-
8/7/2019 SCAPE Working Paper 1 AC&TH
1/25
1
Emission Trading Scheme in the Maritime Industry:
An experimental analysis
Anthony Theng Heng China and Thiam Hao Chuab
aAssociate Professor, Department of Economics, National
University of Singapore
Email:[email protected]
bManagement Associate, PSA Corporation Ltd., 33 Harbour Drive,
#2 Pasir PanjangTerminal Building, Singapore 117606, Port of
Singapore Authority
Email:[email protected]
February 2011
Abstract
The International Maritime Organization has proposed the
implementation of a carbondioxide emission trading scheme for the
industry. Two problems associated with this is thatof high
noncompliance rate and the need to reconcile the both IMO and
UNFCCCprinciples. This study reports a laboratory experiment to
examine two design features of thepotential scheme that are related
to the problems identified. Our experimental parametersapproximate
the possible allocation method and other features of the maritime
industry.Two key findings from this study are, (1) Implementation
of the dynamic enforcementmodel reduces both permit noncompliance
and report noncompliance relative to the staticenforcement model
and (2) The initial allocation of permits, which provides a
solution toreconcile the two conflicting principle, impacts on the
efficiency of the scheme.
Keywords: Emission Trading Scheme, Experiment, Maritime, Dynamic
Enforcement,Initial Allocation
mailto:[email protected]:[email protected]:[email protected]:[email protected]:[email protected]:[email protected]:[email protected]:[email protected]
-
8/7/2019 SCAPE Working Paper 1 AC&TH
2/25
1. Introduction
Tradable emission permits (TEP) have been advocated to address
the problem of
greenhouse gases emissions (Dales, 1968; Montgomery, 1972;
Malik, 1990). It seems this is
a preferred method in reducing negative externalities to the
targeted level (Montgomery,
1972; Malik, 1990) even though command and control approaches
have been regarded as
less efficient as seldom adhere marginal principles (Hackett,
2006). The maritime sector in
particular, the International Maritime Organization (IMO) is
exploring the possibility of
implementing TEP (IMO Marine Environment Protection Committee
(MEPC), 2009a).
Carbon dioxide emission by international shipping is estimated
at 2.7% of the global
emission in 2007 and is projected to grow by 150% to 250% by
2050 (IMO MPEC, 2009b).
Proposals on a carbon dioxide emission permits trading system
(Emission Trading Scheme
or ETS) have been submitted by various countries to MEPC to the
IMO Marine
Environment Protection Committee (MEPC) for consideration (IMO
MEPC, 2009c).
However two issues need addressing. First, as the scheme
encompasses a global
dimension, the United Nations Framework Convention on Climate
Changes (UNFCCC)
guiding principle of Common but Differentiated Responsibilities
(UNFCCC, 1997a) will
have to be incorporated into the ETS. This conflicts with IMOs
principle of treating all
ships in the industry equally (MEPC, 2009d). Hence, this study
proposes a solution to
resolve this conflict by varying the initial allocation of the
permits. The second issue is the
problem of low compliance rate, a crucial component that impacts
the economic and
environmental efficiency of the scheme (Harford, 1978; Stranlund
and Dhanda, 1999). This
enforcement problem is more serious in the maritime industry due
to a few inherent
characteristics. A unique trait of the sector is the confusion
in enforcement role created by
the overlapping ofregulatory responsibilities between the flag
state (the state which the ship
is registered in), coastal state (the state whose water the ship
is sailing in) and the
classification societies (a non-governmental body that
establishes rules for the industry)
(Stopford, 2009). In addition, primary data sources for carbon
dioxide emissions comes
from fuel consumption sources such as Bunker Delivery Note and
Engine Logbook, can be
manipulated. This study aims to evaluate if the implementation
of a dynamic enforcement
model in the industry can increase the efficiency of the
scheme.
This study employs experimental techniques to study the
implementation of the ETS
in the maritime industry. The lack of literature has led to the
employment of a stylized
experiment model which incorporates features of the maritime
industry. Treatment variablesin the experiment, such as dynamic
enforcement model, are also modeled after policy
-
8/7/2019 SCAPE Working Paper 1 AC&TH
3/25
3
suggestions for the industry. This linkage with the industry
ensures a high external validity
of the results. The model incorporates many designs that are
relevant to policy makers. For
instance, two different treatment variables were used in our
experimental framework to
allow for the testing of theories and models. The first
treatment variable is the Harrington
(1988) dynamic enforcement model. The experiment in the study
seeks to study its impact
on noncompliance. Our experimental results is consistent with
the theories that
noncompliance in this model will decrease relative to the static
enforcement model (Harford,
1978). The second treatment variable is the initial allocation
of permits. We find that this
initial allocation does impact noncompliance and efficiency, a
result that contradicts
standard theories (Montgomery, 1972).
The following section reviews the literature and develops
features of the
experimental model which link the model and characteristics of
the maritime industries.
Section 3 introduces the design of the experimental setup and
describes the experimental
procedure. Section 4 introduces several hypotheses and
discussion of the results from the
experiment. The final section concludes.
2. Literature Review and Features of the Model
The main advantage of ETS is its ability to minimize the
aggregate cost of the target
abatement level (Godby et al., 1997). Firms with lower abatement
cost have an incentive to
sell their permits to firms with higher abatement costs. Mutual
benefit from trading permits
exists when this transaction price is between the current
marginal abatement costs of both
firms. In equilibrium, the permit price is equal to the marginal
cost of abating pollution
across all firms (Montgomery 1972; Buckley et al., 2007). Hence,
the total abatement cost
in the system is minimized with this incentive-compatible trade
mechanism. Moreover, this
optimum point is attained with minimal administrative burden on
the regulator as firms
interact directly in the permit market. In addition, the cap on
the maximum emissions in
the ETS allows a clear overall environmental standard to be set.
However, these merits are
conditional on many small design factors of the scheme (Cason,
2010). Those factors that
are relevant to the research questions will be incorporated into
the experimental model.
2.2 Initial Allocation of Permit
One feature that is of concern to the maritime industry is the
initial allocation of
permits. This issue of allocation has generally been considered
as a distributional problemrather than one that impacts on
efficiency (Kerr, 1999). However, experiments have shown
-
8/7/2019 SCAPE Working Paper 1 AC&TH
4/25
4
that the presence of market power leads both the post-trade
permit allocation and the permit
prices to be affected by the initial allocation (Hahn, 1984). In
another experiment (Cason,
Gangadharan and Duke, 2003) investigating the impact of market
power, the number of
buyers and sellers in the different treatments were changed. In
this experiment, increasing
market power is represented by a smaller number of buyers or
sellers. However, the
differences in efficiency and prices were found to be
insignificant. This is in line with
Smiths (1981) experimental results which showed that the double
auction structure is the
most likely to result in competitive equilibrium outcome
compared to other institutions.
The initial allocation of permits is one of the two treatment
variables in the
experiment. In four of the total sessions, all subjects in the
session are allocated the same
number of permits. This uniform pre-trade allocation of permits
is in line with the IMO
principle of equality towards all ships so shipping lines are
given the same number of
permits regardless of her flag states. In the other four
sessions, the allocation of permit
among the subject is as follows: Subjects with lower abatement
cost functions are given
more permits than those with higher abatement cost function.
This is to model the situation
where ships registered in Non Annex I countries are being
allocated more permits. These
non Annex I countries are mostly developing countries (UNFCCC,
1997b) with lower
abatement costs functions. Thus this allocation method reflects
their reduced responsibility
in contributing to climate change effects. However, the total
number of permits in the
experiment is a constant in all sessions to ensure consistency
in the sessions. The number of
buyers and sellers are also kept equal in all sessions to
eliminate the effect of market power.
Thus, any differences in efficiency can be attributed to other
factors.
2.3 Enforcement Model
Enforcement is crucial to the maritime industry due to potential
high noncompliance.
A sizable collection of literature exists to provide a
comprehensive discussion on this aspect.
Only those relevant to our model will be discussed here. Using a
model of non-compliant
firms, Stranlund and Dhanda (1999) demonstrated that the
application of enforcement
efforts should be independent of regulated firms exogenous
characteristics. In an ETS,
firms are linked up via the permit market so the marginal
compliance cost for each firm for
is equivalent to the permit prices in the market. Thus, the
individual firms abatement costs
do not impact their compliance decisions.
Theoretical models have shown that imperfect enforcement, which
Stranlund et al.(2008) defines as enforcement efforts that are
insufficient to induce full compliance by all
-
8/7/2019 SCAPE Working Paper 1 AC&TH
5/25
5
firms, are not as costly as predicted by standard theory of
perfectly competitive firms
(Malik, 1990; Stranlund et al., 2008) They found that aggregate
abatement costs can still be
minimized despite some noncompliance. In fact, empirical studies
conducted have found
that between 60 to 80 percent of regulated firms in ETS have
high compliance rates despite
low penalties and imperfect monitoring (Arora and Cason, 1996,
Gangadharan, 2001).
Some of the firms even exceeded the standards they need to keep.
Explanations for this
puzzling phenomenon varies from of avoidance of negative impacts
on the companys stock
prices (Dasgupta, Laplante and Mamingi, 1997) to the
over-compliance serving to increase
costs for their rivals when the regulator increases the overall
standard (Salop and Scheffman,
1983).
Another commonly cited explanation is Harringtons (1988) dynamic
enforcement
model, which will be the second treatment variable in our
experiment. Researches on the
field of enforcement require economic experiments due to the
absence of reliable field
information (Cason and Gangadharan, 2004). The differences
between two dynamics
enforcement models have been studied (Cason and Gangadharan,
2004; Clark et al., 2004)
but there has been a gap in the literature for the comparison of
a dynamic and a static
enforcement model. In this study, the merits of the dynamic
enforcement model will be
evaluated relative to the baseline case of a standard static
enforcement model (Harford,
1978)
A high noncompliance rate is expected in the ETS for the
maritime industry due to
the difficulty of enforcement. Many of these reasons are due to
the inherent characteristics
of the industry such as its multinational nature and the blurred
division of responsibilities
between the different regulators. Implementation of Harringtons
(1988) model is expected
to reduce the noncompliance rate in the industry due to the
leverage of the two inspection
groups. Relative to a static enforcement model, the dynamic
model actually reduces the
monitoring resources required. As long as IMO remains
transparent on the classification of
ships into the inspection groups, this model is in line with its
principle of equality towards
all ships, despite the use of two inspection groups. Our
subsequent results in the experiment
support the implementation of this enforcement model in the
industry.
A brief introduction of the dynamic enforcement model will be
provided1
1 Readers are urged to consult the reference study, Harrington
(1988), for a more detailed analysis on themodel.
. In this
dynamic repeated-game model, both the regulator and the
regulated firm can react to the
other parties actions in the previous round. The regulator
devises two inspection groups G1
-
8/7/2019 SCAPE Working Paper 1 AC&TH
6/25
6
and G2 that firms can be classified into. The enforcement
variables are harsher in the bad
group G2 than G1. The probability of inspection in group i (pi)
and fine per unit in group i (Fi)
are such that p2 > p1 and F2 > F1 respectively. If the
firm is in G1 when inspected and is then
found to have violated the rule, they will be classified to G2.
If firms are inspected in G2 and
found to be in compliance, they will be reclassified back into
G1. This creates a Markov
decision problem from the perspective of the firm.
In a conventional static enforcement model (Harford, 1978;
Linder and McCabe,
1984), a firm violates the rules when marginal compliant cost, c
is greater than expected
fine pF (c> pF). However, even if c> pF in the dynamic
model, Harrington postulated that
the model would actually provides a leverage, L, that makes
compliance optimal in G2 even
when c rises to as high as ])p1(1[
)Fp-F(pp
Fp1
11222
22
+ where is the discount factor. An
important assumption underlying the model is the existence of a
maximum penalty that can
be imposed. This assumption is often relevant in reality as
there are often constraints to the
size of the fine. The marginal cost of compliance, c, in an ETS
is the permit price in the
market as the purchase of another permit can legally reduces the
abatement effort by one
unit. Hence, a dynamic enforcement model can increase compliance
rate relative to a static
model. Modifications to the model have been proposed in
subsequent literature such as
Harford (1991) who analysed the equilibrium in a dynamic
enforcement model where some
random errors exist in measuring the level of compliances. In
our experiment, the baseline
Harrington model will be adopted instead for simplification.
2.4 Other Features
Two other design features relevant to the maritime industry will
be incorporated into
the experimental model. The first feature is an injection of
uncertainties, in the form of an
abatement shock. This shock element is a simulation of the
uncertainties on their eventual
emission level that shipping lines face. This can be attributed
to measurement errors
(Carlson and Sholtz, 1994) or uncertainties in the container
loads for the period ahead.
Besides Cason and Gangadharan (2006), other ETS experiments that
included shock in the
setup use a shorter range of (-1, 0, 1) (Godby et al.,
1997).
The second feature is the inclusion of self reporting. The high
costs involved with
international monitoring means that regulators from the port
state or flag state frequently
have to rely on the reports of shipping lines to determine
compliance. Besides injecting
realism into the experimental model, the addition of this
feature allows an additional
-
8/7/2019 SCAPE Working Paper 1 AC&TH
7/25
7
dimension of noncompliance to be studied. Noncompliance usually
refers to the actual
abatement noncompliance, which is not having sufficient permits
for the emission level. In
our experiment, there is an additional measure of noncompliance
exists. Report
noncompliance refers to the misrepresentation of the actual
emission level. Previous ETS
experiments have found a strong relationship these two forms of
violations (Stranlund,
Costelli and Chaves 2005).
3. Experimental Design
Many experimental economists have established a systematic
methodology for
conducting experimental studies (Hey, 1991; Bardsley et al.,
2010). This study will draw
upon these frameworks and principles in designing and conducting
the experiment. The
subjects for the experiment were recruited from the student
population of the National
University of Singapore. The justification for the use of
students in the experiment is based
on the assumption that all agents are incentive-motivated
rational beings. Furthermore, the
inclusion of performance-related incentives for the students is
a form of extrinsic motivation
to drive them in maximizing their self interests (Bardsley et
al. 2010). The subjects
behaviour can then resemble the behaviour of firms in the real
world ETS due to the similar
goal of incentive-driven motivation. In addition, the conversion
rate2
A total of 9 experimental sessions were conducted. The first
session was a pilot test
and its results were discarded for the analysis. Improvements to
the model and experimental
procedure were made with the feedbacks collected from the pilot
test. For the remaining 8
sessions, the treatment variables were interacted in a balance
2x2 design as seen in Table 1.
is set such that the
average and maximum earnings of the participants are above that
of the wage that they
could have earned for NUS official works in the two hours. This
feature is compatible with
the high potential payoff for firms in the real world.
Table 1 Interaction of treatment variables
2 The conversion rate was 1 Singapore dollar = 300 experimental
dollars
Initial Allocation of Permits
Uniform Allocation Non Uniform Allocation
Enforcement
Model
Dynamic EnforcementModel
2 Sessions 2 Sessions
Static EnforcementModel
2 Sessions 2 Sessions
-
8/7/2019 SCAPE Working Paper 1 AC&TH
8/25
8
There were a total of two sessions for each interaction of
treatment variables. For
instance, the top left box indicates that two sessions were
conducted for a setup which every
participant was given the same initial allocation of permits and
also subjected to the
dynamic enforcement model. Thus, there are a total of four
sessions with uniform initial
allocations of permits and another four sessions with non
uniform initial allocations of
permits. Similarly, there are four sessions which the regulators
enforcement is done
through the dynamic enforcement model and another four sessions
which it is done using
the static enforcement model. Randomization was done both on the
sitting position of the
subjects and the choice of the experiment days to conduct each
treatment session.
The treatments in the experiment were designed to test the
hypotheses related to
total emission and compliance. These will be specifically
postulated in the next section.
Although actual technical and environmental terminologies are
used in describing the
results and experimental designs, subjects were placed in a more
neutral environment to
avoid potential biasness. For example, abatement choice was
framed as a production
decision while abatement permits were simply labeled as coupons.
The experiment was
entirely programmed and conducted using the University of
Zurichs z-Tree program
(Fischbacher, 2007).
In each period, the emission level for each subject is fixed at
10 units. Each permit
allows him to legally emit one unit and avoid the abatement cost
for that unit. Thus, if the
subject has no permit at the end of the period, he has to incur
abatement costs to clean up
(abate) all 10 units of the emissions to comply by the rule.
More generally, the total
number of permits + the actual abatement at the end of every
period must be greater than
or equal to 10 units to abide by the rule.
All subjects start each stage with 2000 experimental dollars and
a fixed allocation of
permits depending on the treatment sessions that they are in.
Subjects were told that the
number of periods is randomly selected by the computer and is
between 8 10 although it
has been fixed at 9. Subjects were not told the exact number of
periods to avoid them
behaving in non-optimal manner in the last period 3
. The marginal abatement costs functions
for the 8 firms are based on the Cason and Gangadharan (2006)
study and shown in Table 2.
3 For sensitivity check, the same analysis was done without the
8th and the 9th. There was no qualitative impacton the results.
.
-
8/7/2019 SCAPE Working Paper 1 AC&TH
9/25
9
Table 2 Assigned marginal abatement cost functions
Units of abatementType 1
(Firm 1 and 2)Type 2
(Firm 3 and 4)Type 3
(Firm 5 and 6)Type 4
(Firm 7 and 8)
1 53 67 27 352 61 70 35 38
3 70 74 44 424 80 79 53 475 91 86 63 541
6 103 95 73 637 116 106 84 748 130 119 98 889 145 134 113 10510
161 151 129 125
Permit Endowment inuniform allocation
4 4 4 4
Permit Endowment innon-uniform allocation
2 3 5 6
1Highlightedin bold are the abatement cost saving based on the
initial distribution of permits in the non-
uniform allocation.
In both uniform and non-uniform treatments, a total of 32
permits are endowed in
the system per period. From another perspective, the target
emissions level in each period is
equivalent to the total endowment of permits, which is equal to
32. Trading of permits can
reduce the total abatement costs incurred in the system in both
treatments. In the optimum
competitive equilibrium, prices of successful transaction of
permits are in the interval of 88
to 91 and subjects have an incentive to trade. The post-trading
permits holding should be as
follow: type 1 and 2 firms hold 6 permits and 5 permits
respectively while type 3 and 4
firms hold 3 permits and 2 permits respectively. In this optimum
equilibrium, the total
abatement cost of the system is minimized at 2920.
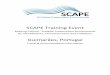
Each period is divided into a few stages as shown in Figure 1.
Stage 1 is a permit
trading stage whereby all 8 subjects participate in a three
minutes double auction permit
market. In the second stage, the subjects will enter an
abatement target. However, their
actual abatement level can vary from their target abatement
level due to a shock that is
randomly drawn from a uniform allocation of (-2, -1, 0, 1 or 2).
In stage 3, subjects will be
informed of the magnitude and direction of the shock that they
experienced. Their
corresponding actual abatement, and also realized emission, will
be indicated. The
abatement cost incurred by each subjects is according to his or
her actual abatement level.
Stage 4 is another auction round for subjects to purchase or
sell their permits. This is a
reconciliation period that is a common feature in ETS as it
allows subjects to finalize their
-
8/7/2019 SCAPE Working Paper 1 AC&TH
10/25
10
permit holdings. The setup of this second auction round is
similar to stage 1 except that it
lasts only for two minutes.
Figure 1 Graphical display of the stages in one period
In stage 5, subjects will decide on the emission units to report
to the inspector,
which is the computer in the experiment. Then, the inspector
will randomly select subjects
for inspection based on the inspection probability. In this
experimental model, the regulator
has perfect information on the number of permits that each
subject holds, which is a
common feature of most ETS with well-designed permit registries.
If the inspector selects a
subject for inspection, he will then know the actual abatement
units. Thus, the subject will
be fined if he is not complying by the abatement rule (number of
permits + the abatement
units is less than 10 units) or his reported abatement level is
different from the true
abatement level. For each unit that the subject differs, he or
she will be fined the amount
stipulated and the higher of the two total fines for violation
will be used. However, if the
inspector chooses not to inspect the subject, he will rely on
the reported unit to determine if
the subject is not complying by the abatement rule (number of
permits + the abatement units
is less than 10 units). In the treatment session with static
enforcement model, the probability
that the inspector will choose a subject for inspection is 0.5
and the per unit fine for
violation is 150. However, if the session is one with dynamic
enforcement level, there are
two inspection groups as mentioned in Section 2.3. If a subject
is in group 1 and violates the
rules, he will be moved to group 2. If he is inspected in group
2 and found to be compliant,
he will be moved back to group 1. The probability of inspection
and fine for violation in
group 1 is 0.3 and 60 respectively. For group 2, the probability
of inspection is 0.6 and the
fine for violation is 150 (A summary of these details are in
Table 3.4). All subjects in these
sessions start the experiment in group 1. In the last stage of
the period, subjects were told if
they were inspected and the amount of cash that they have at the
end of this period. They
are also given a fixed sum of revenue that is known to them.
After this display summarystage, the first stage of the next period
will then begin.
First Stage: Firstauction round to
buy or sell permits.
Second Stage: Set
Abatement Target
Third Stage:Confirmation of theabatement shock and
actual abatement
Fifth Stage: Reportto inspector on
actual abatement.
Sixth stage: Displayend of periodinformation.
Fourth stage: Secondauction round to buy
or sell permits
-
8/7/2019 SCAPE Working Paper 1 AC&TH
11/25
11
Table 3 Inspection details for the dynamic enforcement model
Inspection Group 1 Inspection Group 2
Inspection Probability is 0.30 Inspection Probability is
0.50
Fine for Violation (Per Unit): 60 Fine for Violation (Per Unit):
150
3.1 Experimental Procedure
The instruction sheets and the colour screenshots, which are
included in Section 8.1
and 8.2 (Appendices) respectively, were emailed to the
participants one day before their
session. They were notified about this through an SMS to their
mobile phone. A copy of the
instruction sheet was given to the subjects on the day of the
experiment. The same
instructions were read aloud to them before the session began
and they were allowed to
clarify doubts that they had. Moreover, participants had to
answer a short quiz correctly
before they were allowed to start the experiment. The quiz was
designed to test their
understanding of the model. After the experiment, they were then
asked to answer a short
questionnaire before leaving the venue. The experimental dollars
that they earned over the
nine periods was converted into Singapore dollars at a rate of
Singapore dollar (S$) 1 = 300
experimental dollars. This rate was chosen with the objective of
fulfilling the incentive
compatible condition so that the expected earning of the student
will be higher than the
official NUS wage rate for undergraduates ($8.64/hour). The
minimum and maximumearning of the subjects in each session were
S$16 and S$38.50 respectively while the
average earnings was S$21.64. These earnings were credited into
the bank accounts of the
participants. Care was taken to ensure that the entire
experimental session conveyed a sense
of professionalism. The experiment was held over 3 weeks in
March 2010 and each session
lasted around 2 hours.
4. Hypotheses
This experiment was designed to allow for the testing of several
hypotheses related
to the design of an ETS, especially one for the maritime
industry. The first 4 hypotheses are
specifically related to the compliance behaviour of agents in an
ETS. These hypotheses will
test noncompliance on two different dimensions. The first type
of noncompliance is on
violations in terms of the actual abatement units, which refers
to whether the sum of the
total permits held and actual abatement is equal to or more than
10. The second type of
noncompliance pertains to the report violation and check if the
abatement report is equal to
the actual abatement.
-
8/7/2019 SCAPE Working Paper 1 AC&TH
12/25
12
Hypothesis 1: Noncompliance is greater for agents in the static
enforcement model
Hypothesis 2: Noncompliance is greater when permit prices are
higher.
Hypothesis 3: Noncompliance is not different for agents in the
presence of different
marginal abatement cost.
Hypothesis 4: Noncompliance is greater following greater
(positive) shocks to emissions.
The first hypothesis concerns the Harrington dynamic enforcement
model which
was introduced in section 2.3.The use of a two group inspection
model provides a leverage
which increases the compliance rate relative to the one group
static enforcement model. In
the static enforcement model, the expected per unit fine for
violation is only 75 (0.5 x 150)
and definitely less than the expected permit price interval of
88 to 91. Thus, non compliance
is expected. In the dynamic enforcement model, the expected fine
for violation in G2 is the
same (0.5 x 150 = 75) as in the static model, but the expected
fine for violation in G 1 is even
lower at 18 (0.3 x 0.6). Hence, noncompliance should be higher
in the dynamic enforcement
model due to the lower overall expected fine in G1 and G2.
However, Harrington postulates
that the enforcement leverage provided by the two inspection
groups makes compliance
optimal for subjects in inspection group 2 even when the permit
price rises as high as 132 4
Hypothesis 2 and 3 follows from Stranlund and Dhanda (2004) who
postulate that
the permit price in an ETS is the marginal compliance cost for
all agents since they can
remain in compliance by obtaining permits in the market. Thus,
higher permit prices
correspond to higher marginal compliance costs and should lead
to an increase in
noncompliance, as stated in hypothesis 2. Following this
argument, noncompliance decision
should be independent of individual marginal abatement cost as
stated in hypothesis 3.
Firms are linked up by the permit market and can obtain the
permit at the same price. Thus,
the same marginal compliance cost, c, holds for all firms in the
market. All the variables
that impact the decision to comply (c, p and F) are independent
of the individual abatement
.
Thus, the level of noncompliance is expected to be lower in the
dynamic enforcement
model. If the hypothesis is true, the dynamic model increases
compliance with a reduced
cost of enforcement relative to the static model. The lowered
enforcement cost is due to the
lower probability of inspection which translates to lower
resources spent on monitoring.
4 As explained in Section 2.3, the formula to calculate this
is])p1(1[
)Fp-F(ppFp
1
11222
22
+ , where =0.83 as
assumed in Cason and Gangadharan (2006) study. This assumption
ofis a conservation estimate with the
use of 20% as the rate of discount. Using a lower rate of
discount will actually increase both and the
leverage in this model. Hence, the results in the analysis still
hold.
-
8/7/2019 SCAPE Working Paper 1 AC&TH
13/25
13
cost. In addition, hypothesis 4 states that a greater emission
shock, which is equivalent to a
lower abatement shock in our experiment, will increase
noncompliance due to the increase
in permit prices. Thus, this increases the cost of compliance,
resulting in lower compliance.
The last 2 hypotheses concern the performance of the scheme when
the initial
allocation of permits varies.
Hypothesis 5: Noncompliance is not different when the initial
allocation of permit is
changed.
Hypothesis 6: Trading efficiency is not different when the
initial allocation of permits is
changed.
A well known result in the ETS literature is that the emission
choice of agents is
independent of the initial allocation of permits (Montgomery,
1972; Malik, 1990). However,
Stranlund and Murphy (2004; 2005), consistently uncovered
significant differences in the
compliance choice when the initial distribution of permit is
varied. Thus, these hypotheses
will be tested in the more realistic simulation of the ETS in
this study. In addition,
hypothesis 6 states that the trading efficiency of the system
should not be affected by the
initial distribution of permits. This trading efficiency index
(Cason and Gangadharan, 2003)
is defined as a ratio of the maximum available gain from trade
possible in each period and
the formula is
Cost.AbatementOptimum-costabatementPeriodofStart
CostAbatementPeriodofEnd-CostAbatementPeriodofStart 5
. This measurement of
efficiency is solely confined to the trading possibility and
does not concern itself with
welfare benefits as this would require an additional social cost
function.
5. Results
5.1 Summary of Results
The discussion of the results will first begin with three tables
that summarize the
noncompliance behaviour of the subjects and the total emission
level in each period. Table
4 shows the magnitude of noncompliance both in terms of actual
abatement violations
(Actual) and report violations (Report). On both dimensions, the
mean and median
noncompliances were greater in the static enforcement treatment
relative to the dynamic
enforcement treatment. These observations provide evidence for
hypothesis 1 which states
5 End of Period Abatement Cost is calculated based on the number
of permit held at the end of period
-
8/7/2019 SCAPE Working Paper 1 AC&TH
14/25
14
that a dynamic enforcement model can reduce the noncompliance
rate in the scheme. This
will be further studied using regression analysis in the next
section.
Table 4: Summary statistics for individual noncompliance
Mean Median Std Dev
Dynamic Enforcement Model (Report) 0.8945 0 1.8021
Static Enforcement Model (Report) 1.7421 1 2.0967
Dynamic Enforcement Model (Actual) 0.9492 0 1.7268
Static Enforcement Model (Actual) 1.7070 1 1.9088
Table 5 compares the total emissions level in the scheme for the
two enforcement
models. Both mean and median of the emission level was higher in
the static enforcement
model compared to the dynamic enforcement model, giving further
evidence for hypothesis
1.6
Table 5 Summary statistics for total emission in a period
Mean Median Std Dev
Dynamic Enforcement Model (Report) 36.5625 36.5 5.9456
Static Enforcement Model (Report) 45.0312 44 6.1721
Dynamic Enforcement Model (Actual) 36.5625 36.5 5.9456
Static Enforcement Model (Actual) 45.0312 44 6.1722
In addition, the data in Table 6suggests that uniform
allocations leads to higher non-
compliance, although the difference is minimal.
Table 6 Summary statistics for individual noncompliance
Mean Median Std Dev
Uniform Allocation (Report) 1.4648 0 2.1067
Non Uniform Allocation (Report) 1.1718 0 1.8770
Uniform Allocation (Actual) 1.4375 0 1.9312
Non Uniform Allocation (Actual) 1.2188 1 1.7776
5.2 Multivariate Regression Model
The next part of the result analysis will utilise a multivariate
regression model to
allow the impact of multiple influences on the dependent
variables to be studied. The main
objective of this investigation was to test the specific
hypotheses proposed in the previous
6A nonparametric, univariate Wilcoxons signed-rank test was also
conducted for variables in Table 5.2. Inorder to satisfy the
statistical independence requirement for such a test, one
observation per session was used
for each test. The differences in emission were found to be
significant for only some periods. Based on thistest, there is no
significant evidence to suggest that the emission levels are
different when enforcement modelis changed.
-
8/7/2019 SCAPE Working Paper 1 AC&TH
15/25
15
section and the analysis was performed using the computer
program Stata. In the analysis
below, results from the first period were excluded to minimise
the learning and price
discovery effects; these exclusions were found to have no
qualitative impacts on the any of
the conclusions drawn7
Table 6 and Table 7 present the result of a linear random effect
model of the
compliance decisions for the subjects. The choice for the random
effect model was to take
into account that our experimental data is a form of panel data
where some observations are
from the same subjects, who participated in multiple rounds.
Moreover, the number of
subjects is high relative to the number of periods. In addition,
the Probit and Tobit models
were employed to study on the compliance decision regarding both
reporting
noncompliance and actual abatement noncompliance.
.
Table 6 Random effect probit model on compliance decision
Explanatory Variables
Dependent Variables:
[Probit Model (=1 if Comply)]
Model 1 Model 2
Actual AbatementCompliance
Report Compliance
Dynamic Compliance Model 0.7090 (0.1710) ** 0.8125 (0.1771)
**
Uniform Allocation - 0.3932 (0.1844) * - 0.5004 (0.1894) **
Individual Shock 0.2471 (0.0455) ** 0.2630 (0.0466) **
Marginal Cost -0.0242 (0.0050) ** - 0.0258 (0.0051) **Mean
Pricea - 0.0331 (0.0143) * - 0.0326 (0.0148) *
Constant 6.4977 (1.5563) ** 6.8037 (1.6007) **
Observations 512 512
Number of Subjects 64 64
Wald Chi-Squared (5) 87.68 94.87
Prob > Wald Chi-Squared (5) 0.0000 0.0000
1.Standard error in parenthesis.2.*: denote significant at the
5% level using a two tailed test.3.**: denote significant at the 1
% level using a two tailed test.4.
a Estimated using IV method
In the Probit model (Model 1 and 2), the dependent variable is
the binary
compliance decision (=1 if subject comply) for subject groups
11, 12, 88, in the period t
= 2, 3, , 9. In the Tobit Model (Model 3 to 5), the dependent
variable is the magnitude of
noncompliance for the same observations. Usage of the Tobit
model was to take into
account the lower limit of 0 for the magnitude of violations.
There were a total of 64
7 From the 8th period, there exists a possibility that the
session may end after the period. Thus, one can argue
that subjects might have played the game differently. As a form
of sensitivity check, regressions of the sameequations were run
without data from the 8th and 9th period in each session.
Discarding these data produces noqualitative differences in the
result that follows.
-
8/7/2019 SCAPE Working Paper 1 AC&TH
16/25
16
participants and each of them went through 8 periods, creating a
balance panel data set. The
uniform allocation ( = 1 if the initial allocation of permit is
uniform; 0 if it is non-uniform)
and the dynamic enforcement model ( = 1 if the treatment is
dynamic enforcement model; 0
if it is static enforcement model) were modeled as dummies.
Other explanatory variables
included are the individual shock(s) experienced in that period,
the marginal cost (which
captures the highest marginal cost of each agent) and the mean
prices of successful permit
transactions. However, this price variable is endogenous as
higher compliance rate might
increase the prices in the auction stage. As in the standard
instrumental variables technique,
a separate price equation based only on exogenous factors was
performed and this predicted
price is then included in the compliance equation. 8
In all 5 models, the coefficients of the dummy variable for the
enforcement model
are strongly significant. In addition, the sign of this
coefficient is positive in model 1 and 2
and negative in model 3 5, providing strong evidence for
hypothesis 1 that the dynamic
enforcement model reduces both the likelihood of agents
non-complying and the magnitude
of non-compliance. These results are valid for both report and
actual abatement
noncompliance. Using mean value as the base, Model 1 and 2
allows us to estimate the
increase in probability of compliance if dynamic enforcement
model is used instead of static
enforcement model. Using the dynamic model increases the
probability of compliance by
27 percent
9
The dummy for the initial allocation of permits is also
significant in model 1 and 2,
which suggests that the allocation method has an impact on the
compliance decisions of the
agents. The negative coefficient means that a change from a
non-uniform to a uniform
allocation decreases compliance. Thus, this result refutes
hypothesis 5 and suggests that the
allocation method is significant in determining noncompliance.
Having a uniform allocation
will, relative to a non uniform allocation, decrease the
probability of agents complying by
approximately 15 percent and 18 percent for actual abatement
violations and report
violations respectively. An interesting result is that the
allocation variable is not significant
in Model 3 and 5. Hence, the initial permit allocation is
significant in explaining whether
and 30 percent for actual abatement compliance and report
compliance
respectively. This difference is significant and provides
evidence for the use of the dynamic
enforcement model in the maritime industry.
8 The exogeneous variables included in the equation are the
following: dummy for the initial allocation,dummy for the
compliance model, magnitude of total shock in that period and the
fine paid by the subject inthe previous period. The dependent
variable is the mean transaction price. (Model Quality:
Observations: 512,
R-Squared: 0.2663, Prob> Chi(4) =0.000)9 This is done using
the standard mean estimation for Probit model. The exact workings
are available uponrequest.
-
8/7/2019 SCAPE Working Paper 1 AC&TH
17/25
17
agents decide to comply or not but is unable to account for
their magnitude of violation
should they choose not to comply.
Table 7 Random effect probit model on noncompliance
ExplanatoryVariables
Dependent Variable: (Tobit Model with lower limit of 0)
Model 3 Model 4 Model 5Magnitude of
Noncompliance(Actual Abatement
Violation)
Magnitude ofNoncompliance
(Actual AbatementViolation)
Magnitude of
Noncompliance(Report Violation)
DynamicComplianceModel
- 0.6208 (0.2268) ** - 0.7375 (0.2110) ** - 0.7810 (0.2286)
**
UniformAllocation
0.4107 (0.2419) 0.3907 (0.24626)
IndividualShock - 0.2095 (0.0523) ** - 0.2263 (0.0500) ** -
0.2451 (0.0569) **
Marginal Cost 0.0250 (0.0068) ** 0.0250 (0.0070) ** 0.0291
(0.0068) **
Mean Pricea 0.0208 (0.0166) 0.0079 (0.0181)
Constant - 3.9804 (1.8800) * - 1.8500 (1.0067) - 3.3119
(1.9949)
Observations 512 512 512
Number ofSubjects
64 64 64
Wald Chi-Squared (5) 50.39 46.18
b
59.03
Prob >Wald Chi-Squared (5)
0.0000 0.0000 c 0.0000
1.Standard error in parenthesis.2.*: denote significant at the
5% level using a two tailed test.3.**: denote significant at the 1
% level using a two tailed test.4.a :Estimated using IV method;5.b
:Statistics for Wald Chi-Squared(3) test;6.c :Statistics for Prob
>Wald Chi-Squared (3)
Another significant variable in all 5 models is the individual
shocks. The positivesign of the coefficient in model 1 and 2
indicates that a higher abatement shock (which is
equivalent to a lower emission shock) will increase compliance.
This relationship is also
supported by model 3 5 which suggests that higher abatement
shock reduces
noncompliance. Thus, these results provide strong evidence for
hypothesis 4.
The marginal cost variable is also significant at the 1 percent
significance level in all
5 models. Thus, both the decision of whether to comply and the
magnitude of
noncompliance can be explained by the individual marginal cost
function. This is not in line
-
8/7/2019 SCAPE Working Paper 1 AC&TH
18/25
18
with Stranlund and Dhandas model which predicts that exogenous
firm characteristics
should not impact compliance rate. Thus, hypothesis 3 is
rejected.
Hypothesis 2 states that a higher permit price should result in
greater noncompliance.
The Probit model on the binary decision to comply supports this.
A negative coefficient
indicates a negative relationship between the permit price and
compliance decision, as what
the theory predicts. Moreover, this variable is significant at
the 5% level, providing support
for hypothesis 2. On the other hand, the variables coefficient
in model 3 and 5 is positive,
suggesting the same relationship. However, this variable is not
significant, even at the 5
percent level.
It must be added that model 4 was included in the regression to
test if the removal of
two insignificant variables (Allocation and Mean price) changes
any qualitative results for
the three remaining variables. No such effect was detected.
Table 8 shows the results of a Tobit regression model where the
dependent variable
is the trading efficiency. The initial allocation variable is
significant in explaining the
difference in trading efficiency, even at the 1 percent level.
The negative coefficient implies
that a switch to a uniform allocation will result in lower
trading efficiencies. Thus,
hypothesis 6 is rejected as experimental results show the
initial allocation has an impact on
the efficiency of trading. The inclusion of model 7 serves the
same purpose as model 4 in
checking that the addition of redundant variable10 has no
qualitative impact on the result11
5.3 Discussion of Results
.
The results from the experiment provided strong evidence that
the dynamic
enforcement model reduces both permit noncompliance and report
noncompliance. The
same results are obtained from both the Tobit and Probit model,
suggesting that
implementation of the dynamic enforcement model can reduce both
noncompliance rate and
the magnitude of noncompliance, should they decide not to comply
with the rule. Thus, the
leverage postulated by Harrington is evident and results in
lower noncompliance. In
addition, the enforcement cost is also lower in the dynamic
model relative to the static
10 The statistics for the F-test that both marginal cost and
Individual Shock are jointly insignificant has a p-value of
0.992111 Subjects were asked to rate their own risk aversion in the
questionnaire at the end of the experiment. As a
form of robustness check, these variables were calculated. As
would be expected with randomization, therewas no significant
differences for these variables across the different sessions.
Hence, any changes in thedependent variables can be attributed to
the explanatory variables being tested.
-
8/7/2019 SCAPE Working Paper 1 AC&TH
19/25
19
Table 8 Random effect Tobit model on trading efficiency
Explanatory Variables
Dependent Variables: Tobit Model
(Upper Limit =1)
Model 6 Model 7
Trading Efficiency Trading Efficiency
Dynamic Compliance Model - 1.6959 (0.3606) ** - 1.7001 (0.3591)
**Uniform Allocation - 2.7718 (0.3796) ** - 2.7772 (0.3772) **
Individual Shock 0.0092 (0.0734)Marginal Cost 0.000056
(0.0112)
Mean Pricea - 0.0457 (0.0235) -0.0466 (0.0223) *
Constant 5.4289 (2.7678) * 5.5203 (2.171)Observations 512
512Number of Subjects 64 64Wald Chi-Squared (5) 74.48Prob > Wald
Chi-Squared (5) 0.0000
Wald Chi-Squared (3) 74.47
Prob > Wald Chi-Squared (3) 0.00001.Standard error in
parenthesis.2.*: denote significant at the 5% level using a two
tailed test.3.**: denote significant at the 1 % level using a two
tailed test.4.a Estimated using IV method
model in the experiment due to the lower rate of monitoring in
the good inspection group,
G1 Hence, a change from the static model to the dynamic
enforcement model increases
compliance without incurring higher enforcement costs.
Hypothesis 5, which states that noncompliance is not different
for agents in the two
different allocations, is rejected at the 1% level of
significance for the Probit model but not
rejected in the Tobit model. Our data shows that a uniform
allocation will decrease the
probability of agents complying by approximately 15 percent and
18 percent for actual
abatement violations and report violations respectively.
However, it has no impact on the
magnitude of noncompliance should they decide to violate the
rules.
Hypothesis 6 is also rejected at the 1% level of significance as
there is evidence that
a uniform allocation decreases the trading efficiency relative
to a non uniform allocation.
Studies have attributed this change in trading efficiency to
market power (Maloney and
Yandle, 1984; Cason, Gangadharan and Duke, 2003). Previous
experiments which studied
on market power defined it in terms of the number of buyers and
sellers (Cason,
Gangadharan and Duke, 2003). Using this definition, this effect
of market power is
eliminated in our experiment as there were 4 buyers and 4
sellers in all sessions.
Results from the regression model also support the other
hypotheses that higher
permit prices and higher individual emission shocks increase
noncompliance. Theories have
-
8/7/2019 SCAPE Working Paper 1 AC&TH
20/25
20
attributed this linkage to an increase in the cost of compliance
(Stranlund and Dhanda,
2004). This was also observed in our experiment.
6. Conclusion
6.1 Reconciling conflicting principles
The ETS is a market-based policy to solve the externality
problem of greenhouse
gases emission. However, the efficiency of this scheme is
crucially dependent on many
design features. In this study, features related to the maritime
industry were studied using an
experimental approach. The unique characteristics of an ETS for
the maritime industry are
first identified before developing a stylized experimental model
that incorporates these
features. Thus, the results obtained have high external validity
and are useful for industries
or countries other than the maritime sector.
In particular, two factors that are of concern to the maritime
industry were further
examined. The first objective was to test the impact of the
dynamic enforcement model on
noncompliance relative to the baseline static enforcement model.
We found strong
experimental evidence that implementation of the dynamic
enforcement model reduces
noncompliance. This result has strong implications for the
maritime industry. Due to
numerous reasons, high noncompliance is one problem for the
potential ETS in the industry.
Due to the global scope of this potential ETS, increasing
monitoring efforts is likely to incur
high costs. Thus, this study proposes that the industry can
introduce a system similar to the
Harrington dynamic enforcement model. This model allows the IMO
to react to the
previous actions of the shipping firms by classifying them into
one of the two inspection
groups. Having such a system could potentially reduce
noncompliances with the same
enforcement budget. To adhere to the organizations main
principle of treating all ships
equally, IMO can increase the transparency of the scheme by
announcing and providing
reasons for the classification of shipping lines into the two
inspection groups.Next, the initial allocation of permits is a
potential solution to the schemes need to
reconcile two conflicting principles. While IMO advocates
equality towards all ships,
UNFCCC principle is one of heterogeneous treatment for ships
(common but differentiated
responsibility). This is one problem that is currently impeding
the implantation of such a
scheme. Thus, an initial allocation where non Annex I countries
are given more permits, is
one possible solution to adhere to the UNFCCC principle.
Conventional models have
indicated that pre-trading allocations affect only equity but
not efficiency (Kerr, 1999). Our
results are inconsistent with these theories as we find that the
allocation method impacts on
-
8/7/2019 SCAPE Working Paper 1 AC&TH
21/25
21
noncompliance and trading efficiency. More specifically, a non
uniform allocation, which is
based on the UNFCCC principle, increases trading efficiency.
Thus, the initial allocation of
permits affects the efficiency of the scheme and this effect
should not be overlooked by the
IMO in their allocation of permits to the firms.
6.2 Limitation of Research
The analysis in this study faces several limitations which
future researches can be
based upon. Although the model was developed to reflect the
situation in the maritime
sector, the specific principle behind the two allocation
treatment was kept general. Future
experimental research could isolate the specific allocation
feature for a further examination
on this topic. Next, modeling after particular proposals to the
IMO MEPC can also be done
to evaluate the feasibility of these proposals. An alternative
perspective would be to perform
comparisons of ETS with other market-based environmental
instruments such as carbon tax
to determine the most optimal instrument for the industry.
The second limitation is the number of periods in each session.
As firms in most
ETS participate in the scheme infinitely, the number of periods
should be increased to
reflect this aspect. Thus, further research can explore this
possibility and determine if this
has a qualitative impact on the result. The third limitation is
the possibility of confounding
factors in the experiment. This can lead to biasness in the
results obtained and is a concern
in all experiments. In this study, care has been taken to
randomize all possible elements of
the procedure to eliminate this effect. The questions on
subjects risk aversion also shows
no significant different across the sessions.
As there is currently a lack of literature on an ETS for the
maritime industry, this
study takes on a wider approach to incorporate more factors.
This will hopefully motivate
further research into this field. With the increasing call for a
market-based environmental
tool to complement the sectors technological efforts to clean up
emissions, more in-depth
researches on this field would certainly be useful to the
IMO.
-
8/7/2019 SCAPE Working Paper 1 AC&TH
22/25
References
Arora, S. and Cason, T. (1996), Why do Firms Volunteer to Exceed
Environmental Regulations?Understanding Participation in EPAs 33/50
Program, Land Economics, 72(4), 413-432.
Bardsley, N., Cubitt, R., Loomes, G., Moffatt, P., Starmer, C.
and Sugden, R. (2009)Experimental Economics: Rethinking the Rules,
Princeton University Press.Buckley, N.J., Mestelman, S., Muller,
R.A. (2007) Baseline-and-credit emission permit
trading:experimental evidence under variable output capacity, In:
Cherry, T., Kroll S, Shogren J (eds)Experimental methods in
environmental economics, Routledge Press, New York.Carlson, D.A.
and Sholtz, A.M. (1994) Designing Pollution Market Instruments:
Cases ofUncertainty, Contemporary Economic Policy, Western Economic
Association International, vol.12(4), October, 114-125,
Cason, T. (2010) What Can Laboratory Experiments Teach Us About
Emissions Permit MarketDesign? Agricultural and Resource Economics
Review, 39, forthcoming.Cason, T., Gangadharan, L. and Duke, C.,
(2003), Market Power in Tradable Emission Markets:A Laboratory
Testbed for Emission Trading in Port Phillip Bay, Victoria, 2003
Conference(47th), February 12-14, 2003, Fremantle, Australia 57841,
Australian Agricultural andResource Economics Society.Cason, T. and
Gangadharan, L. (2004) An Experimental Study of Compliance and
Leverage inAuditing and Regulatory Enforcement, Department of
Economics - Working Studys Series 918,The University of
Melbourne.Cason, T. and Gangadharan, L. (2006). Emissions
variability in tradable permit markets withimperfect enforcement
and banking, Journal of Economic Behavior & Organization, vol.
61(2),October, 199-216.Clark, J., Friesen, L. and Muller, A. (2004)
The Good, the Bad, and the Regulator: AnExperimental Test of Two
Conditional Audit Schemes, Economic Inquiry, Oxford
UniversityPress, vol. 42(1), January, 69-87.Dales, J.H. (1968)
Land, Water, and Ownership, The Canadian Journal of
Economics,1(4):791-804.Dasgupta, S., Laplante, B. and Mamingi, N.
(1997) Pollution and Capital Markets inDeveloping Countries,
Journal of Environmental Economics and Management, Volume 42,Issue
3, November 2001, 310-335.Gangadharan, L. (2001) Compliance in
Environmental Markets, Applied Economics Letters,Volume 8, Issue
10, October 2001, 641-644.
-
8/7/2019 SCAPE Working Paper 1 AC&TH
23/25
-
8/7/2019 SCAPE Working Paper 1 AC&TH
24/25
24
Commission DG XI, Designing Options for Implementing an
Emissions Trading Regime forGreenhouse Gases in the EC, Washington,
Center for Clean Air Policy (CCAP).Linder, S. H. and McBride, M.E.
(1984) Enforcement costs and regulatory reform: The agencyand firm
response, Journal of Environmental Economics and Management, vol.
11(4),
December, 327-346.Malik, A.S. (1990) Markets for Pollution
Control when Firms are Noncompliant. JournalEnvironmental Economics
and Management18(2), 97-106.Maloney, M.T. and Yandle, B. (1984)
Estimation of the cost of air pollution control regulation,Journal
of Environmental Economics and Management, vol. 11(3), pages
244-263, September.Montgomery, W. D. 1972. Markets in Licenses and
Efficient Pollution Control Programs.Journal of Economic Theory
5(3) 395-418.
Muller, R.A. (1999) Experimental Methods for Research into
Trading of Greenhouse GasEmissions, Department of Economics Working
Studys 1999-14, McMaster University.Salop, S. and Scheffman, D.
(1983) Raising Rivals Costs, American Economic Review
73(2),267-271.Smith, V. (1981) An Empirical Study of Decentralized
Institutions of Monopoly Restraint, Essays in Contemporary Fields
of Economics, Horwich, G. and Quirk, J. (eds), PurdueUniversity
Press.Stranlund, J., Costello, C. and Chavez, C. (2005) Enforcing
Emissions Trading WhenEmissions Permits are Bankable, Journal of
Regulatory Economics 28(2), 181204.Stranlund, J.K. and Dhanda, K.K.
(1999) Endogenous Monitoring and Enforcement of aTransferable
Emissions Permit System, Journal of Environmental Economics and
Management,vol. 38(3), November, 267-282.Stranlund, J. and Murphy,
J.J. (2005) A Laboratory Investigation of Compliance Behaviorunder
Tradable Emissions Rights: Implications for Targeted Enforcement,
University ofMassachusetts, Amherst Resource Economics Working
Study, No. 2005-1.Stranlund, J., Murphy, J.J. and Spraggon, J.
(2008) Imperfect Enforcement of EmissionsTrading and Industry
Welfare: A Laboratory Investigation, University of
MassachusettsAmherst Department of Resource Economics Working
Study, No. 2008-1.Stranlund, J. and Murphy, J.J. (2004) Direct and
Market Effects of Enforcing EmissionsTrading Programs: An
Experimental Analysis, University of Massachusetts, Amherst
ResourceEconomics Working Study, No. 2004-5, Apr.Stopford, M.
(2009) Maritime Economics, 3rd Edition, Routledge, London
-
8/7/2019 SCAPE Working Paper 1 AC&TH
25/25
25
United Nations Framework Convention on Climate Change, (1997a)
Full Text of theConvention, article, Retrieved March 19, 2010
fromhttp://unfccc.int/essential_background/convention/background/items/1355.php.United
Nations Framework Convention on Climate Change, (1997b) Full Text
of the
Convention, article, Retrieved March 19, 2010
fromhttp://unfccc.int/parties_and_observers/items/2704.phpFischbacher,
U. (2007) z-Tree: Zurich Toolbox for Ready-made Economic
Experiments,Experimental Economics 10(2), 171-178.