Embed Size (px)
Citation preview

Search State Extensibility based Learning Framework
for Model Checking and Test Generation
Maheshwar Chandrasekar
Dissertation submitted to the Faculty of
Virginia Polytechnic Institute and State University
in partial fulfillment of the requirements for the degree of
Doctor of Philosophy
in
Computer Engineering
Michael S. Hsiao, Chair
Sandeep K. Shukla
Dong S. Ha
Allen B. MacKenzie
Ezra A. Brown
September 10, 2010
Blacksburg, Virginia
Keywords: Design Verification, Model Checking, Fault Model, Automatic Test Generation
and Fault Diagnosis
Copyright c© 2010, Maheshwar Chandrasekar

Search State Extensibility based Learning Framework for Model
Checking and Test Generation
Maheshwar Chandrasekar
ABSTRACT
The increasing design complexity and shrinking feature size of hardware designs have created
resource intensive design verification and manufacturing test phases in the product life-cycle
of a digital system. On the contrary, time-to-market constraints require faster verification and
test phases; otherwise it may result in a buggy design or a defective product. This trend in the
semiconductor industry has considerably increased the complexity and importance of Design
Verification, Manufacturing Test and Silicon Diagnosis phases of a digital system production
life-cycle. In this dissertation, we present a generalized learning framework, which can be
customized to the common solving technique for problems in these three phases.
During Design Verification, the conformance of the final design to its specifications is verified.
Simulation-based and Formal verification are the two widely known techniques for design
verification. Although the former technique can increase confidence in the design, only the
latter can ensure the correctness of a design with respect to a given specification. Originally,
Design Verification techniques were based on Binary Decision Diagram (BDD) but now such
techniques are based on branch-and-bound procedures to avoid space explosion. However,
branch-and-bound procedures may explode in time; thus efficient heuristics and intelligent
learning techniques are essential. In this dissertation, we propose a novel extensibility relation
between search states and a learning framework that aids in identifying non-trivial redundant
search states during the branch-and-bound search procedure. Further, we also propose a

probability based heuristic to guide our learning technique. First, we utilize this framework
in a branch-and-bound based preimage computation engine. Next, we show that it can be used
to perform an upper-approximation based state space traversal, which is essential to handle
industrial-scale hardware designs. Finally, we propose a simple but elegant image extraction
technique that utilizes our learning framework to compute over-approximate image space.
This image computation is later leveraged to create an abstraction-refinement based model
checking framework.
During Manufacturing Test, test patterns are applied to the fabricated system, in a test
environment, to check for the existence of fabrication defects. Such patterns are usually
generated by Automatic Test Pattern Generation (ATPG) techniques, which assume certain
fault types to model arbitrary defects. The size of fault list and test set has a major impact
on the economics of manufacturing test. Towards this end, we propose a fault collapsing
approach to compact the size of target fault list for ATPG techniques. Further, from the
very beginning, ATPG techniques were based on branch-and-bound procedures that model the
problem in a Boolean domain. However, ATPG is a problem in the multi-valued domain; thus
we propose a multi-valued ATPG framework to utilize this underlying nature. We also employ
our learning technique for branch-and-bound procedures in this multi-valued framework.
To improve the yield for high-volume manufacturing, silicon diagnosis identifies a set of can-
didate defect locations in a faulty chip. Subsequently physical failure analysis - an extremely
time consuming step - utilizes these candidates as an aid to locate the defects. To reduce
the number of candidates returned to the physical failure analysis step, efficient diagnostic
patterns are essential. Towards this objective, we propose an incremental framework that
utilizes our learning technique for a branch-and-bound procedure. Further, it learns from
iii

the ATPG phase where detection-patterns are generated and utilizes this information during
diagnostic-pattern generation. Finally, we present a probability based heuristic for X-filling of
detection-patterns with the objective of enhancing the diagnostic resolution of such patterns.
We unify these techniques into a framework for test pattern generation with good detection
and diagnostic ability. Overall, we propose a learning framework that can speed up design
verification, test and diagnosis steps in the life cycle of a hardware system.
iv

To my beloved family
- parents, brother, Rajani, Pavan and Yuvan
v

Acknowledgments
It is a honor to acknowledge all the people who made this dissertation possible. I owe my
deepest gratitude to my advisor Dr. Michael S. Hsiao for his immense patience in listening
to my not so well cooked ideas and for his smart guidance through out my graduate life. I
am also greatly indebted to my brother Kamesh for introducing me to Dr. Hsiao. I would
like to thank Dr. Dong S. Ha, Dr. Ezra A. Brown, Dr. Allen B. MacKenzie and Dr. Sandeep
K. Shukla for serving on my thesis committee.
I would like to acknowledge Prof. Tom Walker for providing me with an opportunity to
teach Freshmen during my stay at Virginia Tech. I would like to thank Lila B. Wills and
Prof. Vinod K. Lohani for their timely financial support. I would also like to express my
sincere gratitude to the staff at Virginia Tech for helping me in my paper work. Last though
not least, I would like to thank my family, friends and relatives for their emotional support
and encouragement.
Maheshwar Chandrasekar
September 2010
vi

Contents
1 Introduction 1
1.1 Design Verification . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.1.1 Symbolic Model Checking . . . . . . . . . . . . . . . . . . . . . . . . 4
1.1.2 State Reduction Techniques for Model Checking . . . . . . . . . . . . 5
1.2 Manufacturing Test . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.2.1 Fault Collapsing and Test Generation . . . . . . . . . . . . . . . . . . 6
1.2.2 Automatic Diagnostic Test Generation . . . . . . . . . . . . . . . . . 8
1.3 Dissertation Organization . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2 Background 12
2.1 Symbolic Model Checking . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.1.1 State Space Traversal . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
vii

2.1.2 Preimage Computation Model . . . . . . . . . . . . . . . . . . . . . . 16
2.1.3 Bounded and Unbounded Model Checking . . . . . . . . . . . . . . . 16
2.1.4 Over-approximate State Space Traversal . . . . . . . . . . . . . . . . 18
2.2 Automatic Test Generation . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.2.1 Fault Collapsing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.2.2 Detection and Diagnostic Test Generation . . . . . . . . . . . . . . . 21
2.2.3 ADTG Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.3 Other Related concepts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
2.3.1 Basic Definitions/Terminology . . . . . . . . . . . . . . . . . . . . . . 24
2.3.2 Antecedent Tracing . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
3 Symbolic Model Checking 29
3.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
3.2 Preliminaries . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
3.2.1 Preimage Computation Example . . . . . . . . . . . . . . . . . . . . 31
3.2.2 Terminology . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
3.3 Search State Extensibility Driven Learning . . . . . . . . . . . . . . . . . . . 34
3.3.1 Motivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
viii

3.3.2 The Proposed Learning . . . . . . . . . . . . . . . . . . . . . . . . . . 39
3.3.3 Over-approximated Preimage . . . . . . . . . . . . . . . . . . . . . . 43
3.3.4 Computing the exact pre-image - Implementation Details . . . . . . . 46
3.3.5 Related Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
3.3.6 Heuristic for guiding AT . . . . . . . . . . . . . . . . . . . . . . . . . 48
3.4 Experimental Evaluation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
3.4.1 Setup . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
3.4.2 Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
3.5 Chapter Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
4 Tight Image Extraction for Model Checking 57
4.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
4.2 Preliminaries . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
4.3 Our Model Checking Approach based on Image Extraction . . . . . . . . . . 64
4.3.1 Motivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
4.3.2 Image Extraction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
4.4 CEGAR Framework with our Learning . . . . . . . . . . . . . . . . . . . . . 67
4.4.1 CEGAR Framework - overall approach . . . . . . . . . . . . . . . . . 71
ix

4.5 Experimental Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
4.6 Chapter Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
5 Fault Collapsing and Test Generation 76
5.1 Fault Collapsing based on a Novel Extensibility Relation . . . . . . . . . . . 77
5.1.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
5.1.2 Preliminaries . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
5.1.3 Extensibility based Dominance Analysis . . . . . . . . . . . . . . . . 83
5.1.4 Algorithm and Implementation Details . . . . . . . . . . . . . . . . . 88
5.1.5 Experimental Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . 90
5.1.6 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
5.2 Multi-Valued SAT-based ATPG . . . . . . . . . . . . . . . . . . . . . . . . . 97
5.2.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
5.2.2 Preliminaries . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
5.2.3 Multi-Valued SAT Framework for ATPG . . . . . . . . . . . . . . . . 104
5.2.4 Search State Based Learning . . . . . . . . . . . . . . . . . . . . . . . 107
5.2.5 Experimental Results . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
5.2.6 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116
x

5.3 Chapter Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116
6 Diagnostic Test Generation 117
6.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
6.2 Related Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
6.2.1 E-Frontier based learning . . . . . . . . . . . . . . . . . . . . . . . . . 120
6.2.2 Output Deviation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
6.3 Our Proposed Learning Framework . . . . . . . . . . . . . . . . . . . . . . . 124
6.3.1 Success Driven Learning (SDL) based on Search State Extensibility . 124
6.3.2 Conflict Driven Learning (CDL) based on Search State Extensibility . 127
6.3.3 Learning Framework for ADTG . . . . . . . . . . . . . . . . . . . . . 132
6.3.4 Incremental Learning . . . . . . . . . . . . . . . . . . . . . . . . . . . 133
6.4 Output Deviation based X-filling . . . . . . . . . . . . . . . . . . . . . . . . 134
6.5 Experimental Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135
6.5.1 Incremental Learning Framework . . . . . . . . . . . . . . . . . . . . 136
6.5.2 Output Deviation based X-filling . . . . . . . . . . . . . . . . . . . . 138
6.6 Chapter Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 140
xi

7 Conclusion 142
Bibliography 145
xii

List of Figures
1.1 Hardware System Production Life Cycle . . . . . . . . . . . . . . . . . . . . 2
2.1 Example FSM and Preimage Computation . . . . . . . . . . . . . . . . . . . 14
2.2 Preimage Computation Model. . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.3 Model for Bounded Model Checking . . . . . . . . . . . . . . . . . . . . . . . 17
2.4 Split Circuit Model for Test Generation . . . . . . . . . . . . . . . . . . . . . 22
2.5 ADTG Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
2.6 Success-driven learning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3.1 Example Circuit and DT for Preimage Computation . . . . . . . . . . . . . 33
3.2 DT showing non-trivial redundant search states . . . . . . . . . . . . . . . . 36
3.3 Search State Extensibility Based Learning . . . . . . . . . . . . . . . . . . . 40
3.4 Preimage Computation based on Search State Extensibility . . . . . . . . . . 45
xiii

3.5 Probabilistic heuristic to guide AT . . . . . . . . . . . . . . . . . . . . . . . 48
4.1 Venn Diagram showing over-approximation of Reachable State Space . . . . 58
4.2 Model for Interpolation-based Model Checking . . . . . . . . . . . . . . . . . 61
4.3 Decision Tree for BMCk(I, Tk, F ) . . . . . . . . . . . . . . . . . . . . . . . . 64
4.4 Missed Image cubes due to Non-chronological Backtracking . . . . . . . . . . 68
5.1 Extensibility based dominance analysis . . . . . . . . . . . . . . . . . . . . . 84
5.2 Special case of detection dominance . . . . . . . . . . . . . . . . . . . . . . . 86
5.3 Cut-sets in the Search Space. . . . . . . . . . . . . . . . . . . . . . . . . . . 103
5.4 Multi-Valued Clauses . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
5.5 Example Circuit 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
5.6 Multi-Valued clauses for k s@1 . . . . . . . . . . . . . . . . . . . . . . . . . . 106
5.7 Decision Tree . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
5.8 Example Circuit 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
5.9 Decision Tree . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112
6.1 ADTG Flow . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
6.2 False Positive in SDL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
xiv

6.3 Conflict Driven Learning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 128
6.4 False Negative in CDL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130
6.5 Proposed ADTG Flow . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133
xv

List of Tables
3.1 Comparison with SAT/ATPG-based approaches . . . . . . . . . . . . . . . . 53
3.2 Comparison with Cofactor-based approaches . . . . . . . . . . . . . . . . . . 53
4.1 Our Image Extraction vs. Interpolation . . . . . . . . . . . . . . . . . . . . . 74
5.1 EXTRACTOR vs.GRADER [124]- ISCAS85 [76] . . . . . . . . . . . . . . . 91
5.2 EXTRACTOR vs.GRADER [124] for full-scan ISCAS89 [77] . . . . . . . . . 92
5.3 Resource Usage for ISCAS85 Benchmark . . . . . . . . . . . . . . . . . . . . 93
5.4 Resource Usage for full-scan ISCAS89 Benchmark . . . . . . . . . . . . . . . 94
5.5 Efficiency of Our Algorithm . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
6.1 Original Flow vs. Proposed Flow . . . . . . . . . . . . . . . . . . . . . . . . 135
6.2 Output Deviation based X-fill vs. Random X-fill . . . . . . . . . . . . . . . . 139
xvi

Chapter 1
Introduction
With the ever-increasing design complexity and shrinking feature sizes several errors may
manifest in the manufactured digital system (VLSI circuit). In general, design errors are re-
ferred to as bugs and fabrication errors as defects. Figure 1.1 illustrates the current industrial
practice for a hardware system production life-cycle. To ensure error-free hardware systems
it is essential to verify the design for bugs (Phase II in Figure 1.1) and to test the fabricated
chips for defects (Phase IV in Figure 1.1). Both these phases usually provide feedback to
design/manufacturing engineers. This feedback is then used as an aid by the engineers to
fix the errors.
1

Maheshwar Chandrasekar Chapter 1. Introduction 2
Figure 1.1: Hardware System Production Life Cycle
1.1 Design Verification
Design verification is the process of ensuring if a given implementation adheres to its spec-
ification. In today’s design cycle, more than 70% [98] of the resources are spent in design
verification. The two techniques for design verification are Simulation-based Verification
and Formal Verification. In the former, designs are extensively simulated to check for failure
of pre-determined design assertions. In the latter, mathematical models and analysis are
employed to either prove or disprove the conformance of a design to its specification or a
given property. Although Simulation-based Verification can increase confidence in the de-
sign, only Formal Verification can ensure the correctness of a design (with respect to the
specification/property used). Model Checking is the most widely known technique for For-
mal Verification of digital designs [99]. The two types of Model Checking are Equivalence
Checking and Property Checking. Equivalence checking, in general, checks if a given imple-

Maheshwar Chandrasekar Chapter 1. Introduction 3
mentation model is equivalent to its specification (golden) model. Pragmatically, in the VLSI
circuit production life-cycle, Equivalence Checking is used to determine if an unoptimized
design is equivalent to its optimized version. Although it works well with combinational op-
timizations, researchers are still in pursuit of effective equivalence checking techniques that
can robustly verify sequential optimizations (like different state encoding and aggressive re-
timing) for large-scale designs. On the other hand, Property Checking techniques verify
properties on the optimized designs. The properties are usually obtained from the design
specification or designers. By verifying several essential properties on the optimized design,
designers can ensure that the Design Under Verification (DUV) indeed conforms to its spec-
ification. Equivalence Checking can be viewed as a special case of Property Checking, where
the property is the assertion that the optimized and unoptimized versions are equivalent.
In the sequel, we will refer to Property Checking as Model Checking in general. To verify
properties on the design, efficient state space traversal engines are needed. In the infancy
of Model Checking explicit state space exploration was utilized. However, with increasing
design complexity the number of state variables increased significantly. Hence explicit state
traversal methods cannot scale to current large-size industrial designs due to the enormous
number of states in them. This is usually referred to as the state explosion issue and in
order to overcome this, symbolic methods, where implicit state traversal is performed, are
essential.

Maheshwar Chandrasekar Chapter 1. Introduction 4
1.1.1 Symbolic Model Checking
Currently, Symbolic Model Checking (SMC) approaches are widely used for formal verifica-
tion of hardware systems. At the heart of such approaches lies an efficient image (preim-
age) computation engine that performs an implicit state space traversal. Essentially, image
(preimage) computation involves the generation of the set of all next (previous) states that
can be visited from a given set of states in one cycle. In [74], McMillan proposed the
first symbolic method based on Reduced Ordered BDDs (ROBDDs) for implicit state space
traversal. He was able to model check small to medium sized designs using his approach.
However, his technique did not scale to large designs since ROBDDs may explode in space
for such designs. Later, SAT/ATPG based approaches [42,38,44,45,87,90,91] were proposed
as an alternative to ROBDD based methods. These approaches trade-off space with time;
they may explode in time. In order to avoid time explosion, it is necessary to avoid visiting
already explored (redundant) search states during the state space traversal.
In our work, we propose a novel learning technique based on a new notion of search state ex-
tensibility. Our technique will help in identifying several non-trivial redundant search states.
We also introduce a probability-based heuristic essential to guide our learning. We incor-
porated the learning technique into an ATPG-based preimage (image) computation engine.
Further, our learning framework facilitates for over-approximate state space traversal, which
can be leveraged to design an unified Model Checking framework.

Maheshwar Chandrasekar Chapter 1. Introduction 5
1.1.2 State Reduction Techniques for Model Checking
Model checking of industrial scale hardware designs is severely limited by the state explosion
problem, even for symbolic methods. To handle this problem, in the past, a number of
methods for state reduction in the model used during verification, have been proposed [81].
Such techniques include symmetry reductions [100,101,102,103,104], partial order reductions
[105,106] and abstraction techniques [107,108,109,110,87]. Techniques based on abstraction
have been shown to be quite promising in tackling state explosion problem for industrial-
scale large sized designs. Such techniques alter the original behavior of the design under
verification in an attempt to reduce verification effort. However, these techniques need
to take care that the altered behavior does not affect its final conclusions on the validity
of properties. The authors in [111, 112] present a detailed survey of the model checking
techniques published in the literature.
1.2 Manufacturing Test
With the greater advances in VLSI design and fabrication technology, several defects that
are hard to detect may manifest in the chip. These defects range from an interconnect line
stuck-at a constant value to shorts and opens in transistors, signals, and vias. For the past
several decades, Manufacturing Test has been a prominent test methodology to screen and
identify defective Integrated Chips (ICs). In this method, test patterns are applied to the
primary inputs of the chip and then the primary outputs are observed. If the expected and

Maheshwar Chandrasekar Chapter 1. Introduction 6
observed output values differ, then it can be concluded that the chip is defective. To this
end, effective test patterns are required. The process of generating such patterns is referred
to as Automatic Test Pattern Generation (ATPG). Further, these patterns are generated
assuming fault-models like stuck-at faults, bridge faults, transition faults and path-delay
faults. Such fault models are essential to represent defects reflecting the physical condition
that causes a circuit to fail to perform in a desired manner [2]. It is widely accepted in both
industry and academia that test patterns generated using single stuck-at fault model can
help in detecting several arbitrary defects. Thus a significant portion of the test patterns
employed during Manufacturing Test are usually generated assuming single stuck-at fault
model.
1.2.1 Fault Collapsing and Test Generation
Fault collapsing is the process of obtaining a compact fault list (CFL) from an uncollapsed
fault list (UFL) by including only a representative fault in CFL for a set of faults in UFL.
The CFL is then given as an input to the ATPG engine. Fault Collapsing is a widely re-
searched topic mainly due to its potential benefits on factors affecting test economics [2, 3].
The two broad types of collapsing are structural and functional collapsing. The former tech-
nique collapses faults in a fanout-free region in the circuit into a smaller representative set
and is usually low-cost. The latter technique has the capacity to identify all fault collapsing
opportunities; however it is usually expensive since it may require an ATPG engine or a SAT
solver. In order to perceive the full benefits of fault collapsing on test economics, it is neces-

Maheshwar Chandrasekar Chapter 1. Introduction 7
sary to design a low-cost fault collapsing engine that can enhance structural fault collapsing
towards results that are achievable by functional fault collapsing. In this dissertation, we
use our novel extensibility notion and unique requirements to test a fault for designing such
a low-cost fault collapsing engine.
In 1966, Roth proposed the D-algorithm [4], which is essentially based on the branch-and-
bound procedure, to generate test patterns for a given combinational circuit. Later, in 1981,
Goel observed that the search space explored by D-algorithm can be significantly reduced
if the decisions during the search are made only on the primary inputs [15]. Subsequently,
there has been a plethora of work proposed in the literature to enhance ATPG like in
[49, 67, 53, 54, 55, 19, 2], to mention a few. Sequential test pattern generation for sequential
circuits is in general hard. To overcome this issue, customary industrial practice is to enhance
the controllability and/or observability of state elements in the circuit for testing purposes.
This version is referred to as the full-scan version of the Circuit Under Test (CUT). Thus
an arbitrary combinational ATPG engine can be employed to generate test patterns for
the full-scan version of the sequential CUT. Prior research work, published so far in the
literature, models the ATPG problem in Boolean domain. However, in reality, ATPG is
a problem in the multi-valued domain ({0, 1, D,D,X}). In this dissertation, we propose a
novel ATPG framework based on multi-valued SAT and attempt to solve the ATPG problem
directly in the multi-valued domain itself. Further, we also integrate powerful search space
pruning techniques that learn from path sensitization conflicts. In recent years, there has
been increased interest in generating diagnostic test patterns that can ideally differentiate

Maheshwar Chandrasekar Chapter 1. Introduction 8
between arbitrary faults in a CUT. The process of generating such diagnostic patterns is
referred to as Automatic Diagnostic Test Generation (ADTG). Note that ATPG attempts to
differentiate a fault-free circuit from a faulty circuit whereas ADTG attempts to differentiate
one faulty circuit from another.
1.2.2 Automatic Diagnostic Test Generation
Test escapes result whenever defective chips pass the test. For both defective chips that are
captured during manufacturing test and those returned test escapes, a process of locating the
defects is needed to improve the yield for high-volume manufacturing. The process of locating
the defect in a defective chip is referred to as silicon diagnosis [1]. The diagnosis process
returns a set of possible defect locations (candidates) in a defective chip. Subsequently,
physical failure analysis - an extremely time consuming process - is performed on the failed
chips with the aid of these candidates. For efficient physical analysis, cardinality of the
candidate set should be as small as possible [2]. To this end, diagnostic test patterns that
can differentiate between different faults (candidates) are critical.
In the literature, several complete ADTG algorithms [8, 116, 10, 118] have been proposed.
Also, low-cost preprocessors [11, 12, 13, 117] have been proposed to reduce the number of
fault-pairs considered during ADTG. It should be noted that the fault-pairs in the final
candidate set, from silicon diagnosis, are usually either equivalent or hard-to distinguish.
Thus a complete and aggressive ADTG engine is necessary. In our work, we propose an

Maheshwar Chandrasekar Chapter 1. Introduction 9
efficient ADTG engine with the ability to prune non-trivial redundant search states. This is
again based on the notion of search state extensibility. Further, we propose an incremental
learning framework, where the information learned during ATPG is efficiently utilized during
ADTG. Finally, the number of specified bits in a generated test pattern is usually low. So
we propose a probability-based heuristic to fill the unspecified bits in the ATPG patterns
with the objective of enhancing the diagnostic-ability of such patterns.
1.3 Dissertation Organization
Chapter 2 discusses the background and related work necessary to understand the disser-
tation. First, we discuss concepts related to Symbolic Model Checking, where we explain
the model and techniques used for model checking. Next, we explain concepts related to
automatic test generation, viz., fault collapsing and the model used for diagnostic test gen-
eration. Finally, we present the basic definitions and antecedent tracing technique that will
be used in the rest of the dissertation.
In Chapter 3, we first elicit the previous work done in Symbolic Model Checking. Second,
we introduce our novel extensibility relation between a pair of search states. Next, based on
this extensibility relation, we present our learning framework for preimage computation with
a proof for its soundness and completeness. Further, we also introduce our probability-based
heuristic to guide the learning framework. Finally, we also discuss the unified model checking
framework based on our preimage computation engine.

Maheshwar Chandrasekar Chapter 1. Introduction 10
Chapter 4 discusses the prior literature work on over-approximate state space traversal based
model checking. Next, it presents our image extraction technique. This technique, unlike
existing methods (like those based on interpolation), attempts to implicitly compute an
over-approximate image during the branch-and-bound search performed for bounded model
checking. We incorporate our extensibility based learning framework for the branch-and-
bound search and prove that the over-approximate image obtained by our technique is indeed
an interpolant. Further, if the search excites multiple unsatisfiable cores, that may inherently
exist in the problem, then our over-approximate image may be tighter than those obtained
by interpolation methods, which usually uses only a single unsatisfiable core. Finally, using
our image extraction technique, we present an abstraction-refinement based model checking
framework.
Chapter 5 first surveys the prior work in fault collapsing and test generation. Next, we
present an efficient fault collapsing technique based on our novel extensibility relation and
unique requirements to test a fault. We also present a simple but elegant method to store
these pre-computed unique requirements, which significantly reduces the necessary memory
capacity. Finally, in this chapter, we observe that test generation is inherently a multi-
valued problem; however, existing test generation techniques attempt to solve it in Boolean
domain. So we present a novel multi-valued ATPG framework for test generation along with
a powerful technique that learns on sensitization conflicts.
Chapter 6 first discusses the previous work in Diagnostic Test Generation. Second, it explains
our search state extensibility based learning framework for automatic test generation. Next,

Maheshwar Chandrasekar Chapter 1. Introduction 11
we show that this framework can be employed for diagnostic test generation too. Further,
we propose an incremental learning framework that employs the information learned during
detection-oriented test generation in diagnostic-oriented test generation. Finally, we propose
an output-deviation based probabilistic heuristic to fill the unspecified bits in a test pattern
with the objective of enhancing its diagnostic ability.
Chapter 7 concludes our contributions in this dissertation.

Chapter 2
Background
In this chapter, we explain the necessary background to understand our contribution in the
area of Symbolic Model Checking (SMC) and Automatic Test Generation (ATG). First, we
discuss the related concepts in SMC. Next, we explain the background for ATG. Finally, we
discuss other concepts related to our work.
2.1 Symbolic Model Checking
The three basic aspects of any Symbolic Model Checking technique are (i) the model used
for design representation, (ii) language used for property specification and (iii) the method
employed for verification. In this dissertation, we are interested in gate level representation of
the hardware design and temporal logic for verifying safety properties. Note that a property
P is a safety property in a synchronous sequential design D if and only if D is P-safe (i.e.) P
12

Maheshwar Chandrasekar Chapter 2. Background 13
holds true in the reachable state space of D. We refer the reader to [99,98,74] for a detailed
discussion on model representation, property specification language and different types of
properties. The core of any SMC approach is the preimage and/or image computation
technique used for state space traversal during property checking. These techniques are dual
to each other; in the rest of this chapter, we will be referring to preimage computation to
keep our discussion simple.
2.1.1 State Space Traversal
A synchronous sequential design D can be represented by a Mealy-type Deterministic Finite
State Machine (FSM). A FSM M is formally defined [72] as a 5-tuple < Σ, Q, δ,Q0, F >,
where
• Σ represents the primary input variables (I), primary output variables (O) and state
variables (S),
• Q represents the finite set of states in M defined over the variables in S,
• δ : represents the transition function Q × I ⇒ Q,
• Q0 ⊆ Q is the set of initial states of M , and
• F : Q × I ⇒ O is the output function
For ease of discussion, we assume that the property is defined on the state variables (S)
of the design D. However, generalization of the approach to a property on any internal

Maheshwar Chandrasekar Chapter 2. Background 14
����������
����������
��������������������
�
������ �����������
������ �����������
���
���
���
���
���
���
���
�������� ���������
����������������������������� !����"�
#������$����%� ��&"������� �������������������������
Figure 2.1: Example FSM and Preimage Computation
variables of D is straight-forward. The pre-image of a set of states B (property) ⊆ Q is
the set of states A ⊆ Q from which there is at least one path to a state in B in the FSM
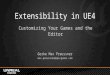
M . Figure 2.1A shows the FSM of a sequential design, which has three state variables.
The value within each state represent the state variables encoding . Figure 2.1B shows the
iterative pre-image computation steps for B = {000, 110}. In each iteration, we include
only the newly visited states in the pre-image. Since the total number of states that can be
defined on n state variables is bounded by a finite number the pre-image computation will
eventually halt with no new states to be added to the pre-image set. This is referred to as
the fix-point. In the sequel, unless specified, we use pre-image to refer to an iteration in the
fix-point computation.
For pre-image computation, we are interested in the transition relation between next state
(Y ) and present state variables (X). Let δTR represent the transition relation for D. It is

Maheshwar Chandrasekar Chapter 2. Background 15
defined as
δTR(X, I, Y ) =∧
y∈Y
(y ≡ δy(X, I)) (2.1)
where
• X/Y are present/next state variables and
• δy is the next state relation of next state variable y ∈ Y with the present state variables
in X.
Formally, pre-image of a set of states B (defined over Y variables) is defined as
Preimage(B) = ∃I,Y δTR(X, I, Y ) ∧ B. (2.2)
(I)
Primary
Presentstate
Inputs
(X)Variables
Objectiveout=1
out(B)
(Y)VariablesstateNext
δTR(X, I, Y )
Figure 2.2: Preimage Computation Model.

Maheshwar Chandrasekar Chapter 2. Background 16
2.1.2 Preimage Computation Model
Note that B is the characteristic function of the set of the states (Q), represented as a
function defined over the primary inputs I and the present state variables X. Thus we can
represent the right hand side of Equation 2.2 simply as the monitor circuit shown in Figure
2.2. Now, in order to obtain Preimage(B), we need to compute the assignments to the
present state variables X for which there exists an assignment to the inputs I such that the
single output out in the monitor is set true. The set of all such assignments on X represents
the Preimage(B). In our work, we use this model for pre-image computation. For image
computation a similar model can be constructed. However, note that the states for which
image needs to be computed must be asserted on the present state variables X.
2.1.3 Bounded and Unbounded Model Checking
Bounded model checking (BMCk) attempts to verify the underlying design for a fixed bound
k. This bound defines the length of state paths (formed by state transitions) from the initial
state of the design. Thus BMCk cannot conclude on the property validity beyond the bound
k. In other words, it can only detect a counter-example (if any) of length less than or equal
to k. In general, the BMCk model for a sequential design D shown in Figure 2.3A can be
represented as shown in Figure 2.3B. Here, the design D is unrolled for k time-frames and
the initial state is asserted on state variables on the left side of the first time-frame. Further,
a monitor sub-circuit asserts that the negation of the property (P ) can be reached in at least

Maheshwar Chandrasekar Chapter 2. Background 17
������
����� ����� �
� � �
��� ��� ���
����� � � �������� �"! � ��!#� � �
� $�%���$&� ��� ')(* � �+!#� � �� �
,#- . /1023- 4#/65
798 ��$ %:��$&� ��� ')( * � �+!� � � ; 8 ; ������<�$)<=�>��<�$ ( *�?�$�!#@ � � A � �CB �D' ��!�$E� F( $�� A � ?G@
H IJ KLIM
N OPQR STHNU
H IJ KLIM
V QR PQR STHVU
� � � � � � � �W��3�
Figure 2.3: Model for Bounded Model Checking
one of the k time-frames. If this formulation is satisfiable then it implies that there exists
a counter-example, which can be extracted from the satisfiable assignment. Otherwise, it
can be concluded that the design D is P-safe within the bound k. It has been shown that
bounded model checking is extremely beneficial in generating counter-examples for industrial
designs, especially in the error-prone early stages of design life-cycle.
If no counter-example is found in BMCk, in order to make the model checking approach
a complete algorithm, one increments the bound k to perform BMCk+1. This process of
incrementing the bound is continued until either the problem becomes intractable (resource
exhaustion) or a completeness threshold CT is reached. CT is a number which helps in

Maheshwar Chandrasekar Chapter 2. Background 18
concluding that D is P-safe, if P is valid in BMCCT . In general, CT is defined as a
function of the design diameter (length of the longest ‘shortest path’ between any 2 states).
Computing CT is as hard as model checking itself; to overcome this issue fix-point checks are
employed during state space traversal (image computation of initial state and/or preimage
computation of property negation) for termination condition. This process of proving that
D is P-safe is referred to as unbounded model checking. We refer the reader to [113] for a
survey of techniques for state space traversal and model checking proposed in the literature.
2.1.4 Over-approximate State Space Traversal
In the recent past, design abstraction - removal of design behavior irrelevant to proving
a given property - has been shown to be effective in overcoming the state-explosion issue.
Abstraction, in general, can be either over-approximate or under-approximate. In the former,
false-negative cases can occur - a spurious counter-example illustrating a trace from the initial
state to a state violating the property in the design may be identified. Similarly, in the later
false-positive cases can occur. In other words, identification of a counter-example in the
under-approximated model guarantees the existence of a counter-example in the original
design. However, no counter-example in the under-approximated model does not guarantee
that the target property holds in the original design. In the real-world, abstraction-based
model checking is essential to handle large-scale industrial sized designs. In [81], an automatic
Counter-Example Guided Abstraction Refinement (CEGAR) framework was proposed; this
framework provided for the verification of an industrial design. In [87], the authors proposed

Maheshwar Chandrasekar Chapter 2. Background 19
an interesting abstraction technique based on Craig interpolants [86]. Essentially, they utilize
the proof-logging capability of modern-day SAT solvers like [95, 96] for unsatisfiable runs.
These proofs can then be used to obtain an over-approximate reachable state space of the
system. Given this possibility, the basic idea is to make use of the proofs from unsatisfiable
BMC runs to determine an over-approximate image/preimage state set. This approach,
unlike previous SAT-based methods like [89], is bounded by the longest shortest path between
any two states. Although this can be significantly longer than the diameter of the DUV’s
reachable state space, this approach was shown to be effective on several large verification
instances. However, Craig interpolant-based method suffers from two major drawbacks - the
computed interpolants representing over-approximate state space may be highly redundant
and the over-approximations may not be tighter. Recently in [90, 91], the authors proposed
to integrate over-approximations obtained from other than unsatisfiable proofs, like those
based on relationships between state variables, within the Craig interpolant-based model
checking framework. However, even more tighter abstractions are necessary for verifying
industrial sized designs.
2.2 Automatic Test Generation
To ensure defect free chips and higher yield during high-volume manufacturing it is essential
to generate effective test patterns. The process of automatically generating test patterns
is usually referred to as automatic test generation. Test patterns are usually generated to

Maheshwar Chandrasekar Chapter 2. Background 20
test the circuit for its functionality and timing at various levels of design abstraction that
include behavioral (architecture), register-transfer, logical (gate) and physical (transistor)
levels [2]. Fault models to represent arbitrary defects are necessary for automatic test gen-
eration and for quantitative analysis of generated test patterns. A good fault model should
satisfy two criteria: (i) it should reflect the defect behavior accurately and (ii) it should be
computationally inexpensive in terms of test generation (and fault simulation). A number
of fault models like stuck-at fault, bridge fault, transition fault and path delay fault have
been published in the literature. Further, based on the fault multiplicity used to represent
defects in the circuit, there are two types of fault models - single and multiple fault model.
Although the latter can accurately model defects in the circuit, the number of such faults
may be significantly large for industrial scale circuits. Fortunately, it was shown in [3] that
high fault coverage 1 obtained under single fault model will yield a high fault coverage in
multiple fault model as well. Thus, in industry, typically single fault model is used for test
generation. In our work, we focus on functional test generation at logical level using single
stuck-at fault model.
2.2.1 Fault Collapsing
Typically a set of faults (fault-list) is given as an input to an automatic test generator for
test pattern generation. The size of this fault-list has a direct impact on the computational
complexity of the test generator and test set size returned by it. Fortunately, a single test
1Fault coverage for a test set T = (Number of faults detected by T)/ (Total Number of faults)

Maheshwar Chandrasekar Chapter 2. Background 21
vector t for a fault f can serve as a test for several other distinct faults in the fault-list.
Thus it is sufficient to include just f in the fault-list, as a representative fault, excluding
other faults that can be tested with t. However, this is beneficial, if and only if the test
generator includes vector t in the final test set T . Otherwise, certain excluded faults may
not have a test in T . The process of eliminating faults from the fault-list is referred to as fault
collapsing. A number of fault collapsing approaches have been proposed in the literature.
These include fault equivalence based collapsing [114,115,116,117,118,128], fault dominance
based collapsing [119, 120, 121, 122, 124] and fault concurrence based collapsing [125, 126].
Of these, collapsing approaches based on the former two have been widely studied and
incorporated in several commercial test generation packages. The problem of identifying a
representative fault f , for eliminating a set of faults from fault-list, can be as hard as test
generation for f itself. Thus, low cost mechanisms for identifying most of the collapsing
opportunities are essential.
2.2.2 Detection and Diagnostic Test Generation
Conventional test generation techniques [4, 15, 53, 19, 54] are based on branch-and-bound
procedure and either explicitly or implicitly utilize the split circuit model [129]. Cheng
showed that the D-algorithm performed better with the split circuit model than with just 5-
valued or 9-valued model. Figure 2.4 illustrates a conceptual representation of this model for
test generation. It uses two versions of the circuit - a fault-free version and a faulty-version
which is injected with the fault f for which a test needs to be generated. The corresponding

Maheshwar Chandrasekar Chapter 2. Background 22
XZYF[F\ ]�^_a`3b�c�[�` ]
`d:be`gfhYFb+^ikjmlm[&]�nGopd�irq
X#YF[�\ ]�s+t�b�u:u_a`gbvc�[�` ]X#YF[m\ ]wt
Figure 2.4: Split Circuit Model for Test Generation
outputs in these two versions are XOR’ed and an OR gate with all these XOR gates as
inputs is added to the model. Since primary inputs are shared between the two versions, any
assignment to the primary inputs that can imply a logic 1 on the OR gate is a test vector
for f .
Traditionally, test generation was performed with the objective of differentiating a fault
free machine from a faulty machine. Since test generation is a problem in the multi-valued
domain (like 5-valued or 9-valued) conventional techniques encode the problem into Boolean
domain. In recent years, there has been renewed interest in diagnostic test generation with
application to silicon diagnosis - the process of locating defect sites in defective chips. The
diagnostic test patterns are generated by distinguishing one faulty circuit from another. In
the literature different models for diagnostic test generation have been proposed [8,116,10].
In [118], the authors proposed to use a single pass ATPG to perform ADTG for a given

Maheshwar Chandrasekar Chapter 2. Background 23
fault-pair. In our ADTG engine we employ this ADTG model and it is described next.
2.2.3 ADTG Model
In [118], the authors proposed a novel circuit model for ADTG. Without loss of generality,
consider a fault-pair (f0, f1). Let f0 be the line B → C stuck-at 1 (sa− 1) and f1 be the line
D → F sa − 0 in Figure 2.5A. Now, they introduce two multiplexers with a common select
line S (new primary input) at the two fault sites as shown in Figure 2.5B. The key is that
the original signals - line B → C and line D → F - are connected to the opposing polarity
inputs in the two MUXes. For example, in Figure 2.5B, the line B → C is connected to the
1-input of MUX M0 and the line D → F is connected to the 0-input of MUX M1. Further,
constants representing the faulty values at their respective fault sites are connected to the
remaining input port of both the MUXes. In Figure 2.5B, a constant 1 is connected to the
0-input of MUX M0 and a constant 0 is connected to the 1-input of MUX M1. When the
select line S = 0, the circuit can be simulated under the presence of fault f0. Similarly, the
circuit can be simulated under the presence of fault f1 when S = 1. Note that the fault-free
circuit is absent in this model. Thus, if an ATPG engine returns a test vector t for the
select line S stuck-at-0 (or equivalently for S sa− 1), then t is a diagnostic pattern that can
distinguish the fault-pair (f0, f1). On the contrary, if the ATPG engine exhausts the search
space and returns that the fault on select line S (either sa− 0 or sa− 1) is untestable, then
the fault-pair (f0, f1) is indistinguishable. Overall, this construction allows the ADTG to
leverage the advances made in conventional ATPG engine to prove the fault-equivalence or

Maheshwar Chandrasekar Chapter 2. Background 24
Figure 2.5: ADTG Model
generate a diagnostic pattern for a given fault-pair in an atomic step.
2.3 Other Related concepts
2.3.1 Basic Definitions/Terminology
The operation of an ATPG engine such as PODEM [15] can be regarded as a systematic
and intelligent search of all possible Boolean assignments on the (pseudo) primary inputs
in the DUV/CUT. This systematic search conceptually builds a binary tree often referred
to as the decision tree (DT ). Each node N in the DT is characterized by its decision level
d(N). Note that node N corresponds to a (pseudo) primary input in the DUV/CUT. In
the search process, a decision is referred to as a selective Boolean assignment to the node
N . A decision (say on node N), along with a set of previously assigned nodes (obtained due

Maheshwar Chandrasekar Chapter 2. Background 25
to the decisions made before node N) in the DUV/CUT, may imply an internal gate G in
the DUV/CUT to a value v. For this implication, we say that G is implied at the decision
level d(N). The set of gate assignments in the DUV/CUT that imply G = v is referred
to as the antecedents of G = v. Note that, by definition, none of the gate assignments in
the antecedents of G = v is assigned at a decision level higher than d(N). Further, each
implication is defined by the input-output relationship of gates in the DUV/CUT. In the
sequel, we use Gd(N),v to represent that gate G is assigned a value v at decision level d(N).
Also, after each decision, usually a breadth-first traversal of the DUV/CUT is performed to
determine its implications.
• Search State Each decision in the decision tree (DT ) leads the branch-and-bound
procedure to a new state and is referred to as the search state.
• Search State Representation A naive way to represent a search state SS is by
the sequence of decisions in the DT that leads to SS. Let this set of assignments be
represented by A. The frontier of assigned nodes in the DUV/CUT (obtained by the
implications of A) can also be used to represent the search state SS. This frontier of
assigned nodes is referred to as cutset in [38, 68, 45] and E-frontier in [50].
• Search State Classification We classify SS into three types - conflict, success and
intermediate. A conflict search state occurs when there exists no other assignments to
yet to be decided (pseudo) primary inputs such that the objective of the ATPG-engine
can be satisfied. A success search state occurs when the objective of the ATPG-engine

Maheshwar Chandrasekar Chapter 2. Background 26
xCy z3y
{v|�}�~{v|�}g�{v|�}��{v|�}g�{v|�}��{v|�}g�{v|�}��
x�� �x � �x�� �x � �x y �
x y � � x�� �W� x � �Wy x � � ��"�g�g�
xCy � xCy �x y �xCy �
x y �x � �
x�� �x � �
���C�)� � �6�v��� �������� �g� ��m¡£¢6¤e¥�¡e� ¦ ¡e§�� �
¨C��©�ª3«C¬v�®°¯±
x y �xCy �
xCy �² � © ª3³ ¬v�®�´
xCy �xCy �x y �
±pµ"¶ ·�¸ ¹ µ"º»p¼+½�¾À¿ÂÁÂÃÀıeµ"¶ ¹ Å ¿�ÁÂÃ�Æ
Ç�È+É+È ºÂÅ Á
±{v|�}k{£Ê�Ë�Ì ÍkÌ Î°Ï6|rÊkÐrÊ°Ñ
{v|�}��{v|°}g�{v|�}��
Figure 2.6: Success-driven learning
is satisfied; an intermediate search state is one which may lead to either a success or
conflict search state based on the future decisions in the search process. For instance,
suppose the objective of the ATPG-engine is to generate a test pattern. Then a conflict
state occurs if there is no X-path to propagate the fault effect to a primary output.
Further, a success state occurs if a fault effect is propagated to at least one primary
output. Finally, SS is usually defined by a set of gate assignments. For instance, if
SS is a success search state obtained during test generation then it is represented by
the assignment o = v, where o is the output at which fault effect v is observed. In the
rest of the proposal document, we refer to the search state implied by the current set
of decisions, made by the ATPG-engine during search process, as the current search
state.

Maheshwar Chandrasekar Chapter 2. Background 27
2.3.2 Antecedent Tracing
The basic idea of Antecedent Tracing (AT) was originally published in [46] for path sen-
sitization problem in test generation. Later, it was used in [17, 39] to drastically improve
the performance of modern-day SAT solvers. Here, we briefly explain AT with an example.
Consider the slightly modified partial c432 circuit from ISCAS85 benchmark suite and the
partial DT for the fault primary input G14 sa− 1 shown in Figure 2.6. After the decision at
level 7 (current decision level) the search reaches a success state - fault effect is observed at
the primary output G203. Now, AT can be used to determine the antecedents of this success
state. Essentially, we backward traverse the CUT from the gate that represents the state
(i.e.) gate G203. During such traversal, we identify the antecedents that were assigned at
the current decision level and schedule them for further backward traversal. We stop when
we reach the primary input that was decided at the current decision level. Further, the
antecedents that were assigned at a level lower than the current decision level are recorded
in a set R. In the considered example, during the backward traversal through G203, the an-
tecedent G5,D202 (G202 = D at level 5) is recorded in the set R and G171 (implied at level 7) is
scheduled for further backward traversal. Next, when traversing through G171, we find that
its antecedent is the primary input decided at the current decision level and the traversal
ends. It can be seen that the assignments in the set R ({G5,D202}) together with the decision
made at the current decision level (G7,034 ) implied the success state G7,D
203 . The authors in [46]
used AT to determine the antecedents for a given conflict state. However, as shown above,
AT can be utilized to determine the antecedents of any given state, whether success, conflict

Maheshwar Chandrasekar Chapter 2. Background 28
or intermediate state - defined by a set of gate assignments. Further, they use AT only to
determine the non-chronological backtrack level. In our learning framework, in Sections 3.3
and 6.3, we show that the information learned from AT can be used to identify non-trivial
redundant search states in future search.

Chapter 3
Symbolic Model Checking
3.1 Introduction
Symbolic Model Checking techniques traverses the design state space implicitly to verify if
the Design Under Verification (DUV) holds a given property. For this purpose, efficient state
space exploration methods are essential. One approach - image computation - starts from
the initial states of the design and attempts to show that no state satisfying the negation of
the property can be reached. A dual to this approach is to compute pre-image of the states
representing the negation of the property until fix-point. If the computed pre-image states
include the initial states then the property is violated; otherwise it can be concluded that
the property is valid provided fix-point is reached. Either way it is essential to efficiently
explore the design state space by avoiding already explored search spaces (redundant search
29

Maheshwar Chandrasekar Chapter 3. Symbolic Model Checking 30
spaces).
Initially Reduced Ordered Binary Decision Diagram (ROBDD) based methods were used for
symbolic state space traversal [74]. These methods were attractive since ROBDDs provide
for a canonical representation of functions and efficient Boolean manipulations. However,
these methods explode in memory for large designs and are thus limited in their applicability.
Although variable ordering and partitioning techniques [30,31,32,33,34] have been proposed
to alleviate this problem, these methods can still result in exponential space complexity for
large designs. Later, graph-based variants [40,41] were proposed to represent the transition
relation as an alternative to BDD-based methods. However, the formula size may still grow
exponentially.
In [71,41], the authors proposed techniques that try to synergistically combine the potentials
of BDD and SAT solvers for state space exploration. However, BDDs are inherently prone
to memory explosion. Subsequently, interest in pure SAT solver based state space traversal
increased. The authors in [75] proposed to use pure SAT-solvers for model checking instead
of BDDs. Later, in [42], McMillan proposed a method to elegantly modify the SAT solvers
to traverse the state space. They use the solutions obtained by SAT-solvers to represent the
state space traversed and refer them as blocking clauses. Finally in [44,45], the authors pro-
posed hybrid-SAT solvers that uses the design information but still works on the conjunctive
normal form representation of the problem. Although these methods avoid the exponential
space complexity, they may potentially explode in time. Thus efficient learning mechanisms
to prune redundant search states are imperative.

Maheshwar Chandrasekar Chapter 3. Symbolic Model Checking 31
In this chapter, our contributions [35, 36, 37] can be summarized as follows:
1. We propose an efficient search state representation that allows us to determine non-
trivial redundant search states. A novel extensibility concept is proposed to facilitate
this process.
2. We show that our learning method can be used to compute over-approximated pre-
image, which may be of interest for certain verification problems like Model Checking
and Pre-silicon Design Debugging.
3. Finally, we propose a probability-based heuristic to guide our learning process.
Outline: Section 3.2 discusses the basic concepts for understanding the rest of the chap-
ter. Section 3.3 discusses our contributions in this chapter and Section 3.4 provides the
experimental evaluation. Finally, we summarize our contributions in Section 3.5.
3.2 Preliminaries
3.2.1 Preimage Computation Example
A systematic way to enumerate all possible assignments on a given set of variables is to
use a branch-and-bound procedure. This procedure conceptually builds a decision tree,
which can also be thought of as a free BDD. In our work, we decide only on the variables
in I and X, unlike the SAT-based methods. This is sufficient to compute the pre-image

Maheshwar Chandrasekar Chapter 3. Symbolic Model Checking 32
since the monitor circuit is a function of these variables. Further, it effectively reduces the
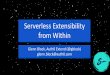
search space that needs to be explored. Figure 3.1B shows the partial decision tree obtained
during pre-image computation for the monitor shown in Figure 3.1A. Let {a, b, d, e} ∈ X
and {c, f, g, q} ∈ I. We recursively build the pre-image bottom-up; the logical expression
to the left of each decision node N in Figure 3.1B represents the pre-image P computed
bottom-up after exploring the search space underneath N in the decision tree. The ITE
operator is used to construct P . Let v represent the variable decided at N . Also, let P0
represent the pre-image obtained for the else decision at N (v = 0) and P1 for the then
decision (v = 1). Now P = ((v ∧ P1)∨
(v ∧ P0)) if v ∈ X; otherwise P = (P1
∨P0) since
v ∈ I and by Equation 2.2 input variables must be existentially quantified in the pre-image.
Note that N represents the sub-tree T underneath it in the decision tree and P represents
the pre-image that is obtained by exploring T . For instance, in the Figure 3.1B, ((d ∧ 1)
∨(d ∧ 1)) (= Constant 1) represents the pre-image that is computed after exploring the
search space under the decision node with v = d. Therefore, if N is the root node of the
decision tree then P will represent the required pre-image.
3.2.2 Terminology
• Redundant Search State Suppose a sequence of decisions A leads to a search state
SS in the DT . Let the sub-tree that needs to be explored in the DT (after SS search
state is obtained) be represented by T . If this sub-tree T was previously explored during
the branch-and-bound procedure then SS is referred to as redundant search state. Also,

Maheshwar Chandrasekar Chapter 3. Symbolic Model Checking 33
�
�
�
��
�
��
�
�
�
�
���
�����������
�����
������������������
�
��
��
�
�
� �
�
� �
��!�������"���#�� �$����#��%� �
������������������
&��� �� ��#��'����#(�
���������������)�� ����
��*�����#��
�
��
+,��-����.�
+��-���
+,��-����.�
+��-���
/�� � �
"�#����/� �0���*
������/� �0����
� �������
� �� ����
� �� #�� ���
Figure 3.1: Example Circuit and DT for Preimage Computation
the search space represented by the sub-tree T is referred to as redundant search space.
Example: The sub-trees that are bold-faced in Figure 3.1B represent redundant search
spaces since these sub-trees have been already explored under decision d. Further,
we refer to the search space represented by T as the search space under SS and the
pre-image computed bottom-up after exploring T as the pre-image under SS.
• Search State Extensibility Consider two search states SS1 and SS2. Let A2 rep-
resent the sequence of assignments in the DT that leads to SS2. We define that SS1
is extensible to SS2 (SS1ExtSS2) if a certain subset (A2′) of assignments in A2 can
lead to SS1. Example: In Figure 3.2, the assignments in curly braces to the right of
each decision node N represent the search state in the DT just before N . Let SS1 =
{k} - search state obtained due to the decision g. Also let SS2 = {n} obtained by A2

Maheshwar Chandrasekar Chapter 3. Symbolic Model Checking 34
= {g, f , q}. Now SS1ExtSS2 since A2′ = {q} leads to SS1.
3.3 Search State Extensibility Driven Learning
3.3.1 Motivation
Branch-and-bound procedures explicitly searches all possible assignments. For efficient
search process, it is imperative to identify redundant search spaces and to direct the solver
to avoid such spaces. SAT and Hybrid-SAT methods [42, 44] use AT and solution-cube en-
largement to prune redundant search states. To avoid exploring previously explored solution
assignments, these methods propose to use AT to determine the reason for the solution.
Then this reason is enlarged to capture several additional solution assignments. However,
the reason is a function of the state variables alone and it prohibits from exploring only the
same assignments on the state variables. In [39, 73], the authors have empirically shown
that the pruning capability of a solver is enhanced if the reason (a cut in the implication
graph IG) learned for a conflict is in proximity to the conflict in the IG. We refer readers
to [39,73] for the notion of proximity. However, the key is that several distinct assignments
on the decision variables can imply the same reason for the conflict. Hence learning a reason
that is close to the conflict in the IG can avoid all such distinct assignments in the future
search.
In [38,68,69,45], the authors propose to represent explored search states using cutsets. They

Maheshwar Chandrasekar Chapter 3. Symbolic Model Checking 35
use an ATPG engine to perform the branch-and-bound procedure. Whenever a learned
cutset LC occurs again, they can readily conclude that the current search state CS is
redundant. To obtain the pre-image under CS they use the pre-image obtained under
the search state represented by LC. Figure 3.2 illustrates the identification of a previously
learned cutset. Suppose the current sequence of decisions is {g, a, d, e}. Then the ATPG-
based methods identify that the cutset obtained for this sequence is the same as that for
{g, a, d} sequence of decisions. Thus they use the pre-image under the decision d (constant
1) as the pre-image under the recent decision e. This allows them to avoid exploring the
search space under the decision e. Note that for the ATPG engine, the monitor circuit
serves as the IG and the cutsets in the monitor are in proximity to the relevant search states
that it represents in the DT . This is unlike the SAT/Hybrid-SAT based methods where
the blocking clauses are defined on the state variables alone. Since different assignments on
the state and input variables can lead to the same cutset (as discussed in the above case)
the ATPG-based methods can determine all such assignments as redundant. However, the
ATPG-based methods require cutsets to be learned at each decision node in the DT . This
may be an overkill on the memory resources and time spent on Boolean reasoning of these
learned cutsets. We explain the motivation for our work using the following example.
Example: Consider the Figure 3.2; in ATPG-based methods, the search state for d decision
is represented by the cutset {k, h, i}. These methods learn that whenever this cutset occurs
again during the subsequent search process, the pre-image under the current search state
will be constant 1. However, antecedent tracing for the decision c identifies that {k, h, c}

Maheshwar Chandrasekar Chapter 3. Symbolic Model Checking 36
�
�
��
��
�
�
� �
�
� �
�
���� ���� �� ���
�� ����
�� �
�
�����������
�������
�� ���
�����������
��������
�
�
� �
����
������
�� ���
������������������
� ���� ����� �� ��������
!"��� ������ ���������
��� � �������
#$%�
#$%&
#$%'
#$%(
$�����
�
#�� ���$���)��%*
�"����$���)��%�
� �"����"�
�"�+����
�"��������
�
�
#$)�#�����"��$����
Figure 3.2: DT showing non-trivial redundant search states

Maheshwar Chandrasekar Chapter 3. Symbolic Model Checking 37
is a sufficient reason (R0) to imply the solution underneath the decision c. Since AT uses
the monitor circuit as the IG we have two choices as we backtrace through gate p when
determining R0. This is because both l and m imply p. We propose a probabilistic heuristic
in Section 3.3.6 for making a decision in such cases; for now let us assume that we backtrace
through gate l. Similarly, the sufficient reason (R1) for the conflict underneath decision c
is {c}. Now, it is obvious that the binary resolution of R0 and R1 - {k, h} - is sufficient to
represent the search state under the decision d. Note that this is a stronger learning since
we learn a smaller set of assignments to represent the search state unlike the cutsets used
in ATPG-based methods. Further, it allows us to perform Non-Chronological backtracking
(NCB) during the branch-and-bound procedure. For the example case discussed, we can
directly backtrack to level 2 and avoid the redundant search space under decision d. The
NCB also helps in significantly reducing the number of learned search states - can avoid
learning the trivial search state at decision level 3 and those under the decision d.
Furthermore, a search state (SS2) is identified as a redundant search state in ATPG-based
methods only when the cutset representing SS2 is equivalent to a previously learned cutset
(for a search state SS1). This may hint that the learning of smaller set of assignments
to represent search states may not be beneficial to the ATPG-based methods.For instance,
let the current search state (SS2) be the one obtained by the set of decisions {g, a, e, b} in
Figure 3.2. It is represented by the cutset {k, h, e}. Since the current ATPG-based methods
determine a mismatch of this cutset with the search state {k, h} (SS1), previously learned
by AT , they do not conclude that the current search state SS2 is a redundant search state.

Maheshwar Chandrasekar Chapter 3. Symbolic Model Checking 38
However, it may be observed that SS1ExtSS2. Further, we have already explored the search
space under SS1. Thus, it is intuitive that SS2 is a redundant search state (formally proved
later). In Figure 3.2, it can be seen that the sub-tree under SS2 is a sub-tree of that under
SS1. Therefore, our search state representation is stronger as it allows us to identify several
non-trivial redundant search states based on search state extensibility. Note that when we
identify the current search state to be redundant, we also need to compute the pre-image
under SS2. This is essential because we build the pre-image bottom-up. We discuss this in
the next section.
Overall, in order to determine non-trivial redundant search states based on search state
extensibility
1. We use AT to determine a smaller set of assignments sufficient to represent a search
state unlike the ATPG-based methods. This succinct representation allows to perform
NCB and thereby significantly reduce the number of learned search states than existing
ATPG-based methods.
2. Based on our search state representation and search state extensibility, we propose a
method to efficiently determine several non-trivial redundant search spaces than exist-
ing methods and prune them. This may effectively reduce the number of enumerations
performed during pre-image computation. We also present a method to compute pre-
image under the current search state when it is determined as a redundant search
state.

Maheshwar Chandrasekar Chapter 3. Symbolic Model Checking 39
3. We propose a probability-based heuristic that directs the AT to make appropriate
choices (if any) as it backtraces through the monitor circuit. Our heuristic is directed
towards obtaining a smaller frequently occurring search state quickly.
3.3.2 The Proposed Learning
Consider a node N in the decision tree DT . Let SS1 be the search state obtained due to
the sequence of decisions on the path from the root of DT until node N . After the sub-tree
T rooted at decision node N in the DT is explored, we use AT to obtain a smaller set of
assignments A that is sufficient to represent the search space represented by T . Thus A is
sufficient to represent SS1. Since we compute the pre-image bottom-up, pre-image P1 for
the search space represented by T will be obtained once it is explored. Now, we learn that
the pre-image under SS1 is P1. In the future search, if a search state SS2 is obtained such
that SS1ExtSS2, we can use P1 to obtain the pre-image P2 under SS2.
We store the learned search states as Boolean clauses and store them in a clause database
DB. For each assignment made during the branch-and-bound procedure, we propagate this
constraint in the DB to see if any learned search state SS1 (in DB) becomes extensible to
the current search state SS2. This Boolean Constraint Propagation can be efficiently done
using a literal-watching scheme [18]. Note that we do not perform any implications learning
in the DB since we are just interested in identifying extensibility relationship among search
states. During the branch-and-bound procedure suppose we determine that a previously

Maheshwar Chandrasekar Chapter 3. Symbolic Model Checking 40
Ò�Ó+ÔÀÓ£Õ�Ö Ö×�Ø�ÙWÚ3ÛgÜeÝgÞ ßWÛràWÜ�ágâã�äkå Þ Ü�ÝgÞ ßWÛkà3Ügáræã ã°äkå çWè Þ äkßé é+ärß ê å Þ ëWèâ éÀä�ßWÙWè ØkßWè3â
ì
í
î ï
ðñ
ò
óôõ�ö
÷Cø�ù Ó+ú°û ü ý°ÓþDÿ û ���
������ î� ��� ì ��� �Wð�õ�� ö
ú
�� � �������
�
� ø
� �
Ö
ø
�
� �
!#"
$
% � & ' � (�)
* + Ø�, + ê , + -#.
% � �/' � & ' � (�)
* ë0, + - .
* ë .
1���2 î�� ö�� î3��4�ì�ð5� 6�� ô�798:� ì6ìFigure 3.3: Search State Extensibility Based Learning
learned search state SS1 is extensible to the current search state SS2. Then SS2 is a
redundant search state. This is formally proved below.
For further discussion, let SS1 be a previously learned search state and SS2 be the current
search state. Let SS1ExtSS2 and A2 be the set of decisions in the DT that imply the
current search state SS2. Let A1 represent the set of decisions that lead to SS1 when it was
learned. Also, let T1 represent the sub-tree in the DT under SS1 and T2 that under SS2.
In the subsequent discussions we refer to out as the single output of the monitor discussed
in Section 2.1.2. Further, consider the following definitions
1. Solution/Conflict cube under a search state SS: A cube m under SS is referred to
as the set of assignments under SS in the DT that leads to a terminal node in the DT .

Maheshwar Chandrasekar Chapter 3. Symbolic Model Checking 41
m is a solution (conflict) cube if the terminal node is a solution (conflict). Example:
Consider Figure 3.3. If SS = {a, f , g} then b is a solution cube and b is a conflict cube.
2. Cofactor of a cube m under a search state SS with respect to an assignment A (mA)
is the cube m restricted to the sub-domain where A is true. Example: Let m = b and
A = {c, b}. Then mA is constant 0 (false). If A = {c} then mA = b. Also, let T be
the sub-tree under SS in the DT . Then we refer to cofactoring each cube in T with
respect to A as cofactoring T with respect to A (TA).
3. Let A and B be two assignments. We say that A and B are inconsistent if A ∧ B
evaluates to constant 0 (false); otherwise they are consistent.
Lemma 1. Let m1 be a solution (conflict) cube under SS1. If m1 and A2 are consistent,
then (m1 ∧ A2) ⇒ out ((m1 ∧ A2) ⇒ out).
Proof: We prove for solution cube; proof for conflict cube is similar. Since m1 is under SS1,
m1 and SS1 are consistent. Since SS1ExtSS2, A2 ⇒ SS1. So A2 and SS1 are consistent.
Also, m1 and A2 are consistent is given. Thus m1 ∧ A2 ∧ SS1 does not evaluate to constant
0. Since m1 is a solution cube m1 ∧ SS1 ⇒ out. Therefore, m1 ∧ A2 ∧ SS1 ⇒ out. Since
A2 ⇒ SS1, m1 ∧ A2 ⇒ out.
Theorem 1. T2 = {m2 | ∀ cube m1 under SS1 m2 = m1A2}. In other words T2 = T1A2
Proof: Complete: For completeness, we need to show that T1A2 is a complete sub-tree
defined over the variables V 2 = {(I ∪ X)\A2}. T1A2 will be free of variables in A2 due to

Maheshwar Chandrasekar Chapter 3. Symbolic Model Checking 42
cofactoring of T1 with respect to A2; thereby it will be defined over the variables in V 2.
Further, T1 is a complete sub-tree defined over the variables V 1 = {(I ∪ X)\A1}. Thus
T1A2 will be a complete sub-tree over variables in V 2.
Sound: We need to show that the construction of T2 does not add a conflict cube as a
solution cube (Case A) and vice-versa (Case B).
Case A: Suppose an originally conflict cube m2 in T2 is added as a solution cube by our
construction. Then T1 has a corresponding solution cube m1 such that m2 = m1A2. Note
that m1 and A2 are consistent; otherwise m2 does not exist. Then by Lemma 1, (m1 ∧ A2)
⇒ out. Since m2 = m1A2and (m1 ∧ A2) ⇒ out, (m2 ∧ A2) ⇒ out. Thus m2 is indeed a
solution cube in T2.
Case B: Suppose an originally solution cube m2 in T2 is added as a conflict cube by our
construction. Then T1 has a corresponding cube m1 such that m2 = m1A2. Note that either
m1 and A2 are inconsistent or m1 is a conflict cube in T1. If m1 and A2 are inconsistent
then m2 = m1A2cannot be a solution cube in T2. So they must be consistent. Therefore,
m1 is a conflict cube in T1 and m1 and A2 are consistent. By Lemma 1, (m1 ∧ A2) ⇒ out.
Further, since m2 = m1A2, (m2 ∧ A2) ⇒ out. Thus m2 is indeed a conflict cube in T2.
Theorem 2. The search space represented by T2 is redundant.
Proof: T1 is already explored. Further, by Theorem 1, T2 can be constructed from T1.
Thus T2 is a redundant search space. ¦
Example: Let us consider Figure 3.3. The sets in curly braces next to each decision

Maheshwar Chandrasekar Chapter 3. Symbolic Model Checking 43
node N represents the search state learned by AT after exploring the space under N . The
logical expression represents the pre-image (computed bottom-up) at N obtained after this
exploration. Assume that we have explored the space under decision c and that the current
search state SS2 is {b, f , g} obtained by the set of decisions {c, d, b} (A2). Further let a
and b be the state variables. Also, let SS1 be the learned search state - {f , g} - under the
decision c. Thus SS1ExtSS2. However, it can be seen that the pre-image (P2) under SS2
is empty (constant 0) whereas that under SS1 is a ∧ b (P1). Here, P2 can be obtained by
computing the cofactor of P1 with respect to A2.
3.3.3 Over-approximated Preimage
Theorem 1 can be used to obtain the set of solutions under the current search state SS2
whenever SS1ExtSS2 where SS1 is a previously learned search state. Thus it helps in
determining SS2 as a redundant search state during pre-image computation, which is not
possible by existing methods. One issue in using this learning for pre-image computation is
that the pre-image obtained at any decision node in the DT will have the input variables
I existentially quantified (Equation 2.2). Thus, by the construction of Theorem 1, certain
additional solution cubes will be added to the set M2. For instance, consider the previous
Example discussed above. Here, we assumed that a and b are state variables. Suppose only
a is a state variable and b is an input variable. Then the pre-image P1 under the search
state SS1, obtained by the decision c, will be a since b is existentially quantified in the
pre-image computation. Later, when SS2 is encountered, we determine that SS1ExtSS2.

Maheshwar Chandrasekar Chapter 3. Symbolic Model Checking 44
In this scenario, we will compute the cofactor of P1 with respect to A2 (P1A2) to obtain
P2 as the pre-image under SS2. Now P2 = a; this is not correct since under SS2 there
is no solution as shown in the Figure 3.3. The reason is that when we learned P1, we lost
the information due to existential quantification that under SS1, we need b = 1 to get a
solution. However, if we had learned P1 as a ∧ b then P1A2 would have given the desired
result. Note that the Theorem 1 is sound and complete in determining that the search state
SS2 is redundant. However, the issue is in computing the pre-image P2 under search state
SS2. This is the reason that we refer to cubes under a search state in general and not the
pre-image cubes under a search state in the Lemma and Theorem discussed above.
One interesting observation is that if we just use the cofactor of pre-image P1 with respect
to A2, we obtain an over-approximation of P2. This is due to the nature of existential
quantification of input variables. Precisely, in each solution cube under SS1, we only lose the
necessary assignments on I variables when computing P1 due to existential quantification.
Thus no solution under SS1 is missed in P1. For instance, in the above example, we lost
the information that b = 1 is necessary under SS1 for the solution cube a ∧ b. Still we did
not miss this solution - P1 contains a. So if we use the cofactor of P1 with respect to A2
as the pre-image under SS2, the soundness (Case A)of Theorem 1 may be compromised.
Therefore, for such cases, the final pre-image computed may be an over-approximation of
the original pre-image.

Maheshwar Chandrasekar Chapter 3. Symbolic Model Checking 45
;
<=
> ?@ >
A?
B CEDF=
GIH
J�B K L B M�NJ#B COL B K L B M�N
J�B =EL B K L B M/NJ PEL B M/N
J P�N
QSRT>VUXWZY�[ \�]^\`_a\cbed f�d UXgihkj�\l\m@T\cn�j/b:o
prqsK CEP�t qvuvqsK�Gxwy{z u z t^J P/DEB |EDEB =#Nr}prqv~s��t CO~�tO�
GIwG��G�HG�� B C
� B =sD�GIHs�I��� =sDFGI���p�qsK CEP�t qOu�qsK�GI�y{z u z tOJ P/D/|/Nx}�� B CF�
G��G��G��G��
� B |ED�GI�s�I��� |EDFGI���� B PsDFG��s����� PsDFG��s�
���:�:�0�3� � <�� �����r� ;O� � ����A��r� ; ��� � � � ���r� < � �0� �5 < �#�k�5¡3��¢ �3���rA£� � �0� ��¤:� ; � ��� ���S¥¦�0���
GIw
�¨§a©ª�{«r¬ 0®�¯ °/®/¯ ±/²�¦�����r��ASA��x� � �³e� < � ;r� � �#<r� � ; �3�k� <r� � ? � ¢ � �
<> @
J ´ NGI�GO�
G��
��µ£©ª�¦¶ ¬ 0®�°/²J ´ NG��
GI�G�� · � � ���5A A
¸5CE�F¹sºE|:»^´ ~/ºO¼s|E}O�½xqO¾ ´ |:»E´ ~sºO¼s|E}Ow½ ½xqO¾ ¿�t ´ qO~p prqO~�K ¾ ´ P�t
�¨«
��À�¨Á
��Â
nà b
Ä
>aR >�UXWÅYc[ \�]F\Å@kUX[ Æ�]Od UXgÇ@T\�]�ÈmÃ�]Fn�d g:\:ÄÉneÊ�]�\�jÃ�jFnXg:b:o{ËOnXg:Ä�ËIÃ:UXÆ�g{ÄZf:\�nXjFbeo
�{«
��À�¨Á�Ì
�¨Â�Ìb
_ÍRkÎ�ÏÐd f¨]F\�g�]Ed nX[�ÑiÆ:nXg{]^d ÊEd b{n�]Od UXgÇUeÊ�d#gcYcƨ]ÐÒ:nXjEd n9Ã�[ \`Ó Ä�Ô
�w
nà ��«
�¨À�¨Á�Ì
��ÂrÌb
nÃ
�¨Â�Ì�Ìbn
Î�RkÕ�d g:nX[{ÖTjF\Xd W×neØl\Zn:Ê�]F\�jl\{Ïld f¨]^\lg¨]Od nX[�Ù�Æ:n�g¨]^d ÊFd b{n{]�d UXgUeÊ�d#gcY�ƨ]lÒ�nXjEd n�Ãc[ \efZÓ Ä�Ô�nXg{ÄÚÓ ÃcÔ
Figure 3.4: Preimage Computation based on Search State Extensibility

Maheshwar Chandrasekar Chapter 3. Symbolic Model Checking 46
3.3.4 Computing the exact pre-image - Implementation Details
We explain our exact pre-image computation procedure using the same example discussed
above. However, for this discussion, we assume that b and d are input variables and a
and c are state variables for the design shown in Figure 3.3. The complete decision tree
DT depicting the branch-and-bound procedure is illustrated in Figure 3.4A. To the left of
each decision node N represents the pre-image function, which is defined in Figure 3.4B.
The pre-image is computed bottom-up after exploring the sub-tree rooted at N . Note that
in order to leverage the proposed learning technique and to compute the exact pre-image,
we do not existentially quantify the input variables in the computed pre-image during the
decision tree search. Thus we can obtain P2 by computing the cofactor of P1 with respect
to A2. This is because P1 is not existentially quantified and thereby no information about
necessary assignments on solution cubes is lost in P1. We store the pre-image computed as
an AND/INVERTER Graph (AIG) [70]. Note that efficient packages to construct memory
efficient AIG structures [62, 63] are available. We leverage these packages to build memory
efficient pre-image functions. Finally, after the branch-and-bound procedure terminates and
returns the set of all solutions, we quantify the input variables. Quantifying the input
variables in this set of all solutions is just linear in complexity.
For instance, Figure 3.4C represents the final set of all solutions returned by the branch-and-
bound procedure. Now, we need to existentially quantify the input variables - b and d - in
order to obtain the original pre-image. Note that we use the ITE operator to compute the
set of all solutions under a decision node N . Let P0 represent the solution cubes explored

Maheshwar Chandrasekar Chapter 3. Symbolic Model Checking 47
under the else decision at N and P1 that under the then decision. Let v represent the variable
decided in the node N . Then the set of all solutions that represent the explored sub-tree
rooted at N is (v ∧ P1)∨
(v ∧ P0). Further, note that the DT represents a free BDD (i.e.)
in any path of the decision tree no variables occur more than once. Since we cofactor P1
with respect to A2 to obtain P2, this characteristic is still intact in the DT . Thus P0 and P1
does not depend on the variable v. So if we need to existentially quantify the variable v then
we need to replace this variable with non-controlling value in each of the gate g such that
v is an input to g. Figure 3.4D represents the scenario where primary input variable d is
existentially quantified from the set of all solutions represented in the Figure 3.4C. Further,
the Figure 3.4E represents the final pre-image after existentially quantifying the remaining
input variable b. Thus after the set of all solutions is obtained, the quantification step is just
linear in the number of input variables.
3.3.5 Related Work
Search State Extensibility based learning efficiently utilizes the extensibility information
among search states to identify non-trivial redundant search states. However, the challenge
is in obtaining preimage under the search state identified as redundant. The above section
addresses this issue. A closely related work is reported in [45]. However the main difference
between their method and ours is that they learn the entire cutsets obtained after each
decision in the decision tree. Our approach uses AT to compute a succinct assignment set
sufficient to represent the search state. Thus our learning framework can aid in identifying

Maheshwar Chandrasekar Chapter 3. Symbolic Model Checking 48
several non-trivial redundant search states than that proposed in [45]. Further, due to non-
chronological backtracking we do not learn search states at each node in the decision tree.
3.3.6 Heuristic for guiding AT
In Section 3.3.1, we pointed out that AT may encounter choices when backtracing through the
circuit to determine a reason. These choices occur due to two/more inputs (ci’s) controlling
the value at a gate cg independently. Albeit enumerating all possible reasons (for a given
search state) may be of interest, it may incur significant time overhead. This raises the
question of which ci to choose during the backward traversal through cg.
Controllability metrics of a signal have long been used for circuit related problems. However,
we are interested in the frequency of occurrence of the value at a ci, which implies the
controlling value at cg. Choosing a ci with high frequency of occurrence of the value (which
implies controlling value at cg) may heuristically allow the AT to determine a more frequently
occurring reason. As more frequent occurrence of a learned search state leads to more search
space pruning, this heuristic is a better choice.
S C
b
outa
c
d
e
NCB
a
b
cObj: out=1
(B) Partial Decision Tree(A) Circuit
{b, c}
0
0
01
Figure 3.5: Probabilistic heuristic to guide AT

Maheshwar Chandrasekar Chapter 3. Symbolic Model Checking 49
Consider the circuit in Figure 3.5. The decision tree shows the search state SS after the
decision {c}. Suppose the next decision is {a}, then the objective (out = 1) is satisfied. Now,
AT has two choices (d = 1 and e = 1) as it backtraces through the gate out to determine
the reason for out = 1. It can be seen that the frequency of occurrence of d = 1 is higher
than that of e = 1. Further, if AT backtraces through gate d then a = 1 is obtained as
the reason and for the backtrace through gate e, {a = 1, c = 0} is obtained as the reason.
Obviously the frequency of occurrence of a = 1 is higher than that of {a = 1, c = 0}. Thus
the heuristic helps in determining a reason with a high occurring frequency.
Choosing a ci with a greater frequency of occurrence may imply that a smaller reason is
obtained by the AT. This is because a smaller number of nodes may be involved in implying
the ci. For instance, to imply an AND gate to 0 it is sufficient that one of its input is
0. However, to imply the AND gate to 1, it is necessary that all of its inputs are 1. This
is reflected by the frequency of occurrence of 0 and 1 values at the AND gate’s output.
Obtaining a = 1 as the reason in the above example explains this case. Thus the heuristic
may direct AT to obtain the smallest possible reason.
Further, the above heuristic may boost the performance of the learning method by obtaining
a sufficient reason quickly. This again follows from the notion that a greater frequency of
occurrence of a value at ci leads to a smaller number of nodes in the fanin cone of ci to imply
it. Thus a smaller number of nodes needs to be processed in the fanin cone of ci during
the backward traversal. This justifies that the heuristic is beneficial even if the reason for a
given state is unique.

Maheshwar Chandrasekar Chapter 3. Symbolic Model Checking 50
Determining the exact frequency of a value occurrence at each gate in the monitor (Figure
2.2) could be tedious. So we use probability-based measures. Since, we represent the monitor
using 2-input AND and NOT gates (And-Inverter graph [70]), we illustrate the formula to
compute the probability of a value V occurrence at a 2-input AND gate G below:
P (Gc) =∑
i P (Gci) −∏
i P (Gci) and P (Gnc) =∏
i P (Gnci), where
• P (Gc)/P (Gnc) is the probability of G getting assigned its controlling/non-controlling
value
• P (Gci)/P (Gnci) is the probability of ith input of G getting assigned the controlling/non-
controlling value
Note that these formulae assume that the inputs to G are independent. For a primary input
pi, we use a value of 0.5 for both P (pi0) and P (pi1). Similar formulae can be obtained for
any type of gate. These frequency occurrence values are static in the sense that they can be
pre-computed quickly for any given design.
3.4 Experimental Evaluation
3.4.1 Setup
We implemented the proposed learning for computing the exact pre-image in the open source
verification platform ABC [62]. Similar to [38, 68], we modified the PODEM engine [15] to

Maheshwar Chandrasekar Chapter 3. Symbolic Model Checking 51
perform the required branch-and-bound search for pre-image computation. The pre-image
was computed iteratively until the fix-point.We used VIS invariant properties [63] and some
of the hard-to-reach states of ISCAS/ITC [77, 78] benchmark circuits for our experimental
runs apart from the TIP benchmark suite [79]. We conducted our experiments on a 3.0GHz
Intel Xeon machine running with 2GB RAM on a Linux operating system.
The current state-of-the-art techniques for pre-image computation can be classified into
SAT/ATPG based [42,38] techniques and Circuit Cofactor based (hybrid SAT) [44,45] tech-
niques. These methods were also implemented in the ABC platform for comparison with
our method.
Experiment 1: In this setup, we compare our method with the SAT/ATPG based methods.
The resource limitations for each method during an iteration of the pre-image computation
is described below:
• all-solutions ATPG with success driven learning [38] (Technique 0): Preimage circuit
size is limited to 125K gates and the hash table size (for storing learned cutsets) to 1
million.
• all-solutions SAT solver (using MINISAT SAT solver) [42] (Technique 1): Circuit
justification [43] for solution cube enlargement and ZBDD-to-clause conversion tech-
nique [47] for state set management were utilized. The number of learned clauses was
limited to 1 million and the number of ZBDD nodes to 200K.
• Our method (Technique 2): Preimage circuit size was limited to 125K gates and the

Maheshwar Chandrasekar Chapter 3. Symbolic Model Checking 52
number of learned search states to 1 million.
Experiment 2: Note that the cofactor expansion method [45] learns cutsets to identify re-
dundant search spaces. Thus our learning method elegantly fits into their cofactor expansion
framework. Instead of cutsets, we use AT to determine a succinct assignment set sufficient
to represent each search state. Then we identify and prune redundant search spaces based on
the extensibility relationship. In this setup, we compare cofactor expansion method with our
learning, cofactor expansion method without our learning, and a hybrid SAT based circuit
cofactor method [44]. The resource limitations for each method during an iteration of the
pre-image computation is described below:
• Circuit cofactor [44] (Technique 3): The number of learned clauses is limited to 1
million and the pre-image circuit size to 125K gates.
• Cofactor expansion without our learning (Technique 4): The number of learned clauses
is limited to 1 million and the pre-image circuit size to 125K gates.
• Cofactor expansion with our learning (Technique 5): The memory limitations were the
same as that of Technique 4.
The time limit for these fix-point computations were set to 4 hours. The results for Exper-
iment 1 is summarized in Table 3.1 and for Experiment 2 in Table 3.2. For each method,
we report the number of steps (depth) iterated during fix-point computation, the total num-
ber of cube enumerations (#Enum) and the time taken in seconds for these iterations. An
asterisk implies that the method could not iterate until fix-point due to resource limitations.

Maheshwar Chandrasekar Chapter 3. Symbolic Model Checking 53
Table 3.1: Comparison with SAT/ATPG-based approaches
All Solutions SAT [43] All Solutions ATPG [38] Our ApproachCkt D #E T/S D #E T/S D #E T/S
vis.coherence.3.E 6* 866K TO 12* 4.4M 12.5K(MO) 14 800K 1K
eijk.S344.S 3* 587K 13.5K(MO) 5* 2.4M 7K(MO) 5 1.4M 4.6K
b11.inv 14* 1.2M TO 17 235K 213.6 17 54K 29.8
texas.ifetch1.5.E 13* 885K TO 28 246K 90.2 28 81K 43.2
vis.coherence.2.E 6* 894K TO 10 519K 200.2 10 364K 175.7
b09 3* 1M TO 12 1.4M 5.7K 12 783K 3.7K
vis.arbiter.E 11 218K 973.5 11 881K 2.1K 11 296K 641.1
texas.ifetch1.8.E 8* 1.2M TO 12 110K 19.4 12 91K 16.5
b11.1 8* 1.1M TO 16* 1.4M 10K(MO) 22* 1.2M TOb05 5* 1M TO 29* 4.1M TO 33* 2.2M TO
eijk.bs3271.S 2* 1.3M TO 2* 113.7K 5.7(MO) 3* 539K 3.4K(MO)∗: Incomplete D: Depth #E: Number of cube enumerations TO: Time Out MO: Memory Out
Table 3.2: Comparison with Cofactor-based approaches
Technique 3 [44] Technique 4 [45] Technique 5Ckt D #E T/S D #E T/S D #E T/S
s3271.1 3* 1M 3.9K(MO) 4* 1.4M TO 5 1.1M 3.3K
s5378.1 5* 2M 3.8K(MO) 5* 36.7K TO 7* 41.5K TOs1269 8 282.5K 323.2 8 10.3K 431 8 9.6K 75.4
texas.parsesys3.E 17 1.1K 4.57 17 722 6.5 17 941 3.7
s3271.2 3* 1M 1.1K 2* 1M 6K(MO) 5* 2.2M TOeijk.bs3271.S 7* 1M 14.1K(MO) 11* 952K TO 12* 734K TO
s38417 1* 539.8K TO 2* 49.5K 7.2K(MO) 3* 151.8K 5.7K(MO)eijk.bs3384.S 1* 1M 1K(MO) 2* 1M 2.9K(MO) 7* 967.6K 8.4K(MO)
∗: Incomplete D: Depth #E: Number of cube enumerations TO: Time Out MO: Memory Out

Maheshwar Chandrasekar Chapter 3. Symbolic Model Checking 54
3.4.2 Results
Experiment 1: The all-solutions SAT method timed out for almost all runs. However,
the all-solutions ATPG and our method performs better than the all-solutions SAT method.
The reason is that SAT methods need to explore each unique solution (a state variable
assignment) and block them one by one. Thus the blocking clauses are defined on the state
variables. However, as discussed in Section 3.3.1, different assignments on the input and state
variables may lead the search process to the same search state in the DT . Thus distinct
solution assignments may lead to the same search state and the all solutions SAT method may
waste time exploring the redundant search spaces under such solution assignments. However,
the search state representation employed by the other two methods allows one to determine
such redundant search states and can backtrack from this state immediately. The results for
instances like texas.ifetch1.5.E, texas.ifetch1.8.E and vis.coherence.2.E support this claim.
This is analogous to the observation made in [39,73]; empirical evidence is provided in [39,73]
to show that the performance of a SAT solver is enhanced if the learned reason for a conflict
is a cut in the implication graph (IG) that is closer to the conflict (in the IG) rather than
being defined on the decision variables.
The succinct representation proposed by our method to represent explored search space al-
lows us to determine non-trivial redundant search states. Thus our method can prune the
search space represented by such search states. This is reflected by the number of enu-
merations required for the fix-point computation. For instance, for b11.inv our method
performs almost 180K fewer enumerations than the all-solutions ATPG method. Fur-

Maheshwar Chandrasekar Chapter 3. Symbolic Model Checking 55
ther, for b09, our method performs 617K fewer enumerations than the all-solutions ATPG
method. For both these runs, the all solutions SAT method times out due to the enor-
mous amount of solution enumerations required to compute the pre-image. Further, for
eijk.S344.S and vis.coherence.3.E only our method could compute the fix-point. For b11.1,
b05 and eijk.bs3271.S our method could reach deeper than the other two methods. Note
that each iteration involves implicitly enumerating an exponential number of assignments in
the size of the input and state variables. This indicates that our method achieves significant
improvement in both time and memory compared to the other two methods.
Experiment 2: The circuit cofactor method [44], similar to all-solutions SAT, defines the
explored solution space using the state variables. However, they propose an efficient solution
cube enlargement technique that allows to capture several non-trivial solution assignments
on the state variables for each solution obtained in the DT . This is analogous to the objective
of our method. We try to represent the explored search state using a succinct representation
so that distinct assignments on the state and input variables that lead to this explored
search state, in the future search process, can be identified as redundant. Whereas, the
circuit cofactor method attempts to learn the entire distinct solution assignments that may
lead to this explored search state. The learning techniques and search process has a complex
interplay and the effectiveness of these techniques can only be determined by empirical data
for the search process.
The reduction in the number of enumerations for s1269, eijk.bs3384.S and eijk.bs3271.S indi-
cates that our succinct state representation indeed helps in identifying non-trivial redundant

Maheshwar Chandrasekar Chapter 3. Symbolic Model Checking 56
search states. Further, for s3271.1, only our method could reach the fix-point. Overall, our
method performs significantly better than the other two methods.
3.5 Chapter Summary
We propose a succinct search state representation for pre-image computation. We incorpo-
rate this representation in our learning mechanism to determine non-trivial redundant search
states using extensibility relationship among search states. Thus, we can quickly prune re-
dundant search spaces, essential for an efficient branch-and-bound procedure. Further, we
showed that our method can be used to compute an over-approximate pre-image. Also,
we proposed a probability based heuristic to guide our learning technique. Experiments
showed significant improvements over the existing state-of-the-art techniques for pre-image
computation.

Chapter 4
Tight Image Extraction for Model
Checking
In the literature, over-approximate state space traversal has been shown to be quite promis-
ing in verifying properties on industrial-sized hardware designs. Essentially, they compute an
over-approximation of reachable design state space and try to show that the desired property
is valid in this over-approximated space (Figure 4.1). However, a counter-example in this
over-approximated space may not translate to one in the original design; thus efficient mecha-
nisms to identify and eliminate (refinement) such false-negatives from the over-approximation
are essential to make such model checking approaches complete. In this chapter, we pro-
pose an interesting over-approximate image computation technique. Further, we utilize this
technique to design an unified abstraction refinement framework for model checking.
57

Maheshwar Chandrasekar Chapter 4. Tight Image Extraction for Model Checking 58
Û�ÜFÝ�Ü�ÞXÛ5ß�Ý�à�Þ9á:ârã ä�Þ5å/æsÞ
çxÞ5ÝxàOè�Ý5érê ÞlÛIÜ�Ý�ÜFÞlÛ�ß5ÝxàOÞë�äxÞrå#ì/Ý5ß3ßrå�íxî5ã ïÍÝIÜsã íâ�í�ðç5ÞxÝ�àIè5Ý5é3ê ÞXÛ�Ü�ÝIÜ�ÞXÛrßxÝ�àOÞ
Figure 4.1: Venn Diagram showing over-approximation of Reachable State Space
4.1 Introduction
Abstraction of design under verification is essential to combat state explosion problem in
Model Checking of industrial sized designs. Initially, generation of an initial abstract model
and subsequent refinements of the abstract model were done manually. The success of such
approaches largely depended on the creativeness and intelligence of the subject performing
it. Clarke et al. [81,82] were the first to propose a completely automatic technique to perform
abstraction and refinement. They used atomic formulae to create an initial abstract model of
the design and used information from the spurious counter-example (if any) for refinement.
Thus, they christened their framework as Counter-Example Guided Abstraction Refinement
Framework (CEGAR). Later, several variants of this automatic approach were proposed like
CEGAR for Probabilistic Systems [83], CEGAR with proof templates [84] and using CEGAR
to guide bounded model checking to find complex bugs [85].
In [86], Craig showed that given an inconsistent formula φ = A∧B, an interpolant P can be

Maheshwar Chandrasekar Chapter 4. Tight Image Extraction for Model Checking 59
derived such that A ⇒ P and P ∧B is inconsistent. Further, P can be defined over the vari-
ables common to A and B. In [87], McMillan proposed an interesting abstraction technique
based on Craig interpolants [86]. Essentially, the idea of interpolant generation was utilized
by McMillan to obtain an over-approximate image space during Bounded Model Checking
(BMC). We refer readers to Section 4.2 for a complete discussion of this technique. This
approach, unlike previous SAT-based methods like [89], is bounded by the longest shortest
path between any two states. Note that this can be significantly longer than the diameter
of the DUV’s reachable state space but this approach was shown to be effective on several
large verification instances. Although Craig interpolant-based method has been shown to be
promising, they suffer from two major drawbacks - the computed interpolants representing
over-approximate state space may be highly redundant and the over-approximations may
not be tighter. Recently in [90, 91], the authors proposed to integrate over-approximations
obtained from other than unsatisfiable proofs like those based on relationships between state
variables within the Craig interpolant-based model checking framework. However, even more
tighter abstractions are necessary for verifying industrial sized designs. In our approach, we
attempt to extract image cubes obtained by simulating each path in the decision tree formed
by the branch-and-bound search during BMC. Note that the branch-and-bound search may
excite multiple unsatisfiable cores that may exist in the problem. Thus our over-approximate
image are in a sense related to the multiple unsatisfiable cores inherent to the problem unlike
the interpolant based method, which are usually based on a single unsatisfiable core. Al-
though, interpolant from multiple unsatisfiable cores can be generated and conjoined, such

Maheshwar Chandrasekar Chapter 4. Tight Image Extraction for Model Checking 60
approaches are in general tedious. Further, over-approximation in our technique is based on
the notion of extensibility among search states in the decision tree. Thus over-approximate
space computed by our technique may be tighter than those obtained by existing interpolant
methods.
Our main contribution, in this chapter, is an efficient method to extract over-approximate
image during BMC runs [80]. We show that our search state extensibility based learning
framework elegantly fits into our over-approximate image computation approach and pro-
vides for aggressive search space pruning. Further, we show that the over-approximate image
space computed by our technique is indeed an interpolant. Experimental results on hard-to
prove reachable/unreachable states and sequential equivalence benchmarks of ITC99 circuits
indicate the promise of our approach.
Outline: The next section introduces the interpolant based model checking approach pro-
posed in [87]. The subsequent section introduces our technique for over-approximate image
computation and shows that the implicitly computed image space is indeed an interpolant.
The next section discusses the application of our extensibility based learning framework in
the image-computation set up. Further, it presents an abstraction refinement framework for
model checking based on our image extraction technique. Experimental results and summary
are provided in the last two sections of this chapter.

Maheshwar Chandrasekar Chapter 4. Tight Image Extraction for Model Checking 61
ñ:òOóô òñ�òIõ ñ:ò�ö0÷ õ
øù
Figure 4.2: Model for Interpolation-based Model Checking
4.2 Preliminaries
McMillan, in [87, 88], showed that Bounded Model Checking and interpolation can be com-
bined to provide an over-approximate image operator, which can significantly aid in avoiding
the costly quantification step for image computation. Consider the BMCk(I, Tk, F ) prob-
lem shown in Figure 4.2 - it consists of three constraints, viz., the initial constraint (I), the
Iterative Logic Array constraint (k time-frames - TF0 to TFk−1) and the final constraint (F
- property negation). The initial and the final constraints are asserted to the left of the first
frame and to the right of the last frame respectively. Now, McMillan, partitions this prob-
lem instance into two distinct sets A and B. A is set to the initial constraint and the first
time-frame (TF0), while B is set to the remaining k−1 time-frames (TF1 to TFk−1) and the
property negation constraint. Suppose, this BMCk problem instance is unsatisfiable, then
a Craig’s Interpolant P can be derived such that
• I ∧ TF0 ⇒ P

Maheshwar Chandrasekar Chapter 4. Tight Image Extraction for Model Checking 62
• P ∧∑k−1
i=1 TFi ∧ F is inconsistent
• P is defined in terms of the state variables that are shared between time-frames TF0
and TF1
Since P is implied by the initial state I and the first time-frame TF0, it is an over-approximate
image of I. Further, from the second condition listed above, no state in P can reach a state
in F in k − 1 steps. This over-approximate image operation can be leveraged to design an
unbounded model checking algorithm as shown in Algorithm 1. It was shown in [87,88] that
this algorithm is sound and complete.
The main potential of interpolation based model checking approach lies in the elimination of
costly quantification step in image computation. Further, it does not increase the problem
size during each iteration of BMC, which may significantly affect the solving time. However,
such approaches require some form of recording by solvers when solving A ∧ B. This is
essential to derive an interpolant. Further, interpolants based on distinct unsatisfiable cores
in the problem may represent a tighter approximation. However, computing such tighter
interpolants may increase the burden on the solver and are in general tedious to compute [94].
Thus, in practice, a single unsatisfiable core is utilized for extracting the interpolant to reduce
computational costs.

Maheshwar Chandrasekar Chapter 4. Tight Image Extraction for Model Checking 63
Algorithm 1 Interpolant based Model Checking for BMCk(I, Tk, F )
1: if I ∧ F is satisfiable then2: Counter-example of length zero exists, Return3: end if4: Let R = I5: Let nFrames = 06: while true do7: Construct BMCk(R, Tk, F )8: Let A = R ∧ TF0
9: Let B =∑k−1
i=1 TFi ∧ F10: if A ∧ B is satisfiable then11: if nFrames==0 then12: Counter-example of length k exists, Return13: else14: Let k = k + nFrames15: Let R = I and nFrames = 016: end if17: else18: Compute the interpolant P of A ∧ B19: if P ⇒ R then20: Property holds, Return21: end if22: Let R = R ∨ P23: Increment nFrames24: end if25: end while

Maheshwar Chandrasekar Chapter 4. Tight Image Extraction for Model Checking 64
úû ü
ú¦û ý ú¨û ý
ú¨û þ úû þ ú�û þ ú¦û þ
ÿ ÿ ÿ ÿÿ ÿ ÿ ÿ
ÿúû �
ÿ�������� �� �������
������ ��� ������������������� �������� ��� ��!"�#� ����$ �lú¦û �
Figure 4.3: Decision Tree for BMCk(I, Tk, F )
4.3 Our Model Checking Approach based on Image
Extraction
4.3.1 Motivation
Our key idea lies in the observation that when solving a BMCk problem, over-approximate
image is implicitly computed during the branch-and-bound search. Suppose an ATPG engine
is used to perform the branch-and-bound search for the BMCk problem in Figure 4.2. The
decision tree formed by this search can be illustrated by the binary tree in Figure 4.3. Now,
consider the union of cube assignments to the state variables, sharing time-frames TF0 and
TF1, at each terminal in the decision tree. This will represent an interpolant P , as will be
shown later. Note that this approach does not require any recording by solvers to compute

Maheshwar Chandrasekar Chapter 4. Tight Image Extraction for Model Checking 65
an interpolant other than the dynamic interpolant computation (just scanning the image
cubes). Further, the decision tree may excite distinct unsatisfiable cores that are inherent
to the problem. Thus, in a sense, the over-approximate image computed by our image
extraction technique may relate to the multiple unsatisfiable cores, which is necessary to
generate a tighter approximation.
Algorithm 2 BMCIE(BMCk(R, T, F ))
1: OAI = Constant 02: Return BMCIERec(BMCk(R, Tk, F )
Algorithm 3 BMCIERec(BMCk(R, T, F ))
1: if R assertion is violated then2: Return false3: end if4: if Counter example found then5: Return true6: end if7: if F assertion is violated then8: OAI = OAI ∨ scanImageCube()9: Return false
10: end if11: pi = backtrace()12: logicSimulate(pi=v)13: if BMCIERec(BMCk(R, Tk, F )) then14: Return true15: end if16: flipVal(pi)17: logicSimulate(pi=v)18: if BMCIERec(BMCk(R, Tk, F )) then19: Return true20: end if21: logicSimulate(pi=X)22: Return false;

Maheshwar Chandrasekar Chapter 4. Tight Image Extraction for Model Checking 66
4.3.2 Image Extraction
Given a BMCk(R, Tk, F ) instance, our basic bounded model checking algorithm with image
extraction is illustrated in Algorithm 2. We use an ATPG engine to perform the counter-
example search. This engine decides only on the controllable signals (primary inputs) in
the BMCk(R, Tk, F ) instance. This algorithm will return true if the given BMC instance is
satisfiable; otherwise, it will return false. The scanImageCube function in line 8 of Algorithm
3, returns the conjunction of assignments to state variables that are shared between time-
frames TF0 and TF1. Whenever a conflict with F assertion arises, the conjunction returned
by scanImageCube function is dis-joined with the previously computed over-approximate
image OAI. Finally, when the given BMC instance is proved to be unsatisfiable, OAI will
represent an interpolant implied by A ≡ (R ∧ TF0) and will be inconsistent with B ≡
(∑k−1
i=1 TFi ∧ F ).
Theorem 3. If BMCIE(BMCk(R, Tk, F )) returns false, then OAI computed by it is an
interpolant of BMCk(R, Tk, F )
Proof: First, we show that OAI is an one-step over-approximate image of R. Suppose
OAI does not include an image minterm (say m) of R. Then a specific assignment PIASS to
(pseudo) primary input variables of time-frame TF0 must imply this minterm m on the state
variables shared between time-frames TF0 and TF1. Since the algorithm BMCIE(BMCk(R, Tk, F ))
explores all possible input combinations for BMCk(R, Tk, F ), it should have explored assign-
ment PIASS as well. Further, whenever a violation of F assertion occurs, the algorithm scans

Maheshwar Chandrasekar Chapter 4. Tight Image Extraction for Model Checking 67
the cube assignments on variables common to A and B and dis-joins it with OAI. Note that
PIASS will not be inconsistent with R assertion; thus the image cube implied by PIASS will
be included in OAI. Note that this cube will contain the minterm m. Thus, no minterm of
image of R is excluded in OAI. Hence, OAI is an over-approximate image of R.
Next, we show that we cannot reach F in k−1 time-frames from any state in OAI. Suppose,
there exists a state cube assignment s in OAI that can reach F in k − 1 steps. Let PIASS0
represent a primary input assignment, explored by BMCIE(BMCk(R, Tk, F )), due to which
s is included in OAI. Further, let PIASS1represent a primary input assignment to the k− 1
time-frames that leads to F from s. Now, we can construct a primary input assignment from
PIASS0and PIASS1
that can lead R to F in k time-frames. This is in contradiction to the
theorem statement. Thus, no state cube assignment s in OAI can lead to F in k − 1 steps.
Finally, note that OAI is defined in terms of the variables common to A and B. Thus OAI
is an interpolant of BMCk(R, Tk, F ).¦
4.4 CEGAR Framework with our Learning
Algorithm 2 requires powerful learning mechanisms to perform an implicit exploration of
all possible input combinations. Otherwise, it may be very expensive in terms of run time
since it explicitly explores all possible combinations. We illustrate our updated image ex-
traction algorithm with our search state extensibility based learning framework in Algorithm
4. Similar to Section 3.3.2, we use Antecedent Tracing (AT) to compute and learn a succinct

Maheshwar Chandrasekar Chapter 4. Tight Image Extraction for Model Checking 68
%�& '
%(& )
%�& *
+ +
+
%(& ,
+.-./103254�6�798;:.<(-
=>-9?�2A@B2 :C438D:.<�-/E-.F(/�-�@G-.49HI2549JKHIL�-M2N4(F.O9HP%.& ,
%�/QO(4�-�<R�O(SUT�@ F�69?"-
=PVGW.X
=;VGW�Y
=#V1W�Z=;VGW�[ \ H <(-�?�2 @2 :C4]75-U^9-�7�[
_(` a b cd�e ` a
` f `Ngh c i f
j i ck�l e i ckIm e `n f o pofq l `r
Figure 4.4: Missed Image cubes due to Non-chronological Backtracking
search state to represent an explored sub-tree in the decision tree. Further, the learned
search states always represent a conflict space; otherwise a counter example exists and the
algorithm would have terminated earlier.
Other than learning, the main difference between Algorithms 3 and 4 is in the image ex-
traction part. Due to the powerful non-chronological backtracking feature in our learning
framework, we cannot compute over-approximate image as illustrated in Algorithm 3. For
instance, consider the non-chronological backtracking shown in Figure 4.4. After, exploring
the sub-tree with decision node PI3 as the root, it non-chronologically backtracks to deci-
sion level 1 from level 3. In other words, the space under the flipped value of decision node
PI2 is ignored1. However, if PI2 is a primary input variable in time-frame TF0, then we
may be missing few image cubes that may only be obtained in the ignored sub-space. To
1This space is ignored because there will be no solution in this space for BMCk(R, Tk, F )

Maheshwar Chandrasekar Chapter 4. Tight Image Extraction for Model Checking 69
Algorithm 4 BMCIERec(BMCk(R, T, F ))1: if R assertion is violated then
2: imaFn = Constant 03: Return false4: end if
5: if Counter example found then
6: imaFn = Constant 07: Return true8: end if
9: if F assertion is violated then
10: imaFn = Constant 111: Return false12: end if
13: Increment decision level14: pi = backtrace()15: retVal=false; imaFn0 = NULL;16: imaFn = Simulate(pi=v)17: if imaFn==NULL && retVal=BMCIERec(BMCk(R, Tk, F )) then
18: Return true19: end if
20: if Backtrack level < decision level then
21: Simulate(pi=X)22: Decrement decision level23: Return retVal24: end if
25: reason0 = conflictAnalysis() {Marks the variables common to A and B that are traversed duringAT}
26: imaFn0 = imaFn ∧ scanImageCube() {scanImageCube returns conjunction of marked vari-ables}
27: flipVal(pi)28: retVal=false; imaFn1 = NULL;29: imaFn = Simulate(pi=v)30: if imaFn==NULL && retVal=BMCIERec(BMCk(R, Tk, F )) then
31: Return true32: end if
33: if Backtrack level < decision level then
34: Simulate(pi=X)35: Decrement decision level36: Return retVal37: end if
38: reason1 = conflictAnalysis() {Marks the variables common to A and B that are traversed duringAT}
39: imaFn1 = imaFn ∧ scanImageCube() {scanImageCube returns conjunction of marked vari-ables}
40: imaFn = (pi is an input in TF0)?(imaFn0 ∨ imaFn1):(imaFn0 ∧ imaFn1)41: learn(binaryResolution(reason0, reason1), imaFn)42: Simulate(pi=X)43: Decrement decision level44: Return false;

Maheshwar Chandrasekar Chapter 4. Tight Image Extraction for Model Checking 70
over-come this issue, we propose to compute the over-approximate image bottom-up. We
mark the state variables, common to time-frames TF0 and TF1, that are visited during the
antecedent tracing performed by conflict analysis. The over-approximate image imaFn for
the space represented by a node N is computed as follows. Let imaSubFn0 represent the
over-approximate image for the space represented under N = 0 decision. Let SV0 repre-
sent the conjunction of state variable assignments marked during the antecedent tracing2.
We compute imaFn0 as SV0 ∧ imaSubFn0. Similarly, for N = 1 decision, we compute
imaFn1 as SV1 ∧ imaSubFn1. Finally, if the input represented by N belongs to the left-
most time-frame TF0, then imaFn = imaFn0 ∨ imaFn1. Otherwise, imaFn = imaFn0 ∧
imaFn1.
When learning the search state S that represents the space rooted at N , we learn its corre-
sponding over-approximate image imaFn, which is computed bottom-up (line 41 in Algo-
rithm 4). In future, whenever this learned search state S becomes extensible to the current
search state, we use imaFn as the over-approximate image under the current search space
(lines 16 and 29 in Algorithm 4). Note that, by the nature of our learning, the state cubes
in imaFn with the assignments in S always leads to F in the (k − 1)th time-frame.
Theorem 4. If BMCIE(BMCk(R, Tk, F )) using Algorithm 4 returns false, then OAI com-
puted by it is an interpolant of BMCk(R, Tk, F )
Proof: Argument in the proof for Theorem 3 can be extended to prove this theorem.
2If none of the state variables is marked then the conjunction is a constant 1

Maheshwar Chandrasekar Chapter 4. Tight Image Extraction for Model Checking 71
4.4.1 CEGAR Framework - overall approach
The overall model checking approach based on image extraction technique is illustrated in
Algorithm 5. It mainly differs from Algorithm 1 in the manner in which over-approximate
image is computed. Further, we optimize the BMCk set-up for each iteration of the while
loop by eliminating those states from the R assertion from which it is known (from previous
iterations) that F cannot be reached in k time-frames. We refer to this constrained R as RC
in Algorithm 5.
Algorithm 5 Image Extraction based Model Checking for BMCk(I, Tk, F )
1: if I ∧ F is satisfiable then2: Counter-example of length zero exists, Return3: end if4: Let R = RC = I5: Let nFrames = 06: while true do7: Construct BMCk(RC , Tk, F )8: Let A = RC ∧ TF0
9: Let B =∑k−1
i=1 TFi ∧ F10: if BMCIE(BMCk(RC , Tk, F )) is satisfiable then11: if nFrames==0 then12: Counter-example of length k exists, Return13: else14: Let k = k + nFrames15: Let R = RC = I and nFrames = 016: end if17: else18: if OAI ⇒ R then19: Property holds, Return20: end if21: Let RC = OAI ∧ R22: Let R = R ∨ OAI23: Increment nFrames24: end if25: end while

Maheshwar Chandrasekar Chapter 4. Tight Image Extraction for Model Checking 72
4.5 Experimental Analysis
We implemented our image extraction based model checking approach presented in Algo-
rithm 5 in the open source verification platform ABC from University of California, Berke-
ley [62]. We used hard sequential equivalence benchmarks and hard to prove reachable or
unreachable states for ITC99 [78] benchmark suite. We compared our technique against the
state-of-the-art interpolation based model checking approach [87, 88] (available in ABC). A
maximum of 100 time-frames for unrolling, 1 million conflicts for each BMC run and a total
run time of 24 hours were set as the resource limitations for both the approaches. Our re-
sults are summarized in Table 4.5. We conducted our experiments on a 3.0 GHz Intel Xeon
machine with 2GB RAM running on Linux OS.
In Table 4.5, the first column lists the model checking instance used. A ”S” superscript
indicates that the instance is a sequential equivalence benchmark, whereas a ”J” superscript
indicates that the instance represents a hard to prove reachable/unreachable state. The
next four columns show the number of counter-example checks performed (refer line 9 in
Algorithm 1 ), the depth unrolled (k + nFrames in Algorithm 1 ), status indicating whether
the property holds (Y), violated (N) or undecided (U) and the time taken (in seconds) for
the interpolation method. The following four columns report the same values for our image
extraction based model checking approach. The last column indicates the speed-up achieved
by our technique over interpolation.
The Speedup column (SU) in Table 4.5 indicates that our image extraction technique is

Maheshwar Chandrasekar Chapter 4. Tight Image Extraction for Model Checking 73
on an average 3× faster than the interpolation method, when both of them verified the
corresponding property. One reason may be due to the fact that our technique does not
require any recording during BMCk solving except for the dynamic over-approximate image
(OAI) computation. Another reason may be due to the fact that our approximations are
tighter since the branch-and-bound search may excite multiple unsatisfiable cores. Tighter
approximations may limit the number of times k is increased in Algorithm 1 or 5 since
they may avoid spurious counter-examples, which may otherwise be identified due to loose
approximations. This in turn will reduce the BMC problem size solved in each iteration of the
model checking approach, resulting in reduced solving time. Further, for invalid properties in
Table 4.5, the reduced number of counter-example validity checks performed by our method,
in comparison to the interpolation method, indicates that our approximations are indeed
tight. For example, in instance P5J , only 6 spurious counter examples needed to be checked
in our approach, compared with 15 spurious counterexamples in the interpolation-based
method, resulting in a 4× speedup.
For valid properties, loose approximations may converge sooner than tighter ones if the state
space where property negation holds is significantly small. We conjecture that instance P4S
in Table 4.5 is one such case; however such model checking instances may be easy to prove for
contemporary techniques since the property holds in a major portion of the state space. On
the other hand, results for instances from P0S to P3S and P11J indicate that our technique
can quickly verify valid properties where interpolation faced tremendous difficulty. In these
instances, two or three orders of magnitude speedups were achieved. Finally, our method

Maheshwar Chandrasekar Chapter 4. Tight Image Extraction for Model Checking 74
Table 4.1: Our Image Extraction vs. Interpolation
Hard Interpolation [87] Our methodProp SC D S T SC D S T SU
P0S 51 100 U 8 4 9 Y 0.2 > 40
P1S 7 37 U 86400 7 56 Y 810 > 107
P2S 9 54 U 86400 8 99 Y 68 > 1271
P3S 7 17 Y 13 6 16 Y 10 1.3
P4S 4 9 Y < 1 17 18 U 84 < 0.01
P5S 9 40 N 22 5 40 N 39 0.56
P0J 6 57 N 17 5 57 N 7 2.43
P1J 9 99 N 171 7 99 N 33 5.18
P2J 11 55 N 30 8 55 N 15 2.00
P3J 12 66 N 39 8 66 N 16 2.44
P4J 12 55 N 35 8 55 N 14 2.50
P5J 15 71 N 57 6 71 N 14 4.07
P6J 13 69 N 52 5 69 N 12 4.33
P7J 14 69 N 59 5 69 N 13 4.54
P8J 13 71 N 58 5 71 N 14 4.14
P9J 15 71 N 59 5 71 N 13 4.54
P10J 10 53 N 17 9 53 N 6 2.83
P11J 23 100 U 92 3 41 Y 1.5 > 61.6
SC: # of spurious counter-example
checks D: Depth T: Time in seconds
SU: Speedup S: Y-Proved, N-Counter-example exists, U-Undecided

Maheshwar Chandrasekar Chapter 4. Tight Image Extraction for Model Checking 75
was able to complete 4 instances , for which interpolation was not able to draw conclusions.
4.6 Chapter Summary
In this chapter, we propose a novel and tight image extraction technique for model checking.
Our over-approximate images are in a sense related to the multiple unsatisfiable cores that
may exist in the problem. Thus our approximations may be tighter than those obtained by
existing interpolation methods. Further, we also incorporated our search state extensibil-
ity based learning framework and proved that the generated over-approximate images are
indeed interpolants. Experimental results on sequential equivalence instances and hard-to
prove reachable/unreachable states of ITC99 benchmark circuits indicates the promise of
our approach.

Chapter 5
Fault Collapsing and Test Generation
The two important aspects of test generation are fault modeling and the underlying technique
used to generate test patterns. As mentioned in Chapter 2.2, a good fault model should
accurately model defect behavior and should also be computationally inexpensive in terms
of test generation (and fault simulation). Fault Collapsing is a pre-process to test generation
aimed at realizing the latter criteria mentioned above. In our work, we first propose an
efficient fault collapsing technique based on a novel extensibility relation exhibited by fault-
pairs. Further, traditional techniques encode the multi-valued ATPG problem into Boolean
domain. In addition to fault collapsing, we attempt to encode and solve the test generation
problem in its multi-valued domain itself. Finally, we also propose an efficient learning
mechanism for this multi-valued framework to learn from propagation conflicts.
76

Maheshwar Chandrasekar Chapter 5. Fault Collapsing and Test Generation 77
5.1 Fault Collapsing based on a Novel Extensibility
Relation
5.1.1 Introduction
Fault collapsing (FC) is the process of obtaining a compact fault list (CFL) from an uncol-
lapsed fault list (UFL) by including only a representative fault in CFL for a set of faults
in UFL. FC is a widely researched topic mainly due to its potential benefits on factors
affecting test economics [2, 3]. For instance, during test generation, a compact test set
may be obtained with reduced run-time since the number of target faults in CFL is usu-
ally much less than that in UFL. For the same reason, fault-simulation times for CFL will
be less than that for UFL. Note that the reduction in test generation time will be signif-
icant if (i) FC time is insignificant when compared with the test generation time and (ii)
the collapse ratio (CR = |CFL|/|UFL|) is much smaller and/or the faults not included
in CFL are very hard-to-test faults! Further, since a compact test set can be obtained,
FC may also indirectly aid in reducing test data volume and test application time during
Manufacturing Test. FC techniques depend primarily on two criteria used to perform col-
lapsing: (1) the algorithm (functional/structural) and (2) the relationship among fault-pairs
(equivalence/dominance). Traditional functional techniques utilize either an Automatic Test
Pattern Generator (ATPG) [19,128] or a SAT solver [17,39]; in theory, such techniques can
identify all possible opportunities for FC. However, they are usually not suitable for large

Maheshwar Chandrasekar Chapter 5. Fault Collapsing and Test Generation 78
scale designs or to serve as a low-cost preprocessor since the engines employed are known
to have exponential run-time complexity, in the worst case. On the contrary, structural
techniques utilize the design structure. Although these techniques miss some FC opportu-
nities, they scale well to large scale designs. They are known to identify a large percentage
of collapsible faults. If two faults α and β are found to be equivalent (α ≡ β), then it
is sufficient to include only one of them in the CFL. Further, if fault α dominates fault β
(α w β) in a full-scan design, then fault α need not be included in the CFL, assuming that
β is detectable. Note that α w β and β w α ⇔ α ≡ β; thus dominance-based FC will result
in a more compact fault list than the equivalence-based FC. However, care must be taken if
dominance based FC is used as a preprocessor for test generator. For instance, let fault α
be eliminated from the collapsed list due to α w β. Now, if β is a redundant fault then the
test generator must target fault α since it may be the case that α is testable.
Related Work In the past, several researchers have focused on identifying relationship
between fault-pairs based on equivalence [114, 115, 116, 117, 118, 128], dominance [119, 120,
121, 122, 124] and concurrence [125, 126]. In [114], McCluskey and Clegg proposed three
classes of equivalence - 2 classes of structural and 1 class of functional. Later in [115], Lioy
identified an efficient method based on unique requirements (UR) and D-frontier equivalence
to determine an incomplete set of functional equivalences among fault-pairs. The authors in
[116,118,128] proposed a complete method each to identify equivalent fault-pairs. However,
their techniques require an ATPG engine and may not be feasible for FC. In [130, 131], the
authors showed that for many real-life re-convergent fanout circuits, the set of faults at the

Maheshwar Chandrasekar Chapter 5. Fault Collapsing and Test Generation 79
PIs, fanout origins and branches is sufficient to derive a complete set of tests that will detect
all detectable faults in the circuit. Later, techniques to find relations between the faults
on a fan-out stem, its branches and re-convergent points were proposed in [132, 133, 134].
In [119], Lioy proposed a method to identify dominance relationship among fault pairs based
on UR and D-frontier equivalence. This was later generalized by Vimjam et al. in [124]. In
a different approach [125,126], Doshi and Agrawal implicitly utilized the concept that if two
faults are concurrent - have at least one common test vector t - then they can be collapsed
into a single fault. Note that in such cases t must be included in the final test set. For
practical applications of this approach, we either need an efficient technique to construct a
complete independence graph or to extend this method to incomplete independence graphs.
In addition, the ATPG engine needs to be customized to generate concurrent test patterns.
In [135], Hahn et al. were the first to propose hierarchical FC based on the idea that if
two faults are functionally equivalent in a combinational sub-module S embedded in a top-
level module M, then they are also functionally equivalent in M. Later, Prasad et al. [120]
proposed to first identify functional equivalences for logic cells (building blocks of complex
designs). They pre-compute dominance graphs for logic cells and perform transitive closure
on dominance graph for the complex design (built from the pre-computed graphs) to perform
hierarchical-based FC. In a sequel paper [121], the authors employed functional dominance
for the logic cells and claimed to have observed a collapse ratio of less than 25% for the
first time. In [122], Sandireddy et al. identified that the above two approaches require a
quadratic number of ATPG runs in the size of the target fault list. They reduced the problem

Maheshwar Chandrasekar Chapter 5. Fault Collapsing and Test Generation 80
complexity to a linear number of ATPG runs. Overall, dominance-based FC would provide a
compact fault list that can be directly targeted by an off-the shelf ATPG engine. For practical
purposes, even for an hierarchical approach, we need a low-cost efficient preprocessor that
can enhance the structural FC towards results that are achievable by functional FC.
In our work, we propose a new, low-cost technique to perform dominance analysis based on
the extensibility relationship exhibited by fault-pairs [123]. Further, from a theoretical
point of interest, we also give a lower bound on the size of a minimum collapsed fault list.
Experimental results indicate that, on an average, our technique achieved a 5% reduction
in the CFL size, 96% − 98% reduction in the memory consumed and 2.3× speed-up when
compared with the best known dominance based FC engine!
Outline The next section discusses the preliminaries necessary for the rest of the section.
The following two sections discuss the theory and algorithm of our fault collapsing engine.
Section 5.1.5 discusses the results obtained. Finally, Section 5.1.6 summarizes the section
with future direction.
5.1.2 Preliminaries
Definition 1. A fault α is said to diagnostic dominate [122] fault β if and only if each test
vector t that detects β also detects α at the exact same outputs at which β was detected.
Definition 2. A fault α is said to detection dominate [122] fault β if and only if each
test vector t that detects β also detects α (no restriction on the outputs at which faults are

Maheshwar Chandrasekar Chapter 5. Fault Collapsing and Test Generation 81
detected).
Similar definitions for diagnostic/detection equivalence were proposed in [122]. Diagnostic
dominance/equivalence ⇒ detection dominance/equivalence; the reverse is not necessarily
true.
Definition 3. Unique requirements for a fault α (URα) is the set of necessary gate assign-
ments that must be satisfied by any test vector t to detect α.
An inconsistent URα (no test vector can achieve all assignments in URα) ⇒ fault α is
redundant. Though it is usually hard to compute the complete URα set, there are low-cost
techniques to compute an incomplete URα [136,137].
Definition 4. D-Frontier for a fault α given URα (DFα(URα)) is the set of all gates G that
satisfy either (i) G is an internal gate whose output value is unknown and at least one of the
inputs to G has a value that is different in the good and faulty machines (D or D), or (ii)
G is an output that has a value that is different in the good and faulty machines.
We use the notation DFα(URβ) to indicate the D-frontier for fault α under the UR of
fault β. If DFα(URβ) is empty, then no vector t that detects fault β can detect fault α.
Further, if DFα(URα) is empty then α is redundant. Next, we present theorems proposed
in the literature with the objective of performing as much functional FC as possible at a
low computational cost. Note that, in the following, each theorem encompasses theorem(s)
presented before it (i.e.) it collapses fault list at least to the effect that is achieved by
theorem(s) presented before it.

Maheshwar Chandrasekar Chapter 5. Fault Collapsing and Test Generation 82
Theorem 5. Two faults α and β are said to be equivalent [115] if (i) URα ≡ URβ and (ii)
DFα(URα) ≡ DFβ(URβ).
Theorem 6. Fault α dominates fault β [119] if DFα(URβ) ≡ DFβ(URβ).
Worst case complexity of Theorem 6 is quadratic to that of Theorem 5 since the former
needs to compute the D-frontier of one fault under the UR of another.
Definition 5. D-Frontier Containment [124] - D-frontier DF0 is said to contain D-
frontier DF1 if and only if the following two conditions hold: (i) DF0 ⊇ DF1 and (ii) Either
the fanout cones of gates in (DF0 \DF1) do not overlap with those of gates in DF1 or if they
overlap, any gate G in the overlapping region has the same inversion parity from all paths
originating from the corresponding gates in (DF0 \ DF1) and DF1.
With the above definition, Vimjam et al. generalized the fault dominance relation based on
the following theorem [124].
Theorem 7. Fault α dominates another fault β if DFα(URβ) contains DFβ(URβ).
Unlike Theorem 6 that uses an equivalence check, Theorem 7 uses a containment check.
(DF0 ≡ DF1) ⇒ (DF0 contains DF1); however the reverse is not necessarily true. An in-
teresting observation is that all theorems presented above focus on identifying diagnostic
equivalence/dominance. In this work, we focus on efficiently identifying diagnostic dom-
inance relationship among fault-pairs based on extensibility relationship exhibited by the
pairs. Our technique can capture a special case of detection dominance as well. We show

Maheshwar Chandrasekar Chapter 5. Fault Collapsing and Test Generation 83
that our dominance analysis encompasses and supersedes the above theorems; thus our FC
technique will provide equal or more compact fault list with a comparable computational
complexity.
5.1.3 Extensibility based Dominance Analysis
Proposed Fault Collapsing
Observation 1. Superset condition in Definition 5 is an over-specification when considering
Theorem 7. It is sufficient for each G ∈ DFβ(URβ) to satisfy one of the following
1. G ∈ DFα(URβ) or
2. When fault α is present, G has a fault effect (D or D) under URβ or
3. Any X-path1 from G reconverges with a gate R ∈ DFβ(URβ) and the inversion parity
from G to R is such that it masks the fault effect(s) at the input(s) of R.
We explain the above observation with the following example. Consider the circuit shown
in Figure 5.1. Let fault α be G4’s first input (the fanout branch from gate G1) sa-1 and
fault β be G1’s output sa-1. Now, URβ ≡ {G1}, DFβ(URβ) ≡ {G3, G4} and DFα(URβ)
≡ {G7}. First, G3 ∈ DFβ(URβ) satisfies the third condition in the above observation.
There are 2 paths from G3 to any primary output; the path G3 → G5 → G6 → G8
is blocked at gate G6 due to the controlling value of side input G2. The only X-path is
1P is an X-path (to an output O) if the value of any G′ ∈ P is unknown.

Maheshwar Chandrasekar Chapter 5. Fault Collapsing and Test Generation 84
s ts u
s v
wDt
w>u
w>v
w>x
w>y w>z
s y
s x w>{
w>|
} ~(�C�3��� ����� ������� �
Figure 5.1: Extensibility based dominance analysis
G3 → G4 → G7. However, even if the fault effect of fault β is propagated through gate G3,
it will be blocked at gate G4 ∈ DFβ(URβ). Thus G3 is not a potential D-frontier gate to
propagate the fault effect to a primary output. Next, G4 ∈ DFβ(URβ) satisfies the second
condition in the above observation. Finally, note that the second condition in Definition 5
still holds2. Hence, from the above observation we can conclude that fault α dominates fault
β. However, this conclusion cannot be obtained from Theorem 7 since DFα(URβ) does not
contain DFβ(URβ). The above observation ensures that for any vector t that detects β, the
gate assignments in DFβ(URβ) is always extensible to the assignments (D-frontier) obtained
when fault α is simulated under t (note that t satisfies URβ); we say that DFβ(URβ) is
extensible to DFα(URβ).
Definition 6. DF Extensibility - DFβ(URβ) is said to be extensible to DFα(URβ) if and
only if the following two conditions hold: (i) Observation 1 holds true and (ii) Either the
2We remove any G ∈ DFβ(URβ) that holds the 3rd condition in Observation 1

Maheshwar Chandrasekar Chapter 5. Fault Collapsing and Test Generation 85
fanout cones of gates in (DFα(URβ) \ DFβ(URβ)) do not overlap with those of gates in
DFβ(URβ) or if they overlap, any gate G in the overlapping region has the same inversion
parity from all paths originating from the corresponding gates in (DFα(URβ) \ DFβ(URβ))
and DFβ(URβ).
Theorem 8. Fault α dominates another fault β if DFβ(URβ) is extensible to DFα(URβ).
Proof: Let t be a test for fault β; t satisfies all assignments in URβ. Given the extensibility
relation, we can conclude that t excites fault α3.Let Pβ be an arbitrary path through which
t propagates the fault effect from the site of fault β to a primary output O. We divide Pβ
into two segments - Pβ0: represents the path from the fault site to one of the gates G ∈
DFβ(URβ) and Pβ1: represents the path from G to O. First condition in Definition 6 ensures
that t also propagates the fault effect of fault α to G. Let us call this path as Pα0. Last
condition in Definition 6 ensures that Pβ1 is not blocked under t in the presence of fault α.
Thus Pα0 → Pβ1 represents the path through which t propagates α to output O. ¦
The proof given above implicitly shows that Theorem 8 focuses on diagnostic dominance.
Further, (DF0 contains DF1) ⇒ (DF1 is extensible to DF0); however, the reverse is not nec-
essarily true. Thus, Theorem 8 captures all dominance relationships determined by Theorem
7.
Observation 2. If DFα(URβ) includes an output O then we can immediately conclude that
α w β.
3DFβ(URβ) 6= ∅; otherwise β is redundant. Also, t is a test for β.

Maheshwar Chandrasekar Chapter 5. Fault Collapsing and Test Generation 86
������
�����
������
������
���
�U���
�U�E�
�U���
�U���
������ 1¡D�B¢ £¤�G¥ ¢ ¦
����� ���
���
���
�U� ���
���
§��©¨�ªI«�¬; ® ¯;�G¢ £ �G¥ ¢ ¦
Figure 5.2: Special case of detection dominance
This observation follows from the fact that each test vector t for β will justify URβ and
fault α is propagated to output O under URβ. Thus, in such cases, we can omit the ex-
tensibility check. For instance, consider the c17 circuit from ISCAS85 [76] suite (Figure
5.2A). Let fault α be gate G3’s output sa-0 and fault β be gate G8’s second input (the
fanout branch from gate G7) sa-1. Now URβ ≡ {G7, G2}, DFβ(URβ) ≡ {G10, G13} and
DFα(URβ) ≡ {G6, G10, G13}. Though G6 ∈ (DFα(URβ) \ DFβ(URβ)) reconverges with
G10 ∈ DFβ(URβ) with different inversion parities4, from Observation 2, α w β since the
output G13 ∈ DFα(URβ).
The above observation may realize a special case of detection dominance! In other words,
α w β and fault α may be detected on at least one different primary output than β. To
visualize this, consider Figure 5.2B. Let fault α be gate G2’s output sa-1 and fault β be
4Violates the second condition in Definition 6.

Maheshwar Chandrasekar Chapter 5. Fault Collapsing and Test Generation 87
gate G4’s second input (the fanout branch from gate G2) sa-1. Now URβ ≡ {G2, G3}5,
DFβ(URβ) ≡ {G5} and DFα(URβ) ≡ {G5, G8}. Again, from Observation 2, α w β since
the output G8 ∈ DFα(URβ). However, β can never be detected at output G8.
Lower Bound
Theorem 9. A lower bound on the size of a collapsed fault list FL is the same as the lower
bound on the test set T such that each detectable fault in the circuit is detected by at least
one test in T .
Proof: Let FLmin represent a minimum collapsed fault list and Tmin represent a minimum
test set that detects all detectable faults in the circuit. Suppose |FLmin| < |Tmin|. Without
loss of generality, assume that |FLmin| = |Tmin| − 1. Then, by the pigeon-hole principle, ∃
t ∈ Tmin that detects faults that are already detected by other vectors ∈ Tmin. Then Tmin
cannot be a minimum test set; thus |FLmin| 6< |Tmin|.
Suppose |FLmin| > |Tmin|. Without loss of generality, let |FLmin| − 1 = |Tmin|. Then, using
the pigeon-hole principle again, either (i) ∃ t ∈ Tmin that must detect two faults α and β
in FLmin or (ii) one of the faults (say α) is redundant. In either case, we can eliminate
one fault from the collapsed fault list; then FLmin is not a minimum collapsed fault list.
Thus |FLmin| 6> |Tmin|. Since |FLmin| 6< |Tmin| and |FLmin| 6> |Tmin|, we can conclude that
|FLmin| = |Tmin|. ¦
5FIRE [136] analysis will not find the UR G1 for fault β.

Maheshwar Chandrasekar Chapter 5. Fault Collapsing and Test Generation 88
Krishnamurthy and Akers [138] showed that determining the minimum test set and its size
is NP-hard, even for an irredundant combinational circuit. Thus, from the above theorem,
determining the minimum size of a collapsed fault set is also NP-hard. On the contrary,
even if we have a minimum collapsed fault list FLmin, it may not be easy for an ATPG
engine to generate the minimum test set since it needs to generate a concurrent test for
each representative fault in FLmin [126]. However, Theorem 9 presents a lower bound on the
collapsed fault list size from a theoretical point of interest.
5.1.4 Algorithm and Implementation Details
Algorithm 6 Extensibility based Fault Collapsing
1: Structural analysis (equivalence + dominance) to obtain FL2: Compute static implications3: Perform FIREUR analysis (find redundant faults + UR)4: for each fault α ∈ FL do5: Obtain multi-node implications. Get reduced URα
6: Obtain DFα(URα)7: end for8: for each fault β ∈ FL do9: Obtain neighbor fault set Nβ
10: for each fault α ∈ Nβ do11: if Observation 2 holds true then12: Remove fault α from FL13: else if Theorem 8 holds true then14: Remove fault α from FL15: end if16: end for17: end for
The entire algorithm is illustrated in Algorithm 6. First, we perform a quick structural
FC (equivalence and dominance) to obtain an initial fault list FL. Although Theorem 8

Maheshwar Chandrasekar Chapter 5. Fault Collapsing and Test Generation 89
can capture such FC opportunities, we use structural FC instead to reduce the overall run-
time. Next, we identify static implications (direct, indirect and extended backward) [2].
We use these implications to perform FIRE analysis [136]. This analysis helps in removing
redundant faults - may not remove all redundant faults since FIRE is an incomplete but
low-cost technique. Also, URα for each α ∈ FL is implicitly determined during this analysis
(FIREUR analysis), as described in [137].
Next, for each α ∈ FL, we identify the multi-node implications of URα. This step may lead
to new non-trivial UR for α that cannot be identified during the above analysis. With this
updated set of UR, we compute and store DFα(URα). Memory footprint to store the learned
UR is usually very high, especially for large scale designs. For scalability, we store only the
antecedent of an implication (or implication path) if both antecedent and consequent are
part of the UR. For instance, reconsider the c17 circuit shown in Figure 5.2A. Let fault α
be gate G7’s output sa-1; then URα ≡ {G7, G3, G4}. Now, we reduce this to {G7} since
G7 → G3 and G7 → G4. In the sequel, we refer to this reduced set of UR as URα. One
may think that we may have to pay penalty in terms of run-time when accessing UR for
each fault. This is not true since we are only interested in determining the set of UR for
any fault; we can obtain this by identifying transitive closure of each assignment in URα, for
each fault α. In other words, we are not interested in any particular assignment in the UR
set. This is similar to the difference between linked list and array data structures. Further,
we may have to perform the antecedent check before adding an assignment to the UR set.
For practical cases, this time is usually negligible as shown in our experimental results!

Maheshwar Chandrasekar Chapter 5. Fault Collapsing and Test Generation 90
Finally, for each fault β in FL, we first identify the neighbor set Nβ [124]. This set is defined
as the set of faults that includes (i) G’s output sa-v, where G = v ∈ URβ or (ii) G’s input
(fanout branch of gate G′) sa-v, where G′ = v ∈ URβ. Then, for each fault α ∈ Nβ, if
observation 2 holds true, then we remove fault α from FL. Otherwise, if Theorem 8 holds
true then we remove fault α from FL. The set of remaining faults in FL is reported as the
final collapsed fault list.
Consider again the c17 circuit example discussed in Observation 2. Recall that for the fault
β: gate G8’s second input (the fanout branch from gate G7) sa-1, URβ ≡ {G7, G2}. After
structural FC, Nβ consists of the faults α0: gate G7’s output sa-1, α1: gate G9’s first input
(the fanout branch from gate G7) sa-1 and α2: gate G3’s output sa-0. Note that, structural
FC will identify G2’s output sa-0 ≡ G8’s output sa-1, G8’s output sa-0 w β, G9’s output
sa-0 w α1, G10’s second input (the fanout branch from G8) sa-0 ≡ G10’s output sa-1, G11’s
first input (the fanout branch from G8) sa-0 ≡ G11’s output sa-1 and G11’s output sa-1 w
α1. Thus such faults are not considered in Nβ. Our extensibility relation based dominance
analysis will determine that α0 w β and α2 w β. Thus, it will eliminate α0 and α2 from FL.
5.1.5 Experimental Analysis
We implemented EXTRACTOR (EXTensibility based dominance extRACTOR) in C++
on a Linux platform. Experimental analysis were conducted on a 3.0 GHz Intel Xeon ma-
chine with 2GB RAM and Linux OS. ISCAS85 [76] and full-scan versions of ISCAS89 [77]

Maheshwar Chandrasekar Chapter 5. Fault Collapsing and Test Generation 91
benchmark circuits were used. We compared EXTRACTOR with GRADER [124]6 (based
on Theorem 7) since it is the best known dominance extractor so far; it produced the most
compact fault lists prior to our work. Tables 5.1 and 5.2 report the FC results obtained for
the benchmark circuits, while Tables 5.3 and 5.4 summarize the resource usage results.
Table 5.1: EXTRACTOR vs.GRADER [124]- ISCAS85 [76]
Ckt TOTAL GRADER [124] EXTRACTOR %Rem.FAULTS |CL| CR |CL| CR Flts.
c432 1078 349 32.37 346 32.10 99.14
c499 1366 846 61.93 654 47.88 77.30
c1355 3366 614 18.24 614 18.24 100.00
c1908 4870 943 19.36 904 18.56 95.86
c2670 7282 1313 18.03 1153 15.83 87.81
c3540 9354 1704 18.22 1624 17.36 95.31
c5315 13988 2421 17.31 2369 16.94 97.85
c6288 14560 4111 28.23 4077 28.00 99.17
c7552 19942 3170 15.90 3105 15.57 97.95
c880 2396 535 22.33 533 22.25 99.63
AVG 7820.2 1600.6 25.19 1537.9 23.27 95.00
GRADER - Generates the most compact fault list prior to this workCL: Compact Fault List CR: Collapse Ratio
The formats of Tables 5.1 and 5.2 are the same. The first two columns show the circuit
instance and total number of uncollapsed faults in the circuit, respectively. The next two
columns report the size of the collapsed fault list and the collapse ratio (|Collapsed Fault list|
/ |Total Faults|) for GRADER [124]. The following two columns report the same metrics
for our FC tool, EXTRACTOR. The last column reports the percentage ratio of the size
of collapsed list obtained by EXTRACTOR over that obtained by GRADER. Thus, the
6We acknowledge V. Vimjam for providing us with the code for GRADER.

Maheshwar Chandrasekar Chapter 5. Fault Collapsing and Test Generation 92
Table 5.2: EXTRACTOR vs.GRADER [124] for full-scan ISCAS89 [77]
Ckt TOT. GRADER [124] EXTRACTOR %Rem.FLTS. |CL| CR |CL| CR Flts.
s5378 14866 2076 13.96 1949 13.11 93.88
s9234 28130 2682 9.53 2596 9.23 96.79
s13207 41212 4500 10.92 4224 10.25 93.87
s15850 49424 4773 9.66 4547 9.20 95.27
s35932 96290 12991 13.49 12972 13.47 99.85
s38417 115226 14022 12.17 13289 11.53 94.77
s38584 110406 16344 14.80 15728 14.25 96.23
s1196 3204 610 19.04 565 17.63 92.62
s1238 3226 634 19.65 585 18.13 92.27
s1423 3982 685 17.20 669 16.80 97.66
s1488 4158 785 18.88 744 17.89 94.78
s1494 4158 783 18.83 740 17.80 94.51
s208 582 105 18.04 104 17.87 99.05
s27 78 22 28.21 19 24.36 86.36
s298 800 145 18.13 145 18.13 100.00
s344 958 140 14.61 140 14.61 100.00
s349 968 141 14.57 139 14.36 98.58
s382 1030 207 20.10 189 18.35 91.30
s386 1064 225 21.15 222 20.86 98.67
s400 1074 213 19.83 186 17.32 87.32
s420 1170 211 18.03 210 17.95 99.53
s444 1168 214 18.32 186 15.92 86.92
s510 1346 267 19.84 263 19.54 98.50
s526n 1380 286 20.72 284 20.58 99.30
s526 1378 287 20.83 284 20.61 98.95
s641 2030 290 14.29 262 12.91 90.34
s713 2160 317 14.68 263 12.18 82.97
s820 2186 492 22.51 485 22.19 98.58
s832 2206 492 22.30 484 21.94 98.37
s838 2322 423 18.22 422 18.17 99.76
s953 2470 545 22.06 485 19.64 88.99
AVG 16150 2126 17.57 2044 16.67 95.03
GRADER - Generates the most compact fault list prior to this workCL: Compact Fault List CR: Collapse Ratio

Maheshwar Chandrasekar Chapter 5. Fault Collapsing and Test Generation 93
last column indicates the percentage of faults that our technique produces with respect to
GRADER. EXTRACTOR was able to further collapse the fault list than that obtained by
GRADER for all circuits except for c1355, s298 and s344, in which EXTRACTOR achieved
the same FC results as GRADER. We achieved a 14% additional FC for c499 than that
obtained by GRADER. When looking only at the collapsed faults, in c499, EXTRACTOR
results show that only 77% of the collapsed list obtained by GRADER is needed. On an
average, for both ISCAS85 and ISCAS89 circuits, EXTRACTOR results indicate that it
can further collapse the fault list reported by GRADER consistently by an additional 5%.
Thus, for a similar algorithmic run-time complexity, our FC technique can reduce the fault
list further.
Table 5.3: Resource Usage for ISCAS85 Benchmark
Ckt SI Time MemUR MR SU[124] Ours [124] Ours
c1355 0.03 0.84 0.27 1303.00 32(8 24) 97.54 3.08
c1908 0.06 1.45 1.09 2761.00 53(20 33) 98.08 1.33
c2670 0.08 1.83 0.76 3047.00 84(31 53) 97.24 2.40
c3540 0.68 9.44 14.99 19664.00 114(49 65) 99.42 0.63
c432 0.01 0.16 0.06 204.00 15(8 7) 92.65 2.64
c499 0.00 0.13 0.06 335.00 12(4 8) 96.42 2.09
c5315 0.37 3.62 2.27 7444.00 160(63 97) 97.85 1.60
c6288 0.35 2.65 1.32 1494.00 140(34 106) 90.63 2.00
c7552 0.82 9.39 8.34 14440.00 242(101 141) 98.32 1.13
c880 0.02 0.38 0.06 362.00 27(10 17) 92.54 6.55
AVG 2.44 2.99 2.92 5105.40 87.9(32.8 55.1) 96.07 2.34Time in seconds SI: Static Implications MemUR: Memory (KB) for storing UR
%MR: %Mem Reduction SU: Speed-Up
First two columns in Tables 5.3 and 5.4, shows the circuit name and time taken (in seconds)

Maheshwar Chandrasekar Chapter 5. Fault Collapsing and Test Generation 94
Table 5.4: Resource Usage for full-scan ISCAS89 Benchmark
Ckt SI Time MemUR MR SU[124] Ours [124] Ours
s1196 0.66 1.64 2.51 4528 66(35 31) 98.54 0.65
s1238 0.90 1.79 2.99 4430 73(41 32) 98.35 0.60
s13207 3.83 72.72 79.48 68320 435(110 325) 99.36 0.91
s1423 0.03 0.79 0.22 1560 43(14 29) 97.24 3.64
s1488 5.50 3.75 11.56 9910 132(84 48) 98.67 0.32
s1494 4.25 3.82 12.03 9919 133(85 48) 98.66 0.32
s15850 3.39 69.68 41.22 83K 536(151 385) 99.36 1.69
s298 0.01 0.15 0.03 229 9(4 5) 96.07 4.45
s344 0.01 0.18 0.03 332 10(3 7) 96.99 5.42
s349 0.01 0.18 0.03 333 10(3 7) 97.00 5.06
s35932 119 2211 1487 0.9M 5853(5120 733) 99.37 1.49
s382 0.01 0.19 0.04 281 11(4 7) 96.09 4.97
s38417 7.29 58.95 42.03 77843 1223(330 893) 98.43 1.40
s38584 149 8187 4416 1.8M 2328(1501 827) 99.87 1.85
s386 0.03 0.28 0.18 839 18(10 8) 97.85 1.58
s400 0.01 0.16 0.04 296 11(4 7) 96.28 4.00
s420 0.01 0.31 0.13 902 12(3 9) 98.67 2.42
s444 0.01 0.21 0.05 355 13(5 8) 96.34 4.38
s510 0.11 0.41 0.43 1194 22(10 12) 98.16 0.97
s526 0.02 0.27 0.09 537 18(9 9) 96.65 2.83
s526n 0.02 0.24 0.09 543 18(9 9) 96.69 2.62
s5378 0.41 5.82 3.19 10376 161(46 115) 98.45 1.83
s641 0.01 0.36 0.06 714 20(4 16) 97.20 5.84
s713 0.01 0.41 0.07 722 20(4 16) 97.23 5.99
s820 0.32 0.97 1.79 3329 44(29 15) 98.68 0.54
s832 0.37 1.00 1.84 3301 44(29 15) 98.67 0.55
s838 0.03 1.05 0.75 3091 25(7 18) 99.19 1.40
s9234 1.09 42.82 25.79 58762 322(110 212) 99.45 1.66
s953 0.52 1.53 2.35 3851 47(23 24) 98.78 0.65
AVG 10.23 367.86 211.45 0.1M 402(269 133) 98.01 2.42Time in seconds SI: Static Implications MemUR: Memory (KB) for storing UR
%MR: %Mem Reduction SU: Speed-Up

Maheshwar Chandrasekar Chapter 5. Fault Collapsing and Test Generation 95
for determining static implications. Next two columns shows the FC time (excluding static
implications time) for GRADER and EXTRACTOR respectively. The following two columns
report the memory consumed (in KB) by GRADER and EXTRACTOR for storing UR. For
EXTRACTOR, we considered the memory used by both UR (first value inside brackets) and
implication graph (second value inside brackets) since it has to find the transitive closure
(using implication graph) to determine the complete known UR for any given fault. How-
ever, for GRADER, we only considered the memory used by UR since it does not require
implication graph during FC. Last two columns indicate memory reduction and speed-up
achieved by EXTRACTOR over GRADER. Time taken for structural FC is ignored since it
is identical for both the methods.
In EXTRACTOR, when determining URα for each fault α during FIREUR analysis, we
perform the antecedent check (refer Section 5.1.4) before adding a gate assignment G = v to
URα. On an average, this overhead incurred only a mere 0.2 seconds for ISCAS85 benchmark
and 10 seconds for ISCAS89 benchmark circuits. Further, the memory reduction achieved
in terms of storing the UR is significant. For instance, for the large benchmark s38584, EX-
TRACTOR required only 0.13% of memory consumed by GRADER for storing the UR.
Tables 5.3 and 5.4 indicate that, on an average, EXTRACTOR required only 4% and 2%
of the memory used by GRADER for storing UR for ISCAS85 and ISCAS89 benchmark
circuits, respectively! Finally, our compact storage aided in speeding up the subsequent
steps to FIREUR analysis. This is evident from the 2.3× average speed-up achieved by
EXTRACTOR over GRADER. The speed-up achieved should be due to the compact stor-

Maheshwar Chandrasekar Chapter 5. Fault Collapsing and Test Generation 96
age (resulting in better cache/memory performance) since algorithmic complexities for both
GRADER and EXTRACTOR are similar. For instances with significant slow-down (speed-
up < 0.90), the total run time for both the tools was less than 15 seconds. This shows
that the antecedent check overhead is a burden only when the time taken for FC is much
less. Further, in terms of actual run time, the overhead caused by this check is insignificant.
Overall, our compact storage of UR helped in significantly reducing the memory footprint,
which in turn resulted on an average 2.3× speed-up.
One may point out that the test generation time may be smaller than the FC time for certain
benchmark circuits. Such comparison may not be fair since the test patterns generated using
EXTRACTOR’s (or even GRADER’s) CFL will be more compact than that generated using
the uncollapsed (or just structurally collapsed) fault list. The reason is that our FC technique
identifies several non-trivial α ⊇ β relationship among faults and eliminates fault α from
the CFL. If they are not collapsed then the test generator may obtain one test vector each
for fault α and fault β. Thus, we need to consider the test set compaction quality and
generation time when doing such a comparison. This is an interesting future direction for
research since both FC and test set compaction are essential components of commercial test
generation packages!

Maheshwar Chandrasekar Chapter 5. Fault Collapsing and Test Generation 97
5.1.6 Summary
Obtaining a compact fault list is essential since it has a direct impact on the costs incurred
for Manufacturing Test. We proposed a novel extensibility relation that supersedes the
containment relation, which had achieved the best fault dominance analysis results prior to
our work. We also realized a special case of detection dominance not reported by any of
the low-cost FC engines proposed in the literature. Further, we theorized a lower bound
on the size of a collapsed fault list. Finally, results on ISCAS85 and full-scan versions of
ISCAS89 benchmark circuits reveal that, on an average, we were able to eliminate 5% of the
collapsed faults reported by the best known low-cost dominance-based FC engine GRADER.
Further, the results show that our technique required only 2%− 4% of the memory used by
GRADER, which provided for a 2.3× average speed-up for our technique. Future Work:
One future direction is to intelligently enrich the FC engine with low-cost mechanisms to
identify detection dominance’s as well. Another one is to study the effects of fault collapsing
on test set generation time and compaction quality.
5.2 Multi-Valued SAT-based ATPG
5.2.1 Introduction
Automatic Test Pattern Generation (ATPG) is a widely studied problem for the past four
decades. Algorithms that address the ATPG problem attempt to generate a test pattern,

Maheshwar Chandrasekar Chapter 5. Fault Collapsing and Test Generation 98
if any, for the target fault (single stuck-at fault model) in the circuit. Since ATPG is
an NP-complete problem [139], several heuristics and learning techniques were proposed
in literature [48, 4, 15, 50, 46, 67, 53, 54, 55, 64] to speed up test pattern generation. Roth
proposed the D-algorithm [4] in 1966 for combinational test generation and proved that it
is complete. In [15], Goel proposed an implicit enumeration algorithm that searches only on
primary inputs to generate a test pattern for the target fault. In [67] the authors proposed an
efficient learning technique for test generation and other CAD problems. In [50] the authors
learned from conflict-yielding search states and used such information in subsequent searches
to avoid these non-solution search subspaces. With such learning they showed significant
improvement for the underlying ATPG algorithm. However, their technique is devoid of
conflict analysis and identifies an over-specified search-state as reason for a conflict. In [46]
the authors perform a level-dependent analysis to backtrack non-chronologically in case of
path sensitization conflicts, which helps in avoiding non-solution subspaces. Their analysis
does not result in learned search states that could be used for future searches.
In recent years, there is a significant interest in using Satisfiability (SAT) solvers for ATPG. In
[53] the author modeled ATPG as a Boolean SAT problem. Subsequently, several techniques
to improvise this formulation were proposed in [54,55,56,57]. In [54] the authors propose a
set of greedy heuristics to solve the test generation problem using SAT. In [55] the authors use
a new data structure for the implication graph and incorporate approaches like single-cone
processing and backward justification to improve their SAT framework for test generation.
In [56] a complete algorithm based on transitive closure of implication graph was proposed

Maheshwar Chandrasekar Chapter 5. Fault Collapsing and Test Generation 99
and in [57] algorithms for solving Boolean SAT instances of several combinational circuit
problems like test pattern generation and equivalence checking were proposed. All of these
methods model the ATPG problem in the Boolean domain using clauses that encode the
underlying circuit. However, in reality, ATPG is a problem in the multi-valued domain
{0, 1, D, D,X}.
In this section, we propose a new ATPG framework based on multi-valued SAT and attempt
to solve the ATPG problem directly in the multi-valued domain itself [58]. The framework
inherits the powerful features of a SAT solver, such as conflict-driven learning and faster
constraint propagation and at the same time reduces the size of the problem. Further, we
investigate the powerful search-space pruning that is based on search-states in the decision
tree and integrate it into the multi-valued framework. We propose a new method to learn the
exact reason for path sensitization conflicts and to perform non-chronological backtracking.
We also propose an efficient representation to store conflict reasons, which helps to prune
such search subspaces when encountered again. Furthermore, our conflict analysis has the
potential to identify several unpropagable search states from a single path-sensitization con-
flict. Experimental results reveal the promise of our approach, in which significantly higher
coverages were obtained with fewer aborted faults for most circuits.
The rest of this section is organized as follows. We discuss preliminaries in Section 5.2.2.
The new multi-valued framework for ATPG is proposed in Section 5.2.3. In Section 5.2.4
we discuss our conflict analysis method, conflict search states representation and the early
backtrack possible with our method. Section 5.2.5 presents the experimental results and

Maheshwar Chandrasekar Chapter 5. Fault Collapsing and Test Generation 100
Section 5.2.6 concludes the section.
5.2.2 Preliminaries
Multi-Valued SAT (MV-SAT)
We use the notation and definitions followed in [59] for MV-SAT. A few of the definitions
are reviewed below:
• Multi-Valued Variable: A variable in the MV-SAT problem with domain size greater
than one. Example: x is a multi-valued variable with domain {0, 1, D, D}.
• Multi-Valued Literal: A multi-valued literal is a Boolean function defined on a multi-
valued variable with respect to a subset of its domain. Example: x1D is a multi-valued
literal. It will evaluate to true if and only if the multi-valued variable x is assigned
from {1, D}, which is a subset of its domain {0, 1, D, D}.
• Multi-Valued Clause: A multi-valued clause is a logical disjunction of multi-valued
literals. Example: (x1D + y0D).
• Multi-Valued Conjunctive Normal Form (MVCNF) formula: A MVCNF formula is a
logical conjunction of multi-valued clauses. Example: (x1D + yD)(a1 + b0D)

Maheshwar Chandrasekar Chapter 5. Fault Collapsing and Test Generation 101
Background on Search State based learning
In [60], the authors showed that simulation of a partial primary input assignment decomposes
the logic circuit. In [50] the authors use this information to define a search state as the
circuit decomposition at any decision point in the ATPG search. Furthermore, an E-frontier
is defined as a set of assigned gates connected to at least one of the primary outputs through
an X-PATH [50]. An X-PATH is a path of nodes whose values are all don’t-care (X). Any
search state in the ATPG decision tree can be uniquely represented by the corresponding E-
Frontier in the circuit. The logic decomposition formed by an E-frontier in the circuit is also
called cut-set for the search state in the circuit. The three terms: search state, E-Frontier
and cut-set for the search state represent the logic decomposition of the circuit and hence are
used interchangeably in the subsequent discussion. Precise definitions adopted from [61,66]
needed to describe our algorithm are given below.
• Decision Tree: The tree obtained by the branch-and-bound ATPG procedure, with
input assignments as internal decision nodes.
• Search-State: After choosing each decision and performing logic simulation/implication,
logic values of all the internal gates form a search state in the circuit.
• Cut-set: Consider the circuit as a directed acyclic graph, G, with directed edges
connecting the internal gates. Let C be a subset of the directed edges in G that
partitions the graph into two disjoint sub-graphs X and Y . Then, the conjunction of
all the tail nodes of C forms a cut-set.

Maheshwar Chandrasekar Chapter 5. Fault Collapsing and Test Generation 102
• Cut-set for the search-state: Each search-state can be uniquely represented by a
cut-set in the circuit. After each decision, the cut-set can be obtained by a multiple
backtrace from the primary outputs. The first frontier of specified nodes, encountered
during the backtrace, is the cut-set for the search-state. In the sequel, we use the term
cut-set to refer to “cut-set for the search-state”.
For the circuit in Figure 5.3(A), a partial decision tree is shown in Figure 5.3(B). The
sets indicated on the decision edges (for example: {g1} and {g1, f 1, b0}) are cut-sets
for the corresponding search-states. For the last decision (b0), the cut-set {g1, f 1, b0}
is denoted by the dashed line, in Figure 5.3(A).
• solution/conflict branch: A branch in the decision tree that has at least one/no
solution below it.
• solution/conflict cut-set: A cut-set for the search-state in the solution/conflict
branch.
• solution/conflict subspace: A search subspace below a solution/conflict branch.
• activated cut-set: A cut-set in the circuit which contains at least one gate with
{D/D} value.
• unpropagable cut-set: An activated cut-set in the circuit in which no gate with a
D or D can be observed at any of the primary outputs.
• propagable cut-set: An activated cut-set in the circuit in which at least one gate

Maheshwar Chandrasekar Chapter 5. Fault Collapsing and Test Generation 103
with a D or D can be observed at at least one of the primary outputs.
• search state dominance: A search state S1 dominates another search state S2 if and
only if
1. the gate assignments in S1 are contained in S2
2. all {D/D} values in S2 are contained in S1.
In our work, we also call search-state dominance as D-dominance for short. Example:
Consider three search states: S1 = {a1, bD}, S2 = {a1, bD, c0}, and S3 = {a1, bD, cD}.
S1 D-dominates S2, but S1 does not D-dominate S3.
(B) Decision Tree
d{g }
b1
0 {g , f , b }1
1
1
(A)Search State Representative
a
b
c
d
g
f
X
1
1
Xh
zX
X
0
X
1
e
0
Figure 5.3: Cut-sets in the Search Space.
A given cut-set in the circuit will lead to a specific search subspace in the decision tree.
In [50], the authors stored the cut-sets that lead to conflict sub-spaces in a hash-table.
After each decision, the current cut-set is searched in the hash-table. If an exact matching
cut-set exists, they simply link the current branch to the stored node of the decision tree.

Maheshwar Chandrasekar Chapter 5. Fault Collapsing and Test Generation 104
Otherwise, they proceed with the usual search process. In this way, previously encountered
search subspaces are not repeatedly explored. However, such an approach does not consider
the following:
1. The exact reason for a path sensitization conflict may be a subset of the current
E-Frontier, which can be stronger than the search state represented by the E-Frontier.
2. An exact match of the latest activated cut-set (LAC) with one of the hash-table entries
(HT), in order to prove that LAC is unpropagable, is an over-specified requirement. It
was proved in [66] that a LAC is unpropagable if it is D-dominated by any of the
HT. However, no experimental results were provided to prove its practical importance.
Our algorithm addresses both of these issues. We perform conflict analysis whenever a path
sensitization conflict occurs and store the unpropagable cut-sets information in terms of
multi-valued clauses and hash-table entries. Furthermore, our conflict analysis may learn
several additional unpropagable cut-sets other than the current one as byproducts. In the
rest of this section, when we use the term conflict we refer to “path sensitization conflict”
unless otherwise specified.
5.2.3 Multi-Valued SAT Framework for ATPG
In this section, we describe our framework to represent a given circuit as a MVCNF formula,
from which the test patterns are generated for stuck-at faults in the circuit. The MVCNF

Maheshwar Chandrasekar Chapter 5. Fault Collapsing and Test Generation 105
formula is simply the logical conjunction of the MVCNF clauses for each gate. We first
convert the given circuit into a AND-INVERTER Graph (AIG) using the publicly available
ABC tool [62]. Hence we present the MVCNF formula only for these two gate types in
Figure 5.4. However, our approach does not require the circuit to be in the AIG form, and
the formula for other types of gates can also be obtained.
cb
a
a b
(A) AND
(B) NOT
(a01D + b0DD + cD)(a01D + b01D + c0)(a01D + b01D + cD)
(a0DD + b01D + cD)(a0DD + b0DD + c1)(a0DD + b01D + cD)
(a01D + b0DD + cD)(a01D + b01D + c0)(a01D + b01D + cD)
(a1 + c0DD)(b1 + c0DD)(c0 + a1DD)(c0 + b1DD)
(bD + a01D)(bD + a01D)(b1 + a1DD)(b0 + a0DD)
Figure 5.4: Multi-Valued Clauses
Test Pattern Generation
For test pattern generation, for a target fault, we add a new variable at the fault site to
disconnect it from the rest of the circuit. This new variable replaces the original variable,
within the clauses for gates in the fanout cone of the target fault. We then simply assert
the excitation Boolean value for the original variable at the fault site and the corresponding
fault-effect value (D or D) for the new variable. Unlike [53], where the fanout cone of the
fault site has to be duplicated, we need not duplicate them since we are representing the
problem in the multi-valued domain. Then we call our multi-valued SAT solver for this

Maheshwar Chandrasekar Chapter 5. Fault Collapsing and Test Generation 106
MVCNF formula. Decisions are made only at the primary inputs as in [15], in order to
ensure that the cut-sets learned are justified.
b
d
kf
g
ca
e
hji
Figure 5.5: Example Circuit 1
Consider the circuit shown in Figure 5.5. Suppose the fault is output of gate k stuck-at-1.
Figure 5.6 shows the original and newly generated clauses that involve gate k. Variable l
is the newly introduced variable. The newly generated clauses are included in the MVCNF
formula for the circuit, instead of the original clauses. Note that because the fanout cone
for the fault need not be duplicated, the size of the new formula is nearly the same as the
original.
(b01D + c0DD + kD)(b01D + c01D + kD)(b01D + c01D + k0)
(b01D + c0DD + kD)(b01D + c01D + k0)(b01D + c01D + kD)
(b0DD + c0DD + l1)(b0DD + c01D + lD)(b0DD + c01D + lD)
(l0)(kD)(l0 + b1DD)(l0 + c1DD)(l0DD + b1)(l0DD + c1)
(b01D + c0DD + lD)(b01D + c01D + lD)(b01D + c01D + l0)
(b01D + c0DD + lD)(b01D + c01D + l0)(b01D + c01D + lD)
(A) Original Clauses
(B) Newly generated clauses
(k0 + b1DD)(k0 + c1DD)(k0DD + b1)(k0DD + c1)
(b0DD + c0DD + k1)(b0DD + c01D + kD)(b0DD + c01D + kD)
Figure 5.6: Multi-Valued clauses for k s@1

Maheshwar Chandrasekar Chapter 5. Fault Collapsing and Test Generation 107
5.2.4 Search State Based Learning
In this section, we first present an example to illustrate the need for our approach. Next, we
discuss our learning procedure, conflict cut-set representation, and early backtrack enabled
with our method. Finally, we discuss the number of unpropagable cut-sets that can be
learned from a conflict.
A Motivating Example
Consider the same circuit and stuck-at fault discussed in the previous section. The decision
tree is shown in Figure 5.7 for our discussion. The cut-set after the fourth decision on gate
c is {e1, d1, kD}. As shown in the decision tree there is no solution below this search space.
An analysis of this scenario yields that with d1, a D on gate k cannot be propagated to the
primary output j.
First, in conventional cut-set based learning methods [50,51], the complete cut-set {e1, d1, kD}
is learned as a conflict yielding search state because the entire E-frontier is stored. This is
a weaker learning since {d1, kD} in the frontier is the exact reason for the conflict. In sub-
sequent searches, whenever {d1, kD} D-dominates the latest activated cut-set (LAC), it can
be concluded that the LAC is unpropagable. In addition, it may be observed that {d1, kD}
is also unpropagable because with d1, all paths from k to the primary output are blocked.
This can be generalized to any other blocked nodes to identify other unpropagable cut-sets.
Hence, we are able to learn several unpropagable cut-sets from a single conflict analysis.

Maheshwar Chandrasekar Chapter 5. Fault Collapsing and Test Generation 108
MS: Masked Sensitized gatesDL: Decision Level
C: ConflictCR: Conflict Reason
0 1
e
d
b
c
a
CC
DL: 0
1
1
0
1{e1, d1, kD}
DL: 1
DL: 2
DL: 3
DL: 4
{e1, d1}
{e1, d1, kD}
CR: {d1}MS: {kD}
{e1}
Figure 5.7: Decision Tree
Conflict Analysis and Learning
A path sensitization conflict occurs when all possible propagation paths from the fault site
are blocked. So whenever a conflict occurs, we first perform a traversal in the fault site’s
fanout cone and record the portion of LAC within the cone, which we call EmptyD. Note
that EmptyD is sufficient to represent the current scenario of all propagation paths be-
ing blocked. During the fanout-cone traversal, we also identify the maximal decision level
(prev Dblocked lev) at which a propagation path was blocked, such that prev Dblocked lev is
strictly less than the current decision level. The initial value of prev Dblocked lev is set to
be the decision level at which fault was excited. Then, we perform antecedent tracing [46]
(traverse the implication graph backwards) for each gate in EmptyD and record the first
antecedent nodes decided at a level less than the current decision level. The recorded nodes
together with the currently decided node is the exact reason for the current conflict.

Maheshwar Chandrasekar Chapter 5. Fault Collapsing and Test Generation 109
Suppose we encounter a conflict for both Boolean values of the current decision variable,
then we perform the above analysis in both cases and resolve the two reasons7. Let this
resolved reason be represented by CR, which is a subset of the search state obtained before
the current decision. In future ATPG searches, whenever this CR D-dominates the LAC
obtained, we can safely conclude that this LAC is unpropagable, and the search can simply
backtrack as there is no solution under this search space.
Let current Dblocked lev represent the maximal decision level at which the gates in CR
is assigned. Now we can backtrack non-chronologically to the max(current Dblocked lev,
prev Dblocked lev), since the search space below this level provably does not contain a solu-
tion [46]. It may be observed that prev Dblocked lev will always be identical for both Boolean
values of the current decision variable.
We illustrate the above discussion with the following example. Consider the k s@1 fault sce-
nario discussed previously. Let the current decision be a0. We encounter a path sensitization
conflict due to this decision as shown in Figure 5.7. A fanout cone traversal from the fault-
site yields that EmptyD is {j0}. We also find that prev Dblocked lev is the level at which
fault was excited (decision level 2), since no decision other than the current one blocked a
propagation path. Antecedent tracing from j0 identifies that a0 is the reason for the current
conflict. Next, a similar analysis for a1 decision yields that {d1, a1} is the reason for the cur-
rent conflict. Thus CR = {d1}, which is the binary resolution of the two identified reasons.
In future ATPG searches, we can backtrack whenever {d1, kD} D-dominates the latest cut-
7Binary resolution can be performed by taking union of the two reasons and eliminating the currentdecision variable.

Maheshwar Chandrasekar Chapter 5. Fault Collapsing and Test Generation 110
set as there is no solution under this search space. Furthermore, current Dblocked lev is level
1 and hence the non-chronological backtrack level for the current conflict is 2 (max(2,1)),
indicating that the search can directly backtrack all the way to level 2.
Unpropagable Cut-Set Representation
We complement the conflict reason, CR, which is a conjunction of literals, to form a multi-
valued clause mvc. A corresponding hash entry mvh is also created for the mvc using the
gates with a D or D in the unpropagable cut-set being learned. Using the same running ex-
ample, with CR = {d1} and an unpropagable cut-set that can result from this conflict being
{d1, kD}, the {mvc,mvh} pair would be {(d0DD), kD}. We maintain the clauses generated
from our conflict analysis separately and use a one-literal watching scheme to identify if a
clause is UNSAT. During BCP, when a clause mvc becomes UNSAT we compute the set of
gates having D or D in the latest cut-set and check if it is equivalent to the clause mvc’s
corresponding hash-table entry mvh. If equivalent (now both the conditions of D-dominance
are satisfied), then we backtrack, otherwise we proceed with our search. In this way, our
approach can identify if a learned conflict yielding search state D-dominates the current
search state and act accordingly.
Early backtrack
Consider the circuit in Figure 5.8. Let the target fault be a s@1. The decision tree in Figure
5.9(A) represents a partial search process. We learn that the cut-set {iD}, obtained after

Maheshwar Chandrasekar Chapter 5. Fault Collapsing and Test Generation 111
abcde
f
i
h
j
g
l
Figure 5.8: Example Circuit 2
the second decision (a0), cannot be propagated. So we create a multi-valued clause mvc
and hash table entry mvh to represent this unpropagable cut-set. Suppose the next fault
is b s@1. The decision tree in Figure 5.9(B) represents a partial search process. After the
fourth decision (a1), our method backtracks immediately because the previously learned mvc
becomes UNSAT and the gates having a D or D in the latest cut-set (when mvc becomes
UNSAT) matches with the corresponding mvh. Existing methods [50, 51] cannot backtrack
after the a1 decision because the cut-set that is obtained after this decision is {jD} rather
than {iD}. Hence our method is able to perform earlier backtrack compared to the existing
search state based learning methods.
Byproducts from conflict analysis
Consider an unpropagable cut-set, {a0, bD, cD, d1}; it was proved in [51] that {a0, bD, cD, d1}
is also an unpropagable cut-set. Hence at least two unpropagable cut-sets can be learned for
each conflict. In our work, we attempt to generate more unpropagable cut-sets from each
conflict. Using the earlier k s@1 example (in Figure 5.5), it can be seen that kD and e1 in the
cut-set does not occur in the CR. We refer to such gates as masked sensitized (MS) gates.

Maheshwar Chandrasekar Chapter 5. Fault Collapsing and Test Generation 112
{iD}
e
a
b
1{b1}
0
1
C C
0
(B) b stuck at 1(A) a stuck at 1
c
d
b
a{jD}
{c1}1
1
0
1C
{h1}
{bD, h1}
Figure 5.9: Decision Tree
MS gates are not part of the CR because they were blocked by a controlling value at the
side inputs of the successor gates. For instance, the MS gate k in our example is blocked
at gate f for the a0 decision and at gate i for the a1 decision. Irrespective of the value on
the MS gates, any cut-set (CC) D-dominated by CR (without considering the MS gates in
CC for D-dominance) is always unpropagable because CR is unpropagable and MS gates
will be blocked.
Suppose in subsequent ATPG searches, we encounter a LAC of {eD, d1, kD}. From the
previous conflict analysis, if we had learned {(d0DD), (kD)} as the only {mvc,mvh} pair,
then we cannot conclude that LAC is unpropagable. The reason is that, although the mvc
becomes UNSAT, the corresponding hash-entry does not match all the gates with a D or D
in LAC. On the other hand, if we had also learned {(d0DD), (eD, kD)} as a {mvc,mvh} pair,
then we would be able to conclude that LAC is unpropagable. Note that a single mvc may
have several corresponding mvh’s.

Maheshwar Chandrasekar Chapter 5. Fault Collapsing and Test Generation 113
Consider a conflict analysis that identified n MS gates. Then the number of unpropagable
cut-sets that our approach can learn from this conflict is 2×3n: one 3n is for the original set
of gates having a fault-effect in the CR and another one for the complemented fault-effect
values on the same set of gates. The 3n term arises from the fact that each of the n MS
gates can take any of the value in {D, D,X} in the unpropagable cut-sets being learned.
In our implementation, for each conflict involving n MS gates, while our approach allows us
to learn all 2×3n unpropagable cut-sets, we generate only 2×(2n+4) unpropagable cut-sets
to avoid exhaustively enumerating them. The 2n term comes from the following: for each
MS gate g, we can have one unpropagable cut-set to include gD, and another unpropagable
cut-set to include gD. The constant 4 term is arbitrary, meaning that we include only 4
unpropagable cut-sets with all n MS gates having a fault-effect, rather than enumerating all
2n combinations. For example, when n = 4, instead of enumerating all 24 = 16 combinations
((gD1 , gD
2 , gD3 , gD
4 ); ...; (gD1 , gD
2 , gD3 , gD
4 )), we simply pick 4 cases from them.
5.2.5 Experimental Results
The proposed method was implemented in C++. The experiments were conducted on a 3.0
GHz Intel Xeon machine with 2GB RAM, running the Linux Operating System. To illustrate
the efficiency of our technique we did not incorporate other techniques, such as those in [49,
54,55,46,56,65,64,52], to mention a few. In addition, we did not use initial random pattern
fault simulation nor redundancy analysis to remove faults from the fault-list. However,

Maheshwar Chandrasekar Chapter 5. Fault Collapsing and Test Generation 114
Table 5.5: Efficiency of Our Algorithm
Conventional cut-set-based learning Our multi-valued-based learningCkt #Fault Det Red Abt Mat/Mis Time Det Red Abt Mat/Mis Time
c432 590 561 6 23 2515/41355 6 561 25 4 1368/285371 2
c499 1274 1122 0 152 447/185202 43 1272 0 2 2572/24091 3
c1355 1402 1318 0 84 590/150085 35 1400 0 2 2685/32877 3
c1908 1232 1210 2 20 1011/38237 6 1227 3 2 1055/9436 1
c2670 1888 1878 7 3 904/19075 3 1878 10 0 1760/17499 2
c3540 2632 2596 1 35 3125/67546 23 2631 1 0 83/3884 4
c880 974 974 0 0 210/7480 0.7 974 0 0 0/0 0.4
c5315 4180 4178 0 2 1088/38647 12 4180 0 0 214/13323 6
c6288 7518 7309 0 209 4341/452903 581 7491 0 27 2037/573572 248
c7552 5100 5053 16 31 2232/86211 38 5060 38 2 1207/141852 15
s9234 4782 4716 40 26 1763/80189 26 4723 59 0 1359/1966703 20
s9234.1 4780 4715 33 32 2338/83899 28 4727 53 0 1381/1897268 20
s15850 9662 9543 111 8 1251/101773 63 9548 114 0 138/4857660 74
s15850.1 9676 9562 111 3 1262/90800 60 9565 111 0 117/3542459 61
s13207 7952 7904 48 0 795/55594 34 7904 48 0 10/17853 19
s13207.1 7980 7929 47 4 2543/75833 50 7933 47 0 12/20203 19
s35932 26804 26804 0 0 7810/107625 345 26804 0 0 0/0 253
s38417 26454 26248 13 193 7552/501828 737 26413 37 4 4276/11541 173
Total 124880 123620 435 825 41777/2184282 2090.7 124291 546 43 20274/13415592 923.4
Det: Detected Red: Redundant Abt: Aborted Mat/Mis: # of hash-table matches/missesTime is reported in seconds Backtrack limit of 1000 was used for all circuits
we used the conflict analysis proposed in [59] for justification conflicts. We compared our
method with PODEM implemented with the conventional cut-set based learning [50] for
ISCAS85 and full scan versions of ISCAS89 benchmark circuits. The conventional cut-set-
based learning method learns from both justification and path sensitization conflicts. The
results are presented in Table 5.5. For both techniques, a backtrack limit of 1000 was used.
In Table 5.5, the first and second columns report the Circuit Under Test (CUT) and the total
number of faults in the fault-list. The next five columns report the number of detected faults,
number of redundant faults, number of aborted faults, number of hash-table matches/misses
and time taken for test pattern generation for the “conventional cut-set-based learning”

Maheshwar Chandrasekar Chapter 5. Fault Collapsing and Test Generation 115
method. The last five columns report the same data for our approach. The last row shows
the total for all CUT’s. The number of hash-table matches/misses are not comparable
because of the following reasons:
1. In the “conventional cut-set-based learning”, a hash-table check is performed after
logic simulation of each primary input decision. However, in our algorithm a hash-
table check is performed only when one of the mvc clauses becomes UNSAT.
2. “Conventional cut-set-based learning” method might enter non-solution subspaces,
which our algorithm might avoid (discussed in Section 5.2.4), and find more hash-
table matches/misses.
In Table 5.5, boldfaced values indicate better results (higher detection, more redundant faults
identified, fewer aborted faults, shorter execution times). In terms of the number of aborted
faults, our algorithm consistently performs equal or better than the “conventional cut-set-
based learning” method. For example, in circuit s38417, the cut-set based method aborted
on 193 faults, while ours only aborted 4 faults, together with more than 75% reduction in
execution time!
We did not include Success-driven learning in our method. In other words, we did not learn
on propagable cut-sets. However, such learning was included in the ”conventional cut-set-
based learning” method with which we compared our results. In spite of this, the fact that
our method still outperformed the cut-set-based learning method indicates the supremacy
of our method. Finally, our learning technique is a complement and not a competition to

Maheshwar Chandrasekar Chapter 5. Fault Collapsing and Test Generation 116
any of the previously published ATPG techniques [53, 54, 46,55,49,56,65,64,52,67].
5.2.6 Summary
We have presented a new multi-valued framework for ATPG. We also propose an efficient
learning method for path-sensitization conflicts and representation of these conflict cut-sets
to avoid such states during the ATPG search. Our method allows for the identification
of intermediate conflict cut-sets during BCP and is able to backtrack early, which is not
possible with existing search-state based learning methods. Experimental results showed
that our test generation approach was able to achieve significantly higher fault coverages
with fewer aborted faults and smaller run times.
5.3 Chapter Summary
Fault Collapsing has a direct impact on test economics during Manufacturing Test. In this
chapter, we proposed an efficient fault collapsing approach based on a novel extensibility
relationship exhibited by fault-pairs. Since ATPG is a multi-valued problem, we propose a
new multi-valued framework unlike approaches to model and solve test generation problem.
Finally, we also elegantly integrate an efficient learning mechanism into this multi-valued
framework that aids to learn on propagation conflicts during test generation. Our experi-
mental analysis indicated the promise of our approach.

Chapter 6
Diagnostic Test Generation
6.1 Introduction
Diagnostic Test Generation is the process of generating diagnostic test patterns to distinguish
a given set of fault-pairs in the CUT. In [5, 6], the authors proposed the first complete
diagnostic test generation engine based on the D-algorithm [4]. In [7], the authors proposed
to use fault detection status to reduce the number of fault pairs that needs to be considered
during ADTG. Essentially, any pair involving at least one untestable fault can be immediately
ignored since such pairs can be either distinguished (if only one fault of the pair is untestable)
or can never be distinguished (if both the faults are untestable). So the authors in [7], first
performed a detection oriented test generation (usually referred to as ATPG) and then
collected only the detected faults for consideration during the ADTG. Further, the authors
117

Maheshwar Chandrasekar Chapter 6. Diagnostic Test Generation 118
Figure 6.1: ADTG Flow
proposed an interesting X-filling method of the ATPG patterns with the objective of de-
sensitizing as many paths in the circuit under test (CUT) as possible. The motivation was
to hinder the propagation of fault effects to outputs other than that where the target fault
is detected. This in turn may imply a greater distinguishability of the target fault with
other faults in the fault list. After this X-filling of ATPG patterns, diagnostic simulation
is performed to determine fault-pairs that can be distinguished with these patterns. For
the remaining unresolved pairs, the dedicated ADTG is performed. Most of the complete
ADTG algorithms published since then are based on a similar flow to the above described
procedure, illustrated in Figure 6.1.
In [8,116,10], the authors split the search space for ADTG based on the observation that for
distinguish-ability, at least one of the faults in the target pair must be detected. Further,
the authors in [8] use δ-path (similar to X-path in ATPG) for identifying conflict spaces.
In [116], the search space is split into three based on the three distinct cases when a fault

Maheshwar Chandrasekar Chapter 6. Diagnostic Test Generation 119
pair can be distinguished. In [10], the authors use illegal state information to speed up the
test generation for sequential circuits. A striking similarity between detection and diagnosis-
oriented test generation is that in both cases, we try to excite and propagate a value difference
(on an arbitrary signal) between the two machines under consideration. Although this notion
is implicitly observable in [8, 116], the authors in [10] explicitly modeled the ADTG as a 2-
phase detection-oriented test generation problem, allowing for leveraging advances in ATPG
tools to ADTG. Later, in [118], the authors further refined the model proposed in [10] to use
a single pass ATPG to distinguish a given fault pair.
Aside from the development of complete ADTG algorithms discussed above, there has been
several low-cost preprocessing steps ( [11, 12, 13, 117]) to reduce the number of fault-pairs
to be considered by the ADTG. However, to reduce the candidate fault set size for silicon
diagnosis, we need a complete and aggressive ADTG engine. This is because most of the
fault pairs in the final candidate set will usually be either equivalent or hard-to distinguish.
Our main contributions [127,128] in this chapter are:
• We propose a novel learning framework based on search state extensibility. This frame-
work allows us to quickly identify non-trivial redundant search states during the ATPG
search process and perform appropriate search space reduction.
• We show that the proposed learning framework can be incorporated for ADTG since
the problem of distinguishing a given fault-pair can be modeled as an ATPG problem.
• We propose a new and efficient ADTG engine with incremental learning based on the

Maheshwar Chandrasekar Chapter 6. Diagnostic Test Generation 120
flow shown in Figure 6.1. Information learned during ATPG can be incrementally
utilized during ADTG. Further, the learned information can also be utilized across
faults and fault-pairs during ATPG and ADTG respectively.
• Finally, we propose an X-filling method based on output deviation measure with the
objective to enhance diagnostic resolution of the detection-oriented test patterns.
Outline: Next section presents prior work that is related to our contribution in this chapter.
The subsequent section describes the proposed incremental learning framework. Section 6.4
explains the output deviation based X-filling method. Finally, Sections 6.5 and 6.6 present
the results of our experimental analysis and concludes the chapter respectively.
6.2 Related Work
6.2.1 E-Frontier based learning
In [50], the authors proposed to learn E-Frontiers obtained after each decision during the
search process. E-frontier is defined as the frontier of assigned nodes F in the CUT (obtained
after complete logic simulation of the current decision) such that for each gate g in the CUT
that has an X-path to at least one primary output, g ∈ F . The learned E-Frontiers were
classified into success and conflict frontiers based on whether they lead to a success or a
conflict state. In future search, whenever the learned frontier becomes equivalent to the
current E-frontier they conclude that the current intermediate search state is redundant. In

Maheshwar Chandrasekar Chapter 6. Diagnostic Test Generation 121
the sequel, we refer this method as EST method. Our method differs from the EST method
in several major ways:
1. Let F be the E-Frontier just before node N in the DT . Note that R returned by AT
for a decision at N will be a subset of F . Since our learning is based on R (refer
Section 6.3) the search states learned by our method will be a subset of F . Thus we
use a more succinct notation than EST method to represent visited search states.
2. Extensibility is a generalized notion of equivalence; if a learned state is equivalent to
the current E-Frontier then it is also extensible to the current E-Frontier. However,
the reverse need not be true.
3. We check for extensibility after each implication obtained from the current decision.
However, EST methods check for equivalence only after the complete logic simulation
of the current decision.
From the above differences it can be observed that our method will enable us to determine
non-trivial redundant search states that may not be identified by the EST method. Further,
we use clauses to represent the learned search states. One-literal watching scheme on the
learned clause database is used to determine if the learned state becomes extensible to the
current search state. This is similar to the efficient two literal watching scheme proposed
in [18]. Thus we do not have to compute the current E-Frontier and compare it with the
learned search states to determine if it is redundant. However, we need to perform the
false-positive or false-negative check (refer Section 6.3) if the extensibility occurs. Note that

Maheshwar Chandrasekar Chapter 6. Diagnostic Test Generation 122
for typical circuits with bounded fanin, the number of interconnections between gates in
the CUT is linearly related to the number of gates in the CUT . Since a false-positive or a
false-negative check visits each interconnection in the CUT at most once they are linear in
time complexity [46].
6.2.2 Output Deviation
Output deviation metric was originally proposed in [22] to enrich the test set obtained for
classical fault models. Later, it was used in [26] to quickly assess the test set quality and
thereby help in pattern selection from large test sets. In [23, 24], the authors utilized this
metric to obtain test patterns with high defect coverage. Recently, in [25], this metric
was utilized to evaluate LFSR reseeding for test data compression. We briefly discuss the
concepts of output deviation below; a complete overview is presented in [22,26].
Reliability: The reliability R of an n-input gate G is defined as a vector of 2n components
-
R = {r(00...00), r(00...01), r(00...10), ..., r(11...11)} (6.1)
Each component denotes the probability that G’s output is correct for the input combination
shown in the exponent. For instance, r(00) represents the probability that G’s output is
correct for the input combination 00 (assuming n = 2).

Maheshwar Chandrasekar Chapter 6. Diagnostic Test Generation 123
Probability: pG,v represents the probability of gate G to be at logic value v, where v ∈
{0, 1}. Note that pG,0+pG,1 = 1. Further, signal correlations due to reconvergent fanouts are
ignored. The following equations can be used to obtain the probability values of a 2-input
gate G (with inputs f and g).
p(G,c⊕i) = pf,cpg,cr(cc) + pf,cpg,cr
(cc)
+ pf,cpg,cr(cc) + pf,cpg,c(1 − r(cc))
p(G,c⊕i) = pf,cpg,c(1 − r(cc)) + pf,cpg,c(1 − r(cc))
+pf,cpg,c(1 − r(cc)) + pf,cpg,cr(cc) (6.3)
where c and i represents the controlling and inversion values of G. The above equations
intuitively model the probability of obtaining value v at the output of gate G. It is based
on the probability of values at inputs f and g together with the reliability measure that
the output at G is correct for the considered input combination. Note that the probability
values for complex gates can be similarly defined.
Deviation: The deviation δG,t at gate G for an input pattern t is the probability value pG,v,
where v is the correct output at G for the pattern t. Intuitively, δG,t represents a measure
of the likelihood that the output at G is erroneous for the pattern t.

Maheshwar Chandrasekar Chapter 6. Diagnostic Test Generation 124
6.3 Our Proposed Learning Framework
Since for diagnostic test generation, an ATPG engine is used, we first explain our learning
framework with respect to the base detection-oriented ATPG. Extension of this framework
to ADTG is straight-forward and will be discussed as well.
6.3.1 Success Driven Learning (SDL) based on Search State Ex-
tensibility
Consider the example shown in Figure 2.6. In Section 2.3.2, we showed how AT can be used
to determine a set R for the success state obtained for the fault G14 sa−1. After performing
AT for this success state, we record the current decision G34 = 0 in a set T . We know that
R ∪ T ⇒ G7,D203 . The pair {R, T} is recorded. The intuition behind this learning is that, in
future search, whenever R becomes extensible to the current search state (when targeting
other faults), its corresponding T may propagate the fault effect in R to a primary output.
After the {R, T} pair is learned, we backtrack to the highest decision level at which any
of the assignments in R is made. In the running example, since R = G5,D202 , we backtrack
to level 5 from level 7. Now, R represents an intermediate state and AT can be used to
determine the antecedents for this intermediate state. The new R returned by AT for this
intermediate state will be {G4,D201}. Again note that this new R together with its current
decision (G5,022 ) implies the intermediate state {G5,D
202}. Next, we update T with the current
decision; so T = {G34 = 0, G22 = 0}. Now, we continue to learn the pair {R, T} with the

Maheshwar Chandrasekar Chapter 6. Diagnostic Test Generation 125
new R and the updated T . We iterate this process of determining antecedents and learning
the {R, T} pair until a fault effect is present in the learned R.
Now, consider the partial decision tree for the fault G19 sa − 0 shown in Figure 2.6. Note
that R = {G201 = D} and T = {G34 = 0, G22 = 0} is a previously learned pair. It can
be seen that after the third decision, the learned R = {G201 = D} is implied. Further,
its corresponding T propagates the fault effect in R to the primary output G203. Thus our
learning helps to identify intermediate states R that have the potential to lead to a success
state when the assignments in its corresponding T are made. However, false positive cases
may occur and is explained with an example below.
Consider the example circuit and the partial PODEM-based [15] decision trees shown in
Figure 6.2. When the fault e stuck-at 1 is detected at output g (Figure 6.2B), we learn the
following two {R, T} pairs - {f = D}, {h = 1} and {e = D}, {h = 1, c = 0}. Now, when
targeting the fault d sa − 1 (Figure 6.2C), previously learned R = {e = D} is implied after
the second decision. However, it can be seen that it’s corresponding T = {h = 1, c = 0}
does not propagate the fault effect in R to the primary output. We call such cases as false
positive cases.
A close observation reveals that the current target fault site (d sa − 1) is in the path of
implications of signal values in T = {h = 1, c = 0}. Further, the current target fault site
reconverges with R = {e = D} at gate f . Thus, we do not get the required propagating
value at gate f for T to propagate the fault effect in R. Though such occurrences are rare, we
need to identify and avoid these false positives. We note that methods such as the EST that

Maheshwar Chandrasekar Chapter 6. Diagnostic Test Generation 126
Figure 6.2: False Positive in SDL
uses the complete evaluation frontier would avoid such false positives, but the conservative
nature would miss many of the search state extensibility opportunities. In other words, the
benefits gained from search state extensibility out-weighs the cost from the rare events of
false positives. To handle these false positives, we propose to perform a quick fault simulation
augmenting T with the current sequence of decisions (that implied R). If the target fault
is detected, then we proceed with the next fault. Otherwise, we proceed as usual from the
current sequence of decisions to determine a test. Further, it may be the case that T and
the current set of decisions (that implied R) may be inconsistent. In such cases, we override
the assignment in the current decision set with that in T for the false-positive check. The
motivation is that we know previously that T propagated the fault-effect in R to an output.
Further, the hope is that the overwritten assignment in the current decision set may not be
required to imply R. Since our learning is based on the extensibility of R with the current

Maheshwar Chandrasekar Chapter 6. Diagnostic Test Generation 127
search state, we call our learning as search state extensibility based learning.
6.3.2 Conflict Driven Learning (CDL) based on Search State Ex-
tensibility
Now, we explain our learning when a conflict state occurs during the search process. Similar
to the success case, we use AT to determine R that along with the current decision implied
the conflict. Consider a decision node N in the DT . Suppose the decision N = 0 implies a
conflict in the CUT (i.e) all paths from the fault-site are blocked; thus the fault-site cannot
be sensitized to an output. This conflict state is represented by the E-Frontier F obtained
after the current decision. Note that all assignments in F are Boolean-valued. Otherwise
D-frontier contains a potential gate that has an X-path to an output and our assumption
of N = 0 implying a conflict state would be wrong. Now, we perform AT to determine R
for the Boolean-valued assignments in F . Let us call this R as R0. Similarly, if conflict
occurs for N = 1 decision as well, then we perform AT to get the set R1. Now, we compute
and learn BR = {R0
⋃R1}.Also, we non-chronologically backtrack to the highest decision
level (l) at which any gate assignments in BR is made. Now the interpretation is that, in
future search (may be for the same target fault or a different fault), whenever BR becomes
extensible to the current search state, potentially no fault effect in BR can be propagated to
a primary output. Further, after backtracking to level l, we perform AT for the assignments
in BR and record the returned set R as R0 or R1 based on the decision at level l. If both

Maheshwar Chandrasekar Chapter 6. Diagnostic Test Generation 128
°±
² ³
´
µ
¶�·�¸º¹�»º¼©½C¾ ¿ÁÀÃÂAÄÆÅ(ÇCÂ È É#·#ÊÌË�»CÍQÎ ÀϷпÑË�»�ÍÒÎ
Ó
ÔÕ Õ
Ö×Ø
Ù
Ú
Û
Ü
Ý
Þß
Ó
ß
Õºà�áBâNã ä ÞIå
æ�ç�è"ç á ßÓ
é Ô�ê�ë�ì Ó�í�îï.à�ã ä ß ì Ó�í�ðÕ
Figure 6.3: Conflict Driven Learning
decisions were made at level l, then we learn a new BR = {R0
⋃R1} at level l and iterate the
aforementioned process. Otherwise, we decide on the remaining value for the input decided
at l and proceed with the search process. Finally, we stop our learning process, whenever
the backtrack level l is less than the level at which fault was excited. This allows us to learn
pervasive BR (i.e) the learned information can be used to determine redundant search states
in the future search process when targeting a different fault.
Consider Figure 6.3. For the fault b sa − 0 (Figure 6.3B), both the Boolean decisions on
primary input a implies a conflict state. For these two decisions, AT will return R0 = {d3,0}
and R1 = {e2,D, f 3,D}. Thus, the learned BR = {e = D, f = D, d = 0}. Now, consider the
scenario for fault e sa− 0 shown in Figure 6.3C. After the second decision, the BR (learned
for b sa−0) is extensible to the current search state. Note that none of the fault effects in the
current D-frontier can be propagated to the output l. Thus our learning aids in identifying

Maheshwar Chandrasekar Chapter 6. Diagnostic Test Generation 129
potential intermediate states that may always lead to a conflict state.
Similar to the rare false-positives in SDL, two types of false negative (also rarely occurring)
case may occur in the CDL.
1. Type 0: At the instant of learning BR, we know that any assignment on a subset of
primary inputs always leads the intermediate state BR to a conflict state. For instance,
in the above example (Figure 6.3B), we know that both decisions on input a yields a
conflict state when learning BR = {e = D, f = D, d = 0}. Without loss of generality,
let us consider one such assignment A on the subset of primary inputs. Suppose in a
future search, this BR becomes extensible to the current search state. Further, let the
current target fault lie in the path of implications of A. Then, for the assignment A, we
may not get the required implications that will block all the fault effects in BR. This
is analogous to not getting the propagating values in false positive case for SDL (refer
Section 6.3.1). In such cases, the current search state (with which BR is extensible
to) may not lead to a conflict state for the assignment A. Thus it may be wrong to
conclude that the current intermediate state will never lead to a success state - a false
negative case. Note that since the current target fault lies in the path of implications
of A, if we do not get the required implications to block the fault effects in BR for
the assignment A, then there must exist a gate in the current D-frontier that can be
reached from the fault site without traversing any gates in the BR. This information
can be used to perform false negative check and is described in the sequel.

Maheshwar Chandrasekar Chapter 6. Diagnostic Test Generation 130
ñò
ó
ô õö
÷�ø.ù�ú"û�üþý�ÿ ����� ����� � �9ø� ���û��� �Cø����û���
û
�
� ��
� �
û
������ ÿ � ���
!�"��#�!
�
$Cû%�&('�*)(+, ��ÿ � -'%�%)���
Figure 6.4: False Negative in CDL
2. Type 1: Whenever BR becomes extensible to the current search state, there might
be a fault effect other than that in the BR that may propagate to a primary output.
For example, consider Figure 6.4. For the fault d sa − 1, both the Boolean decisions
on input b yields a conflict state. Here, we learn that BR = {d = D}. Next, when we
target the fault b sa − 1 (Figure 6.4C), previously learned BR = {d = D} becomes
extensible to the search state obtained after the second decision. However, the fault
effect at the fault site (b) can still be propagated through the path b → f → g → h
(with input c = 1).
Thus, even though BR is extensible to the current search state we cannot immediately
conclude that the current search state will never lead to a success state. To detect the above
mentioned types of false negative cases, whenever the extensibility occurs, we traverse the
fanout cone of the target fault-site. If all fault effects at the inputs of gates in the current
D-frontier can be reached only after traversing through the assignments in BR, then it can

Maheshwar Chandrasekar Chapter 6. Diagnostic Test Generation 131
be safely concluded that the current intermediate search state will always lead to a conflict
state. Thus we can conclude that the current space is a conflict space and can backtrack
from it. For instance, consider the fault e sa − 0 example (Figure 6.3C) discussed above.
When BR = {e = D, f = D, d = 0} becomes extensible to the search state obtained after
second decision d = 0, none of the fault effects at the inputs of the current D-frontier (gates
g and k) can be reached without traversing through the gates in BR. Thus our method will
conclude that the current search state is a conflict state, which is indeed true since both the
decisions on input a will lead to a conflict state. Next, consider the fault b sa − 1 example
(Figure 6.4C) discussed above. When BR = {d = D} becomes extensible to the search
state implied after the second decision, the fault effects at the inputs of gates in the current
D-frontier (gates e and f 1.) can be reached from the fault site without traversing the gates
included in BR. Thus our method will not conclude that the current search state is a conflict
state. This is indeed true here since the fault effect can be observed at the output h (with
input c = 1). For our learning, we need to perform AT to determine the reason for the
conflicts identified by CDL. For this purpose, we determine the antecedents of BR since
BR represents such conflict states.
Finally, we describe two enhancements to the conflict learning. The first enhancement is for
the false-negative check. When we traverse the fault-site fanout cone, we may hit a gate g
in the D-frontier without traversing through any assignment in BR. However, we can still
conclude that the current space is a conflict space if there does not exist an X-path from g.
1d2,D is the first implication at level 2. Since we check for extensibility after each implication the gates e
and f will not be implied when the extensibility occurs

Maheshwar Chandrasekar Chapter 6. Diagnostic Test Generation 132
Note that for soundness, we need to append BR with the assignments that block the X-path
before performing AT for the assignments in BR. Second enhancement is to improve the
quality of BR learned. Let F be the E-frontier just before node N in the DT . Now we
define MG = F \ (R0
⋃R1). The insight is that irrespective of any value to gates in MG, no
fault effect in R0
⋃R1 can be propagated to an output. So the new BR = {R0
⋃R1
⋃MG},
where gates in MG appear in the X-literal (can assume any value) form. This enhancement
will help in the false-negative check since certain fault-effect at the inputs of gates in the
D-frontier may be reachable through gates in MG. Again, we note that the benefits gained
from search state extensibility out-weighs the cost from the rare events of false negatives.
6.3.3 Learning Framework for ADTG
In Section 2.2.3, we discussed the model that we use for generating a diagnostic pattern for
a given fault pair (f0, f1). Note that the diagnostic test generation problem was converted
into the select line S sa−0 (or equivalently S sa−1) problem. Thus the learning framework
that we proposed for the ATPG engine can be used for the diagnostic pattern generation
too. However, the learned search states, either in SDL or in CDL, must not include the
additional gates used to modify the original CUT’s netlist. This enables the learned search
states to be used across faults or fault-pairs during test generation. Further, we would like
to point out that our learning framework can be easily adopted for any ADTG engine since
it just succinctly records the visited search states and tries to prune them in future search.

Maheshwar Chandrasekar Chapter 6. Diagnostic Test Generation 133
Figure 6.5: Proposed ADTG Flow
6.3.4 Incremental Learning
Overall, we follow the same flow for ADTG as proposed in [7]. However, we incorporate the
learning framework discussed above in the ATPG engine. The information learned during
detection-oriented test generation of each fault can be used for subsequent faults. Similarly,
the search states that are learned during diagnostic-oriented test generation of each fault
pair can be used for subsequent fault pairs. Further, the search states that were learned
during detection-oriented test generation can be incrementally used during ADTG. This
again follows from the modeling of diagnostic test generation as detection test generation.
This flow is depicted in Figure 6.5.

Maheshwar Chandrasekar Chapter 6. Diagnostic Test Generation 134
6.4 Output Deviation based X-filling
The number of specified primary inputs in the test pattern returned by an ATPG tool is
often very less in comparison to the number of primary inputs. Traditionally, the unspecified
primary inputs in a returned test pattern have been filled (X-filling) with different objectives
- like to reduce test time and peak power during testing [27, 28], to enhance test data com-
pression [29] and to boost the performance of fault-dropping based ATPG tools by random
X-filling [19]. In this section, we propose an output deviation based X-filling method with
the objective of improving the diagnostic resolution of the detection-oriented test patterns.
For a test cube t returned by the ATPG tool, we randomly fill it to obtain te such that each
primary input in te is specified. Now, for each primary input I, we assign pI,v = 1 if the value
of I in te is v; otherwise pI,v = 0. Next, for each internal gate G and primary output O in
the CUT , the probability values pG/O,v, v ∈ {0, 1} are computed using Equation 6.2. From
these probability values, the output deviation δO,te for each output O in the CUT can be
computed. Now, we define the output deviation obtained for te as ODte =∑
foreachO δO,te .
Ideally, we would like to compute ODte for each te that can be obtained from t and pick the
te that has the maximum ODte value. However, the number of te for a given t is exponential
in the number of unspecified primary inputs in t. Thus, in our experiments, we randomly
choose up to 8 te patterns for a given t and pick the te, which has the maximum ODte value.
We discard the remaining 7 te patterns. Maximum ODte value intuitively implies that te is a
higher quality detection vector, which may help to detect more faults in the CUT . Further,

Maheshwar Chandrasekar Chapter 6. Diagnostic Test Generation 135
we consider the output deviation value at each of the primary output in selecting te. This in
turn may imply to detect each fault at as many outputs in the CUT as possible. Intuitively
this may aid in distinguishing fault-pairs since the faults in really distinguishable fault-pairs
do not always share the same output response. Thus by trying to detect each fault at as
many outputs as possible, our intuition is that the faults in an arbitrary distinguishable
fault-pair may yield different responses in at least one of the output.
6.5 Experimental Results
Table 6.1: Original Flow vs. Proposed Flow
Ckt #Flts. Det Red Abt Unres. Dist Equal Abt #CM #SM T (s) ATOM /E+06 E+06 ATOMCOM
s13207 7952 7903 48 1 1.47 1465941 418 2 8194 1.637952 7903 48 1 1.63 1632629 418 1 785 1.3 5033
s13207.1 7980 7932 47 1 1.03 1031479 437 9 5762 2.007980 7932 47 1 1.03 1031480 437 8 82 0.854 2876
s15850 9662 9548 114 0 1.28 1275493 557 0 7485 1.949662 9548 114 0 1.28 1275493 557 0 216 1 3855
s15850.1 9676 9565 111 0 1.42 1416573 557 0 8983 1.999676 9565 111 0 1.42 1416573 557 0 227 1.2 4518
s5378 3680 3663 17 0 0.09 93010 169 0 277 1.333680 3663 17 0 0.1 104087 169 0 0 0.09 208
s9234 4782 4729 53 0 0.67 669499 248 52 1760 1.604782 4729 53 0 0.59 593273 248 43 811 0.549 1098
s38417 26454 26413 41 0 10.5 10452822 779 440 131889 1.6526454 26413 41 0 11.7 11729057 779 414 6713 11 79855
s35932 26804 26804 0 0 0.03 27966 2742 0 4113 1.1326804 26804 0 0 0.03 27966 2742 0 0 0.01 3650
b14 1 11136 11133 1 2 2.67 2666730 334 2177 46797 0.8011136 11133 1 2 2.67 2667704 334 1203 6 2.4 58584

Maheshwar Chandrasekar Chapter 6. Diagnostic Test Generation 136
6.5.1 Incremental Learning Framework
We implemented the proposed learning framework based on search state extensibility on
top of a publicly available state-of-the-art ATPG tool ATOM [19]. In the sequel, we refer
this engine as ATOMCOM . We compared ATOM based on the original flow (Figure 6.1)
against ATOMCOM based on the proposed flow (Figure 6.5). The primary objective of this
experiment is to illustrate the effectiveness of the proposed flow and learning framework to
solve difficult fault pairs (faults). So during ATPG we targeted each single stuck-at fault in
the collapsed fault list individually to perform a thorough evaluation. Then we performed
diagnostic fault simulation to determine the fault pairs (from the the set of detected faults)
that are distinguishable by the test set (Tdet) returned by ATPG. Our diagnostic simulator
is based on the algorithm proposed in [20], which is one of the best simulators reported till
date. This simulator returns a set of equivalence classes containing faults, where none of
the fault pair in an equivalence class are distinguishable by Tdet. To avoid long diagnostic
simulation time, we used only the first 200 patterns from Tdet if its cardinality is greater than
200. After diagnostic simulation, we performed ADTG for each fault pair in each equivalence
class. We performed our experiments on full scan AND/INVERTER Graph [70] versions of
ISCAS89/ITC99 benchmark circuits. For all our experiments, we set the maximum backtrack
limit to 500.
The results for large benchmark circuits for ATOM and ATOMCOM are presented in Table
6.1. The first two columns report the circuit name and number of faults in the collapsed
fault list. For each circuit, the table shows two rows of data; the first row is for the original

Maheshwar Chandrasekar Chapter 6. Diagnostic Test Generation 137
ATOM and the second row is for ATOMCOM . Columns 3-5 report the number of detected,
redundant and aborted faults for the original ATPG run. Column 6 reports the number of
unresolved pairs after the diagnostic simulation of Tdet. Columns 7-9 show the number of
distinguished, equivalent and aborted fault pairs for the ADTG run. Columns 10-11 indicate
the number of conflict/success state match that occurred for ATOMCOM together for ATPG
and ADTG run. Column 12 reports the time taken (in seconds) for both ATPG and ADTG
runs. The final column shows the ratio of run time for ATOM over ATOMCOM .
From the last column in the Table 6.1, it can be seen that ATOMCOM outperforms ATOM
in the time taken in almost all runs. For instance, for s13207.1, we obtain a 2× speedup
over ATOM . Note that the number of fault-pairs targeted by the two methods may dif-
fer since the Tdet used by them for diagnostic simulation may be different. For s13207 and
s38417, we achieve a speed-up of 1.63× even though we target more fault pairs than ATOM .
The reported speedup is achievable due to the huge number of search state matches (after
false-positive and false-negative check) that occur for ATOMCOM . For b14 1, our method
suffers a 0.2× slow-down over ATOM . This is due to the overhead of our learning frame-
work. However, we were able to solve 974 more fault-pairs than ATOM within the allotted
backtrack limit of 500. This indicates the potential of the proposed learning framework to
prune redundant search spaces during the test generation flow. For s35932, because most
fault pairs were easily resolvable under the backtrack limit of 500, the speedup we achieved
with the proposed learning was smaller. It was a speedup nevertheless. Thus, for almost all
circuits, we achieve either a speedup or resolve more of the unresolved fault pairs, or both.

Maheshwar Chandrasekar Chapter 6. Diagnostic Test Generation 138
For both ATOM and ATOMCOM , we did not perform fault simulation during ATPG or
ADTG run since our objective was to show the effectiveness of the proposed flow and learning
framework. Also, in our implementation, we did not incorporate the multiple input assign-
ment and look-back technique in both ATOM and ATOMCOM . Note that this does not
invalidate our results since look-back mechanism tries to generate a test for a (detectable)
fault only after the maximum backtrack limit is reached for the regular search process. Since
the results reported for the two methods were obtained before exhausting the maximum
backtrack limit, the conclusions made above are still intact.
6.5.2 Output Deviation based X-filling
We implemented the proposed X-filling method in ATOM ATPG tool [19]. For each
detection-oriented test cube generated, we used the proposed output deviation based X-
filling to generate the completely specified test vector. We compared our X-filling method
against random X-filling method used in [19]. For the output deviation computation we de-
composed complex gates, if any, into sub-circuit consisting of simple NOT, 2-input (N)AND
and (N)OR gates. We considered the ISCAS85 and full-scan versions of ITC99 circuits for
this experiment. The results are summarized in Table 6.2. The first column indicates the
CUT . For each CUT , the table shows two rows of data - the first row is for the random
X-filling and the second row is for our output deviation based X-filling. The second and
third columns show the number of faults in the collapsed fault-list and the total number of
fault-pairs considered for diagnostic simulation respectively. The fourth column shows the

Maheshwar Chandrasekar Chapter 6. Diagnostic Test Generation 139
number of pairs that cannot be resolved by the fully specified ATPG generated patterns -
these pairs require dedicated ADTG engine. The last column indicates the number of addi-
tional fault-pairs that can be resolved by the ATPG patterns filled by our output deviation
based X-filling method.
Table 6.2: Output Deviation based X-fill vs. Random X-fill
Ckt. #Flts Pairs Unresolved Difference
c6288 7744 2.97E+07 1083 457744 2.97E+07 1038
c1355 1574 1.23E+06 779 141574 1.23E+06 765
b14 22802 2.56E+08 2850 8722802 2.56E+08 2763
b15 1 28999 4.15E+08 4481 3428999 4.15E+08 4447
b20 1 33255 5.47E+08 3831 3933255 5.47E+08 3792
b20 45459 1.02E+09 6097 19745459 1.02E+09 5900
b21 1 32948 5.37E+08 3846 6832948 5.37E+08 3778
b21 46154 1.05E+09 6221 3646154 1.05E+09 6185
b22 1 49945 1.23E+09 5614 3949945 1.23E+09 5575
For the circuit b20, we were able to resolve 197 more fault-pairs than the random X-fill
method. On an average, the proposed X-fill method is able to resolve 62 more fault pairs than
the random X-fill method in the results reported in Table 6.2. In the considered benchmarks,
random X-filling also helps in resolving almost 99% of the total fault pairs. This is because

Maheshwar Chandrasekar Chapter 6. Diagnostic Test Generation 140
the number of hard-to-distinguish fault-pairs are usually small in comparison with the total
number of fault-pairs in the CUT . However, note that for each additional fault-pair, the
ADTG engine may have to search a space that is exponential in the number of primary
inputs in the worst case. Thus, even a marginal increase in the number of resolved pairs may
substantially reduce the burden on the subsequent ADTG engine, which is often desired!
Overall, the results obtained indicate that the output deviation based X-filling technique has
the potential to distinguish more fault-pairs than the random X-filling method.
6.6 Chapter Summary
In conclusion, we have proposed a learning framework based on a new concept of search
state extensibility. Further, we proposed an incremental use of the information learned
during detection-oriented test generation in ADTG. This carry-over of learning is quite
interesting and further motivates us to investigate useful information that can be learned
during detection-oriented test generation for use in ADTG. Experimental results indicate
that our incremental learning framework achieves up to 2× speed-up and/or resolves more
initially unresolved fault pairs for each tested circuit. Finally, we proposed an X-filling
method based on output deviation measure to enhance the number of pairs that can be
resolved by detection-oriented test patterns. For b20 circuit, our X-filling method could
resolve 197 more pairs than the random X-fill method.
In recent years, the semiconductor industry is not only interested in conventional test pat-

Maheshwar Chandrasekar Chapter 6. Diagnostic Test Generation 141
terns but also has an increasing interest in diagnostic test patterns. The main reason for
such interest is that these patterns can potentially help them improve the yield drastically.
An intelligent test generation engine that can offer both detection and diagnostic ability
can dramatically reduce the turn-around time and associated cost in silicon diagnosis. We
believe that the proposed investigation can serve as a promising stepping stone for the design
of such an intelligent engine.

Chapter 7
Conclusion
In today’s world, the core solving process of any Design Verification or Test Generation
problem is based on the branch-and-bound procedure. For practical purposes, aggressive
learning mechanisms are necessary to quickly solve such resource intensive, inherently hard
problems. In this dissertation, we proposed an interesting extensibility relation among search
states visited during the branch-and-bound search. We synergistically combined this novel
relation with antecedent tracing technique to design a powerful learning framework for proce-
dures based on branch-and-bound search. Further, we fine tuned this learning framework for
distinct applications in Design Verification and Test Generation like preimage computation,
abstraction refinement based model checking and diagnostic test generation.
Initially, we introduced our search state extensibility based learning framework with respect
to preimage computation, which is the core step of any Model Checking technique. We proved
142

Maheshwar Chandrasekar Chapter 7. Conclusion 143
that our learning framework for preimage computation is sound and complete. We proposed
a probability based heuristic to guide antecedent tracing in our learning framework. Further,
we showed that our framework can be easily used to compute over-approximate preimage
space, which may be of interest for certain verification problems like pre-silicon debugging.
Next, we presented our image extraction technique with bounded model checking to compute
an upper approximation of the image space. We illustrated that our extensibility based
learning framework elegantly fits in this approach with subtle fine tuning for computing
over-approximate image space. Further, we proved that the computed over-approximate
space are indeed interpolants and designed a counter-example guided abstraction refinement
framework for Model Checking using our novel image extraction technique.
Next, fault collapsing is an integral pre-processor of today’s commercial test generation pack-
ages since it has a direct impact on test economics. We proposed a low-cost fault collapsing
engine based on our extensibility relationship between search states. Unique requirements
to test a fault were used for this purpose; we also proposed an efficient storage technique
for these unique requirements to significantly reduce the memory footprint. Further, we
also proved a lower bound on the size of a collapsed fault list from theoretical point of in-
terest. Later, we proposed a multi-valued ATPG framework to solve the test generation
problem directly in its multi-valued domain. We also integrated powerful learning technique
for sensitization conflicts in this multi-valued framework.
Finally, during silicon diagnosis, diagnostic test patterns are required for distinguishing fault
pairs in the candidate list. Such pairs are usually hard-to distinguish or hard-to prove

Maheshwar Chandrasekar Chapter 7. Conclusion 144
equivalent pairs. So we customized our search state extensibility based learning framework
for diagnostic test generation. We also proposed an incremental learning framework to utilize
the information learned during detection-oriented test generation in diagnostic-oriented test
generation. Lastly, we also proposed an output-deviation based probabilistic metric to X-fill
generated test patterns with the objective of enhancing the diagnostic resolution of such
patterns.
Overall, we proposed a generic search state extensibility based learning framework for branch-
and-bound search procedures; which was later customized based on the target application.
In general, our framework aided in identifying non-trivial redundant search states providing
for significant pruning of redundant search spaces. We explained the applicability of this
framework for Model Checking and Test Generation problems. Further, in future, our frame-
work can be utilized with fine tuning for problems, like design debugging, that are currently
solved using branch-and-bound search procedures.

Bibliography
[1] E. J. Marinissen and N. Nicolici, “Editorial: Silicon Debug and Diagnosis,” IET Com-
puters and Digital Techniques, vol. 1, no. 6, pp. 659-660, Nov. 2007
[2] L-T. Wang et al., “VLSI Test Principles and Architectures,” Morgan Kaufmann Pub-
lishers, 2006
[3] M. Bushnell and V. D. Agrawal, “Essentials of Electronic Testing for Digital, Memory
& Mixed-Signal VLSI Circuits,” Boston, MA, Kluwer Academic Publishers, Kluwer,
2000
[4] J. P. Roth, “Diagnosis of automata failures: a calculus and a method,” IBM J. R&D,
vol. 10, no. 4, 1966, pp. 278-291
[5] J. P. Roth et al., “Programmed Algorithms to Compute Tests To Detect and Distin-
guish Between Failures,” IEEE Transactions on Electronic Computers, vol. EC-16, no.
5, Oct. 1967, pp. 567-580
145

Maheshwar Chandrasekar Bibliography 146
[6] J. Savir and J. P. Roth, “Testing For, and Distinguishing Between Failures,” 12th Fault
Tolerant Computing Symposium, June 1982, pp. 165-172
[7] P. Camurati et al., “Diagnosis Oriented Test Pattern Generation,” European Design
Automation Conference, 1990
[8] P. Camurati et al., “ A diagnostic test pattern generation algorithm,” International
Test Conference, 1990, pp. 52-58
[9] T. Gruning et al., “DIATEST: A Fast Diagnostic Test Pattern Generator for Combi-
national Circuits,” International Conference on Computer-Aided Design, 1991
[10] I. Hartanto et al., “Diagnostic Test Pattern Generation for Sequential Circuits,” VLSI
Test Symposium, 1997
[11] S. M. Reddy et al., “Diagnostic Test Generation for Synchronous Sequential Circuits
based on Test Elimination,” International Test Conference, 1998
[12] I. Pomeranz et al., “Diagnostic Test Generation for Combinational Circuits based on
Test Elimination,” Asian Test Symposium, 1998
[13] S. M. Reddy et al., “z-Diagnosis: Framework for Diagnostic Fault Simulation and
Test Generation Utilizing Subsets of Outputs,” IEEE Transactions on Computer-Aided
Design of Integrated Circuits and Systems, 2007
[14] I. Hartanto et al., “Diagnostic Fault Equivalence Identification using Redundancy In-
formation and Structural Analysis,” International Test Conference, 1996

Maheshwar Chandrasekar Bibliography 147
[15] P. Goel, “An Implicit Enumeration Algorithm to Generate Tests for Combinational
Logic Circuits”, IEEE Transactions on Computers, vol. C-30, no. 3, March 1981
[16] J. Silva and K. A. Sakallah, “Dynamic Search-Space Pruning Techniques in Path Sen-
sitization”, Proceedings of Design Automation Conference, June 1994, pp. 705-711.
[17] J. P. Marques-Silva and K. A. Sakallah, “GRASP: A search algorithm for propositional
SAT”, IEEE Transactions on Computers, May 1999
[18] M. Moskewicz et al., “CHAFF: Engineering an efficient SAT solver,” Design Automa-
tion Conference 2001
[19] I. Hamzaoglu et al., “New Techniques for Deterministic Test Pattern Generation,”
VLSI Test Symposium 1998
[20] S. Venkataraman et al., “Rapid Diagnostic Fault Simulation of Stuck-at Faults in
Sequential Circuits using Compact Lists,” Design Automation Conference 1995
[21] A. Kuehlmann et al., “Robust Boolean Reasoning for Equivalence Checking and Func-
tional Property Verification”, IEEE Transactions on Computer-Aided Design of Inte-
grated Circuits and Systems, vol. 21, no. 12, 2002
[22] Z. Wang, K. Chakrabarty and M. Goessel, “Test Set Enrichment using a Probabilistic
Fault Model and the Theory of Output Deviations,” Design, Automation and Test In
Europe, 2006, pp 1-6

Maheshwar Chandrasekar Bibliography 148
[23] Z. Wang and K. Chakrabarty, “An Efficient Test Pattern Selection Method for Improv-
ing Defect Coverage with Reduced Test Data Volume and Test Application Time,”
Asian Test Symposium, 2006, pp 333-338
[24] X. Kavousianos and K. Chakrabarty, “Generation of compact test sets with high defect
coverage,” Design, Automation and Test In Europe, 2009, pp 1130-1135
[25] Z. Wang, H. Fang, K. Chakrabarty and M. Bienek, “Deviation-Based LFSR Reseed-
ing for Test-Data Compression,” IEEE Transactions on Computer-Aided Design of
Integrated Circuits and Systems, vol. 28, no. 2, Feb. 2009, pp 259-271
[26] Z. Wang and K. Chakrabarty, “Test-Quality/Cost Optimization Using Output-
Deviation-Based Reordering of Test Patterns,” IEEE Transactions on Computer-Aided
Design of Integrated Circuits and Systems, vol. 27, no. 2, Feb. 2008, pp 352-365
[27] C-W. Tzeng and S-Y. Huang, “QC-Fill: An X-Fill method for quick-and-cool scan
test,” Design, Automation and Test In Europe, 2009, pp 1142-1147
[28] N. Badereddine et al., “Minimizing peak power consumption during scan testing: test
pattern modification with X filling heuristics,” Design and Test of Integrated Systems
in Nanoscale Technology, 2006, pp 359-364
[29] J. Li, X. Liu, Y. Zhang, Y. Hu, X. Li and Q. Xu, “On capture power-aware test
data compression for scan-based testing,” International Conference on Computer-Aided
Design, 2008, pp 67-72

Maheshwar Chandrasekar Bibliography 149
[30] R. Rudell, “Dynamic Variable Ordering for ordered binary decision diagrams”, Inter-
national Conference on Computer-Aided Design, Nov. 1994, pp. 42-47.
[31] S. Panda, F. Somenzi and B. F. Plessier, “Symmetric detection and dynamic variable
ordering of Decision Diagrams”, International Conference on Computer-Aided Design
1994, pp. 628-631.
[32] C. Meinel and C. Stangier, “Speeding up Symbolic Model Checking by accelerating
dynamic variable ordering”, GLSVLSI, 2000, pp. 39-42.
[33] A. Narayan, J. Jain, M. Fujita, and A. Sangiovanni-Vincentelli, “Partitioned ROBDDs:
A compact, canonical and efficiently manipulable representation for boolean functions”,
International Conference on Computer-Aided Design, Nov. 1996, pp. 547-554.
[34] I. H. Moon, H. H. Kukula, K. Ravi and F. Somenzi, “To Split or to conjoin: The
question in image computation”, Design Automation Conference, 2000, pp. 23-28.
[35] M. Chandrasekar and M. S. Hsiao, “A Novel Learning Framework for State Space
Exploration based on Search State Extensibility Relation,” submitted to VLSI Design,
2011
[36] M. Chandrasekar and M. S. Hsiao, “Search State Compatibility and Learning for State
Space Exploration,” SRC TECHCON, Austin, 2009
[37] M. Chandrasekar and M. S. Hsiao, “Minimum Search State based Learning: An Effi-
cient Preimage Computation Technique,” SRC TECHCON, Austin, 2008

Maheshwar Chandrasekar Bibliography 150
[38] S. Sheng and M. S. Hsiao, “Efficient pre-image computation using a novel success-
driven ATPG”, Design, Automation and Test In Europe, Sep. 2003, pp. 822-827.
[39] L. Zhang, C. Madigan, M. Moskewicz and S. Malik, “Efficient Conflict Driven Learning
in Boolean SAT”, International Conference on Computer-Aided Design, 2001, pp. 279-
285.
[40] P. A. Abdulla, P. Bjesse and N. Een, “Symbolic Reachability Analysis based on SAT
Solvers”, TACAS, 2000, pp. 411-425.
[41] P. Williams, A. Biere, E. M. Clarke and A. Gupta, “Combining Decision Diagrams
and SAT Procedures for Efficient Symbolic Model Checking”, Proc. CAV, 2000, pp.
124-138.
[42] K.McMillan, “Applying SAT Methods in Unbounded Model Checking”, CAV 2002,
pp. 250-264.
[43] H. Kang and I. C. Park, “SAT-based Unbounded Symbolic Model Checking”, Design
Automation Conference 2003, pp. 840-843.
[44] M. Ganai, A. Gupta and P. Ashar, “Efficient SAT-based Unbounded Symbolic Model
Checking using Circuit Cofactoring”, International Conference on Computer-Aided
Design, 2004, pp. 510-517.
[45] K. Chandrasekar and M. S. Hsiao, “Implicit Search-Space Aware Cofactor Expansion:
A Novel Preimage Computation Technique”, ICCD, Oct. 2006.

Maheshwar Chandrasekar Bibliography 151
[46] J. Silva et al.“Dynamic Search-Space Pruning Techniques in Path Sensitization”, Proc.
DAC, June 1994, pp. 705-711.
[47] K. Chandrasekar and M. S. Hsiao, “State Set Management for SAT based Preimage
Computation”, Proc. ICCD, 2005, pp. 585-590.
[48] M. Abramovici, M. A. Breuer and A. D. Friedman, “Digital Systems Testing and
Testable Design”, IEEE Press, NJ, 1990.
[49] M. H. Schulz, E. Trischler and T. M. Sarfert, “SOCRATES: A Highly Efficient Auto-
matic Test Pattern Generation System”, IEEE TCAD, Vol.7, No.1, 1988, pp. 126-137.
[50] J. Giraldi and M. L. Bushnell, “EST: The New Frontier in ATPG”, Design Automation
Conference, 1991, pp. 667-672.
[51] X. Chen and M. L. Bushnell, “Generalization of search state equivalence for automatic
test pattern generation”, Proc. VLSI Design, Jan. 1995, pp. 99-103.
[52] J. Giraldi and M. L. Bushnell. “Search State Equivalence for Redundancy Identification
and Test Generation”, Proc. ITC, Oct. 1991, pp. 184-193
[53] T. Larrabee, “Test pattern generation using Boolean Satisfiability”, IEEE TCAD, vol.
11, no. 1, Jan. 1992, pp. 4-15
[54] P. Stephan, R. K. Brayton, A. L. Sangiovanni-Vincentelli, “Combinational test gener-
ation using satisfiability”, IEEE TCAD, vol. 15, no. 9, Sep. 1996, pp. 1167-1176

Maheshwar Chandrasekar Bibliography 152
[55] E. Gizdarski, H. Fujiwara, “SPIRIT: A Highly Robust Combinational Test Generation
Algorithm”, IEEE TCAD, vol. 21, no. 12, Dec. 2002, pp. 1446-1458
[56] S. T. Chakradhar, V. D. Agrawal, and S. G. Rothweiler “A Transitive Closure Algo-
rithm for Test Generation”, IEEE TCAD, vol. 12, no. 7, July 1993, pp. 1015-1028
[57] L. Guerra e Silva, L. M. Silveira, and J. Marques-Silva, “Algorithms for solving Boolean
Satisfiability in Combinational Circuits”, Proc. DATE, March 1999, pp. 526-530
[58] M. Chandrasekar and M. S. Hsiao, “Efficient Search Space Pruning for multi-valued
SAT based ATPG,” IEEE European Test Symposium, 2007
[59] C. Liu, A. Kuehlmann, M. W. Moskewicz, “CAMA: A Multi-Valued Satisfiability
Solver”, Proc. ICCAD, Nov. 2003, pp. 326-333
[60] R. S. Wei and A. Sangiovanni-Vincentelli, “PROTEUS: A Logic Verification System
for Combinational Circuits”, ITC, Oct. 1986, pp. 350-359
[61] K. Chandrasekar and M. S. Hsiao, “Decision Selection and Learning for an ’All Solu-
tions ATPG Engine’”, Proc. ITC, Oct. 2004, pp. 607-616
[62] ABC:“http://www.eecs.berkeley.edu/ alanmi/abc/”
[63] “VIS Home Page. http://embedded.eecs.berkeley.edu/Respep/Research/vis/”
[64] P. Tafertshofer, A. Ganz and K. J. Antreich, “IGRAINE-an Implication GRaph-bAsed
engINE for fast implication, justification, and propagation”, IEEE TCAD, vol. 19, no.
8, Aug. 2000, pp. 907-927

Maheshwar Chandrasekar Bibliography 153
[65] T. Kirkland and M. R. Mercer, “A Topological Search Algorithm for ATPG”, Proc.
DAC, June 1987, pp. 502-508
[66] T. Fujino and H. Fujiwara, “An efficient test generation algorithm based on search
state dominance”, Proc. FTCS, July 1992, pp. 246-253
[67] W. Kunz and D. K. Pradhan, “Recursive Learning: A New Implication Technique for
Efficient Solutions to CAD Problems - Test, Verification, and Optimization”, IEEE
TCAD, vol. 13, no. 9, Sep. 1994, pp. 1143-1158
[68] B. Li, M. S. Hsiao and S. Sheng, “A Novel SAT All-Solutions Solver for Efficient
Preimage Computation”, Design, Automation and Test in Europe, Feb. 2004, pp. 272-
277
[69] K. Chandrasekar and M. S. Hsiao, “ATPG-based pre-image computation: efficient
search space pruning with ZBDD”, HLDVT, 2003, pp. 117-122
[70] A. Kuehlmann et al., “Robust Boolean Reasoning for Equivalence Checking and Func-
tional Property Verification”, IEEE TCAD, vol. 21, no. 12, 2002
[71] A. Gupta et al., “SAT-based image computation with applications in reachability anal-
ysis,” FMCAD, 2000
[72] M. Sipser, “Introduction to the Theory of Computation,” Second Edition, February
2005, pp. 1377-1394

Maheshwar Chandrasekar Bibliography 154
[73] H. Jin et al, “Strong conflict analysis for propositional SAT,” Design, Automation and
Test in Europe, 2006
[74] K. McMillan, “Symbolic Model Checking,” Kluwer Academic, 1993
[75] A. Biere et al,“Symbolic Model Checking using SAT Instead of BDDs,” Design Au-
tomation Conference, 1999
[76] F. Brglez and H. Fujiwara, “A Neutral Netlist of 10 Comb. Benchmark Designs and a
Special Translator in Fortran,” in International Symposium on Circuits and Systems,
1985, pp. 695-698
[77] F. Brglez, D. Bryan, and K. Kozminski, “Combinational Profiles of Sequential Bench-
mark Circuits”, International Symposium on Circuits and Systems, May 1989, pp.
1929-1934.
[78] F. Corno M. Sonza Reorda and G. Squillero, “RT-Level ITC 99 Benchmarks and First
ATPG Results,” IEEE Design and Test of Computers, July-August 2000, pp. 44-53.
[79] “Temporal Induction Prover Home Page. http://een.se/niklas/Tip/”
[80] M. Chandrasekar and M. S. Hsiao, “Tight Image Extraction for Unbounded Model
Checking,” submitted to DATE, 2011
[81] E. Clarke, O. Grumberg, S. Jha, Y. Lu and H. Veith, “Counter-Example Guided
Abstraction Refinement,” Lecture Notes in Computer Science, vol. 1855, 2000, pp.
154-169

Maheshwar Chandrasekar Bibliography 155
[82] E. Clarke, O. Grumberg, S. Jha, Y. Lu and H. Veith, “Counter-Example Guided
Abstraction Refinement for Symbolic Model Checking,” Journal of the ACM, vol. 50,
no. 5, September 2003, pp. 752-794
[83] R. Chadha and M. Viswanathan, “A Counterexample Guided Abstraction-Refinement
Framework for Markov Decision Processes,” to appear in ACM Transactions on Com-
putation Logic
[84] T. E. Hart, K. Ku, A. Gurfinkel, M. Chechik and D. Lie, “Augmenting
Counterexample-Guided Abstraction Refinement with Proof Templates,” IEEE/ACM
International Conference on Automated Software Engineering, 2008, pp. 387-390
[85] P. Bjesse and J. Kukula, “Using Counter Example Guided Abstraction Refinement to
Find Complex Bugs,” Design, Automation and Test in Europe, 2004
[86] W. Craig, “Linear reasoning: A new form of the Herbrand-Gentzen theorem,” Journal
of Symbolic Logic, vol. 22, no. 3, pp. 250-268, 1957
[87] K. L. McMillan, “Interpolation and SAT-based Model Checking,” International Con-
ference on Computer-Aided Verification, 2003, pp. 1-13
[88] K. L. McMillan, “Applications of Craig Interpolants in Model Checking,” TACAS,
2005, pp. 1-12

Maheshwar Chandrasekar Bibliography 156
[89] M. Sheeran, S. Singh and G. Stalmarck, “Safety Properties Using Induction and SAT
Solver,” In Proceedings of Formal Methods in Computer-Aided Design, vol. 1954 of
LNCS, pp. 108-125, 2000
[90] G. Cabodi, S. Nocco, M. Murciano and S. Quer, “Stepping Forward With Inter-
polant in Unbounded Model Checking,” In Proceedings of International Conference
on Computer-Aided Design, Nov. 2006
[91] G. Cabodi, P. Camurati and M. Murciano, “Automated Abstraction by Incremen-
tal Refinement in Interpolant-based Model Checking,” In Proceedings of International
Conference on Computer-Aided Design, 2008
[92] B. Keng and A. Veneris, “Scaling VLSI Design Debugging with Interpolation,” Formal
Method in Computer-Aided Design, 2009
[93] A. Smith, A. Veneris, M. F. Ali and A. Viglas, “Fault diagnosis and logic debugging
using Boolean Satisfiability,” IEEE Transactions on Computer Aided Design, vol. 24,
no. 10, pp. 1606-1621, 2005
[94] M. H. Liffiton and K. A. Sakallah, “Algorithms for computing minimal unsatisfiable
subsets of constraints,” Journal of Automated Reasoning, vol. 40, no. 1, pp. 1-33, 2008
[95] N. Een and N. Sorensson, “An extensible SAT-solver,” In International Conference on
Theory and Applications of Satisfiability Testing, pp. 502-518 2003
[96] http://fmv.jku.at/picosat/

Maheshwar Chandrasekar Bibliography 157
[97] M. Davis, G. Logemann and D. Loveland, “A Machine Program for Theorem-proving,”
Communications of the ACM, vol. 5, no. 7, pp. 394-397, 1962
[98] M. K. Ganai and A. Gupta “SAT-Based Scalable Formal Verification Solutions,”
Springer US Publisher, 2007
[99] E. Clarke, O. Grumberg and D. Peled, “Model Checking,” MIT Press, 2000
[100] E. Clarke, S. Jha, Y. Lu and D. Wang, “Exploiting symmetry in temporal logic model
checking,” Formal Methods in System Design, vol. 9, no. 1-2, pp. 41-76, 1996
[101] K. Jensen, “Condensed state spaces for symmetrical colored petri nets,” Formal Meth-
ods in System Design, vol. 9, no. 1-2, pp. 7-40, 1996
[102] E. Emerson and A. Sistla “Symmetry and Model Checking,” Formal Methods in System
Design, vol. 9, no. 1-2, pp. 105-130, 1996
[103] C. Ip and D. Dill, “Better Verification through Symmetry,” Formal Methods in System
Design, vol. 9, no. 1-2, pp. 41-75, 1996
[104] E. Emerson and R. Trefler “From asymmetry to full symmetry: New techniques for
symmetry reduction in Model Checking,” Correct Hardware Design and Verification
Methods, Lecture Notes In Computer Science, vol. 1703, Springer-Verilag, pp. 142-156,
1999

Maheshwar Chandrasekar Bibliography 158
[105] D. Peled, “All from one, one from all: On Model Checking using Representatives,”
In Proceedings of the 5th International Conference on Computer Aided Verification,
Lecture Notes in Computer Science, vol. 697, Springer-Verilag, pp. 409-423, 1993
[106] P. Godefroid, D. Peled and M. Staskauskas, “Using partial order methods in the formal
verification of industrial concurrent programs,” In Proceedings of the International
Symposium on Software Testing and Analysis, pp. 261-269, 1996
[107] P. Cousot and R. Cousot, “Abstract interpretation: A unified lattice model for static
analysis of programs by construction or approximation of fix-points,” In Proceedings
of the ACM Symposium of Programming Language, pp. 238-252, 1977
[108] D. E. Long, “Model Checking, abstraction and compositional verification,” PhD Dis-
sertation, School of Computer Science, Carnegie Mellon University, CMU-CS-93-178,
1993
[109] E. M. Clarke, O. Grumberg and D. E. Long, “Model Checking and Abstraction,” ACM
Transactions on Programming Languages and Systems, vol. 16, no. 5, pp. 1512-1542,
September 1994
[110] S. Graf and H. Saidi, “Construction of abstract state graphs with PVS,” In Proceedings
of Computer Aided Verification, 1997
[111] E. M. Clarke, O. Grumberg, S. Jha, Y. Lu and H. Veith, “Progress on the state
explosion problem in Model Checking,” In Informatics, 10 Years Back, 10 Years Ahead,
Lecture Notes in Computer Science, vol. 2000, Springer-Verilag, pp. 176-194, 2001

Maheshwar Chandrasekar Bibliography 159
[112] A. Biere, M. R. Prasad and A. Gupta, “A Survey of Recent Advances in SAT-based
Verification,” In International Journal on Software Tools for Technology Transfer, vol.
7, no. 2, pp. 156-173, April 2005
[113] K. Chandrasekar, “Search-space aware learning techniques for unbounded model check-
ing and path delay testing,” PhD dissertation, Bradley Department of Electrical and
Computer Engineering, Virginia Tech, April 2006
[114] E. J. McCluskey and F. W. Clegg, “Fault Equiv. in Combinational Logic Networks,”
IEEE Trans. on Comp., vol. C-20, no. 11, 1971
[115] A. Lioy, “Looking for Functional Fault Equivalence,” ITC, Oct. 1991
[116] T. Gruning et al., “DIATEST: A Fast Diagnostic Test Pattern Generator for Combi-
national Circuits,” Int Conf. on CAD, 1991
[117] I. Hartanto et al., “Diagnostic Fault Equiv. Identification using Redundancy Informa-
tion & Structural Anal.,” Int Test Conf., 1996
[118] A. Veneris R. Chang, M. S. Abadir and M. Amiri, “Fault Equiv. & Diagnostic Test
Generation Using ATPG,” IEEE International Symposium on Circuits and Systems,
May 2004, pp. 221-224
[119] A. Lioy, “Advanced Fault Collapsing,” IEEE Design and Test of Computers, vol. 42,
no. 3, Mar. 1993, pp. 268-271

Maheshwar Chandrasekar Bibliography 160
[120] A. V. S. S. Prasad et al., “New Algorithm for Global Fault Collapsing into Equiv. &
Dominance Sets,” Int Test Conf., 2002
[121] V. D. Agrawal et al., “Fault Collapsing via Functional Dominance,” International Test
Conference, 2003, pp. 274-280
[122] R. K. K. R. Sandireddy and V. D. Agrawal, “Diagnostic and detection fault collapsing
for multiple output circuits,” DATE, 2005
[123] M. Chandrasekar and M. S. Hsiao, “Fault Collapsing using a Novel Extensibility Re-
lation,” submitted to VLSI Design, 2011
[124] V. C. Vimjam and M. S. Hsiao, “Efficient Fault Collapsing via Generalized Dominance
Relations,” VLSI Test Symposium, 2006
[125] A. S. Doshi and V. D. Agrawal, “Independence Fault Collapsing,” VLSI Design and
Test Symposium, August 2005, pp. 357-364
[126] A. S. Doshi, “Independence Fault Collapsing and Concurrent Test Generation,” Thesis
(MS), Department of ECE, Auburn University, Auburn, Alabama, USA, 2005
[127] M. Chandrasekar and M. S. Hsiao, “Diagnostic Test Generation for Silicon Diagnosis
with an Incremental Learning Framework based on Search State Compatibility,” IEEE
High Level Design Validation and Test Workshop, 2009
[128] M. Chandrasekar, N. P. Rahagude and M. S. Hsiao, “Search state compatibility based
incremental learning framework and output deviation based X-filling for diagnostic

Maheshwar Chandrasekar Bibliography 161
test generation,” Journal of Electronic Testing: Theory and Applications, vol. 26, no.
2, pp. 165-176, April 2010
[129] W-T. Cheng, “Split Circuit Model for Test Generation,” In Proceedings of 25th IEEE
Design Automation Conference, pp. 96-101, 1988
[130] K. To, “Fault Folding for Irredundant & Redundant Combinational Circuits,” IEEE
Transactions on Computers, vol. C-22, no. 11, Nov. 1973, pp. 1008-1015
[131] Y. W. Ng and A. Avizienis, “Comments on Fault Folding for Irredundant and Re-
dundant Combinational Circuits,” IEEE Transactions on Computers, vol. C-25, no. 2,
1976, pp. 207-207
[132] M. Abramovici, D. T. Miller and R. K. Roy, “Dynamic Redundancy Identification in
Automatic Test Generation,” IEEE Transactions on CAD, vol. 11, no. 3, Mar. 1992,
pp. 404-407
[133] A. Lioy, “On the Equivalence of Fanout-Point Faults,” IEEE Transactions on Com-
puters, vol. 42, no. 3, Mar. 1993, pp. 268-271
[134] M. Nadjarbashi, Z. Navabi and M. R. Movahedin, “Line Oriented Structural Equiva-
lence Fault Collapsing,” IEEE Workshop on Model and Test, 2000
[135] R. Hahn, R. Krieger and B. Becker, “A Hierarchical Approach to Fault Collapsing,”
European Design and Test Conference, 1994, pp. 171-176

Maheshwar Chandrasekar Bibliography 162
[136] M. A. Iyer and M. Abramovici, “FIRE:Fault Independent Combinational Redundancy
Algorithm,” IEEE Transactions on VLSI Systems, vol. 4, June 1996, pp. 295-301
[137] Q. Peng, M. Abramovici and J. Savir, “MUST:MUltiple STem Analysis for identifying
sequentially untestable faults, ” Int Test Conf., 2000, pp. 839-846
[138] B. Krishnamurthy and S. B. Akers, “On the Complexity of Estimating size of a Test
Set,” IEEE Trans. on Comp., vol. C-33, Aug. 1984, pp. 750-753
[139] H. Fujiwara and S. Toida, “The complexity of fault detection problems for combina-
tional logic circuits”, IEEE TC, June 1982, pp. 555-560.