Upload
elgueven
View
227
Download
0
Embed Size (px)
Citation preview
8/10/2019 Second Edition International Code Council 2006
1/547
8/10/2019 Second Edition International Code Council 2006
2/547
v
CONTENTS
FOREWORD xi
1. INTRODUCTION 1
2. CHARACTERISTICS OF EARTHQUAKES 7
2.1 Causes of Earthquakes 72.2 Plate Tectonic Theory 82.3 Measures of Earthquakes 10
2.3.1 Magnitude 112.3.2 Intensity 112.3.3 Instrumental Scale 13
2.3.4 Fourier Amplitude Spectrum 152.3.5 Power Spectral Density 152.3.6 Response Spectrum 16
3. LINEAR ELASTIC DYNAMIC ANALYSIS 17
3.1 Introduction 17
3.2 Single Degree of Freedom System 17
3.2.1 System Formulation 173.2.2 Response Spectrum of Elastic Systems 203.2.3 Design Response Spectrum 24
3.3 Generalized Single Degree of Freedom 27
3.4 Multiple Degrees of Freedom System (MDOF) 35
3.4.1 Multiple Degrees of Freedom System in
2-D Analysis 353.4.2 Multiple Degrees of Freedom System in
3-D Analysis 633.5 Shear Beam 77
3.6 Cantilever Flexure Beam 85
3.7 Simple Flexure Beam 92
3.8 Axial Beam 95
3.9 Finite Element Methods 96
3.9.1 Finite Element Concept in Structural Engineering 973.9.2 Stiffness Matrix (Virtual Work Approach) 983.9.3 Mass Matrix (Galerkin Approach) 1023.9.4 Other Matrices 1053.9.5 Mass Matrix in 2-D 1063.9.6 Application of Consistent Mass Matrix 107
3.10 Incoherence 108
Problems 116
8/10/2019 Second Edition International Code Council 2006
3/547
vi
4. NONLINEAR AND INELASTIC DYNAMIC ANALYSIS 123
4.1 Introduction 123
4.2 Single Degree of Freedom System 125
4.3 Numerical Methods 126
4.3.1 Central Differences Method 1264.3.2 Newmark- Methods 128
4.3.3 Wilson- Method 1294.4 Multiple Degrees of Freedom System 135
4.5 Equivalent Linearization 145
Problems 151
5. BEHAVIOR OF STRUCTURES UNDER SEISMIC
EXCITATION 153
5.1 Introduction 153
5.1.1 Force Reduction Factor, R 1545.1.2 Ductility 1555.1.3 Energy Dissipation Capacity 1575.1.4 Self-Centering Capacity 1585.1.5 Frequency Shift 158
5.2 Relationship Between Force Reductionand Ductility Demand 159
5.2.1 Equal Displacement Criterion 1605.2.2 Equal Energy Criterion 160
5.2.3 General Relationship Between Rand d 1615.3 Relationship Between Global Ductility and
Local Ductility 168
5.4 Local Ductility Capacity 170
5.5 Evaluation of Monotonic Local Ductility Capacity 170
5.5.1 Monotonic Behavior of Concrete 170
5.5.2 Monotonic Behavior of Steel 1725.5.3 Idealized Strain Compatibility Analysis 1735.5.4 General Strain Compatibility Analysis 185
5.6 Evaluation of Cyclic Local Ductility Capacity 192
5.6.1 Cyclic Behavior of Concrete 1925.6.2 Cyclic Behavior of Steel 1935.6.3 Cyclic Strain Compatibility Analysis 194
5.7 Precast Concrete Structures 195
5.8 Effect of Structure Configuration on Ductility 197
5.9 Second Order Effect on Ductility 198
5.10 Undesirable Hysteretic Behavior 198
5.11 Effect of Axial Load on Hysteretic Behavior 200
5.11.1 Rigid Bar Idealization 201
5.11.2 Energy Dissipation Factor ( N) 2055.12 Design Considerations 207
5.13 Capacity Design 209
8/10/2019 Second Edition International Code Council 2006
4/547
vii
5.14 Pushover Analysis 212
5.15 Recommended Versus Undesirable StructuralSystems 213
5.16 Strain Rate 215Problems 217
6. DESIGN OF EARTHQUAKE-RESISTANT BUILDINGS (ICC) 223
6.1 Introduction 223
6.2 Definition of Structural Components 224
6.3 Seismic Design Category 226
6.4 Zoning Classification 227
6.5 Response Spectra 228
6.6 Design Requirements of Seismic Design Categories 229
6.7 Earthquake-Induced Forces 230
6.7.1 Regularity of Structures 232
6.7.2 Simplified Lateral Force Analysis Procedure 2346.7.3 Equivalent Lateral Force Procedure 2406.7.4 Modal Response Spectrum Analysis 2476.7.5 Time-History Analysis 2576.7.6 Directional Effect 262
6.8 Load Combinations 265
6.9 Definitions and Requirements of Structural Systems 276
6.10 Special Topics 276
6.10.1 Diaphragm Design Forces 2766.10.2 Torsional Effect 2776.10.3 Drift Limitations 2776.10.4 Building Separation 278
6.10.5 P- Effect 279
Appendix 6-1:Tables 280
7. SEISMIC PROVISIONS OF REINFORCED CONCRETESTRUCTURES (ACI 318) 285
7.1 Introduction 285
7.2 Ordinary Moment Frames (OMF) 286
7.2.1 Ordinary Beams 2867.2.2 Ordinary Beam-Columns 295
7.3 Intermediate Moment Frames (IMF) 309
7.3.1 Intermediate Beams 3097.3.2 Intermediate Beam-Columns 311
7.4 Special Moment Frames (SMF) 321
7.4.1 Special Beams 323
7.4.2 Special Beam-Columns 3267.4.3 Special Joints 331
7.5 Ordinary Shear Walls (OSW) 343
8/10/2019 Second Edition International Code Council 2006
5/547
viii
7.6 Special Shear Walls (SSW) 355
7.6.1 Special Shear Walls without Openings 3567.6.2 Special Shear Walls with Openings 366
7.7 Coupling Beams 368
7.8 Diaphragms and Trusses 3707.9 Foundations 373
7.10 Precast Concrete 374
7.10.1 Precast Special Moment Frames 3757.10.2 Precast Intermediate Shear Walls 3767.10.3 Precast Special Shear Walls 377
7.11 Nonseismic-Resisting Systems 377
Appendix 7-1:Design Charts 380
8. INTRODUCTION TO THE AISCSEISMIC PROVISIONSFOR STRUCTURAL STEEL BUILDINGS 389
8.1 Introduction 389
8.2 General Requirements 390
8.3 Structural Systems 392
8.3.1 Ordinary Moment Frames (OMF) 3928.3.2 Intermediate Moment Frames (IMF) 3938.3.3 Special Moment Frames (SMF) 3948.3.4 Special Truss Moment Frames (STMF) 3968.3.5 Ordinary Concentrically Braced Frames (OCBF) 3988.3.6 Special Concentrically Braced Frames (SCBF) 3998.3.7 Eccentrically Braced Frames (EBF) 401
8.4. Allowable Stress Design Approach 405
Appendix 8-1:Tables 407
9. DESIGN OF EARTHQUAKE-RESISTANT BRIDGES(AASHTO CODE) 409
9.1 Introduction 409
9.2 AASHTO Procedures for Bridge Design 411
9.3 Response Spectra 413
9.4 Single-Span Bridges 415
9.5 Bridges in Seismic Zone 1 415
9.6 Bridges in Seismic Zone 2 417
9.7 Bridges in Seismic Zones 3 and 4 417
9.8 Methods of Analysis 418
9.8.1 Uniform Load Method 4199.8.1.1 Continuous Bridges 4199.8.1.2 Discontinuous Bridges 429
9.8.2 Single-Mode Spectral Method 430
9.8.2.1 Continuous Bridges 4309.8.2.2 Sinusoidal Method for Continuous Bridges 438
8/10/2019 Second Edition International Code Council 2006
6/547
ix
9.8.2.3 Discontinuous Bridges 4439.8.2.4 Rigid Deck Method for
Discontinuous Bridges 4489.8.3 Multiple Mode Spectral Method 4559.8.4 Time History Method 4569.8.5 Directional Effect 457
9.9 Load Combinations 457
9.10 Design Requirements 458
9.11 Design Requirements of Reinforced ConcreteBeam-Columns 459
9.11.1 Bridges in Seismic Zone 1 4599.11.2 Bridges in Seismic Zone 2 4609.11.3 Bridges in Seismic Zones 3 and 4 464
9.12 Design Requirements of Reinforced ConcretePier Walls 465
9.13 Special Topics 467
9.13.1 Displacement Requirements (Seismic Seats) 467
9.13.2 Longitudinal Restrainers 4689.13.3 Hold-Down Devices 4689.13.4 Liquefaction 468
10. GEOTECHNICAL ASPECTS AND FOUNDATIONS 469
10.1 Introduction 469
10.2 Wave Propagation 470
10.3 Ground Response 472
10.4 Liquefaction 474
10.5 Slope Stability 478
10.6 Lateral Earth Pressure 479
10.7 Foundations 481
Appendix 10-1:Tables 487
11. SYNTHETIC EARTHQUAKES 491
11.1 Introduction 491
11.2 Fourier Transform 492
11.3 Power Spectral Density 495
11.4 Stationary Random Processes 496
11.5 Random Ground Motion Model 497
11.6 Implementation of Ground Motion Model 503
11.7 Validity of Synthetic Earthquakes 503
8/10/2019 Second Edition International Code Council 2006
7/547
x
12. SEISMIC ISOLATION 509
12.1 Introduction 509
12.2 The Seismic Isolation Concept 510
12.3 Lead-Rubber Bearing Isolator 511
12.4 Analysis of Seismically Isolated Structures 51312.5 Design of Seismically Isolated Structures 513
Appendix 12-1: Design Tables and Charts 523
BIBLIOGRAPHY 525
INDEX 531
UNIT CONVERSION TABLE 537
8/10/2019 Second Edition International Code Council 2006
8/547
xi
FOREWORD
This one of a kind book explains the fundamental concepts of structuraldynamics and earthquake engineering with exceptional clarity and an un-precedented quantity of numerical examples that help the reader fullyunderstand the concepts being discussed.
Professor Armouti has done a phenomenal job of explaining the dif-icult concepts of linear and nonlinear dynamics and structural response toearthquake excitations. The presentation style, simplicity of language,and many examples make these concepts readily understandable even tothose who face them for the first time.
This ideal textbook for teaching a first undergraduate or graduate
course in earthquake engineering not only explains the structural dyn-mics theories necessary for understanding linear and nonlinear responseto earthquake excitations, but also covers the basic design of earthquakeresistant steel and reinforced concrete buildings, bridges and isolatedsystems, in accordance with the latest codes of the United States.
Students will appreciate the wealth of numerical examples presentedfor every small and large issue discussed. Instructors will appreciate thesimplicity of the presentation, the extensive number of solved examplesand the problems contained at the end of the first five chapters. Last, butnot least, engineering practitioners will find this book to be an invaluablesource of information regarding response of various systems andcomponents to earthquake excitations.
When I was first presented with the manuscript of this book by the In-ternational Code Council, the first thought that crossed my mind was: anearthquake engineering book from Jordan for the U.S. market? This initialreaction, however, rapidly faded when I went over the contents and thepresentation of the book. I did strongly recommend publication of thistextbook for the U.S. market. I am very pleased that this unique book isnow available to students and practitioners of earthquake engineering inthis country.
Farzad Naeim, Ph.D., S.E., Esq.President Elect,Earthquake Engineering Research Institute
Vice President and General CounselJohn A. Martin & Associates, Inc.Los Angeles, California
8/10/2019 Second Edition International Code Council 2006
9/547
xii
8/10/2019 Second Edition International Code Council 2006
10/547
1
1
INTRODUCTION
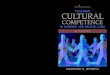
Earthquake engineering is the science that studies the behavior ofstructures under earthquake excitation and provides the rules on how todesign structures to survive seismic shocks. Earthquakes are wild andviolent events that can havedramatic effects on structures. Infact, many structures havecollapsed during earthquakesbecause earthquake-inducedforces or displacements ex-ceeded the ultimate capacity ofthe structures. Therefore, thestudy of structural behavior atfull capacity is a necessary
element of earthquake en-gineering.
Earthquakes are extremely random and oscillatory in nature (as shown inFig. 1-1). Because earthquakes cause structures to largely deform inopposite directions, earthquake en-gineering also requires an under-standing of structural behavior undercyclic loading. Figure 1-2 shows anexample of cyclic loading in theinelastic range. Furthermore, theextreme randomness and uncertainoccurrence of earthquakes also
require the use of a probabilityapproach in the analysis and designof structures that may experienceseismic excitation.
Time, t
FIGURE 1-1
EARTHQUAKE RECORD
Acceleration,
FIGURE 1-2
CYCLIC BEHAVIOR
StructureCyclic
Loading
Fy
F
HysteresisLoo
8/10/2019 Second Edition International Code Council 2006
11/547
Chapter One
2
The civil engineering field is basically distinguished by two designphilosophies: elastic design and plastic (inelastic) design. In the elasticdesign philosophy, structures are designed to remain elastic, and nointernal force redistribution is permitted during the lifetime of the structure.Elastic design can be characterized by its reversibility: the uniqueness
between stress-strain or load-displacement (F- ) relationships and whetherthose relationships are linear or nonlinear, as seen in Figure 1-3 (a) and(b). This behavior implies the recovery of the work done by the externalloads after their removal. However, in the plastic design philosophy, therelationship between stress and strain or between load and displacement isnot unique. In this philosophy, plastic deformations are defined as thosedeformations that remain permanent after the removal of forces. Suchdeformations result in a hysteresis loop as shown in Figure 1-3 (c). Thisbehavior also implies that dissipation of energy has occurred. In addition,because redistribution of internal forces is permitted, the restoring force(resistance of the structure) depends on both material properties andloading history.
Earthquake-resistant structures can be designed to remain elastic underlarge earthquakes. However, such design requires high strength and, in
(a) Earthquake Loading
t
g
EarthquakeStructure
F
FIGURE 1-4
ELASTIC VS INELASTIC RESPONSE
(b) Elastic Response
F
ElasticStrengthDemand
Fe
e
(c) Inelastic Response
F
ElasticStrengthDemand
Fe
e
Fy
y inel
FIGURE 1-3
ELASTIC VS INELASTIC BEHAVIOR
Unloading
(a) Linear Elastic
F F
Loading
Unloading
(b) Nonlinear Elastic
(c) Inelastic
F HysteresisLoop
Loading
e
Unloading
8/10/2019 Second Edition International Code Council 2006
12/547
Introduction
3
turn, high cost, which might not be economically feasible. As shown inFigure 1-4, and as will be described later, the inelastic response ofstructures under seismic excitation permits them to be designed with astrength less than their elastic strength demand. Experience from previousearthquakes and inelastic dynamic analysis shows that elastic and inelasticdisplacements remain within the same range.
Inelastic dynamic analysis shows that structures with strength less thantheir elastic strength demand can survive earthquake excitation if theypossess enough capacity to deform in the inelastic region. Therefore, werely on inelastic behavior (yielding and ductility) to design structures withstrength less than their elastic strength demand. This implies that designingstructures with strength less than their elastic strength demand imposesrequirements on the structure other than the traditional requirements instructural design. These requirements include good ductility, good energydissipation and good self-centering capacity of the structure.
Therefore, the objective of this book is to provide an understanding of the
behavior of structures under earthquake excitation, the characteristics ofearthquakes and the relationship between the force reduction factor andductility demand. This understanding will provide the knowledge needed torealize the requirements for achieving ductility capacity to meet ductilitydemand and, eventually, for designing cost-effective structures that cansurvive earthquake excitation.
Modern seismic codes have set the following objectives as their ultimategoals of earthquake-resistant design:
1. Prevent nonstructural damagecaused by minor and frequentearthquakes.
2. Prevent structural damage dur-ing moderate and less frequentearthquakes.
3. Prevent collapse of structuresduring major and rare earth-quakes (ultimate goal is toprotect human life).
4. Maintain functionality of es-sential facilities during andafter any earthquake (i.e., hos-pitals, fire departments and po-lice stations). This would alsoinclude lines of transportation(e.g., bridges).
Achieving the first and second objectives in reference to Figure 1-5requires that a minimum stiffness, k, and minimum strength, Fy, be
FIGURE 1-5
SEISMIC DESIGN OBJECTIVES
F
Elastic Strength
DemandFe
e
Fy
y inel
k
Fs
s
Min. Stiffness, k,
to Achieve s
Min. Strengthto Achieve Fy
8/10/2019 Second Edition International Code Council 2006
13/547
Chapter One
4
provided to keep structural response within acceptable performance limits,usually within the elastic range. Although minimum stiffness requirementslimit the elastic deformations needed to achieve objective one (preventnonstructural damage), minimum strength requirements will ensure theachievement of objective two (prevent structural damage). Objectives threeand four are achieved by using the reserved capacity of structures that aredue to the inelastic response of structures.
To achieve these objectives, one must understand structural analysis,structural dynamics, inelastic behavior of structures and earthquakecharacteristics. This book covers these essential areas through detailedanalysis of the characteristics of earthquakes, elastic and inelasticresponse of structures to dynamic loading (earthquake excitation), behaviorof structures under earthquake excitation and design of earthquake-resistant structures.
In addition to the introduction, the contents of this book may be groupedinto four main topics: nature and properties of earthquakes, theory and
analysis, practical application and treatment by seismic codes, andspecial topics. The twelve chapters of the book are organized in a logicalsequence of topics, and therefore, the reader is advised to start the bookwith Chapter 1 and proceed chapter by chapter. To receive the maximumbenefit of this book, it is highly recommended that the basics (Chapters 1through 5) be studied before going to practical applications and specialtopics. Brief description of the main topics and pertinent chapters aregiven in the following paragraphs.
A general introduction to the subject is given in Chapter 1. The natureand characteristics of earthquakes are treated in Chapter 2. Chapter 2does not intend to provide the reader with the geological base of earth-quakes; rather, it intends to provide a basic understanding of earthquakes
necessary for their direct incorporation in the analysis and design ofstructures.
The basic theory and analysis of earthquake engineering from a structuralviewpoint is treated in Chapters 3, 4 and 5. Elastic dynamic analysis istreated in Chapter 3; inelastic dynamic analysis in Chapter 4. Dynamicanalysis and vibration properties of structures subjected to earthquakesonly are treated in these chapters. The behavior of structures underseismic excitation is treated in Chapter 5. The core of modern earthquakeengineering is presented in this chapter. The basic seismic parametersand definitions, such as ductility, energy dissipation and others, are alsogiven in this chapter. Ample figures and examples are included in thesechapters to further illustrate concepts and ideas.
Practical applications and treatment of seismic codes are covered inChapters 6, 7, 8 and 9. Chapter 6 treats seismic provision and design re-quirements of buildings using the 2006 International Building Code
8/10/2019 Second Edition International Code Council 2006
14/547
Introduction
5
(IBC) and includes the ASCE 7-05 Standard as the book reference code
for seismic provisions. Force calculations, drift limitations, selection ofseismic systems, methods of analysis and other pertinent issues arepresented in this chapter. Comprehensive examples are used to illustrateconcepts as deemed necessary.
Chapter 7 treats, in depth, provisions and design of reinforced concretebuildings according to ACI-318. Chapter 7 is used as a model of practicalapplication of seismic design, and hence, comprehensive treatment anddesign of various systems such as types of frames and types of shearwalls are provided. Comprehensive and detailed examples are presentedfor illustration and practice. Chapter 8 introduces seismic provisions ofstructural steel buildings according to AISC seismic provisions. Basicprovisions and identification of systems are illustrated in this chapterwithout giving examples. This chapter intends to give the reader a flavorof the variation of seismic requirements when the material is changed.Masonry and wood structures are not addressed in this book.
Practical applications and treatment of bridges are covered in Chapter 9,which treats seismic provision and design requirements according to the
AASHTO Code. This chapter presents, in detail, the methods used inAASHTO to calculate seismic forces in bridges with comprehensive andillustrative examples. New simplified and efficient methods are alsopresented in this chapter which are based on published developments ofthe author.
The last group of chapters, Chapters 10 through 12, presents specialtopics pertinent to earthquake engineering. Concise presentation ofgeotechnical aspects such as liquefaction and popular problems infoundations pertinent to earthquake effects are presented in Chapter 10.The basis and development of synthetic earthquake records, which are
usually needed in explicit inelastic dynamic analysis, are presented inChapter 11. The modern technique of seismic isolation is covered inChapter 12. Seismic isolation is usually used to alleviate harmful effect ofearthquakes, and to control and protect structures from damage underseismic excitation.
8/10/2019 Second Edition International Code Council 2006
15/547
Chapter One
6
8/10/2019 Second Edition International Code Council 2006
16/547
7
2
CHARACTERISTICSOF EARTHQUAKES
2.1 Causes of Earthquakes
As mentioned in Chapter 1, it is important to understand the nature ofearthquakes in order to understand further their effect on structures andconsequently to develop rational methods of their analysis. However, thisbook does not intend to study earthquakes from the geological point ofview; rather, it intends to highlight their characteristics from an engineeringpoint of view that would be closely related to engineering analysis.Therefore, only a brief introduction will be given on the origin, location andsubjective measurements, such as the Richter and Mercalli scales, ofearthquakes. More attention will be given to their instrumental mea-surements such as acceleration, power spectral density and responsespectrum. Such measurements are directly used to evaluate and analyzethe direct impact of earthquakes on structures.
Earthquakes can occur as the result of activities such as tectonic move-ments, volcanic activities, cave collapses, natural and man-madeexplosions, and the filling of reservoirs. The reservoir-induced Koynaearthquake in India in 1967 resulted in the deaths of about 180 people.The collapse of the World Trade Center towers in New York on September11, 2001, generated an earthquake of 5.2 magnitude on the Richter scale.However, earthquakes can most reliably be explained by tectonicmovements, which generate 90 percent of all earthquake phenomena.
8/10/2019 Second Edition International Code Council 2006
17/547
Chapter Two
8
2.2 Plate Tectonic Theory
The crust of the earth is divided into several large tectonic plates thatsometimes encompass more than one continent. These plates include theEurasian Plate, African Plate, North American Plate, South American Plate,
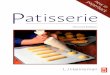
Australian Plate and Pacific Plate, among others. Figure 2-1 shows the
FIGURE 2-1MAJOR TECTONIC PLATES
LEGEND
LAND
PLATEBOUNDARY
PHILIPPINE
PLATE
AUSTRALIAN
PLATE
ANTARCTIC PLATE
EURASIAN
PLATE
AFRICAN
PLATE
ARABIAN
PLATE
INDIANPLATE
NAZCA
PLATE
PACIFIC
PLATE
ANTARCTIC PLATE
JUANDE FUCA
PLATE
COCOS
PLATE
AFRICAN
PLATE
AUSTRALIAN
PLATE
CARIBBEAN
PLATE
SOUTH
AMERICAN
PLATE
NORTH
AMERICANPLATE
EURASIANPLATE
SCOTIA
PLATE
8/10/2019 Second Edition International Code Council 2006
18/547
8/10/2019 Second Edition International Code Council 2006
19/547
Chapter Two
10
Surface waves are classified as Rayleigh waves, R-waves, and Lovewaves or L-waves. The shape of their oscillation is shown in Figure 2-2.
Note that these seismic strain waves travel through random media thatmodify the waves with an infinite number of effects, which include filtering,amplification, attenuation, reflection and refraction. These random mo-difications give each site a different wave profile, making it very difficult topredict the characteristics of an earthquake at a specific site.
The extreme randomness and uncertainty of earthquake characteristicsrequire the use of probabilistic means in the treatment and design of struc-tures. Therefore, the design and survival of structures is also based onprobabilistic consideration of earthquake excitations.
The following sections summarize additional measures that are used to de-scribe earthquakes.
2.3 Measures of Earthquakes
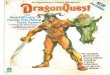
Earthquake measures quantify the size and effect of earthquakes. Thesize of an earthquake is measured by the amount of energy released atthe source, its magnitude, whereas the effect of an earthquake at dif-ferent locations is measured by its intensity at a specific site. Figure 2-3defines the relevant components of an earthquake with its measures atthe source and at any site.
FIGURE 2-3
MEASURES OF EARTHQUAKES
100 km E icentral Distance
FocalDistance
FocalDepth
Site
RichterStation
GroundSurface
MAGNITUDEAt Source
(Richter Scale)Measure ofENERGY
CenterHypocenter
Focus
INTENSITYAt Site
(Modified Mercalli Scale)Measure of
DESTRUCTIVENESS
Epicenter
8/10/2019 Second Edition International Code Council 2006
20/547
Characteristics of Earthquakes
11
2.3.1 Magnitude
The size of an earthquake at its source is known as the magnitude of theearthquake and is measured by the Richter scale. The magnitude, M, isgiven as
M = logAwhere:
A= Amplitude in m measured on a Wood-Anderson type seismometer.The earthquake may be described in general terms according to thevalue of Mas follows:
M= 1 to 2: Earthquake is barely noticeable.M< 5: Earthquake is not expected to cause structural damage.M> 5: Earthquake is expected to cause structural damage.M= 8, 9: Earthquake causes the most structural damage recorded.
Note that ground motion intensity decreases with the distance from focus.Therefore, M does not measure local destructiveness of earthquakes.
The M-value is only an indication of the energy released.
2.3.2 Intensity
Intensity is a subjective measure of the local destructiveness of anearthquake at a given site. Intensity scales are based on human feelingsand observations of the effect of ground motion on natural and man-madeobjects.
The most popular scale of intensity is called the Modified Mercalli scale(MM). This scale is divided into twelve grades (I to XII) as follows:
I. Not felt except under exceptionally favorable circumstances.II. Felt by persons at rest.
III. Felt indoors; may not be recognized as an earthquake.
IV. Windows, dishes and doors disturbed; standing motor cars rocknoticeably.
V. Felt outdoors; sleepers wakened; doors swung.
VI. Felt by all; walking unsteady; windows and dishes broken.
VII. Difficult to stand; noticed by drivers; fall of plaster.
VIII: Steering of motor cars affected; damage to ordinary masonry.
IX. General panic; weak masonry destroyed, ordinary masonryheavily damaged.
X. Most masonry and frame structures destroyed with foundations;rails bent slightly.
8/10/2019 Second Edition International Code Council 2006
21/547
Chapter Two
12
XI. Rails bent greatly; underground pipes broken.
XII. Damage total; objects thrown into the air.
Note that MMdepends on the magnitude of the earthquake and on the
distance between the site and the source. This scale may be expressed asa function of magnitude and distance from the epicenter by the followingexpression:
MM = 8.16+ 1.45M 2.46lnr
where:MM = Modified Mercalli scale intensity grade.M = Earthquake magnitude (Richter scale).R = Distance from epicenter (km).
A plot of this relation is shown in Figure 2-4.
Example 1
A maximum amplitude of 47 inches (1.2 meters) is recorded on a Wood-Anderson seismometer at a standard Richter station. Describe theexpected damage in a city located 99.44 miles (160 km) from theearthquake epicenter.
Solution
(1) Richter scale magnitude
M = logA= log 1.2 x 106= 6.08
(2) Modified Mercalli scale intensity
FIGURE 2-4RELATIONSHIP BETWEEN MAGNITUDE AND SEISMIC INTENSITY
(mile 1.609 km)
Hypocentral Distance, km
Intens
ity,
Mo
dified
Merca
lli,MM
10
8
6
4
210 1000
5 67
8M = 8.5
4
100
8/10/2019 Second Edition International Code Council 2006
22/547
Characteristics of Earthquakes
13
MM = 8.16 + 1.45 M 2.46 lnrMM = 8.16 + 1.45 (6.08) 2.46 ln(160)
MM = 4.5 grade V
Therefore, the damage in the city may be described as grade V accordingto the Modified Mercalli scale: The earthquake was felt outdoors, sleeperswakened and doors swung.
2.3.3 Instrumental Scale
In general, both magnitude and intensity scales of earthquakes are usefulin estimating the size and severity of earthquakes. However, they are notuseful for engineering purposes, especially in structural engineering.Structural engineers need a quantitative measure that can be used inanalysis and design. This measure is provided in an accelerogram, whichis a record of the ground acceleration versus time.
Figure 2-5 shows a sample accelerogram record of the famous El CentroEarthquake that occurred on May 1940, killing nine people and damaging80 percent of the buildings in Imperial, California. The accelerogramcontains important parameters of the earthquake, such as peak groundacceleration (PGA), total duration and length of continuous pulses. Theaccelerogram can be mathematically analyzed to obtain other importantparameters of an earthquake, such as frequency content, peak groundvelocity, peak ground displacement and power spectral density. Ac-celerograms are also used to construct response spectra.
FIGURE 2-5SAMPLE EARTHQUAKE RECORD
0
0.4
- 0.4
ACCELERATION
,g
EL CENTRO EARTHQUAKE
TIME, SECONDS
302010
0.2
- 0.2
8/10/2019 Second Edition International Code Council 2006
23/547
Chapter Two
14
A correlation between the peak ground acceleration and the ModifiedMercalli scale has been observed. Statistical analysis shows that thefollowing approximate relations may be used for estimate purposes.
On the average, PGA (in g) is given as
PGAavg = 0.1x10-2.4+ 0.34MM
A conservative value of PGA (in g) is given as
PGAdesign = 0.1 x 10-1.95+ 0.32MM
Table 2-1 can be used as a guideline to estimate the relationship be-
tween the shown earthquake parameters and its effects.
FOURIERA
MPLITUDE
|F(j
)|,m
/s
0
1
2
3
0 2 4 6 8 10
EL CENTRO EARTHQUAKE
FIGURE 2-6
FOURIER AMPLITUDE SPECTRUM (m 3.28 ft)
FREQUENCY, Hz
8/10/2019 Second Edition International Code Council 2006
24/547
Characteristics of Earthquakes
15
TABLE 2-1APPROXIMATE RELATIONSHIPS BETWEEN PGA, MM, UBC
ZONING, AND IBC ZONING CRITERION
MM PGA (g)UBC
zone (Z)
IBCMapped spectralacceleration at
short period (Ss)
IV < 0.03
V 0.03 0.08
VI 0.08 0.15
1 around 30
VII 0.15 0.25 2 around 75
VIII 0.25 0.45
IX 0.45 0.603 around 115
X 0.60 0.80
XI 0.80 0.90
XII > 0.9
4 around 150
2.3.4 Fourier Amplitude Spectrum
At any time function f(t) can be transformed into its frequency domain asa function of frequency, F(j ), and vice versa using Fourier transform
pairs:
dtetfjF tj
)()(
)(2
1)( dejFtf tj
An earthquake accelerogram is composed of an infinite number ofharmonics. The frequencies of these harmonics, known as frequencycontent, can also be found. The power associated with these frequenciescan also be obtained from Fourier analysis because the power spectraldensity is directly proportional to the square of Fourier Amplitude, |F(j )|.Figure 2-6 shows a Fourier Amplitude Spectrum for the El Centroearthquake. More information on this subject is given in Chapter 12.
2.3.5 Power Spectral Density
The power spectral density, S( ), is another measure of the energy
associated with each frequency contained in the earthquake. Power
spectral density is directly proportional to the square of Fourier amplitudein the following form:
8/10/2019 Second Edition International Code Council 2006
25/547
Chapter Two
16
T
jFS
T 2
|)(|lim)(
2
Power spectral density is widely used in constructing synthetic
earthquakes. Synthetic earthquake records can be used as standardrecords in design, similar to the use of actual earthquake records, asshown in Chapter 12.
2.3.6 Response Spectrum
Response spectrum is the most useful measure of earthquakes forengineers. Response spectrum is a chart that plots the response of asingle degree of freedom (SDOF) oscillator to a specific earthquake. Byvarying the frequency (or the period) and the damping ratio of the system,the maximum structural response quantities can be evaluated in terms ofmaximum displacement, maximum velocity, and maximum acceleration ofthe system. A detailed analysis of response spectrum is provided in thenext chapter. As an example, Figure 2-7 shows a sample responsespectrum of the El Centro earthquake.
The different measurements and characteristics introduced in theprevious sections serve different purposes in the following chapters. Forexample, some earthquake measurements such as acceleration profileand response spectrum are necessary and will be used in the nextchapters to study and quantify the engineering effect of earthquakes onstructures, whereas other measurements such as Fourier spectrum and
power spectral density function are necessary and will be used to ge-nerate synthetic earthquakes as another necessary component foranalysis of structures under seismic excitations.
0
10
20
30
0 1 2 3PERIOD, sec
FIGURE 2-7RESPONSE SPECTRUM (m 3.28 ft)
EL CENTRO EARTHQUAKE
PSEUDO
ACCELERATION
Sa
(m/s2)
= 10%
= 2%
= 5%
8/10/2019 Second Edition International Code Council 2006
26/547
17
3
LINEARELASTIC
DYNAMIC
ANALYSIS
3.1 Introduction
Structural dynamics is a well-established science with a rich
and complete foundation of liter-ature. The objective of this bookis to focus on the aspects of sup-port excitation that are due toearthquakes. For extensive studyon the many other aspects ofstructural dynamics, the readermay refer to any textbook onstructural dynamics.
3.2 Single Degree of FreedomSystem
3.2.1 System Formulation
An idealized single degree of freedom (SDOF) dynamic system is shown inFigure 3-1. The system consists of a concentrated mass, m,subjected to a
Displacement, u
FIGURE 3-1SINGLE DEGREE OF FREEDOM
SYSTEM
mp(t)
fIfDfS
ExternalLoad,p(t)
Vertical Load,
N = 0Spring,k
Dashpot,c
mass,m
8/10/2019 Second Edition International Code Council 2006
27/547
Chapter Three
18
force varying with time,p(t),where its motion is resisted by its inertial force,fI,a viscous dashpot, c,and an elastic spring, k. The mass can move in itsonly degree of freedom, in direction u.
Dynamic equilibrium may be establishedwith the help of the DAlembert Principle,which states that dynamic equilibriumcan be established similar to static equi-librium if the inertial force is considered areaction to its motion in a direction op-posite to the direction of its acceleration.
As shown in Figure 3-2, this principle isexpressed in mathematical form as
p(t)= fI
where:fI = m
Using the DAlembert Prin-ciple, and in reference toFigure 3-1, dynamic equi-librium for a single degreeof freedom system sub-
jected to an external force,p(t), can be established asfollows:
FX= 0fI+ fD+ fS= p(t)
p(t)ukucum
where:fI = Inertial force.fD = Damping force, which is modeled as a viscous force proportional to
the velocity.fS = Spring force.p(t) = Any external force acting upon the mass.m = Mass.c = Coefficient of viscous damping.k = Spring stiffness.u = Displacement in the shown direction.u = Mass velocity. = Mass acceleration.
For an SDOF structure with properties m, cand kas shown in Figure 3-3,and subjected to ground motion ug (t) where p(t) = 0 and N= 0, dynamicequilibrium requires that:
mP(t)fI
FIGURE 3-2DALEMBERT PRINCIPLE
fI= mu
u
utot= Total Motion
u = Relative Motion(Displacement)
ug= Ground Motion
REFERENCE
AXIS
k / 2 k / 2
c
m
FIGURE 3-3SDOF STRUCTURE
p(t) = 0
N = 0
8/10/2019 Second Edition International Code Council 2006
28/547
Linear Elastic Dynamic Analysis
19
fI+ fD+ fS= 00 ukucum tot
0)( ukucuum g
gumukucum
Note that in the case of support excitation, or earthquake loading, theequation of motion will be identical to the regular SDOF system shownearlier, with ground acceleration acting as an external force, p(t) = mg.Remember that only relative displacements cause internal strainingactions.
In structural dynamics, theequation of motion may bedivided by the mass mto yieldthe following:
guumkumcu )/()/(
or
guuuu 22
where:
= Circular frequency (rad/s).
= Damping ratio, dimensionless quantity, = c/ccr.
ccr= Critical coefficient of damping, ccr= 2 mk .
For c< ccr,or undercritically damped structures, the free vibration solution
( gu = 0) is given as:
u(t) = e t{A cos d t + B sin dt}
where Aand Bare constants determined from initial conditions. d is the
damped frequency, which is equal to d=2
1 . However, for most
structural engineering applications,
8/10/2019 Second Edition International Code Council 2006
29/547
Chapter Three
20
Few examples that have single degree of freedom exist in practice. Forexample, the elevated water tower tank shown in Figure 3-5 is consideredan SDOF system because the mass is con-centrated in one location inside the tank.
3.2.2 Response Spectrum of ElasticSystems
The solution of the equation of motion underthe excitation of a specific excitation is ob-tained by numerical analysis and will be shownlater. During the excitation time of the earth-quake, the solution yields the response dis-placement history of the system as shown inFigure 3-6.
For a specific ground motion, ug(t), we are only interested in the maximumresponse of the structure, or |umax|, which will be denoted by Sd. Sd isknown as the spectral displacement that is defined as the maximumrelative displacement of an SDOF system subjected to a specific groundmotion (earthquake). Note that at the time of maximum displacement, theforce in the spring reaches its maximum value, fs,max, because the velocityequals zero and the damping force, fD,will be equal to zero. Therefore:
fs,max = k Sd
If both sides of the above equation are divided by m,then
fs,max/m = (k/m).Sd
Because 2= k/m,and if the quantityfs,max/mis defined as Sa,then
A, EI
Mass
FIGURE 3-5ELEVATED TANK
FIGURE 3-6
EARTHQUAKE EXCITATION OF SDOF SYSTEM
t
g
Earthquake
u
SDOF
F
m
t
u
Displacement History
8/10/2019 Second Edition International Code Council 2006
30/547
Linear Elastic Dynamic Analysis
21
Sa =2 Sd
Sa is known as the spectral pseudo-acceleration as it is not the actualacceleration of the mass. Instead, it is an acceleration look-alike parameterthat produces the maximum spring force when multiplied by the mass. Thismaximum spring force is known as the base shear of the structure.
Knowing Sa,the force in the spring may now be given in the following form:
fs,max= m Sa
A third quantity of interest in the response spectrum analysis is known asthe spectral pseudovelocity, Sv, which is related to the maximum kineticenergy of the system and is defined as the maximum total velocity of thesystem. When the maximum strain energy, U, of the system is equatedwith the maximum kinetic energy, T, of the system, then
Umax= Tmax
(1/2)k u
2max= (
1/2)m u
2max
(Note that at u max, = 0.)
k Sd2= m Sv
2
Similar to the case of spectral acceleration, if both sides of the equationabove are divided by m, and we notice that k/m is the square of thefrequency, then the equation above becomes
Sv = Sd
Svis also referred to as the maximum earthquake response integral.
0
1
2
0 1 2 3
Period, sec
FIGURE 3-7SAMPLE RESPONSE SPECTRUM(m 3.28 ft)
El Centro Earthquake
Pseudovelocity
Sv
(m/s)
4 5
= 10%
= 2% = 5%
8/10/2019 Second Edition International Code Council 2006
31/547
Chapter Three
22
For a specific system and a specific earthquake, the quantities Sd, Svand Saare related through the system frequency or the system period. Theresponse spectrum is constructed for a specific earthquake by varying the
system period (T1,T2, T3, etc.) and the damping ratio ( 1, 2, 3, etc.). Foreach combination of Tand , the system response is evaluated in terms ofSd, Sv or Sa.The results are then plotted in a form similar to Figure 3-7,
which shows a spectral velocity response spectrum plot for the El CentroEarthquake.
Because Sd, Svand Saare relatedthrough the system frequency(period), they can be plotted on asingle chart using the log-logscale. The resulting chart is calleda Tripartite Chart where Sdand Saappear with constant lines at 45.Figure 3-8 shows such a chart forthe El Centro Earthquake.
Plotted on tripartite paper, re-sponse spectra exhibit generalshapes as shown in Figure 3-9. If the maximum ground parametersmaximum ground displacement, d, maximum ground velocity, v and
FIGURE 3-8
SAMPLE RESPONSE SPECTRUM, TRIPARTEIT CHART (m 3.28 ft)
El Centro Earthquake
1010.10.1
1
10
Period, sec
Pseudoelocity,
Sv,m/s
= 10%
Sd= 1m
Sa= 1 m/s
Sd= 0.1m
Sa= 10 m/s
= 5%
= 2%
T
SvResponse Spectrum
Sa Sdv
a d
Ground Parameters
FIGURE 3-9GENERAL RESPONSE SPECTRUM
8/10/2019 Second Edition International Code Council 2006
32/547
Linear Elastic Dynamic Analysis
23
maximum ground acceleration, aare also plotted on the same chart, theybasically follow the same trend.
This figure shows that for very shortperiod systems where period tends to
zero (T 0 and k ), the spectralacceleration approaches peak ground
acceleration, or Sa a. For very longperiod systems where period tends to
infinity (T and k 0), the spectraldisplacement approaches peak ground
displacement, or Sd d. This behavioris depicted in Figure 3-10.
The relationships shown in Figure 3-10constitute the basic concept behindbase isolation, or seismic isolation,where the structures can be isolatedfrom the ground at the base or isolatedinternally to reduce the amount ofacceleration imparted to the structure.Remember that seismic isolation in-duces large displacements in thestructure, which must be accom-modated by the system. Therefore,seismic isolation is generally a simpletrade-off between large forces andlarge displacements under earthquakeexcitations.
Many seismic isolation systems have already been developed and installed
in buildings and bridges. One popular seismic isolation system is the Lead-Rubber Bearing system shown inFigure 3-11. In this system, thelead core restricts the structuredisplacement under normal loads(nonseismic). Under earthquakeexcitation, the lead yields andgives control to the rubber to ac-commodate large displacement.This yielding of the lead core alsoserves as an energy dissipater.Chapter 13 provides a compre-hensive discussion of this subject.
In addition to the measures ofearthquakes given in Chapter 2, spectral velocity is also used as a measureof earthquakes by defining a quantity known as the response spectrum inte-
FIGURE 3-10LIMITING STRUCTURAL
RESPONSE
T
m
k 0
Sd d 0
u
Sa au 0
T 0
m
k
LeadCore
SteelPlates
Rubber
Cover Plate
FIGURE 3-11
LEAD-RUBBER BEARING
8/10/2019 Second Edition International Code Council 2006
33/547
Chapter Three
24
gral, SI. This integral is an energy measure because spectral velocity isrelated to kinetic energy. SI is expressed as the area under the responsespectrum:
SI = SvdT
where Tis the system period.
3.2.3 Design Response Spectrum
As illustrated in Chapter 2, the shape of a specific response spectrum isextremely jagged and erratic with peaks and valleys as the period varies.
In real structures, exact cal-culations of the period arevery difficult as the period isa function of both mass and
stiffness (T = 2 km / ).
Whereas the stiffness isaffected by nonstructural el-ements, which are usuallynot considered in the anal-ysis, the mass is simply arandom quantity that de-pends on the occupancy ofthe structure at the time ofthe excitations.
For design purposes, many response spectra are usually added togetherand smoothened to yield a smooth design response spectrum as an upperlimit as shown in Figure 3-12.
Response spectrum analysis is usually accepted for regular structures andfor simple irregular structures. For complex structures, especially in high-riskregions of special importance, response spectrum procedures are notacceptable. Instead, the explicit inelastic dynamic analysis that is necessaryrequires many numbers from actual or synthetic acceleration records. Thisvery involved task requires a special understanding of structure stiffness(hysteresis loops) and special skills in modeling of structures.
As discussed before, response spectrum can be used as a measure ofearthquakes because it reflects the amplifications of ground motionsparameters d, vand a.A study of actual earthquake records conducted by
Seed et al. in the United States used the response spectrum in different siteconditions.
T
Sv
Design Spectrum
Individual Spectrum
FIGURE 3-12
DESIGN RESPONSE SPECTRUM
8/10/2019 Second Edition International Code Council 2006
34/547
Linear Elastic Dynamic Analysis
25
Figure 3-13 shows the results of the Seed study, which represent lines ofaverage results of many records. Each site condition (type of soilcharacteristics) exhibits a different response shape. In general, harder sitesare characterized by high energy at higher frequencies.
In seismic codes in the United States, these shapes constitute the basicresponse spectrum shapes for design. A more in-depth discussion isprovided in the design chapters 6 and 9.
Example 3-1
(1) The single degree offreedom structure
shown in Example3-1, Figure 1, hasthe followingproperties:
m = 600kN.s2/m
(3.43 kip.sec2/in)
EIc = 20 x 103kN.m
2
(6.696 x 106kip.in
2)
c = 220 kN.s/m(1.257 kip.sec/in)
FIGURE 3-13ELASTIC RESPONSE SPECTRUM, SEED ET AL.
(AVERAGED FIELD MEASUREMENTS)
Period, sec
Sa
PGA
= 5% DampingSoft to medium clay
Deep cohesionless sand
Stiff soil
Rock
1.0 2.0 3.01.5 2.5
1
2
3
4
0.5
fs,max
L = 3 m(9.84 ft)
EIc= 20 x 103kN.m
2
(6.969 x 106kip.in
2)
c = 220 kN.s/m(1.257 kip.sec/in)
m = 600 kN.s2/m
(3.43 kip.sec
2
/in)
EXAMPLE 3-1, FIGURE 1
EQ Vmax
umax
8/10/2019 Second Edition International Code Council 2006
35/547
Chapter Three
26
Determine the maximum displacement and base shear force if thestructure is excited by the El Centro Earthquake.
(2) Repeat requirements in (1) if the stiffness of the structure isincreased to:
EI = 60 x 103kN.m2(20.91 x 10
6kip.in
2)
Solution
Part (1)
Stiffness: If column stiffness is kc,then:
kc = 12 EI / L3 = 12 (20 x 103) / (3)3= 8,889 kN/m(50.8 kip/in)
ktot = 2 (8,889) = 17,778 kN/m(101.6 kip/in)
Frequency:
= mk / = 600/778,17 = 5.44 rad/s
Damping:
ccr = 2 mk = 2 )600(778,17 = 6,532 kN.s/m
(37.33 kip.sec2/in)
= c / ccr= 220 / 6,532= 0.034 3%
T = 2 / = 2 / 5.44= 1.15s
knowing Tand , the response spectrum given in Figure 3-8 may be usedto directly read the response spectrum quantities Sd, Svand Sa,which read
Sd = 0.15 m, Sv = 0.8 m/s, Sa = 4 m/s2
(5.9 in) (31.5 in/sec) (157.5 in/sec2)
Therefore, displacement and base shear are given as:
umax = Sd= 0.15m (5.9 in)Vmax = fs,max= m Sa= 600 (4)= 2,400 kN (540 kip)
Part (2)
Stiffness: If column stiffness is kc,then:
kc = 12 EI /L3 = 12 (60 x 103) / (3)3= 26,667 kN/m (152 kip/in)
ktot = 2 (26,667) = 53,334 kN/m (305 kip)
8/10/2019 Second Edition International Code Council 2006
36/547
Linear Elastic Dynamic Analysis
27
Frequency:
= mk / = 600/334,53 = 9.43 rad/s
Damping:
ccr = 2 mk = 2 )600(334,53 = 11,313 kN.s /m
(64.65 kip.sec2/in)
= c / ccr= 220 / 11,313= 0.019 2%
T = 2 / = 2 / 9.43= 0.66 s
knowing Tand , the response spectrum given in Figure 3-8 may be usedto directly read the response spectrum quantities Sd, Svand Sa,which read
Sd = 0.09 m, Sv = 0.9 m/s, Sa = 7 m/s2
(3.54 in) (35.43 in/sec) (275.6 in/sec2)
Therefore, displacement and base shear are given as:
umax = Sd= 0.09m (3.54 in)Vmax= fs,max= m Sa= 600(7)= 4,200 kN (944 kip)
Note from (1) and (2) that increasing stiffness attracts more earthquakeforce. Therefore, increasing strength, which in most cases inherently in-creases the stiffness of the structure, may not be conducive to earthquakedesign.
3.3 Generalized Single Degree of Freedom
The dynamic solution to a structural system can be simplified and treated as
an SDOF if its vibration can be expressed in a single quantity. Doing so willrestrict all of the displacements of the structure to a specified deflectedshapethe shape function. The results of such analysis are only as goodas the conformance of the assumed shape with the exact one.
For an assumed shape function, (x), the displacement of the structure,v(x,t),which is a function of time and space, may be expressed as a productof two functions: one function of space, (x), and one function of time, z(t).This technique is known in mathematics as a separation of variables.
Accordingly, the displacement is written as:
v(x,t) = (x) z(t)
where z(t) is defined as a generalized coordinate. The principle of virtualwork may be used to formulate such problems. For example, this principlecan be applied to the vertical cantilever (shear wall) shown in Figure 3-14. In
8/10/2019 Second Edition International Code Council 2006
37/547
8/10/2019 Second Edition International Code Council 2006
38/547
Linear Elastic Dynamic Analysis
29
By setting Wext= Wintand noting that zcancels out, the equation of motionof the system may be written as:
dxmvdxEIzdxczdxmz g)(222
or gvzkzczm ***
where m*is defined as generalized mass, c*as generalized damping and k*as generalized stiffness. The quantity is defined as the earthquake ex-citation factor.
Similar to the SDOF case considered earlier, if the above equation is dividedby m*, the equation of motion reduces to the following form:
gvzzz 22
where is defined as the participation factor,
= / m*
Note that the above equation is identical to an SDOF system, except that
the acceleration is modified by a participation factor . Therefore, for a given
and = ** / mk , or T=
2 / , the response spec-trum of an earthquake canbe used to find the max-imum response values of thesystem: Sd, Svand Sa.Notealso that because gv is mul-
tiplied by in the equation ofmotion, the response spec-trum must also be multiplied
by as shown in Figure 3-15. Thus, the generalizeddisplacement, zmax, is givenas
zmax = Sd,
and since vmax= zmax, the maximum displacement, vmax,is given as
vmax = Sd
The accuracy of this solution largely depends on the choice of the deflected
shape . Because is only an approximation of the true shape, itsderivatives will be less accurate. Therefore, finding forces from derivatives is
T
Sv
Modified Spectrum, gv
Response Spectrum,gv
FIGURE 3-15
MODIFIED RESPONSE SPECTRUM
8/10/2019 Second Edition International Code Council 2006
39/547
Chapter Three
30
considered a poor approximation. For example, if is chosen as = 1
cos x/ 2Hfor the cantilever example given in Figure 3-14, the shear forceat the base can be given in terms of derivatives as V= EI v. Note that theshear at the base is maximum whereas the derivative gives the shear at the
base as zero ( v), a completely erroneousresult!
A more accurate approximation is to find theforce, fs, first and then evaluate shears andmoments accordingly. The force, fs, may befound by noting that the true vibration modeshape must satisfy the differential equation(m + EIu
iv = 0) in undamped harmonic freevibration. From structural dynamics, the so-lution to this equation is given as
(u = uo cos t). Differentiating the solutiontwice shows that ( = 2u). Therefore, thedifferential equation may be written as
m + EI uiv= 0
m ( 2u)+ fs= 0or
fs = m2 ( z)
hence,
fs,max = m2 zmax
= m 2( Sd)
fs,max = m Sa
This relationship gives the earth-quake-induced maximum forces inthe structure. Note that the force dis-tribution is proportional to the as-sumed shape function as shown inFigure 3-18. The reaction of this max-imum force at the base, or the totalearthquake-induced force that isknown as the base shear, VB,may beexpressed as follows:
VB = fs,maxdx
The required shape function for thisanalysis may be approximated with various functions. A good guess for
these shapes is to use the deflected shape from static loadings: top con-centrated force, uniformly distributed load or triangle loading as shown inFigure 3-17.
(x)
fs,max
FIGURE 3-16EARTHQUAKE EQUIVALENT
FORCE
Base Shear,VB
F
FIGURE 3-17
STATIC LOADING
ConcentratedForce
q(x)
UniformLoad
q(x)
TriangleLoad
8/10/2019 Second Edition International Code Council 2006
40/547
Linear Elastic Dynamic Analysis
31
Example 3-2
The cantilever wall shown in Example 3-2, Figure 1, has the followingproperties:
uniform mass: m = 0.77 kN.s2/m 2(112 x 10-6kip.sec2/in/in)uniform inertia: EI = 0.4 x 106 kN.m2(139 x 106kip.in2)
This figure also shows that the wall is carrying two concentrated massesat the top and at midheight. The deflected shape of this structure is givenas
(x)= 1cos( x / 2H)
The structure is excited by the El Centro earthquake with = 5%. Thiswall must be analyzed under two conditions:
(A) If the wall does not carry any concentrated masses.(B) If the wall carries both concentrated masses, M1and M2, as shown in
the same figure.
For both cases (A) and (B), determine:
(1) The maximum top displacement, base moment and base shear.(2) The maximum displacement, moment and shear at midheight.
Solution
Case (A) :
Wall without concentratedmasses:
Part (A-1)
Shape function:
(x) = 1 cos ( x / 2H)(x) = ( / 2H)sin( x / 2H)(x) = ( / 2H)2cos( x / 2H)
Generalized parameters:
m* = 0H m dx
= m 0
H
(1 cos( x / 2H))2
dx= 0.227mH= 0.227 (0.77)(30)= 5.244 kN.s2/m
(0.030 kip.sec2/in)
x, uvtop
,v
(x)
EXAMPLE 3-2, FIGURE 1
H=30m(
98
ft)
M1= 10kN.s
2/m
(0.058kip.sec
2/in)
15m(
49)
15m
(49)
M2= 20kN.s
2/m
(0.114kip.sec
2/in)
8/10/2019 Second Edition International Code Council 2006
41/547
Chapter Three
32
k* = 0HEI ( " dx
= 0HEI {( / 2H)2cos ( x / 2H)}dx
= EI ( / 2H)4(H / 2)= 400 x 103 ( / 2 x 30)4(30 / 2)= 45.096 kN/m
(0.258 kip /in)
= 0H m r dx
= m 0H{1 cos( x / 2H)}(1) dx
= 0.363mH = 0.363(0.77)(30)= 8.385 kN.s2/m(0.048 kip.sec
2/in)
= / m* = 8.386/ 5.244 = 1.599
= ** / mk = 244.5/096.45 = 2.93 rad/s
T = 2 / = 2 / 2.932 = 2.14 s
with T= 2.14 sec and = 5%, the El Centro earthquake response spectrumgiven in Figure 3-8 yields
Sd = 0.23 m (9 in), Sa= 2.0m/s2(79 in/sec2)
Therefore, the resulting displacementsand forces are given as
vtop = Sd= 1(1.599)(0.23)= 0.37 m (14.7 in)
fs,top = m Sa= 0.77(1)(1.599)(2.0)= 2.462 kN/m (0.014 kip/in)
Base shear, VB, in Example 3-2,Figure 2:
VB = 0Hfs,max dx
= 0H m Sadx
=m Sa 0H
{1 cos( x / 2H)}dx=m Sa (0.363H)=0.77(1.599)(2.0)(0.363)(30)= 26.82 kN (6.03 kip)
Base Moment, MB,in Example 3-2, Figure 2:
(x)
fs,top= 2.462 kN/m
EXAMPLE 3-2, FIGURE 2 BASE
REACTIONS
MB= 596 kN.m
H
VB= 26.82 kN
(0.014 kip/in)
(5275 kip.in)
(6.03 kip)
8/10/2019 Second Edition International Code Council 2006
42/547
Linear Elastic Dynamic Analysis
33
MB = 0H
fs,max x dx
= 0H
m Sax dx
=m Sa 0H
{1 cos( x / 2H)}x dx
=m Sa (0.269H
2
)=0.77(1.599)(2.0)(0.269)(302)= 596 kN.m (5,275 kip.in)
Part (A-2)
Similarly, displacements and forces at the midheight of 15 m can be foundby integration as follows:
vmid = Sd= [1 cos( x /2H)] Sd= {1 cos( (15) / 2 (30))(1.599)(0.23)= 0.108 m (4.25 in)}
Vmid= 1530fs,max dx
= 1530 m Sadx
=m Sa(0.313 H)=0.77(1.599)(2.0)(0.313)(30) = 23.12 kN (5.2 kip)
Mmid = 1530fs,max (x15) dx
= 1530 m Sa(x15)dx
=m Sa (0.093H2)
=0.77(1.599)(2.0)(0.093)(302) = 206 kN.m (1,823 kip.in)
Case (B): Wall with concentrated masses:
Results from case (A) can be used in this case.
Part (B-1)
Shape function values at concentrated mass locations:
(x) = 1 cos( x / 2H)(15) = 1 cos[ (15) / 2H]= 0.293(30) = 1 cos[ (30) / 2H]= 1.0
Generalized parameters:
m* = 0H m dx + iMi i
= same as case A+ 1M1 1+ 2M2 2= 5.244 + 10(1)2+ 20(0.293)2
= 5.244 + 10 + 1.717 = 16.961 kN.s2/m (0.097 kip.sec2/in)
k* = same as case A= 45.096 kN/m (0.258 kip/in)
8/10/2019 Second Edition International Code Council 2006
43/547
8/10/2019 Second Edition International Code Council 2006
44/547
Linear Elastic Dynamic Analysis
35
=m Sa (0.269H2)+ Fs 1(H)+ Fs 2(H / 2)
= 0.77(1.429)(0.53)(0.269)(302) + 7.57(30) + 4.44(15)
= 141 + 227 + 67 = 435 kN.m (3850 kip.in)
Part (B-2)
Similarly, displacements and forces at the midheight of 15 m can be foundby integration as follows:
vmid= Sd= [1 cos( x/2H)] Sd= {1 cos( (15) / 2(30))(1.429)(0.20) = 0.084 m (3.3 in)
The shear force at midheight will have a jump at the location of Fs 2. Thus,
Shear force above Fs 2equals to
Vmid = 1530fs,max dx + Fs 1
=m Sa(0.313 H)+ Fs 1= 0.77(1.429)(0.53)(0.313)(30) + 7.57= 5.48 + 7.57 = 13.05 kN (2.934 kip)
Shear force below Fs 2equals to
Vmid= 1530fs,max dx + Fs 1+ Fs
=m Sa(0.313 H)+ Fs 1+ Fs 2=0.77(1.429)(0.53)(0.313)(30) + 7.57 + 4.44= 5.48 + 7.57 + 4.44 = 17.49 kN (3.932 kip)
Mmid = 1530
fs,max(x15)dx + Fs 1(H/2)=m Sa(0.093H
2)+ Fs 1(H /2)
= 0.77(1.429)(0.53)(0.093)(302) + 7.57 (15)= 49 + 114 = 163 kN.m (1443 kip.in)
3.4 Multiple Degrees of Freedom System (MDOF)
3.4.1 Multiple Degrees of Freedom System in 2-D Analysis
A multiple degree of freedom system (MDOF) consists of multiple lumped(concentrated) masses (m1, m2,etc.), where these masses are subjected tovarying forces with time as shown in Figure 3-18. The movement of eachmass is resisted by its inertial force, fi,damping force, fD,and elastic stiff-
ness, fs. By establishing the dynamic equilibrium of each mass in the di-rection of its movement, Figure 3-19 shows the equilibrium of mass, m2,which requires that
8/10/2019 Second Edition International Code Council 2006
45/547
Chapter Three
36
Fx2= 0)()( 1221222 uukuucum tot 0)()( 233233 uukuuc
Similarly, by taking Fxi= 0 at each mass, substituting tot= + g, and
rearranging the equations, they can be put in matrix form as follows:
3
2
1
00
00
00
m
m
m
3
2
1
u
u
u
+
333231
232221
131211
ccc
ccc
ccc
3
2
1
u
u
u
+
333231
232221
131211
kkk
kkk
kkk
3
2
1
u
u
u
=
3
2
1
00
00
00
m
m
m
1
1
1
gu
or
guRMUKUCUM }]{[}]{[}]{[}]{[
where:[M] = Mass matrix (square matrix).[C] = Damping matrix (square matrix).[K] = Stiffness matrix (square matrix).
{U}, }{U , }{U = Displacement, velocity and acceleration matrices (column
matrices).{R} = Earthquake loading vector, or influence vector.
= vector of rigid body displacements resulting from unit supportdisplacement in direction of ground motion.
m2 P(t) = 0
FIGURE 3-19DYNAMIC EQUILIBRIUM
totum ,22
m2k3(u3- u2)
)( 233 uuc
k2(u2- u1)
)( 122 uuc
FIGURE 3-18MDOF STRUCTURE
m3
m2
m1
c3
c2
c1
k3
k2
k1
u1
u2
u3
EQ
8/10/2019 Second Edition International Code Council 2006
46/547
Linear Elastic Dynamic Analysis
37
In general, for N-degrees of freedom, there are square matrices, Nx N,andcolumn matrices, N x 1, of order. The complete formulation from theequilibrium equation yields N-coupled linear differential equations, whichcan be solved by numerical analysis. However, for a linear elastic system,the solution may be simplified using the technique of Modal Analysis, alsoknown as Modal Superposition.
Modal Analysis
Consider the case of an undamped MDOF system in free vibration:
[M]{} + [K]{U} = {0}
By separation of variables,xand t,the displacement, U(x,t), may be givenas {U(x,t)} = [ (x)].{Z(t)}, where n(x) is the n
thmode of vibration associated
with an nth frequency, n.Zn is defined as the n
thmodal coordinate. Note
that n has a fixed shape that vibrates with frequency n and has anamplitude Zn.
The mode shape, n(x),is found by solving the eigenvalue problem, which isalso known as the characteristic-value problem. The solution may be
obtained by assuming a solution to the free vibration in the form {U} = { } sint.Differentiating twice and substituting in the free vibration equation yields
the following:
Let the solution be:
{U}={ }sin t
Differentiating twice:
{}= 2{ }sin t = 2{U}
Substitution in free vibration yields:
[M]{}+ [K]{U}={0} 2[M]{U}+ [K]{U} = {0} 2[M]{ } sin t + [K]{ }sin t = {0} 2[M]{ } + [K]{ } = {0}
Rearranged:
[K]{ } 2[M]{ } = {0}[[K] 2[M]]{ } = {0}
The last equation above represents a set of N-linear homogeneousequations. The solution can only be obtained for relative values of { }.
8/10/2019 Second Edition International Code Council 2006
47/547
8/10/2019 Second Edition International Code Council 2006
48/547
8/10/2019 Second Edition International Code Council 2006
49/547
8/10/2019 Second Edition International Code Council 2006
50/547
Linear Elastic Dynamic Analysis
41
the SABS method should be used. Remember that the SABS is always anupper bound solution.
Better formulas exist and are incorporated in commercial programs. Forexample, a more general complete quadratic combinations (CQC) methodcould be used. This method is basedon probabilistic correlation of theperiods of the mode shapes and re-quires statistical analysis as de-scribed by Clough (1993).
Caution:
One must observe the right sequenceof summation before adding themodal quantities. For example, the
SRSS values of the interstory drift, i,should be obtained by adding the
squares of the interstory drift fromeach mode and then by taking thesquare root of the summation. Itwould be wrong to obtain theinterstory drift by taking the difference of the SRSS of the displacement ofthe adjacent stories. Figure 3-20 illustrates the summation sequence if thedisplacements of stories 1 and 2 are given in the first and second mode asfollows:
Mode 1: {U1,max}=1
2 Mode 2: {U2,max}=
3
5
SRSS of story 1: u1 = 22 52 = 5.39
SRSS of story 2: u2 =22 31 = 3.16
SRSS of interstory: n =22 23 = 3.6
The correct interstory drift is the SRSS of the interstory drift, or 3.6. It wouldbe wrong to consider the interstory drift as the difference between the SRSSof the displacement of adjacent stories, for example (5.39 3.16 = 2.23), oreven (5.39 + 3.16 = 8.55).
Example 3-3
The structure shown in Example 3-3, Figure 1, is idealized as 2DOF, v1andv2. The structure properties are given as shown in the figure as
M = 15 kN.s2/m (0.086 kip.sec2/in)
FIGURE 3-20
INTERSTORY DRIFT
Story 2
Story 1
u1
u2
1
2
8/10/2019 Second Edition International Code Council 2006
51/547
Chapter Three
42
EI = 1500 kN.m2(522,708 kip.in
2)
L = 1 m (39.37 in)
Calculate the maximum SRSS baseshear and base moment if thestructure is excited by the El Centroearthquake along its axis ZZ. Take
= 2%. Note that the members areconsidered axially rigid.
Solution
Define relevant matrices:
(1) Displacement vector:
2
1
}{ v
vU
(2) Mass matrix:
The mass matrix is constructed by applying unit acceleration in each DOFand calculating the corresponding resulting inertial forces. Rememberthat the acceleration of all other DOF must be kept zero, hence:
Applying unit acceleration along v1results in matrix element m11= 2 mApplying unit acceleration along v2results in matrix element m22= 1 m
Therefore, 10
02][ mM
(3) Stiffness matrix:
The stiffness matrix can be constructed inthe usual procedures either by the stiff-ness method or the flexibility method. Ifthe stiffness method is used, the matrixmust be condensed by kinematic con-densation procedures to eliminate therotational DOF. In this case, it is easier touse the flexibility method where the flex-ibility matrix can be directly constructedwithout the rotational DOF. The inverse of
the flexibility matrix will result in the re-quired stiffness matrix.
L
v1v2
2L
EXAMPLE 3-3, FIGURE 2UNIT FORCEIN DIRECTION 1
F1= 1
L
v1
v2
mm
2L EI
EI
EXAMPLE 3-3, FIGURE 1
Z
Z
EQ
8/10/2019 Second Edition International Code Council 2006
52/547
Linear Elastic Dynamic Analysis
43
Flexibility Method:
Apply unit force in the direction of each DOF. Then find displacementsaccordingly. For example:
2
1
2221
1211
2
1
F
F
ff
ff
v
v
By applying unit force in direction 1 asshown in Example 3-3, Figure 2, thecorresponding displacements may befound using any method in structuralanalysis (for example, virtual work). Theresulting displacements are calculated asfollows:
v1 = f11= 8 L3/ (3EI)
v2 = f21= 2L3
/ (EI)
Similarly, the corresponding displace-ments may also be found by applying unit force in direction 2 as shown inExample 3-3, Figure 3. The resulting displacements are calculated asfollows:
v1 = f12= 2 L3/ (EI)
v2 = f22= 7 L3/ (3EI)
The results above can be arranged toyield the flexibility matrix as follows:
7668
3][
3
EILF
The stiffness matrix can now be obtainedby taking the inverse of [F] to yield:
86
67
20
3][
3L
EIK
Stiffness Method with Kinematic Condensation:
When we use the stiffness formulation in reference to Example 3-3, Figure
4, the given structure has four DOFs, two displacements (v1, v2) and tworotations ( 1, 2), provided the structure has axial rigidity. The global stiffnessmatrix may be assembled with the usual procedures and arranged by
L
v1v2
2L
EXAMPLE 3-3, FIGURE 3UNIT FORCE
IN DIRECTION 2
F2= 1
EXAMPLE 3-3, FIGURE 4STIFFNESS METHOD
L
v1
1
2L
2
v2
8/10/2019 Second Edition International Code Council 2006
53/547
Chapter Three
44
separation of the displacement DOFs from the rotational DOFs. If thematrices are partitioned, they can be given in the following form:
}{
}{
][][
][][
}{
}{
2221
1211 v
KK
KK
M
F
where {F} and {v} are the force and displacement submatrices, and {M} and{ } are the moment and rotational submatrices. Insofar as the external mo-ments at the rotational DOFs will always be zero, the rotational DOFs maybe eliminated as follows:
Multiplying the bottom row in the matrix above and noting that {M} = 0 yields
since {M = [K21] {v}+ [K22]{ }= {0}then { } = [K22]
1[K21]{v}
Multiplying the first row of the original matrix
yields
{F} = [K11]{v}+ [K12] { }
substitution of { }, as previously obtained fromthe equation above, yields
{F} = [K11] {v} + [K12] {[K22]1
[K21] {v}}{F} = {[K11] [K12] {[K22]
1[K21]} {v}
Using the sign convention given in Example 3-3, Figure 4, the relevantmatrices are constructed as follows:
Element stiffness matrix is given for the beam element shown in Example3-3, Figure 5, as follows:
{V} = [ke] {v}, or,
j
j
i
i
j
j
i
i
v
v
LLLL
LL
LLLL
LL
L
EI
M
V
M
V
4626
612612
2646
612612
22
22
3
Partitioned global matrix,
120
05.1][
311
L
EIK
LL
L
L
EIK
66
05.1][
312
L
LL
L
EIK
60
65.1][
321
22
2
322 42
26][
LL
LL
L
EIK
EXAMPLE 3-3, FIGURE 5ELEMENT STIFFNESS
MATRIX
L
Vi , vi
Mi , i Mj , j
Vj , vj
8/10/2019 Second Edition International Code Council 2006
54/547
Linear Elastic Dynamic Analysis
45
The inverse is
22
2231
22/6/2
/2/4
20][
LL
LL
EI
LK
After performing the matrix multiplication above, the final matrix will be
{F} = [K] {v}
where
86
67
20
3][
3L
EIK
which is the same result obtained by the force method.
(4) Eigenvalue solution:
| [K] 2[M] | = 0
86
67
20
33L
EI 010
022 m
If is set to ( = 2m (20 L3)/ 3EI), the equation above becomes
086
627
expansion of the determinant yields (7 2 )(8 ) 36 = 0or
2 11.5 + 10 = 0
Solution of the quadratic equation above yields two roots of ( 1= 0.948and 2= 10.55).
For each value of , there will be a frequency and an associated modeshape, which are obtained as follows:
For 1= 0.948:
Frequency 12 = 1(3EI /20mL
3) = 0.948 (3EI /20 mL3)
1 = 0.3773/ LmEI
Mode shape, let v1arbitrarily be 1, then
0
01
)948.0(86
6)948.0(27
2v
8/10/2019 Second Edition International Code Council 2006
55/547
8/10/2019 Second Edition International Code Council 2006
56/547
Linear Elastic Dynamic Analysis
47
Because the construction of vector {R}completes the construction of allrequired matrices for modal analysis,the analysis can be started mode bymode to find earthquake-induced forcesin the form
{fs,max} = [M] { } Sa
Mode (1):
{fs1} = [M] { 1} 1Sa11 = { 1}
T[M] {R}
= 894.0
447.0
10
02)15}(85.00.1{ = 2.01kN.s2/m (0.011 kip.sec2/in)
m1*
= { 1}T[M] { 1}
=85.0
0.1
10
02)15}(85.00.1{
= 40.84kN.s2/m(0.233 kip.sec
2/in)
1 = 1/ m1*= 2.01 / 40.84 = 0.049
1 = 0.377 3/ LmEI
= 0.377 )115(/500,1 x
= 3.77 rad/s
T1 = 2 / 1= 2 /3.77 = 1.67s
With T1= 1.67 seconds and 1= 2%, Sa1can be directly read from the ElCentro response spectrum curves given in Chapter 2 to yield Sa1= 2.2 m/s
2
(86.6 in/sec2). Thus, the modal forces are given as
{fs1} = [M] { 1} 1 Sa1
= 37.1
23.3
)2.2()049.0(85.0
0.1
10
02
)15( kN kip308.0
726.0
EXAMPLE 3-3, FIGURE 6
RIGID BODY MOTION
L
v1
v22L
Z
Z
v1= 0.447v2=-0.8
94vzz= 1
L
3.23 kN
2L
EXAMPLE 3-3, FIGURE 7
MODAL FORCES, MODE (1)
1.37 kN
V1= 3.23 kN
M1= 7.83 kN.m
8/10/2019 Second Edition International Code Council 2006
57/547
Chapter Three
48
With these forces applied as shown in Example 3-3, Figure 7, the reactionsat the base may be calculated by statics to yield the base shear, V1, andbase moment, M1.
V1= 3.23kN
M1= 3.23(2) + 1.37(1) =7.83kN.m (69.3 kip.in)
Similarly, mode (2) can be evaluated as follows:
Mode (2):
{fs2} = [M] { 2} 2Sa2
2 = { 2}T[M] {R}
=
894.0
447.0
10
02)15}(35.20.1{ =44.85 kN.s2/m
(0.256 kip.sec2/in)
m2*
= { 2}T[M] { 2}
=
35.2
0.1
10
02)15}(35.20.1{ = 112.98 kN.s2/m
(0.646 kip.sec2/in)
= 2/m2*= 44.85 / 112.98 = 0.398
2 = 1.2583/ LmEI
= 1.258 )115(/500,1 x = 12.58
rad/s
T2 = 2 / 2= 2 /12.58 = 0.5s
With T2= 0.5 second and 2= 2%, Sa2can be directly read from the El Centro re-sponse spectrum curves given in Chapter2 to yield Sa2= 10 m/s
2. Thus, the modal
forces are given as:
{fs2} = [M] { 2} 2 Sa2
= )0.10()398.0(35.2
0.1
10
02)15(
L
120 kN
2L
EXAMPLE 3-3, FIGURE 8
MODAL FORCES, MODE (2)
140 kN
V2= 120 kN
M2= 100 kN.m
8/10/2019 Second Edition International Code Council 2006
58/547
Linear Elastic Dynamic Analysis
49
140
120kN
kip
475.31
978.26
With these forces applied as shown in Example 3-3, Figure 8, the reactions
at the base may be calculated by statics to yield the base shear, V2, andbase moment, M2:
V2 = 120 kN (26.978 kip)
M2 = 120(2) 140(1) = 100 kN.m (885 kip.in)
The final results are obtained by adding values from mode 1 and mode 2,including the base shear and base moments. If the SRSS method of sum-mation is used, the base shear and base moments are calculated as follows
Vmax =
2
2
2
1 VV
= 22 12023.3 = 120.04 kN (26.987 kip)
Mmax =2
22
1 MM =22 10083.7 = 100.31 kN.m
(888 kip.in)
In this example, mode (1) has little effect on the final force. This is not nec-essarily the usual case in analysis.
The earthquake-induced displacements may be found for each mode bystatics that are due to modal forces or may be found using the modal
displacement equations. The required Sdn may be read directly from theresponse spectrum or may be calculated from San. Using modal dis-placement procedure results in
{Un,max} = { n} nSdn
Mode (1): {U1} = { 1} 1Sd1,
where Sd1 =Sa1/ 1= 2.2/3.772= 0.15 m (5.9)
Therefore, 25,006.0
35,007.0)15.0()049.0(
85.0
0.1
2
1
v
vm
"246.0
"289.0
Mode (2): {U2} = { 2} 2Sd2,
8/10/2019 Second Edition International Code Council 2006
59/547
Chapter Three
50
where Sd2 =Sa2/ 2= 10/12.582= 0.063 m
Therefore,
9,058.01,025.0)063.0()398.0(
35.20.1
2
1
vv m
"319.2"988.0
The SRSS displacements become,
v1,max =22 1,025.035,007.0 = 0.026 m (1.024 )
v2,max =22 9,058.025,006.0 = 0.059 m (2.323 )
Example 3-4
Because the structure shown inExample 3-4, Figure 1, has verystiff beams, it will be idealized astwo degrees of freedom. Thestructure properties are given asfollows:
mass:m1 = 0.2 kN.s
2/mm
(1.143 kip.sec2/in)
m2 = 0.4 kN.s2/mm
(2.286 kip.sec2/in)
stiffness:
k1 = 12 EI1/L13 = 50 kN/mm(285.7 kip/in)
k2 = 12 EI2/L23 = 100 kN/mm(571.4 kip/in)
damping: = 5%
If the structure is excited by the El Centroearthquake in the direction shown in thesame figure, calculate the maximum dis-placements, maximum story forces and
maximum reactions (the base shear andbase moment using the SRSS combiningmethod).
m1
m2
EXAMPLE 3-4,
FIGURE2
m1
m2
1= 1
m1
m2
2= 1
EXAMPLE 3-4, FIGURE 1
u2
u1
m1
m2
k1
k2
EQ
k1
k2
L1= 3 m(9.84 ft)
L2= 3 m9.84 ft
8/10/2019 Second Edition International Code Council 2006
60/547
Linear Elastic Dynamic Analysis
51
Solution
(1) Displacement vector: 2
1}{
u
uU
(2) Mass matrix:
The mass matrix may be found as in the previous examples by applying unitacceleration along each degree of freedom as shown in Example 3-4,Figure 2, and then by calculating the resulting forces. Accordingly, the massmatrix is given as
20
012.0][M kN.s2/mm
(1.14320
01kip.sec
2/in)
(3) Stiffness matrix:
Because the beams are stiff enough to prevent joint rotations, the stiffnessmatrix can be constructed by simply applying unit displacements in thedirection of each degree of freedom (as shown in Example 3-4, Figure 3)and by calculating the resulting forces. Accordingly, the stiffness matrix isgiven as
31
11100][K kN/mm
(571.4
31
11kip/in)
m1
m2
EXAMPLE 3-4,FIGURE 3
u2= 1
100
200
200
100100
100
u1= 1
8/10/2019 Second Edition International Code Council 2006
61/547
8/10/2019 Second Edition International Code Council 2006
62/547
Linear Elastic Dynamic Analysis
53
Frequency 22 = 2 (500) = 2(500) = 1,000
2 = 000,1 = 31.62 rad/s
Mode shape: let v1arbitrarily be 1, then
0
01
)2(231
1)2(1
2u
Multiplication of the first row yields
1 u2= 0 u2= 1
Therefore, mode 2 becomes
{ 2} = {1.0 1}T
The results summary is given below andshown graphically in Example 3-4, Figure 4.
62.31
81.15
15.0
11][ 21
(5) Modal analysis:
The earthquake loading vector, {R}, is constructed by giving the structure
unit rigid body motion in the direction of the earthquake and then calculatingthe displacements of the DOFs accordingly:
{R} =1
1
Mode (1):
1 = { 1}T[M] {R} =
1
1
20
01)2.0(}5.00.1{ = 0.4 kN.s
2/mm
m1*
= { 1}T[M] { 1} =
5.0
0.1
20
01)2.0(}5.00.1{ = 0.3 kN.s
2/mm
(1.714 kip.sec
2
/in)1 = 1/ m1
*= 0.4 / 0.3 = 1.333
T1 = 2 / 1= 2 /15.81 = 0.4 s
.
EXAMPLE 3-4, FIGURE 4
11 22
8/10/2019 Second Edition International Code Council 2006
63/547
Chapter Three
54
With T1= 0.4 second and 1= 5%, Sd1and Sa1can be directly read from theEl Centro response spectrum curves (Figure 3-8) to yield Sd1 = 0.022 m(0.87) and Sa1= 6 m/s
2(237 in/sec
2). Thus, the modal response is given as
{U1} = { 1} 1Sd1= 1529)22()333.1(
5.00.1
2
1
uu mm
"59.0"14.1
{fs1} = [M] { 1} 1Sa1
= 600,1
600,1)000,6()333.1(
5.0
0.1
20
01)2.0( kN kip
360
360
Mode (2):
2= { 2}
T[M] {R} =
1
1
20
01)2.0(}11{ = 0.2 kN.s
2/mm
(1.143 kip.sec
2
/in)
m2*= { 2}
T[M] { 2} =
1
1
20
01)2.0(}11{ = 0.6 kN.s
2/mm
(3.429 kip.sec2/in)
2 = 2/ m2*= 0.2 / 0.6 = 0.333
T2= 2 / 2 = 2 /31.62 = 0.2 s
With T2= 0.2 second and 2= 5%, Sd1and Sa1can be directly read from theEl Centro response spectrum curves (Figure 3-8) to yield Sd2 = 0.007 m
(0.28 in) and Sa2= 7 m/s2(276 in/sec2). Thus, the modal response is givenas
{U2} = { 2} 2Sd2 =
2
2)7()333.0(
1
1
2
1
u
umm
"79.0
"79.0
{fs2} = [M] { 2} 2Sa2= )000,7()333.0(1
1
20
01)2.0(
932
466kN
kip
210
105
Finally, the total response is found using the SRSS method. Summary ofmodal response of modes 1 and 2 is shown in Example 3-4, Figure 5,
8/10/2019 Second Edition International Code Council 2006
64/547
8/10/2019 Second Edition International Code Council 2006
65/547
Chapter Three
56
Calculate the maximum displacements, maximum story forces and max-imum reactions using the SRSS combining method.
Solution
(1) Displacement vector:
{U} =2
1
u
u
(2) Mass matrix:
As in the previous examples, the massmatrix may be found by applying unitacceleration along each degree offreedom (as shown in Example 3-5, Figure2) and then calculating the resultingforces. Accordingly, the mass matrix isgiven as
2000
0100][M kN.s
2/m
in/sec.kip143.10
0571.0 2
(3) Stiffness matrix:
Because the beam is a cantilever
with rotational DOF, it will be easierto construct the stiffness matrixfrom the flexibility matrix thanconstructing the general stiffness
EXAMPLE 3-5, FIGURE 3
6/EI
ConjugateBeam
3/EI
u1
u2
F1= 1
Force-Diagonal
3 m(9.84 ft)
3 m(9.84 ft)
6
M-Diagonal
3
m1
m2
EXAMPLE 3-5, FIGURE 2
m1
m2
1= 1
m1
m2
2= 1
EXAMPLE 3-5, FIGURE 1
Sv
rad/s
2
= 5%0.5
12
(b) EQ Response Spectrum
T (sec)
u2
u1
EQ
3 m
(9.84 ft)
3 m(9.84 ft)
m1
m2
EI
EI
(a) Idealized Structure
8/10/2019 Second Edition International Code Council 2006
66/547
Linear Elastic Dynamic Analysis
57
matrix and kinematically condensing the rotational DOF as illustrated inExample 3-3.
The flexibility matrix can be constructed by simply applying unit dis-placements in the direction of each degree of freedom. In the followinganalysis, the conjugate beam method is used to calculate the requireddisplacements.
u1-direction
Apply unit force at joint 1 as shown in Example 3-5, Figure 3. The resultingbending moment and conjugate beam will be as shown. Accordingly, theresulting displacements at joints 1 and 2 are calculated as follows:
f11= q(L)2/ 3 EI
= 6 (6)2/ 3 (3 x 10
6)
= 24 x 106
m(945 x 10
6in)
f21= 6 (3)2/ 3 (3 x 10
6)
+ 3 (3)2/ 6 (3 x 10
6)
= 7.5 x 106
m(295 x 10
6in)
u2-direction
Apply unit force at joint 2 as shown in Example 3-5, Figure 4. The resultingbending moment and conjugate beam will be as shown. Accordingly, theresulting displacements at joints 1 and 2 are calculated as follows:
f12 =1
/2q (L) (L +2
/3L) / 3 EI=
1/23 (3) (5) / (3 x 10
6) = 7.5 x 10
6m (295 x 10
6in)
f22 = 3 (3)2/ 3 (3 x 10
6= 3 x 10
6m (118 x 10
6in)
Accordingly, the flexibility matrix, [F], is given as
35.7
5.72410][ 6
2221
1211
ff
ffF m/kN
kip/in118295
29594510 6
The stiffness matrix is obtained by taking the inverse of matrix [F]. Becausethe determinant of |[F]| = (24(3) (7.5)
2) x 10
12= 15.75 x 10
12, [K] will be
EXAMPLE 3-5, FIGURE 4
u1
u2F2= 1
Force-Diagonal
3 m
3 m(9.84 ft)
3/EI
ConjugateBeam
3
M-Diagonal
8/10/2019 Second Edition International Code Council 2006
67/547
Chapter Three
58
245.7
5.73492,63
245.7
5.73
1075.15
10][
12
6
xK kN/m
kip/in245.7
5.73363
(4) Eigenvalue solution:
| [K] 2[M] | = 0
245.7
5.73492,63 0
20
01)100(2
If is set to ( =2 (100) / (63,492) =
2 / 634.92), the equation above
becomes
02245.5.73
expansion of the determinant yields (3 ) (24 2 ) (7.5)2= 0
or 22 30 + 15.75 = 0
Solution of the above quadratic equation yields two roots of :
1 = 0.545 and 2= 14.455
For each value of there will be a frequency and an associated modeshape that are obtained as follows:
For 1= 0.545:
Frequency 12
= 1 (634.92) = 0.545 (634.92) = 346
1 = 346 = 18.60 rad/s
Mode shape: let u1arbitrarily be 1, then
0
01
)0545(2245.7
5.7)545.0(3
2u
Multiplication of the first row yields
2.455 7.5 u2= 0 u2= 0.327
8/10/2019 Second Edition International Code Council 2006
68/547
Linear Elastic Dynamic Analysis
59
Therefore, mode 1 becomes { 1} = {1.0 0.327}T
Similarly for mode 2, we have
For2= 14.455:
Frequency 22
= 2 (634.92) = 14.455 (634.92) = 9178
2 = 178,9 = 95.80 rad/s
Mode shape: let u1arbitrarily be 1, then
0
01
)455.14(2245.7
5.7)455.14(3
2u
Multiplication of the first row yields
11.455 7.5 u2= 0 u2= 1.527
Therefore, mode 2 becomes
{ 2} = {1.0 1.527}T
The summary of results