Embed Size (px)
Citation preview

1
SCU Measurements at LBNL
Diego Arbelaez (LBNL)
Superconducting Undulator R&D Review
Jan. 31, 2014

SCU R&D Review, Jan. 31, 2014
Introduction
Undulators must meet the trajectory and phase shake error requirements for the FELMagnetic field error sources
Random and systematic machining errors Assembly errors
Accurate fabrication methods will be used in order to minimize the initial device errorsEnd and central tuning methods will be incorporated on the prototypesSufficiently accurate measurement and tuning methods must be available to meet the requirements for:
1st and 2nd field integral Phase and phase shake Keff

3
Error Sources and Analysis

SCU R&D Review, Jan. 31, 2014
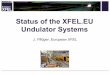
Error Analysis for Coil and Pole Tolerances
Coil error Produces no net kick (displacement does not grow with
distance) Produces a phase error
Pole error Produces a net kick (displacement grows with distance)
Second Field Integral Error (Pole)
100 μm errors
I1
I1 = 0.19 T-mm
I1 = 0.047 T-mm
100 μm errors
Second Field Integral Error (Coil)
δ = 0.21 T-mm2
δ = 0.94 T-mm2
Pole
h
l
Coil
d
w
* Tolerance = 50 T-mm2

SCU R&D Review, Jan. 31, 2014
Trajectory Error ScalingDetermine the standard deviation in the trajectory error for a random ensemble of undulator feature errors
Pole errors Characterized by a kick error (I1)
Total trajectory error is given by the sum of kick errors (Ki) with a drift length (x-xi) (i.e. ); scales with N3/2
Coil errors Characterized by a displacement error (I2) Total trajectory error is a simple random walk of individual displacement errors
(i.e. ); scales with N1/2
Pole Errors Coil Errors
• Trajectory errors scale with the undulator length to the power of 3/2

SCU R&D Review, Jan. 31, 2014
Second Integral Error
LCLS-II requirement
Phase Shake
• Random pole and coil errors with a given standard deviation are introduced using a Monte Carlo simulation for an undulator with length Lu = 3.3 m
• Calculations performed for as-built undulator with no field tuning• RMS machining errors of < 2μm were measured in the ½-m long LBL prototype• Second field integral can be reduced to meet the requirements with end and central field
correction mechanisms
Scaling of Trajectory and Phase Errors for Untuned Devices
linear increase with error size
quadratic increase with error size
LCLS-II requirementLu = 3.3 mEnd and central field tuning methods will be used to reduce the second integral error

SCU R&D Review, Jan. 31, 2014
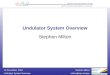
• Random errors generated using CMM-measured distribution of machining errors• Corrector locations and excitation (same for all locations) of correctors is applied• On average 11 correctors are needed to reduce the first and second integral
errors to negligible levels over 3.3 m• The trajectory requirement is met for the entire range of operation with the only
adjustment being the amplitude of the corrector current (same through all correctors)
Simulated Trajectory with Field Correction
11 correctors Before correction After correction
Lu = 3.3 m

8
Undulator Measurements at LBNL

SCU R&D Review, Jan. 31, 2014
Field Measurement Technology Approaches
Hall Probe (ANL) Local field measurement Need to know the location of the hall probe to high
accuracy
Stretched wire or coil scan (ANL) Obtain net first and second field integrals Only length integrated information
Pulsed wire (LBNL) Measure first and second field integrals Measurements give integral values as a function of
position along the length of the undulator

SCU R&D Review, Jan. 31, 2014
Pulsed Wire Method Description
Tensioned wire between two points
Part of the wire is in an external magnetic field
A current pulse is applied to the wire
The wire is subjected to the Lorentz force
A traveling wave moves along the wire
The displacement at a given point is measured
The displacement of the wire as a function of time is related to the spatial dependence of the magnetic field
Observation point (z = 0)
Bx(z)
Iz
y
x Traveling wave

SCU R&D Review, Jan. 31, 2014
Analytical Solution (Dispersion Free)
Solution for the wire motion at a given location as a function of time
A square current pulse with pulse width δt is assumed
General solution:
DC current:
δt 0:
: wire position at z = 0 as a function of time
ρ: wire mass per unit length
T: wire tension
c: wave speed
;
I1
ct
Special cases:
z

SCU R&D Review, Jan. 31, 2014
Dispersion
• The flexural rigidity of the wire leads to dispersive behavior• Thin wires with lower flexural rigidity are less susceptible to
dispersion• Dispersive behavior can be predicted using Euler Bernoulli
theory for bending of thin rods
Dispersive wave motion:
Undispersive wave motion:
Euler-Bernoulli BeamGeneral Solution

SCU R&D Review, Jan. 31, 2014
Experimental Validation
Wire motion detectorsWire position sensors (referenced to undulator fiducials)
Echo-7 Undulator
Wire Positioning stages

SCU R&D Review, Jan. 31, 2014
Wave Speed Measurement
Wave speed obtained by placing the motion sensor in two different locations and
measuring the phase difference as a function of frequency in the two signal
Fit to analytical expression
Wire motion from magnet at two locations Wave Speed

SCU R&D Review, Jan. 31, 2014
ECHO-7 First and Second Integral Measurement
15
Firs
t In
tegr
alS
econ
d In
tegr
alBefore Dispersion Correction After Dispersion Correction

16
SCU R&D Review, Jan. 31, 2014
ECHO-7 Phase Error
Phase error calculation with upstream and downstream detectors
Comparison of the calculated phase errors for Hall Probe and PW measurements
Wire damping introduces error in the field integral measurement which must be compensated in the calculation of phase errors

SCU R&D Review, Jan. 31, 2014
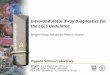
SCU Test System
Cryogen-free cryostat (two cryo-coolers)
Pulsed wire attachment at each end of the cryostat
In-vacuum pulsed wire measurement Decreased air damping overcome with passive damping
at the ends and pulse cancelling with reverse currentTest Cryostat
In-vacuum Pulsed Wire System

SCU R&D Review, Jan. 31, 2014
Measurement Plan
Pulsed wire will be used as the main method during the R&D and commissioning phase for the field correction mechanism at LBNL
The pulsed wire method will be incorporated and used as one of the measurement methods in the ANL measurement system
Absolute Keff measurements will be performed using the ANL hall probe system