Embed Size (px)
Citation preview
Safety Consideration
Software limits on robot controller Limit switches on the robot “wrist” to prevent excess
rotations Limit switches on the vertical travel Contact detection on upper arm of robot Enable button on hand pendant E-Stop button on hand controller Couch can lower for patient egress during power
outage

Case Study 2
Automated Motion Correction –
Tracking the Spine
Challenges of Spinal Treatments
The spine moves during treatment
Vertebrae can move independent of one
another
Rigid transformation is not valid in most
cases
Adjacent structures (spinal cord) necessitate
high precision and accuracy

Traditional Radiation Therapy
Difficult to adequately immobilize the patient, internal structures, & the target
Image guidance (IGRT) confirms treatment setup but no compensation for target movement during the treatment
Implanted markers can increase accuracy but introduce additional challenges Invasive Delays time-to-treatment

Non-invasively registers non-rigid and bony anatomy
landmarks
Internal markers or frames not required
Automatically tracks spine from DRR image pairs
Cervical, thoracic, lumbar and sacral
Sub-millimeter targeting accuracy, (0.52 +/- 0.22 mm)† ‡
† As measured in end-to-end testing. Reference: Muacevic, A., Staehler, M., Drexler, C., Wowra, B., Reiser, M. and Tonn, J. Technical description, phantom accuracy and clinical feasibility for fiducial-free frameless real-time image-guided spinal radiosurgery. J Neurosurgery Spine.‡ Xsight accuracy specification of .95 mm.
Spine Tracking
Step 3Step 2Step 1
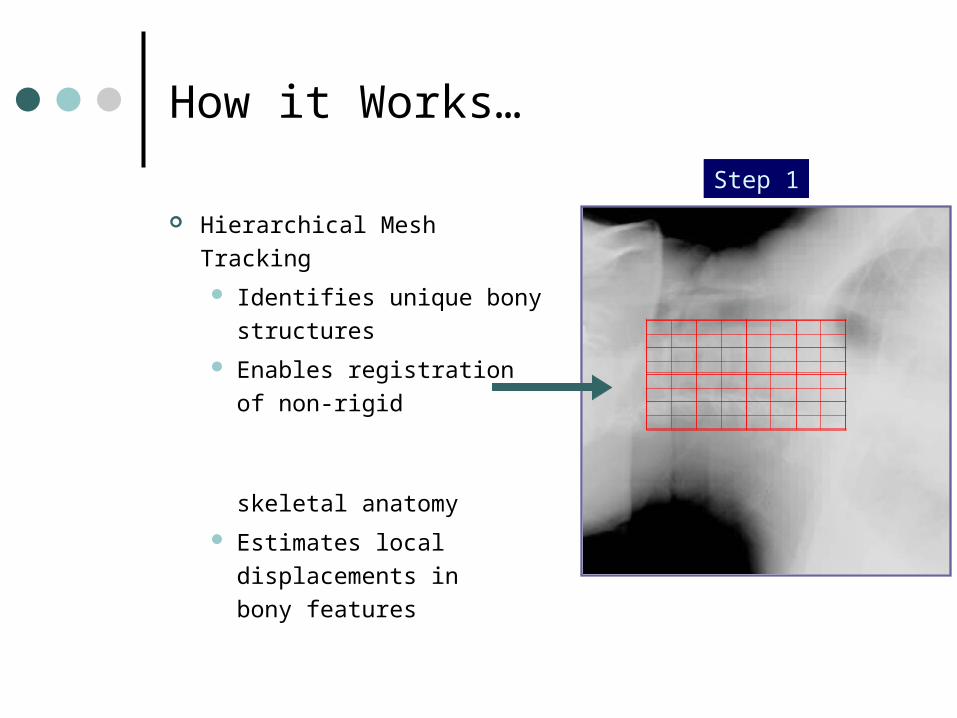
How it Works…
Hierarchical Mesh Tracking
Identifies unique bony
structures
Enables registration of
non-rigid
skeletal
anatomy
Estimates local
displacements in
bony features
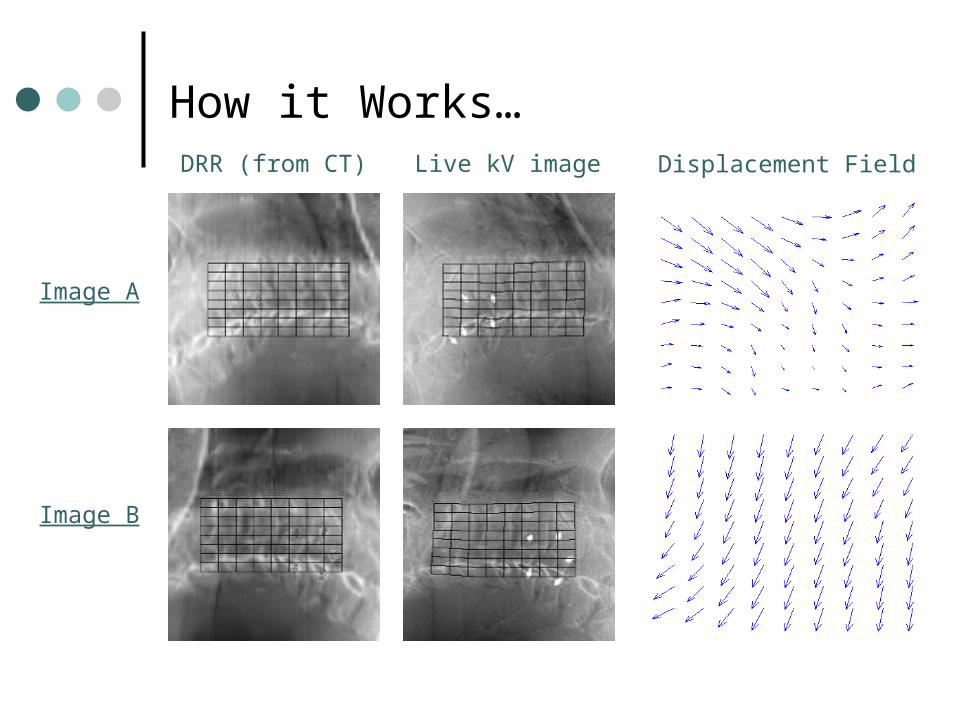
Live kV image
Image B
Image A
DRR (from CT) Displacement Field
How it Works…

Spine Tracking Animation

Case Study 3
Automated Motion Compensation –
Tracking Respriation
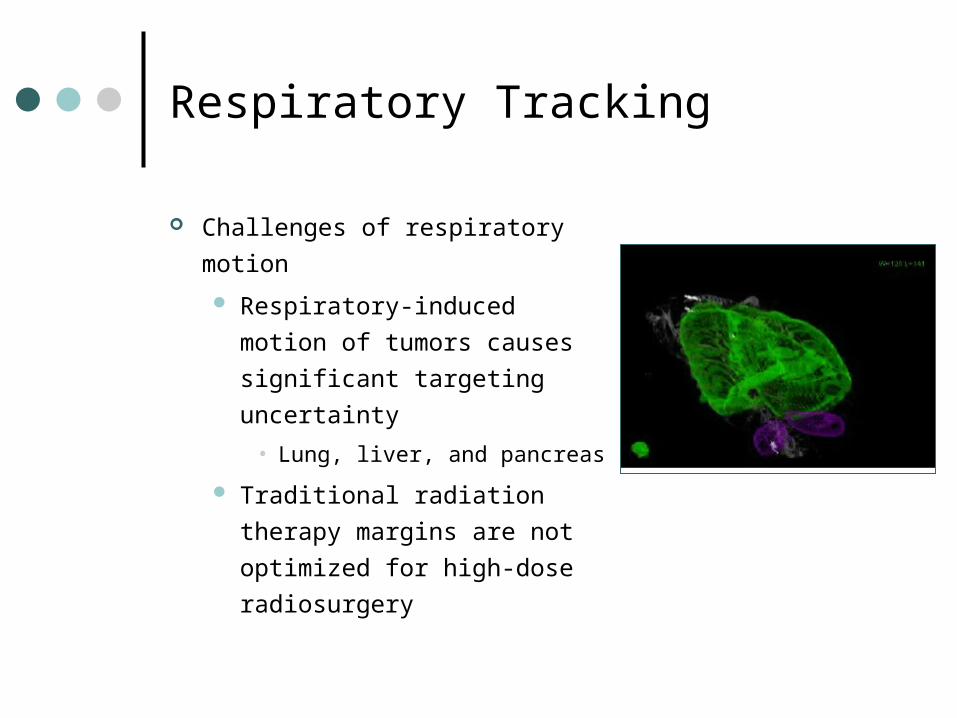
Respiratory Tracking
Challenges of respiratory motion
Respiratory-induced motion of
tumors causes significant
targeting uncertainty
• Lung, liver, and pancreas
Traditional radiation therapy
margins are not optimized for
high-dose radiosurgery
Traditional Radiation Therapy
Solutions for compensating for motion plagued with repeatability and compliance issues
Healthy tissues is unnecessarily treated
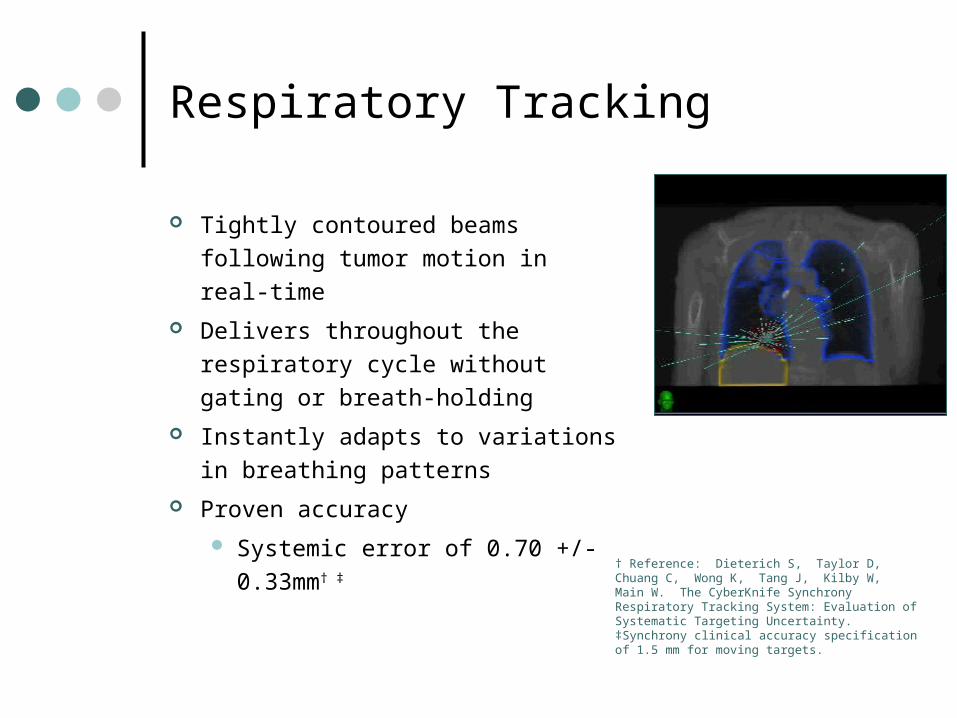
† Reference: Dieterich S, Taylor D, Chuang C, Wong K, Tang J, Kilby W, Main W. The CyberKnife Synchrony Respiratory Tracking System: Evaluation of Systematic Targeting Uncertainty. ‡Synchrony clinical accuracy specification of 1.5 mm for moving targets.
Respiratory Tracking
Tightly contoured beams following
tumor motion in real-time
Delivers throughout the respiratory
cycle without gating or breath-
holding
Instantly adapts to variations in
breathing patterns
Proven accuracy
Systemic error of 0.70 +/-
0.33mm† ‡

How It Works… (1)
Two features to form the basis for accuracy
Gold markers, implanted prior to treatment
LED markers on a special patient vest

How It Works… (2)
Prior to treatment start: creation of dynamic correlation model
Imaging system takes positions of markers at discrete points of time
LED’s are monitored in real time by a camera system

How It Works… (2)
Prior to treatment start: creation of dynamic correlation model
Markers are monitored in real time by a camera system
Imaging system takes positions of fiducials at discrete points of time
time
dis
pla
cem
en
t
dis
pla
cem
en
t
time

How It Works… (3)
This process repeats throughout the treatment, updating and correcting beam delivery based upon the patient’s current breathing pattern
time
dis
pla
cem
en
t
dis
pla
cem
en
t
time

Synchrony Animation

Summary
There is a place for autonomous robotics in medicine
Special consideration must me taken to adapt to dynamic environment
Safety is most important requiring redundancy throughout
Greater demand for precision and accuracy will pave the way for future applications