Embed Size (px)
Citation preview

Sfrr I e e 1. I sampling instants. A control systemamp ec -uata voantrol oystems otu ieo makes use of sampled data when it is im-possible to supply continuous data to all
rough Comparison, o Sampling with its parts. For example, if digital cmputers are used in control systems, thedata output from the computer must be
mp l itude Modu la tion supplied intermittently, hence the datasupplied the remainder of the control sys-tem from the computer will be sampled.
WILLIAM K. LINVILL In radar tracking of moving targets, theNONMEMBER AIEE information on the position of a given
target is supplied intermittently, at in-stants separated by the scanning period.
CAMPLING of a signal is compared to same way as it is done in the conventional In all cases wherein pulsed detectors areamplitude modulation by the signal studies of continuous-data systems. used on amplitude-modulated signals, the
of a carrier of regularly recurring unit im- outp of thetdetector signtermittepulses. The frequencyspectrum of the ~~~output of the detector iS 1intermittent,pulses. The frequency spectrum of the What Is a Sampled-Data Control being sampled at carrier frequency for a
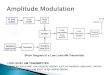
sampled signal iS periodic including the System and What Unique Problem half-wave detector or at twice carrier fre-spectrum of the pure signal plus some Does Its Analysis Present? quency for a full-wave detector. In allcomplementary or ripple signals. Smooth- pulse-modulation systems, the data sup-ing of sampled data is simply filtering to A sampled-data control system is one plied by the pulsed signal is intermittent,remove the ripple. With this point of wherein the signal supplied to one or more being given only at the instants when theview both sampled and unsampled data parts of the system is not given continu- pulse occurs.may be analyzed by the conventional fre- ously in time, but is supplied at discrete If the sampling frequency in a systemquency domain analysis familiar to engi- values of the time variable, t. In such a being supplied intermittent data is highneers. A system containing some parts system, the part of the system being fed enough compared to the signal frequencyoperating on sampled data and some parts intermittently might, for example, have and to the critical frequencies of the sys-operating on continuous data can be an input signal applied to it at t= 0, T, tem, then the fact that the data are nothandled entirely by a simple extension Of 2T, 3T, ... (where T is the length of time supplied continuously has no importantconventional frequency analysis. By this between samplings) with no data at all implications and the whole system be-technique a given feedback system can be supplied in the intervals separating these haves essentially as a continuous system.analyzed for stability and the exactnature of its output as a continuous timefunction can be predicted. The analysis ERRORis simple enough so that the design of a INPUT DEULINEARINPUT 0. ~~SECTION 0. OOUTPUTsampled-data servo system is as direct asthe design of a conventional system. FEEDBACK LOOPThe prediction of the effect of cascadedfilters and compensating networks onsystemsanperformaensatincegpro s ine te (A) SERVO WITH CONTINUOUS SIGNALS THROUGHOUTsystem performance proceeds in much the
Paper 51-324, recommended by the AIEE Feedback ERRORControl Systems Committee and approved by the DETECTOR LINEAR INAIEE Technical Program Committee for presenta- CONTINUOUS SECTION HOLDING OPERATINGON (CONTINUOUStion at the AIEE Fall General Meeting, Cleveland, INPUT SAMPLING OPERATING ON DEV1ICE CONTINUOUS OUTPUTOhio, October 22-26, 1951. Manuscript submitted SWITCHSAPEDTA IAAMarch 28, 1951; made available for printing August lI28, 1951.IIWILLIAM K. LINVILL is with the Massachusetts (DATA HERE ARE SAMPLED) I(DATA HERE ARE CONTINUOUS)Institute of Technology, Cambridge, Mass.lIThe research described in this paper was part of a |IAPLNdoctoral research program done in 1949 in the SWTGServomechanisms Laboratory at MassachusettsInstitute of Technology under Navy ContractN5ori6O. The author wishes to acknowledge his (B) SERVO HAVING SAMPLED DATA IN ONE PART OFindebtedness to Professors E. A. Guillemin, M. F. THE SYSTEM AND CONTINUOUS DATA IN THE RESTGardner, and G. S. Brown, and to his colleagues onProject Whirlwind for their valuable assistance incarrying out the research and in the preparation of Fgr .Acnetoa ev n n aigasmlddt etothis paper. Fgr .Acnetoa ev n n aigasmlddt eto
1951, VOLUME 70 Linvill-Sampied-Dcata Control Systems 1779

f(t) Figure 2. An linear difference equations. Essentiallyexample of sam- the approach they use is to describe the
pled data signal in terms of sequences rather thancontinuous time functions even in those
' |f, 2 6/ 1 ; > parts of the system receiving, operating
fo f31 \ Xf5 f7 ,on, and transmitting continuous data.0 T 2T 3T \4 T T 6T 7T 8T Such a procedure describes the whole sys
tem in terms of one kind of data and al-lows a thoroughgoing study of system
When the sampling frequency cannot be system with sampled error. A simple stability, but it is so cumbersome that al-made high enough for this to be true, servo without and with error sampling is most nothing more than stability can bequite clearly the system will not behave shown in Figure 1. The basic difficulty in studied. There are two serious short-as a continuous system. describing sampled-data servomecha- comings in this point of departure: (1)Sampling of data often occurs in high- nisms arises because part of the system in much of the system continuous signals
accuracy systems employing feedback. operates on sampled data and part of it are received and transmitted so that manyThe basic objective in the use of feedback operates on continuous data. For that of the elements of the system could bein any control is to allow a high-gain, or part which operates on continuous data, properly and very conveniently describedhigh-power controller of very low ac- conventional analysis in the frequency by conventional transfer functions, andcuracy to be monitored by a low-power domain is the best tool to use in the study (2) the output is continuous and should behigh-accuracy measuring system placed of system behavior. For that part of the expressed as a continuous function ofin the feedback loop. Such a system must system which receives, operates on, and time, rather than as a sequence. Oneemploy a sensitive error detector. As is transmits sampled data, the use of se- needs a more complete picture than iswell-known, when the gain of the feed- quences and linear difference equations is given by knowledge of the output only atforward section is increased, the over-all a very useful analytical approach. For a the sampling instants, but such informa-accuracy of the system is increased, but single system having a part operating on tion is hard to get from the differencethe problem of stability becomes critical. continuous data and a part operating on equation approach.The system may become unstable when sampled data, the analysis would be This paper presents a procedurethe gain is increased; for example, if greatly facilitated by a single technique whereby the whole system, sampled-datathere is too much difference in phase be- which would work conveniently on both or not, can be described in terms of con-tween the error signal and the resulting the continuous-data part of the system tinuous time functions. The resultingoutput. If the error signal is sampled in- and on the sampled-data part. The two study of sampled-data systems becomesstead of continuous, the stability problem obvious approaches to this problem are: as easy and direct as the study of contin-becomes more acute and also harder to (1) the extension of the analytical method uous-data systems. There are two typesinvestigate. It is certainly possible to of sequences to the continuous part, (2) of junctures in a sampled-data controlhave a system which is perfectly stable the extension of the conventional methods system which require special attention:and satisfactory when the error data are using the frequency domain to the (1) points where continuous data aresupplied continuously but which becomes sampled part. The first method has been sampled, and (2) points where theunstable when the error is sampled. exploited, as will be reviewed in the next sampled data are smoothed and fed to aThough the point of view presented in paragraph. The second method is intro- continuous-data part. Once the phenom-
this paper is applicable to many types of duced in this paper. ena at these junctures are properly ex-sampled-data control systems which do Stibitz, Shannon, Hurewiez, and others amined, one has merely to study the con-not use feedback, the main emphasis will have studied sampled-data control sys- tinuous-data part by conventional pro-be placed on a study of a feedback control tems by use of sinusoidal sequences and cedures and to formulate some analogous
ICARRIER II Figure 3 (left). How an impulse modulator eKfectively samples
SIGNAL IMPULSE OUTPUT the continuous time function of Figure 2f (t) MODULATOR f (t) * i (t) o (t)
(A) THE DEVICE Figure 4 (below). Vectors describing a single exponential input tothe impulse modulator and the resulting output
i(t) ALL IMPULSESHAVE UNIT AREA.
OT 2T 3T 4T 5T 6T 7T t | ) t T lV+<14 T 2AAAT(B) THE UNMODULATED CARRIER +C+ .+
o(t) ~~~~~~~~~~THEIMPULSE aT |X K j ' ~~~~~t=nTHAS AN I
t 1 ~ ~tf AREA 'fng.SflO T ~21 3T 411 5 61 7T
(c)THE MODULATED CARRIER INPUT OUTPUT OF lIMPULSE MODULATOR
1780 Linvill-Sampled-Data Control Systems AIBE TRANSACTIONS

IF(W)I 10(W)IxT AXIS
$./ X\- STRIP 2
INPUT OUTPUT OF IMPULSE MODULATOR)C -STRIP I
Figure 5 (above). Amplitude spectrum of an input to the impulse -modulator and of the resulting output -.,,,--STRIPO
O AXISFigure 6 (right). Because of periodicity, 0(s) has the same values at J
corresponding points in any two strips of the s-plane --7STRIP -I
procedure for studying the sampled-data._part. Before this formulation is presented ~~~STRIP -2here, the nature of events at the indi-cated junctures will be investigated more __ _closely.
Sampling Analogous to Impulse where 0=2ir/T, the sampling frequency, s by integral multiples of sampling fre-Modulation
and an's are the Fourier coefficients. By quency jQ. For s=jw, the situation may
The first problem of this paper is to de- performing the Fourier analysis it fol- be pictured graphically as in Figure 4.scribe sampled data in a form which is lows Since responses of the modulator arefamiliar to engineers and which allows it i T/2 additive, each signal component isto be treated by conventional Fourier an i(t)e "dt (2) handled independently. If a signal hav-analysis. In Figure 2, f(t) is a continuous TJT/2 T ing an amplitude spectrum, F(oX), astime function which is sampled at reg- The impulse modulator output o(t) i shown in Figure 5, is applied at the inputularly spaced instants. In describing of the impulse modulator, the modulatoronly the sampled data, the continuous output, 0(w), will be as indicated. Thefunction f(t) is replaced by the sequence o(t) =f(t)nXi(t) =Ae3t l t (3) Fourier transform of the output is related
fo, fl,f2 ... To avoid the use of sequences T to the transform of the input by:in describing sampled data, a fictitious a)analogous situation will be invented Carrying out the multiplication term by 0(,w)= F(+nQ) (5)wherein the data have precisely the same term, it follows Tinformation as that implied by the se- n=-c
quence but wherein the data are described A It is impossible to describe the operationby time functions rather than by se- o(t)0 T
A e(+JnU)t (4) of the modulator by a transfer functionquences. Suppose that the time func- n-co because the transform F(s) cannot betion, f(t), is used to modulate a carrier multiplied by any function of s independ-made up of a string of unit impulses. Call Thus application of an input signal of ent of F(s) which will yield the transformthe time function describing the un- complex frequency s to the impulse 0(s), since the latter is related to F(s) by amodulated impulse wave i(t). The out- modulator results in an output com- summation or convolution and not by aput of the impulse modulator would then ponent which is the exact input multi- multiplication.be i(t) Xf(t), or a string of impulses whose plied by 1T, and an additional output Note that the transform of the impulsesuccessive areas bear a 1-to-i corre- component of frequencies differing from modulator output is periodic. O(W) asspondence with the sequence fo,fl,f2 . . .
A picture of the fictitious situation de-scribed above is given in Figure 3. In
A
short, the process of sampling is entirely Aanalogous to the process of impulsemodulation. The great advant-age of the T I | | [ A [ < | g 0 0 llatter point of view is that it allows the B >wuse of conventional Fourier analysis. Ii \ \|/\|t\ >
Consider now the response of the im- -____\ 5 ,, lpulse modulator to a single exponential IC II1 I I I Cinput f(t) =AESt. A Fourier analysis may Figure 7. High- |+be made of the impulse train, i(t)- The frequency input sig-form of the exponential Fourier series nals are lost in the __ _
will be: ~~~~~~~Threeinput signals l ll | -n l Q 2Q W
i(t) = E atneJflUt (1) and corresponding INPUT SIGNALS CORRESPONDING OUTPUT SIGNALS FROM THEn =-cs ~~~~~~~outputs IMPULSE MODULATOR1951, VOLUME 70 Linvill-SamXpled-Dcttc Control Systems 1781

[CARRIER] Te<
HOLDING
a. Z ~~~~~~~~~~~~~~~~~DEVICEI-oH
0 f2SAMPLINGULEf f6 SWITCH MODULATORL I
f4
Figure 8. Smoothing of the samples of the curve Figure 2 by clampingACTUAL CIRCUIT EQUIVALENT CIRCUIT
Figure 9. A closed-loop servo system with error sampling and itsequivalent circuit
defined by equation 5 has the same valuefor any two values of c which differ bykQ. The s-plane can be divided into Result (2) * is that no signal of higher in Figure 7. There would be no confusionstrips as in Figure 6. 0(s) has the same frequency than Q/2 is transmitted by a as to what was pure signal and what wasvalue in strip 1 as it has at corresponding sampling device, and it can be observed complementary signal in the case of thepoints in strip 0, strip -1, strip -2, . that by comparing signal A to signals B and C output to signal A. However, for input
is O(s)=O(s+i*0)- ~~~~~~~~~~~~~signalB and signal C, which themselvesis, 0(s) = 0(s+jkQ). *This result has been stated as a sampling theorem s B a s
The Fourier transform of the sampled by C. E. Shannon. are radically different, the impulse modu-data should be expected to be periodic.Recall that the Fourier transformation ofa periodic time function yields a Fourier RIEseries which is represented by a set ofsamples (impulses) in the frequency do- '"i(s) E(s) K-0s40(s) -0-4L(S) 'G°A(S)main. The Fourier transformation of a r sset of samples in the time domain shouldaccordingly be expected to yield a periodic
/3,(s)~~~~~~~~~~~~~~32sfrequency function.The impulse modulator has two funda-
mental characteristics which are seendirectly from its description in the fre- 0i(s+jmA)quency domain: E(s) = lds) M=As-= m 0o
1. The impulse modulator output contains IK131 (s) +EK22 (s + j n iL)the exact replica of the input as well as un- °°wanted or complementary* signals.
OA IS PURELYA SAMPLED SIGNAL AND IS OPER-2. Any input signals of frequency greater ATED ON BY THE LOOP AS IF THE LOOP DEALTthan 0/2 = r/T get mixed up with comple- ONLY WITH SAMPLED SIGNALS.mentary signals and can never be regained. (A) EQUIVALENT CIRCUITS OF THE TWO SYSTEMS.
Figure 7 gives the amplitude spectra ofthe input and output of the impulse CARRIERmodulator for three different signals. For 00result (1) consider signal A. The output qe.4L(S) E(s) IM.((S jM ( )signal of the modulator can be divided CONTINUOUS I+K,f3,(s) CONTINUOUS SAMPLED I+EK2/32 SAMPLEDinto two kinds, pure and complementary INPUT ERROR CONTINUOUSI INPUT ERRORsignals. The pure signal is the one com- INPUT PERIODIC SYSTEMponent of the output which is centered SAMPLED FUNCTION OPERATINGCONTINUOUSI SMLD ON SAMPLED INPUTaround zero frequency. The comple- DATA DATA O YIELD INPUTTO YIELD SAMPLEDmentary components are those centered ERROR.aroundng when n#O_0. The pure signal is (b) EQUIVALENT CASCADED SYSTEMS RELATING ERROR TO INPUT.an exact reproduction of the input in am-plitude and phase characteristics. Thecomplementary signal components have CARRIERamplitude and phase characteristics iden- 1tical with the pure signal output, but are X s I= () '4() 'G1s e~ASmerely shifted in frequency from the pure I+K lj3 KI I+EK2/32 II Isignal by nQ. The way to regain the CONTINUOUSI SAMPLED CONTINUOUSactual input signal from the modulator DATA I DATA I DATAoutput is by filtering to cut out the com- SAMPLED DATA ARE SMOOTHED BY THE TRANSFER
plementary signalsand leave only the ~FUNCTION K2(s) BECAUSE IT IS NOT PERIODIC.pure signal, as willbe discussed later. ('c) EQUIVALENT CASCADED OVERALL SYSTEMS.*Thestr. cmlmnay wssgetdb .F Figure 10. A comparison between a sampled-data control and a conventional type
1782 Linvill-Sampled-Data Control Systems AIEE TRANSACTIONS

6 7 KI3 OR F-KB-PLANE td,_ _ 5 _t_~~NO IN_PUOUPU
K2 l r I I LOUTPUT
\ / ~~~~~~LOCUS OF KB
4 1
Figure 11 (left). Steps in obtaining 2Kf locus from K,B locus
Figure 13 (above). Feedback monitors the output in a continuoussystem
\/ \|LOCUS OF 7-KS Rwhich is a pulse of unit height and length3L O T. The transfer function of such a filter is1\/s(l _e-T). This is a low-pass-filter
than low-pass filtering. The effective characteristic with a slow cutoff. The pro-
ness of the smoothing of two different portion of complementary signal passed2 systems can be judged in the frequency by the filter determines the amount of
system can be judged in the frequency "ripple" in the smoothed output. Indomain by conventional procedures. general, the specification of the smoothing2 Often in the sampled-data section, the filter is a typical filter problem which can
data are in some coded form, such asl~~ ~ ~ ~plecd mouain or pulsewidt be handled by conventional procedures.pulse-codemodulationan t conversin f Theoretically, at least, if good smoothingmodulation and the conversion from swne,telg hc r neetisampled data to continuous data involves
some con o oa low-pass filter must be tolerated. Sincesome conversion operation in addition to th carteiisofbh ueanlator outputs are identical. When fre- filtering. One very popular type of filter- the characteristis of both pure andquencies of pure and complementary sig- ing used in conjunction with such a con complementary signals are known, thenals overlap, the pure and complementary version device is called clamping. When Wiener-Lee method for specifying opti-signals cannot be unscrambled, therefore a converter output is clamped the pro- mum linear filtering is applicable.signals of frequency Q/2 or greater just cedure is to hold the latest sample until a Analysis of Sampled-Error-Datacannot be transmitted by the sampling de- new sample is supplied. Fignre 8 shows Servo Systemsvice. Thus, a fixed sampling rate im- how the sequence of samples of the curveposes a limit on the frequency band of the of Figure 2 could be reconverted to con- With the description of the operation atsignals that can be transmitted, and for tinuous data by clamping. If the suc- the two important junctures in a sampled-signals of higher frequencies it is necessary cessive samples have little relative change, data control system, the analysis problemto increase the sampling rate. the clamping can be used successfully. would be well in hand if a description
If successive samples are very different, could be made of the operation on theSmoothing of Sampled Data Is the use of a clamper is ineffective be- signal by the continuous-data part of the
Linear Filtering cause it "remembers stale data." Study system and the operation on the signalof the clamper in the frequency domain is by the sampled-data part of the system.
When sampled data are fed into a con- very simple and enlightening. The pur- The operation of the continuous-data parttinuous-data section of a control system pose of the clamper is merely filtering the is readily described by conventional trans-the problem of smoothing the data is im- complementary signals out of the pure fer functions. AIlany sampled-data con-portant. From the preceding frequency signals. Use of a clamper is the equivalent trol systems have no operation on sampledanalysis of sampled data, the problem of of applying the impulse-modulated data data except storage, so this paper will besmoothing is seen to be nothing more into a filter having an impulse response confined to cases wherein no operation is
N NN, I, \Figure 12 (left). Loci of 2K3 for a stable and an unstable system
\ Figure 14 (below). Feedback monitors the output in a sampled-I / \ ~~~~~~~~~~~~~~~error-datasystem
: \ ~~~/ g/ MODULTORU
- -- <(A) STABLE (B) UNSTABLE
1951, VOLUME 70 Linv'ill-Sampled-Data Control Systems 11783

made on the sampled data other than this reason, the signal at point A is easier are not interested in at the moment).storage. With the recent development to describe analytically than the signal Each single component term -4'AKI(sl+of high-speed digital computers the at any other point in the closed loop. jfQ)E(sI+jnQ)t of the fed-back signal willfeasibility of operating on the sampled This fact leads one to investigate the rela- yield a modulator output componentdata is greatly enhanced. In a research tion between the signal at point A in -(bAK#(sj+jn2)e"1t (as well as other out-study by John Salzer and the author, an Figure 9 and the input signal. put components which we are not in-analysis of linear operations of digital Suppose the input to the control system terested in at the moment). Thus thecomputers by use of transfer functions is has only one frequency component. first term on the right side of equation 7made. The transfer functions have the Such an input might be described by will besame periodic character as the Fourier equation 6, co
transforms of sampled data. The point of e_(t)= sit () Ae81 =if slt- st lt E K(s+jnQ) (10)view which describes sampled data as the nS(6) nt =-Z(equivalent of a modulated wave of unit The input to the impulse modulator will Similar results can be obtained for anyimpulses makes it possible to describe all contain not only Oi(t) but also all the fed- term of equation 7, as indeed it was notedparts of a sampled data control system by back signals. All these signals will be re- that all complex amplitudes are (.frequency analysis. The only restriction lated to the value of 0. The signals 6O Solving equation 10 for ?A yieldson the system is that it operate on the are all linearly related to the signals atdata in a linear fashion. point A, Figure 9. Since the input signal "D=The present section will treat the O0(t) has only a single frequency s1, and 1+ K3(Sj+jnQ)
analysis of a sampled-error-data servo- since new frequencies are introduced into n1 Kcomechanism which has no dynamic ele- the system only by the impulse modu-ments operating on the data while it is in lator, the permissible frequencies at any Equation 11l leads to a very useful result.sampled form. Figure 9 shows such a point in the system are sj+jnQ. No For an input 0X(t) of any single complexsystem along with its equivalent circuit. signal of any other frequency exists at any frequency sothe signal at point A is givenThe combination of sampling switch and point; furthermore, at point A all per- as a function of time by combining equa-holding device is replaced by the com- missible signals exist and have equal com- tions 7 and 11; that is,bination of impulse modulator and filter. plex amplitudes. Call this complex am- X ,oif(8j+jMi)tThe effect of the impulse modulator is in- plitude ")A; then signal at A is given by 6A(t)= c (12)dicated in equation 5, but the l/T factor A(.s+j)t +, >(8j+f2Q)t+ 1 + E K,S(s,+jnf)is now transferred to the filter. This OA((tAzS1t+JAeS+ ±,FA(RI)+ - CD n = -co
arbitrary transfer makes the pure com- '3Aej2+ ±.'Ej'-7 Since the coupling between point A andponent of the modulator output equal tQ bA(i+Af +.... (7) the servo output is made by a purely con-its input and will facilitate further analy- If the fed-back signal was known, (A ventional linear element, the complexsis. The holding filter has low-pass char- could be found The fed-back signal may output signal is 4A multiplied by the con-acteristics, as defined by its transfer func- be found .t hefed-back signal may ventional transfer function. Thus thetion HE(s), which is the transform of its be found in terms of(JAand K3. Call the amplitude of the output componentunit impulse response. For reasons stated fed-back signalOf (t) having frequency (s+jm) is AK(s+above, HE(s) is changed to HE(s)/T and Orj,(t) =-1A[K3(ss)eSit+ jmQ). Summing the output componentscan be combined with the rest of the feed- KP(sl+jQ)E(S1+ijWt + and using equation 11 one obtains theforward section H(s). The product HX Kf(s1+j2o)X(e(s1+j 2n)t+ output time function,(HEIT) is called K(s) and considered a Kg(si_jQ)ef3 -Jn)'+ 4iK(sl+jmR7)e((st+imj)1single transfer function. Kp(si+j22)E(8J+J2n)t+l] (8) 0o(t)=Z 13+(3)APPLICATION OF THE EQUIVALENT The signal input to the impulse modulator m__- n -co
CIRCUIT TO THE STUDY OF A SAMPLED- isEIRRUITTORATASERSTUDYSTE ASAMPLED- iSBecause of the fact that a sampled-dataERROR-DATA SEVO SYSTIEM cocontrol system is a linear device, one can
The one interesting phenomenon which Oi+Ofb =iEt-4A , K1X superpose responses and relate the Fouriermakes a sampled-error-data servomech- (S1 +jn9)f(s1+inwt (9) transform of the output of such a systemanism somewhat harder to analyze than a to the Fourier transform of the input byconventional servomechanism is the fact Equation 9 shows that the input to the merely extending Equation 13. Wherethat complementary output signals are impulse modulator may contain all per- one had a simple input 0(t)=4te"t, thefed back and enter as error signals into missible frequencies with unequal am- output was given by equation 13. Ifthe sampling device where they contribute plitudes, yet its output can be no more sj=jcoj and represented the input and theto the pure output. Refer to the output complicated than indicated in equation 7. output in the frequency domain, theof the impulse modulator (point A) in It remains to relateIIA to the input, equa- Fouer analysis of the input would leadFignre 9. It has already been pointed out tion 9. As already noted ,1A is the com- to a single line spectrum, |4i|, at .o forthat at the output of the impulse modu- plex amplitude of any of the terms of the input spectrum. The output spec-lator all components differing in fre- equation 7. For the sake of simplicity trum would be an infinite number of linesquency by nQ2 have identical complex am- pick the E1l term of the signal at point A separated by Q~. The spectrum for pointplitudes. This is so regardless of the and ask: How do the various input signal A, after the impulse modulator, wouldnature of the signal at the input of the components of equation 9 contribute to have lines all having the same length,impulse modulator. The same is not true this single term ESlt of the modulator out-at any other point in the system; for ex- put? Clearly 4bEslt leads to a modulator sample, O, being continuous will not be output 4eS,t (as well as otheroutput com- 1+ z K,8(jwi-jnSl)periodic in the frequency domain. For ponents of complex frequencies which we n= -s
1784 Linv'ill-Sampled-Data (Control Systems AIEE TRANSACTIONS

At the output the same frequencies the steps in obtaining a IKj3 from the inverse Fourier transformation breakswould be present as were present at A, Kf3 locus. First lay out the K,B locus and down on the problem of composition ofbut the respective amplitudes would be mark off on it the w-values. For the locus output components into a time functiondifferent because of the filtering proper- shown, the sampling frequency is 10 output when the system is unstable. Theties of the feed-forward section after the radians per second. Because the value of inverse Laplace transformation is stillimpulse modulator. Kfl is small for w> 10, only the two low- valid because the transformation integralThe preceding discussion is nothing frequency terms of Kf need be considered. is not evaluated along the imaginary axis
more than an interpretation of equation As an example, to find ZK/3 for cw =4, add in the s-plane as the inverse Fourier in-13. Now, suppose that instead of apply- Kf(j4)+K13(j4)+K3(j24)+ . . + K/3 tegral is, but along a vertical line to theing an input having a single term in its (-j6) +K13( -jl6) + .... All terms ex- right of all singularities, and hence theFourier transform, one applied an input cept K,B(j4) and K/(-j6) are negligibly growing exponentials in the resulting timehaving a Fourier transform Oi(s). The small. The addition of these two terms is function are adequately handled.Fourier transform of the signal at the indicated by the vectors K3(j4) and With the assurance that the Laplacepoint A would be b=Kf(-j6) in Figure 11. The process is transform approach is valid even for un-
co repeated for w =5, 3, 2, et cetera. If it is stable systems, one now passes to theE O(s+jmu) wished to form 2Kf for co= 6, it would application of it to test stability. One
eA(5)= m ,, (14) be found to be the same as 2Kj3 for could say that a system is stable if its re-
1+ E Kf3(s+jnQ) = 6-10=-4 which is the conjugate of sponse to any bounded input has no grow-n- -oo ZK for w = 4. Once the 2Kf locus is ing exponentials; that is, the transform
found, the system function K/1+2Ko, of the output has no poles in the rightIt follows that the output transform is is found exactly as in the conventional half s-plane. Reference to equation 15
O,(s) =K(s)OA(s) case. When the engineer has the necessary indicates that the right half-plane polesco loci for a given system, what further of On(s), the transform of the output, can
E oi(s+jmu) problems does he face? Essentially there only come from the denominator ofm=-0o K(s) (15) remain three questions: equation 15, because neither the trans-
oK,(s+jnQ) 1. Whatisthestabilityofthesystem? form of the input nor K(s) will have poles1+ Z in the right half-plane. The sufficient2. How well are the complementary signals condti fri stabl of The systemiis
So far as the quantitative description of filtered out at the output? condition for stablity of the system iSSohfarsys themcharactleristics r ofaspd
3 How effective is the feedback link in that the 0's of 1+2K3 be in the leftthe system characteristics of a sampled-.... monitoring the output? half-plane. This condition is equivalenterror-data servomechanism iS coneemed, to saying that the - l's of 2K13 lie in leftequation 15 gives a complete story. Its INVESTIGATION OF STABILITY half s-plane. Since 2K,3 is periodic in sphysical significance now will be ex- In the study of linear continuous-data of period jQ, all its -l's come in groups.plored. systems two avenues for determining If there be one -1 of 2Kf in right half-A sampled-error-data servomechanism stability are available: (1) the location of plane there will be an infinite number
has so much in common with a conven- the roots of the characteristic equation of -l's each separated by multiples oftional continuous-error-data type that a obtained from the differential equation j1 from all the rest. The Nyquist plot iscomparison of the two is enlightening. describing the system, and (2) the loca- still a valid and convenient way to testFigure 10 pictures such a comparison. tion in the s-plane of the poles of the sys- for the presence of -1's in the right halfParts (A) and (B) of this figure draw an tem function. In the case of conventional s-plane. Figure 12 shows ZKO loci of aanalogy between the error sigual E(s) of a linear systems operating on continuous stable and an unstable system.continuous-data system and the sampled- data, both procedures are usable and re-error sigual 0A of a sampled-data system. sults agree, but for linear systems operat- PRESENCE OF COMPLEMENTARY SIGNALSIn spite of the fact that the servo loop en- ing on both sampled and continuous data IN THE OUTPUTclosing the impulse modulator has a only the second method, essentially that Since the output of the impulse modula-major section which receives and trans- of Fourier or Laplace transformation, is tohapuendcmletrysgasfmits continuous data, the loop signal, usable because differential equations can- torhas pure andomplementary signalsofOA, at the output of the impulse modu- not be used directly with sampled signals. equal size the only fastorwhi(h sup-lator has characteristics entirely like the Recall that the use of Fourier or La- presses eomplementary signals (those foroutput of a system operating entirely on place transformations to analyze a super- m 0) before they get to the output is thesampled data. The error, though sampled, plaee temas to steps, smallness of K(s+jmS) compared to
is smoothed by the filter K2, which has posable system has three steps K(s). In short, to suppress complemen-nonperiodic characteristics. 1. Transformation of the input. tary signals, K must be made to have low-A good picture of the operation of the 2. Relation of the input and output trans- pass filter characteristics. The fact that
sampled-data-control systemean be oh- Cms. feedback is present does not reduce attamped by plotting the locus of 3.pComo sitiof the frequnc otion. o r Pponets fth ouputintoa tme fncton. tary siguals. As a matter of fact, this pro-
K Even if the system is unstable, as portion is always the same for the outputXc shown by system function poles in the of an impulse modulator no matter where
1+ Z Kt3(s±Jn0) right half-plane, the output of the system it is located. If any nonlinearity exists inis still described by its Laplace transform. the output member, such as would result
for s =jco). This plot is very simple to The inverse transformation (step 3) is from motor saturation, it is possible tomake in all praetical cases. Since KJ3 has still unique with the abscissa of absolu-te- have mixing of the pure and complemen-low-pass filter characteristics 2Kf3 has convergence of the resulting output func- tary siguals in the nonlinear elements.Only two or three terms of large enough tion moved to the right of all the poles. This mixing is most troublesome when thesize to be important. Figure 11 shows It is well to note that the conventional input sigual spectrum extends to fre-
1951, VOLUME 70 Linvill-Sampled-Data Control Systems 1785

quencies near Q/2. The difference-fre- monitoring. First the correcting signal, cannot reduce the corruption of the out-quency signals arising from the inter- which is the output of the impulse modu- put due to a high-frequency disturbance,modulation could be very troublesome be- lator, will contain pure and complemen- it is necessary to make K2 by itself a goodcause they are of low frequencies and the tary components with equal complex am- low-pass filter because it is the only ob-natural low-pass filter characteristics of plitudes (PA. The pure component is able stacle standing between the actual dis-the output member would favor these to counteract the disturbance if it sub- turbing signal and the output.purely noise signals over the higher fre- tracts from 4d, but the complementaryquency pure signals. The only cure for components are merely ripple and have Summary of Analysis andthis trouble is to remove saturation ef- no beneficial effect on the system output. Consequent Design Objectivesfects from the nonlinear elements or if The second consequence of sampling isthis is impossible to filter out comple- that the size of the pure correcting signal Treating the process of sampling asmentary signals from the impulse modu- depends on the sizes of both pure and impulse modulation allows one to analyzelator before they reach the nonlinear complementary fed-back signals. Thus a sampled-error-data system by conven-element. the amplitude of the pure component of tional methods. The analysis is direct
the correcting signal at the output of the and the effects of changes in design ap-EFFECTIVENESS OF OUTPUT MONITORING impulse modulator can be found by pear as changes in K or ,B. In turn it isBY SAMPLED ERROR very easy to evaluate the effect of changes
The essential objective in the use of bA=-IdK2(s2)3(S2)- z X in K or 0 on the system performance.feedback in any control system is to n=- Having developed an analysis proceduremonitor a high-power low-accuracy out- Ki(s2+jnQ)K2(s2+jnQ)8(s2+jnQ) (17) one can now turn to a study of designput element with a sensitive measuring de- objectives.vice in a feedback loop. If a disturbance Call the amplitude of the pure loop signal In any of the common control systemscauses an output not called for at the in- '1dl. Then, the objective in design is to obtain a sys-put, an error signal goes down the feed- 45d1= 'Id±+'IAK1(S2) (18) tem which will cause the output quantityforward path to improve the situation. described by the variable 60(t) to assumeThe effects of inaccuracies in the output Combining equations 17 and 18 yields values as close as possible to those dic-member can be represented by disturb- tated by the input quantity, Es(t). At theance signals applied at the input of the 4)dl 4'dX outset it should be made clear that thereoutput members. Figure 13 shows suchl a l- KK(s2)K2(s2)0(s2) 1 exists no single, universal criterion ofrepresentation. Assume for simplicity 1+ "(S2+jnQ)K2(S2+ goodness" of a control system. Belowthat the input is zero and that the dis- nL-K JnQ)I(s2+jn.)J are three basic design conditions whichturbance is a single exponential of complex (19) are among the most important in sampled-amplitude bd and frequency s2. The data-control system design. No claim isloop signal resulting from the disturbance The nearness of made that they are the criteria, but theycan be called Idl. It is smaller than it are at least worthy of consideration in awould be without feedback if the fed- K1K2f majority of practical cases,back signal subtracts from Dd. 1+zKlK2F 1. The feedback monitoring must be effec-
(dl = d-Kl(S2)K2(S2)0(S2)+dl (16) in equation 19 to a value of one is a meas- tive; therefore, the value of Kl/l1+ 7Kf3 shallure f ho wel thesamped-eror-ata
be kept close to unity for as much of theure of how well the sampled-error-data fundamental frequency range (from -Q/2
1 feedback system suppresses a disturbing toQ/2) as possible.1+Ki(s2)K2(s2)3(s2) signal of frequency s2. 2. The system response must be satisfac-
/ Kl(s2)K2(s2)8(s2) ) The correcting signal contains both tory; therefore the value of K/1+2K3 shall4 i+K1(s2)K2(s2)0(s2) pure and complementary signals. There have, insofar as possible, an acceptable
are two aspects of this fact which deserve amplitude and phase characteristic up toThe size of ?dl will be much smaller than particular attention. First, if the dis- the frequency f/2.-J.d only if turbing signal frequency is less than Q/2, 3. Output ripple, produced by sampling,
t must be suppressed; therefore the transferKKi nthefrequency of the complementary com- function K(s) of the feed-forward element- 1K23 ponents of the correcting signal all lie should cut off as sharply as practicable at1 +KiK2i3 above Q/2 and can be filtered out by the a/2.
is much smaller than unity. This will be feed-forward section, KiK2. Second, if Having reduced the analysis of sampled-true so long as the frequency of the disturbing signal is data-systems to one similar to the analysis
greater than Q/2, the frequency of some of conventional servomechanisms andK1K23 complementary component of the cor- having laid out design objectives, one can
1+KlK20 recting signal lies below S2/2 and it causes now design sampled-data control systemsa high-amplitude low-frequency output by conventional techniques.
is nearly unity. disturbance at the output which is moreThe use of feedback in asampled-error- objectionable than the disturbance that References
data system has the same objective as the initiates it. The feedback in this caseueof feedback in a continuous-data makes matters worse than they would be 1. FUNDAMENTMAL THORO1 SEVaNostrEdCHAomS
system except for the fact that the moni- without it. In short, the section between pany, New York, N. Y., Chapter X, 1945.toring is done on a "periodic check-up" any high-frequency-disturbance inputs 2. THEORY OF SERVOMECEANISMS (book), James,basis rather than continuously. Figure ad the input to the impulse modulator NewcYork, N. V.,p Mchatra v,l1947. mpny14 shows a possible representation of a must contain very good low-pass filters. 3. ANALYSIS AND DESIGN OF SAMPLED DATA CON-disturbance in a sampled-error-data sys- In the above example Kz8 must be a low- TROL SYSTEMS (thesis), W. Kr. Linvill. Project
Whirlwind Report R-170, Massachusetts Institutetem. Sampling introduces two effects on pass filter. Furthermore, since feedback of Technology (Cambridge, Mass.), 1949.
1786 Linvill-Sampled-Data Control Systems ALEE TRANSACTIONS

Discussion by Poisson and is known as the Poisson William K. Linvill: As indicated by thesummation rule. discussors, all common results of the z-The point which is being made here is transform approach and the approach of
John R. Ragazzini and L. A. Zadeh (Colum- that the infinite summations used by the this paper agree. The essential differencebia University, New York, N. Y.): There author may be expressed in closed and gen- between the z-transform approach and theare several interesting results in this paper erally simple form by using the z-transform approach of this paper is that the z-trans-which correlate with some of the work done formulation. As a matter of fact, the form approach describes all signals in theby the discussors in connection with the Nyquist plot of the function system by sequences of samples whereasso-called z-transform method of analysis this paper describes all signals by continu-and synthesis of sampled-data control c ous time functions and their transforms.systems. >3 K,3(s±JnQ) With the z-transform approach, a continu-
The z-transform of a function f(t) is - ous signal is described only by its value atessentially the Laplace transform of the which is used by the author for the investi- the sampling instants and no data on the
trainc ofunit impulesewith rperiod nt)sx gation of stability, can be constructed signal is given at other values of time.a trai of unt impuseswth perod T) x- witout ay recorse tWithrothetiapproach thofpp thiso paper,paar,continu-u
pressed in terms of an auxiliary variable withoutnaanysrecourseedtonapproximationobyz e-e instead of s. The z-transform ap- aslotravrsethe unsoiate citrclefointheplan fashion and a sampled signal is described asproach is closely related to the so-called Thsztapproac hereuitscr inatonierzpable the limiting case of a continuous signal. A"generating function" method of solution of Thi aprahrslsi osdrbe look at the characteristics of the impulsedifference equations which dates back to saving in time and effort.mouarilstte thspn.TeLaplace.' Other closely related methods metod, the itndputountput relratinsgiven modulation of a string of impulses by theare those due to Jordan,' Samuelson, bytodtheauho'seutopureation15iayvenre signal to be sampled may be viewed as theTuttle,4 and Stone.5 Thethez-transformon15 my b re
Tuttl,'ad Stne.5 he ztranform garded as stemming from the expression limiting case of the modulation of a stringmethod as such and, in particular, its appli- fo th -rnfr fteerrof smooth pulses by the signal as the pulsescation to servomechanisms and pulsed orte-rasrmftherr become sharper and sharper. The modu-filters is treated in two standard tests on Oi *(z) lator output corresponding to a carrier ofservomechanisms6 7 and, in somewhat e-*(z)= (6) smooth pulses is a continuous time func-greater detail, in a paper by Raymond.'8
K *ztion. As the pulses become sharper and
Various extensions of the z-transform ap- Thus, multiplying this expression by the sharper the modulator output approachesproach and its reduction to engineering forward gain function K(s) one obtains an instantaneously sampled signal. Thepractice now are under way and will be 0zKs)Fourier transform of the continuous outputpresented in forthcoming papers. O*(z)(s)= = sT (7) signal is aperiodic. As the carrier pulsesThe connecting link between Dr. Linvill's O()-1 ±K1*(z)' Z='become sharper, the transform of the modu-
and z-transform methods is placed in evi- lator output becomes more nearly periodicdence by expressing the Laplace transform which is equivalent to the author's result, until finally the transform of the sampledof a sampled function f(t)8T(t in two differ- equation 15. signal is periodic and consequently is aent ways. In the past, the applications of z-trans- rational function of E'ST (or z). Thus the
Thus, employing complex convolution, form technique in the field of servomech- signals in a control system whether sampledone can write anisms have centered chiefly around the or not can be handled by the conventional
investigation of stability of sampled-data frequency approach. The control system~Cjrtft) } L A()Fsc-)d control systems. However, work now in components whether continuous-type orWt( 27rjJ 'A(x. F
(1)d progress indicates that the z-transform sampled-type can all be handled by transfer_j. (1) ~~method also can be used advantageously for functions. The components which receivewhere AT(S) and F(s) are the Laplace the design of such systems by shaping the and transmit sampled data are describedtransforms of 8T(t) and f(t) respectively, loop transmission function Kf3*(z) in much naturally by transfer functions which areSubstituting the expression for AT(S). the same manner as in the case of con- periodic in the frequency domain (rational
tinuous control systems. functions of e-ST); those components de-
1TS ()In conclusion, it is believed that the livering continuous output signals are de-
lT51 -e-T8 () z-transform method has much promise as scribed by conventional transfer functionsa tool in the analysis and design of sampled- which are aperiodic (rational functions of
in equation 1 and performing the contour data control systems, although the fre- s).integration yields: quency analysis technique developed by The fact that all parts of the system are
I,., Dr. Linvill is frequently more practicable described in conventional terms makes the6T(Oft)
I 'J c
F(s -x) and has the unquestioned advantage of handling of mixed systems very convenient.27rj _j. 1 -e- being more easily applied by the engineer The root of the difficulty in handling
co 27r ~~~~familiar with the conventional techniques sampled-error-data servomechanisms is that
- E F(s ±jnW72, U - (3) of handling continuous control systems. the whole closed loop behaves like a sampledn co ~ ~~T data device, although it is made up of con-
REFERENCES tinuous-data components. This fact is illus-Alternatively, interchanging the functions 1. Du CALCUJL DEs FoNCTIoNs GENERATRICCES, tinted by Figure 10 of the paper. Using3T(t) and f(t) yields: PART I oP THEORIIE ANALYTIQUE DIES PROBABILI- the frequency domain approach one can
1c+jco F(x)dxTIES (book). P. S. Lapiace. Paris, France, 1812. handle this type of system as a conventional
~~ { t37~t)f(t) } ~F(x)dx 2. CALCULUS 0o' FiNITE DIFFERENCES (book), system except that he must account for the2ijj.J11OD Ts C. Jordan. Chelsea Publishing Company, New complementary signals which cause Ko3(s)
sT T~~ York, N. Y., 1946. to be replaced by=F*(eST )=F*(z), z =esT (4) 3. FOUNDATIONS oiF ECONomic ANALYSIS (book)'
P. A. Samuelson. Harvard University Press, co

performing the infinite summation on each given and he wished to investigate quickly an excellent vehicle for the cut-and-tryterm of the partial fraction expansion. The the effect on the system performance of process which is often useful in systeminfinite summation on each term always introducing a lead network into the system. design.exists in closed form and agrees with the This investigation would be hard by the Summarizing: all common results be-Kf3*(z) mentioned by the discussors. z-transform approach and easy by the pro- tween the z-transform approach and theThough the K13*(z) described by the dis- cedure of this paper. One could not obtain approach of this paper agree. The differ-cussors above equation 6 of their discussion the new Kf*(z) directly from the old one; ence between the two is that one describesexists in closed form it is unnecessary to go however, the new Ki3(s) is found easily all signals by sequences of samples, whileto the z-transform formulation to obtain from the old one by merely multiplying the the other describes all signals as if they wereclosed form for the summation. While the old K,B(s) by the transfer function of the continuous; the approach of this paperfinal form of K,3*(z) is simple enough, the lead network. A very good approximation seems particularly advantageous on mixedprocess for obtaining it from the character- of the new ZKO can be easily obtained from systems, for example, the exact characteri-istics of the servo loop components by the the new K,3(s) by the graphical procedure zation of a sampled-error-data system isz-transform approach is tortuous. Suppose of Figure 11. While the graphical summa- possible by both methods but a convenientone were given a servo system with the tion is approximate, it is a very good ap- approximate characterization also can becharacteristics of all the loop components proximation and is very easy to get. It is made from the approach of this paper.
1788 Linvill-Sampled-Data Control Systems AIEE TRANSACTIONS