Embed Size (px)
DESCRIPTION
3. 2. 1. Carbonate Sand. Sea Grass (Thalasia). Reef. Sea Water. (b). (c). P reg ( i ). P 0 ( i ). P ( i ). 1.5. 1. E ik ( ). 0.5. CONTACT: 1 [email protected] , tel. (787) 832-4040 x3248, 2 aUmañ[email protected] , tel. (787) 834-7620 x2295 - PowerPoint PPT Presentation
Citation preview

The radiance received by a spaceborne or airborne instrument looking at nadir at an altitude of Z (km) is described by the RTE for plane parallel atmospheres as stated by Lenoble [1] is given by:
where J(z) is a source function. The term is the medium transmittance from level s=0 to level s=Z, and defined as:
where (r) is the extinction coefficient. A semi-analytical model based on the RTE was used to mathematically represent the propagation of the signal through the medium. The model used was proposed by Lee in [3, 4]. In this model the signal received by the sensor is represented as:
with,
and
where rrs is the subsurface remote sensing reflectance, w is solar zenith angle, is the bottom albedo, H is the
bottom depth, a is the absorption coefficient and b is the backscattering coefficient, the last two being wavelength dependent. The signal the sensor receives is what is known as above-surface remote sensing reflectance (Rrs) and is
related to the subsurface remote sensing reflectance by:
Thus, this model depends on the following variables H, w, , a and b. The bottom albedo () is the quantity we want to attain after the inversion process.
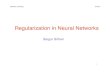
Selecting the Regularization Parameter by minimizing the Euclidean Selecting the Regularization Parameter by minimizing the Euclidean DistanceDistanceDefine Eki() as the error for every pixel after inverting the kth pixel in the imagery at each for
the albedo of the ith spectral signature as:
where Preg(k) is the regularized pixel k , and P0(i) is the a priori estimate of the ith signal without
the medium, which are calibrated stored spectral signatures. The optimum opt(ki) for kth pixel and
ith signal will be selected as point of maximum curvature of the error function Eki(), defined as:
The resulting stored spectral signature approach P0(i) and regularization parameter is obtained
by:
Selection of the regularization parameterSelection of the regularization parameter
Forward Model – Matrix FormForward Model – Matrix Form
where meanwhile
is the water column contribution at i wavelength. Our interest is to estimate (i) from the
measured Rrs.
Inverse ProblemInverse Problem
where P is the least square solution. . This formulation is often used when the problem is overdetermined, meaning that with m > n. In this case m = n as a consequence the least square problem can be stated as P = A-1b. Yet, this formulation does not account for the uncertainties (H, w, a and b) present in the problem.
Inverse problem solutionInverse problem solution using Tikhonov regularization can be expressed as:
or
P0 represents the spectral signature of an object of interest (spectral signatures of coral reefs,
pollution plume, sand, grass, etc.). For computational purposes 2 has been expressed as with .
Figure 1. Figure 1. Relation between the parameter , the regularized albedo Preg and the stored spectral signature P0.
Problem FormulationProblem Formulation
[1] Lenoble, J., Atmospheric radiative transfer. A. Deepak Publishing, 1993.[2] Vélez M., Jiménez L. “Subset Selection Analysis for the Reduction of Hyperspectral Imagery”, Geoscience and Remote Sensing Symposium Proceedings, 1998. IGARSS '98. IEEE International Volume 3, pp 1577 -1581, 1998.[3] Zhongping, L., Carder, C., Mobley, C., Steward, R., Patch, J., “Hyperspectral remote sensing for shallow waters: 1. A semianalytical model” Applied Optics, vol. 37, No.27, September 20 1998, pp. 6329-6338.[4] Zhongping, L., Carder, C., Mobley, C., Steward, R., Patch, J., “Hyperspectral remote sensing for
shallow waters: 2. Deriving bottom depths and water properties by optimization” Applied Optics, vol. 38 No18, June 20 1999, pp. 3831-3843.[5] Jimenez, L.O., Rodriguez-Díaz, E., Velez-Reyes, M., DiMarzio, C., ”Image Reconstruction and Subsurface Detection by the Application of Tikhonov Regularization to Inverse Problems in Hyperspectral Images, ” SPIE Asia-Pacific, Hangzhou China, October 2002.[6] Rodriguez-Díaz, E., Jimenez-Rodriguez, L.O., Velez-Reyes, M., "Subsurface Detection of Coral Reefs in Shallow Waters using Hyperspectral Data,”
SPIE AeroSense 2003, Orlando, Florida, April 2003.[7] Jimenez, L.O., Umaña-Díaz, A., Díaz-Santos, J., Geradino-Neira, C., Morales-Morales, J., Rodriguez, Díaz, E., “Subsurface Object Recognition by Means of Regularization Techniques for Mapping Coastal Waters Floor, ” SPIE Europe, Bruges, Belgium, September 2005.
Subsurface Object Recognition by Means of Regularization Techniques Subsurface Object Recognition by Means of Regularization Techniques for Mapping Coastal Waters Floorfor Mapping Coastal Waters Floor
Luis O. Jiménez-Rodríguez 1, Alejandra Umaña-Díaz2, Jose Díaz-Santos3, Gerardino Neira-Carolina4, Javier Morales-Morales5, Eladio Rodriguez6
University of Puerto Rico Mayagüez CampusUniversity of Puerto Rico Mayagüez Campus
Further development and tuning of this algorithm. It will be applied to the case of one object of interest versus an unknown background. Addition of spatial information.
Adaptation and application to Bio-Med Testbed will be in place.
As can be observed the data was well analyzed even on the conditions of lack of precise knowledge of the parameters of the shallow ocean waters. The incorporation of physics-based models plus the fusion of a priori information in the forms of store signatures about the solution increases the detection performance of objects of interests under shallow coastal waters. The use of a methodology that incorporates a priori information increases classification accuracy when compared to methodologies that do not.
A fundamental challenge to Remote Sensing is mapping the ocean floor in coastal shallow waters where variability, due to the interaction between the coast and the sea, can bring significant disparity in the optical properties of the water column. The objects to be detected, coral reefs, sands and submerged aquatic vegetation, have weak signals, with temporal and spatial variation. In real scenarios the absorption and backscattering coefficients have spatial variation due to different sources of variability (river discharge, different depths of shallow waters, water currents) and temporal fluctuations. This paper presents the development of algorithms for retrieving information and its application to the recognition, classification and mapping of objects under coastal shallow waters. A mathematical model that simplifies the radiative transfer equation was used to quantify the interaction between the object of interest, the medium and the sensor. The retrieval of information requires the development of mathematical models and processing tools in the area of inversion, image reconstruction and detection. The algorithms developed were applied to one set of remotely sensed data: a high resolution HYPERION hyperspectral imagery. An inverse problem arises as this spectral data is used for mapping the ocean shallow waters floor. Tikhonov method of regularization was used in the inversion process to estimate the bottom albedo of the ocean floor using a priori information in the form of stored spectral signatures, previously measured, of objects of interest, such as sand, corals, and sea grass.
AbstractAbstract
The goal of this research is to analyze the spectral signals to retrieve information content through inversion methods, feature extraction/dimensional reduction and the detection/classification methods in hyperspectral data analysis under conditions of lack of precise knowledge of medium parameters, i.e. absorption and scattering properties of water, along with absorption and scattering of chlorophyll, organic material and suspended sediment present in the medium. This will improve the detection of objects embedded in highly complex medium.
GoalGoal
CONTACT:CONTACT:1 [email protected], tel. (787) 832-4040 x3248, 2 aUmañ[email protected], tel. (787) 834-7620 x22953 [email protected], tel. (787) 832-4040 x22954 [email protected], tel. (787) 832-4040 x22955 [email protected], tel. (787) 832-4040 x22956 [email protected]
Radiative Transfer Equation (RTE)Radiative Transfer Equation (RTE)
ds
s
ZssJZLZL
Z
o
,
,0)0(
drrZs
Z
s exp,
kHDkHDrr B
uw
Cu
w
dprsrs )cos(
1exp
1
)cos(
1exp1
uur dprs 170.0084.0 5.04.5104.1 uDB
u uur dprs 170.0084.0
ba
bu
bak
rs
rsrs r
rR
5.11
5.0
ddd
dcoldrs
colrs
colrs
da
a
a
Sr
Sr
Sr
b
b
b
.
.
.
...00.
.
.
.
.
.
.
.
.0...0
0...0
.
.
.
.
.
.2
1
22
11
22
11
2
1
APb
kHDa B
uw
ii )cos(
1exp
1
kHDrS C
uw
dprscol )cos(
1exp1
2
2minarg bAPP
mxnA
2
2022
2minarg PPbAPP reg
)()( 0212 PbAIAAP tt
reg
2
1 1,0
P(i) Preg(i)
1
0P0(i)
Eki Preg k P0 i 2
2
2
3
1
maxarg
ki
ki
iopt
E
Eki
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.5
1
1.5
opt(ki)
Eik(
)
Figure 2.Figure 2. Choosing the optimum value opt(ki) from the set [0, 1).
)()( minarg kioptiki
kopt E
Experimental ResultsExperimental Results
12
3
Carbonate
Sand
Sea Grass
(Thalasia) ReefSea
Water
Spaceborne Multispectral and Hyperspectral Spaceborne Multispectral and Hyperspectral DataData
The data to be analyzed was gathered using Hyperion sensor and IKONOS sensor. Data was calibrated and atmospheric corrected using ACORN.In the case of Hyperion imagery we choose the fifteen most independent bands using the SVDSS feature selection method [2].
ConclusionConclusion
Future WorkFuture Work
ReferencesReferences
(a)
(a) (b) (c)
Figure 3.Figure 3. Hyperion imagery (a), classification using the spectral signatures without inversion (b), classification after inversion and regularization (c).
Figure 4.Figure 4. Ikonos imagery (a), classification using the spectral signatures without inversion (b), classification after inversion and regularization (c).
La Parguera
La Parguera is in the southwest coast of Puerto Ricoin the municipality of Lajas.
This project was partially supported by the Engineering Research Centers Program of the National Science Foundation under Award # EEC-9986821The authors want to acknowledge Dr. James Goodman who works at LARSIP, University of Puerto Rico at Mayaguez for providing the calibrated store signatures.
AcknowledgmentsAcknowledgments
![arXivarXiv:1604.01906v2 [math.AP] 13 Sep 2016 EXISTENCE OF MINIMIZING WILLMORE KLEIN BOTTLES IN EUCLIDEAN FOUR-SPACE PATRICK BREUNING, JONAS HIRSCH, AND ELENA MADER-BAUMDICKER¨ Abstra](https://img.pdfslide.us/doc/110x75/5f113d877f1cad5b4829c9e3/arxiv-arxiv160401906v2-mathap-13-sep-2016-existence-of-minimizing-willmore.jpg)