Embed Size (px)
Citation preview

Segmentation d’images couleur
Ludovic Macaire � Sylvie Philipp-Foliguet �
� LAGIS - UMR CNRS 8146 - Cité Scientifique, Bat P2, 59655 Villeneuve d’Ascq cedex - France� ENSEA ETIS - UMR CNRS 8051 - 6, avenue du Ponceau 95014 Cergy Pontoise Cedex France
[email protected],[email protected]
RésuméLa segmentation consiste à partitionner l’image en régionsdisjointes avec des couleurs homogènes. Les méthodesde segmentation d’images couleur peuvent être divisées endeux familles, selon qu’elles analysent la distribution descouleurs des pixels dans le plan image ou dans un espacecouleur. La première partie de cet exposé ne décrira pastoutes les méthodes de segmentation existantes, mais dé-taillera les méthodes de croissance et de fusion de régions,ainsi que les méthodes par classification de pixels. La sec-onde partie de l’exposé sera consacrée à l’évaluation dela qualité de résultats obtenus par une procédure de seg-mentation. En l’absence d’une vérité-terrain, il est souventdifficile d’estimer visuellement la qualité d’une image seg-mentée. Nous décrirons alors des critères quantitatifs per-mettant de comparer des résultats de segmentation. Cescritères tiennent compte d’informations topologiques desrégions reconstruites, des erreurs de classification des pix-els et introduisent la notion de multi-échelles pour définirles niveaux de détail fournis par les méthodes de segmen-tation testées.
Mots clefsSegmentation d’images, Evaluation de la qualité.
1 IntroductionLa segmentation d’une image couleur consiste à partition-ner l’image en régions disjointes. En général, on sup-pose que les différentes couleurs présentes dans l’imagecorrespondent principalement aux différentes orientationset propriétés de réflexion des surfaces des objets observésainsi qu’à la présence d’ombres. Les méthodes de seg-mentation analysent ces couleurs afin de distinguer lesdifférents objets qui composent une scène observée parune caméra couleur. Les différences entre les couleursprésentes dans l’image sont plus ou moins bien mises enévidence selon le système de représentation de la couleurutilisé.Nous divisons les méthodes de segmentation d’imagescouleur en deux familles principales, selon l’hypothèse ad-mise sur la formation des régions.La première suppose que les régions adjacentes représen-tant des objets différents présentent des discontinuités lo-
cales de leurs couleurs à leurs frontières. Les méthodesliées à cette approche, dite approche "contours", tentent derechercher les pixels contours couleur correspondant auxvariations locales significatives des couleurs des pixels.La seconde suppose qu’une région est constituée de pixelsconnexes partageant des propriétés colorimétriques sim-ilaires. Les méthodes relatives à cette approche, diteapproche "régions", recherchent dans l’image des sous-ensembles de pixels connexes dont les couleurs sont ho-mogènes.
2 Approche "contours"
La détection des pixels contours couleur se définit commela recherche de discontinuités locales de la couleur. Cetterecherche s’effectue soit par une analyse d’une seule imagede composante, soit par des analyses conjointes des im-ages de composante, soit par une analyse "vectorielle" del’image couleur. Nous nous limitons à la présentation desméthodes d’extraction des pixels contours couleur fondéessur la recherche des maxima d’une ou plusieurs normes degradients. Le résultat de la détection des pixels contourscouleur est une image binaire constituée des pixels con-tours et des pixels non contours.Les méthodes de détection des pixels contours couleur peu-vent se diviser en quatre groupes:
� les méthodes qui analysent un vecteur gradient cal-culé à partir d’une seule image de composante. Parexemple, l’exploitation de l’image de luminance per-met d’appliquer les méthodes de détection des pixelscontours dans les images en niveaux de gris. Cettedémarche s’avère satisfaisante quand les niveaux deluminance des pixels représentant les objets suffisentà les distinguer.
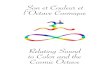
� les méthodes qui fusionnent les images binaires decontours obtenues par des analyses des images decomposante [1] (voir figure 1(a)).
� les méthodes qui exploitent la norme d’un gradientcouleur déterminée à partir des vecteurs gradients cal-culés dans les images de composante [2] (voir fig-ure 1(b)).

� les méthodes qui expriment un vecteur gradientcouleur à partir de vecteurs gradients calculés dans lesimages de composante. Les pixels contours couleursont détectés par une analyse du vecteur gradientcouleur [3, 4] (voir figure 1(c)).
Pour obtenir une partition de l’image en régions, il estnécessaire de chaîner les pixels contours afin qu’ils con-stituent des lignes fermées correspondant aux frontièresdes régions [1].Les méthodes de détection des pixels contours couleur sontadaptées à la segmentation d’images où les couleurs desrégions sont contrastées. Elles ne fournissent pas tou-jours des résultats satisfaisants quand les contours des ré-gions sont difficilement perceptibles dans l’image. Parailleurs, reconstruire les lignes fermées délimitant les ré-gions à partir des pixels contours couleur détectés reste unproblème délicat. Par conséquent, de nombreux auteurspréfèrent l’approche "régions" pour segmenter des imagesnumériques couleur.
3 Approche "régions"
La segmentation d’une image � en régions � � a pourbut de regrouper des pixels connexes ayant des couleurssimilaires, afin de constituer des régions de couleurs ho-mogènes, ces régions étant dans la mesure du possibleliées à un objet ou à une partie d’un objet représenté dansl’image [5].Les pixels de chaque région doivent respecter des critèresd’homogénéité et de connexité. L’homogénéité d’une ré-gion �� est définie par un prédicat d’uniformité, noté��������. Ce prédicat est vrai si �� est homogène, fauxdans le cas contraire.Les régions doivent respecter les quatre conditions suiv-antes :
� � ���
��,
� �� est constituée de pixels connexes pour tout �,
� ���� ���� � ���� pour tout �,
� ���� ��� � ��� � ��� pour tout � �� , �� et ��
étant adjacents dans �.
La première condition implique que chaque pixel del’image doit appartenir à une région � � et que l’union detoutes les régions correspond à l’image entière. La deux-ième condition est relative à la structure des régions. Elledéfinit une région comme un sous-ensemble de pixels con-nexes. La troisième condition exprime que chaque régiondoit respecter un prédicat d’uniformité. La dernière condi-tion implique la non-réalisation de ce même prédicat pourtoute réunion de deux régions adjacentes.Le résultat de la segmentation est une image dans laquelleest attribuée à chaque pixel une étiquette correspondant àla région à laquelle il appartient.Les méthodes de reconstruction de régions peuvent sediviser en deux grandes familles, selon que l’analyse
s’effectue dans le plan image ou dans un espace couleur [6,7].
3.1 Analyse dans le plan image
Les méthodes de segmentation par analyse spatiale duplan image regroupent des pixels connexes présentantdes couleurs similaires pour reconstruire les régions del’image. Elles représentent l’image sous la forme de struc-tures de données de type tétra-arbre (quadtree) ou de typegraphe d’adjacence de régions.Les méthodes de division-fusion des régions procèdentà l’analyse d’un tétra-arbre dont chaque noeud possèdeexactement quatre noeuds fils, exceptés les noeuds ter-minaux [8]. La racine de l’arbre correspond à l’imageentière dont les nombres de lignes et de colonnes doiventêtre des puissances de deux (voir figure 2). Chaque noeudreprésente un bloc, c’est à dire une zone de l’image deforme rectangulaire, dont les nombres de lignes et decolonnes sont également des puissances de deux.Chaque bloc associé à un noeud du tétra-arbre de la par-tition initiale est analysé de façon itérative afin de dé-cider s’il doit être divisé en quatre sous-blocs. L’analyseitérative s’arrête lorsque chaque sous-bloc respecte uncritère d’homogénéité. A ce stade de l’analyse, certainsblocs adjacents dans l’image présentent des caractéris-tiques colorimétriques identiques. C’est pourquoi ces cou-ples de blocs sont fusionnés. L’analyse s’arrête lorsqu’iln’existe plus de couple qui respecte le critère de fusion.L’inconvénient majeur du tétra-arbre réside dans la rigid-ité du découpage qu’il impose. Il conduit à une partitionglobale de l’image qui ne respecte pas toujours la formedes régions présentes dans l’image.Les méthodes de croissance de régions [9, 10] et de fu-sion de régions [11] s’appuient sur l’analyse d’un graphed’adjacence de régions. Il s’agit d’un graphe non-orientédont chaque noeud représente une région et chaque arêtereprésente une adjacence entre deux régions. Chaque ré-gion peut être constituée initialement d’un pixel dans lecadre de la croissance de régions, ou d’un sous-ensemblede pixels connexes quand l’image a été préalablement sur-segmentée. La figure 3(b) représente, à titre d’exemple, legraphe d’adjacence de régions obtenu à partir de l’imagepré-segmentée de la figure 3(a). L’analyse itérative dugraphe consiste à fusionner, à chaque itération, deuxnoeuds reliés par une arête à condition qu’ils respectent uncritère de fusion.Ces méthodes privilégient l’interaction spatiale entre lespixels, et ne font intervenir les propriétés colorimétriquesdes pixels qu’au stade de la décision de fusion ou divisiondes régions.Elles se distinguent par leur ordre de parcours des dif-férents noeuds et par les critères de fusion ou de divisionutilisés. Certaines méthodes nécessitent le réglage de nom-breux seuils et paramètres, tels que ceux requis par lescritères de fusion ou division, et ceux employés par lescritères d’arrêt de l’analyse itérative. L’ajustement de ces

paramètres est délicat, de telle sorte qu’il est difficile deprévoir si on aboutira à une sous-segmentation ou à unesur-segmentation de l’image [6].Ces limites ont conduit de nombreux auteurs à s’intéresserà l’analyse de la distribution des points-couleur représen-tant les pixels dans un espace couleur.
3.2 Analyse dans un espace couleur
Les méthodes qui analysent la distribution des points-couleur dans un espace couleur considèrent que chaquepixel � est représenté par un point-couleur ��� � dansl’espace couleur. Les points-couleur peuvent être représen-tés dans des espaces couleur autres que l’espace ��� ���.La performance d’un algorithme de segmentation dépendalors du choix de l’espace couleur [12]. De nombreuxauteurs ont tenté de déterminer les espaces couleur quisont les mieux adaptés à leurs problèmes spécifiques desegmentation d’images couleur [13]. Malheureusement, iln’existe pas un espace couleur qui permet d’obtenir des ré-sultats satisfaisants pour la segmentation de tous les typesd’images [14].
Analyse de la distribution couleur. Les méthodes quianalysent la distribution des points-couleur représentant lespixels supposent que les régions homogènes de l’imagedonnent naissance à des nuages de points-couleur iden-tifiables dans l’espace couleur considéré, chaque nuagedéfinissant une classe de pixels qui partagent des propriétéscolorimétriques similaires. Ces méthodes recherchent desgroupements de points-couleur dans l’espace couleur con-sidéré afin de construire des classes de pixels. Il s’agit doncde méthodes de classification automatique.La figure 4 montre que les points-couleur associés aux ré-gions dont les couleurs sont distinctes forment des nuagesidentifiables dans l’espace ��� ���. Elle montre égale-ment le cas, qui n’a rien d’exceptionnel, des deux disquesverts concentriques où les points-couleur associés à cesdeux régions adjacentes donnent naissance à deux nuagesqui se chevauchent dans l’espace ��� ���, ce qui renddifficile leur discrimination.Les classes de pixels sont construites par des méthodesliées à une approche métrique [15, 16, 17, 18, 19, 20] oupar des méthodes relatives à une approche statistique [21,22, 23, 24, 25]. Quand les classes sont construites, chaquepixel est assigné à l’une d’entre elles par une règle de dé-cision. Les étiquettes des régions sont affectées aux pix-els connexes assignés aux mêmes classes afin de construirel’image segmentée.Les méthodes liées à une approche métrique détermi-nent les centres de gravité des classes, notamment enminimisant des critères permettant d’évaluer la disper-sion et la compacité des classes. Ces méthodes donnentgénéralement de bons résultats quand les nuages forméspar les points-couleur sont globulaires et bien séparés dansl’espace couleur. Les pixels sont assignés aux classes encomparant des distances qui séparent leurs points-couleurdes centres des classes dans l’espace couleur. La plupart de
ces méthodes analysent globalement l’image et nécessitentsoit de connaître au préalable le nombre de classes, soitsi celui-ci est inconnu, de régler finement des paramètresafin de déterminer le nombre de classes en présence dansla population des pixels.
Analyse de l’histogramme couleur. Les méthodes rela-tives à une approche statistique construisent les classes parune analyse de l’histogramme couleur ���� d’une image �.L’image est associée à une modélisation probabiliste dontl’histogramme couleur représente l’estimation de la loi dedensité de probabilité d’apparition des couleurs des pixels.L’histogramme couleur est implanté sous la forme d’unestructure tri-dimensionnelle de cellules repérées par lestrois coordonnées des points-couleur considérés. Chaquecellule������� associée au point-couleur � indique le nom-bre de pixels dans l’image caractérisés par ce point-couleurdivisé par la taille de l’image, notée � � � .Son analyse permet de mettre en évidence des domainesde l’espace dits "modaux", à savoir des zones de fortesconcentrations de points-couleur. Ces domaines sont sé-parés par des "vallées", caractérisées par de faibles con-centrations de points-couleur. Ces méthodes supposentque chaque domaine modal définit une classe de pixels.Ainsi, la construction des classes revient à détecter les do-maines modaux de l’espace couleur. Ces méthodes sontadaptées aux cas où les classes de pixels sont relative-ment équiprobables. Par conséquent, comme les régionsde petite taille sont peu représentées par les cellules del’histogramme couleur, les modes auxquels elles donnentnaissance risquent de ne pas être détectés par une analysede l’histogramme couleur (voir figure 5).Comme l’histogramme couleur est une structure très en-combrante en termes de place mémoire, une solution con-siste à projeter l’histogramme couleur sur les trois com-posantes afin de constituer les trois histogrammes mono-dimensionnels � ���� des images de composante � �, � ��� ��. Dans ce cas, les domaines modaux de l’espacesont supposés être des parallélépipèdes rectangles, dontles projections sur les composantes couleur constituent desintervalles modaux. Les intervalles modaux sur chaquecomposante sont détectés par une recherche des pics del’histogramme mono-dimensionnel correspondant.Un pic d’un histogramme mono-dimensionnel peut con-tenir les niveaux des pixels provenant de plusieurs régionsdifférentes de l’image (voir figure 6). Les pixels de chaquerégion doivent être regroupés en une classe spécifique depixels, définie par un domaine modal de l’espace couleur.Par conséquent, les méthodes de détection des domainesmodaux traitent le cas où un intervalle représentant un picd’un histogramme mono-dimensionnel contient les inter-valles modaux de plusieurs domaines modaux.Lorsque sont retrouvés les intervalles représentant lespics de chaque histogramme mono-dimensionnel, l’espacecouleur est alors partitionné en parallélépipèdes rectanglesgrâce au produit cartésien de ces intervalles. Une analysede la population des pixels dont les points-couleur se trou-

vent dans ces parallélépipèdes permet d’identifier les do-maines modaux de l’espace couleur (voir figure 7).L’approche par classification de pixels est efficace lorsqueles nuages de points-couleur représentatifs des régions sontbien séparés dans l’espace couleur. C’est généralement lecas lorsque les images sont constituées d’un faible nombrede régions ayant des couleurs bien différenciées. Cepen-dant, pour certaines images, le nombre de régions est élevéet leurs couleurs sont proches les unes des autres. Les nu-ages de points se chevauchent alors dans l’espace couleur,ce qui limite les performances de ces méthodes de classifi-cation automatique.Par ailleurs, nous pouvons reprocher aux méthodes de clas-sification de privilégier les propriétés colorimétriques despixels par rapport à leurs propriétés spatiales. En effet,elles ne sont pas prises en compte assez tôt dans le proces-sus de segmentation et n’interviennent que dans un deux-ième temps afin de reconstruire les régions en recherchantdes sous-ensembles de pixels connexes appartenant auxmêmes classes. Ainsi, lors de la classification, le contextespatial est négligé et des nuages de points-couleur dansl’espace couleur peuvent ne pas correspondre à des régionssignificatives dans l’image analysée.
Classification spatio-colorimétrique. La prise encompte simultanée des propriétés colorimétriques despixels et de l’arrangement spatial dans l’image des pixelsayant des couleurs similaires constitue donc une démarchenaturelle pour construire les classes de pixels de tellesorte qu’elles correspondent effectivement aux régions del’image.Pourtant, peu de travaux introduisent l’informationspatiale locale dès le début de la classification[7]. Parmi ceux-ci, les méthodes de construction desclasses proposées par Orchard, Balasubramanian min-imisent la somme des distances euclidiennes entre lespoints-couleur représentant les pixels et les centresdes classes auxquelles ils sont assignés, pondérées parune fonction qui dépend de la norme d’un gradientcouleur [26, 27]. Les auteurs supposent que plus lescouleurs d’une région constituée de pixels connexesassignés à une même classe sont homogènes, plus le poidsde la distance associée à cette classe est faible.Deng et Manjunath contournent le problème de la con-struction des classes en divisant le processus de segmen-tation en deux étapes successives. La quantification descouleurs servant exclusivement à l’analyse des propriétéscolorimétriques des pixels est suivie d’une analyse spatialede l’image [28]. L’originalité de cette approche appeléeJSEG, concerne principalement l’analyse spatiale basée surun nouveau critère utilisé pour juger la qualité d’une seg-mentation.Cheng et al. proposent d’analyser une mesured’homogénéité des niveaux de chaque composante couleurpour construire les classes de pixels de chacune des troisimages de composante [29, 30]. Cette procédure néglige lecaractère multi-dimensionnel de l’information couleur et
fournit souvent des images sur-segmentées. Les régionsdoivent alors être fusionnées à l’aide de l’analyse d’ungraphe d’adjacence de régions. Cette approche très intéres-sante est sensible à l’ajustement des nombreux paramètresdont dépend le résultat.Comaniciu et Meer proposent de construire les classesde pixels par détection des modes dans l’espace couleur[31]. Cette détection est basée sur la méthode du "Mean-Shift" qui analyse l’estimation du gradient de la densité deprobabilité d’apparition des couleurs dans l’image. Cetteestimation est effectuée conjointement dans des domainesspatiaux et colorimétriques afin de déterminer des classesqui correspondent effectivement aux régions. La qualité dela construction des classes de pixels dépend des tailles desdomaines utilisés.
3.3 Méthodes de croissance de régions et defusion de régions
Ces méthodes structurent l’image en régions qui vontévoluer soit par agglomération des pixels aux régions, soiten fusionnant les régions.La croissance de régions agglomère des pixels aux régionsen respectant des critères d’homogénéité en couleur et deforme [32] .Les méthodes de fusion de régions partent d’une sur-segmentation obtenue par exemple par ligne de partage deseaux et affinent cette segmentation. Le problème est dedéfinir un critère de fusion et un ordre dans les fusions. Laméthode par ligne de partage des eaux se calcule sur uneimage des normes de gradient couleur (voir §2).Segmentation multi-échelle. Le principe proposé par L.Guigues [33] est de fusionner les régions 2 à 2, en choisis-sant le couple qui minimise une énergie globale. On arrêtequand on a tout fusionné et on conserve toute la hiérarchiedes couples fusionnés.L’énergie est la somme de deux termes : une énergie in-terne d’attache aux données et une énergie sur les fron-tières. L’échelle est définie par le paramètre de pondération� entre les deux termes (cf. Eq.1).
�� ����
������ � � ��� ���� (1)
Différents modèles sont possilbles pour l’énergie interne etcelles des frontières.Pour l’énergie interne, la plus basique est celle qui sup-pose les régions constantes, elle a été initialement pro-posée par Mumford et Shah [34]. On peut égalementmodéliser l’énergie de chaque région par une gaussienne.Pour l’énergie des frontières, Mumford et Shah utilisent lalongueur totale des frontières entre régions.Soit � une région comportant � pixels notés ��� � ��� ���� � et soit � la matrice de variance/covariance des ��.Dans le cas d’une énergie constante sur chaque région(égale à ��, la distance en norme �� s’écrit : ���� ���
���
��� � ��� � �� trace�� �

Si on utilise un modèle gaussien de dimension 3 (pourchacune des trois composantes couleur), l’énergie s’écrit
: ��� � � ����� � � ������
������ où les �� sont les
valeurs propres de � .D’autres formes d’énergie interne peuvent également être
employées : � � � �� , ������ � � �
�����
��� ou
� ��� � �
�����
���
En ce qui concerne l’énergie des frontières, elle est cal-culée comme la somme sur toutes les régions d’une énergiequi peut être simplement la longueur du contour. Guiguesa proposé d’autres énergies, calculées sur une approxima-tion polygonale du contour telles que le nombre de côtés dupolygone, la concavité (somme des modules des angles) oula cohérence des directions des côtés adjacents. Il a égale-ment proposé de prendre en compte le gradient le long desfrontières.Segmentation floue. Cette méthode conduit à une segmen-tation grossière en régions modélisées par des ensemblesflous[35]. Le but est d’extraire des zones de même couleur,qui peuvent se chevaucher et dont les contours sont impré-cis.L’algorithme démarre sur une segmentation obtenue parligne de partage des eaux. Les points de normes du gradientcouleur minimales constituent les germes des régions. Leslignes de fort gradient seront considérées comme des bar-rages, difficiles à franchir. Puis les degrés d’appartenanceaux régions sont calculés sur un double critère de proxim-ité spatiale et de différence de gradient avec les germes desrégions. Les régions floues se calent ainsi sur les zones defort gradient, mais elles peuvent contourner un bruit im-pulsionnel. Quand il n’y a pas de gradient couleur franc,les régions s’étalent et plusieurs régions peuvent ainsi sechevaucher.
4 Evaluation quantitative d’une seg-mentation
On trouvera dans [36] un catalogue des critères quantitat-ifs permettant de comparer des résultats de segmentation,qu’ils soient sous forme de contours ou de régions. Nousnous focaliserons sur l’évaluation des résultats de segmen-tation en régions, quand on ne dispose pas de segmentationde référence (ou vérité-terrain).De nombreux critères ont été proposés, cherchant à quan-tifier la qualité ou la lisibilité de l’imageCes critères recherchent l’uniformité en intensité ou encouleur à l’intérieur des régions, un grand contraste en-tre les régions. Le niveau de résolution est mesuré par lenombre de régions ou leur taille. Tous le critères définisci-dessous doivent donc être faibles.Soit � une image segmentée en � régions notées � �� � ��� ���� � . �� est le nombre de pixels de la région �� et � lenombre total de pixels de l’image � �
���.
Critère d’uniformité intra-région de Levine et Nazif[37]Ce critère simple est la somme des variances des régions.
�
���
��
��
Mesure de dissimilarité de Liu et Yang [38]Ce critère est basé sur le nombre de régions, l’aire des ré-gions et la couleur moyenne, dans l’espace RGB :
�
������
��
�����
������
(2)
où �� est la somme des distances euclidiennes entre lesvecteurs couleur des pixels de la région � � et le vecteurcouleur attribué à la région �� dans l’image segmentée (engénéral la moyenne des couleurs de la région).Le terme
�� pénalise la sur-segmentation, ainsi que les
aires des régions au dénominateur. Il est assez proche decelui de Levine et Nazif, le calcul des écarts à la moyenneest légèrement différent, ainsi que la normalisation, maisl’idée générale reste la même.Critère de Borsotti [39]La mesure de dissimilarité de Liu et Yang pénalise les seg-mentations contenant trop de régions ou avec des régionsnon homogènes en couleur.Borsotti �! �"� ont proposé de l’améliorer par :
�
�������
��
�����
����
� � � ���������
�
��
�
� (3)
où ����� est le nombre de régions ayant une aire égale à���
Le premier terme de la somme favorise les régions ho-mogènes, comme le critère de Liu et Yang. Le deuxièmeterme a une valeur élevée quand il y a beaucoup de pe-tites régions, ce qui pénalise les images sur-segmentées enbeaucoup de régions de même taille.D’après les auteurs [39], ce critère a fourni sur 500 imagesun classement des segmentations plus conformes à notreappréciation visuelle que le critères de Liu et Yang.Remarque : La distance euclidienne employée dans lescritères de Liu et Yang et de Borsotti peut être remplacéepar une distance ��.Critères énergétiques de GuiguesLes énergies employées par Guigues comme critères de fu-sion 3.3 peuvent également être utilisées comme critèresd’évaluation, en fonction de la résolution recherchée parl’utilisateur.C’est ainsi que la famille d’énergies �� (cf Eq 1) pour lesénergies internes �, , etc. définies ci-dessus fournissentd’excellents critères. On notera que l’énergie interne � estégale au terme ��� des Eq 3 et 2.

En ce qui concerne l’énergie des frontières, on prendra sim-plement la somme des longueurs des frontières des régions.Le critère s’écrit :
# ��
$
�����
������ � � � �
�
�����
����� (4)
où � est un paramètre d’échelle. C’est de lui que dépend leniveau de détail de la segmentation.Les coefficients $ et � sont des coefficients de normali-sation. Pour des images codées sur �% valeurs par com-posante, %� est un majorant des valeurs de variance et decovariance. Par conséquent :
� � � et$ � %� � ���� ��� pour l’énergie �$ � %� � ���� ����� pour l’énergie �$ � � pour l’énergie
(5)
Dans le cas où l’on prend� pour énergie interne, l’énergieglobale n’est autre que celle de Mumford et Shah. Destests sur différentes images ont montré que c’est elle quiordonne les images résultats de la manière la plus conformeà un classement visuel.
5 Evaluation quantitative de la qual-ité d’une image segmentée
Comme il est difficile d’estimer visuellement la qualité derésultats d’une procédure de segmentation, nous proposonsd’utiliser des critères quantitatifs [40]. En l’absence d’une”vérité-terrain” (segmentation de référence), il existe assezpeu de critères quantitatifs permettant de comparer des ré-sultats de segmentation [36].Le premier critère utilisé, noté �, est le nombre de ré-gions reconstruites constituant l’image segmentée. Le sec-ond critère, noté ��, est la moyenne des carrés des dis-tances euclidiennes séparant les points-couleur représen-tant les pixels des centres des classes auxquelles ils ont étéassignés. Comme ce critère, nommé écart quadratique, re-flète la compacité des classes, il constitue l’un des critèresles plus utilisés pour évaluer la qualité des résultats desprocédures de classification. Cependant, ce critère souf-fre d’un gros inconvénient pour l’évaluation de la qualitédes résultats de segmentation car il ne tient pas compte despropriétés spatiales des régions reconstruites.Aussi, nous proposons d’utiliser également le critère pro-posé par Borsotti, noté �, qui est spécifiquement conçupour l’évaluation de la qualité des résultats de segmenta-tion d’images couleur et qui s’exprime de la manière suiv-ante [39]:
� �
��
� � ��
�����
���
�
� � � ������A��
��
�
��
(6)
où
� � � � indique la taille de l’image,
� � correspond au nombre de régions reconstruites del’image segmentée,
� �� est la surface de la � région reconstruite��,
� ����� est le nombre de régions reconstruites de sur-face ��,
� &����� est la surface de la plus grande région re-construite de l’image segmentée,
� ��
� est la somme des carrés des distances euclidiennesséparant le point-couleur représentant chaque pixel de�� du centre des points-couleur représentatifs des pix-els de ��. Cette valeur est également d’autant plusélevée que les régions sont petites.
Plus la valeur du critère � est faible et plus le résultat de lasegmentation est considéré comme étant satisfaisant.Ce critère est le produit de trois termes :
� �
���est un coefficient de normalisation nécessaire
pour s’affranchir de la taille de l’image analysée,
� �� permet de pénaliser les images sur-segmentées,
� la somme se décompose en deux termes. Le premièrprend une valeur élevée soit lorsque les régions recon-struites sont constituées de pixels dont les couleursne sont pas homogènes, soit lorsque le nombre depetites régions reconstruites est élevé. Le deuxièmeprend une valeur élevée lorsqu’il y a beaucoup de ré-gions reconstruites de mêmes surfaces. Il est d’autrepart d’autant plus élevé que les régions reconstruitessont petites, comme c’est le cas dans une image sur-segmentée.
References[1] J. P. Cocquerez et S. Phillip-Foliguet. Analyse
d’images : filtrage et segmentation. Masson, 1990.
[2] P. Lambert et T. Carron. Symbolic fusion ofluminance-hue-chroma features for region segmenta-tion. Pattern Recognition, 32(11):1857–1872, 1999.
[3] S. Di Zenzo. A note on the gradient of multi-image.Computer Vision Graphics and Image Processing,33:116–125, 1986.
[4] H. C. Lee et D. Cok. Detection boundaries in a vectorfield. IEEE Trans. on Signal Processing, 39(5), 1991.
[5] S. Zucker. Region growing : childhood and adoles-cence. Computer Vision Graphics and Image Pro-cessing, 5:382–399, 1976.
[6] P. Lambert et L. Macaire. Filtering and segmentation :the specificity of color images (keynote). Dans Proc.of the Int. Conf. on Color in Graphics and Image Pro-cessing, volume 1, pages 57–64, Saint-Etienne, 2000.

[7] H. D. Cheng, X. H. Jiang, Y Sun, et J. Wang. Colorimage segmentation: advances and prospects. PatternRecognition, 34(12):2259–2281, 2001.
[8] V. Coutance. La couleur en vision par ordinateur.Application à la robotique. Thèse de doctorat, Uni-versité Paul Sabatier de Toulouse, janvier 1991.
[9] A. Trémeau et N. Borel. A region growing and merg-ing algorithm to color segmentation. Pattern Recog-nition, 30(7):1191–1203, 1997.
[10] L. Shafarenko et M. Petrou. Automatic watershedsegmentation of randomly textured color images.IEEE Trans. on Image Processing, 6(11):1530–1543,1997.
[11] A. Trémeau et P. Colantoni. Region adjacency graphapplied to color image segmentation. IEEE Trans. onImage Processing, 9(4):735–744, 2000.
[12] N. Vandenbroucke, L. Macaire, et J. G. Postaire.Color image segmentation by pixel classification inan adapted hybrid color space. Application to soccerimage analysis. Computer Vision and Image Under-standing, 90(2):190–216, 2003.
[13] J. H. Lee, B. H. Chang, et S. D. Kim. Comparison ofcolour transformations for image segmentation. Elec-tronics Letters, 30(20):1660–1661, 1994.
[14] N. Vandenbroucke, L. Macaire, et J. G. Postaire.Color pixels classification in an hybrid color space.Dans Proc. of the IEEE Int. Conf. on Image Process-ing, volume 1, pages 176–180, Chicago (USA), 1998.
[15] M. A. Ismail et M. S. Kamel. Multidimensional dataclustering utilizing hybrid search strategies. PatternRecognition, 22(1):75–89, 1989.
[16] K. Takahashi, H. Nakatani, et K. Abe. Color imagesegmentation using isodata clustering method. DansProc. of the � � Asian Conf. on Computer Vision, vol-ume 1, pages 523–527, Singapore, 1995.
[17] T. Uchiyama et M. A. Arbib. Color imagesegmentation using competitive learning. IEEETrans. on Pattern Analysis and Machine Intelligence,16(12):1197–1206, 1994.
[18] P. Scheunders. A genetic c-means clustering algo-rithm applied to color image quantization. PatternRecognition, 30(6):859–866, 1997.
[19] T.D. Pham et H. Yan. Color image segmentation us-ing fuzzy integral and mountain clustering. FuzzySets and Systems, 107(2):121–130, 1999.
[20] T.Q. Chen et Y. Lu. Color image segmentation: an in-novative approach. Pattern Recognition, 35(2):395–405, 2002.
[21] Y. I. Ohta, T. Kanade, et T. Sakai. Color informationfor region segmentation. Computer Graphics and Im-age Processing, 13:222–241, 1980.
[22] S. Tominaga. Color classification of natural color im-ages. Color Research and Application, 17(4):230–239, 1992.
[23] L. Shafarenko, M. Petrou, et J. V. Kittler. Histogrambased segmentation in a perceptually uniform colorspace. IEEE Trans. on Image Processing, 7(9):1354–1358, 1998.
[24] S. H. Park, I. D. Yun, et S. U. Lee. Color image seg-mentation based on 3D clustering: morphological ap-proach. Pattern Recognition, 31(8):1061–1076, 1998.
[25] A. Gillet, L. Macaire, C. Botte-Lecocq, et J. G.Postaire. chapitre "Color image segmentation byanalysis of 3D histogram with fuzzy morphologi-cal filters", pages 154–177. Springer-Verlag Editor,2002.
[26] M. T. Orchard et C. A. Bouman. Color quantiza-tion of images. IEEE Trans. on Signal Processing,39(12):2677–2690, 1991.
[27] R. Balasubramanian, J. P. Allebach, et C. A. Bouman.Color-image quantization with use of a fast binarysplitting technique. Journal of Optical Society ofAmerica, 11(11):2777–2786, 1994.
[28] Y. Deng, , et B.S. Manjunath. Unsupervised segmen-tation of color-texture regions in images and video.IEEE Trans. on Pattern Analysis and Machine Intel-ligence, 23(8):800–810, 2001.
[29] H. D. Cheng, X.H. Jiang, et J. Wang. Color imagesegmentation based on homogram thresholding andregion merging. Pattern Recognition, 35(2):373–393,2002.
[30] H. D. Cheng et J. Li. Fuzzy homogeneity and scale-space approach to color image segmentation. PatternRecognition, 36(2):1545–1562, 2003.
[31] D. Comaniciu et P. Meer. Mean shift: a ro-bust approach toward feature space analysis. IEEETrans. on Pattern Analysis and Machine Intelligence,24(5):603–619, 2002.
[32] J.M. Chassery et C. Garbay. An iterative segmenta-tion method based on a contextual color and shapecriterion. IEEE Trans. on Pattern Analysis and Ma-chine Intelligence, 6(6):794–800, 1984.
[33] L. Guigues. Modèles multi-échelles pour la segmen-tation d’images. Thèse de doctorat, Université deCergy-Pontoise, 2003.

[34] D. Mumford et J. Shah. Optimal approximations bypiecewise smooth functions and asociated variationalproblems. Comm. Pure Appl. Math., 42:577–685,1989.
[35] M. Sanfourche S. Philipp-Foliguet, M. B. Vieira.Fuzzy segmentation of color images and indexing offuzzy regions. Dans First Europ. conf. on Colourin Graphics, Imaging and Vision, pages 507–512,Poitiers, France, 2002.
[36] S. Philipp-Foliguet. Evaluation de méthodes de seg-mentation d’images couleur. Dans Actes de l’Ecole deprintemps du GDR ISIS Operation Imagerie Couleur,Pau, avril 2001.
[37] M.D. Levine et A.M. Nazif. Dynamic measurementof computer generated image segmentations. IEEETrans. on PAMI, 7(25):155–164, 1985.
[38] J. Liu et Y.-H. Yang. Multiresolution color image seg-mentation. IEEE Trans. on Pattern Analysis and Ma-chine Intelligence, 16(7):689–700, 1994.
[39] M. Borsotti, P. Campadelli, et R. Schettini. Quanti-tative evaluation of color image segmentation results.Pattern Recognition Letters, 19(8):741–747, 1998.
[40] Y.J. Zhang. A survey of evaluation methods for im-age segmentation. Pattern Recognition, 29(8):1335–1346, 1996.


��
��
��
Évaluationgradient
Évaluationgradient
Évaluationgradient
Détectiondes
contours
Détectiondes
contours
Détectiondes
contours
Vecteurgradient R
Vecteurgradient G
Vecteurgradient B
Imagebinaire descontours R
Imagebinaire descontours G
Imagebinaire descontours B
Fusion desimages descontours
Imagebinaire
descontours
Images decomposante
(a)
��
��
��
Évaluationgradient
Évaluationgradient
Évaluationgradient
Vecteurgradient R
Vecteurgradient G
Vecteurgradient B
Évaluationde la norme
d’un gradientcouleur
Normegradientcouleur
Détectiondes contours
Imagebinaire
descontours
Images decomposante
(b)
��
��
��
Évaluationgradient
Évaluationgradient
Évaluationgradient
Vecteurgradient R
Vecteurgradient G
Vecteurgradient B
Évaluationd’un gradient
vectorielcouleur
Vecteurgradientcouleur
Détectiondes contours
Imagebinaire
descontours
Images decomposante
(c)
Figure 1 – Différentes stratégies pour la détection des pixels contours couleur. (a) Analyse des images binaires de contourspour la détection des pixels contours couleur. (b) Analyse de la norme d’un gradient couleur pour la détection des pixels
contours couleur. (c) Analyse d’un gradient vectoriel couleur pour la détection des pixels contours couleur.

0
0
1 2
3 4
1.1 1.2
1.3 1.4
2.1 2.2
2.3 2.4
3.1 3.2
3.3 3.4
4.1 4.2
4.3 4.4
1 2 3 4
1.1 1.2 2.1 2.21.3 1.4 2.3 2.4 3.1 3.2 3.3 3.4 4.1 4.2 4.3 4.4
Figure 2 – Structure pyramidale du tétra-arbre.
(a) (b)
Figure 3 – Graphe d’adjacence de régions.

R1
R4
R2 R3
R5
R6R
R
RR
R
R
(a)
63
127
191
255
63
127
191
255
63
127
191
255
R
G
B
(b)
Figure 4 – Régions homogènes de l’image et nuages de points-couleur dans l’espace couleur.
Occurrences
Figure 5 – Histogramme couleur de l’image de la figure 4(a) qui ne tient compte que des niveaux des composantes et �des pixels. Les petites régions de l’image sont sous-représentées par comparaison aux grandes régions de l’image.

0 32 64 96 128 160 192 224 2550
500
1000
1500
2000
2500
3000
3500
4000
�����,��
������
�
�
���������
(a) .
0 32 64 96 128 160 192 224 2550
500
1000
1500
2000
2500
3000
3500
4000
�����
��
����� �
���������
(b)
0 32 64 96 128 160 192 224 2550
500
1000
1500
2000
2500
3000
3500
4000
������
�
��
�����
�
���������
(c)
Figure 6 – Histogrammes mono-dimensionnels des images de composante issues de l’image couleur de la figure 4(a).

0 32 64 96 128 160 192 224 2550
500
1000
1500
2000
2500
3000
3500
4000
0
3264
96128
160
192
224
255
0500
1000
1500
2000
2500
3000
3500
4000
��
��
��
�
��
��
G
B
�����
��
�����
�
� �����
�
� �
� ����
���������
� � � ��� ���
Figure 7 – Détection des domaines modaux du plan chromatique � ��� par analyse des histogrammes mono-dimensionnelsdes images de composante �� et �� de l’image de la figure 4(a).