Upload
others
View
6
Download
0
Embed Size (px)
Citation preview
Dennis Roddy i
Satellite CommunicationsDennis Roddy
Fourth Edition
McGraw-HillNew York Chicago San Francisco Lisbon London Madrid Mexico City Milan New
Delhi San Juan Seoul Singapore Sydney Toronto
Dennis Roddy ii
CIP Data is on file with the Library of Congress
Copyright © 2006, 2001, 1996 by The McGraw-Hill Companies, Inc.
All rights reserved. Printed in the United States of America. Except as permitted under the United States Copyright Act of1976, no part of this publication may be reproduced or distributed in any form or by any means, or stored in a data base orretrieval system, without the prior written permission of the publisher.
1 2 3 4 5 6 7 8 9 0 DOC/DOC 0 1 2 1 0 9 8 7 6
ISBN 0-07-146298-8
The sponsoring editor for this book was Stephen S. Chapman and the production supervisor was Richard C. Ruzycka. Itwas set in Century Schoolbook by International Typesetting and Composition. The art director for the cover wasAnthony Landi.
Printed and bound by RR Donnelley.
The first edition of this book was published by Prentice-Hall Inc.,copyright © 1989.
McGraw-Hill books are available at special quantity discounts to use as premiums and sales promotions, or for use incorporate training programs. For more information, please write to the Director of Special Sales, McGraw-HillProfessional, Two Penn Plaza, New York, NY 10121-2298. Or contact your local bookstore.
This book is printed on recycled, acid-free paper containing a minimum of 50% recycled, de-inked fiber.
Information contained in this work has been obtained by The McGraw-Hill Companies, Inc. (“McGraw-Hill”) fromsources believed to be reliable. However, neither McGraw-Hill nor its authors guarantee the accuracy or completeness ofany information published herein, and neither McGraw-Hill nor its authors shall be responsible for any errors, omissions,or damages arising out of use of this information. This work is published with the understanding that McGraw-Hill and itsauthors are supplying information but are not attempting to render engineering or other professional services. If suchservices are required, the assistance of an appropriate professional should be sought.
Dennis Roddy iii
Contents
Preface xi
Chapter 1. Overview of Satellite Systems 11.1 Introduction 1
1.2 Frequency Allocations for Satellite Services 2
1.3 INTELSAT 4
1.4 U.S. Domsats 9
1.5 Polar Orbiting Satellites 12
1.6 Argos System 18
1.7 Cospas-Sarsat 19
1.8 Problems 25
References 26
Chapter 2. Orbits and Launching Methods 292.1 Introduction 29
2.2 Kepler’s First Law 29
2.3 Kepler’s Second Law 30
2.4 Kepler’s Third Law 31
2.5 Definitions of Terms for Earth-Orbiting Satellites 32
2.6 Orbital Elements 35
2.7 Apogee and Perigee Heights 37
2.8 Orbit Perturbations 38
2.8.1 Effects of a nonspherical earth 38
2.8.2 Atmospheric drag 43
2.9 Inclined Orbits 44
2.9.1 Calendars 45
2.9.2 Universal time 46
2.9.3 Julian dates 47
2.9.4 Sidereal time 49
2.9.5 The orbital plane 50
2.9.6 The geocentric-equatorial coordinate system 54
2.9.7 Earth station referred to the IJK frame 56
2.9.8 The topocentric-horizon coordinate system 62
Dennis Roddy iv
2.9.9 The subsatellite point 64
2.9.10 Predicting satellite position 66
2.10 Local Mean Solar Time and Sun-Synchronous Orbits 66
2.11 Standard Time 70
2.12 Problems 71
References 75
Chapter 3. The Geostationary Orbit 773.1 Introduction 77
3.2 Antenna Look Angles 78
3.3 The Polar Mount Antenna 85
3.4 Limits of Visibility 87
3.5 Near Geostationary Orbits 89
3.6 Earth Eclipse of Satellite 92
3.7 Sun Transit Outage 94
3.8 Launching Orbits 94
3.9 Problems 99
References 101
Chapter 4. Radio Wave Propagation 1034.1 Introduction 103
4.2 Atmospheric Losses 103
4.3 Ionospheric Effects 104
4.4 Rain Attenuation 106
4.5 Other Propagation Impairments 111
4.6 Problems and Exercises 111
References 112
Chapter 5. Polarization 1155.1 Introduction 115
5.2 Antenna Polarization 120
5.3 Polarization of Satellite Signals 123
5.4 Cross-Polarization Discrimination 128
5.5 Ionospheric Depolarization 130
5.6 Rain Depolarization 131
5.7 Ice Depolarization 133
5.8 Problems and Exercises 133
References 136
Chapter 6. Antennas 1376.1 Introduction 137
6.2 Reciprocity Theorem for Antennas 138
6.3 Coordinate System 139
6.4 The Radiated Fields 140
6.5 Power Flux Density 144
6.6 The Isotropic Radiator and Antenna Gain 144
Dennis Roddy v
6.7 Radiation Pattern 145
6.8 Beam Solid Angle and Directivity 146
6.9 Effective Aperture 148
6.10 The Half-Wave Dipole 149
6.11 Aperture Antennas 151
6.12 Horn Antennas 155
6.12.1 Conical horn antennas 155
6.12.2 Pyramidal horn antennas 158
6.13 The Parabolic Reflector 159
6.14 The Offset Feed 165
6.15 Double-Reflector Antennas 167
6.15.1 Cassegrain antenna 167
6.15.2 Gregorian antenna 169
6.16 Shaped Reflector Systems 169
6.17 Arrays 172
6.18 Planar Antennas 177
6.19 Planar Arrays 180
6.20 Reflectarrays 187
6.21 Array Switching 188
6.22 Problems and Exercises 193
References 196
Chapter 7. The Space Segment 1997.1 Introduction 199
7.2 The Power Supply 199
7.3 Attitude Control 202
7.3.1 Spinning satellite stabilization 204
7.3.2 Momentum wheel stabilization 206
7.4 Station Keeping 209
7.5 Thermal Control 211
7.6 TT&C Subsystem 212
7.7 Transponders 213
7.7.1 The wideband receiver 215
7.7.2 The input demultiplexer 218
7.7.3 The power amplifier 218
7.8 The Antenna Subsystem 225
7.9 Morelos and Satmex 5 227
7.10 Anik-Satellites 231
7.11 Advanced Tiros-N Spacecraft 232
7.12 Problems and Exercises 235
References 236
Chapter 8. The Earth Segment 2398.1 Introduction 239
8.2 Receive-Only Home TV Systems 239
8.2.1 The outdoor unit 241
8.2.2 The indoor unit for analog (FM) TV 242
8.3 Master Antenna TV System 243
Dennis Roddy vi
8.4 Community Antenna TV System 244
8.5 Transmit-Receive Earth Stations 246
8.6 Problems and Exercises 250
References 251
Chapter 9. Analog Signals 2539.1 Introduction 253
9.2 The Telephone Channel 253
9.3 Single-Sideband Telephony 254
9.4 FDM Telephony 256
9.5 Color Television 258
9.6 Frequency Modulation 265
9.6.1 Limiters 266
9.6.2 Bandwidth 266
9.6.3 FM detector noise and processing gain 269
9.6.4 Signal-to-noise ratio 272
9.6.5 Preemphasis and deemphasis 273
9.6.6 Noise weighting 274
9.6.7 S/N and bandwidth for FDM/FM telephony 276
9.6.8 Signal-to-noise ratio for TV/FM 278
9.7 Problems and Exercises 279
References 281
Chapter 10. Digital Signals 28310.1 Introduction 283
10.2 Digital Baseband Signals 283
10.3 Pulse Code Modulation 288
10.4 Time-Division Multiplexing 292
10.5 Bandwidth Requirements 293
10.6 Digital Carrier Systems 296
10.6.1 Binary phase-shift keying 298
10.6.2 Quadrature phase-shift keying 300
10.6.3 Transmission rate and bandwidth for PSK modulation 302
10.6.4 Bit error rate for PSK modulation 303
10.7 Carrier Recovery Circuits 309
10.8 Bit Timing Recovery 310
10.9 Problems and Exercises 311
References 313
Chapter 11. Error Control Coding 31511.1 Introduction 315
11.2 Linear Block Codes 316
11.3 Cyclic Codes 321
11.3.1 Hamming codes 321
11.3.2 BCH codes 322
11.3.3 Reed-Solomon codes 322
11.4 Convolution Codes 324
11.5 Interleaving 328
11.6 Concatenated Codes 330
Dennis Roddy vii
11.7 Link Parameters Affected by Coding 331
11.8 Coding Gain 333
11.9 Hard Decision and Soft Decision Decoding 334
11.10 Shannon Capacity 336
11.11 Turbo Codes and LDPC Codes 338
11.11.1 Low density parity check (LDPC) codes 341
11.12 Automatic Repeat Request (ARQ) 344
11.13 Problems and Exercises 346
References 348
Chapter12.
The Space Link 351
12.1 Introduction 351
12.2 Equivalent Isotropic Radiated Power 351
12.3 Transmission Losses 352
12.3.1 Free-space transmission 353
12.3.2 Feeder losses 354
12.3.3 Antenna misalignment losses 355
12.3.4 Fixed atmospheric and ionospheric losses 356
12.4 The Link-Power Budget Equation 356
12.5 System Noise 357
12.5.1 Antenna noise 358
12.5.2 Amplifier noise temperature 360
12.5.3 Amplifiers in cascade 361
12.5.4 Noise factor 362
12.5.5 Noise temperature of absorptive networks 363
12.5.6 Overall system noise temperature 365
12.6 Carrier-to-Noise Ratio 366
12.7 The Uplink 367
12.7.1 Saturation flux density 368
12.7.2 Input backoff 370
12.7.3 The earth station HPA 371
12.8 Downlink 371
12.8.1 Output back-off 373
12.8.2 Satellite TWTA output 374
12.9 Effects of Rain 375
12.9.1 Uplink rain-fade margin 377
12.9.2 Downlink rain-fade margin 377
12.10 Combined Uplink and Downlink C/N Ratio 380
12.11 Intermodulation Noise 383
12.12 Inter-Satellite Links 384
12.13 Problems and Exercises 393
References 397
Chapter13.
Interference 399
13.1 Introduction 399
13.2 Interference between Satellite Circuits (B1 and B2 Modes) 401
13.2.1 Downlink 403
13.2.2 Uplink 404
13.2.3 Combined [C/I] due to interference on both uplink anddownlink
405
13.2.4 Antenna gain function 405
Dennis Roddy viii
13.2.5 Passband interference 407
13.2.6 Receiver transfer characteristic 408
13.2.7 Specified interference objectives 409
13.2.8 Protection ratio 410
13.3 Energy Dispersal 411
13.4 Coordination 413
13.4.1 Interference levels 413
13.4.2 Transmission gain 415
13.4.3 Resulting noise-temperature rise 416
13.4.4 Coordination criterion 417
13.4.5 Noise power spectral density 418
13.5 Problems and Exercises 419
References 421
Chapter14.
Satellite Access 423
14.1 Introduction 423
14.2 Single Access 424
14.3 Preassigned FDMA 425
14.4 Demand-Assigned FDMA 430
14.5 Spade System 430
14.6 Bandwidth-Limited and Power-Limited TWT AmplifierOperation
432
14.6.1 FDMA downlink analysis 433
14.7 TDMA 436
14.7.1 Reference burst 440
14.7.2 Preamble and postamble 442
14.7.3 Carrier recovery 443
14.7.4 Network synchronization 444
14.7.5 Unique word detection 448
14.7.6 Traffic data 451
14.7.7 Frame efficiency and channel capacity 451
14.7.8 Preassigned TDMA 452
14.7.9 Demand-assigned TDMA 455
14.7.10 Speech interpolation and prediction 455
14.7.11 Downlink analysis for digital transmission 459
14.7.12 Comparison of uplink power requirements for FDMA andTDMA
461
14.8 On-Board Signal Processing for FDMA/TDM Operation 463
14.9 Satellite-Switched TDMA 467
14.10 Code-Division Multiple Access 472
14.10.1 Direct-sequence spread spectrum 473
14.10.2 The code signal c(t) 473
14.10.3 Acquisition and tracking 477
14.10.4 Spectrum spreading and despreading 478
14.10.5 CDMA throughput 481
14.11 Problems and Exercises 483
References 488
Chapter15.
Satellites in Networks 491
15.1 Introduction 491
15.2 Bandwidth 492
15.3 Network Basics 492
Dennis Roddy ix
15.4 Asynchronous Transfer Mode (ATM) 494
15.4.1 ATM layers 495
15.4.2 ATM networks and interfaces 497
15.4.3 The ATM cell and header 497
15.4.4 ATM switching 499
15.4.5 Permanent and switched virtual circuits 501
15.4.6 ATM bandwidth 501
15.4.7 Quality of service 504
15.5 ATM over Satellite 504
15.6 The Internet 511
15.7 Internet Layers 513
15.8 The TCP Link 516
15.9 Satellite Links and TCP 517
15.10 Enhancing TCP Over Satellite Channels Using StandardMechanisms (RFC-2488)
519
15.11 Requests for Comments 521
15.12 Split TCP Connections 522
15.13 Asymmetric Channels 525
15.14 Proposed Systems 527
15.15 Problems and Exercises 527
References 530
Chapter16.
Direct Broadcast Satellite (DBS) Television 531
16.1 Introduction 531
16.2 Orbital Spacing 531
16.3 Power Rating and Number of Transponders 533
16.4 Frequencies and Polarization 533
16.5 Transponder Capacity 533
16.6 Bit Rates for Digital Television 534
16.7 MPEG Compression Standards 536
16.8 Forward Error Correction (FEC) 541
16.9 The Home Receiver Outdoor Unit (ODU) 542
16.10 The Home Receiver Indoor Unit (IDU) 544
16.11 Downlink Analysis 546
16.12 Uplink 553
16.13 High Definition Television (HDTV) 554
16.13.1 HDTV displays 554
16.14 Video Frequency Bandwidth 555
16.15 Problems and Exercises 557
References 560
Chapter17.
Satellite Mobile and Specialized Services 561
17.1 Introduction 561
17.2 Satellite Mobile Services 562
17.3 VSATs 564
17.4 Radarsat 566
17.5 Global Positioning Satellite System (GPS) 569
17.6 Orbcomm 572
Dennis Roddy x
17.7 Iridium 576
17.8 Problems and Exercises 582
References 583
Appendix A. Answers to Selected Problems 585Appendix B. Conic Sections 591Appendix C. NASA Two-Line Orbital Elements 609Appendix D. Listings of Artificial Satellites 613Appendix E. Illustrating Third-Order Intermodulation Products 615Appendix F. Acronyms 617Appendix G. Logarithmic Units 625
Index 631
Dennis Roddy xi
Preface
As with previous editions, the fourth edition provides broad coverage of satellite communications, whilemaintaining sufficient depth to lay the foundations for more advanced studies. Mathematics is used as adescriptive tool and to obtain numerical results, but lengthy mathematical derivations are avoided. In settingup numerical problems and examples the author has made use of Mathcad™, a computer program, but theworked examples in the text are presented in normal algebraic notation, so that other programs, includingprogrammable calculators can be used.
The main changes compared to the previous edition are as follows. In Chap. 1 the sections on INTELSATand polar orbiting satellites, including environmental and search and rescue, have been updated.Sun-synchronous orbits have been treated in more detail in Chap. 2. A new section on planar antennas andarrays, including reflectarrays, and array switching has been added in Chap. 6. Chapter 8 includes additionaldetails on C-band reception of television signals. In Chap. 11, a more detailed description is given of linearblock codes, and new sections on the Shannon capacity and turbo and low density parity check (LDPC) codeshave been included. Chapter 12 has a new section on intersatellite links (ISLs), including optical links.Chapter 15 has been extensively rewritten to include more basic details on networks and asynchronoustransfer mode (ATM) operation. Chapter 16 covers high definition television (HDTV) in more detail, and theIridium mobile satellite system, which is now under new ownership, is described in Chap. 17.
In this age of heightened security concerns, it has proved difficult to get detailed technical information onsatellite systems and equipment. Special thanks are, therefore, due to the following people and organizationsthat provided copies of technical papers, diagrams, and figures for the topics listed:
Planar antennas and arrays, reflectarrays, and array switching: Jacquelyn Adams, Battelle/GLITeC; Dr.Luigi Boccia, Universita della
Dennis Roddy xii
Calabria; Thomas J. Braviak, Director, Marketing Administration, Aeroflex/KDI-Integrated Products; Dr.Michael Parnes, Ascor, Saint-Petersburg, Russia; Dharmesh Patel, Radar Division Naval ResearchLaboratory; Professor David Pozar, Electrical and Computer Engineering, University of Massachusetts atAmherst; Dr. Bob Romanofsky, Antenna, Microwave, and Optical Systems Branch, NASA Glenn ResearchCenter; Dr. Peter Schrock, Webmaster/Publications Representative, JPL.
ATM: William D. Ivancic, Glenn Research Center, and Lewis Research Center, NASA; Dr.-Ing. PetiaTodorova, Fraunhofer Institut FOKUS, Berlin.
Turbo and LDPC codes: Dr. Alister G. Burr, Professor of Communications, Dept. of Electronics, Universityof York; Tony Summers, Senior Applications Engineer, Comtech AHA.
HDTV: Cathy Firebrace, Information Officer, the IEE, London U.K.INTELSAT: Travis S. Taylor, Corporate Communications, Intelsat, Washington, DC.Iridium system: Liz DeCastro, Corporate Communications Director, Iridium Satellite.Cospas-Sarsat: Cheryl Bertoia, Principal Operations Officer, Deputy Head, Cospas-Sarsat Secretariat,London, U.K., and Hannah Bermudez also of the Cospas-Sarsat Secretariat.
And from the third edition, thanks to Dr. Henry Driver of Computer Sciences Corporation for detailsrelating to the calculation of geodetic position in Chap. 2. Thanks also to the users and reviewers who madesuggestions for corrections, additions, and improvements. Errors should not occur, but they do, and the authorwould be grateful if these are drawn to his attention. He can be reached at [email protected].
The editorial team at McGraw-Hill has contributed a great deal in getting the fourth edition into print:thanks are due to Steve Chapman, the sponsoring editor; Diana Mattingly, editorial assistant; and Gita Raman,project manager, for their help, and their gentle but persistent reminders to keep the book on schedule.
Dennis RoddyThunder Bay, Ontario
1
Chapter
1Overview of Satellite Systems
1.1 Introduction
The use of satellites in communications systems is very much a fact ofeveryday life, as is evidenced by the many homes equipped with anten-nas, or “dishes,” used for reception of satellite television. What may notbe so well known is that satellites form an essential part of telecom-munications systems worldwide, carrying large amounts of data andtelephone traffic in addition to television signals.
Satellites offer a number of features not readily available with othermeans of communications. Because very large areas of the earth are vis-ible from a satellite, the satellite can form the star point of a commu-nications net, simultaneously linking many users who may be widelyseparated geographically. The same feature enables satellites to providecommunications links to remote communities in sparsely populatedareas that are difficult to access by other means. Of course, satellite sig-nals ignore political boundaries as well as geographic ones, which mayor may not be a desirable feature.
To give some idea of cost, the construction and launch cost of theCanadian Anik-E1 satellite (in 1994 Canadian dollars) was $281.2million, and that of the Anik-E2, $290.5 million. The combined launchinsurance for both satellites was $95.5 million. A feature of any satel-lite system is that the cost is distance insensitive, meaning that itcosts about the same to provide a satellite communications link overa short distance as it does over a large distance. Thus a satellite com-munications system is economical only where the system is in contin-uous use and the costs can be reasonably spread over a large numberof users.
Satellites are also used for remote sensing, examples being thedetection of water pollution and the monitoring and reporting of
2 Chapter One
weather conditions. Some of these remote sensing satellites also forma vital link in search and rescue operations for downed aircraft andthe like.
A good overview of the role of satellites is given by Pritchard (1984)and Brown (1981). To provide a general overview of satellite systemshere, three different types of applications are briefly described in thischapter: (1) the largest international system, Intelsat, (2) the domesticsatellite system in the United States, Domsat, and (3) U.S. NationalOceanographic and Atmospheric Administration (NOAA) series of polarorbiting satellites used for environmental monitoring and search andrescue.
1.2 Frequency Allocationsfor Satellite Services
Allocating frequencies to satellite services is a complicated processwhich requires international coordination and planning. This is car-ried out under the auspices of the International TelecommunicationUnion (ITU).
To facilitate frequency planning, the world is divided into threeregions:
Region 1: Europe, Africa, what was formerly the Soviet Union, andMongolia Region 2: North and South America and Greenland Region 3: Asia (excluding region 1 areas), Australia, and the south-west Pacific
Within these regions, frequency bands are allocated to various satel-lite services, although a given service may be allocated different fre-quency bands in different regions. Some of the services provided bysatellites are:
Fixed satellite service (FSS) Broadcasting satellite service (BSS) Mobile satellite services Navigational satellite services Meteorological satellite services
There are many subdivisions within these broad classifications;for example, the FSS provides links for existing telephone networksas well as for transmitting television signals to cable companies fordistribution over cable systems. Broadcasting satellite services areintended mainly for direct broadcast to the home, sometimes referred
Overview of Satellite Systems 3
to as direct broadcast satellite (DBS) service [in Europe it may be knownas direct-to-home (DTH) service]. Mobile satellite services would includeland mobile, maritime mobile, and aeronautical mobile. Navigationalsatellite services include global positioning systems (GPS), and satel-lites intended for the meteorological services often provide a searchand rescue service.
Table 1.1 lists the frequency band designations in common use forsatellite services. The Ku band signifies the band under the K band, andthe Ka band is the band above the K band. The Ku band is the one usedat present for DBS, and it is also used for certain FSS. The C band isused for FSS, and no DBS is allowed in this band. The very high fre-quency (VHF) band is used for certain mobile and navigational servicesand for data transfer from weather satellites. The L band is used formobile satellite services and navigation systems. For the FSS in the Cband, the most widely used subrange is approximately 4 to 6 GHz. Thehigher frequency is nearly always used for the uplink to the satellite,for reasons that will be explained later, and common practice is to denotethe C band by 6/4 GHz, giving the uplink frequency first. For the directbroadcast service in the Ku band, the most widely used range is approxi-mately 12 to 14 GHz, which is denoted by 14/12 GHz. Although frequencyassignments are made much more precisely, and they may lie somewhatoutside the values quoted here (an example of assigned frequencies inthe Ku band is 14,030 and 11,730 MHz), the approximate values statedare quite satisfactory for use in calculations involving frequency, as willbe shown later in the text.
Care must be exercised when using published references to frequencybands, because the designations have been developed somewhat differ-ently for radar and communications applications; in addition, not allcountries use the same designations.
TABLE 1.1 Frequency Band Designations
Frequency range, (GHz) Band designation
0.1–0.3 VHF0.3–1.0 UHF1.0–2.0 L2.0–4.0 S4.0–8.0 C8.0–12.0 X
12.0–18.0 Ku18.0–27.0 K27.0–40.0 Ka40.0–75 V
75–110 W110–300 mm300–3000 μm
The official ITU frequency band designations are shown in Table 1.2 forcompleteness. However, in this text the designations given in Table 1.1 willbe used, along with 6/4 GHz for the C band and 14/12 GHz for the Ku band.
1.3 INTELSAT
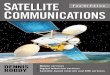
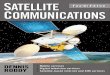
INTELSAT stands for International Telecommunications Satellite. Theorganization was created in 1964 and currently has over 140 membercountries and more than 40 investing entities (see http://www.intelsat.com/for more details). In July 2001 INTELSAT became a private companyand in May 2002 the company began providing end-to-end solutionsthrough a network of teleports, leased fiber, and points of presence (PoPs)around the globe. Starting with the Early Bird satellite in 1965, a succes-sion of satellites has been launched at intervals of a few years. Figure 1.1illustrates the evolution of some of the INTELSAT satellites. As thefigure shows, the capacity, in terms of number of voice channels,increased dramatically with each succeeding launch, as well as thedesign lifetime. These satellites are in geostationary orbit, meaning thatthey appear to be stationary in relation to the earth. The geostationaryorbit is the topic of Chap. 3. At this point it may be noted that geosta-tionary satellites orbit in the earth’s equatorial plane and their positionis specified by their longitude. For international traffic, INTELSATcovers three main regions—the Atlantic Ocean Region (AOR), the IndianOcean Region (IOR), and the Pacific Ocean Region (POR) and what istermed Intelsat America’s Region. For the ocean regions the satellitesare positioned in geostationary orbit above the particular ocean, wherethey provide a transoceanic telecommunications route. For example,INTELSAT satellite 905 is positioned at 335.5° east longitude. The foot-prints for the C-band antennas are shown in Fig. 1.2a, and for the Ku-band spot beam antennas in Figs. 1.2b and c.
4 Chapter One
TABLE 1.2 ITU Frequency Band Designations
Frequency range Metric(lower limit Corresponding abbreviations
Band exclusive, upper metric for thenumber Symbols limit inclusive) subdivision bands
4 VLF 3–30 kHz Myriametric waves B.Mam5 LF 30–300 kHz Kilometric waves B.km6 MF 300–3000 kHz Hectometric waves B.hm7 HF 3–30 MHz Decametric waves B.dam8 VHF 30–300 MHz Metric waves B.m9 UHF 300–3000 MHz Decimetric waves B.dm
10 SHF 3–30 GHz Centimetric waves B.cm11 EHF 30–300 GHz Millimetric waves B.mm12 300–3000 GHz Decimillimetric waves
SOURCE: ITU Geneva.
Fig
ure
1.1
Evo
luti
on o
f IN
TE
LS
AT
sat
elli
tes.
(F
rom
Col
ino
1985
; cou
rtes
y of
IT
U T
elec
omm
un
icat
ion
s J
ourn
al.)
5
6 Chapter One
0°5°10°
Figure 1.2 INTELSAT satellite 905 is positioned at 335.5° Elongitude. (a) The footprints for the C-band antennas; (b) theKu-band spot 1 beam antennas; and (c) the Ku-band spot 2beam antennas.
The INTELSAT VII-VII/A series was launched over a period fromOctober 1993 to June 1996. The construction is similar to that for theV and VA/VB series, shown in Fig. 1.1, in that the VII series has solarsails rather than a cylindrical body. This type of construction is describedin more detail in Chap. 7. The VII series was planned for service in thePOR and also for some of the less demanding services in the AOR. Theantenna beam coverage is appropriate for that of the POR. Figure 1.3shows the antenna beam footprints for the C-band hemispheric cover-age and zone coverage, as well as the spot beam coverage possible withthe Ku-band antennas (Lilly, 1990; Sachdev et al., 1990). When used inthe AOR, the VII series satellite is inverted north for south (Lilly, 1990),minor adjustments then being needed only to optimize the antenna pat-terns for this region. The lifetime of these satellites ranges from 10 to15 years depending on the launch vehicle. Recent figures from theINTELSAT Web site give the capacity for the INTELSAT VII as 18,000two-way telephone circuits and three TV channels; up to 90,000 two-waytelephone circuits can be achieved with the use of “digital circuit mul-tiplication.” The INTELSAT VII/A has a capacity of 22,500 two-waytelephone circuits and three TV channels; up to 112,500 two-way tele-phone circuits can be achieved with the use of digital circuit multipli-cation. As of May 1999, four satellites were in service over the AOR, onein the IOR, and two in the POR.
Overview of Satellite Systems 7
Figure 1.2 (Continued).
The INTELSAT VIII-VII/A series of satellites was launched over theperiod February 1997 to June 1998. Satellites in this series have similarcapacity as the VII/A series, and the lifetime is 14 to 17 years.
It is standard practice to have a spare satellite in orbit on high-reliability routes (which can carry preemptible traffic) and to have aground spare in case of launch failure. Thus the cost for large internationalschemes can be high; for example, series IX, described later, representsa total investment of approximately $1 billion.
Table 1.3 summarizes the details of some of the more recent of theINTELSAT satellites. These satellites provide a much wider range ofservices than those available previously, including such services asInternet, DTH TV, tele-medicine, tele-education, and interactive videoand multimedia. Transponders and the types of signals they carry are
8 Chapter One
Figure 1.3 INTELSAT VII coverage (Pacific Ocean Region; global, hemispheric, andspot beams). (From Lilly, 1990, with permission.)
described in detail in later chapters, but for comparison purposes itmay be noted that one 36 MHz transponder is capable of carrying about9000 voice channels, or two analog TV channels, or about eight digitalTV channels.
In addition to providing transoceanic routes, the INTELSAT satellitesare also used for domestic services within any given country and regionalservices between countries. Two such services are Vista for telephone andIntelnet for data exchange. Figure 1.4 shows typical Vista applications.
1.4 U.S. Domsats
Domsat is an abbreviation for domestic satellite. Domestic satellites areused to provide various telecommunications services, such as voice,data, and video transmissions, within a country. In the United States,all domsats are situated in geostationary orbit. As is well known, theymake available a wide selection of TV channels for the home enter-tainment market, in addition to carrying a large amount of commercialtelecommunications traffic.
U.S. Domsats, which provide a DTH television service, can be classi-fied broadly as high power, medium power, and low power (Reinhart,1990). The defining characteristics of these categories are shown inTable 1.4.
The main distinguishing feature of these categories is the equivalentisotropic radiated power (EIRP). This is explained in more detail inChap. 12, but for present purposes it should be noted that the upper limit
Overview of Satellite Systems 9
TABLE 1.3 INTELSAT Geostationary Satellites
Satellite Location Number of transponders Launch date
901 342°E Up to 72 @ 36 MHz in C-Band June 2001Up to 27 @ 36 MHz in Ku Band
902 62°E Up to 72 @ 36 MHz in C-Band August 2001Up to 23 @ 36 MHz in Ku Band
903 325.5°E Up to 72 @ 36 MHz in C-Band March 2002Up to 22 @ 36 MHz in Ku Band
904 60°E Up to 72 @ 36 MHz in C-Band February 2002Up to 22 @ 36 MHz in Ku Band
905 335.5°E Up to 72 @ 36 MHz in C-Band June 2002Up to 22 @ 36 MHz in Ku Band
906 64°E Up to 72 @ 36 MHz in C-Band September 2002Up to 22 @ 36 MHz in Ku Band
907 332.5°E Up to 72 @ 36 MHz in C-Band February 2003Up to 23 @ 36 MHz in Ku Band
10-02 359°E Up to 70 @ 36 MHz in C-Band June 2004Up to 36 @ 36 MHz in Ku Band
Fig
ure
1.4
(a) T
ypic
al V
ista
app
lica
tion
; (b)
dom
esti
c/re
gion
al V
ista
net
wor
k w
ith
sta
nda
rd A
or B
gat
eway
. (F
rom
Col
ino,
198
5; c
our-
tesy
of
ITU
Tel
ecom
mu
nic
atio
n J
ourn
al.)
10
of EIRP is 60 dBW for the high-power category and 37 dBW for the low-power category, a difference of 23 dB. This represents an increase inreceived power of 102.3 or about 200:1 in the high-power category, whichallows much smaller antennas to be used with the receiver. As noted inthe table, the primary purpose of satellites in the high-power categoryis to provide a DBS service. In the medium-power category, the primarypurpose is point-to-point services, but space may be leased on thesesatellites for the provision of DBS services. In the low-power category,no official DBS services are provided. However, it was quickly discoveredby home experimenters that a wide range of radio and TV programmingcould be received on this band, and it is now considered to provide a defacto DBS service, witness to which is the large number of TV receive-only (TVRO) dishes that have appeared in the yards and on the rooftopsof homes in North America. TVRO reception of C-band signals in thehome is prohibited in many other parts of the world, partly for aestheticreasons, because of the comparatively large dishes used, and partly forcommercial reasons. Many North American C-band TV broadcasts arenow encrypted, or scrambled, to prevent unauthorized access, althoughthis also seems to be spawning a new underground industry in descram-blers. As shown in Table 1.4, true DBS service takes place in the Ku band.Figure 1.5 shows the components of a DBS system (Government ofCanada, 1983). The television signal may be relayed over a terrestriallink to the uplink station. This transmits a very narrow beam signal tothe satellite in the 14-GHz band. The satellite retransmits the televisionsignal in a wide beam in the 12-GHz frequency band. Individual receiverswithin the beam coverage area will receive the satellite signal.
Overview of Satellite Systems 11
TABLE 1.4 Defining Characteristics of Three Categories of United States DBS Systems
High power Medium power Low power
Band Ku Ku CDownlink frequency 12.2–12.7 11.7–12.2 3.7–4.2
allocation GHzUplink frequency 17.3–17.8 14–14.5 5.925–6.425
allocation GHzSpace service BSS FSS FSSPrimary intended use DBS Point-to-point Point-to-pointAllowed additional use Point-to-point DBS DBSTerrestrial interference possible No No YesSatellite spacing degrees 9 2 2–3Satellite spacing determined by ITU FCC FCCAdjacent satellite interference No Yes Yes
possible?Satellite EIRP range (dBW) 51–60 40–48 33–37
NOTES: ITU—International Telecommunication Union; FCC—Federal CommunicationsCommission.
SOURCE: Reinhart, 1990.
Table 1.5 shows the orbital assignments for domestic fixed satellitesfor the United States (FCC, 1996). These satellites are in geostationaryorbit, which is discussed further in Chap. 3. Table 1.6 shows the U.S.Ka-band assignments. Broadband services, such as Internet (see Chap.15), can operate at Ka-band frequencies. In 1983, the U.S. FCC adopteda policy objective, setting 2° as the minimum orbital spacing for satel-lites operating in the 6/4-GHz band and 1.5° for those operating in the14/12-GHz band (FCC, 1983). It is clear that interference between satel-lite circuits is likely to increase as satellites are positioned closertogether. These spacings represent the minimum presently achievablein each band at acceptable interference levels. In fact, it seems likely thatin some cases home satellite receivers in the 6/4-GHz band may be sub-ject to excessive interference where 2° spacing is employed.
1.5 Polar Orbiting Satellites
Polar orbiting satellites orbit the earth in such a way as to cover thenorth and south polar regions. (Note that the term polar orbiting doesnot mean that the satellite orbits around one or the other of the poles).
12 Chapter One
Figure 1.5 Components of a direct broadcasting satellite system. (From Government ofCanada, 1983, with permission.)
Overview of Satellite Systems 13
TABLE 1.5 FCC Orbital Assignment Plan (May 7, 1996)
Location, degrees west longitude Satellite Band/polarization
139 Aurora II/Satcom C-5 4/6 GHz (vertical)139 ACS-3K (AMSC) 12/14 GHz137 Satcom C-1 4/6 GHz (horizontal)137 Unassigned 12/14 GHz135 Satcom C-4 4/6 GHz (vertical)135 Orion O-F4 12/14 GHz133 Galaxy 1-R(S) 4/6 GHz (horizontal)133 Unassigned 12/14 GHz131 Satcom C-3 4/6 GHz (vertical)131 Unassigned 12/14 GHz129 Loral 1 4/6 GHz (horizontal)/12/14 GHz127 Galaxy IX 4/6 GHz (vertical)127 Unassigned 12/14 GHz125 Galaxy 5-W 4/6 GHz (horizontal)125 GSTAR II/unassigned 12/14 GHz123 Galaxy X 4/6 GHz (vertical)/12/14 GHz121 EchoStar FSS-2 12/14 GHz105 GSTAR IV 12/14 GHz103 GE-1 4/6 GHz (horizontal)103 GSTAR 1/GE-1 12/14 GHz101 Satcom SN-4 (formerly 4/6 GHz (vertical)/
Spacenet IV-n) 12/14 GHz99 Galaxy IV(H) 4/6 GHz (horizontal)/12/14 GHz97 Telstar 401 4/6 GHz (vertical)/12/14 GHz95 Galaxy III(H) 4/6 GHz (horizontal)/12/14 GHz93 Telstar 5 4/6 GHz (vertical)93 GSTAR III/Telstar 5 12/14 GHz91 Galaxy VII(H) 4/6 GHz (horizontal)/12/14 GHz89 Telestar 402R 4/6 GHz (vertical)/12/14 GHz87 Satcom SN-3 (formerly 4/6 GHz (horizontal)/12/14 GHz
Spacenet III-)/GE-485 Telstar 302/GE-2 4/6 GHz (vertical)85 Satcom Ku-1/GE-2 12/14 GHz83 Unassigned 4/6 GHz (horizontal)83 EchoStar FSS-1 12/14 GHz81 Unassigned 4/6 GHz (vertical)81 Satcom Ku-2/unassigned 12/14 GHz79 GE-5 4/6 GHz (horizontal)/12/14 GHz77 Loral 2 4/6 GHz (vertical)/12/14 GHz76 Comstar D-4 4/6 GHz (vertical)74 Galaxy VI 4/6 GHz (horizontal)74 SBS-6 12/14 GHz72 Unassigned 4/6 GHz (vertical)71 SBS-2 12/14 GHz69 Satcom SN-2/Telstar 6 4/6 GHz (horizontal)/12/14 GHz67 GE-3 4/6 GHz (vertical)/12/14 GHz64 Unassigned 4/6 GHz (horizontal)64 Unassigned 12/14 GHz62 Unassigned 4/6 GHz (vertical)62 ACS-2K (AMSC) 12/14 GHz60 Unassigned 4/6 GHz60 Unassigned 12/14 GHz
14 Chapter One
TABLE 1.6 Ka-Band Orbital Assignment Plan (FCC December 19, 1997)
Location Company
147°W.L. Morning Star Satellite Company, L.L.C.125°W.L. PanAmSat Licensee Corporation121°W.L. Echostar Satellite Corporation115°W.L. Loral Space & Communications, Ltd.113°W.L.∗ VisionStar, Inc.109.2°W.L. KaStar Satellite Communications Corp.105°W.L.† GE American Communications, Inc.103°W.L. PanAmSat Corporation101°W.L. Hughes Communications Galaxy, Inc.99°W.L. Hughes Communications Galaxy, Inc.97°W.L. Lockheed Martin Corporation95°W.L. NetSat 28 Company, L.L.C.93°W.L. Loral Space & Communications, Ltd.91°W.L. Comm, Inc.89°W.L. Orion Network Systems87°W.L. Comm, Inc.85°W.L. GE American Communications, Inc.83°W.L. Echostar Satellite Corporation81°W.L. Orion Network Systems77°W.L. Comm, Inc.75°W.L. Comm, Inc.73°W.L. KaStar Satellite Corporation67°W.L. [under consideration]62°W.L. Morning Star Satellite Company, L.L.C.58°W.L. PanAmSat Corporation49°W.L. Hughes Communications Galaxy, Inc.47°W.L. Orion Atlantic, L.P.21.5°W.L. Lockheed Martin Corporation17°W.L. GE American Communications, Inc.2°E.L. Lockheed Martin Corporation25°E.L. Hughes Communication Galaxy, Inc.30°E.L. Morning Star Satellite Company, L.L.C.36°E.L. PanAmSat Corporation40°E.L. PanAmSat Corporation48°E.L. PanAmSat Corporation54°E.L. Hughes Communications Galaxy, Inc.56°E.L. GE American Communications, Inc.78°E.L. Orion Network Systems, Inc.101°E.L. Hughes Communications Galaxy, Inc.105.5°E.L. Loral Space & Communications, Ltd.107.5°E.L. Morning Star Satellite Company, L.L.C.
NOTES: FCC—Federal Communications Commission; W.L.—West Longitude; E.L.—EastLongitude.
∗VisionStar will operate at a nominal orbit location of 113.05°W.L., and with a station-keeping box of ±0.05°, thereby increasing the separation from the Canadian filing at 111.1°W.L.by 0.1° relative to the worst case orbital spacing using the station keeping assumed in the ITUpublications (±0.1°).
†The applicants in the range 95° to 105°W.L. have agreed to operate their satellites with anominal 0.05° offset to the west, and with a station-keeping box of ±0.05°, thereby increasingthe separation from the Luxembourg satellite at 93.2°W.L. by 0.1° relative to the worst caseorbital spacing using the station keeping assumed in the ITU publications (±0.1°).
Figure 1.6 shows a polar orbit in relation to the geostationary orbit.Whereas there is only one geostationary orbit, there are, in theory, aninfinite number of polar orbits. The U.S. experience with weather satel-lites has led to the use of relatively low orbits, ranging in altitudebetween 800 and 900 km, compared with 36,000 km for the geostation-ary orbit. Low earth orbiting (LEO) satellites are known generally bythe acronym LEOSATS.
In the United States, the National Polar-orbiting OperationalEnvironmental Satellite System (NPOESS) was established in 1994 toconsolidate the polar satellite operations of the Air Force, NASA(National Aeronautics and Space Administration) and NOAA (NationalOceanic and Atmospheric Administration). NPOESS manages the
Overview of Satellite Systems 15
TABLE 1.6 Ka-Band Orbital Assignment Plan (FCC December 19, 1997) (Continued )
Location Company
111°E.L. Hughes Communications Galaxy, Inc.114.5°E.L. GE American Communications, Inc.124.5°E.L PanAmSat Corporation126.5°E.L. Orion Network Systems, Inc.130°E.L. Lockheed Martin Corporation149°E.L. Hughes Communications Galaxy, Inc.164°E.L. Hughes Communications Galaxy, Inc.173°E.L. PanAmSat Corporation175.25°E.L. Lockheed Martin Corporation
Figure 1.6 Geostationary orbit and one possible polar orbit.
Integrated Program Office (IPO) and the Web page can be found athttp://www.ipo.noaa.gov/. As of 2005, a four-orbit system is in place,consisting of two U.S. Military orbits, one U.S. Civilian orbit and oneEUMETSAT/METOP orbit. Here, METSAT stands for meteorologicalsatellite and EUMETSAT stands for the European organization for theexploration of the METSAT program. METOP stands for meteorologi-cal operations. These orbits are sun synchronous, meaning that theycross the equator at the same local time each day. For example, thesatellites in the NPOESS (civilian) orbit will cross the equator, goingfrom south to north, at times 1:30 P.M., 5:30 P.M., and 9:30 P.M. Sun-synchronous orbits are described in more detail in Chap. 2, but briefly,the orbit is arranged to rotate eastward at a rate of 0.9856°/day, tomake it sun synchronous. In a sun-synchronous orbit the satellitecrosses the same spot on the earth at the same local time each day, sothat the same area of the earth can be viewed under approximately thesame lighting conditions each day. A sun-synchronous orbit is inclinedslightly to the west of the north pole. By definition, an orbital passfrom south to north is referred to as an ascending pass, and from northto south as a descending pass.
The polar orbits are almost circular, and as previously mentionedthey are at a height of between 800 and 900 km above earth. The polarorbiters are able to track weather conditions over the entire earth, andprovide a wide range of data, including visible and infrared radiometerdata for imaging purposes, radiation measurements, and temperatureprofiles. They carry ultraviolet sensors that measure ozone levels, andthey can monitor the ozone hole over Antarctica. The polar orbiterscarry a NOAA letter designation before launch, which is changed to anumeric designation once the satellite achieves orbit. For example,NOAA M, launched on June 24, 2002, became NOAA 17 when success-fully placed in orbit. The series referred to as the KLM satellites carrymuch improved instrumentation. Some details are shown in Table 1.7.
Most of the polar orbiting satellites used in weather and environ-mental studies, and as used for monitoring and in search and rescue,have a “footprint” about 6000 km in diameter. This is the size of theantenna spot beam on the surface of the earth. As the satellite orbits theearth, the spot beam sweeps out a swath on the earth’s surface about6000 km wide passing over north and south poles. The orbital period ofthese satellites is about 102 min. Since a day has 1440 min, the numberof orbits per day is 1440/102 or approximately 14. In the 102 min theearth rotates eastward 360° × 102/1440 or about 25°. Neglecting for themoment the small eastward rotation of the orbit required for sun syn-chronicity, the earth will rotate under the subsatellite path by thisamount, as illustrated in Fig. 1.7.
16 Chapter One
Overview of Satellite Systems 17
TABLE 1.7 NOAA KLM Satellites
Launch date NOAA-K (NOAA-15): May 13, 1998NOAA-L: September 21, 2000NOAA-M: June 24, 2000NOAA-N: March 19, 2005 (tentative)NOAA-N’: July 2007
Mission life 2 years minimumOrbit Sun synchronous, 833 ± 19 km
or 870 ± 19 kmMass 1478.9 kg on orbit; 2231.7 kg on launchLength/Diameter 4.18 m/1.88 mSensors Advanced very high resolution radiometer
(AVHRR/3)Advanced microwave sounding unit-A
(AMSU-A)Advanced microwave sounding unit-B
(AMSU-B)High resolution infrared radiation sounder
(HIRS/3)Space environment monitor (SEM/2)Search and rescue (SAR) repeater
and processorData collection system (DCS/2)
Figure 1.7 Polar orbiting satellite: (a) first pass; (b) second pass, earth havingrotated 25°. Satellite period is 102 min.
1.6 Argos System
The Argos data collection system (DCS) collects environmental dataradioed up from platform transmitter terminals (PTT) (Argos, 2005).The characteristics of the PTT are shown in Table 1.8.
The transmitters can be installed on many kinds of platforms, includ-ing fixed and drifting buoys, balloons, and animals. The physical size ofthe transmitters depends on the application. These can weigh as littleas 17 g for transmitters fitted to birds, to track their migratory patterns.The PTTs transmit automatically at preset intervals, and those withinthe 6000 km swath are received by the satellite. As mentioned, the satel-lite completes about 14 orbits daily, and all orbits cross over the poles. APTT located at the polar regions would therefore be able to deliverapproximately 14 messages daily. At least two satellites are operationalat any time, which doubles this number to 28. At the equator the situa-tion is different. The equatorial radius of the earth is approximately6378 km, which gives a circumference of about 40,074 km. Relative tothe orbital footprint, a given longitude at the equator will thereforerotate with the earth a distance of 40074 × 102/1440 or about 2839 km.This assumes a stationary orbital path, but as mentioned previously theorbit is sun synchronous, which means that it rotates eastward almost1° per day (see Sec. 2.8.1), that is in the same direction as the earth’s rota-tion. The overall result is that an equatorial PTT starting at the west-ern edge of the footprint swath will “see” between three and four passesper day for one satellite. Hence the equatorial passes number betweensix and seven per day for two satellites. During any one pass the PTT isin contact with the satellite for 10 min on average. The messages receivedat the satellite are retransmitted in “real time” to one of a number ofregional ground receiving stations whenever the satellite is within range.The messages are also stored aboard the satellites on tape recorders, andare “dumped” to one of three main ground receiving stations. These arelocated at Wallops Island, VA, USA, Fairbanks, Alaska, USA, andLannion, France. The Doppler shift in the frequency received at thesatellite is used to determine the location of the PTT. This is discussedfurther in connection with the Cospas-Sarsat search and rescue satellites.
18 Chapter One
TABLE 1.8 Platform Transmitter Terminals (PTT) Characteristics
Uplink frequency 401.75 MHzMessage length Up to 32 bytesRepetition period 45–200 sMessages/pass Varies depending on latitude and type of serviceTransmission time 360–920 msDuty cycle VariesPower Battery, solar, external
SOURCE: www.argosinc.com/documents/sysdesc.pdf
1.7 Cospas-Sarsat*
COSPAS is an acronym from the Russian Cosmicheskaya Sistyema PoiskaAvariynich Sudov, meaning space system for the search of vessels in dis-tress and SARSAT stands for Search and Rescue Satellite-Aided Tracking(see http://www.equipped.com/cospas-sarsat_overview.htm). The initialMemorandum of Understanding that led to the development of thesystem was signed in 1979 by agencies from Canada, France, the USA,and the former USSR. There are (as of November 2004) 37 countries andorganizations associated with the program. Canada, France, Russiaand the USA provide and operate the satellites and ground-segmentequipment, and other countries provide ground-segment support. A fulllist of participating countries will be found in Cospas-Sarsat (2004).The system has now been developed to the stage where both low earthorbiting (LEO) satellites and geostationary earth orbiting (GEO) satel-lites are used, as shown in Fig. 1.8.
The basic system requires users to carry distress radio beacons, whichtransmit a carrier signal when activated. A number of different beaconsare available: emergency locator transmitter (ELT) for aviation use; emer-gency position indicating radio beacon (EPIRB) for maritime use; and per-sonal locator beacon (PLB) for personal use. The beacons can be activatedmanually or automatically (e.g., by a crash sensor). The transmittedsignal is picked up by a LEO satellite, and because this satellite is movingrelative to the radio beacon, a Doppler shift in frequency is observed. Ineffect, if the line of sight distance between transmitter and satellite isshortened as a result of the relative motion, the wavelength of the emit-ted signal is also shortened. This in turn means the received frequencyis increased. If the line of sight distance is lengthened as a result of the
Overview of Satellite Systems 19
LEOSAR satellites
GEOSAR satellites
Figure 1.8 Geostationary orbit search and rescue (GEOSAR) and low earth orbit searchand rescue (LEOSAR) satellites. (Courtesy of Cospas-Sarsat Secretariat.)
∗http://www.cospas-sarsat.org/
relative motion the wavelength is lengthened and therefore the receivedfrequency decreased. It should be kept in mind that the radio-beaconemits a constant frequency, and the electromagnetic wave travels at con-stant velocity, that of light. Denoting the constant emitted frequency byf0, the relative velocity between satellite and beacon, measured along theline of sight as v, and the velocity of light as c, then to a close approxi-mation the received frequency is given by (assuming v��c):
(1.1)
The relative velocity v is positive when the line of sight distance isdecreasing, (satellite and beacon moving closer together) and negativewhen it is increasing (satellite and beacon moving apart). The relativevelocity v is a function of the satellite motion and of the earth’s rotation.The frequency difference resulting from the relative motion is
(1.2)
The fractional change is
(1.3)
When v is zero, the received frequency is the same as the transmittedfrequency. When the beacon and satellite are approaching each other, vis positive, which results in a positive value of Δf. When the beacon andsatellite are receding, v is negative, resulting in a negative value of Δf.The time at which Δf is zero is known as the time of closest approach.
Figure 1.9 shows how the beacon frequency, as received at the satel-lite, varies for different passes. In all cases, the received frequency goesfrom being higher to being lower than the transmitted value as thesatellite approaches and then recedes from the beacon. The longestrecord and the greatest change in frequency are obtained if the satellitepasses over the site, as shown for pass no. 2. This is so because the satel-lite is visible for the longest period during this pass. Knowing the orbitalparameters for the satellite, the beacon frequency, and the Doppler shiftfor any one pass, the distance of the beacon relative to the projection ofthe orbit on the earth can be determined. However, whether the beaconis east or west of the orbit cannot be determined easily from a singlepass. For two successive passes, the effect of the earth’s rotation on theDoppler shift can be estimated more accurately, and from this it canbe determined whether the orbital path is moving closer to, or movingaway from the beacon. In this way, the ambiguity in east-west posi-tioning is resolved. The satellite must of course get the informationback to an earth station so that the search and rescue operation can becompleted, successfully one hopes. The SARSAT communicates on a
�f
f0�
vc
�f � f � f0 �vc f0
f � Q1 � vc Rf0
20 Chapter One
downlink frequency of 1544.5 MHz to one of several local user terminals(LUTs) established at various locations throughout the world.
In the original Cospas-Sarsat system, the signal from the emergencyradio beacons was at a frequency of 121.5 MHz. It was found that over98 percent of the alerts at this frequency were false, often being causedby interfering signals from other services and by inappropriate handlingof the equipment. The 121.5-MHz system relies entirely on the Dopplershift, and the carrier does not carry any identification information. Thepower is low, typically a few tenths of a watt, which limits locational accu-racy to about 10 to 20 km. There are no signal storage facilities aboard thesatellites for the 121.5-MHz signals, which therefore requires that thedistress site (the distress beacon) and the LUT must be visible simulta-neously from the satellite. Because of these limitations, the 121.5-MHzbeacons are being phased out, and the 121.5-MHz service will terminateon February 1, 2009. Cospas-13, planned for launch in 2006, and Sarsat-14, planned for launch from 2009, will not carry 121.5-MHz beacons.However, all Cospas-Sarsat satellites launched prior to these will carrythe 121.5-MHz processors. (Recall that Sarsat-7 is NOAA-15, Sarsat-8is NOAA-L, Sarsat-9 is NOAA-M, and Sarsat-10 is NOAA-N.)
Overview of Satellite Systems 21
Figure 1.9 Showing the Doppler shift in received frequency on successive passes of thesatellite. ELT—emergency locator transmitter.
Newer beacons operating at a frequency of 406 MHz are being intro-duced. The power has been increased to 5 W, which should permit loca-tional accuracy to 3 to 5 km (Scales and Swanson, 1984). The 406-MHzcarrier is modulated with information such as an identifying code, thelast known position, and the nature of the emergency. The satellite hasthe equipment for storing and forwarding the information from a con-tinuous memory dump, providing complete worldwide coverage with100 percent availability. The polar orbiters, however, do not providecontinuous coverage. The mean time between a distress alert being sentand the appropriate search and rescue coordination center being noti-fied is estimated at 27 min satellite storage time plus 44 min waitingtime for a total delay of 71 min (Cospas-Sarsat, 1994a, b).
The nominal frequency is 406 MHz, and originally, a frequency of406.025 MHz was used. Because of potential conflict with the GEOSARsystem, new channels at 406.028 MHz and 406.037 MHz have beenopened, and type approval for the 406.025 MHz channel ceased in January2002. However, beacon types approved before the January 2001 date andstill in production may continue to operate at 406.025 MHz. More detailswill be found at http://www.cospas-sarsat.org/Beacons/406Bcns.htm.
The status of the Cospas-Sarsat low earth orbiting search and rescue(LEOSAR) satellites as of April 19, 2005 is shown in Table 1.9.
22 Chapter One
TABLE 1.9 Status of LEOSAR Payload Instruments
Search andRepeater rescue
Satellite instruments, MHz processor Comments
121.5 243 406 Global LocalSarsat 6 F F F NO NOSarsat 7 F L F F F Intermittent loss of
the 243-MHz service, which may affect anentire or partialsatellite pass.
Sarsat 8 L NO F F F Intermittent loss ofthe 121.5-MHz service, whichmay affect anentire or partialsatellite pass.
Sarsat 9 F F F F FCospas 4 NO NA NO NOCospas 5 F NA NO NO
NOTES: F—fully operational; L—limited operation; NO—not operational; NA—not applicable.SOURCE: http://www.cospas-sarsat.org/Status/spaceSegmentStatus.htm
The nominal space segment of LEOSAR consists of four satellites,although as shown in Table 1.9 more satellites may be in service at anyone time. The status of the 121.5-MHz LEOSAR system as of November2004 consisted of repeaters on five polar orbiters, 43 ground receivingstations (referred to as LEOSAR local user terminals, or LEOLUTs), 26mission control centers (MCCs), and about 680,000 beacons operatingat 121.5 MHz, carried mostly on aircraft and small vessels. The MCCalerts the rescue coordination center (RCC) nearest the location wherethe distress signal originated, and the RCC takes the appropriate actionto effect a rescue. In 2006, Cospas-11 will be launched aboard a new LEOsatellite called “Sterkh.” This is a small, 190 kg satellite designed specif-ically for Cospas-Sarsat operations.
The status of the GEOSAR segment of the Cospas-Sarsat system isshown in Table 1.10.
Since the geostationary satellites are by definition stationary withrespect to the earth, there is no Doppler shift of the received beaconcarrier. The 406-MHz beacons for the GEOSAR component carrypositional information obtained from the global navigational satel-lite systems such as the American GPS (see Sec. 17.5) system, theRussian global navigation satellite system (GLONASS) and Galileo(European). These navigational systems employ medium earth orbit-ing (MEO) satellites, and the space agencies responsible for thesenavigational systems have plans to include 406-MHz repeaters on theMEO satellites.
Although the GEOSAR system provides wide area coverage it does notcover the polar regions, the antenna “footprint” being limited to latitudesof about 75° N and S. The coverage areas are shown in Fig. 1.10.
Overview of Satellite Systems 23
TABLE 1.10 Status of GEOSAR Payload Instruments
Satellite Status Gain control Comments
GOES-9 (155°E) F FixedGOES-East (75°W) F AGCGOES-West (135°W) F FixedINSAT 3A (93.5°E) L TBD INSAT 3A is currently under test;
however, alerts from the systemare distributed operationally.INSAT system does not processsecond protected field of longformat messages.
MSG-1 (3.4°W) F Fixed
NOTES: F—fully operational; L—limited operation; NO—not operational; NA—notapplicable; TBD—to be determined; GOES—Geostationary Operational EnvironmentalSatellite (USA); INSAT—Indian Satellite; MSG—Meteosat Second Generation (European).
SOURCE: http: //www.cospas-sarsat.org/Status/spaceSegmentStatus.htm
45 0 –45
–135
–90
–45
045
9013
5
GO
ES
-9In
sat-
3AM
SG
GO
ES
-Eas
tG
OE
S-W
ast
Fig
ure
1.1
0G
EO
SA
R c
over
age.
24
1.8 Problems
1.1. Describe briefly the main advantages offered by satellite communications.Explain what is meant by a distance-insensitive communications system.
1.2. Comparisons are sometimes made between satellite and optical fibercommunications systems. State briefly the areas of application for which youfeel each system is best suited.
1.3. Describe briefly the development of INTELSAT starting from the 1960sthrough the present. Information can be found at Web sitehttp://www.intelsat.com/.
1.4. From the Web site http://www.intelsat.com/, find the positions of theINTELSAT 901 and the INTELSAT 10-02 satellites, as well as the number ofC-band and Ku-band transponders on each.
1.5. From Table 1.3, and by accessing the Intelsat web site, determine whichsatellites provide service to each of the regions AOR, IOR, and POR.
1.6. Referring to Table 1.4, determine the power levels, in watts, for each ofthe three categories listed.
1.7. From Table 1.5, determine typical orbital spacing in degrees for (a) the 6/4-GHz band and (b) the 14/12-GHz band.
1.8. Give reasons why the Ku band is used for the DBS service.
1.9. An earth station is situated at longitude 91°W and latitude 45°N.Determine the range to the Galaxy VII satellite. A spherical earth of uniformmass and mean radius 6371 km may be assumed.
1.10. Given that the earth’s equatorial radius is 6378 km and the height of thegeostationary orbit is 36,000 km, determine the intersatellite distance betweenthe VisionStar Inc. satellite and the NetSat 28 Company L.L.C. satellite,operating in the Ka band.
1.11. Explain what is meant by a polar orbiting satellite. A NOAA polar orbitingsatellite completes one revolution around the earth in 102 min. The satellitemakes a north to south equatorial crossing at longitude 90°W. Assuming thatthe orbit is circular and crosses exactly over the poles, estimate the position ofthe subsatellite point at the following times after the equatorial crossing: (a) 0 h,10 min; (b) 1 h, 42 min; (c) 2 h, 0 min. A spherical earth of uniform mass maybe assumed.
1.12. By accessing the NOAA Web page at http://www.noaa.gov/, find out howthe GOES take part in weather forecasting. Give details of the GOES-12characteristics.
Overview of Satellite Systems 25
1.13. The Cospas-Sarsat Web site is at http://www.cospas-sarsat.org. Accessthis site and find out the number and location of the LEOLUTs in current use.
1.14. Using information obtained from the Cospas-Sarsat Web site, find outwhich satellites carry (a) 406-MHz SAR processors (SARPs), (b) 406-MHz SARrepeaters (SARRs), and (c) 121.5-MHz SARRs. What is the basic differencebetween a SARP and a SARR?
1.15. Intelsat satellite 904 is situated at 60°E. Determine the land areas(markets)the satellite can service. The global EIRP is given as 31.0 up to 35.9dBW, beam edge to beam peak. What are the equivalent values in watts? (seeApp. G for the definition of dBW).
1.16. A satellite is in a circular polar orbit at a height of 870 km, the orbitalperiod being approximately 102 min. Assuming an average value of earth’sradius of 6371 km determine approximately the maximum period the satelliteis visible from a beacon at sea level.
1.17. A satellite is in a circular polar orbit at a height of 870 km, the orbitalperiod being approximately 102 min. The satellite orbit passes directly over abeacon at sea level. Assuming an average value of earth’s radius of 6371 kmdetermine approximately the fractional Doppler shift at the instant the satelliteis first visible from the beacon.
References
Argos. 2005. General information to [email protected] Customer support to DUS, atwww.argosinc.com/documents. From the menu list select sysdesc.pdf
Brown, M. P., Jr. (Ed.). 1981. Compendium of Communication and Broadcast Satellites1958 to 1980. IEEE Press, New York.
Cospas-Sarsat, at http://www.cospas-sarsat.org/Cospas-Sarsat, at http://www.cospas-sarsat.org/Beacons/406Bcns.htmCospas-Sarsat, at http://www.cospas-sarsat.org/Status/spaceSegmentStatus.htmCospas-Sarsat, at http://www.equipped.com/cospas-sarsat_overview.htmCospas-Sarsat. 1994a. System Data No. 17, February.Cospas-Sarsat. 1994b. Information Bulletin No. 8, February.Cospas-Sarsat. 2004. Information Bulletin No.17, November, at http://www.cospas-
sarsat.orgFCC. 1983. “Licensing of Space Stations in the Domestic Fixed-Satellite Service and
Related Revisions of Part 25 of the Rules and Regulations, Report 83-184 33206, CCDocket 81-184.” Federal Communications Commission, Washington, DC.
FCC. 1997 “Assignment of Orbital Locations to Space Stations in the Ka-Band.” AdoptedMay 8, 1997, released May 9, at http://www.fcc.gov/Bureaus/International/Orders/1997/da970967.txt
FCC. 1996. “Orbital Assignment Plan,” at http://www.fcc.gov/Bureaus/International/Orders/1996/da960713.txt
Government of Canada. 1983. “Direct-to-Home Satellite Broadcasting for Canada.” IEEESpectrum, March.
Information Services, Department of Communications. Intelsat, at http://www.intelsat.com/Lilly, C. J. 1990. “INTELSAT’s New Generation.” IEE Review, Vol. 36, No. 3, March.NOAA, at http://www.ipo.noaa.gov/
26 Chapter One
Pritchard, W. L. 1984. “The History and Future of Commercial Satellite Communications.”IEEE Commun. Mag., Vol. 22, No. 5, May, pp. 22–37.
Reinhart, E. E. 1990. “Satellite Broadcasting and Distribution in the United States.”Telecommun. J., Vol. 57, No. V1, June, pp. 407–418.
Sachdev, D. K., P. Nadkarni, P. Neyret, L. R. Dest, K. Betaharon, and W. J. English. 1990.“INTELSAT V11: A Flexible Spacecraft for the 1990s and Beyond.” Proc. IEEE, Vol.78, No. 7, July, pp. 1057–1074.
Scales, W. C., and R. Swanson. 1984. “Air and Sea Rescue via Satellite Systems.” IEEESpectrum, March, pp. 48–52.
Overview of Satellite Systems 27
29
Chapter
2Orbits and Launching Methods
2.1 Introduction
Satellites (spacecraft) orbiting the earth follow the same laws thatgovern the motion of the planets around the sun. From early timesmuch has been learned about planetary motion through careful obser-vations. Johannes Kepler (1571–1630) was able to derive empiricallythree laws describing planetary motion. Later, in 1665, Sir Isaac Newton(1642–1727) derived Kepler’s laws from his own laws of mechanics anddeveloped the theory of gravitation [for very readable accounts of muchof the work of these two great men, see Arons (1965) and Bate et al.(1971)].
Kepler’s laws apply quite generally to any two bodies in space whichinteract through gravitation. The more massive of the two bodies isreferred to as the primary, the other, the secondary or satellite.
2.2 Kepler’s First Law
Kepler’s first law states that the path followed by a satellite around theprimary will be an ellipse. An ellipse has two focal points shown as F1and F2 in Fig. 2.1. The center of mass of the two-body system, termedthe barycenter, is always centered on one of the foci. In our specific case,because of the enormous difference between the masses of the earth andthe satellite, the center of mass coincides with the center of the earth,which is therefore always at one of the foci.
The semimajor axis of the ellipse is denoted by a, and the semiminoraxis, by b. The eccentricity e is given by
(2.1)e � 2a2 � b2a
The eccentricity and the semimajor axis are two of the orbital param-eters specified for satellites (spacecraft) orbiting the earth. For an ellip-tical orbit, 0 � e � 1. When e � 0, the orbit becomes circular. Thegeometrical significance of eccentricity, along with some of the other geo-metrical properties of the ellipse, is developed in App. B.
2.3 Kepler’s Second Law
Kepler’s second law states that, for equal time intervals, a satellite willsweep out equal areas in its orbital plane, focused at the barycenter.Referring to Fig. 2.2, assuming the satellite travels distances S1 andS2 meters in 1 s, then the areas A1 and A2 will be equal. The averagevelocity in each case is S1 and S2 m/s, and because of the equal area law,it follows that the velocity at S2 is less than that at S1. An important
30 Chapter Two
Figure 2.1 The foci F1 and F2, the semimajor axis a, and thesemiminor axis b of an ellipse.
Figure 2.2 Kepler’s second law. The areas A1 and A2 sweptout in unit time are equal.
consequence of this is that the satellite takes longer to travel a givendistance when it is farther away from earth. Use is made of this propertyto increase the length of time a satellite can be seen from particulargeographic regions of the earth.
2.4 Kepler’s Third Law
Kepler’s third law states that the square of the periodic time of orbitis proportional to the cube of the mean distance between the twobodies. The mean distance is equal to the semimajor axis a. For theartificial satellites orbiting the earth, Kepler’s third law can be writtenin the form
(2.2)
where n is the mean motion of the satellite in radians per second and � isthe earth’s geocentric gravitational constant. Its value is (see Wertz, 1984,Table L3).
(2.3)
Equation (2.2) applies only to the ideal situation of a satellite orbit-ing a perfectly spherical earth of uniform mass, with no perturbingforces acting, such as atmospheric drag. Later, in Sec. 2.8, the effectsof the earth’s oblateness and atmospheric drag will be taken intoaccount.
With n in radians per second, the orbital period in seconds is given by
(2.4)
The importance of Kepler’s third law is that it shows there is a fixedrelationship between period and semimajor axis. One very importantorbit in particular, known as the geostationary orbit, is determined bythe rotational period of the earth and is described in Chap. 3. In antic-ipation of this, the approximate radius of the geostationary orbit isdetermined in the following example.
Example 2.1 Calculate the radius of a circular orbit for which the period is 1 day.
Solution There are 86,400 seconds in 1 day, and therefore the mean motion is
� 7.272 � 10�5 rad/s
n �2�
86400
P � 2�n
� � 3.986005 � 1014 m3 /s2
a3 ��
n2
Orbits and Launching Methods 31
From Kepler’s third law:
� 42,241 km
Since the orbit is circular the semimajor axis is also the radius.
2.5 Definitions of Terms for Earth-OrbitingSatellites
As mentioned previously, Kepler’s laws apply in general to satellitemotion around a primary body. For the particular case of earth-orbitingsatellites, certain terms are used to describe the position of the orbitwith respect to the earth.
Subsatellite path. This is the path traced out on the earth’s surfacedirectly below the satellite.Apogee. The point farthest from earth. Apogee height is shown as hain Fig. 2.3.Perigee. The point of closest approach to earth. The perigee heightis shown as hp in Fig. 2.3.
a � c3.986005 � 1014(7.272 � 10�5)2
d 1/3
32 Chapter Two
Figure 2.3 Apogee height ha,perigee height hp, and inclination i.la is the line of apsides.
Line of apsides. The line joining the perigee and apogee through thecenter of the earth.Ascending node. The point where the orbit crosses the equatorialplane going from south to north.Descending node. The point where the orbit crosses the equatorialplane going from north to south.Line of nodes. The line joining the ascending and descending nodesthrough the center of the earth.Inclination. The angle between the orbital plane and the earth’sequatorial plane. It is measured at the ascending node from theequator to the orbit, going from east to north. The inclination isshown as i in Fig. 2.3. It will be seen that the greatest latitude,north or south, reached by the subsatellite path is equal to theinclination.Prograde orbit. An orbit in which the satellite moves in the samedirection as the earth’s rotation, as shown in Fig. 2.4. The progradeorbit is also known as a direct orbit. The inclination of a progradeorbit always lies between 0° and 90°. Most satellites are launchedin a prograde orbit because the earth’s rotational velocity providespart of the orbital velocity with a consequent saving in launchenergy.
Orbits and Launching Methods 33
Figure 2.4 Prograde and retrograde orbits.
Retrograde orbit. An orbit in which the satellite moves in a directioncounter to the earth’s rotation, as shown in Fig. 2.4. The inclinationof a retrograde orbit always lies between 90° and 180°.Argument of perigee. The angle from ascending node to perigee,measured in the orbital plane at the earth’s center, in the direction ofsatellite motion. The argument of perigee is shown as w in Fig. 2.5.Right ascension of the ascending node. To define completely the posi-tion of the orbit in space, the position of the ascending node is speci-fied. However, because the earth spins, while the orbital plane remainsstationary (slow drifts that do occur are discussed later), the longitudeof the ascending node is not fixed, and it cannot be used as an absolutereference. For the practical determination of an orbit, the longitude andtime of crossing of the ascending node are frequently used. However,for an absolute measurement, a fixed reference in space is required.The reference chosen is the first point of Aries, otherwise known as thevernal, or spring, equinox. The vernal equinox occurs when the suncrosses the equator going from south to north, and an imaginary linedrawn from this equatorial crossing through the center of the sunpoints to the first point of Aries (symbol ϒ). This is the line of Aries. Theright ascension of the ascending node is then the angle measured east-ward, in the equatorial plane, from the ϒ line to the ascending node,shown as Ω in Fig. 2.5.Mean anomaly. Mean anomaly M gives an average value of theangular position of the satellite with reference to the perigee. For a
34 Chapter Two
Figure 2.5 The argument of perigee w and the right ascensionof the ascending node Ω.
circular orbit, M gives the angular position of the satellite in the orbit.For elliptical orbit, the position is much more difficult to calculate, andM is used as an intermediate step in the calculation as described inSec. 2.9.5.True anomaly. The true anomaly is the angle from perigee to thesatellite position, measured at the earth’s center. This gives thetrue angular position of the satellite in the orbit as a function oftime. A method of determining the true anomaly is described inSec. 2.9.5.
2.6 Orbital Elements
Earth-orbiting artificial satellites are defined by six orbital elementsreferred to as the keplerian element set. Two of these, the semimajor axisa and the eccentricity e described in Sec. 2.2, give the shape of theellipse. A third, the mean anomaly M0, gives the position of the satel-lite in its orbit at a reference time known as the epoch. A fourth, the argu-ment of perigee w, gives the rotation of the orbit’s perigee point relativeto the orbit’s line of nodes in the earth’s equatorial plane. The remain-ing two elements, the inclination i and the right ascension of the ascend-ing node Ω, relate the orbital plane’s position to the earth. These fourelements are described in Sec. 2.5.
Because the equatorial bulge causes slow variations in w and Ω, andbecause other perturbing forces may alter the orbital elements slightly,the values are specified for the reference time or epoch, and thus theepoch also must be specified.
Appendix C lists the two-line elements provided to users by the U.S.National Aeronautics and Space Administration (NASA). The two-lineelements may be downloaded from Celestrak at http://celestrak.com/NORAD/elements/. Figure 2.6 shows how to interpret the NASA two-lineelements.
It will be seen that the semimajor axis is not specified, but this canbe calculated from the data given. An example calculation is presentedin Example 2.2.
Example 2.2 Calculate the semimajor axis for the satellite parameters given inTable 2.1.
Solution The mean motion is given in Table 2.1 as In rad/s this is
� 0.00104 s�1
n0 � 2 � � � NN
NN � 14.23304826 day�1
Orbits and Launching Methods 35
1 22
year
2 37
916
1819
2125
2732
3335
4244
5153
63
5 5
33
3
3 3
89
80
00
02
2.
07
96
88
45
20
70
00
00
–0
14
47
3–
58
87
7.
00
00
30
3U
A
89
8.
.6
32
25
18
53
24
..
.1
35
53
46
85
23
30
48
26
11
66
35
31
42
46
00
11
50
11
i �
ew
Mn
Rev
. No.
day
dt
dn
Fig
ure
2.6
Two-
lin
e el
emen
ts f
or N
OA
A-1
5.
36
Kepler’s third law gives
� 7192.335 km
2.7 Apogee and Perigee Heights
Although not specified as orbital elements, the apogee height and perigeeheight are often required. As shown in App. B, the length of the radius vec-tors at apogee and perigee can be obtained from the geometry of the ellipse:
ra � a(1�e) (2.5)
rp � a(1�e) (2.6)
In order to find the apogee and perigee heights, the radius of theearth must be subtracted from the radii lengths, as shown in the fol-lowing example.
Example 2.3 Calculate the apogee and perigee heights for the orbital parametersgiven in Table 2.1. Assume a mean earth radius of 6371 km.
Solution From Table 2.1: e � .0011501 and from Example 2.1 a � 7192.335 km.Using Eqs. (2.5) and (2.6):
ra � 7192.335(1 � 0.0011501)
a � s �n0
2t1/3
Orbits and Launching Methods 37
TABLE 2.1 Details from the NASA Bulletins (see Fig. 2.6 and App. C)
Line no. Columns Description
1 3–7 Satellite number: 253381 19–20 Epoch year (last two digits of the year): 001 21–32 Epoch day (day and fractional day of
the year): 223.79688452 (this is discussed further in Sec. 2.9.2)
1 34–43 First time derivative of the mean motion(rev/day2): 0.00000307
2 9–16 Inclination (degrees): 98.63282 18–25 Right ascension of the ascending node
(degrees): 251.53242 27–33 Eccentricity (leading decimal point assumed):
00115012 35–42 Argument of perigee (degrees): 113.55342 44–51 Mean anomaly (degrees): 246.68532 53–63 Mean motion (rev/day): 14.233048262 64–68 Revolution number at epoch (rev): 11,663
The corresponding heights are:
� 829.6 km
� 813.1 km
2.8 Orbit Perturbations
The keplerian orbit described so far is ideal in the sense that it assumesthat the earth is a uniform spherical mass and that the only force actingis the centrifugal force resulting from satellite motion balancing thegravitational pull of the earth. In practice, other forces which can be sig-nificant are the gravitational forces of the sun and the moon and atmos-pheric drag. The gravitational pulls of sun and moon have negligibleeffect on low-orbiting satellites, but they do affect satellites in the geo-stationary orbit as described in Sec. 3.5. Atmospheric drag, on the otherhand, has negligible effect on geostationary satellites but does affect low-orbiting earth satellites below about 1000 km.
2.8.1 Effects of a nonspherical earth
For a spherical earth of uniform mass, Kepler’s third law (Eq. 2.2) givesthe nominal mean motion n0 as
(2.7)
The 0 subscript is included as a reminder that this result applies fora perfectly spherical earth of uniform mass. However, it is known thatthe earth is not perfectly spherical, there being an equatorial bulge anda flattening at the poles, a shape described as an oblate spheroid. Whenthe earth’s oblateness is taken into account, the mean motion, denotedin this case by symbol n, is modified to (Wertz, 1984).
(2.8)n � n0 c1 � K1(1 � 1.5 sin2 i)a2(1 � e2)1.5
d
n0 � �
a3
hp � rp � R
ha � ra � R
� 7184.063 km
rp � 7192.335(1 � 0.0011501)
� 7200.607 km
38 Chapter Two
K1 is a constant which evaluates to 66,063.1704 km2. The earth’soblateness has negligible effect on the semimajor axis a, and if a isknown, the mean motion is readily calculated. The orbital period takinginto account the earth’s oblateness is termed the anomalistic period(e.g., from perigee to perigee). The mean motion specified in the NASAbulletins is the reciprocal of the anomalistic period. The anomalisticperiod is
(2.9)
where n is in radians per second.If the known quantity is n (e.g., as is given in the NASA bulletins),
one can solve Eq. (2.8) for a, keeping in mind that n0 is also a functionof a. Equation (2.8) may be solved for a by finding the root of the fol-lowing equation:
(2.10)
This is illustrated in the following example.
Example 2.4 A satellite is orbiting in the equatorial plane with a period fromperigee to perigee of 12 h. Given that the eccentricity is 0.002, calculate the semi-major axis. The earth’s equatorial radius is 6378.1414 km.
Solution Given data: e � 0.002; i � 0°; P � 12 h; K1 � 66063.1704 km2; aE �
6378.1414 km; � � 3.986005 � 1014 m3/s2
The mean motion is:
� 1.454 � 10�4 s�1
Assuming this is the same as n0, Kepler’s third law gives
� 26610 km
Solving the root equation yields a value of 26,612 km.
The oblateness of the earth also produces two rotations of theorbital plane. The first of these, known as regression of the nodes, iswhere the nodes appear to slide along the equator. In effect, the line
a � a �n2b1/3
n �2�
P
n � �
a3c1 � K1(1 � 1.5 sin 2i)
a2(1 � e2)1.5d � 0
PA �2�n �s
Orbits and Launching Methods 39
of nodes, which is in the equatorial plane, rotates about the centerof the earth. Thus Ω, the right ascension of the ascending node, shiftsits position.
If the orbit is prograde (see Fig. 2.4), the nodes slide westward, andif retrograde, they slide eastward. As seen from the ascending node, asatellite in prograde orbit moves eastward, and in a retrograde orbit,westward. The nodes therefore move in a direction opposite to the direc-tion of satellite motion, hence the term regression of the nodes. For apolar orbit (i � 90°), the regression is zero.
The second effect is rotation of apsides in the orbital plane, describedbelow. Both effects depend on the mean motion n, the semimajor axisa, and the eccentricity e. These factors can be grouped into one factor Kgiven by
(2.11)
K will have the same units as n. Thus, with n in rad/day, K will be inrad/day, and with n in degrees/day, K will be in degrees/day. An approx-imate expression for the rate of change of � with respect to time is(Wertz, 1984)
(2.12)
where i is the inclination. The rate of regression of the nodes will havethe same units as n.
When the rate of change given by Eq. (2.12) is negative, the regres-sion is westward, and when the rate is positive, the regression is east-ward. It will be seen, therefore that for eastward regression, i must begreater than 90o, or the orbit must be retrograde. It is possible to choosevalues of a, e, and i such that the rate of rotation is 0.9856°/day east-ward. Such an orbit is said to be sun synchronous and is described fur-ther in Sec. 2.10.
The other major effect produced by the equatorial bulge is a rotationof the line of apsides. This line rotates in the orbital plane, resulting inthe argument of perigee changing with time. The rate of change is givenby (Wertz, 1984)
(2.13)
Again, the units for the rate of rotation of the line of apsides will bethe same as those for n (incorporated in K). When the inclination i isequal to 63.435°, the term within the parentheses is equal to zero, and
d�dt
� K(2 � 2.5 sin 2 i)
d�dt
� �K cos i
K �nK1
a2(1 � e2)2
40 Chapter Two
hence no rotation takes place. Use is made of this fact in the orbit chosenfor the Russian Molniya satellites (see Probs. 2.23 and 2.24).
Denoting the epoch time by t0, the right ascension of the ascendingnode by Ω0, and the argument of perigee by w0 at epoch gives the newvalues for Ω and w at time t as
(2.14)
(2.15)
Keep in mind that the orbit is not a physical entity, and it is the forcesresulting from an oblate earth, which act on the satellite to produce thechanges in the orbital parameters. Thus, rather than follow a closedelliptical path in a fixed plane, the satellite drifts as a result of theregression of the nodes, and the latitude of the point of closest approach(the perigee) changes as a result of the rotation of the line of apsides.With this in mind, it is permissible to visualize the satellite as follow-ing a closed elliptical orbit but with the orbit itself moving relative tothe earth as a result of the changes in Ω and w. Thus, as stated earlier,the period PA is the time required to go around the orbital path fromperigee to perigee, even though the perigee has moved relative to theearth.
Suppose, for example, that the inclination is 90° so that the regres-sion of the nodes is zero (from Eq. 2.12), and the rate of rotation ofthe line of apsides is −K/2 (from Eq. 2.13), and further, imagine thesituation where the perigee at the start of observations is exactly overthe ascending node. One period later the perigee would be at an angle−KPA/2 relative to the ascending node or, in other words, would besouth of the equator. The time between crossings at the ascendingnode would be PA (1 � K/2n), which would be the period observed fromthe earth. Recall that K will have the same units as n, for example,rad/s.
Example 2.5 Determine the rate of regression of the nodes and the rate of rota-tion of the line of apsides for the satellite parameters specified in Table 2.1. Thevalue for a obtained in Example 2.2 may be used.
Solution From Table 2.1 and Example 2.2 i � 98.6328°; e � 0.0011501; NN �14.23304826 day−1; a � 7192.335 km, and the known constant: K1 � 66063.1704 km2
Converting n to rad/s:
n � 2�NN
� 0.00104 rad/s
� � �0 � d�dt
(t � t0)
� � �0 � d�dt
(t � t0)
Orbits and Launching Methods 41
From Eq. (2.11):
� 6.544 deg/day
From Eq. (2.12):
� 0.981 deg/day
From Eq. (2.13):
� �2.904 deg/day
Example 2.6 Calculate, for the satellite in Example 2.5, the new values for w andΩ one period after epoch.
Solution From Table 2.1:
NN � 14.23304826 day−1; w0 � 113.5534°; Ω0 � 251.5324°
The anomalistic period is
� 0.070259 day
This is also the time difference (t � t0) since the satellite has completed one rev-olution from perigee to perigee. Hence:
� 251.5324 � 0.981(0.070259)
� 251.601°
� 113.5534 � (�2.903)(0.070259)
� 113.349°
� � �0 �d�
dt(t � t0)
� � �0 �d�
dt(t � t0)
PA �1
NN
d�
dt� K(2 � 2.5 sin 2 i)
d�
dt� �K cos i
K �nK1
a2(1 � e2)2
42 Chapter Two
In addition to the equatorial bulge, the earth is not perfectly circularin the equatorial plane; it has a small eccentricity of the order of 10−5.This is referred to as the equatorial ellipticity. The effect of the equato-rial ellipticity is to set up a gravity gradient, which has a pronouncedeffect on satellites in geostationary orbit (Sec. 7.4). Very briefly, a satel-lite in geostationary orbit ideally should remain fixed relative to theearth. The gravity gradient resulting from the equatorial ellipticitycauses the satellites i







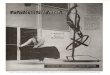

![[ RODDY BRETT ]](https://img.pdfslide.us/doc/110x75/58a2bf3d1a28abaa338b4e40/-roddy-brett-.jpg)