, further investigation showed that viscosity is a
functiHowever, further investigation showed that viscosity is a
function ofon of
shear rate, with the viscosity increasing dramatically at
lowershear rate, with the viscosity increasing dramatically at
lower shearshear
rates.rates.
Figure 3.2. Viscosity of a MR fluid is a function of shear
rateFigure 3.2. Viscosity of a MR fluid is a function of shear
rate..
0 50 100 150-1
0
1
2
3
4
5MR Fluid Characteristics - MRF 132LD - Lord Corporation
Shear Rate (1/s)
Viscosity(Pas)
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
31/115
Smart Structures Bio-Nano Laboratory
33--9. Bingham Plastic Model Of MR Fluids9. Bingham Plastic
Model Of MR Fluids
The active component is derived from resistance due to yieldThe
active component is derived from resistance due to yield
stress, which is a function of the magnetic field created by a
cstress, which is a function of the magnetic field created by a
coiloil
that is incorporated into the isolator.that is incorporated into
the isolator.
Figure 3.3. Yield stress as a function of magnetic field.Figure
3.3. Yield stress as a function of magnetic field.
0 0.5 1 1.5 2 2.5 3
x 105
0
1
2
3
4
5x 10
H (Amp/m)
Y
ield
S
tress
(P
a)
MR Fluid Characteristics -- MRF 132 LD - Lord Corporation
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
32/115
Smart Structures Bio-Nano Laboratory
33--10. MR Fluid Working Modes10. MR Fluid Working Modes
MR fluid has three different types of working modes, depending
oMR fluid has three different types of working modes, depending
onn
how the fluid is loaded. The modes include:how the fluid is
loaded. The modes include:
1.1. Shear mode.Shear mode.2.2. Flow mode.Flow mode.
3.3. Squeeze mode.Squeeze mode.
Different equations are used to calculate resistive force for
eaDifferent equations are used to calculate resistive force for
each ofch ofthe different modes.the different modes.
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
33/115
Smart Structures Bio-Nano Laboratory
33--11. MR Fluid Working Modes11. MR Fluid Working Modes
Figure 3.4. Three working modes of a MR fluid (a) shear, (b)
flFigure 3.4. Three working modes of a MR fluid (a) shear, (b)
flow,ow,
and (c) squeeze. B is the magnetic flux direction.and (c)
squeeze. B is the magnetic flux direction.
B
Flux Guide
Moving Surface
B
TensionCompression
COIL
Flux Guide
Moving Surface
v
F
COIL
Flux Guide
Bp1 p2
COIL
(a) (b) (c)
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
34/115
Smart Structures Bio-Nano Laboratory
33--12. MR Fluid Working Modes12. MR Fluid Working Modes
The shear mode works when one surface moves through the fluid
wiThe shear mode works when one surface moves through the fluid
withth
respect to another surface.respect to another surface.
The magnetic field is perpendicular to the direction of
motion.The magnetic field is perpendicular to the direction of
motion.
A MR based clutch is a good example of working the fluid in theA
MR based clutch is a good example of working the fluid in the
shearshear
mode.mode.
The equation corresponding to the shear mode is:The equation
corresponding to the shear mode is:
(3.2)(3.2)
where f is the resultant force based on the plate area, and S,
Lwhere f is the resultant force based on the plate area, and S, L,
b, and h, b, and hare the surface area, length, width, and height,
respectively.are the surface area, length, width, and height,
respectively. Is theIs the
viscosity of the fluid and is the yield strength of thviscosity
of the fluid and is the yield strength of the fluid.e fluid.
yLbhSLbf +=
y
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
35/115
Smart Structures Bio-Nano Laboratory
33--13. MR Fluid Working Modes13. MR Fluid Working Modes
The flow mode is characterized by two static flux guides with
thThe flow mode is characterized by two static flux guides with
thee
magnetic field normal to the flow.magnetic field normal to the
flow.
The magnetic field can be used to control flow resistance and
prThe magnetic field can be used to control flow resistance and
pressureessuredrop across the valve.drop across the valve.
Automotive shock absorbers work in the flow mode.Automotive
shock absorbers work in the flow mode.
The equation corresponding to the flow mode is:The equation
corresponding to the flow mode is:
(3.3)(3.3)
where Q is the flow rate of the fluid.where Q is the flow rate
of the fluid.
yhL
bh
QLHFER
PHF
PP 33
12,,0 +=+=
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
36/115
Smart Structures Bio-Nano Laboratory
33--14. MR Fluid Working Modes14. MR Fluid Working Modes
The squeeze mode works when two parallel surfaces are used toThe
squeeze mode works when two parallel surfaces are used to
compress the fluid.compress the fluid.
The magnetic field is parallel to the motion of the surfaces.The
magnetic field is parallel to the motion of the surfaces.
The magnetic flux density can be used to adjust the normal
forceThe magnetic flux density can be used to adjust the normal
force toto
resist the motion.resist the motion.
The squeeze mode has been shown to damp vibrations with high
forThe squeeze mode has been shown to damp vibrations with high
forcesces
and low amplitudes.and low amplitudes.
The equation corresponding to the squeeze mode is:The equation
corresponding to the squeeze mode is:
(3.4)(3.4))()(
0
30
2x
thh
aF
=
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
37/115
Smart Structures Bio-Nano Laboratory
44--1. MODELING THE ISOLATION SYSTEM1. MODELING THE ISOLATION
SYSTEM
A single degree of freedom model is used to model the
compressorA single degree of freedom model is used to model the
compressor
system.system.
The model simulates a compressor mounted to a vehicle body.The
model simulates a compressor mounted to a vehicle body.
To simplify the model, the motion of the vehicle body is
modeledTo simplify the model, the motion of the vehicle body is
modeled as a 1as a 1
Hz sine wave. This simulates the vehicle body bouncing at the
nHz sine wave. This simulates the vehicle body bouncing at the
naturalatural
frequency of the suspension system.frequency of the suspension
system.
Two seconds of data are simulated.Two seconds of data are
simulated.
Halfway through the model, a speed bump is introduced. The
speeHalfway through the model, a speed bump is introduced. The
speedd
bump is a severe test of the isolators durability.bump is a
severe test of the isolators durability.
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
38/115
Smart Structures Bio-Nano Laboratory
44--2. MODELING THE ISOLATION SYSTEM2. MODELING THE ISOLATION
SYSTEM
Two models are created. One for the passive system and the
otheTwo models are created. One for the passive system and the
other forr for
the semithe semi--active system.active system.
The following discussion is included:The following discussion is
included:
1.1. Simulation of the passive isolator.Simulation of the
passive isolator.
2.2. Simulation of the semiSimulation of the semi--active
isolator.active isolator.
3.3. NewmarkNewmark--Beta explicit time integration.Beta
explicit time integration.4.4. Filter design.Filter design.
5.5. Control law design.Control law design.
6.6. System inputs.System inputs.
7.7. System outputs.System outputs.
8.8. Detailed design of the MR isolator.Detailed design of the
MR isolator.
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
39/115
Smart Structures Bio-Nano Laboratory
44--3. Simulation Of The Passive Isolator3. Simulation Of The
Passive Isolator
The passive model was used to create baseline performance
standaThe passive model was used to create baseline performance
standardsrds
for the existing isolator, and to show trend lines when
stiffnesfor the existing isolator, and to show trend lines when
stiffness ands and
damping parameters are changed.damping parameters are
changed.
The passive model can be seen in Figure 4.1. The model shows
thThe passive model can be seen in Figure 4.1. The model shows
thee
compressor mounted to the vehicle body through an isolator
thatcompressor mounted to the vehicle body through an isolator that
hashas
only passive stiffness and passive damping components (only
passive stiffness and passive damping components (kkpassivepassive
andand
ccpassivepassive, respectively)., respectively).
1.1. The free body diagram for the passive system can be seen in
FiguThe free body diagram for the passive system can be seen in
Figure 4.2.re 4.2.
This diagram helps show how the equation of motion and the
equatThis diagram helps show how the equation of motion and the
equationion
for transmitted force are developed.for transmitted force are
developed.
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
40/115
Smart Structures Bio-Nano Laboratory
44--4. Simulation Of The Passive Isolator4. Simulation Of The
Passive Isolator
Figure 4.1. Passive model.Figure 4.1. Passive model. Figure 4.2.
Passive free body diagram.Figure 4.2. Passive free body
diagram.
cPASSIVEkPASSIVE
VEHICLE BODY
COMPRESSOR
x(t)
y(t)
F COMPRESSOR
COMPRESSOR
F COMPRESSOR ASSUME x>y
VEHICLE BODY
)( yxkPASSIVE )(
yxcPASSIVE
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
41/115
Smart Structures Bio-Nano Laboratory
44--5. Simulation Of The Passive Isolator5. Simulation Of The
Passive Isolator
The equation of motion is created by summing the forces seen
inThe equation of motion is created by summing the forces seen in
thethe
free body diagram, given by:free body diagram, given by:
(4.1)(4.1)
This summation of forces is:This summation of forces is:
(4.2)(4.2)
Rearranging gives:Rearranging gives:
(4.3)(4.3)
The acceleration of the compressor,The acceleration of the
compressor, , is then calculated as:, is then calculated as:
(4.4)(4.4)
=+
xmF
( )COMPRESSOR
FyxPASSIVEcyx
PASSIVEkxm +=
COMPRESSORFx
PASSIVEcy
PASSIVEcx
PASSIVEky
PASSIVEkxm ++=
( )
++=
COMPRESSOR
Fxy
PASSIVE
cxy
PASSIVE
k
m
x1
x
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
42/115
Smart Structures Bio-Nano Laboratory
44--6. Simulation Of The Passive Isolator6. Simulation Of The
Passive Isolator
The force transmitted into the vehicle body is also seen in
theThe force transmitted into the vehicle body is also seen in the
free bodyfree body
diagram. A transmitted force is considered any force created
frdiagram. A transmitted force is considered any force created from
theom the
relative motion between the vehicle body and the compressor
thatrelative motion between the vehicle body and the compressor
that actsacts
upon the vehicle body.upon the vehicle body.
The transmitted force is computed using:The transmitted force is
computed using:
(4.5)(4.5)
Including the spring and damper force in (4.5) gives:Including
the spring and damper force in (4.5) gives:
(4.6)(4.6)
=+TRANS
FF
( )
+= =+ yxPASSIVE
cyx
PASSIVE
k
TRANS
FF
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
43/115
Smart Structures Bio-Nano Laboratory
44--7. Simulation Of The Passive Isolator7. Simulation Of The
Passive Isolator
The compressor assembly consists of three baseline isolators
andThe compressor assembly consists of three baseline isolators and
thethe
compressor.compressor.
Each isolator is a simple passive isolator with the following
prEach isolator is a simple passive isolator with the following
properties:operties:
Synthetic rubber material of 60Synthetic rubber material of 60
durometerdurometer..
Rated to withstand temperatures up to 110 C.Rated to withstand
temperatures up to 110 C.
Measured stiffness of k=50,000 N/m and damping ratio of
zeta=0.1Measured stiffness of k=50,000 N/m and damping ratio of
zeta=0.1.. Height of 20 mm, outer diameter of 14 mm, and mass of
6.8 grams.Height of 20 mm, outer diameter of 14 mm, and mass of 6.8
grams.
The compressor has the following properties:The compressor has
the following properties:
230 mm long, 180 mm wide, and 110 mm tall.230 mm long, 180 mm
wide, and 110 mm tall. Mass of 3 kg (6.6 lbs.)Mass of 3 kg (6.6
lbs.)
For the model, it was assumed that oneFor the model, it was
assumed that one--third of the mass (1 kg) was onthird of the mass
(1 kg) was on
each isolator.each isolator.
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
44/115
Smart Structures Bio-Nano Laboratory
44--8. Simulation Of The Semi8. Simulation Of The Semi--Active
IsolatorActive Isolator
The semiThe semi--active isolator was modeled to replace the
passive isolator.active isolator was modeled to replace the passive
isolator.
The fluid was modeled as a Bingham plastic, where there is a
pasThe fluid was modeled as a Bingham plastic, where there is a
passivesive
and active component to the fluid.and active component to the
fluid.
The equations used to model the fluid are as follows:The
equations used to model the fluid are as follows:
(4.7)(4.7)
(4.8)(4.8)
+= yxMRcyieldfMRF
+= yR
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
45/115
Smart Structures Bio-Nano Laboratory
44--9. Simulation Of The Semi9. Simulation Of The Semi--Active
IsolatorActive Isolator
TheThe ccMRMR component of the fluid is the passive part of the
fluid.component of the fluid is the passive part of the fluid.
It is a function of the viscosity of the fluid, , the shear raIt
is a function of the viscosity of the fluid, , the shear rate of
the fluid, ,te of the fluid, ,
and the geometry of the flow path.and the geometry of the flow
path.
The shear rate of the fluid is a function of the relative
velociThe shear rate of the fluid is a function of the relative
velocity and thety and the
fluid gap width. The viscosity of the fluid is a function of
thfluid gap width. The viscosity of the fluid is a function of the
shear rate.e shear rate.
TheThe ffyieldyield is the active isolation component of the MR
fluid.is the active isolation component of the MR fluid.
It is a function of the yield strength of the fluid, .It is a
function of the yield strength of the fluid, .
The yield strength of the MR fluid is related to the
resistanceThe yield strength of the MR fluid is related to the
resistance forceforcethrough the gap area of the isolators flow
channels and the strthrough the gap area of the isolators flow
channels and the strength ofength of
the magnetic field surrounding it.the magnetic field surrounding
it.
y
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
46/115
Smart Structures Bio-Nano Laboratory
44--10. Simulation Of The Semi10. Simulation Of The Semi--Active
IsolatorActive Isolator
Figure 4.3. SemiFigure 4.3. Semi--active model of the MR
isolator.active model of the MR isolator.
Processor With
Control LawControl
Filter
IntegratorVehicle Body
Compressor
Amplifier For
MR Coil
MRcpassive
kpassive
y(t)
x(t)
Fcomponent
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
47/115
Smart Structures Bio-Nano Laboratory
44--11. Simulation Of The Semi11. Simulation Of The Semi--Active
IsolatorActive Isolator
Figure 4.4. SemiFigure 4.4. Semi--active free body
diagram.active free body diagram.
COMPRESSOR
F COMPRESSOR ASSUME x>y
VEHICLE BODY
FMR)( yxkPASSIVE )(
yxcPASSIVE
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
48/115
Smart Structures Bio-Nano Laboratory
44--12. Simulation Of The Semi12. Simulation Of The Semi--Active
IsolatorActive Isolator
The equation of motion is created by summing the forces seen
inThe equation of motion is created by summing the forces seen in
thethe
free body diagram, given by:free body diagram, given by:
(4.9)(4.9)
However, in the semiHowever, in the semi--active system, forces
created by the MR fluid areactive system, forces created by the MR
fluid are
included in the equation of motion.included in the equation of
motion.
(4.10)(4.10)
Rearranging gives:Rearranging gives:
(4.11)(4.11)
The acceleration of the compressor, , is then calculated asThe
acceleration of the compressor, , is then calculated as::
(4.12)(4.12)
=+
xmF
( )COMPRESSOR
FMR
FyxPASSIVEcyx
PASSIVEkxmF += =+
COMPRESSORFMRFxPASSIVEcyPASSIVEcxPASSIVEkyPASSIVEkxm ++=
( )
++=
COMPRESSORF
MRFxy
PASSIVEcxy
PASSIVEk
mx
1
x
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
49/115
Smart Structures Bio-Nano Laboratory
44--13. Simulation Of The Semi13. Simulation Of The Semi--Active
IsolatorActive Isolator
The transmitted force equation for the semiThe transmitted force
equation for the semi--active system is very similaractive system
is very similar
to the passive equation.to the passive equation.
The transmitted force is computed using:The transmitted force is
computed using:
(4.13)(4.13)
But once again, the forces generated by the MR fluid need to
beBut once again, the forces generated by the MR fluid need to
beconsidered.considered.
(4.14)(4.14)
It is important to note that the MR force is transmitted into
thIt is important to note that the MR force is transmitted into the
vehiclee vehiclebody. For this reason, the control of the MR fluid
is very impobody. For this reason, the control of the MR fluid is
very important.rtant.
=+ TRANSFF
( )MR
FyxPASSIVEcyx
PASSIVEk
TRANSFF ++= =+
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
50/115
Smart Structures Bio-Nano Laboratory
44--14. Simulation Of The Semi14. Simulation Of The Semi--Active
IsolatorActive Isolator
To generate the passive and active force components from the
MRTo generate the passive and active force components from the MR
fluid,fluid,
the pressure drop through the isolator must be analyzed.the
pressure drop through the isolator must be analyzed.
(4.15)(4.15)
From (4.15), the force components can be derived using the
areaFrom (4.15), the force components can be derived using the area
of theof the
flow channel,flow channel, AAgapgap, and the area of the
isolator plunger, A, and the area of the isolator plunger,
Aii..
The derivation of the active component follows:The derivation of
the active component follows:
(4.16)(4.16)
It is important to note that the active component of the MR
fluiIt is important to note that the active component of the MR
fluid isd is
directly proportional to the yield stress of the fluid.directly
proportional to the yield stress of the fluid.
3123 bhQLyhLP
+=
yhiroryhgap
Ayield
f
== 2233
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
51/115
Smart Structures Bio-Nano Laboratory
44--15. Simulation Of The Semi15. Simulation Of The Semi--Active
IsolatorActive Isolator
The derivation of the passive component is a little more
complicThe derivation of the passive component is a little more
complicated.ated.
The passive force is related to the viscosity and flow rate.The
passive force is related to the viscosity and flow rate.
(4.17)(4.17)
However, the flow rate is a function of relative
velocity.However, the flow rate is a function of relative
velocity.
(4.18)(4.18)
When the velocity is factored out, the passive component is
seenWhen the velocity is factored out, the passive component is
seen asas
being proportional to the viscosity of the fluid and the
geometrbeing proportional to the viscosity of the fluid and the
geometry of they of the
isolator.isolator.
(4.19)(4.19)
312 bhQLyxMRc =
3
22212
312
312
bh
Lyxi
r
iror
bh
Lyxi
A
gapAbh
QLgapAyxMR
c
=
==
322212
3
22212
bh
Li
rorir
bh
Li
r
irorMR
c
==
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
52/115
Smart Structures Bio-Nano Laboratory
44--16. Simulation Of The Semi16. Simulation Of The Semi--Active
IsolatorActive Isolator Simplifying, the equation for the passive
component of the MR flSimplifying, the equation for the passive
component of the MR fluid isuid is
found.found.
(4.20)(4.20)
Combining the passive rubber components and the MR components
ofCombining the passive rubber components and the MR components
of
the isolator, the MR based isolator is modeled as follows:the
isolator, the MR based isolator is modeled as follows:
(4.21)(4.21)
312 bhgapAiAMRc
=
( ) ( )yield
fyxMRccyxk
IsolatorF +++=
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
53/115
Smart Structures Bio-Nano Laboratory
44--17. Simulation Of The Semi17. Simulation Of The Semi--Active
IsolatorActive Isolator The control of theThe control of the
ffyieldyield component is very important.component is very
important.
The goal of theThe goal of the ffyieldyield term is to control
road input frequencies withoutterm is to control road input
frequencies without
transmitting higher frequencies created by the
compressor.transmitting higher frequencies created by the
compressor.
This done by controlling the active MR component to model the
paThis done by controlling the active MR component to model the
passivessive
damping provided by the isolator, but using a low pass filter
todamping provided by the isolator, but using a low pass filter to
eliminateeliminate
the higher frequencies created by the compressor.the higher
frequencies created by the compressor.
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
54/115
Smart Structures Bio-Nano Laboratory
44--18.18. NewmarkNewmark--Beta Explicit Time Integration
MethodBeta Explicit Time Integration Method This is an integration
method with force balance iteration usedThis is an integration
method with force balance iteration used to moveto move
from one time point to the next because the equations of the
isofrom one time point to the next because the equations of the
isolatorlator
system are nonlinear and cannot be solved in closed form.system
are nonlinear and cannot be solved in closed form.
The integration method requires initial displacement,
velocity,The integration method requires initial displacement,
velocity, andand
acceleration components. It then calculates displacement and
veacceleration components. It then calculates displacement and
velocitylocity
for the next time point, and inputs them into the equation of
mofor the next time point, and inputs them into the equation of
motion.tion.
Ten iterations are run for each point, allowing the
calculationsTen iterations are run for each point, allowing the
calculations toto
converge.converge.
This is an accurate, flexible, and simple method for solving
nonThis is an accurate, flexible, and simple method for solving
nonlinearlinear
equations. However, a small time step is required.equations.
However, a small time step is required.
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
55/115
Smart Structures Bio-Nano Laboratory
44
--19. Filter Design19. Filter Design
The lowThe low--pass filter was designed as a second order
Butterworth filter.pass filter was designed as a second order
Butterworth filter.
The filter was designed with a cutoff frequency of 30 Hz in
ordeThe filter was designed with a cutoff frequency of 30 Hz in
order to turnr to turn
off the actuator at 50 Hz so the compressor vibration is not
troff the actuator at 50 Hz so the compressor vibration is not
transmittedansmittedto the automobile frame.to the automobile
frame.
Figure 4.5 shows how the filter introduces amplitude
distortionFigure 4.5 shows how the filter introduces amplitude
distortion based onbased on
frequency.frequency.
It also shows how the filter introduces phase lag into the
respoIt also shows how the filter introduces phase lag into the
response of thense of the
active MR component.active MR component.
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
56/115
Smart Structures Bio-Nano Laboratory
44--20. Filter Design20. Filter Design
Figure 4.5. Characteristics of a second order Butterworth
filteFigure 4.5. Characteristics of a second order Butterworth
filter.r.
0 20 40 60 80 100 120 140 160 180 2000
0.2
0.4
0.6
0.8
1
Second Order Butterworth Low Pass Filter Properties -- 30 Hz
Frequency (Hz)
Magn
itu
de
0 20 40 60 80 100 120 140 160 180 200-200
-150
-100
-50
0
Frequency (Hz)
P
hase
(deg
)
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
57/115
Smart Structures Bio-Nano Laboratory
44
--21. Filter Design21. Filter Design
The following shows how the lowThe following shows how the
low--pass filter works:pass filter works:
The active variable v is set equal to the relative velocity
betwThe active variable v is set equal to the relative velocity
between theeen the
compressor and the structural base.compressor and the structural
base.
It is then filtered, producing a variable z with the
compressorIt is then filtered, producing a variable z with the
compressor excitationexcitation
content removed.content removed.
The variable z is then scaled to produce the yield stress of
theThe variable z is then scaled to produce the yield stress of the
fluid.fluid.
v = relative velocityv = relative velocity vv FilterFilter zz
yield stress=z*scaleyield stress=z*scale
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
58/115
Smart Structures Bio-Nano Laboratory
44
--22. Filter Design22. Filter Design
The variable v is exactly in phase with the passive isolation
foThe variable v is exactly in phase with the passive isolation
force.rce.
If the filter was a perfect filter, there would be no phase
lagIf the filter was a perfect filter, there would be no phase lag
in variable z,in variable z,
and it too would be exactly in phase with the passive
isolationand it too would be exactly in phase with the passive
isolation force.force.
However, as seen in Figure 4.6, when the vehicle hits the
bump,However, as seen in Figure 4.6, when the vehicle hits the
bump, thethe
response of the active component lags behind the passive
componeresponse of the active component lags behind the passive
componentnt
by roughly ninety degrees.by roughly ninety degrees.
Because the active component lags, it cannot be as effective
asBecause the active component lags, it cannot be as effective
as
possible.possible.
If the amplitude of the active MR component is scaled too
high,If the amplitude of the active MR component is scaled too
high, thisthis
phase lag can cause a phase lag induced instability in the
modelphase lag can cause a phase lag induced instability in the
model..
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
59/115
Smart Structures Bio-Nano Laboratory
44--23. Filter Design23. Filter Design
Figure 4.6. Showing the phase lag with a Butterworth low pass
fFigure 4.6. Showing the phase lag with a Butterworth low pass
filter.ilter.
0.9 0.95 1 1.05 1.1 1.15 1.2 1.25 1.3-15
-10
-5
0
5
10
15
Time (s)
Active com ponent lags behind the passive com ponent .
Dampin
gForce(N)
passive
active
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
60/115
Smart Structures Bio-Nano Laboratory
44
--24. Filter Design24. Filter Design
Several ideas were explored to resolve this phase lag issue
andSeveral ideas were explored to resolve this phase lag issue and
improveimprove
results.results.
A phase lag compensator can be used to correct the phase lag.A
phase lag compensator can be used to correct the phase lag.
Displacement and velocity feedback control with phase lag can
beDisplacement and velocity feedback control with phase lag can
be
resolved into corrected displacement and velocity
components.resolved into corrected displacement and velocity
components.
This feedback can be used in a linear control law.This feedback
can be used in a linear control law. The limitation of this
technique is that both position and velocThe limitation of this
technique is that both position and velocityity
feedback are needed.feedback are needed.
Another idea is the concept of an ideal filter, as seen in
FigurAnother idea is the concept of an ideal filter, as seen in
Figure 4.7.e 4.7.
This filter would have no phase lag at any frequency.This filter
would have no phase lag at any frequency.
The amplitude cutThe amplitude cut--off is perfect at the cutoff
frequency.off is perfect at the cutoff frequency.
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
61/115
Smart Structures Bio-Nano Laboratory
44--25. Filter Design25. Filter Design
Figure 4.7. Characteristics of an ideal lowFigure 4.7.
Characteristics of an ideal low--pass filter.pass filter.
Frequency (Hz)
Frequency (Hz)
0
180
180
0
1
0
-1
0 30
Phase
Magnitude
Ideal Low Pass Filter
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
62/115
Smart Structures Bio-Nano Laboratory
44
--26. Filter Design26. Filter Design
To get the desired results for this type of control system,
reseTo get the desired results for this type of control system,
researcharch
showed that the design of the low pass filter is a very
importanshowed that the design of the low pass filter is a very
important factor.t factor.
Research also showed that compensating for phase lag is
veryResearch also showed that compensating for phase lag is
verycomplicated.complicated.
While this subject needs further research, a simpler approach
waWhile this subject needs further research, a simpler approach was
takens taken
for this model.for this model.
To illustrate the adverse affects of the low pass filter, the
fiTo illustrate the adverse affects of the low pass filter, the
filter waslter was
simply turned off when the compressor was off.simply turned off
when the compressor was off.
The filter was there for the sole purpose of taking out the
compThe filter was there for the sole purpose of taking out the
component inonent in
the relative velocity response due to the compressor.the
relative velocity response due to the compressor.
If the compressor is not running, there is no reason to have
theIf the compressor is not running, there is no reason to have the
filter on.filter on.
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
63/115
Smart Structures Bio-Nano Laboratory
44--27. Control Law Design27. Control Law Design
A skyhook control algorithm was considered for the control of
thA skyhook control algorithm was considered for the control of
thee
isolator.isolator. It was based on the following logic:It was
based on the following logic:
Figure 4.9. Diagram of skyhook control law.Figure 4.9. Diagram
of skyhook control law.
Positive absolute velocity (+)
Negative absolute velocity (-)
Negative relative velocity (-)
Positive relative velocity (+)
Negative relative velocity (-)
Positive relative velocity (+) Controller ON
Controller OFF
Controller ON
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
64/115
Smart Structures Bio-Nano Laboratory
44--28. Control Law Design28. Control Law Design
A careful evaluation of the results showed that the active MR
coA careful evaluation of the results showed that the active MR
componentmponent
would not react immediately to the bump in the model.would not
react immediately to the bump in the model.
Figure 4.10. Skyhook control law does not allow theFigure 4.10.
Skyhook control law does not allow the
isolator to react properly to a bump.isolator to react properly
to a bump.
0.9 0.95 1 1.05 1.1 1.15 1.2 1.25 1.3-15
-10
-5
0
5
10
15
Time (s)
Skyhook control does not allow the active component to react
properly.
Damp
ing
Forc
e(N)
passive
active
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
65/115
Smart Structures Bio-Nano Laboratory
44--29. Control Law Design29. Control Law Design
A relative skyhook control algorithm was investigated. It was bA
relative skyhook control algorithm was investigated. It was based
onased on
the logic below. It was quickly noted that this control was
thethe logic below. It was quickly noted that this control was the
same assame as
always having the control on.always having the control on.
Figure 4.11. Diagram of relative skyhook control law.Figure
4.11. Diagram of relative skyhook control law.
Positive relative velocity (+)
Negative relative velocity (-) Negative relative velocity
(-)
Positive relative velocity (+) Controller ON
Controller ON
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
66/115
Smart Structures Bio-Nano Laboratory
44--30. Control Law Design30. Control Law Design
With no skyhook control, the isolator is able to react
properly.With no skyhook control, the isolator is able to react
properly.
Figure 4.12. No skyhook control allows the isolator to react
prFigure 4.12. No skyhook control allows the isolator to react
properly.operly.
0.9 0.95 1 1.05 1.1 1.15 1.2 1.25 1.3-15
-10
-5
0
5
10
15
Time (s)
No sky hook control allows the active component to react
properly.
DampingF
orce(N)
passive
active
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
67/115
Smart Structures Bio-Nano Laboratory
44--31. Control Law Design31. Control Law Design
In the control system shown in Figure 4.3, an accelerometer is
lIn the control system shown in Figure 4.3, an accelerometer is
locatedocated
on the compressor and another accelerometer is located on the
veon the compressor and another accelerometer is located on the
vehiclehicle
body.body.
The acceleration signals can be integrated and then subtracted
tThe acceleration signals can be integrated and then subtracted to
giveo give
the velocity of the compressor relative to the vehicle body.the
velocity of the compressor relative to the vehicle body.
This relative velocity is used as a feedback signal in the
contrThis relative velocity is used as a feedback signal in the
contrololalgorithm.algorithm.
While this approach is feasible, the two channels of data
acquisWhile this approach is feasible, the two channels of data
acquisition andition and
the signal processing would add complication and cost to the
isothe signal processing would add complication and cost to the
isolatorlator
system.system.
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
68/115
Smart Structures Bio-Nano Laboratory
44--32. Control Law Design32. Control Law Design
Another approach is to design a direct relative velocity
sensorAnother approach is to design a direct relative velocity
sensor that isthat is
built into the isolator.built into the isolator.
The velocity of the piston in the isolator with respect to the
bThe velocity of the piston in the isolator with respect to the
base is thease is therelative velocity that must be
measured.relative velocity that must be measured.
It may be possible to have a magnet built into the piston rod
anIt may be possible to have a magnet built into the piston rod and
a smalld a small
coil of wire attached to the isolator housing which is
attachedcoil of wire attached to the isolator housing which is
attached to theto thebase.base.
The magnet moving through the coil of wire around the piston
rodThe magnet moving through the coil of wire around the piston rod
willwill
produce a voltage in the coil that will be proportional to the
vproduce a voltage in the coil that will be proportional to the
velocity ofelocity of
the magnet relative to the coil.the magnet relative to the
coil.
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
69/115
Smart Structures Bio-Nano Laboratory
44--33. Control Law Design33. Control Law Design
Another possible approach is to use a Linear Variable
DifferentiAnother possible approach is to use a Linear Variable
Differentialal
Transformer.Transformer.
These devices are used to measure relative displacement and
mayThese devices are used to measure relative displacement and may
bebeadapted to measure velocity, or the derivative of the
relativeadapted to measure velocity, or the derivative of the
relative
displacement may be taken to obtain relative
velocity.displacement may be taken to obtain relative velocity.
A design with a sensor in each isolator would have the added
posA design with a sensor in each isolator would have the added
possibilitysibilityand advantage of individually controlling each
isolator. This wand advantage of individually controlling each
isolator. This wouldould
provide rotational isolation for the component and is a
potentiaprovide rotational isolation for the component and is a
potentially simplelly simple
approach to achieve multiapproach to achieve
multi--degreedegree--ofof--freedom control.freedom control.
The development of such a sensor should be investigated in
futurThe development of such a sensor should be investigated in
futuree
work.work.
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
70/115
Smart Structures Bio-Nano Laboratory
44--34. System Inputs34. System Inputs
The unbalance force due to the compressor rotation is
simulatedThe unbalance force due to the compressor rotation is
simulated as aas a
sinusoidal force input to the compressor mass.sinusoidal force
input to the compressor mass. As discussed earlier,As discussed
earlier,
the compressor is turned on and off during the simulation.the
compressor is turned on and off during the simulation.
The vehicle body motion is modeled as a body heave mode, with
aThe vehicle body motion is modeled as a body heave mode, with
a
speed bump input midway through the simulation.speed bump input
midway through the simulation.
Both inputs can be seen in Figure 4.13.Both inputs can be seen
in Figure 4.13.
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
71/115
Smart Structures Bio-Nano Laboratory
44--35. System Inputs35. System Inputs
Figure 4.13. Model inputs for the compressor and vehicle
body.Figure 4.13. Model inputs for the compressor and vehicle
body.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2-20
-10
0
10
20
No
ise
Sourc
eInpu
t(N)
Model Inputs
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2-0.05
0
0.05
Ve
hicleBo
dy
Mo
tion
(m)
Time (s)
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
72/115
Smart Structures Bio-Nano Laboratory
44--36. System Outputs36. System Outputs
The main outputs from the simulation are:The main outputs from
the simulation are:
Power spectral density of the transmitted force at 50 Hz,
thePower spectral density of the transmitted force at 50 Hz,
the
frequency of the compressor.frequency of the compressor. The PSD
is calculated during the timeThe PSD is calculated during the
timeperiod that the compressor is on. An example of the PSD is
seenperiod that the compressor is on. An example of the PSD is seen
inin
Figure 4.14.Figure 4.14.
Maximum relative displacement between the compressor and
theMaximum relative displacement between the compressor and
thevehicle body.vehicle body. This occurs shortly after the bump.
This isThis occurs shortly after the bump. This is
considered a measure of durability of the isolator.considered a
measure of durability of the isolator.
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
73/115
Smart Structures Bio-Nano Laboratory
44--37. System Outputs37. System Outputs
Figure 4.14. Example of a power spectral density plot.Figure
4.14. Example of a power spectral density plot.
0 50 100 150 200 250 300 350 400 450 50010
-6
10-4
10-2
100
102
Frequency (Hz)
Power Spectral Density
(N2
/Hz)
Power spectral density of the transmitted force.
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
74/115
Smart Structures Bio-Nano Laboratory
44--38. Detailed Design Of The MR Isolator38. Detailed Design Of
The MR Isolator
Once the control and filter issues were resolved, a fluid was
chOnce the control and filter issues were resolved, a fluid was
chosen.osen.
Lord Corporations web site was used to get fluid properties
onLord Corporations web site was used to get fluid properties on
theirtheir
product MRF 132LD. This fluid was chosen because it had low
visproduct MRF 132LD. This fluid was chosen because it had low
viscositycosityproperties.properties.
The properties of MRF 132LD can be seen in Figure 4.15.The
properties of MRF 132LD can be seen in Figure 4.15.
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
75/115
Smart Structures Bio-Nano Laboratory
44--39. Detailed Design Of The MR Isolator39. Detailed Design Of
The MR Isolator
Figure 4.15. Properties of MRF 132LD.Figure 4.15. Properties of
MRF 132LD.
0 50 100 150
0
2
4
MR Fluid Characteristics - MRF 132LD - Lord Corporation
Shear Rate (1/s)
V
iscosity(Pas)
0 0.5 1 1.5 2 2.5 3
x 105
0
1
2
3
4
5x 10
4
H (Amp/m)
Yield
Stress(Pa)
0 0.5 1 1.5 2 2.5 3
x 105
0
0.5
1
H (Amp/m)
B(Tesla)
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
76/115
Smart Structures Bio-Nano Laboratory
44--40. Detailed Design Of The MR Isolator40. Detailed Design Of
The MR Isolator
Using the fluid properties, the size of the isolator needed to
oUsing the fluid properties, the size of the isolator needed to
obtain thebtain the
performance necessary was determined.performance necessary was
determined.
The power capability and coil design needed to generate the
poweThe power capability and coil design needed to generate the
power wasr wasalso determined.also determined.
Final design parameters, such as weight, size, fluid volume,
coiFinal design parameters, such as weight, size, fluid volume,
coill
length,etc., were determined.length,etc., were determined.
Results are compared.Results are compared.
The goal is to show that the semiThe goal is to show that the
semi--active design can give the sameactive design can give the
same
maximum relative displacement as the passive baseline, but, in
amaximum relative displacement as the passive baseline, but, in
addition,ddition,provide a significant reduction in noise
transmission.provide a significant reduction in noise
transmission.
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
77/115
Smart Structures Bio-Nano Laboratory
55--1. RESULTS1. RESULTS
The results of the passive and semiThe results of the passive
and semi--active models are plotted. Theactive models are plotted.
The
maximum relative displacement and transmitted force seen with
thmaximum relative displacement and transmitted force seen with
thee
passive system are plotted. These results are used to develop
tpassive system are plotted. These results are used to develop
thehe
baseline performance of the passive isolator.baseline
performance of the passive isolator.
The following four designs are discussedThe following four
designs are discussed::
Design Case 1Design Case 1 Passive rubber isolator.Passive
rubber isolator.
Design Case 2Design Case 2 Passive rubber isolator with passive
MR fluid.Passive rubber isolator with passive MR fluid.
Design Case 3Design Case 3 Passive rubber isolator with active
MR fluid withPassive rubber isolator with active MR fluid with
Butterworth filter.Butterworth filter.
Design Case 4Design Case 4 Passive rubber isolator with active
MR fluid withPassive rubber isolator with active MR fluid with
filter off.filter off.
The forces seen in the different isolator components are
evaluatThe forces seen in the different isolator components are
evaluated.ed.
The change in viscosity of the fluid is analyzed.The change in
viscosity of the fluid is analyzed.
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
78/115
Smart Structures Bio-Nano Laboratory
55--2. Results For The Passive Isolator Design2. Results For The
Passive Isolator Design
The power spectrum of the transmitted noise at 50 Hz is seen
toThe power spectrum of the transmitted noise at 50 Hz is seen to
increaseincrease
as the stiffness of the isolator increases.as the stiffness of
the isolator increases.
Figure 5.1. The effect of passive stiffness seen on
transmittedFigure 5.1. The effect of passive stiffness seen on
transmitted force.force.
Power Spectrum Of Transmitted Noise @ 50 Hz
0.000
1.000
2.000
3.000
4.000
5.000
6.000
7.000
8.000
0 10000 20000 30000 40000 50000
Stiffness (N/m)
PSOfTransmittedNoise(
N^2/Hz)
PASSIVE RESULTS
Baseline Transmission
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
79/115
Smart Structures Bio-Nano Laboratory
55--3. Results For The Passive Isolator Design3. Results For The
Passive Isolator Design
The maximum relative displacement is seen to decrease as the
stiThe maximum relative displacement is seen to decrease as the
stiffnessffness
of the isolator increases.of the isolator increases.
Figure 5.2. The effect of passive stiffness seen onFigure 5.2.
The effect of passive stiffness seen on
maximum relative displacement.maximum relative displacement.
Maximum Relative Displacement
0.0
5.0
10.0
15.0
20.0
25.0
30.0
0 10000 20000 30000 40000 50000
Stiffness (N/m)
MaxRelDisp
(mm)
PASSIVE RESULTS
Baseline Displacement
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
80/115
Smart Structures Bio-Nano Laboratory
55--4. Results For The Passive Isolator Design4. Results For The
Passive Isolator Design
From the previous two figures, the baseline performance of the
iFrom the previous two figures, the baseline performance of the
isolatorsolator
is determined. This is seen below.is determined. This is seen
below.
(i)(i) Maximum relative displacement of 2.3 mm.Maximum relative
displacement of 2.3 mm.
(ii)(ii) Maximum transmitted force from the compressor of 6.3
NMaximum transmitted force from the compressor of 6.3
N22/Hz./Hz.
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
81/115
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
82/115
Smart Structures Bio-Nano Laboratory
55--6. Results For The Semi6. Results For The Semi--Active
Isolator DesignActive Isolator Design
The maximum relative displacement is seen to decrease as the
stiThe maximum relative displacement is seen to decrease as the
stiffnessffness
of the isolator increases.of the isolator increases.
Figure 5.4. The effect of passive stiffness seen onFigure 5.4.
The effect of passive stiffness seen on
maximum relative displacement.maximum relative displacement.
Maximum Relative Displacement
0.0
5.0
10.0
15.0
20.0
25.0
30.0
0 10000 20000 30000 40000 50000
Stiffness (N/m)
MaxRelDisp
(mm)
PASSIVE RESULTS
MR INACTIVE RESULTS
MR ACTIVE RES ULTS -- Butterworth Lowpass Filter
MR ACTIVE RESULTS -- Ideal Low Pass Filter
Baseline Displacement
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
83/115
Smart Structures Bio-Nano Laboratory
55--7. Results For The Semi7. Results For The Semi--Active
Isolator DesignActive Isolator Design
The results show the passive component of the MR fluid has aThe
results show the passive component of the MR fluid has a
significant affect on results.significant affect on results.
As expected, the maximum relative displacement is reduced, and
tAs expected, the maximum relative displacement is reduced, and
thehetransmitted force increases.transmitted force increases.
The following effects were seen when the active component of
theThe following effects were seen when the active component of the
MRMR
fluid is introduced with the Butterworth filter.fluid is
introduced with the Butterworth filter.
The maximum relative displacement at low stiffness is
reduced.The maximum relative displacement at low stiffness is
reduced.
However, there is little effect at higher stiffness.However,
there is little effect at higher stiffness.
The transmitted noise is not affected much by the active
componeThe transmitted noise is not affected much by the active
component.nt.
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
84/115
Smart Structures Bio-Nano Laboratory
55--8. Results For The Semi8. Results For The Semi--Active
Isolator DesignActive Isolator Design
When the filter is turned off, the active fluid is in phase
andWhen the filter is turned off, the active fluid is in phase and
the resultsthe results
improve significantly.improve significantly.
With the filter turned off, the following effects are seen in
thWith the filter turned off, the following effects are seen in the
results:e results:
The transmitted force is not affected.The transmitted force is
not affected.
The maximum relative displacement is reduced at each
stiffness.The maximum relative displacement is reduced at each
stiffness.
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
85/115
Smart Structures Bio-Nano Laboratory
55--9. Results For The Semi9. Results For The Semi--Active
Isolator DesignActive Isolator Design
Figure 5.5. Improvement to relative displacement with MR
fluid.Figure 5.5. Improvement to relative displacement with MR
fluid.
0.9 1 1.1 1.2 1.3 1.4 1.5 1.6-8
-6
-4
-2
0
2
4
6
8x 10
-3
Time (s)
Re
lative
Disp
lacemen
t(m)
Passive
Pass ive M R
Active M R
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
86/115
Smart Structures Bio-Nano Laboratory
55--10. Results For The Semi10. Results For The Semi--Active
Isolator DesignActive Isolator Design
The results can be seen in Table 5.1.The results can be seen in
Table 5.1.
Shown in the table are the following properties:Shown in the
table are the following properties:
(i)(i) Isolator stiffness.Isolator stiffness.
(ii)(ii) Isolator passive damping ratio.Isolator passive damping
ratio.
(iii)(iii) Compressor mass per isolator.Compressor mass per
isolator.
(iv)(iv) Natural frequency of the isolator.Natural frequency of
the isolator.
(v)(v) Maximum relative displacement.Maximum relative
displacement.
(vi)(vi) Compressor transmitted force.Compressor transmitted
force.
(vii)(vii) Maximum forces seen by the isolator
components.Maximum forces seen by the isolator components.
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
87/115
Smart Structures Bio-Nano Laboratory
55--11. Results For The Semi11. Results For The Semi--Active
Isolator DesignActive Isolator Design
Table 5.1. Summary of simulation results.Table 5.1. Summary of
simulation results.
PASSIVE RESULTS POWER SPECTRUM
stiffness mass zeta nat. freq. scale max. rel. displacement
comp. transmitted spring damper passive fluid active fluid
total
(N/m) (kg) (Hz) (mm) (N 2/Hz) (N) (N) (N) (N) (N)
50000 1 0.1 35.6 0 2.3 6.300 113.7 26.6 0 0 116.0
30000 1 0.1 27.6 0 3.0 1.300 91.4 21.7 0 0 93.3
10000 1 0.1 15.9 0 6.2 0.100 62.0 11.9 0 0 62.9
5000 1 0.1 11.3 0 12.8 0.030 63.8 14.7 0 0 65.1
1000 1 0.1 5.0 0 26.3 0.003 26.3 5.0 0 0 27.7
MR INACTIVE RESULTS POWER SPECTRUM
stiffness mass zeta nat. freq. scale max. rel. displacement
comp. transmitted spring damper passive fluid active fluid
total
(N/m) (kg) (Hz) (mm) (N 2/Hz) (N) (N) (N) (N) (N)
50000 1 0.1 35.6 0 2.1 6.50 105.0 27.6 15.7 0 110.5
30000 1 0.1 27.6 0 2.6 2.10 79.2 21.1 15.5 0 84.5
10000 1 0.1 15.9 0 4.3 0.70 42.5 12.0 15.3 0 47.0
5000 1 0.1 11.3 0 7.1 0.54 35.5 11.5 20.9 0 42.0
1000 1 0.1 5.0 0 15.6 0.43 15.6 3.8 15.2 0 21.4
MR ACTIVE RESULTS -- Butterworth Lowpass Fil ter POWER
SPECTRUM
stiffness mass zeta nat. freq. scale max. rel. displacement
comp. transmitted spring damper passive fluid active fluid
total
(N/m) (kg) (Hz) (mm) (N 2/Hz) (N) (N) (N) (N) (N)
50000 1 0.1 35.6 10000 2.1 6.75 104.4 27.4 15.6 7.4 112.4
30000 1 0.1 27.6 10000 2.6 2.06 78.4 21.5 15.8 8.8 88.0
10000 1 0.1 15.9 10000 4.0 0.66 40.2 13.4 15.2 50.4 56.7
5000 1 0.1 11.3 30000 5.0 0.43 24.8 11.5 20.6 56.4 80.5
1000 1 0.1 5.0 30000 6.0 0.32 6.0 3.8 17.1 13.7 57.8
MR ACTIVE RESULTS -- Ideal Low Pass Filter POWER SPECTRUM
stiffness mass zeta nat. freq. scale max. rel. displacement
comp. transmitted spring damper passive fluid active fluid
total
(N/m) (kg) (Hz) (mm) (N 2/Hz) (N) (N) (N) (N) (N)50000 1 0.1
35.6 45000 1.5 7.70 75.7 26.7 15.2 121.6 158.5
30000 1 0.1 27.6 45000 1.7 2.10 49.6 20.9 15.3 122.5 152.9
10000 1 0.1 15.9 45000 2.5 0.60 25.2 12.2 15.5 124.1 144.7
5000 1 0.1 11.3 45000 3.2 0.40 15.7 8.5 15.2 121.7 141.4
1000 1 0.1 5.0 45000 3.6 0.30 3.6 3.7 14.8 118.4 136.9
MAXIMUM FORCES
MAXIMUM FORCES
MAXIMUM FORCES
MAXIMUM FORCES
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
88/115
Smart Structures Bio-Nano Laboratory
55--12. Results For The Semi12. Results For The Semi--Active
Isolator DesignActive Isolator Design
The maximum forces are shown in the right columns of Table
5.1.The maximum forces are shown in the right columns of Table 5.1.
TheyThey
give an indication of how the forces seen by the different
compogive an indication of how the forces seen by the different
components ofnents of
the isolator compare to each other.the isolator compare to each
other.
The columns are linked to the following forces:The columns are
linked to the following forces:
(i)(i) Spring force resulting from the passive stiffness
component k.Spring force resulting from the passive stiffness
component k.
(ii)(ii) Damper force resulting from the passive damping
component c.Damper force resulting from the passive damping
component c.
(iii)(iii) Fluid force resulting from the passive component of
the MR fluidFluid force resulting from the passive component of the
MR fluid..
(iv)(iv) Fluid force resulting from the active component of the
MR fluid.Fluid force resulting from the active component of the MR
fluid.
(v)(v) Total force resulting from the sum of all the isolator
forces.Total force resulting from the sum of all the isolator
forces.
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
89/115
Smart Structures Bio-Nano Laboratory
55--13. Results For The Semi13. Results For The Semi--Active
Isolator DesignActive Isolator Design
The results show the force resulting from the passive
stiffnessThe results show the force resulting from the passive
stiffness andand
damping components decreases as the passive stiffness of the
isodamping components decreases as the passive stiffness of the
isolatorlator
decreases.decreases.
This explains why transmitted noise decreases when stiffness
andThis explains why transmitted noise decreases when stiffness
and
damping decrease.damping decrease.
Also, the results show the negative affect on relative
displacemAlso, the results show the negative affect on relative
displacement, andent, and
thus durability, when the stiffness decreases.thus durability,
when the stiffness decreases.
-
8/13/2019 Semi-Active Magnetorheologic, Greg Stelzer
90/115
Smart Structures Bio-Nano Laboratory
55--14. Results For The Semi14. Results For The Semi--Active
Isolator DesignActive Isolator Design
The active results show why turning the filter off is
necessary.The active results show why turning the filter off is
necessary.
When the Butterworth low pass filter is used, the active
componeWhen the Butterworth low pass filter is used, the active
component ofnt of
the MR fluid is roughly the same size as the passive component
othe MR fluid is roughly the same size as the passive component of
thef theMR fluid. If the active force is scaled higher than this,
the iMR fluid. If the active force is scaled higher than this, the
isolato