Embed Size (px)
Citation preview
Sampling Methods for Asteroid and Planetary Missions
P. Magnani E. Re
Marco Polo Workshop - Cannes June 2008
10/06/2008 2
Brief overview on sampling techniques
Type of missions
Example of sampling systems
Table of contents:
10/06/2008 3
Brief overview on Sampling Techniques
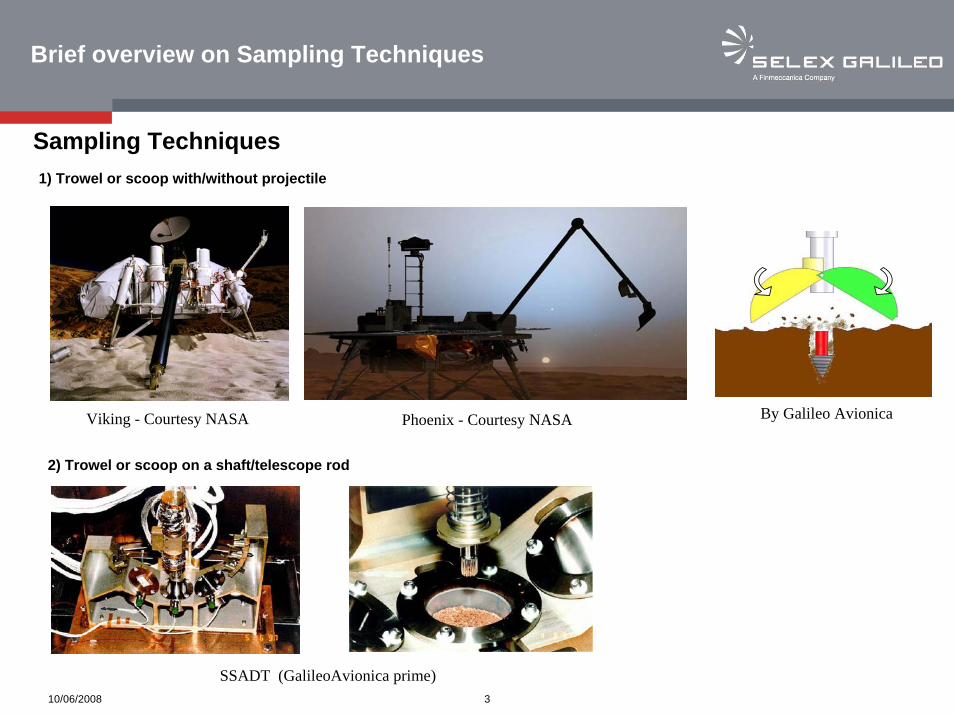
Sampling Techniques1) Trowel or scoop with/without projectile
Viking - Courtesy NASA Phoenix - Courtesy NASA By Galileo Avionica
SSADT (GalileoAvionica prime)
2) Trowel or scoop on a shaft/telescope rod
10/06/2008 4
Brief overview on Sampling Techniques (cont.)
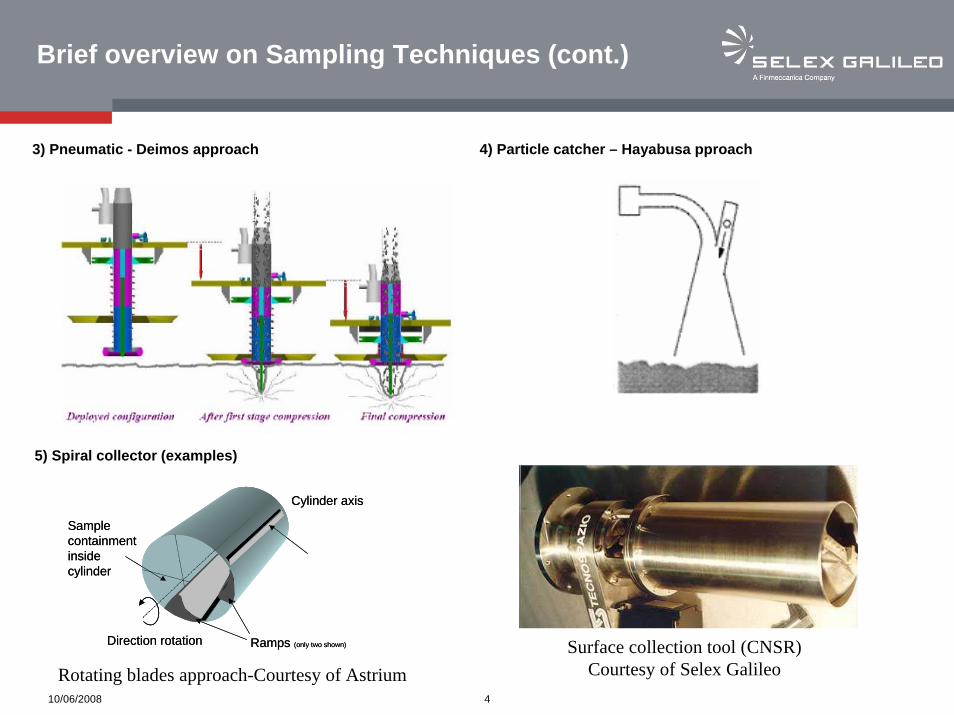
3) Pneumatic - Deimos approach
5) Spiral collector (examples)
Rotating blades approach-Courtesy of Astrium
4) Particle catcher – Hayabusa pproach
Direction rotation
Cylinder axis
Ramps (only two shown)
Sample containmentinsidecylinder
Direction rotation
Cylinder axis
Ramps (only two shown)
Sample containmentinsidecylinder
Surface collection tool (CNSR)Courtesy of Selex Galileo
10/06/2008 5
Brief overview on Sampling Techniques (cont.)
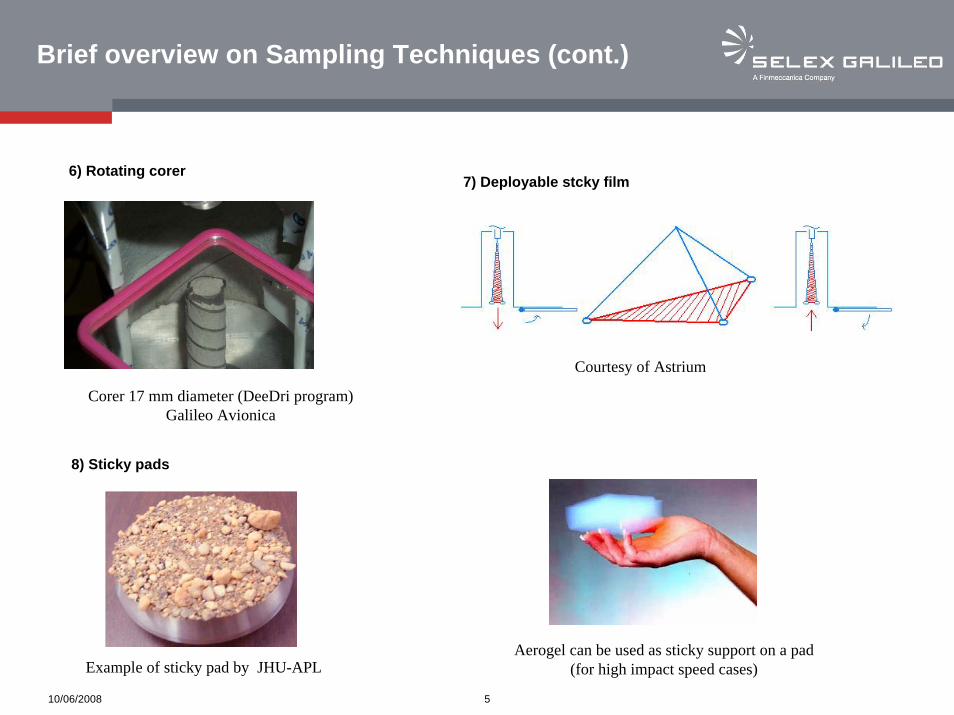
7) Deployable stcky film
Courtesy of Astrium
6) Rotating corer
Corer 17 mm diameter (DeeDri program)Galileo Avionica
8) Sticky pads
Example of sticky pad by JHU-APLAerogel can be used as sticky support on a pad
(for high impact speed cases)
10/06/2008 6
Brief overview on Sampling Techniques (cont.)
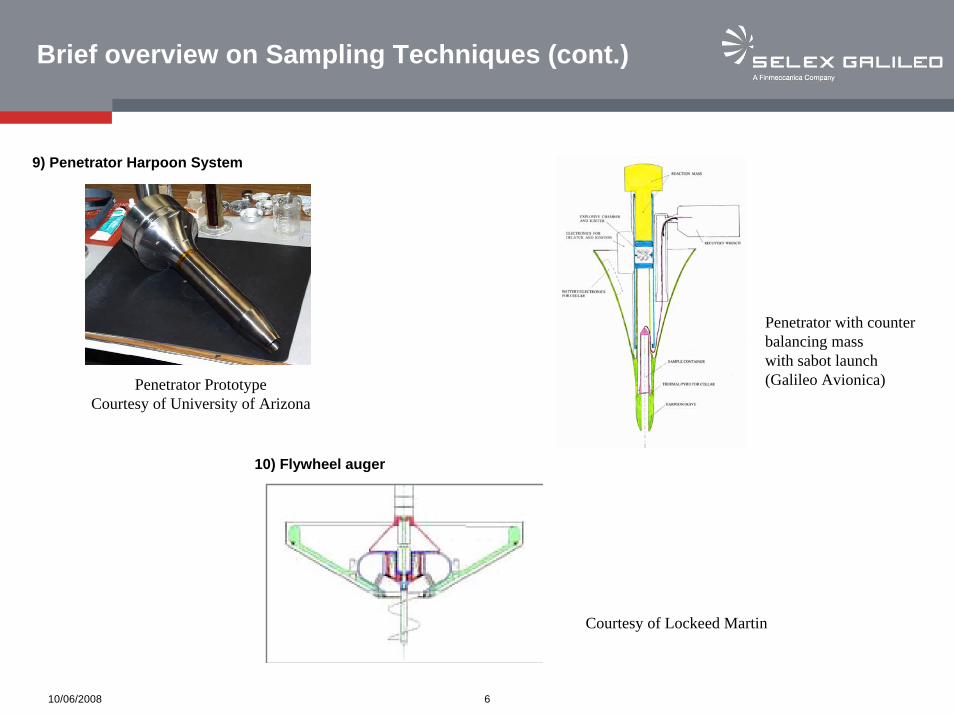
9) Penetrator Harpoon System
Penetrator PrototypeCourtesy of University of Arizona
Penetrator with counter balancing masswith sabot launch(Galileo Avionica)
Courtesy of Lockeed Martin
10) Flywheel auger
10/06/2008 7
Overview on Sampling Techniques (cont.)
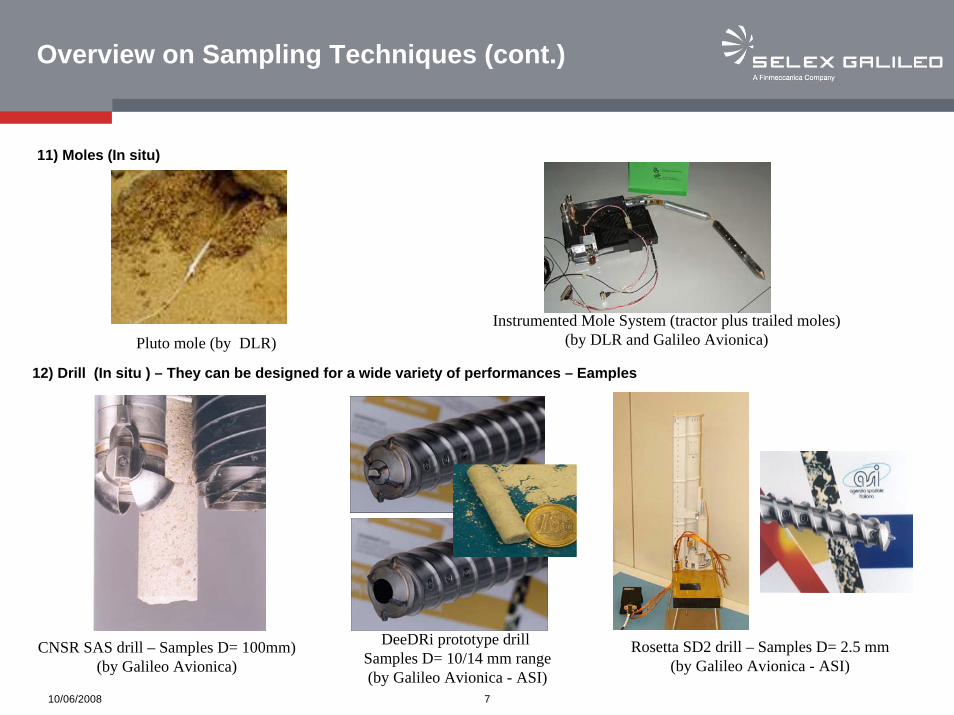
11) Moles (In situ)
Pluto mole (by DLR)Instrumented Mole System (tractor plus trailed moles)
(by DLR and Galileo Avionica)
12) Drill (In situ ) – They can be designed for a wide variety of performances – Eamples
CNSR SAS drill – Samples D= 100mm)(by Galileo Avionica)
Rosetta SD2 drill – Samples D= 2.5 mm(by Galileo Avionica - ASI)
DeeDRi prototype drill Samples D= 10/14 mm range(by Galileo Avionica - ASI)
10/06/2008 8
Overview on Sampling Techniques (cont.)
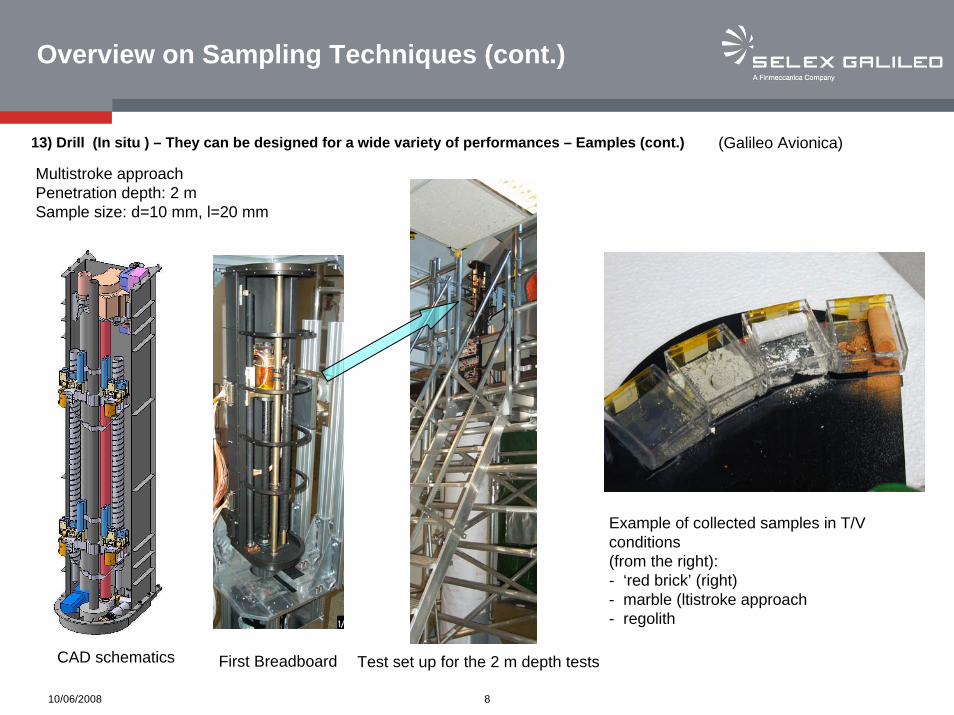
13) Drill (In situ ) – They can be designed for a wide variety of performances – Eamples (cont.) (Galileo Avionica)
Multistroke approachPenetration depth: 2 mSample size: d=10 mm, l=20 mm
Example of collected samples in T/V conditions(from the right):- ‘red brick’ (right)- marble (ltistroke approach- regolith
Test set up for the 2 m depth testsCAD schematics First Breadboard
10/06/2008 9
Type of missions
Possible missions classification
• Landing missions:Long stay (e.g. weeks/days)Short stay (minutes/tens of seconds)
• Touch and go missions:Max few seconds stay
• Hovering and go missions:Spacecraft at a distance from the surface (meter to several tens
of meters)
10/06/2008 10
Example of sampling Systems
Example scenario: landing with short stay (tens of seconds)
Based on:
• a fast and compact low mass articulation which can touch the surface with a sampling device (spoon shaped or cylindrically shaped) to grab the intended amount of material;
• the sampling device will implement a rotation in order to favour the penetration into regolith and a shutter device to hold low cohesion material with no need of compression;
• in case the requirement to collect very hard material (even in debris) were to be pursued, the sampling device can implement a projectile launched in a barrel with sabot which prevent sample contamination;
• the sampling device can implement internally some sheets of aerogel (to favour the collection of debris).
10/06/2008 11
Example of sampling Systems (cont.)
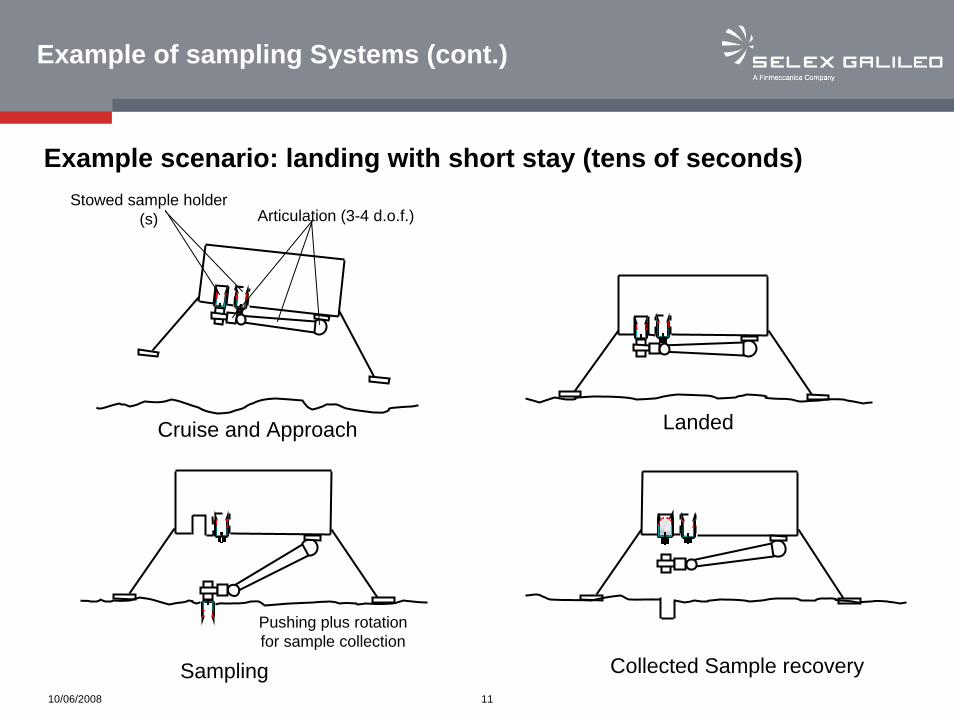
Example scenario: landing with short stay (tens of seconds)
Articulation (3-4 d.o.f.)Stowed sample holder
(s)
Pushing plus rotationfor sample collection
Cruise and Approach Landed
Sampling Collected Sample recovery
10/06/2008 12
Example of sampling Systems (cont.)
Example scenario: landing with short stay (tens of seconds)
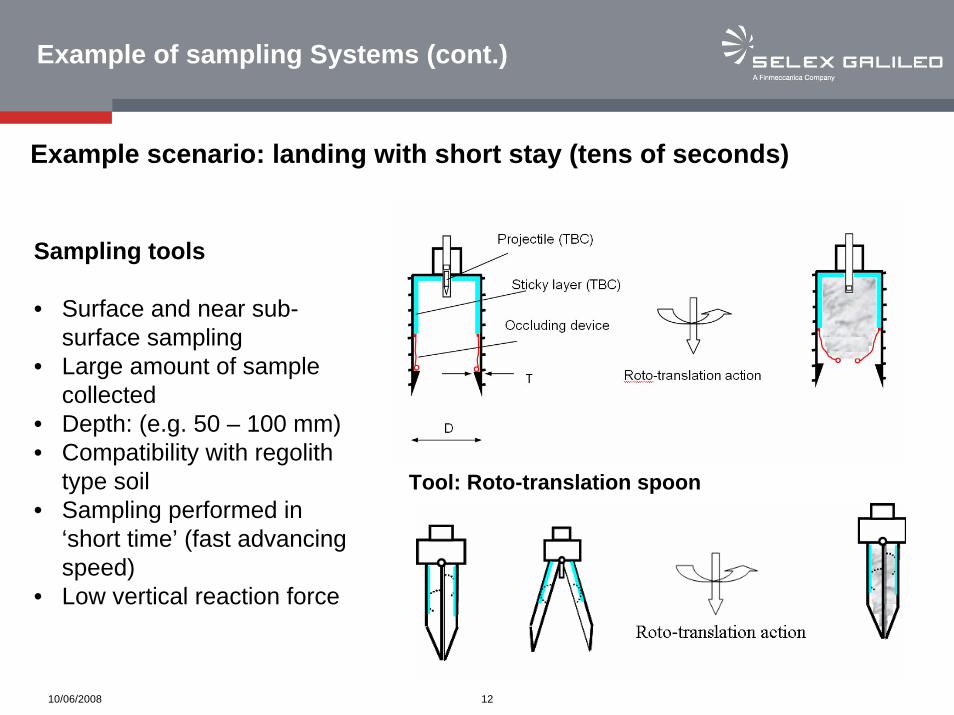
Tool: Roto-translation spoon
Sampling tools
• Surface and near sub-surface sampling
• Large amount of sample collected
• Depth: (e.g. 50 – 100 mm)• Compatibility with regolith
type soil• Sampling performed in
‘short time’ (fast advancing speed)
• Low vertical reaction force
10/06/2008 13
Example of sampling Systems (cont.)
Example scenario: landing with short stay (tens of seconds)
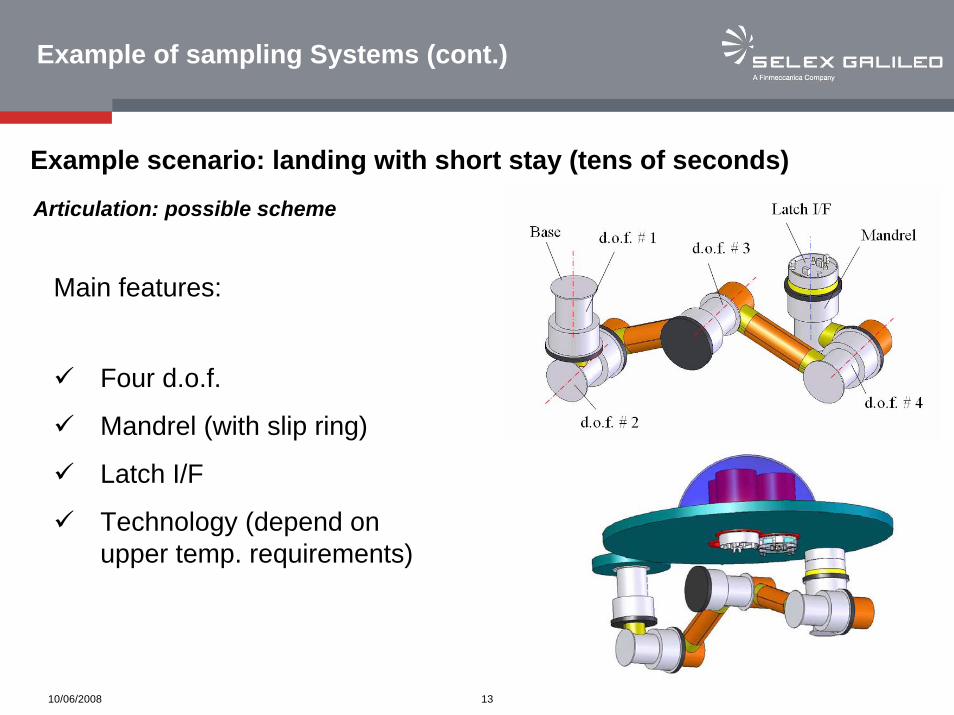
Main features:
Four d.o.f.
Mandrel (with slip ring)
Latch I/F
Technology (depend on upper temp. requirements)
Articulation: possible scheme
10/06/2008 14
Example of sampling Systems (cont.)
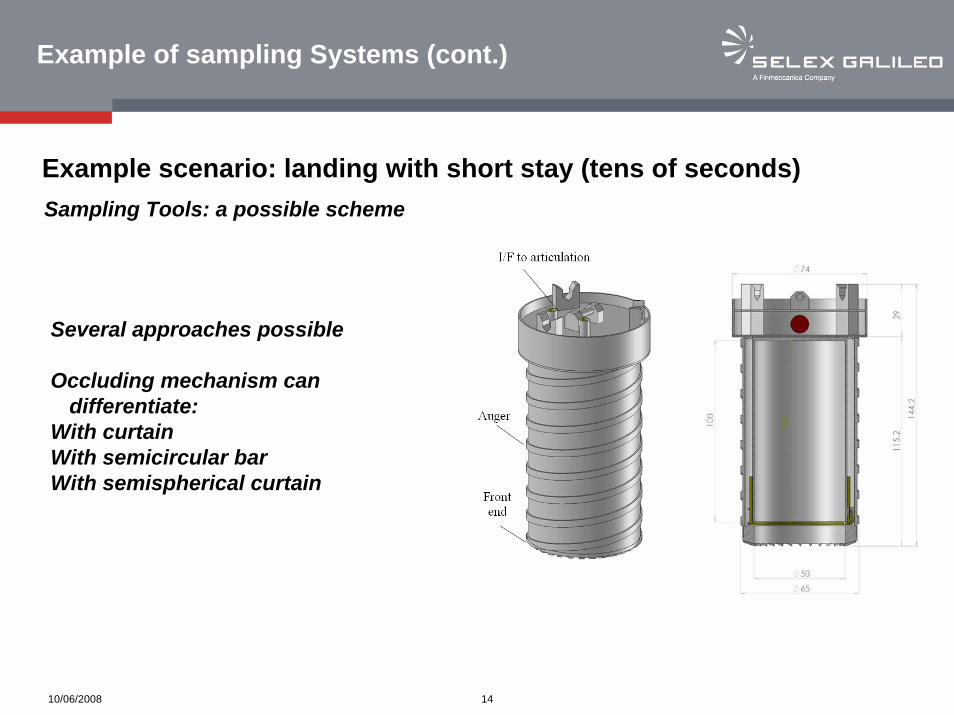
Example scenario: landing with short stay (tens of seconds)Sampling Tools: a possible scheme
Several approaches possible
Occluding mechanism can differentiate:
With curtainWith semicircular barWith semispherical curtain
10/06/2008 15
Example of sampling Systems (cont.)
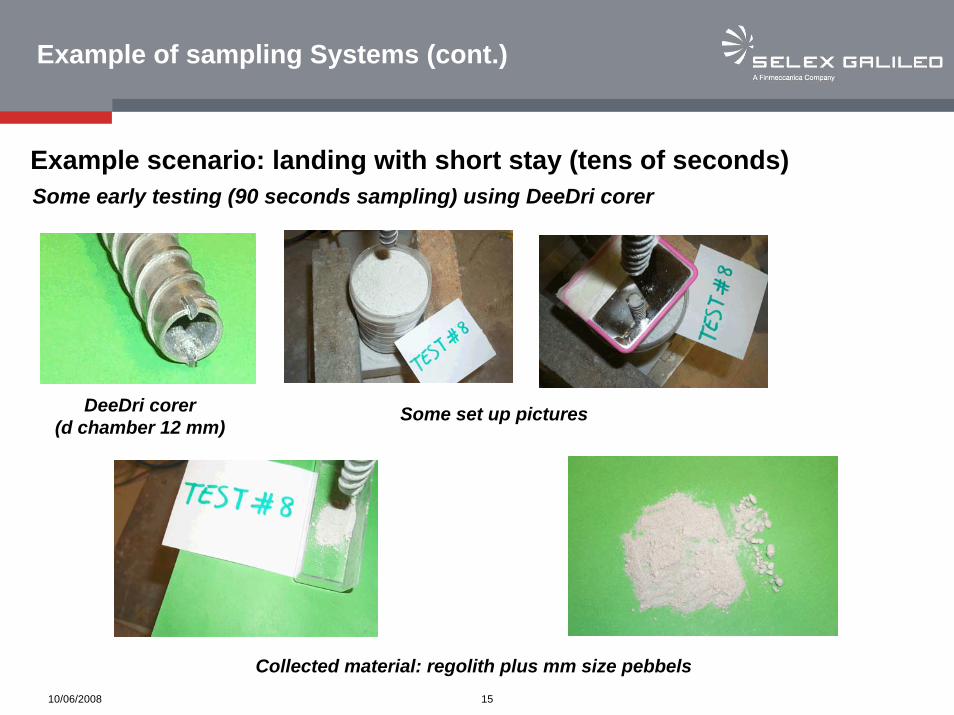
Example scenario: landing with short stay (tens of seconds)Some early testing (90 seconds sampling) using DeeDri corer
DeeDri corer(d chamber 12 mm)
Some set up pictures
Collected material: regolith plus mm size pebbels
10/06/2008 16
Example of sampling Systems (cont.)
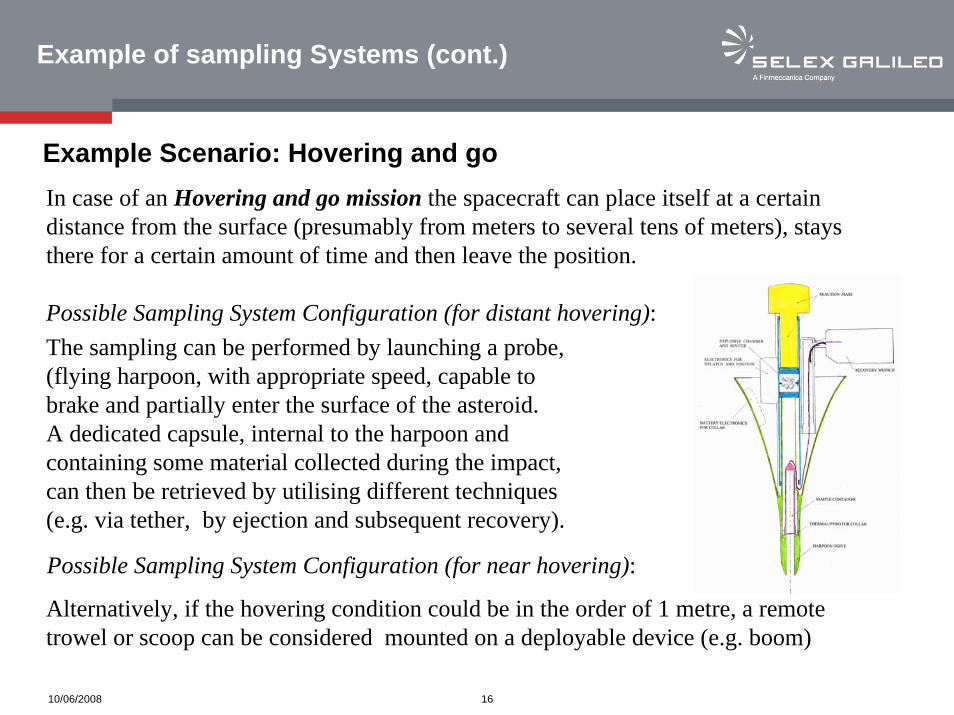
Example Scenario: Hovering and goIn case of an Hovering and go mission the spacecraft can place itself at a certain distance from the surface (presumably from meters to several tens of meters), stays there for a certain amount of time and then leave the position.
Possible Sampling System Configuration (for distant hovering):The sampling can be performed by launching a probe, (flying harpoon, with appropriate speed, capable to brake and partially enter the surface of the asteroid.A dedicated capsule, internal to the harpoon and containing some material collected during the impact, can then be retrieved by utilising different techniques (e.g. via tether, by ejection and subsequent recovery).
Alternatively, if the hovering condition could be in the order of 1 metre, a remote trowel or scoop can be considered mounted on a deployable device (e.g. boom)
Possible Sampling System Configuration (for near hovering):
10/06/2008 17
Example of sampling Systems (cont.)
Example Scenario: Landing with long stay
In case of Landing with long stay missions (plus anchoring) it is foreseen the landing and stabilisation of the spacecraft on the surface of the asteroid, similarly to the Rosetta Lander. Likely long time (e.g. hours, weeks…) is available in order to perform the sampling operations.
Possible Sampling System Configuration:
Suitably sized ‘real’ drilling system. The sample quality can be maximized. The anchored system need to provide adequate vertical thrust reaction capability to support the operations in hard materials.


![Dynamics of tethered asteroid systems to support planetary ...€¦ · PHA, connected to another asteroid with a tether [30,31]. The smaller asteroid is used as an artifact to perturb](https://img.pdfslide.us/doc/110x75/60583a145767825d430a9e7f/dynamics-of-tethered-asteroid-systems-to-support-planetary-pha-connected-to.jpg)


























