Embed Size (px)
Citation preview

Introduction Flow Lie groups Push-forward and pull-back The Lie derivative and bracket Lie algebras
SC 618: Flows, derivatives and brackets
Ravi N [email protected] 1
1Systems and Control Engineering,IIT Bombay, India
Geometric MechanicsMonsoon 2014
September 15, 2014
Lectures 3, 4 and 5 SC 618

Introduction Flow Lie groups Push-forward and pull-back The Lie derivative and bracket Lie algebras
Outline
1 Linear and nonlinear systems
2 The flow of a vector field
3 Lie groups
4 Push-forward and pull-back
5 The Lie derivative and the Jacobi-Lie bracket
6 Lie algebras
Lectures 3, 4 and 5 SC 618

Introduction Flow Lie groups Push-forward and pull-back The Lie derivative and bracket Lie algebras
Outline
1 Linear and nonlinear systems
2 The flow of a vector field
3 Lie groups
4 Push-forward and pull-back
5 The Lie derivative and the Jacobi-Lie bracket
6 Lie algebras
Lectures 3, 4 and 5 SC 618

Introduction Flow Lie groups Push-forward and pull-back The Lie derivative and bracket Lie algebras
Linear systems - preliminaries
A linear system with an input
x = Ax+Bu x(t) ∈ Rn
x(t) lives in Rn, a vector space.
A linear autonomous system
x = Ax, x(t) ∈ Rn
x(t) lives in Rn, a vector space.
The right-hand side of the differential equation is termed a vector field. Forthe linear system, it is a linear vector field.Linearity
A(α1x1 + α2x2) = α1Ax1 + α2Ax2
Lectures 3, 4 and 5 SC 618

Introduction Flow Lie groups Push-forward and pull-back The Lie derivative and bracket Lie algebras
Linear systems - preliminaries
A linear system with an input
x = Ax+Bu x(t) ∈ Rn
x(t) lives in Rn, a vector space.
A linear autonomous system
x = Ax, x(t) ∈ Rn
x(t) lives in Rn, a vector space.The right-hand side of the differential equation is termed a vector field. Forthe linear system, it is a linear vector field.Linearity
A(α1x1 + α2x2) = α1Ax1 + α2Ax2
Lectures 3, 4 and 5 SC 618

Introduction Flow Lie groups Push-forward and pull-back The Lie derivative and bracket Lie algebras
Solution and flow
Solution to the set of differential equations
x(t) = eAtx0, x(0) = x0, eAt4= I +A+A2/2! + . . .
The term eAtx0 is termed the flow associated with the linear vector field Ax.
Lectures 3, 4 and 5 SC 618

Introduction Flow Lie groups Push-forward and pull-back The Lie derivative and bracket Lie algebras
Nonlinear systems - preliminaries
A nonlinear system with an input
x = f(x) + g(x)u x(t) ∈M
f(·), g(·) are smooth functions, x(t) lives in M , a smooth manifold.
A nonlinear autonomous system
x = f(x), x(t) ∈ Rn
x(t) lives in M , a smooth manifold.
The right-hand side of the differential equation is a nonlinear vector field.Linearity does not hold.
f(α1x1 + α2x2) 6= α1f(x1) + α2f(x2)
Lectures 3, 4 and 5 SC 618

Introduction Flow Lie groups Push-forward and pull-back The Lie derivative and bracket Lie algebras
Nonlinear systems - preliminaries
A nonlinear system with an input
x = f(x) + g(x)u x(t) ∈M
f(·), g(·) are smooth functions, x(t) lives in M , a smooth manifold.
A nonlinear autonomous system
x = f(x), x(t) ∈ Rn
x(t) lives in M , a smooth manifold.The right-hand side of the differential equation is a nonlinear vector field.
Linearity does not hold.
f(α1x1 + α2x2) 6= α1f(x1) + α2f(x2)
Lectures 3, 4 and 5 SC 618

Introduction Flow Lie groups Push-forward and pull-back The Lie derivative and bracket Lie algebras
Nonlinear systems - preliminaries
A nonlinear system with an input
x = f(x) + g(x)u x(t) ∈M
f(·), g(·) are smooth functions, x(t) lives in M , a smooth manifold.
A nonlinear autonomous system
x = f(x), x(t) ∈ Rn
x(t) lives in M , a smooth manifold.The right-hand side of the differential equation is a nonlinear vector field.Linearity does not hold.
f(α1x1 + α2x2) 6= α1f(x1) + α2f(x2)
Lectures 3, 4 and 5 SC 618

Introduction Flow Lie groups Push-forward and pull-back The Lie derivative and bracket Lie algebras
Solution and flow
Solution to the set of differential equations
x(t) = Φ(t, x0) x(0) = x0
The term Φ(t, x0) is termed the flow associated with the nonlinear vectorfield f(x).
Lectures 3, 4 and 5 SC 618

Introduction Flow Lie groups Push-forward and pull-back The Lie derivative and bracket Lie algebras
Outline
1 Linear and nonlinear systems
2 The flow of a vector field
3 Lie groups
4 Push-forward and pull-back
5 The Lie derivative and the Jacobi-Lie bracket
6 Lie algebras
Lectures 3, 4 and 5 SC 618

Introduction Flow Lie groups Push-forward and pull-back The Lie derivative and bracket Lie algebras
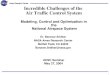
Flow of a vector field
Flow of X(x)
The flow of the vector field X(x), denoted by Φ(t, x0), is a mapping from(−a, a)× U → Rn (where a(> 0) ∈ R and U is an open region in thestate-space ) and satisfies the differential equation
dΦ(t, x0)
dt= X(Φ(t, x0)) ∀t ∈ (−a, a), x(0) = x0 ∈ U.
over the interval (−a, a) and with initial conditions starting in the region U .
Lectures 3, 4 and 5 SC 618

Introduction Flow Lie groups Push-forward and pull-back The Lie derivative and bracket Lie algebras
x0
Φtx0M
Figure: Flow of a vector field
Lectures 3, 4 and 5 SC 618

Introduction Flow Lie groups Push-forward and pull-back The Lie derivative and bracket Lie algebras
Properties of flows
The group structure
DenoteΦt(x0)
4= Φ(t, x0)
The set of transformations {Φt} : U → Rn satisfies the following properties.
• Φt+sx0 = Φt ◦ Φsx0 ∀t, s, t+ s ∈ (−a, a) (the group binary operation.)
• Φ0x0 = x0 (the group identity.)
• For a fixed t ∈ (−a, a) we have ΦtΦ−tx0 = x0 ⇒ [Φt]−1 = Φ−t
(existence of an inverse.)
Lectures 3, 4 and 5 SC 618

Introduction Flow Lie groups Push-forward and pull-back The Lie derivative and bracket Lie algebras
The flow of a linear system
The group property
RemarkThe three properties mentioned above impart a group structure to the set{Φt}. This set is called a one-parameter (time) group of diffeomorphisms(Φt and its inverse are smooth mappings).
Linear flow
RemarkFor a linear system described by
x = Ax A ∈ Rn×n
the flow Φtx0 = eAtx0 where {eAt : t ∈ (−∞,∞)} constitutes theone-parameter group of diffeomorphisms.
Lectures 3, 4 and 5 SC 618

Introduction Flow Lie groups Push-forward and pull-back The Lie derivative and bracket Lie algebras
The flow of a linear system
The group property
RemarkThe three properties mentioned above impart a group structure to the set{Φt}. This set is called a one-parameter (time) group of diffeomorphisms(Φt and its inverse are smooth mappings).
Linear flow
RemarkFor a linear system described by
x = Ax A ∈ Rn×n
the flow Φtx0 = eAtx0 where {eAt : t ∈ (−∞,∞)} constitutes theone-parameter group of diffeomorphisms.
Lectures 3, 4 and 5 SC 618

Introduction Flow Lie groups Push-forward and pull-back The Lie derivative and bracket Lie algebras
Outline
1 Linear and nonlinear systems
2 The flow of a vector field
3 Lie groups
4 Push-forward and pull-back
5 The Lie derivative and the Jacobi-Lie bracket
6 Lie algebras
Lectures 3, 4 and 5 SC 618

Introduction Flow Lie groups Push-forward and pull-back The Lie derivative and bracket Lie algebras
A group
DefinitionA group is a set G with a binary operation + such that
• For any x, y ∈ G, x+ y ∈ G (Closure) and (x+ y) + z = x+ (y + z)(Associativity)
• There exists a unique i ∈ G such that x+ i = i+ x = x for every x ∈ G(Existence of the identity element)
• For every x ∈ G there exists a unique y ∈ G such that x+ y = i.(Existence of inverse)
Lectures 3, 4 and 5 SC 618

Introduction Flow Lie groups Push-forward and pull-back The Lie derivative and bracket Lie algebras
A Lie group
DefinitionA smooth manifold M together with a group structure is called a Lie groupG if the group operation + is smooth.
(g, h)→ g + h (∀g, h ∈ G) is smooth
• The identity element of the Lie group is usually denoted by e.
• Left translation of a group
Lg : G→ G h→ g + h
• Right translation of a group
Rg : G→ G h→ h+ g
Lectures 3, 4 and 5 SC 618

Introduction Flow Lie groups Push-forward and pull-back The Lie derivative and bracket Lie algebras
Examples of Lie groups
• R or multiple copies of R (as Rn) with the bianry operation being theusual component-wise addition +.
• The unit circle S1 with elements denoted as θ(∈ [0, 2π) and the binaryoperation being the usual addition. Similarly, multiple copies of S1 (asS1 × . . .× S1).
• The set of n× n invertible matrices with real entries with the binaryoperation being matrix multiplication. This group is called GL(n,R).
• The set of n× n real-orthogonal matricesO(n), asubsetofGL(n,R).Thesetofn ×n rotation matrices SO(n), asubset of O(n,R).
Lectures 3, 4 and 5 SC 618

Introduction Flow Lie groups Push-forward and pull-back The Lie derivative and bracket Lie algebras
Rigid body motion
DefinitionRigid body motion is characterized by two properties
•• The distance between any two points remains invariant
• The orientation of the body is preserved. (A right-handed coordinatesystem remains right-handed)
Lectures 3, 4 and 5 SC 618

Introduction Flow Lie groups Push-forward and pull-back The Lie derivative and bracket Lie algebras
SO(3) and SE(3)
• Two groups which are of particular interest to us in mechanics andcontrol are SO(3) - the special orthogonal group that representsrotations - and SE(3) - the special Euclidean group that representsrigid body motions. These are Lie groups.
• Elements of SO(3) are represented as 3× 3 real matrices and satisfy
RTR = I
with det(R) = 1.
• An element of SE(3) is of the form (p,R) where p ∈ R3 and R ∈ SO(3).
Lectures 3, 4 and 5 SC 618

Introduction Flow Lie groups Push-forward and pull-back The Lie derivative and bracket Lie algebras
Frames of reference or coordinate frames
• In describing rigid body motions we always fix two frames of reference.One is called the body frame that remains fixed to the body and theother is the inertial frame that remains fixed in inertial space.
y
x
z
A
B
gab
z
x
y
pab
qb
qa
a
a
a
b
b
b
Figure: Rigid body motion
Lectures 3, 4 and 5 SC 618

Introduction Flow Lie groups Push-forward and pull-back The Lie derivative and bracket Lie algebras
Rigid body motions and groups
• Suppose qa and qb are coordinates of a point q relative to frames A andB, respectively.
qa = pab +Rabqb
Here pab represents the position of the origin of the frame B withrespect to frame A in frame A coordinates and Rab is the orientation offrame B with respect to frame A .
• Appending a ”1” to the coordinates of a point ( to render the groupoperation as the usual matrix multiplication)
qa =
(qa1
)=
(Rab pab0 1
)(qb1
)= gabqb
Lectures 3, 4 and 5 SC 618

Introduction Flow Lie groups Push-forward and pull-back The Lie derivative and bracket Lie algebras
Two results on rotations
Rotation in a plane
ClaimThe rotation group SO(2) can be identified with S1 (the unit circle).
Proof:S1 = {x ∈ R2 : ‖x‖ = 1}
Parametrize the elements of S1 in terms of θ ∈ [0, 2π]. For each θ ∈ [0, 2π],the counter-clockwise rotation of the vectors {(1, 0), (0, 1)} in R2 (theseform a basis) by the angle θ
(1, 0)→(cos θ sin θ) (0, 1)→(− sin θ cos θ)
is given by the matrix
Rθ =
[cos θ − sin θsin θ cos θ
]which is an element of SO(2).
Lectures 3, 4 and 5 SC 618

Introduction Flow Lie groups Push-forward and pull-back The Lie derivative and bracket Lie algebras
Proof (contd.)
Conversely, take an element of SO(2) of the form
R =
[a1 a2
a3 a4
]Then from the properties of an element of SO(2), we have
a1a4 − a2a3 = 1; a21 + a2
3 = 1; a22 + a2
4 = 1; a1a2 + a3a4 = 0
It is possible to find a θ ∈ [0, 2π] such that that R can be represented in theform Rθ.
Lectures 3, 4 and 5 SC 618

Introduction Flow Lie groups Push-forward and pull-back The Lie derivative and bracket Lie algebras
Euler’s theorem
Theorem(Euler’s theorem)Every A ∈ SO(3) is a rotation through an angle θ ∈ S1 about an axisω ∈ R3.
Proof: Since 1 is an eigen value of A, we have Aw = w where w ∈ R3 is aneigen vector. Choose two vectors e1 and e2 that are orthogonal to eachother as well as w. So
< w, e1 >= 0, < w, e2 >= 0, < e1, e2 >= 0
The two vectors {e1, e2} lie in the plane perpendicular to w and it followsthat {w, e1, e2} form a basis for R3. Since A is orthogonal, the matrix of Ain this basis is of the form 1 0 0
0 a1 a3
0 a2 a4
.
Lectures 3, 4 and 5 SC 618

Introduction Flow Lie groups Push-forward and pull-back The Lie derivative and bracket Lie algebras
Proof (contd.)
(why ?) Now [a1 a3
a2 a4
]is an element of SO(2) and hence there exists a θ ∈ [0, 2π] such that[
a1 a3
a2 a4
]=
[cos θ − sin θsin θ cos θ
]It follows that A is a rotation about w through the angle θ .
Lectures 3, 4 and 5 SC 618

Introduction Flow Lie groups Push-forward and pull-back The Lie derivative and bracket Lie algebras
Outline
1 Linear and nonlinear systems
2 The flow of a vector field
3 Lie groups
4 Push-forward and pull-back
5 The Lie derivative and the Jacobi-Lie bracket
6 Lie algebras
Lectures 3, 4 and 5 SC 618

Introduction Flow Lie groups Push-forward and pull-back The Lie derivative and bracket Lie algebras
The ”star” map (f∗) associated with a smooth function f
Consider a smooth map f : X → Y . At each p ∈ X we define a lineartransformation as follows
f∗p : Tp(X)→ Tf(p)(Y )
called the derivative of f at p, which is intended to serve as a ”linearapproximation to f near p,”. Visualize this as follows.
• Choose a parametrized curve c(·) : (−ε, ε)→ X with c(0) = p anddcdt|t=0 = vp.
• Construct the curve f ◦ c. Then define
f∗p(vp)4= Tpf · vp =
d
dt|t=0(f ◦ c)(t)
• The rank of f at p is the rank of the Jacobian matrix at x(p) and thisis independent of the choice of coordinates x.
Lectures 3, 4 and 5 SC 618

Introduction Flow Lie groups Push-forward and pull-back The Lie derivative and bracket Lie algebras
Push-forward and pull-back of a function
Figure: Pull-back and push-forward of functions
Lectures 3, 4 and 5 SC 618

Introduction Flow Lie groups Push-forward and pull-back The Lie derivative and bracket Lie algebras
Push-forward and pull-back of a function
• Suppose X is a vector field on M and f : M → R is a smooth function.Then the push-forward of the function f on M by the flow of X is thefunction Φt∗f defined by
(Φt∗f)(x)4= f ◦ Φ−1
t (x) ∀x ∈M
• Suppose X is a vector field on M and f : M → R is a smooth function.Then the pull-back of the function f on M by the flow of X is thefunction Φ∗t f defined by
(Φ∗t f)(x)4= f ◦ Φt(x) ∀x ∈M
Lectures 3, 4 and 5 SC 618

Introduction Flow Lie groups Push-forward and pull-back The Lie derivative and bracket Lie algebras
Push-forward and pull-back of a vector field
Figure: Pull-back and push-forward of vector fields
Lectures 3, 4 and 5 SC 618

Introduction Flow Lie groups Push-forward and pull-back The Lie derivative and bracket Lie algebras
Push-forward of a vector field by another vector field
Push-forward
• Suppose Φt : M →M is the flow associated with a vector field X, thenthe push-forward of a vector field Y on M by f is the vector field(Φt∗Y ) on M defined by
(Φt∗Y )(x) = T(Φ−1
t x)[Y (Φ−1
t x)] ∀x ∈M
• In coordinates(Φt∗Y )(x) = (DΦt)(Y (Φ−1
t x))
Lectures 3, 4 and 5 SC 618

Introduction Flow Lie groups Push-forward and pull-back The Lie derivative and bracket Lie algebras
Push forward of vector fields under a diffeomorphism f
M N
f
Vector Field X
TM
Vector Field f∗X
TN
f∗
Figure: Push-forward
Lectures 3, 4 and 5 SC 618

Introduction Flow Lie groups Push-forward and pull-back The Lie derivative and bracket Lie algebras
Push-forward of vector fields under a diffeomorphism f
Push-forward
• Suppose f : M → N is a diffeomorphism, then the push-forward of avector field X on M by f is the vector field f∗X on N defined by
(f∗X)(f(x)) = Txf(X(x)) ∀x ∈M
• In coordinates
y = f(x) (f∗X)(y) = Df(x).X(x) =dy
dx·X(x)
Lectures 3, 4 and 5 SC 618

Introduction Flow Lie groups Push-forward and pull-back The Lie derivative and bracket Lie algebras
Pull back of a vector field under a diffeomorphism f
M N
f
Vector Field f ∗Y
TM
Vector Field Y
TN
f ∗
Figure: Pull-back
Lectures 3, 4 and 5 SC 618

Introduction Flow Lie groups Push-forward and pull-back The Lie derivative and bracket Lie algebras
Pull-back of vector fields under a diffeomorphism f
The pull-back
• Suppose f : M → N is a diffeomorphism, then the pull-back of a vectorfield Y on N by f is the vector field f∗Y on M defined by
f∗Y = (f−1)∗Y = Tf−1 ◦ Y ◦ f
• In coordinates
y = f(x) (f∗X)(y) = Df(x).X(x) =dy
dx·X(x)
Lectures 3, 4 and 5 SC 618

Introduction Flow Lie groups Push-forward and pull-back The Lie derivative and bracket Lie algebras
Outline
1 Linear and nonlinear systems
2 The flow of a vector field
3 Lie groups
4 Push-forward and pull-back
5 The Lie derivative and the Jacobi-Lie bracket
6 Lie algebras
Lectures 3, 4 and 5 SC 618

Introduction Flow Lie groups Push-forward and pull-back The Lie derivative and bracket Lie algebras
Operations on vector fields
The GradientConsider a smooth function g(·) : U → R. The gradient of such a function,denoted by ∇g, is defined as
∇g(x) =[
∂g∂x1
· · · ∂g∂xn
]alternate notation: grad(g).
Lectures 3, 4 and 5 SC 618

Introduction Flow Lie groups Push-forward and pull-back The Lie derivative and bracket Lie algebras
The Lie derivative of a function
The Lie derivativeThe Lie derivative of a function f along X is
(LXf)(x) =d
dt|t=0(Φ∗t f)(x) =
d
dt|t=0f ◦ Φt(x)
In coordinates we have the familiar
(LXf)(x) =[
∂f∂x1
· · · ∂f∂xn
]X(x)
Alternate notation
(Xf)(x) =d
dt|t=0f ◦ Φt(x) = lim
t→0
f(Φt(x))− f(x)
t
Lectures 3, 4 and 5 SC 618

Introduction Flow Lie groups Push-forward and pull-back The Lie derivative and bracket Lie algebras
The Lie derivative of a function
The Lie derivativeThe Lie derivative of a function f along X is
(LXf)(x) =d
dt|t=0(Φ∗t f)(x) =
d
dt|t=0f ◦ Φt(x)
In coordinates we have the familiar
(LXf)(x) =[
∂f∂x1
· · · ∂f∂xn
]X(x)
Alternate notation
(Xf)(x) =d
dt|t=0f ◦ Φt(x) = lim
t→0
f(Φt(x))− f(x)
t
Lectures 3, 4 and 5 SC 618

Introduction Flow Lie groups Push-forward and pull-back The Lie derivative and bracket Lie algebras
High school physics
The cross product
• Vector space R3 and the cross-product operation ×.• (α1a1 + α2a2) × b = α1(a1 × b1) + α2(a2 × b2) - linearity. (holds in the
second argument as well.)• a× b = −b× a - skew-commutative.• a× (b× c) + c× (a× b) + b× (c× a) = 0 - the Jacobi-Lie identity.
Comment: the cross-product of two linearly independent vectors in R3
yields a vector in a new direction.
An alternate notation
a× b↔ ab a =
0 −a3 a2
a3 0 −a1
−a2 a1 0
Lectures 3, 4 and 5 SC 618

Introduction Flow Lie groups Push-forward and pull-back The Lie derivative and bracket Lie algebras
High school physics
The cross product
• Vector space R3 and the cross-product operation ×.• (α1a1 + α2a2) × b = α1(a1 × b1) + α2(a2 × b2) - linearity. (holds in the
second argument as well.)• a× b = −b× a - skew-commutative.• a× (b× c) + c× (a× b) + b× (c× a) = 0 - the Jacobi-Lie identity.
Comment: the cross-product of two linearly independent vectors in R3
yields a vector in a new direction.
An alternate notation
a× b↔ ab a =
0 −a3 a2
a3 0 −a1
−a2 a1 0
Lectures 3, 4 and 5 SC 618

Introduction Flow Lie groups Push-forward and pull-back The Lie derivative and bracket Lie algebras
The Lie derivative of a vector field
The pull back of a vector field
The Lie derivative of Y along X is
LXY4=
d
dt|t=0Φ∗tY
where Φ is the flow of X.
Explicitly
(LXY )(x) =d
dt|t=0(DΦt(x))−1 · Y (Φt(x))
The Lie bracketIn coordinates we have the familiar expression
d
dt|t=0(DΦt(x))−1 · Y (Φt(x)) =
∂Y
∂xX(x)− ∂X
∂xY (x) = [X,Y ](x)
Lectures 3, 4 and 5 SC 618

Introduction Flow Lie groups Push-forward and pull-back The Lie derivative and bracket Lie algebras
The Lie derivative of a vector field
The pull back of a vector field
The Lie derivative of Y along X is
LXY4=
d
dt|t=0Φ∗tY
where Φ is the flow of X.Explicitly
(LXY )(x) =d
dt|t=0(DΦt(x))−1 · Y (Φt(x))
The Lie bracketIn coordinates we have the familiar expression
d
dt|t=0(DΦt(x))−1 · Y (Φt(x)) =
∂Y
∂xX(x)− ∂X
∂xY (x) = [X,Y ](x)
Lectures 3, 4 and 5 SC 618

Introduction Flow Lie groups Push-forward and pull-back The Lie derivative and bracket Lie algebras
Operation on vector fields
The Jacobi-Lie bracketThe Jacobi-Lie bracket of two vector fields is an operation between twovector fields that yields another vector field. For two vector fields X and Y ,both defined from U to Rn, it is defined as
[X,Y ] = (LXY ) = (DY ) ·X − (DX) · Y
and satisfies the following properties (for any three vector fields X,Y, Z)
• [αX + βY, Z] = α[X,Z] + β[Y,Z] - linearity in the first argument (alsohold for the second argument)
• [X,Y ] = −[Y,X] - skew-commutative.
• [X, [Y,Z]] + [Z, [X,Y ]] + [Y, [X,Z]] = 0 - the Jacobi-Lie identity
Lectures 3, 4 and 5 SC 618

Introduction Flow Lie groups Push-forward and pull-back The Lie derivative and bracket Lie algebras
More properties
The Jacobi-Lie bracketLet X generate the flow {Φt} and Y generate the flow {Ψt}. Then[X,Y ] = 0 if and only if Φt ◦Ψs = Ψs ◦ Φt for all s, t ∈ R.
Lectures 3, 4 and 5 SC 618

Introduction Flow Lie groups Push-forward and pull-back The Lie derivative and bracket Lie algebras
Outline
1 Linear and nonlinear systems
2 The flow of a vector field
3 Lie groups
4 Push-forward and pull-back
5 The Lie derivative and the Jacobi-Lie bracket
6 Lie algebras
Lectures 3, 4 and 5 SC 618

Introduction Flow Lie groups Push-forward and pull-back The Lie derivative and bracket Lie algebras
The Lie algebra - so(3)
3 × 3 skew-symmetric matrices
Recall
ω × x↔ ωx ω =
0 −ω3 ω2
ω3 0 −ω1
−ω2 ω1 0
The eigen values of ω are 0,±‖ω‖ i (Hint: The trace of a matrix is the sumof its eigen values.)
ClaimExponential of a skew-symmetric matrix is a rotation matrix
To show eω ∈ SO(3)
(eω)(eω)T = (e(ω−ω)) = I⇒ det(eω) = ±1
Now from ω = 0, eω = I and det(I) = 1. The determinant is a continuousfunction of the elements of the matrix
⇒ det(eω) = 1
Lectures 3, 4 and 5 SC 618

Introduction Flow Lie groups Push-forward and pull-back The Lie derivative and bracket Lie algebras
Properties of the Lie algebra - so(3)
It is a vector space of dimension 3.The tangent space of the identity of SO(3) i. e. Te SO(3) = so(3).The bracket operation [·, ·] : so(3)× so(3)→ so(3) satisfies
• [αx+ βy, z] = α[x, z] + β[y, z] - linearity in the first argument (alsohold for the second argument)
• [x, z] = −[z, x] - skew-commutative.
• [x, [y, z]] + [z, [x, y]] + [y, [z, x]] = 0 - the Jacobi-Lie identity
Notice that the cross product relates as
[x, z] = x× z
Lectures 3, 4 and 5 SC 618