-
1Periodic TaskScheduling
2
Problem formulation
For each periodic task, guarantee that:
each job tik is activated at rik = (k-1)Ti each job tik
completes within dik = rik + Di
ti (Ci, Ti) job tik
rik dik
-
815
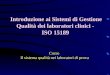
Rate Monotonic (RM) Each task is assigned a fixed priority
proportional to its rate [Liu & Layland 73].
0
500 10025 75
tA
tB
0
tC
40 80
100
16
How can we verify feasibility?
Each task uses the processor for a fractionof time:
i
ii T
CU =
Hence the total processor utilization is:
=
=n
i i
ip T
CU
1
Up is a misure of the processor load
-
917
A necessary condition
If Up > 1 the processor is overloadedhence the task set
cannot be schedulable.
However, there are cases in which Up < 1but the task is not
schedulable by RM.
18
An unfeasible RM schedule
0 9 18
6 120 183
3 6 12
9
15
15
deadline miss
t1
t2
944.094
63
=+=pU
-
10
19
Utilization upper bound
833.093
63
=+=pU
0 9 18
6 120 183
3 6 12
9
15
15
t1
t2
NOTE: If C1 or C2 is increased,t2 will miss its deadline!
20
A different upper bound
184
42
=+=pU
The upper bound Uub depends on thespecific task set.
0
4 120 8 16
t1
t24 128 16
-
11
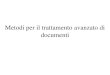
21
The least upper bound
1
G
Uub
Ulub
. . .
22
A sufficient condition
If Up Ulub the task set is certainlyschedulable with the RM
algorithm.
If Ulub < Up 1 we cannot say anythingabout the feasibility of
that task set.
NOTE
-
12
23
Ulub for RM
In 1973, Liu and Layland proved that for aset of n periodic
tasks:
( )12 /1lub -= nRM nU
for n Ulub ln 2
24
RM Schedulability
010203040
50607080
90100
1 2 3 4 5 6 7 8 9 10
69%
n
CPU%
-
13
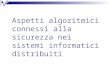
25
RM Guarantee Test
We compute the processor utilization as:
=
=n
i i
ip T
CU
1
( )12 /1 - np nU Guarantee Test (only sufficient):
26
Basic Assumptions
A1. Ci is constant for every instance of tti
A2. T i is constant for every instance of tti
A3. For each task, Di = Ti
A4. Tasks are independent: no precedence relations no resource
constraints
-
14
27
RM Optimality
RM is optimal among all fixed priorityalgorithms:
If there exists a fixed priority assignmentwhich leads to a
feasible schedule for G, thenthe RM assignment is feasible for
G.
If G is not schedulable by RM, then it cannotbe scheduled by any
fixed priority assignment.
28
Critical InstantFor any task ti, the longest response time
occurswhen it arrives together with all higher priority tasks.
t1
t2R2
t1
t2R2
-
17
33
Earliest Deadline First (EDF)
Each job receives an absolute deadline:
di,k = ri,k + Di
At any time, the processor is assigned to thejob with the
earliest absolute deadline.
Under EDF, any task set can utilize theprocessor up to 100%.
34
EDF Example
0 9 18
6 120 183
3 6 12
9
15
15
t1
t2
94.094
63
=+=pUDi = Ti
-
18
35
The RM unfesible schedule
0 9 18
6 120 183
3 6 12
9
15
15
deadline miss
t1
t2
944.094
63
=+=pU
36
EDF Optimality
EDF is optimal among all algorithms:
If there exists a feasible schedule for G, thenEDF will generate
a feasible schedule.
If G is not schedulable by EDF, then it cannotbe scheduled by
any algorithm.
-
19
37
EDF Optimality [Dertouzos 74]
s
tEt fE dE dk
tk
tE
Transforming ss in ss
s(t) = s(tE)
s(tE) = s(t)fk = fE dE dk
Feasibility is preserved
38
EDF schedulability
In 1973, Liu and Layland proved that for aset of n periodic
tasks:
1lub =EDFU
This means that a task set G is schedulableby EDF if and only
if
Up 1
-
22
43
RM vs. EDF
Its more efficient
It reduces context switches
EDF
It is simpler to implement oncommercial operating systems
More predictable during overloads
RM
44
Extension to tasks with D < T
ri,k di,k
Ci
tti
Di
Ti
ri,k+1
Deadline Monotonic:pi 1/Di (static)
Earliest Deadline First:pi 1/di (dynamic)
Scheduling algorithms
-
1Handling sharedresources
Problems caused bymutual exclusion
2
Critical sectionst2t1
globlalmemory buffer
write readx = 3;y = 5;
a = x+1;b = y+2;c = x+y;
int x;int y;
wait(s)
signal(s)
wait(s)
signal(s)
-
23
Blocking on a semaphore
CS
t1 t2
CS
p1 > p2
t1
t2
D
It seems that the maximum blockingtime for t1 is equal to the
length ofthe critical section of t2, but
4
Schedule with no conflicts
BCT
priority
SCT
MT
-
35
Conflict on a critical section
BCT
priority
SCT
MT
B
6
Conflict on a critical section
BCT
priority
SCT
MT
B
-
47
Priority Inversion
A high priority task is blocked by a lower-priority task a for
an unbounded interval of time.
SolutionIntroduce a concurrency control protocol foraccessing
critical sections.
8
Resource Access Protocols
Non Preemptive Protocol (NPP)
Highest Locker Priority (HLP)
Priority Inheritance Protocol (PIP)
Priority Ceiling Protocol (PCP)
Stack Resource Policy (SRP)
-
815
Problem with HLP
CS
test
t1
CS
t2
t1
t2
p1p2
t1 blocks just in case ...
16
Priority Inheritance Protocol[Sha, Rajkumar, Lehoczky, 90]
A task in a CS increases its priority only ifit blocks other
tasks.
A task in a CS inherits the highest priorityamong those tasks it
blocks.
PCS = max {Pk | tk blocked on CS}
-
917
Schedule with PIPpriority
t1
t2
t3p1
p3
direct blocking
push-through blocking
18
Types of blocking Direct blocking
A task blocks on a locked semaphore
Push-through blockingA task blocks because a lower priority
taskinherited a higher priority.
BLOCKING:a delay caused by a lower priority task
-
10
19
Identifying blocking resources
A task ti can be blocked by thosesemaphores used by lower
priority tasksand
directly shared with ti (direct blocking) or
shared with tasks having priority higher thanti (push-through
blocking).
Theorem:ti can be blocked at most onceby each of such
semaphores
20
Examplepriority
B Ct1t2t3
A
C
DB
A
D
t1 can be blockedonce by t2 (on A2 or C2) andonce by t3 (on B3
or D3)
t2 can be blockedonce by t3 (on B3 or D3)
t3 cannot be blocked