Embed Size (px)
Citation preview

Sebastian ThrunCarnegie Mellon University
Statistical Learning in RoboticsState-of-the-Art, Challenges and Opportunities

Sebastian Thrun Carnegie Mellon University ICML July 10-12, 2002
7 Open Problems
Estimation andLearning In
Robotics
RoboticsResearch Today
RoboticsResearch Today

Sebastian Thrun Carnegie Mellon University ICML July 10-12, 2002
Robotics Yesterday

Sebastian Thrun Carnegie Mellon University ICML July 10-12, 2002
Robotics Today

Sebastian Thrun Carnegie Mellon University ICML July 10-12, 2002
Robotics Tomorrow?
Thanks toT. Dietterich

Sebastian Thrun Carnegie Mellon University ICML July 10-12, 2002
Robotics @ CMU, 1992

Sebastian Thrun Carnegie Mellon University ICML July 10-12, 2002
Robotics @ CMU, 1994

Sebastian Thrun Carnegie Mellon University ICML July 10-12, 2002
Robotics @ CMU 1996
With: RWI / iRobot, Hans Nopper

Sebastian Thrun Carnegie Mellon University ICML July 10-12, 2002
Robotics @ CMU/UBonn, 1997
with W. Burgard, A.B. Cremers, D. Fox, D. Hähnel, G. Lakemeyer, D. Schulz, W. Steiner

Sebastian Thrun Carnegie Mellon University ICML July 10-12, 2002
Robotics @ CMU, 1998
with M. Beetz, M. Bennewitz, W. Burgard, A.B. Cremers, F. Dellaert, D. Fox, D. Hähnel, C. Rosenberg, N. Roy, J. Schulte, D. Schulz

Sebastian Thrun Carnegie Mellon University ICML July 10-12, 2002
7 Open Problems
RoboticsResearch Today
Estimation andLearning In
Robotics

Sebastian Thrun Carnegie Mellon University ICML July 10-12, 2002
The Robot Localization Problem
• Position tracking (error bounded)• Global localization (unbounded error)• Kidnapping (recovery from failure)
?

Sebastian Thrun Carnegie Mellon University ICML July 10-12, 2002
Probabilistic Localization
p(z0 | x, m)
p(x0 | z0, m)
p(x1|u1,z0,m)
[Simmons/Koenig 95][Kaelbling et al 96][Burgard et al 96][Thrun et al 96]
p(z1 | x, m)
p(x1| ,z1 ,u1,z0,m)
p(x0 | m)

Sebastian Thrun Carnegie Mellon University ICML July 10-12, 2002
Probabilistic Localization
),,|(),,,|( 010010 muzxpmuzxzp ttttttt Bayes
[Kalman 60, Rabiner 85]
x = statet = timem = mapz = measurementu = control
Markov),,|(),|( 010 muzxpmxzp ttttt
101010101 ),,|(),,,|(),|( tttttttttt dxmuzxpmuzxxpmxzp
Markov
1101011 ),,|(),|(),|( ttttttttt dxmuzxpuxxpmxzp
),,|( 00 muzxp ttt
laser data p(z|x,m)map m
xt-1
ut
p(xt|xt-1,ut)

Sebastian Thrun Carnegie Mellon University ICML July 10-12, 2002
What is the Right Representation?
Multi-hypothesis
[Weckesser et al. 98], [Jensfelt et al. 99]
Particles
[Kanazawa et al 95] [de Freitas 98][Isard/Blake 98] [Doucet 98]
Kalman filter
[Schiele et al. 94], [Weiß et al. 94], [Borenstein 96], [Gutmann et al. 96, 98], [Arras 98]
[Nourbakhsh et al. 95], [Simmons et al. 95], [Kaelbling et al. 96], [Burgard et al. 96], [Konolige et al. 99]
Histograms(metric, topological)

Sebastian Thrun Carnegie Mellon University ICML July 10-12, 2002
Monte Carlo Localization (MCL)
p(z0 | x, m)
p(x0 | z0, m)
p(x1|u1,z0,m)
p(z1 | x, m)
p(x1| ,z1 ,u1,z0,m)
p(x0 | m)

Sebastian Thrun Carnegie Mellon University ICML July 10-12, 2002
Monte Carlo Localization (MCL)
With: Wolfram Burgard, Dieter Fox, Frank Dellaert

Sebastian Thrun Carnegie Mellon University ICML July 10-12, 2002
Implications for Planning & Control
MDP Planner POMDP Planner
With N. Roy

Sebastian Thrun Carnegie Mellon University ICML July 10-12, 2002
Monte Carlo Localization
With:
Frank
Dellaert

Sebastian Thrun Carnegie Mellon University ICML July 10-12, 2002

Sebastian Thrun Carnegie Mellon University ICML July 10-12, 2002

Sebastian Thrun Carnegie Mellon University ICML July 10-12, 2002
Learning Mapsaka Simultaneous Localization and Mapping (SLAM)
70 m

Sebastian Thrun Carnegie Mellon University ICML July 10-12, 2002
Learning Maps
110101100 ),,|(),|(),|(),,|( tttttttttttt dxmuzxpuxxpmxzpmuzxp
106 dimensions 3 dimensions
Localization:
111010111100 ),|,(),,|,(),|(),|,( tttttttttttttttttt dmdxuzmxpumxmxpmxzpuzmxp
110101100 ),|,(),|(),|(),|,( tttttttttttt dxuzmxpuxxpmxzpuzmxp

Sebastian Thrun Carnegie Mellon University ICML July 10-12, 2002
Learning Maps with Extended Kalman Filters
2
2
2
2
2
2
2
1
11
21
21
21
21
2222221
1111211
,),|,(
yxlll
yyxyylylyl
xxyxxlxlxl
lylxllllll
lylxllllll
lylxllllll
Nttt
N
N
N
NNNNNN
N
N
y
x
l
l
l
uzmxp
[Smith, Self, Cheeseman, 1990]

Sebastian Thrun Carnegie Mellon University ICML July 10-12, 2002
Kalman Filter Mapping: O(N2)

Sebastian Thrun Carnegie Mellon University ICML July 10-12, 2002
Can We Do the Same WithParticle Filters?
robot poses and maps
),|,( 00 ttt uzmxp
sample map + pose

Sebastian Thrun Carnegie Mellon University ICML July 10-12, 2002
N
ntttntttttt uzsmpuzspuzsmp
1000000000 ),,|(),|(),|,(
Mapping: Structured Generative Model
s1 s2 st
u2 ut
m2
m1
z1
z2
s3
u3
z3
zt
. . .
Landmark
robot pose
control
measurement
With K. Murphy, B. Wegbreit and D. Koller

Sebastian Thrun Carnegie Mellon University ICML July 10-12, 2002
Rao-Blackwellized Particle Filters
landmark n=2
…
),|(~ 00][
ttti
t uzxpx
landmark n=Nlandmark n=1
landmark n=2
…landmark n=Nlandmark n=1
),,|( 00][
tti
tn uxmp
robot poses
[Murphy 99, Montemerlo 02]
N
ntttntttttt uzsmpuzspuzsmp
1000000000 ),,|(),|(),|,(

Sebastian Thrun Carnegie Mellon University ICML July 10-12, 2002
Ben Wegbreit’s Log-Trick
8,87,7
k 3 ?
FT
6,65,5
k 1 ?
FT
4,43,3
k 3 ?
FT
2,21,1
k 1 ?
FT
k 6 ?
FT
k 2 ?
FT
k 4 ?FT
[i][i] [i][i] [i][i] [i][i] [i][i] [i][i] [i][i][i][i] 8,87,7
n 7 ?
FT
6,65,5
n 5 ?
FT
4,43,3
n 3 ?
FT
2,21,1
n 1 ?
FT
n 6 ?
FT
n 2 ?
FT
n 4 ?FT
[i] [i][i] [i][i] [i][i] [i][i] [i][i] [i][i][i]
3,3
n 3 ?
FT
n 2 ?
FT
n 4 ?
F
T
[i][i]
new particle
old particle
Michael Montemerlo, Ben Wegbreit, Daphne Koller & Sebastian Thrun

Sebastian Thrun Carnegie Mellon University ICML July 10-12, 2002
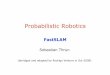
Advantage of Structured PF Solution
Kalman: O(N2)
500 features
1,000,000 features
Moore’s Theorem: logN 30Experimental: M=250
Rao-B’ PFs: O(MlogN)
+ global uncertainty, multimodal+ non-linear systems+ sampling over data associations

Sebastian Thrun Carnegie Mellon University ICML July 10-12, 2002
3 Examples
Particles +Kalman filters Particles +
Particles
Particles +Point Estimators

Sebastian Thrun Carnegie Mellon University ICML July 10-12, 2002
Outdoor Mapping (no GPS)
With Juan Nieto, Jose Guivant, Eduardo Nebot, Univ of Sydney

Sebastian Thrun Carnegie Mellon University ICML July 10-12, 2002
With Juan Nieto, Jose Guivant, Eduardo Nebot, Univ of Sydney

Sebastian Thrun Carnegie Mellon University ICML July 10-12, 2002
Tracking Moving Features
With: Michael Montemerlo

Sebastian Thrun Carnegie Mellon University ICML July 10-12, 2002
Tracking Moving Entities Through Map Differencing

Sebastian Thrun Carnegie Mellon University ICML July 10-12, 2002
Map-Based People Tracking
With: Michael Montemerlo

Sebastian Thrun Carnegie Mellon University ICML July 10-12, 2002
Autonomous People Following
With: Michael Montemerlo

Sebastian Thrun Carnegie Mellon University ICML July 10-12, 2002
Indoor Mapping
Map: point estimators (no uncertainty) Lazy

Sebastian Thrun Carnegie Mellon University ICML July 10-12, 2002
Importance of Probabilistic Component
Non-probabilistic Probabilistic, with samples

Sebastian Thrun Carnegie Mellon University ICML July 10-12, 2002
Multi-Robot Exploration
DARPA TMR MarylandDARPA TMR Texas
With: Reid Simmons and Dieter Fox

Sebastian Thrun Carnegie Mellon University ICML July 10-12, 2002
Learning Object Models

Sebastian Thrun Carnegie Mellon University ICML July 10-12, 2002
Nearly Planar Maps
Idea: Exploit fact that buildings posses many planar surfaces Compacter models Higher Accuracy Good for capturing environmental change

Sebastian Thrun Carnegie Mellon University ICML July 10-12, 2002
Online EM and Model Selection
mostly planar mapraw data

Sebastian Thrun Carnegie Mellon University ICML July 10-12, 2002
Online EM and Model Selection
CMU Wean Hall Stanford Gates Hall

Sebastian Thrun Carnegie Mellon University ICML July 10-12, 2002
3D Mapping Result
With: Christian Martin

Sebastian Thrun Carnegie Mellon University ICML July 10-12, 2002
Combining Tracking and Mapping
With Dirk Hähnel, Dirk Schulz and Wolfram Burgard

Sebastian Thrun Carnegie Mellon University ICML July 10-12, 2002
Combining Tracking and Mapping
With Dirk Hähnel, Dirk Schulz and Wolfram Burgard

Sebastian Thrun Carnegie Mellon University ICML July 10-12, 2002
Underwater Mapping (with University of Sydney)
With: Hugh Durrant-Whyte, Somajyoti Majunder, Marc de Battista, Steve Scheding

Sebastian Thrun Carnegie Mellon University ICML July 10-12, 2002
RoboticsResearch Today
Estimation andLearning In
Robotics
7 Open Problems

Sebastian Thrun Carnegie Mellon University ICML July 10-12, 2002
Can We Learn Better Maps?
Stationary objects and moving objects, people
Motion characteristics, relational knowledge Less structured environments (jungle, underwater) In real-time

Sebastian Thrun Carnegie Mellon University ICML July 10-12, 2002
Can We Learn Control?
1t0..t0..t u)u,z|(: txp
Not an MDP Not discrete or low-dimensional Not knowledge-free

Sebastian Thrun Carnegie Mellon University ICML July 10-12, 2002
How Can We Learn in Context?
Goal of robotics is not … mapping classification clustering density estimation reward prediction …
But simply: Doing the right thing.

Sebastian Thrun Carnegie Mellon University ICML July 10-12, 2002
How can we exploit Domain Knowledge in Learning?
Test: Is hypothesis consistent with laws of geometry? laws of physics? conventional wisdom? …
Domain knowledge is your friend! ILP? “Lifelong” learning?

Sebastian Thrun Carnegie Mellon University ICML July 10-12, 2002
Can we Integrating Learning and Programming?
LearningProgramming
prob<int> x = {{10, 0.2}, {11, 0.8}};
prob<int> y = {{20, 0.5}, {21, 0.5}};
prob<int> z = x + y;
prob<double> f = neuroNet(y);
with Frank Pfenning, CMU

Sebastian Thrun Carnegie Mellon University ICML July 10-12, 2002
What Can We LearnFrom Biology?
Courtesy of Bill Skaggs, University of Pittsburgh

Sebastian Thrun Carnegie Mellon University ICML July 10-12, 2002
University of Pittsburgh School of Nursing
Prof. Jackie Dunbar-JacobProf. Sandy EngbergProf. Margo HolmProf. Deb LewisProf. Judy MatthewsProf. Barbara Spier
School of MedicineProf. Neil ResnickProf. Joan Rogers
Intelligent SystemsProf. Don Chiarulli
University of Pittsburgh Computer Science Prof. Martha Pollack
Carnegie Mellon University Computer Science, Robotics
Prof. Sebastian Thrun
Prof. Geoff Gordon
Human Computer Interaction Prof. Sara Kiesler
Financial Support National Science Foundation
$1.4M ITR Grant $3.2M ITR Grant
…And Can We Actually DoSomething Useful?

Sebastian Thrun Carnegie Mellon University ICML July 10-12, 2002
The Nursebot Project

Sebastian Thrun Carnegie Mellon University ICML July 10-12, 2002
Haptic Interface (In Development)

Sebastian Thrun Carnegie Mellon University ICML July 10-12, 2002
Wizard of Oz Studies
By Sara Kiesler, Jenn Goetz

Sebastian Thrun Carnegie Mellon University ICML July 10-12, 2002
Truly Useful….?