Embed Size (px)
Citation preview

Advanced Series on
Statistical Science & I
Applied Probability ^ ^ ^ A £ J
Ruin Probabilities
Seren Asmussen
World Scientific

Ruin Probabilities

ADVANCED SERIES ON STATISTICAL SCIENCE &APPLIED PROBABILITY
Editor: Ole E. Barndorff-Nielsen
Published
Vol. 1: Random Walks of Infinitely Many Particlesby P. Revesz
Vol. 2: Ruin Probabilitiesby S. Asmussen
Vol. 3: Essentials of Stochastic Finance : Facts, Models, Theoryby Albert N. Shiryaev
Vol. 4: Principles of Statistical Inference from a Neo-Fisherian Perspectiveby L. Pace and A. Salvan
Vol. 5: Local Stereologyby Eva B. Vedel Jensen
Vol. 6: Elementary Stochastic Calculus - With Finance in Viewby T. Mikosch
Vol. 7: Stochastic Methods in Hydrology: Rain, Landforms and Floodseds. O. E. Barndorff-Nielsen et al.
Vol. 8: Statistical Experiments and Decisions : Asymptotic Theoryby A. N. Shiryaev and V. G. Spokoiny

Ruin Probabilities
Soren AsmussenMathematical Statistics
Centre for Mathematical Sciences
Lund University
Sweden
World ScientificSingapore • NewJersey • London • Hong Kong

Published by
World Scientific Publishing Co. Pte. Ltd.
P O Box 128, Fatter Road , Singapore 912805
USA office: Suite 1B, 1060 Main Street, River Edge, NJ 07661
UK office: 57 Shelton Street, Covent Garden, London WC2H 9HE
Library of Congress Cataloging-in-Publication Data
Asmussen, SorenRuin probabilities / Soren Asmussen.
p. cm. -- (Advanced series on statistical science and applied probability ; vol. 2)Includes bibliographical references and index.ISBN 9810222939 (alk. paper)1. Insurance--Mathematics. 2. Risk. I. Tide. II. Advanced series on statistical science
& applied probability ; vol. 2.
HG8781 .A83 2000368'.01--dc2l 00-038176
British Library Cataloguing -in-Publication DataA catalogue record for this book is available from the British Library.
First published 2000Reprinted 2001
Copyright ® 2000 by World Scientific Publishing Co. Pte. Ltd.
All rights reserved. This book, or parts thereof, may not be reproduced in any form or by any means,electronic or mechanical, including photocopying, recording or any information storage and retrievalsystem now known or to be invented, without written permission from the Publisher.
For photocopying of material in this volume , please pay a copying fee through the Copyright
Clearance Center, Inc., 222 Rosewood Drive, Danvers, MA 01923, USA. In this case permission to
photocopy is not required from the publisher.
Printed by Fulsland Offset Printing (S) Pte Ltd, Singapore

Contents
Preface ix
I Introduction 1
1 The risk process . . . . . . . . . . . . . .. . . . .. .. . . . . 1
2 Claim size distributions .. . . . . . . . .. . . . . . . . . . . . 5
3 The arrival process . . . . . . . . . . . . . . . . . . . . . . . . 114 A summary of main results and methods . . . . .. . . . . . . 13
5 Conventions . .. . .. .. . . . . . . . . . . . . . . . . . . . . 19
II Some general tools and results 23
1 Martingales . .. . .. .. . . . . . .. . . . . . . . . . . . . . 242 Likelihood ratios and change of measure . . .. . . . . . .. . 26
3 Duality with other applied probability models . . .. . . . . . 304 Random walks in discrete or continuous time . . . . . . . . . . 335 Markov additive processes . . . . . . . .. . . . . . . . . . . . 39
6 The ladder height distribution . . . .. . .. .. . . . . . . . . 47
III The compound Poisson model 57
1 Introduction . . . . . . . . .. .. .. . .. .. . . . . . . 58
2 The Pollaczeck-Khinchine formula . . . . . . . . . . . . . . . 613 Special cases of the Pollaczeck-Khinchine formula . . . . . . . 624 Change of measure via exponential families . . . .... . .. . 67
5 Lundberg conjugation . .. . . . . . . . . . . . . . . . . . . . . 69
6 Further topics related to the adjustment coefficient .. . . . . 757 Various approximations for the ruin probability . . . . . . . . 79
8 Comparing the risks of different claim size distributions . . . . 83
9 Sensitivity estimates . . . . . . . . . . . . . . . . . . . . . . . 8610 Estimation of the adjustment coefficient . . . . . . . . . . . . 93
v

vi CONTENTS
IV The probability of ruin within finite time 97
1 Exponential claims . . . . . . . . . . . . . . . . . . . . . . . . 98
2 The ruin probability with no initial reserve . . . . . . . . . . . 103
3 Laplace transforms . . . . . . . . . . . . . . . . . . . . . . . . 108
4 When does ruin occur? . . . . . . . . . . . . . . . . . . . . . . 110
5 Diffusion approximations . . . . . . . . . . . . .. . . .. . . . 117
6 Corrected diffusion approximations . . . . . . . . . . .. . . . 121
7 How does ruin occur? . . .. . . . . . . . . . . . . . . . . . . . 127
V Renewal arrivals 1311 Introduction .. . . . . . . . . . . . . . . . . . . . . . . . . . . 131
2 Exponential claims. The compound Poisson model with neg-ative claims . . . . . . . . . . . . . . . . . . . . . . . . . . . . 134
3 Change of measure via exponential families . . . . . . . . . . . 137
4 The duality with queueing theory .. .. .. . . . .. . . . . . 141
VI Risk theory in a Markovian environment 145
1 Model and examples . . . . . . . . . . . .. . .. . . . . . . . 145
2 The ladder height distribution . . . . . . . . . .. . . . . . . . 152
3 Change of measure via exponential families ........... 160
4 Comparisons with the compound Poisson model ........ 168
5 The Markovian arrival process . . . . . . .. .. . . ... . . . 173
6 Risk theory in a periodic environment .. . . . .. . . . . . . . 176
7 Dual queueing models .... ... ................ 185
VII Premiums depending on the current reserve 1891 Introduction . . . . . . . . . . . . . . . . . . . .. . . . . . . . 189
2 The model with interest . . . . . .. . . . . . . . . . .. . . . 196
3 The local adjustment coefficient. Logarithmic asymptotics . . 201
VIII Matrix-analytic methods 2151 Definition and basic properties of phase-type distributions .. 215
2 Renewal theory . . . . . . . . . . . . . . . . . . . . . . . . . . 223
3 The compound Poisson model . . . . . . . . . .. . . . . . . . 227
4 The renewal model . . . . . . . . . . . . . . . .. . . . . . . . 229
5 Markov-modulated input . . .. . . . . . . . . . . . . . . . . . 234
6 Matrix-exponential distributions . . . . . . . . . . . .. . . . 240
7 Reserve-dependent premiums . . . . .. . . . .. . . . . . . . 244

CONTENTS vii
IX Ruin probabilities in the presence of heavy tails 2511 Subexponential distributions . . . . . . . . . . . . . . . . . . . 2512 The compound Poisson model . .. . . . . . . . . . . . . . . . 2593 The renewal model . . . . . . . . . . . . . . . . . . . . . . . . 2614 Models with dependent input . . . . . . . . . . . . . . . . . . 2645 Finite-horizon ruin probabilities . . . . .. . . . . . . . . . . . 2716 Reserve-dependent premiums . . . . . . . . . . . . . . . . . . 279
X Simulation methodology 2811 Generalities . .. . . . . . . . . . . .. . . . . . . . .. . .. . 2812 Simulation via the Pollaczeck-Khinchine formula . . . . . . . 2853 Importance sampling via Lundberg conjugation . . . . . . . . 2874 Importance sampling for the finite horizon case . . . . . .. . 2905 Regenerative simulation . .. . . . . . . . . . . . . . . . . . . 2926 Sensitivity analysis . . . . .. . .. . . . . . . . . . . . . . . . 294
XI Miscellaneous topics 2971 The ruin problem for Bernoulli random walk and Brownian
motion. The two-barrier ruin problem . . . . . . . . . . . . . 2972 Further applications of martingales . . . . . . . . . . . . . . . 3043 Large deviations . . . . . ... . .. . . . . . . . . . . . . .. . 3064 The distribution of the aggregate claims . . . . . . . . . .. . 3165 Principles for premium calculation . . . .. . . . . . . . . . . . 3236 Reinsurance . . . . . . . . . . . .. . . . . . . . . . . . . . . . 326
Appendix 331Al Renewal theory . . . . .. .. . . . . . . . . . . . . .. . . . . 331A2 Wiener-Hopf factorization .. . . . . . . . . . . . . . . . . . . 336A3 Matrix-exponentials . . . . . . . . .. . . . . . . . .. . . . . 340A4 Some linear algebra . . . . . . . . . . . . . . . . . . . . . . . . 344AS Complements on phase-type distributions . . . . . . . . . .. . 350
Bibliography 363
Index 383

This page is intentionally left blank

Preface
The most important to say about the history of this book is: it took too longtime to write it! In 1991, I was invited to give a course on ruin probabilities atthe Laboratory of Insurance Mathematics, University of Copenhagen. Since Iwas to produce some hand-outs for the students anyway, the idea was close toexpand these to a short book on the subject, and my belief was that this couldbe done rather quickly.
The course was never realized, but the hand-outs were written and thebook was started (even a contract was signed with a deadline I do not dare towrite here!). But the pace was much slower than expected, and other projectsabsorbed my interest. As an excuse: many of these projects were related tothe book, and the result is now that the book is much more related to my ownresearch than the initial outline.
Let me take this opportunity to thank above all my publisher World ScientificPublishing Co. and the series editor Ole Barndorff-Nielsen for their patience.A similar thank goes to all colleagues who encouraged me to finish the projectand continued to refer to the book by Asmussen which was to appear in a yearwhich continued to be postponed.
Risk theory in general and ruin probablities in particular is traditionallyconsidered as part of insurance mathematics, and has been an active area ofresearch from the days of Lundberg all the way up to today. However, it wouldnot be fair not to say that the practical relevance of the area has been questionedrepeatedly. One reason for writing this book is a feeling that the area has inthe recent years achieved a considerable mathematical maturity, which has inparticular removed one of the standard criticisms of the area, that it can only saysomething about very simple models and questions. Apart from these remarks,I have deliberately stayed away from discussing the practical relevance of thetheory; if the formulations occasionally give a different impression, it is not byintention. Thus, the book is basically mathematical in its flavour.
It has obviously not been possible to cover all subareas. In particular, thisapplies to long-range dependence which is intensely studied in the neighboring
ix

x PREFACE
field of queueing theory. The main motivation comes from statistical data fornetwork traffic (e.g. Willinger et al. [381]); for the effects on tail probabilities,see e .g. Resnick & Samorodnitsky [303] and references therein. Concerning ruinprobabilities, see in particular Michna [259]. Another interesting area which isnot covered is dynamic control. In the classical setting of Cramer-Lundbergmodels, some basic discussion can be found in the books by Biihlmann [82] andGerber [157]; see also Schmidli [325] and the references in Asmussen & Taksar[52]. More recently, the standard stochastic control setting of diffusion modelshas been considered, e.g. Hojgaard & Taksar [206], Asmussen, Hojgaard & Tak-sar [35] and Paulsen & Gjessing [284]. The book does not go into the broaderaspects of the interface between insurance mathematics and mathematical fi-nance, an area which is becoming increasingly important. Finally, I regret thatdue to time constraints, it has not been possible to incorporate more numericalexamples than the few there are.
A book like this can be organized in many ways. One is by model, anotherby method. The present book is in between these two possibilities. ChaptersIII-VII introduce some of the main models and give a first derivation of some oftheir properties. Chapters IX-X then go in more depth with some of the specialapproaches for analyzing specific models and add a number of results on themodels in Chapters III-VII (also Chapter II is essentially methodological in itsflavor).
Here is a suggestion on how to get started with the book. For a brief ori-entation, read Chapter I, the first part of 11.6 (to understand the Pollaczeck-Khinchine formula in 111.2 more properly), 111.1-5, IV.4a, VII.1, VIII.1-3 andIX.1-3. For a second reading, incorporate 11.1-4, 111.8-9, IV.2, IV.5, VI.1-3,VII.2, IX.4-5, X.1-3 and XI.3. The rest is up to your specific interests. Goodluck!
I have tried to be fairly exhaustive in citing references close to the text,In addition, some papers not cited in the text but judged to be of interestare included in the Bibliography. It is obvious that such a system involves anumber of inconsistencies and omissions, for which I apologize to the reader andthe authors of the many papers who ought to have been on the list.
I intend to keep a list of misprints and remarks posted on my web page,
http://www.maths .lth.se/matstat /staff/asmus
and I am therefore grateful to get relevant material sent by email to
asmusfmaths .lth.se
Lund February 2000Soren Asmussen

PREFACE xi
The second printing differs from the first only by minor corrections, manyof which were pointed out by Hanspeter Schmidli . More substantial remarks,of which there are not many at this stage , as well as some additional referencescontinue to be at the web page.
Lund September 2001Soren Asmussen
Acknowledgements
Many of the figures , not least the more complicated ones, were produced byLone Juul Hansen , Aarhus , supported by Center for Mathematical Physics andStochastics (MaPhySto). A number of other figures were supplied by ChristianGeisler Asmussen , Fig. 111 .5.2 by Rafal Kulik , Fig. IV .6.1 by Bjarne Hojgaardand the table in Example 111.8 .6 by my 1999 simulation class in Lund.
Section VII .3 is reprinted from Asmussen & Nielsen [39] and parts of IX.4from Asmussen , Schmidli & Schmidt [47] with the permission from AppliedProbability Trust . Section VIII . 1 is almost identical to Section 2 of Asmussen[26] and reprinted with permission of Blackwell Publishers. Parts of II.6 isreprinted from Asmussen & Schmidt [49] and parts of IX.5 from Asmussen &Kliippelberg [36] with the permission from Elsevier Science . Parts of X.1 andX.3 are reprinted from Asmussen & Rubinstein [46] and parts of VIII.5 fromAsmussen [21] with permission from CRC Press.

This page is intentionally left blank

Chapter I
Introduction
1 The risk process
In this chapter , we introduce some general notation and terminology, and givea very brief summary of some of the models, results and topics to be studied inthe rest of the book.
A risk reserve process {Rt}t>o, as defined in broad terms , is a model for thetime evolution of the reserves of an insurance company. We denote throughoutthe initial reserve by u = Ro. The probability O(u) of ultimate ruin is theprobability that the reserve ever drops below zero,
t/i(u) = P (infRt < 0) = P (infR t < 0t>0 t>0
The probability of ruin before time T is
Ro=ul. (1.1)
t,i(u,T) = P inf Rt < 0 I . (1.2)(O<t<T
We also refer to t/) (u) and 0(u, T) as ruin probabilities with infinite horizon andfinite horizon , respectively. They are the main topics of study of the presentbook.
For mathematical purposes, it is frequently more convenient to work withthe claim surplus process {St}t>0 defined by St = u - Rt. Letting
T(u) = inf {t > 0 : Rt < 0} = inf It > 0 : St > u}, (1.3)
M = sup St, MT = sup St, (1.4)O<t<oo O<t<T
1

2 CHAPTER I. INTRODUCTION
be the time to ruin and the maxima with infinite and finite horizon, respectively,the ruin probabilities can then alternatively be written as
,b(u) = P (r(u) < oo) = P(M > u), (1.5)
i,i(u,T) = F (MT > u) = P(r(u) < T). (1.6)
Sofar we have not imposed any assumptions on the risk reserve process.However, the following set-up will cover the vast majority of the book:
• There are only finitely many claims in finite time intervals. That is,
the number Nt of arrivals in [0, t] is finite. We denote the interarrival
times of claims by T2, T3, ... and T1 is the time of the first claim. Thus,
the time of arrival of the nth claim is an = T1 + • • • + Tn, and Nt =
min {n > 0 : 0rn+1 > t} = max {n > 0: Un < t}-
• The size of the nth claim is denoted by Un.
• Premiums flow in at rate p, say, per unit time.
Putting things together, we see that
Nt Nt
Rt = u + pt - E Uk, St = E Uk - pt. (1.7)
k=1 k=1
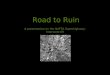
The sample paths of {Rt} and {St} and the connection between the two
processes are illustrated in Fig. 1.1.
Figure 1.1

1. THE RISKPROCESS 3
Note that it is a matter of taste (or mathematical convenience) whether oneallows {Rt} and/or {St} to continue its evolution after the time T(u) of ruin.Thus, for example, one could well replace Rt by Rtnr(u) or RtA,(,.) V 0. For thepurpose of studying ruin probabilities this distinction is, of course, immaterial.
Some main examples of models not incorporated in the above set-up are:
• Models with a premium depending on the reserve (i.e., on Fig. 1.1 theslope of {Rt} should depend also on the level). We study this case in Ch.VII.
• Brownian motion or more general diffusions. We shall discuss Brownianmotion somewhat in Chapter IV, but as an approximation to the riskprocess rather than as a model of intrinsic merit. However, since anymodeling involves some approximative assumptions, one may well arguethat Brownian motion in itself could be a reasonable model, and the basicruin probabilities are derived in XI.1.
• General Levy processes (defined as continuous time processes with sta-tionary independent increments) where the jump component has infiniteLevy measure, allowing a countable infinity of jumps on Fig. 1.1. We shallnot deal with this case either, though many results are straightforward togeneralize from the compound Poisson model; a basic references is Gerber[127].
The models we consider will typically have the property that there exists aconstant p such that
Nt a
E Uk p, t -* oo. (1.8)k=1
The interpretation of p is as the average amount of claim per unit time. Afurther basic quantity is the safety loading (or the security loading) n defined asthe relative amount by which the premium rate p exceeds p,
rl=P
p-P
It is sometimes stated in the theoretical literature that the typical values of thesafety loading 77 are relatively small, say 10% - 20%; we shall, however, notdiscuss whether this actually corresponds to practice. It would appear obvious,however , that the insurance company should try to ensure 77 > 0, and in fact:
Proposition 1.1 Assume that (1.8) holds. If 77 < 0, then M = oo a.s. andhence ,b(u) = 1 for all u. If 77 > 0, then M < oo a.s. and hence O(u) < 1 forall sufficiently large u.

4 CHAPTER I. INTRODUCTION
Proof It follows from (1.8) that_FN,
St __ k=1 Uk pt a4.t -^ oo.
t t p - p'
If 77 < 0, then this limit is > 0 which implies St a$ oo and hence M = oo a.s. If
rl > 0, then similarly limSt/t < 0, St -oo, M < oo a.s. q
In concrete models, we obtain typically a somewhat stronger conclusion,namely that M = oo a.s., tb(u) = 1 for all u holds also when rl = 0, and that
,b(u) < 1 for all u when rl > 0. However, this needs to be verified in each
separate case.The simplest concrete example (to be studied in Chapter III) is the com-
pound Poisson model, where {Nt} is a Poisson process with rate ,Q (say) and
U1, U2, ... are i.i.d. and independent of {Nt}. Here it is easy to see that p = ,6EU
(on the average, ,Q claims arrive per unit time and the mean of a single claim is
EU) and that alsoNt
lira EEUk = p. (1.10)t aoo t
k=1
Again, (1.10) is a property which we will typically encounter. However, not all
models considered in the literature have this feature:
Example 1.2 (Cox PROCESSES) Here {Nt} is a Poisson process with random
rate /3(t) (say) at time t. If U1, U2, ... are i.i.d. and independent of {(0(t), Nt)},
it is not too difficult to show that p as defined by (1.8) is given by
^tp = EU • lim itJ (3(s) ds
t-,oo t 0
(provided the limit exists). Thus p may well be random for such processes,namely, if {(3(t)} is non-ergodic. The simplest example is 3(t) = V where V
is a r.v. This case is referred to as the mixed Poisson process, with the most
notable special case being V having a Gamma distribution, corresponding to
the Pdlya process. 0
We shall only encounter a few instances of a Cox process, in connection with
risk processes in a Markovian or periodic environment (Chapter VI), and here
(1.8), (1.10) hold with p constant.
Proposition 1.3 Assume p 54 1 and define Rt = Rt1p. Then the connection
between the ruin probabilities for the given risk process {Rt} and those ^(u),
0(u,T) for {Rt} is given by
V)(u) = t/i (u), zP(u ,T) = i,i(u,Tp). (1.11)

2. CLAIM SIZE DISTRIBUTIONS 5
The proof is trivial. Since { Rt } has premium rate 1, the role of the result is
to justify to take p = 1, which is feasible since in most cases the process { Rt }
has a similar structure as {Rt} (for example, the claim arrivals are Poisson orrenewal at the same time). Note that when p = 1, the assumption > 0 isequivalent to p < 1; in a number of models, we shall be able to identify p withthe traffic intensity of an associated queue, and in fact p < 1 is the fundamentalassumption of queueing theory ensuring steady-state behaviour (existence of alimiting stationary distribution).
Notes and references The study of ruin probabilities, often referred to as collec-tive risk theory or just risk theory, was largely initiated in Sweden in the first half ofthe century. Some of the main general ideas were laid down by Lundberg [250], whilethe first mathematically substantial results were given in Lundberg [251] and Cramer[91]; another important early Swedish work is Tacklind [373]. The Swedish school
was pioneering not only in risk theory, but in probability and applied probability as awhole; in particular, many results and methods in random walk theory originate fromthere and the area was ahead of related ones like queueing theory.
Some early surveys are given in Cramer [91], Segerdahl [334] and Philipson [289].
Some main later textbooks are (in alphabetical order) Buhlmann [82], Daykin, Pen-tikainen & Pesonen [101], De Vylder [110], Gerber [157], Grandell [171], Rolski, Schmid-li, Schmidt & Teugels [307] and Seal [326], [330]. Besides in standard journals in proba-bility and applied probability, the research literature is often published in journals likeAstin Bulletin , Insurance: Mathematics and Economics, Mitteilungen der Verein derSchweizerischen Versicherungsmathematiker and the Scandinavian Actuarial Journal.
The term risk theory is often interpreted in a broader sense than as just to comprisethe study of ruin probabilities. An idea of the additional topics and problems one mayincorporate under risk theory can be obtained from the survey paper [273] by Norberg;see also Chapter XI. In the even more general area of non-life insurance mathematics,some main texts (typically incorporating some ruin theory but emphasizing the topic toa varying degree) are Bowers et al. [76], Buhlmann [82], Daykin et al. [101], Embrechtset al. [134], Heilmann [191], Hipp & Michel [198], Straub [353], Sundt [354], Taylor[364]. Note that life insurance (e.g. Gerber [159]) has a rather different flavour, andwe do not get near to the topic anywhere in this book.
Cox processes are treated extensively in Grandell [171]. For mixed Poisson pro-
cesses and Polya processes , see e .g. the recent survey by Grandell [173] and references
therein.
2 Claim size distributions
This section contains a brief survey of some of the most popular classes of dis-tributions B which have been used to model the claims U1, U2,.... We roughlyclassify these into two groups , light-tailed distributions (sometimes the term

6 CHAPTER I. INTRODUCTION
'Cramer-type conditions' is used), and heavy-tailed distributions. Here light-
tailed means that the tail B(x) = 1 - B(x) satisfies B(x) = O(e-8x) for some
s > 0. Equivalently, the m.g.f. B[s] is finite for some s > 0. In contrast, B is
heavy-tailed if b[s] = oo for all s > 0, but different more restrictive definitionsare often used: subexponential, regularly varying (see below) or even regularlyvarying with infinite variance. On the more heuristical side, one could mentionalso the folklore in actuarial practice to consider B heavy-tailed if '20% of theclaims account for more than 80% of the total claims', i.e. if
1 °O
Jx B(dx) > 0.8,
AB bos
where B(bo.2) = 0.2 and /LB is the mean of B.
2a Light-tailed distributions
Example 2.1 (THE EXPONENTIAL DISTRIBUTION) Here the density is
b(x) = be-ax (2.1)
The parameter 6 is referred to as the rate or the intensity, and can also be
interpreted as the (constant) failure rate b(x)/B(x).As in a number of other applied probability areas, the exponential distribu-
tion is by far the simplest to deal with in risk theory as well. In particular, forthe compound Poisson model with exponential claim sizes the ruin probability,O(u) can be found in closed form. The crucial feature is the lack of memory: if
X is exponential with rate 6, then the conditional distribution of X - x given
X > x is again exponential with rate b (this is essentially equivalent to the fail-ure rate being constant). For example in the compound Poisson model, a simplestopping time argument shows that this implies that the conditional distribution
of the overshoot ST(u) - u at the time of ruin given r(u) is again exponential
with rate 8, a fact which turns out to contain considerable information. q
Example 2 .2 (THE GAMMA DISTRIBUTION) The gamma distribution with pa-
rameters p, 6 has density
P
b(x)r(p)xP-le-ax
and m.g.f.P
B[s]= (8Is ) , s<8. (2.3)

2. CLAIM SIZE DISTRIBUTIONS 7
The mean EX is p/b and the variance Var X is p/b2. In particular, the squaredcoefficient of variation (s.c.v.)
VarX1
(EX )2 p
is < 1 for p > 1, > 1 for p < 1 and = 1 for p = 1 (the exponential case).The exact form of the tail B(x) is given by the incomplete Gamma function
r(x; p),
r(bx; p) °°B(x) = r(p) where r (x; p) = J tP-le-tdt.
Asymptotically, one has
JP-1B(x) r(p
) XP ie -ax
In the sense of the theory of infinitely divisible distributions, the Gammadensity (2.2) can be considered as the pth power of the exponential density(2.1) (or the 1/pth root if p < 1). In particular, if p is integer and X has the
gamma distribution p, 0, then X v Xl + • • • + X, where X1, X2.... are i.i.d. andexponential with rate d. This special case is referred to as the Erlang distributionwith p stages, or just the Erlang(p) distribution. An appealing feature is itssimple connection to the Poisson process: B(x) = P(Xi + • • • + XP > x) is theprobability of at most p - 1 Poisson events in [0, x] so that
ate (b2 ):B(x) = r` e-i=o•L
In the present text, we develop computationally tractable results mainly forthe Erlang case (p = 1, 2, ...). Ruin probabilities for the general case has beenstudied, among others, by Grandell & Segerdahl [175] and Thorin [369]. q
Example 2 .3 (THE HYPEREXPONENTIAL DISTRIBUTION) This is defined as a
finite mixture of exponential distributions,
Pb(x) = r` aibie-a;y
i=1
where >i ai = 1, 0 < ai < 1, i = 1, ... , p. An important property of thehyperexponential distribution is that its s.c.v. is > 1. q

8 CHAPTER I. INTRODUCTION
Example 2 .4 (PHASE-TYPE DISTRIBUTIONS) A phase-type distribution is the
distribution of the absorption time in a Markov process with finitely many states,
of which one is absorbing and the rest transient. Important special cases are the
exponential, the Erlang and the hyperexponential distributions. This class of
distributions plays a major role in this book as the one within computationally
tractable exact forms of the ruin probability z/)(u) can be obtained.
The parameters of a phase-type distribution is the set E of transient states,the restriction T of the intensity matrix of the Markov process to E and therow vector a = (ai)iEE of initial probabilities. The density and c.d.f. are
b(x) = aeTxt, resp. B(x) = aeTxe
where t = Te and e = (1 ... 1)' is the column vector with 1 at all entries.
The couple (a, T) or sometimes the triple (E, a, T) is called the representation.We give a more comprehensive treatment in VIII.1 and defer further details to
Chapter VIII. q
Example 2 .5 (DISTRIBUTIONS WITH RATIONAL TRANSFORMS) A distributionB has a rational m.g.f. (or, equivalently, a rational Laplace transform) if B[s] _
p(s)/q(s) with p(s) and q(s) being polynomials of finite degree. Equivalentcharacterizations are that the density b(x) has one of the forms
q
b(x) = cjxienbx, (2.7)
j=1
q1 q2 q3
b(x) = cjxieWWx + djxi cos(ajx)ea'x + > ejxi sin(bjx)e`ix ,(2.8)
j=1 j=1 j=1
where the parameters in (2.7) are possibly complex-valued but the parameters
in (2.8) are real-valued.This class of distributions is popular in older literature on both risk the-
ory and queues, but the current trend in applied probability is to restrict at-tention to the class of phase-type distributions, which is slightly smaller butmore amenable to probabilistic reasoning. We give some theory for matrix-exponential distribution in VIII.6. q
Example 2 .6 (DISTRIBUTIONS WITH BOUNDED SUPPORT) This example (i.e.
there exists a xo < oo such that B(x) = 0 for x > xo, B(x) > 0 for x < xo) is ofcourse a trivial instance of a light-tailed distribution. However, it is notable froma practical point of view because of reinsurance: if excess-of-loss reinsurancehas been arranged with retention level xo, then the claim size which is relevantfrom the point of view of the insurance company itself is U A xo rather than U
(the excess (U - xo)+ is covered by the reinsurer). See XI.6. q

2. CLAIM SIZE DISTRIBUTIONS 9
2b Heavy-tailed distributions
Example 2.7 (THE WEIBULL DISTRIBUTION) This distribution originates from
reliability theory. Here failure rates b(x) = b(x)/B(x) play an important role,
the exponential distribution representing the simplest example since here b(x) is
constant. However, in practice one may observe that b(x) is either decreasing or
increasing and may try to model smooth (incerasing or decreasing) deviations
from constancy by 6(x) = dx''-1 (0 < r < oo). Writing c = d/r, we obtain the
Weibull distribution
B(x) = e-Cx', b(x) = crx''-le-`xr, (2.9)
which is heavy-tailed when 0 < r < I. All moments are finite. q
Example 2 .8 (THE LOGNORMAL DISTRIBUTION) The lognormal distribution
with parameters a2, p is defined as the distribution of ev where V - N(p, a2),
or equivalently as the distribution of a°U+µ where U - N(0,1). It follows that
the density is
lb(x) = d
't (1ogX - pl = 1 W
l
(logx -,u
dx or J ax or
1 exp f-1 (lox_P)2} (2.10)
Asymptotically, the tail is
B (x) ex logx- p
alogx 2r p 1
-1 2 ( a )
21 (2.11)
The loinormal distribution has moments of all orders. In particular, the meanis eµ+a /2 and the second moment is e2µ+2o2. q
Example 2 .9 (THE PARETO DISTRIBUTION) Here the essence is that the tailB(x) decreases like a power of x. There are various variants of the definitionaround, one being
B(x) (1 + X)-b(x) (1 + x)a+1' x > 0. (2.12)
Sometimes also a location parameter a > 0 and a scale parameter A > 0 isallowed, and then
b(x) = 0, x < a, b(x) _ A(1 + (x aa)/A)-a+1'
x > a. (2.13)
The pth moment is finite if and only if p < a - 1. q

10 CHAPTER I. INTRODUCTION
Example 2.10 (THE LOGGAMMA DISTRIBUTION) The loggamma distributionwith parameters p, 6 is defined as the distribution of et' where V has the gammadensity (2.2). The density is
8p(log x)p-ib(x) - x6+lr(p) (2.14)
The pth moment is finite if p < 5 and infinite if p > 5. For p = 1, the loggammadistribution is a Pareto distribution. q
Example 2 .11 (PARETO MIXTURES OF EXPONENTIALS) This class was intro-duced by Abate, Choudhury & Whitt [1] as the class of distributions of r.v.'sof the form YX, where Y is Pareto distributed with a = (p - 1)/p, A = 1 andX is standard exponential. The simplest examples correspond to p small andinteger-valued; in particular, the density is
{ 3 (1 - (1 + 2x + 2x2)e-2x) p = 2
3 (1 - (1 + Zx + $x2 + 16x3 ) a-3x/2) p = 3.
(2.15)
In general, B(x) = O(x-P). The motivation for this class is the fact that theLaplace transform is explicit (which is not the case for the Pareto or otherstandard heavy-tailed distributions); in particular,
{ ()s(2.16)
1-s+3s2-9s3log(1+2s I p=3.
11
Example 2.12 (DISTRIBUTIONS WITH REGULARLY VARYING TAILS) The tail
B(x) of a distribution B is said to be regularly varying with exponent a if
B(x) - L(x), x
-+ 00, (2.17)
where L (x) is slowly varying , i.e. satisfies L(xt)/L(x) -4 1, x -4 oo (any L havinga limit in (0, oo) is slowly varying ; another standard example is (log x)'). Thus,examples of distributions with regularly varying tails are the Pareto distribution(2.12) (here L (x) -* 1) and (2.13), the loggamma distribution (with exponent5) and a Pareto mixture of exponentials. q

3. THE ARRIVAL PROCESS 11
Example 2.13 (THE SUBEXPONENTIAL CLASS OF DISTRIBUTIONS) We say that
a distribution B is subexponential if
limB`2^ = 2. (2.18)
x-roo B(x)
It can be proved (see IX.1) that any distribution with a regularly varying tail issubexponential. Also, for example the lognormal distribution is subexponential(but not regularly varying), though the proof of this is non-trivial, and so isthe Weibull distribution with 0 < r < 1. Thus, the subexponential class ofdistributions provide a convenient framework for studying large classes of heavy-tailed distributions. We return to a closer study in IX.1. q
When studying ruin probabilities, it will be seen that we obtain completelydifferent results depending on whether the claim size distribution is exponen-tially bounded or heavy-tailed. From a practical point of view, this phenomenonrepresents one of the true controversies of the area. Namely, the knowledge ofthe claim size distribution will typically be based upon statistical data, andbased upon such information it seems questionable to extrapolate to tail be-haviour. However, one may argue that this difficulty is not resticted to ruinprobability theory alone. Similar discussion applies to the distribution of theaccumulated claims (XI.4) or even to completely different applied probabilityareas like extreme value theory: if we are using a Gaussian process to predictextreme value behaviour, we may know that such a process (with a covariancefunction estimated from data) is a reasonable description of the behaviour ofthe system under study in typical conditions, but can never be sure whether thisis also so for atypical levels for which far less detailed statistical information isavailable. We give some discussion on standard methods to distinguish betweenlight and heavy tails in Section 4f.
3 The arrival process
For the purpose of modeling a risk process , the claim size distribution representsof course only one aspect (though a major one). At least as important is thespecification of the structure of the point process {Nt } of claim arrivals and itspossible dependence with the claims.
By far the most prominent case is the compound Poisson (Cramer-Lundberg)model where {Nt} is Poisson and independent of the claim sizes U1, U2,.... Thereason is in part mathematical since this model is the easiest to analyze, butthe model also admits a natural interpretation : a large portfolio of insuranceholders , which each have a (time-homogeneous) small rate of experiencing a

12 CHAPTER I. INTRODUCTION
claim , gives rise to an arrival process which is very close to a Poisson process,in just the same way as the Poisson process arises in telephone traffic (a largenumber of subscribers each calling with a small rate), radioactive decay (a hugenumber of atoms each splitting with a tiny rate ) and many other applications.The compound Poisson model is studied in detail in Chapters III, IV (and, withthe extension to premiums depending on the reserve, in Chapter VII).
To the author 's knowledge , not many detailed studies of the goodness-of-fitof the Poisson model in insurance are available . Some of them have concentratedon the marginal distribution of NT (say T = one year ), found the Poisson dis-tribution to be inadequate and suggested various other univariate distributionsas alternatives , e.g. the negative binomial distribution . The difficulty in suchan approach lies in that it may be difficult or even impossible to imbed such adistribution into the continuous set-up of {Nt } evolving over time , and also thatthe ruin problem may be hard to analyze . Nevertheless , getting away from thesimple Poisson process seems a crucial step in making the model more realistic,in particular to allow for certain inhomogeneities.
Historically, the first extension to be studied in detail was {Nt } to be renewal(the interarrival times T1 , T2.... are i.i.d. but with a general not necessarilyexponential distribution ). This model , to be studied in Chapter V, has somemathematically appealing random walk features , which facilitate the analysis.However , it is more questionable whether it provides a model with a similarintuitive content as the Poisson model.
A more appealing way to allow for inhomogeneity is by means of an intensity,3(t) fluctuating over time . An obvious example is 3(t) depending on the timeof the year (the season), so that ,8 (t) is a periodic function of t; we study thiscase in VI .6. Another one is Cox processes, where {/3 (t)}too is an arbitrarystochastic process . In order to prove reasonably substantial and interestingresults , Cox processes are, however, too general and one neeed to specialize tomore concrete assumptions . The one we focus on (Chapter VI) is a Markovianenvironment : the environmental conditions are described by a finite Markovprocess {Jt }too, such that 8(t) = ,(3; when Jt = i. I.e., with a common term{Nt} is a Markov-modulated Poisson process ; its basic feature is to allow morevariation (bursty arrivals ) than inherent in the simple Poisson process. Thismodel can be intuitively understood in some simple cases like { Jt} describingweather conditions in car insurance , epidemics in life insurance etc. In others, itmay be used in a purely descriptive way when it is empirically observed that theclaim arrivals are more bursty than allowed for by the simple Poisson process.
Mathematically, the periodic and the Markov-modulated models also haveattractive features . The point of view we take here is Markov -dependent randomwalks in continuous time (Markov additive processes ), see 11 . 5. This applies alsoto the case where the claim size distribution depends on the time of the year or

4. A SUMMARY OF MAIN RESULTS AND METHODS 13
the environment (VI.6) , and which seems well motivated from a practical pointof view as well.
4 A summary of main results and methods
4a Duality with other applied probability models
Risk theory may be viewed as one of many applied probability areas, others beingbranching processes, genetics models, queueing theory, dam/storage processes,reliability, interacting particle systems, stochastic differential equations, timeseries and Gaussian processes, extreme value theory, stochastic geometry, pointprocesses and so on. Some of these have a certain resemblance in flavour andmethodology, others are quite different.
The ones which appear most related to risk theory are queueing theory anddam/storage processes. In fact, it is a recurrent theme of this book to stressthis connection which is often neglected in the specialized literature on risktheory. Mathematically, the classical result is that the ruin probabilities forthe compound Poisson model are related to the workload (virtual waiting time)process {Vt}too of an initially empty M/G/1 queue by means of
,0 (u,T) = P(VT > u), 0(u) = P(V > u), (4.1)
where V is the limit in distribution of Vt as t -+ oo. The M/G/1 workloadprocess { Vt } may also be seen as one of the simplest storage models, with Poissonarrivals and constant release rule p(x) = 1. A general release rule p(x) meansthat {Vt} decreases according to the differential equation V = -p(V) in betweenjumps, and here (4.1) holds as well provided the risk process has a premiumrule depending on the reserve, R = p(R) in between jumps. Similarly, ruinprobabilities for risk processes with an input process which is renewal, Markov-modulated or periodic can be related to queues with similar characteristics.Thus, it is desirable to have a set of formulas like (4.1) permitting to translatefreely between risk theory and the queueing/storage setting. More generally,methods or modeling ideas developed in one area often has relevance for theother one as well.
A stochastic process {Vt } is said to be in the steady state if it is strictlystationary (in the Markov case, this amounts to Vo having the stationary distri-bution of {Vt}), and the limit t -4 oo is the steady-state limit. The study of thesteady state is by far the most dominant topic of queueing and storage theory,and a lot of information on steady-state r.v.'s like V is available. It should benoted, however, that quite often the emphasis is on computing expected valueslike EV. In the setting of (4.1), this gives only f0 O°i (u)du which is of limited

14 CHAPTER I. INTRODUCTION
intrinsic interest . Similarly, much of the study of finite horizon problems (oftenreferred to as transient behaviour) in queueing theory deals with busy periodanalysis which has no interpretation in risk theory at all. Thus , the two areas,though overlapping, have to some extent a different flavour.
A prototype of the duality results in this book is Theorem 11.3.1 , which givesa sample path version of (4.1) in the setting of a general premium rule p(x): theevents {VT > u} and {r (u) < T} coincide when the risk process and the storageprocess are coupled in a suitable way (via time-reversion ). The infinite horizon(steady state ) case is covered by letting T oo. The fact that Theorem H.3.1 isa sample path relation should be stressed : in this way the approach also appliesto models having supplementary r.v.'s like the environmental process {Jt} in aMarkov-modulated setting.
4b Exact solutions
Of course , the ideal is to be able to come up with closed form solutions for theruin probabilities 0(u), Vi(u,T). The cases where this is possible are basicallythe following for the infinite horizon ruin probability 0(u):
• The compound Poisson model with constant premium rate p = 1 andexponential claim size distribution B, B(x) = e-bx. Here O(u) = pe-ryuwhere 3 is the arrival intensity , p = 0/8 and -y = 8 -,3.
• The compound Poisson model with constant premium rate p = 1 and Bbeing phase-type with a just few phases . Here Vi(u) is given in terms of amatrix-exponential function (Corollary VIII . 3.1), which can be expandedinto a sum of exponential terms by diagonalization (see, e .g., ExampleVIII . 3.2). The qualifier 'with just a few phases ' refers to the fact that thediagonalization has to be carried out numerically in higher dimensions.
• The compound Poisson model with a claim size distribution degenerate atone point, see Corollary III.3.6.
• The compound Poisson model with some rather special heavy-tailed claimsize distributions, see Boxma & Cohen [74] and Abate & Whitt [3].
• The compound Poisson model with premium rate p(x) depending on thereserve and exponential claim size distribution B. Here ?P(u) is explicitprovided that , as is typically the case, the functions
w x f d 1 exdx() - p(y) y^ Jo p(x)
can be written in closed form, see Corollary VII.1.8.

4. A SUMMARY OF MAIN RESULTS AND METHODS 15
• The compound Poisson model with a two-step premium rule p(x) and Bbeing phase-type with just a few phases, see VIII.7.
• An a-stable Levy process with drift , where Furrer [150] recently computedii(u) as an infinite series involving the Mittag-Lef$er function.
Also Brownian models or certain skip-free random walks lead to explicit solu-tions (see XI . 1), but are somewhat out of the mainstream of the area . A notablefact (see again XI.1) is the explicit form of the ruin probability when {Rt} is adiffusion with infinitesimal drift and variance µ(x), a2 (x):
f °O exp {- ff 2µ(y)/a2(y) dy} dx - S(u)Ip (u) = f °D exp {- f f 2µ(y)/a2(y) dy} dx - 1 -
S(oo)(4.2)
where
S(u) = fU
eXp {- LX 2,u(y)/a2(y) dy}
is the natural scale.For the finite horizon ruin probability 0(u, T), the only example of some-
thing like an explicit expression is the compound Poisson model with constantpremium rate p = 1 and exponential claim size distribution . However , the for-mulas (IV.1) are so complicated that they should rather be viewed as basis fornumerical methods than as closed-form solutions.
4c Numerical methods
Next to a closed-form solution, the second best alternative is a numerical pro-cedure which allows to calculate the exact values of the ruin probabilities. Hereare some of the main approaches:
Laplace transform inversion Often, it is easier to find the Laplace trans-forms
= e8 ,b(u)du , [-s, esu-Tb(u, T) du dT
f TO 000
in closed form than the ruin probabilities z/'(u), (u, T) themselves. Giventhis can be done, Ab(u), O(u, T) can then be calculated numerically bysome method for transform inversion, say the fast Fourier transform (FFT)as implemented in Grubel [179] for infinite horizon ruin probabilities forthe renewal model. We don't discuss Laplace transform inversion much;relevant references are Grubel [179], Abate & Whitt [2], Embrechts, Grubel& Pitts [132] and Grubel & Hermesmeier [180] (see also the BibliographicalNotes in [307] p. 191).

16 CHAPTER L INTRODUCTION
Matrix-analytic methods This approach is relevant when the claim size dis-tribution is of phase-type (or matrix-exponential), and in quite a few cases(Chapter VIII), 0(u) is then given in terms of a matrix-exponential func-tion euu (here U is some suitable matrix) which can be computed bydiagonalization, as the solution of linear differential equations or by some
series expansion (not necessarily the straightforward Eo U'u/n! one!).
In the compound Poisson model with p = 1, U is explicit in terms of themodel parameters, whereas for the renewal arrival model and the Marko-vian environment model U has to be calculated numerically, either as theiterative solution of a fixpoint problem or by finding the diagonal form interms of the complex roots to certain transcendental equations.
Differential- and integral equations The idea is here to express 'O(u) or
'(u, T) as the solution to a differential- or integral equation, and carryout the solution by some standard numerical method. One example wherethis is feasible is the renewal equation for tl'(u) (Corollary III.3.3) in thecompound Poisson model which is an integral equation of Volterra type.However, most often it is more difficult to come up with reasonably simpleequations than one may believe at a first sight, and in particular the naiveidea of conditioning upon process behaviour in [0, dt] most often leads
to equations involving both differential and integral terms. An examplewhere this idea can be carried through by means of a suitable choice ofsupplementary variables is the case of state-dependent premium p(x) and
phase-type claims, see VIII.7.
4d Approximations
The Cramdr-Lundberg approximation This is one of the most celebratedresult of risk theory (and probability theory as a whole). For the compound
Poisson model with p = 1 and claim size distribution B with moment
generating function (m.g.f.) B[s], it states that
i/i(u) - Ce-"u, u -* oo, (4.3)
where C = (1 - p)/(13B'[ry] - 1) and -y > 0 is the solution of the Lundberg
equation
00['Y]-1)-'Y = 0, (4.4)
which can equivalently be written as
f3 [7] = 1 + .13

4. A SUMMARY OF MAIN RESULTS AND METHODS 17
It is rather standard to call ry the adjustment coefficient but a variety ofother terms are also frequently encountered. The Cramer-Lundberg ap-proximation is renowned not only for its mathematical beauty but alsofor being very precise, often for all u > 0 and not just for large u. Ithas generalizations to the models with renewal arrivals, a Markovian en-vironment or periodically varying parameters. However, in such cases theevaluation of C is more cumbersome. In fact, when the claim size distri-bution is of phase-type, the exact solution is as easy to compute as theCramer-Lundberg approximation at least in the first two of these threemodels.
Diffusion approximations Here the idea is simply to approximate the riskprocess by a Brownian motion (or a more general diffusion) by fitting thefirst and second moment, and use the fact that first passage probabilitiesare more readily calculated for diffusions than for the risk process itself.Diffusion approximations are easy to calculate, but typically not very pre-cise in their first naive implementation. However, incorporating correctionterms may change the picture dramatically. In particular, corrected diffu-sion approximations (see IV.6) are by far the best one can do in terms offinite horizon ruin probabilities '(u, T).
Large claims approximations In order for the Cramer-Lundberg approxi-mation to be valid, the claim size distribution should have an exponentiallydecreasing tail B(x). In the case of heavy-tailed distributions, other ap-proaches are thus required. Approximations for O(u) as well as for 1(u, T)for large u are available in most of the models we discuss. For example,for the compound Poisson model
J B dx, u -> oo. (4.6)^(u) pp u
In fact , in some cases the results are even more complete than for lighttails. See Chapter IX.
This list of approximations does by no means exhaust the topic; some furtherpossibilities are surveyed in 111 .7 and IV.2.
4e Bounds and inequalities
The outstanding result in the area is Lundberg's inequality
(u) < e-"lu.

18 CHAPTER I. INTRODUCTION
Compared to the Cramer-Lundberg approximation (4.3), it has the advantageof not involving approximations and also, as a general rule, of being somewhateasier to generalize beyond the compound Poisson setting. We return to variousextensions and sharpenings of Lundberg's inequality (finite horizon versions,lower bounds etc.) at various places and in various settings.
When comparing different risk models, it is a general principle that adding
random variation to a model increases the risk. For example, one expects a
model with a deterministic claim size distribution B, say degenerate at m, tohave smaller ruin probabilities than when B is non-degenerate with the samemean m. This is proved for the compound Poisson model in 111.8. However,empirical evidence shows that the general principle holds in a broad variety ofsettings, though not too many precise mathematical results have been obtained.
4f Statistical methods
Any of the approaches and results above assume that the parameters of themodel are completely known. In practice, they have however to be estimatedfrom data, obtained say by observing the risk process in [0, T]. This procedure
in itself is fairly straightforward; e.g., in the compound Poisson model, it splitsup into the estimation of the Poisson intensity (the estimator is /l3 = NT/T) and
of the parameter(s) of the claim size distribution, which is a standard statistical
problem since the claim sizes Ui, ... , UNT are i.i.d. given NT. However, the
difficulty comes in when drawing inference about the ruin probabilities. Howdo we produce a confidence interval? And, more importantly, can we trustthe confidence intervals for the large values of u which are of interest? In thepresent author's opinion, this is extrapolation from data due to the extremesensitivity of the ruin probabilities to the tail of the claim size distribution inparticular (in contrast, fitting a parametric model to U1, . . . , UNT may be viewed
as an interpolation in or smoothing of the histogram). For example, one mayquestion whether it is possible to distinguish between claim size distributionswhich are heavy-tailed or have an exponentially decaying tail. The standardsuggestion is to observe that the mean residual life
E[U - x U > x] = B(x) f '(y-x)B(dx)
typically has a finite limit (possibly 0) in the light-tailed case and goes to oo inthe heavy-tailed case, and to plot the empirical mean residual life
1
N - k (U(`) - U(k))i=k+ i

5. CONVENTIONS 19
as function of U(k), where U(1) < ... < U(N) are the order statistics basedupon N i.i.d. claims U1, ... , UN, to observe whether one or the other limitingbehaviour is apparent in the tail. See further Embrechts, Klnppelberg & Mikosch[134].
4g Simulation
The development of modern computers have made simulation a popular exper-imental tool in all branches of applied probability and statistics, and of coursethe method is relevant in risk theory as well. Simulation may be used just to getsome vague insight in the process under study: simulate one or several samplepaths, and look at them to see whether they exhibit the expected behaviour orsome surprises come up. However, the more typical situation is to perform aMonte Carlo experiment to estimate probabilities (or expectations or distribu-tions) which are not analytically available. For example, this is a straightforwardway to estimate finite horizon ruin probabilities.
The infinite horizon case presents a difficulty, because it appears to requirean infinitely long simulation. Truncation to a finite horizon has been used, butis not very satisfying. Still, good methods exist in a number of models and arebased upon representing the ruin probability zb(u) as expected value of a r.v.(or a functional of the expectation of a set of r.v's) which can be generatedby simulation. The problem is entirely analogous to estimating steady-statecharacteristics by simulation in queueing/storage theory, and in fact methodsfrom that area can often be used in risk theory as well . We look at a variety ofsuch methods in Chapter X, and also discuss how to develop methods which areefficient in terms of producing a small variance for a fixed simulation budget. Amain problem is that ruin is typically a rare event (i.e., having small probability)and that therefore naive simulation is expensive or even infeasible in terms ofcomputer time.
5 Conventions
Numbering and reference system
The basic principles are just as in the author's earlier book Applied Prob-ability and Queues (Wiley 1987; reference [14], in this book referred to as[APQ]). The chapter number is specified only when it is not the currentone. Thus Proposition 4.2, formula (5.3) or Section 3 of Chapter VI arereferred to as Proposition VI.4.2, formula VI.(5.3) and Section VI.3 (orjust VI.3), respectively, in all other chapters than VI where we just write

20 CHAPTER L INTRODUCTION
Proposition 4.2, formula (5.3) or Section 3. References like PropositionA.4, (A.29) refer to the Appendix.
Abbreviations
c.d.f. cumulative distribution function P(X < x)
c.g.f. cumulant generating function, i.e. log E[s] where b[s] is the m.g.f.
i.i.d. independent identically distributed
i.o. infinitely often
l.h.s. left hand side (of equation)
m.g.f. moment generating function, see under b[s] below.
r.h.s. right hand side (of equation)
r.v. random variable
s.c.v. squared coefficient of variation, EX2/(EX)2.
w.r.t. with respect to
w.p. with probability
Mathematical notation
P probability.
E expectation.
- Used in asymptotic relations to indicate that the ratio between twoexpressions is 1 in the limit. E.g. n! 27r nn+1/2e-n, n -i oo.
A different type of asymptotics: less precise, say a heuristic approxi-mation, or a more precise one like eh 1 + h + h2/2, h -+ 0.
- The same symbol B is used for a probability measure B(dx) = P(X Edx) and its c.d.f. B(x) = P(X < x) = fx. B(dy).
B[s] the m.g.f. (moment generating function) fm e82B(dx) of the distri-
bution B. If, as for typical claim size distributions, B is concentratedon [0, oo), b[s] is defined always if Rs < 0 and sometimes in a largerstrip (for example, if B(x) - ce-ax, then for 1s < 5). The Laplace
transform is b[-s].
B(x) the tail 1 - B(x) = P(X > x) of B.
IIGII the total mass (variation ) of a (signed ) measure G . In particular, fora probability distribution IIGII = 1, and for a defective probabilitydistribution IIGII < 1.

5. CONVENTIONS 21
{6B the mean EX = f xB(dx) of B
ABA' the nth moment EXn = f x"B(dx) of B.
I(A) the indicator function of the event A,
E[X;A] means E[XI(A)].
R(s) the real part of a complex number s.
0 marks the end of a proof, an example or a remark.
Xt_ the left limit limstt X8f i.e. the value just before t.
D [0, oo) the space of R-valued functions which are right-contionuous andhave left limits. Unless otherwise stated, all stochastic processes con-sidered in this book are assumed to have sample paths in this space.Usually, the processes we consider are piecewise continuous, i.e. onlyhave finitely many jumps in each finite interval. Then the assumptionof D-paths just means that we use the convention that the value ateach jump epoch is the right limit rather than the left limit.
In the French-inspired literature, often the term 'cadlag' (continuesa droite avec limites a gauche) is used for the D-property.
N(it, a2) the normal distribution with mean p and variance oa2.
Matrices and vectorsare denoted by bold letters. Usually, matrices have uppercase Romanor Greek letters like T, A, row vectors have lowercase Greek letterslike a, 7r, and column vectors have lowercase Roman letters like t,a. In particular:
I is the identity matrix
e is the column vector with all entries equal to 1
ei is the ith unit column vector, i.e. the ith entry is 1 and all other0. Thus, the ith unit row vector is e'i.
(the dimension is usually clear from the context and left unspecifiedin the notation). F o r a given set x1, ... , xa, of numbers,
(xi)diag denotes the diagonal matrix with the xi on the diagonal
(xi)row denotes the row vector with the xi as components
(xi),oi denotes the column vector with the xi as components
Special notation for risk processes
/3 the arrival intensity (when the arrival process is Poisson). Notationlike f3i and 3(t) in Chapter VI has a similar , though slightly morecomplicated, intensity interpretation.

22 CHAPTER L INTRODUCTION
B the claim size distribution. Notation like BE and B(t) in Chapter VIhas a similar, though slightly more complicated, interpretation.
J the rate parameter of B for the exponential case B(x) = e-by.
p the net amount /3pB of claims per unit time, or quantities with a similartime average interpretation, cf. I.1.
'q the safety loading , cf. I.1.
ry The adjustment coefficient.
FL, EL the probability measure and its corresponding expectation cor-responding to the exponential change of measure given by Lundbergconjugation, cf. e.g. 111.5, VI.5.

Chapter II
Some general tools andresults
The present chapter collects and surveys some topics which repeatedly show upin the study of ruin probabilities. Due to the generality of the theory, the levelof the exposition is, however, somewhat more advanced than in the rest of thebook. The reader should therefore observe that it is possible to skip most ofthe chapter, in particular at a first reading of the book. More precisely, therelevance for the mainstream of exposition is the following:
The martingale approach in Section 1 is essentially only used here. All resultsare proved elsewhere , in most cases via likelihood ratio arguments.
The likelihood ratio approach in Section 2 is basic for most of the modelsunder study. When encountered for the first time in connection with thecompound Poisson model in Chapter III, a parallel self-contained treat-ment is given of the facts needed there. The general theory is, however,used in Chapter VI on risk processes in a Markovian (or periodic) envi-ronment.
The duality results in Section 3 (and, in part, Sections 4, 5) are, strictlyspeaking, not crucial for the rest of the book. The topic is, however,fundamental (at least in the author's opinion) and the probability involvedis rather simple and intuitive.
Sections 4, 5 on random walks and Markov additive processes can be skippeduntil reading Chapter VI on the Markovian environment model.
23

24 CHAPTER II. SOME GENERAL TOOLS AND RESULTS
The ladder height formula in Theorem 6.1 is basic for the study of the com-pound Poisson model in Chapter III. The more general Theorem 6.5 canbe skipped.
1 Martingales
We consider the claim surplus process {St} of a general risk process. As usual,the time to ruin r(u) is inf It > 0 : St > u}, and the ruin probabilities are
ip(u) = P (T(u) < oo), V) (u, T) = P(T(u) < T).
Our first result is a representation formula for O(u) obtained by using themartingale optional stopping theorem . Let e(u) = ST(u) - u denote the over-shoot.
Proposition 1.1 Assume that (a) for some ry > 0, {e'YS° }t>0 is a martingale,
(b) St a$ -oo on {T(u) = oo}. Then
e-7u
(u) = E[e74(u)j7-(u) < oo]
Proof We shall use optional stopping at time r(u)AT (we cannot use the stoppingtime T(u) directly because P(T(u) = oo) > 0 and also because the conditions ofthe optional stopping time theorem present a problem; however, using r(u) A Tinvokes no problems because r(u) A T is bounded by T). We get
1 = Ee7So = Ee'Y S-(,.)AT
= E [e7ST(°); T(u) < T] + E [eryST ; T(u) > T] . (1.2)
As T -> oo, the second term converges to 0 by (b) and dominated convergence(e7ST < eryu on {r(u) > T}), and in the limit (1.2) takes the form
1 = E [e'ys-(-); T(u) < oo] + 0
= eryuE [e7Vu);T(u) < cc] = e7uE {e7f(u) I T(u) < cc] z/,(u).
Example 1 .2 Consider the compound Poisson model with Poisson arrival rate,0, claim size distribution B and p = ,QµB < 1. Thus
N,
StUi-t,f-1

1. MARTINGALES 25
where {Nt} is a Poisson process with rate ,Q and the U; are i.i.d. with commondistribution B (and independent of {Nt}). A simple calculation (see PropositionIII.1.1) shows that Eels- = e"(') where K(a) = ,Q(B[a] - 1) - a. From this itis readily seen (see III.6a for details) that typically a solution to the Lundbergequation K(y) = 0 exists, and thus Ee'rs° = 1. Since {St} has stationaryindependent increments, it follows that
E [e7st+v I J] = e"rstE [e7(st+v-St) I Ft] = e7StEe"rs° = elst
where .Ft = a(S" : v < t). Thus, condition (a) of Proposition 1.1 is satisfied, and(b) follows from p < 1 and the law of large numbers (see Proposition III.1.2(c)).
Example 1 .3 Assume that {Rt} is Brownian motion with variance constant o.2and drift p > 0. Then {St } is Brownian motion with variance constant o2 anddrift -p < 0. By standard formulas for the m.g.f. of the normal distribution,Eeas° = e"(°) where n(a) = a2a2/2 - ap. From this it is immediately seenthat the solution to the Lundberg equation ic(y) = 0 is -y = 2p/a2, and thusEe7s° = 1. Since {St} has stationary independent increments, the martingaleproperty now follows just as in Example 1.2. Thus, the conditions of Proposition1.1 are satisfied. q
Corollary 1.4 (LUNDBERG 'S INEQUALITY ) Under the conditions of Proposi-
tion 1 . 1, O(u) < e-7".
Proof Just note that C(u) > 0. q
Corollary 1.5 For the compound Poisson model with B exponential, B(x) _e-dx, and p =,3/6 < 1, the ruin probability is O(u) = pe- r" where -y = S - /3.
Proof Since
c(a) = /3(B[a] - 1) - a = -a - a
it is immediately seen that y = S - ,Q. Now at the time r(u) of ruin {St}upcrosses level u by making a jump . The available information on this jumpis that the distribution given r(u) = t and S,-(„)_ = x is that of a claim sizeU given U > u - x, and thus by the memoryless property of the exponentialdistribution , the conditional distribution of the overshoot e(u) = U - u + x isagain just exponential with rate S. Thus
E [e'rt (") I T(u) < oo] =I
00
f 5edxe5e- dx =

26 CHAPTER IL SOME GENERAL TOOLS AND RESULTS
Corollary 1.6 If {Rt} is Brownian motion with variance constant a2 and driftp > 0, then z/'(u) = e-7" where 'y = 21A/a2.
Proof Just note that ^(u) = 0 by continuity of Brownian motion. q
Notes and references The first use of martingales in risk theory is due to Gerber[156], and is further exploited in his book [157]. More recent references are Dassios &Embrechts [98], Grandell [171], [172], Embrechts, Grandell & Schmidli [131], Delbaen& Haezendonck [103] and Schmidli [320].
2 Likelihood ratios and change of measure
We consider stochastic processes {Xt} with a Polish state space E and pathsin the Skorohod space DE = DE[0, oo), which we equip with the natural filtra-tion {.Ft}too and the Borel a-field F. Two such processes may be represented
by probability measures F, P on (DE, F), and in analogy with the theory ofmeasures on finite dimensional spaces one could study conditions for the Radon-Nikodym derivative dP/dP to exist. However, as shown by the following exam-ple this set-up is too restrictive: typically', the parameters of the two processescan be reconstructed from a single infinite path, and F, P are then singular(concentrated on two disjoint measurable sets).
Example 2 .1 Let F, P correspond to the claim surplus process of two com-pound Poisson risk processes with Poisson rates /3, 0 and claim size distributions
B, B. The number Nt F) of jumps > e before time t is a (measurable) r.v. on
(DE,F), hence so is Nt = limfyo N2`i. Thus the sets
t =,6S = I tlim N-+oot S = { lim Nt
I t +00 t gJ
are both in F. But if a $ ^ , then S and S are disjoint , and by the law oflarge numbers for the Poisson process , F(S) = P(S) = 1. A somewhat similarargument gives singularity when B $ B. q
The interesting concept is therefore to look for absolute continuity only onfinite time intervals (possibly random, cf. Theorem 2.3 below). I.e., we look fora process {Lt} (the likelihood ratio process) such that
P(A) = E[Lt; A], A E Ft, (2.1)
'though not always: it is not difficult to construct a counterexample say in terms of tran-sient Markov processes.

2. LIKELIHOOD RATIOS AND CHANGE OF MEASURE 27
(i.e, that the restriction of P to (DE,.Tt) is absolutely continuous w.r.t. therestriction of P to (DE, .Pt))
The following result gives the connection to martingales.
Proposition 2.2 Let {Ft}t>o be the natural filtration on DE, F the Borel o•-
field and P a given probability measure on (DE,F).(i) If {Lt}t> o is a non-negative martingale w.r.t. ({Ft} , F) such that ELt = 1,
then there exists a unique probability measure Pon .F such that (2.1) holds.(ii) Conversely, if for some probability measure P and some {.Pt}-adapted pro-cess {Lt}t>o (2.1) holds, then {Lt} is a non-negative martingale w.r.t. ({.Ft}, P)such that LLt = 1.
Proof Under the assumptions of (i), define P by Pt (A) = E[Lt; A], A E F.Then Lt > 0 and ELt = 1 ensure that Pt is a probability measure on (DE, Ft).Lets < t, A E F8. Then
Ft (A) = E[Lt;A] = EE[LtI(A)IF8] = EI(A)E[LtIFB]
= EI(A)L8 = PS(A),
using the martingale property in the fourth step. Hence the family {Pt} ist>o
consistent and hence extendable to a probability measure F on (DE,Y) suchthat P(A) = Pt(A), A E Ft . This proves (i).
Conversely, under the assumptions of (ii) we have for A E rg and s < t thatA E Ft as well and hence E[L8; A] = E[Lt; A]. The truth of this for all A E Y.implies that E[LtI.F8] = L8 and the martingale property. Finally, ELt = 1follows by taking A = DE in (2.1) and non-negativity by letting A = {Lt < 0}.Then P(A) = E[Lt; Lt < 0] can only be non-negative if P(A) = 0. q
The following likelihood ratio identity (typically with r being the time r(u)to ruin) is a fundamental tool throughout the book:
Theorem 2 .3 Let {Lt}, P be as in Proposition 2.2(i). If r is a stopping timeand G E PT, G C {T < oo}, then {
_ ; 11
P(G) = EGJ . (2.2)
Proof Assume first G C {T < T} for some fixed deterministic T < oo. By themartingale property, we have E [LTIFT]
l
1 = LT on {T < T}. Hence
E [_ ; G] = E [LT ; G] = E [_I(G)E[LTIFT] ]
= E { _I(G)Lr] = P(G).

28 CHAPTER II. SOME GENERAL TOOLS AND RESULTS
In the general case , applying (2.3) to G of{r < T} we get 1111
F(Gn {r <T}) = E[ 1 ;Gn {r <T}1 .
Since everything is non-negative, both sides are increasing in T, and lettingT -* oo, (2.2) follows by monotone convergence. q
From Theorem 2.3 we obtain a likelihood ratio representation of the ruinprobability V) (u) parallel to the martingale representation (1.1) in Proposition1.1:
Corollary 2.4 Under condition (a) of Proposition 1.1,
,O(u) = e-ryuE[e-'YC(u); T(u) < oo]. (2.4)
Proof Letting G = {r(u) < oo}, we have F(G) = V )(u). Now just rewrite ther.h.s. of (2.2) by noting that
1 = e--rsr(„) = e-1'ue-7Ou).
Lr(u)
11
The advantage of (2.4) compared to (1.1) is that it seems in general easier todeal with the (unconditional) expectation E[e-ryVu); r(u) < oo] occuring therethan with the (conditional) expectation E[e'r{(u) Jr(u) < oo] in (1.1). The crucialstep is to obtain information on the process evolving according to F, and thisproblem will now be studied, first in the Markov case and next (Sections 4, 5)for processes with some random-walk-like structure.
Consider a (time-homogeneous) Markov process {Xt} with state space E,say, in continuous time (the discrete time case is parallel but slightly simpler).In the context of ruin probabilities, one would typically have Xt = Rt, Xt =
St, Xt = (Jt, Rt) or Xt = (Jt, St), where {Rt} is the risk reserve process,{St} = {u - Rt} the claim surplus process and {Jt} a process of supplementaryvariables possibly needed to make the process Markovian. A change of measureis performed by finding a process {Lt} which is a martingale w.r.t. each F,,, isnon-negative and has Ey Lt = 1 for all x, t. The problem is thus to investigatewhich characteristics of {Xt} and {Lt} ensure a given set of properties of thechanged probability measure.
First we ask when the Markov property is preserved. To this end, we needthe concept of a multiplicative functional. For the definition, we assume forsimplicity that {Xt} has D-paths, is Markov w.r.t. the natural filtration {.Ft}

2. LIKELIHOOD RATIOS AND CHANGE OF MEASURE 29
on DE and define {Lt} to be a multiplicative functional if {Lt} is adapted to{.Ft }, non-negative and
Lt+8 = Lt•(Lso9t) (2.5)
Px-a.s. for all x, s, t, where Ot is the shift operator. The precise meaning of thisis the following: being .Ft-measurable, Lt has the form
Lt = 'Pt ({x }0<u<t)
for some mapping cot : DE[O, t] -* [0, oo), and then
L. o 9t = V. ({Xt+u}0<u<8)
Theorem 2.5 Let {Xt} be Markov w.r.t. the natural filtration {Ft} on DE, let
{Lt} be a non-negative martingale with Ex Lt = 1 for all x, t and let Px be the
probability measure given by t,,(A) = Ex [Lt; A]. Then the family {Px}xEE de-
fines a time-homogeneous Markov process if and only if {Lt} is a multiplicative
functional.
Proof Since both sides of (2.5) are Tt+e measurable, (2.5) is equivalent to
Ex[Lt+8Vt+8] = E8[Lt • (L8 o 91)Vt+8] (2.6)
for any .Pt+8-measurable r.v. Vt+e, which in turn is the same as
Ex[Lt+8Zt • (V8 o Bt)] = Ex[Lt • (L8 o 91)Z1 • (Y8 o et)] (2.7)
for any Ft-measurable Zt and any .T9-measurable Y8. Indeed, since Zt • (Y8 o Ot )is .Ft+8-measurable, (2.6) implies (2.7). The converse follows since the class ofr.v.'s of the form Zt • (Y8 o 0t) comprises all r.v.'s of the form fl' f;(Xtitl) with
all t(i) < t + s.Similarly, the Markov property can be written
E.[Y,, o 9tI.Ft] = Ex,Y8f t < s,
for any .F8-measurable r.v. Y8, which is the same as
Ex[Zt(Y8 o Bt)] = E8[ZtEx,YB]
for any Ft-measurable r.v. Zt. By definition of Px, this in turn means
Ex[Lt+8Zt(V8 oet)] = Ex[LtZtExt[L8Y8]],
or, since Ext [L8Y8] = E[(Y8 o et)(L8 o 8t)I.Ft],
Ex[Lt+8Zt(Y8 o et)] = Ex[LtZt(Y8 o 0t)(L8 o Bt)], (2.8)
which is the same as (2.7). 0

30 CHAPTER H. SOME GENERAL TOOLS AND RESULTS
Remark 2.6 For {u , }xEE
to define a time-homogeneous Markov process, it
suffices to assume that {Lt} is a multiplicative functional with Ex Lt = 1 for allx, t. Indeed, then
E[Lt+B I.Ft] = LtE[L8 o 9t I. t] = LtExt L8 = Lt,
(using the Markov property in the second step) so that the martingale propertyis automatic. q
Notes and references The results of the present section are essentially knownin a very general Markov process formulation, see Dynkin [128] and Kunita [239]. A
more elementary version along the lines of Theorem 2.5 can be found in Kuchler &Sorensen [240], with a proof somewhat different from the present one.
3 Duality with other applied probability models
In this section, we shall establish a general connection between ruin probabilitiesand certain stochastic processes which occurs for example as models for queueingand storage. The formulation has applications to virtually all the risk modelsstudied in this book.
The result is a sample path relation, and thus for the moment no parametricassumptions (on say the structure of the arrival process) are needed. We workon a finite time interval [0, T] in the following set-up:
The risk process {Rt}o<t<T has arrivals at epochs or, .... , CN, 0 < vl < ...< aN < T. The corresponding claim sizes are Ul,... , UN. In betweenjumps, the premium rate is p(r) when the reserve is r (i.e., R = p(R)).Thus
fR = Ro + p(R8) ds - At where At = U. (3.1)
k: vk <t
The initial condition is arbitrary, Ro = u (say), and the time to ruin is7-(u) = inf {t > 0: Rt < 0}.
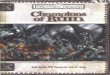
The storage process {Vt }o<t<T is essentially defined by time-reversion, re-flection at zero and initiar condition Vo = 0. More precisely , the arrivalepochs are Qi, ... , aN where or* = T -UN_k+l, and just after time or* {Vt}makes an upwards jump of size UU = UN_k+l. In between jumps, {Vt}

3. DUALITY WITH OTHER APPLIED PROBABILITY MODELS 31
decreases at rate p(r) when Vt = r (i.e., V = -p(V)). That is, instead of
(3.1) we have
Vt = At - f P(Vs)ds where A= U= AT - AT_t, (3.2)k: ok <t
and we use the convention p(O) = 0 to make zero a reflecting barrier (when
hitting 0, {Vt} remains at 0 until the next arrival).
Note that these definitions make {Rt} right-continuous (as standard) and {Vt}left-continuous. The sample path relation between these two processes is illus-trated in Fig. 3.1.
:.x......11 --4.__._...__.____•_..___ ._:
01}011 =T-01N ^N-3 T-o
0 011 014 01N
Figure 3.1
Define r(u) = inf It > 0: Rt < 0} (r(u) = oo if Rt > 0 for all t < T) and let
inf Rt < 0 P(r(u) < T)ii(u,T) =P (O<t<T
be the ruin probability.
Theorem 3.1 The events {T(u) < T} and {VT > u} coincide. In particular,
V)(u,T) = P(VT > u). (3.3)
Proof Let rt' denote the solution of R = p(R) subject to r0(u) = u. Then rt°)
> rt°) for all t when u > v.

32 CHAPTER IL SOME GENERAL TOOLS AND RESULTS
Suppose first VT > u (this situation corresponds to the solid path of {Rt} inFig. 3.1 with Ro = u = ul). Then
Vo, = r(VT) - U1 > roil - U1 = Rol.
If VaN > 0, we can repeat the argument and get VoN_1 > Ra2 and so on. Hence
if n satisfies VVN_n+1 = 0 (such a n exists, if nothing else n = N), we have
RQ„ < 0 so that indeed r(u) < T.Suppose next VT < u (this situation corresponds to the broken path of {Rt}
in Fig. 3.1 with Ro = u = u2). Then similarly
VVN = r0,T l - Ul < roil - Ul = RQ„ Va1V_1< RQ2,
and so on. Hence RQ„ > 0 for all n < N, and since ruin can only occur at thetimes of claims, we have r(u) > T. q
A basic example is when {Rt} is the risk reserve process corresponding toclaims arriving at Poisson rate ,3 and being i.i.d. with distribution B, and ageneral premium rule p(r) when the reserve is r. Then the time reversibility ofthe Poisson process ensures that {At } and {At } have the same distribution (forfinite-dimensional distributions, the distinction between right- and left continu-ity is immaterial because the probability of a Poisson arrival at any fixed timet is zero). Thus we may think of {Vt} as having compound Poisson input andbeing defined for all t < oo. Historically, this represents a model for storage, sayof water in a dam though other interpretations like the amount of goods storedare also possible. The arrival epochs correspond to rainfalls, and in betweenrainfalls water is released at rate p(r) when Vt (the content) is r. We get:
Corollary 3.2 Consider the compound Poisson risk model with a general pre-mium rule p(r). Then the storage process {Vt} has a proper limit in distribution,say V, if and only if O(u) < 1 for all u, and then
'0 (u) = P(V > u).
Proof Let T -► oo in (3.3). q
Notes and references Some main reference on storage processes are Harrison &Resnick [187] and Brockwell, Resnick & Tweedie [79]. Theorem 3.1 and its proof isfrom Asmussen & Schock Petersen [50], Corollary 3.2 from Harrison & Resnick [188].
The results can be viewed as special cases of Siegmund duality, see Siegmund [344].
Some further relevant more general references are Asmussen [21] and Asmussen &Sigman [51].
Historically, the connection between risk theory and other applied probability areasappears first to have been noted by Prabhu [293] in a queueing context. Nevertheless,one may feel that the interaction between the different areas has been surprisingly
limited even up to today.

4. RANDOM WALKS IN DISCRETE OR CONTINUOUS TIME 33
4 Random walks in discrete or continuous time
A random walk in discrete time is defined as X, = Xo + Y1 + • • • + Y, where theYi are i . i.d., with common distribution F (say). Here F is a general probabilitydistribution on R (the special case of F being concentrated on {-1, 1} is oftenreferred to as simple random walk or Bernoulli random walk). Most often, Xo =0.
For discrete time random walks , there is an analogue of Theorem 3.1 interms of Lindley processes . For a given i.i.d. R-valued sequence Z1, Z2 ,..., theLindley process Wo, W1, W2,... generated by Z1, Z2, ... is defined by assigningWo some arbitrary value > 0 and letting
Wn+1 = (Wn + Zn+1)+• (4.1)
Thus {Wn}n=o,1,... evolves as a random walk with increments Z1i Z2, ... as longas the random walk only takes non-negative values, and is reset to 0 once ther.w. hits (-oo, 0). I.e., {Wn}n=0,1,.., can be viewed as the reflected version ofthe random walk with increments Z1, Z2,.... In particular, if Wo = 0 then
WN = Zl+•••+ZN- min (Z1+•••+Zn) (4.2)n=0,1,...,N
(for a rigorous proof , just verify that the r .h.s. of (4.2) satisfies the same recursionas in (4.1)).
Theorem 4.1 Let r(u) = inf In: u + Y1 + • • • + Yn < 0}. Let further N befixed and let Wo, W1, . . . , WN be the Lindley process generated by Z1 = -YN,Z2 = -YN_1 i ..., ZN = - Y1 according to Wo = 0. Then the events {r(u) < N}and {WN > u} coincide.
Proof By (4.2),
WN = -YN - ... - Yl - min (-YN - ... - YN-n+1)n=0,1,..., N
min (Y1 + • • • + YN-n) min (Y1 + + Yn).n=0,1,...,N n=0,1,..., N
From this the result immediately follows. 0
Corollary 4.2 The following assertions are equivalent:(a) 0(u) = P(r(u) < oo) < 1 for all u > 0;(b) 1/i(u) = P(•r(u) < oo) -> 0 as u -* oo;(c) The Lindley process {WN} generated by Zl = -Y1, Z2 = -Y2, ... has aproper limit W in distribution as n -+ oo;

34 CHAPTER II. SOME GENERAL TOOLS AND RESULTS
(d) m = inf.=o,l.... (Yi + • • • + Yn) > -oo a.s.;(e)Yi+•••+Yn -74 - ooa.s.
In that case , W v -m and P(W > u) = P (-m > u) = 0(u).
Proof Since (YN,... , Y1) has the same distribution as (Y1, . .. , YN), the Lindleyprocesses in Corollary 4.2 and Theorem 4.1 have the same distribution for n =0,1, ... , N. Thus the assertion of Theorem 4.1 is equivalent to
WN D MN = sup (Z1 + ... + Z.)n=0,1,...,N
so that WN _P4 M = supra=0,1,... (Z1 + • • • + Zn) = -m and P(W > u) = P(M >u) = i (u). By Kolmogorov's 0-1 law , either M = oo a.s. or M < oo a.s.Combining these facts gives easily the equivalence of (a)-(d).
Clearly, (d) #. (e). The converse follows from general random walk theorysince it is standard that lim sup(Y1 + • • + Yn) = oo when Y1 + • • • + Yn 74 -oo.
0
By the law of large numbers, a sufficient condition for (e) is that EY is well-defined and > 0. In general, the condition
00F(YI+•••+ Yn<0)<00
n=1
is known to be necessary and sufficient ((APQ] p. 176) but appears to be ratherintractable.
Remark 4 .3 The i.i.d. assumption on the Z1,. .. , ZN or, equivalently, theY1, ... , YN in Theorem 4.1 is actually not necessary - the result is a sam-ple path relation as is Theorem 3.1. Similarly, there is a more general version ofCorollary 4.2. One then assumes Yn to be a stationary sequence, w.l.o.g. doublyinfinite (n'= 0, ±1, ±2, ...) and defines Zn = -Y-n. q
Next consider change of measure via likelihood ratios.
For a random walk, a Markovian change of measure as in Theorem 2.5 doesnot necessarily lead to a random walk: if, e.g., F has a strictly positive den-sity and the Px corresponds to a Markov chain such that the density of X1given Xo = x is also strictly positive, then the restrictions of Fx, Px to Fn areequivalent (have the same null sets) so that the likelihood ratio Ln exists. Thefollowing result gives the necessary and sufficient condition for {Ln} to define anew random walk:

4. RANDOM WALKS INDISCRETE OR CONTINUOUS TIME 35
Proposition 4.4 Let {Ln} be a multiplicative functional of a random walk withE_-L,, = 1 for all n and x. Then the change of measure in Theorem 2.5 corre-
sponds to a new random walk if and only if
Ln = h(Y1) ... h(Yn) (4.3)
1Px-a.s. for some function h with Eh(Y) = 1. In that case , the changed incre-ment distribution is F(x ) = E[h(Y); Y < x].
Proof If (4.3) holds, then
n n
Ex [f fa( YY) = Ex H fi (Y=) h(YY)i=1 i_1
H Ef=(Y=)h(Y=) = II J fi(Y)P(d)
from which the random walk property is immediate with the asserted form ofF. Conversely, the random walk property implies Ex f (Y1) = Eo f (Y1 ). SinceL1 has the form g (Xo, Y1), this means E(g(x, Y ) f (Y)] = E[g(O, Y) f (Y)] for allf and x, implying g(x, Y) = h(Y ) a.s. where h (y) = g(0, y). In particular, (4.3)holds for n = 1. For n = 2, we get
L2 = L1 (L1 o91 ) = h(Y1)g(X1,Y2) = h(1'i)h(I'a),
and so onforn =3,4,.... q
A particular important example is exponential change of measure (h(y) =e°y-'(") where r. (a) = log F (a] is the c .g.f. of F). The corresponding likelihoodratio is
Ln = exp {a (Y1 + • • • + Yn) - nrc(a)} (4.4)
({Ln} is the familiar Wald martingale , cf. e.g. Breiman [78] p. 100 ). We get:
Corollary 4.5 Consider a random walk and an a such that
c(a) = log F[a] = log Ee° '
is finite, and define Ln by (4.4). Then the change of measure in Theorem 2.5corresponds to a new random walk with changed increment distribution
J rF(x) = e-'(a) e"'F(dy) .

36 CHAPTER II. SOME GENERAL TOOLS AND RESULTS
Discrete time random walks have classical applications in queueing theoryvia the Lindley process representation of the waiting time , see Chapter V. Inrisk theory, they arise as models for the reserve or claim surplus at a discretesequence of instants, say the beginning of each month or year , or imbeddedinto continuous time processes , say by recording the reserve or claim surplusjust before or just after claims (see Chapter V for some fundamental examples).However , the tradition in the area is to use continuous time models.
The appropriate generalization of random walks to continuous time is pro-cesses with stationary independent increments (Levy processes). The traditionalformal definition is that {Xt} is R-valued with the increments
Xt(1)_t(o), Xt(2)_t(l), ... , Xt (n)-t(n-1)
being independent whenever t(O) < t(1 ) < ... < t(n) and with Xt(i)_t(i_l) hav-ing distribution depending only on t(i) - t(i - 1). An equivalent characterisationis {Xt} being Markov with state space R and
E [f (Xt+e - Xt)I.Ft] = Eof (X.). (4.5)
Note that the structure of such a process admits a complete description. Indiscrete time, {Xt} is a random walk, i.e. given by a the increment distributionF(x) = P(Xn+l - Xn < x). In continuous time, {Xt} can be written as theindependent sum of a pure drift {pt}, a Brownian component {Bt} (scaled bya variance constant) and a pure jump process {Mt},
Xt =Xo+pt+oBt+Mt. (4.6)
More precisely, the pure jump process is given by its Levy measure v(dx), apositive measure on R with the properties
Jex2v(dx) < oo,
fv(dx) < oo (4.7)
e x:IxJ>e}
for all e > 0. Roughly, the interpretation is that the rate of a jump of sizex is v(dx) (if f of Ixlv (dx) = oo, this description needs some amendments, butwe omit the details ). The simplest case is 3 = JhvMM < oo, which correspondsto the compound Poisson case: here jumps of {Mt} occur at rate 0 and havedistribution B = v/0 (in particular , the claim surplus process for the compoundPoisson risk model , with premium rate p, corresponds to a process with station-ary independent increments and u = -p, v2 = 0 and v = 3B). A general jumpprocess can be thought of as limit of compound Poisson processes with drift byconsidering a sequence v(n) of bounded measures with v(n) T v; however, we are

4. RANDOM WALKS IN DISCRETE OR CONTINUOUS TIME 37
almost solely concerned with the compound Poisson case and shall therefore nottreat the intricacies of unbounded Levy measures in detail.
Now consider reflected versions of processes with stationary independentincrements.
First assume in the setting of Section 3 that {Rt} is the risk reserve processfor the compound Poisson risk model with constant premium rate p(r) = 1.Then the storage process {Vt} has constant release rate 1, i.e. has upwards jumpsgoverned by B at the epochs of a Poisson process with rate ,3 and decreaseslinearly at rate 1 in between jumps. A different interpretation is as the workloador virtual waiting time process in an M/G/1 queue, defined as a system witha single server working at a unit rate, having Poisson arrivals with rate ,Q anddistribution B of the service times of the arriving customers. Here workloadrefers to the fact that we can interpret Vt as the amount of time the server willhave to work until the system is empty provided no new customers arrive; virtualwaiting time refers to Vt being the amount of time a customer would have towait before starting service if he arrived at time t (this interpretation requiresFIFO = First In First Out queueing discipline: the customers are served in theorder of arrival).
Corollary 4.6 In the compound Poisson risk model with constant premium ratep(r) - 1, O(u, T) = P(VT > u), where VT is the virtual waiting time at timeT in an initially empty M/G/1 queue with the same arrival rate /3 and theservice times having the same distribution B as the claims in the risk process.
Furthermore, VT + V for some r.v. V E [0, oo], and b(u) = P(V > u).
[The condition for V < oo a.s. is easily seen to be f3pB < 1, cf. Chapter III.]Processes with a more complicated path structure like Brownian motion or
jump processes with unbounded Levy measure are not covered by Section 3, andthe reflected version is then defined by means of the abstract reflection operatoras in (4.2),
WT = XT - min Xt (4.8)O<t<T
(assuming Wo = Xo = 0 for simplicity).
Proposition 4.7 If {Xt} has stationary independent increments as in (4.6),then
Ee'(xt-xo) = Eoeaxt = etx(a),
where
c(a) = ap + a2a2/2 + f (ex - 1)v(dx) (4.10)00
provided the Levy measure of the jump part {Mt} satisfies f", jxJ v(dx) < oo.

38 CHAPTER IL SOME GENERAL TOOLS AND RESULTS
Proof By standard formulas for the normal distribution,
Eea(µt+QBt) = et{aµ+a2OZ/2}.
By explicit calculation , we show in the compound Poisson case ( IlvIl < oo) inProposition III.1.1 that
eaMt = exp (eax - 1 )v(dx) .fmoo
E
In the general case , use the representation as limit of compound Poisson pro-cesses. q
Note that (4.10) is the Levy-Khinchine representation of the c.g.f. of an infinitelydivisible distribution (see, e .g., Chung [86]). This is of course no coincidencesince the distribution of Xl - Xo is necessarily infinitely divisible when {Xt}has stationary independent increments.
Theorem 4 . 8 Assume that {Xt} has stationary independent increments andthat {Lt} is a non-negative multiplicative functional of the form Lt = g(t, Xt -Xo) with E2Lt = 1 for all x, t. Then the Markov process given by Theo-rem 2. 5 has stationary independent increments as well. In particular, if Lt =e9(xt -xo)-tk (e), then the changed parameters in the representation (4.6) are
µ = µ + Oo2 , Q2 = v2, v(dx) = e9xv (dx). (4.11)
Proof For the first statement , we use the characterization (4.5) and get
E [f(Xt+B - Xt)I-'Ftl = E [f(Xt+B - Xt)L8 o 0tIFt]= E [f (Xt+s - Xt)g(s, Xt+B - Xt)I Ftl= Eof (X8)g(s, X8) = Eof (X8)L8
= Eof (X8)•
For the second, let e" (a ) = Eoeaxl. Then l
e"(a) = Eo [Liea "] = e-K (9)Eo {e (a+9)x1
JI = er(a+o )-K(B)
R(a) = K(a + 0) - 4o)rwaµ + ((a + 0 )2 - 02 )o2/2+ J (e(a+9)x - a9x )v(dx)00
00(eax - 1)eexv(dx).a(µ + O 2) + a2a2 /2 + J

5. MARKOV ADDITIVE PROCESSES 39
Remark 4.9 If X0 = 0, then the martingale {eex(t)-tk(e)} is the continuous
time analogue of the Wald martingale (4.4). q
Example 4 .10 Let Xt be the claim surplus process of a compound Poissonrisk process with Poisson rate ,3 and claim size distribution B, corresponding top = -1, a = 0, v(dx) _ ,(3B(dx). Then we can write
v(dx) _ /3eOxB(dx) = / (dx), where ,(3 = ,3B[B], B(dx) = B[9] B(dx).
Thus (since µ = p = -1, b = a = 0) the changed process is the claim surplusprocess of another compound Poisson risk process with Poisson rate ,l3 and claimsize distribution B. q
Example 4 .11 For an example of a likelihood ratio not covered by Theorem4.8, let the given Markov process (specified by the Px) be the claim surplusprocess of a compound Poisson risk process with Poisson rate 0 and claim sizedistribution B, and let the Px refer to the claim surplus process of anothercompound Poisson risk process with Poisson rate,3 =,3 and claim size distribu-tion B # B. Recalling that U1, 0.2, ... are the arrival times and U1, U2.... thecorresponding claim sizes , it is then easily seen that
Lt = H dB(Ui)i:o; <t
whenever the Radon-Nikodym derivative dB/dB exists (e.g. dB/dB = b/b whenB, B have densities b, b with b(x) > 0 for all x such that b(x) > 0). q
5 Markov additive processes
A Markov additive processes, abbreviated as MAP in this section2, is defined asa bivariate Markov process {Xt} = {(Jt, St)} where {Jt} is a Markov processwith state space E (say) and the increments of {St} are governed by {Jt} in the
sense that
E [f (St+8 - St)g(Jt+s)I.Ft] = Ejt,o[f (S8)g(J8)]. (5.1)
For shorthand , we write Pi, Ei instead of P2,0, Ei,0 in the following.As for processes with stationary independent increments , the structure of
MAP's is completely understood when E is finite:
2and only there ; one reason is that in parts of the applied probability literature, MAPstands for the Markovian arrival process discussed below.

40 CHAPTER H. SOME GENERAL TOOLS AND RESULTS
In discrete time, a MAP is specified by the measure-valued matrix (ker-nel) F(dx) whose ijth element is the defective probability distributionFij(dx) = Pi,o(Ji = j, Y1 E dx) where Y„ = S„ - Sr_1. An alternativedescription is in terms of the transition matrix P = (piA,jEE (here pij =Pi(J1 = j)) and the probability measures
Fij (dx)Hij(dx)=P(Y1 EdxlJo=i,J1=j)=
Pij
In simulation language, this means that the MAP can be simulated by firstsimulating the Markov chain {J„} and next the Y1, Y2, ... by generatingYn according to Hij when J„_1 = i, Jn = j.
If all Fij are concentrated on (0, oo), a MAP is the same as a semi-Markovor Markov renewal process, with the Y„ being interpreted as interarrivaltimes.
In continuous time (assuming D-paths), {Jt} is specified by its intensity ma-trix A = (Aij)i,jEE• On an interval [t, t+s) where Jt - i, {St} evolves likea process with stationary independent increments and the parameters pi,v;, vi(dx) in (4.6) depending on i. In addition, a jump of {Jt} from i toj # i has probability qij of giving rise to a jump of {St} at the same time,the distribution of which has some distribution Bij. (That a process withthis description is a MAP is obvious; the converse requires a proof, whichwe omit and refer to Neveu [272] or cinlar [87].)
If E is infinite a MAP may be much more complicated. As an example, let{Jt} be standard Brownian motion on the line. Then a Markov additiveprocess can be defined by letting
tSt = lim 1
oI(IJB1 < e)ds
E1o 2d
be the local time at 0 up to time t.
As a generalization of the m.g.f., consider the matrix Ft [a] with ijth element
Eileast
;it = A.
Proposition 5.1 For a MAP in discrete time and with E finite, Fn[a] = F[a]nwhere
P[a] = P,[a) = (Ei[easl; J1 ='^])iJEE = (Fij[a])i .9, EE =(iii&ij[a])i
jEE1

5. MARKOV ADDITIVE PROCESSES
Proof Conditioning upon (Jn, Sn ) yields
Ei[easn+'; Jn+1 = A] =
Ei[e 5„; Jn = k]Ek[e"Y"; J1 = A
kEE
41
which in matrix formulation is the same as Fn+1 [a] = Fn[a]F[a]. q
Proposition 5.2 Let E be finite and consider a continuous time Markov addi-tive process with parameters A, pi, 013 , vi(dx) (i E E), qij, Bij (i, j E E) and
So = 0. Then the matrix Pt[a] with ijth element Ei [east; Jt = j] is given byetK[a], where
K[a] = A+ (r.(')(a))diag
+ (),ijgij(Bij[a] - 1)) ,
00r(i) (a) = api + a2ot /2 + f (e° - 1 )v(dx).
Proof Let { Stt) } be a process with stationary independent increments and pa-
rameters pi , a= , vi(dx). Then, up to o (h) terms,
aSt h
= (1 + Ajjh)Ei [east; Jt = j] Ejesh'^
+ E Ak j hEi [ease ; Jt = k] { 1 - qkj + qkj Bkj [a] }k?^j
= Ei [east; Jt = j] (1 + htc (j) (a))
+h E Ei [east ; Jt = k] { xkj
+ Ak j qk j (Bk j la] - 1) }kEE
(recall that qjj = 0). In matrix formulation , this means that
F't+h [a] = Ft[a]\II+h(rc(i)(a))
diag+hA+h(Aijgij(Bij[a]-1)) I,
Ft[a] = Ft[a]K,
which in conjunction with Fo[a] = I implies Ft[a] = etK[a) according to thestandard solution formula for systems of linear differential equations. q
In the following, assume that the Markov chain/process {Jt} is ergodic. ByPerron-Frobenius theory (see A.4c), we infer that in the discrete time case the

42 CHAPTER II. SOME GENERAL TOOLS AND RESULTS
matrix F[a] has a real eigenvalue ic(a) with maximal absolute value and thatin the continuous time case K[a] has a real eigenvalue K(a) with maximal real
part. The corresponding left and right eigenvectors v("), h(") may be chosenwith strictly positive components. Since v("), h(") are only given up to a
constants, we are free to impose two normalizations, and we shall take
V(a)h(a) = 1, Yrh(a) = 1, (5.2)
where 7r = v(°) is the stationary distribution. Then h(°) = e.
The function ic(a) plays in many respects the same role as the cumulantg.f. of a random walk, as will be seen from the following results. In particular,its derivatives are 'asymptotic cumulants', cf. Corollary 5.7, and appropriate
generalizations of the Wald martingale (and the associated change of measure)
can be defined in terms of ,c(a) (and h(")), cf. Proposition 5.4.
Corollary 5.3 Ei [east, Jt = j] - h(a)vva)etw(a).
Proof By Perron-Frobenius theory (see A.4c).
We also get an analogue of the Wald martingale for random walks:
Proposition 5.4 Eie"sth(a) = h=a)et?("). Furthermore,
Jeast- tK(a)h(a) Jjj it Lo
is a martingale.
Proof For the first assertion, just note that
Eie"sth^a) = e'Pt[a]h(a) = e,etx [a]h(a) = eietK (a)h(a) = etK(a)h(a).
It then follows that
E feast+^-(t+v)K(a)h(a) I ^tll .Jt+v
= east-tK(a)E [ee (st+v-st)-vK(a)h(a)I ^tJjt+v
= east-tt(a)EJt (eases-vK(a )h^a)1 = east-tK(a)h^a).
q
Let k(a) denote the derivative of h() w.r.t. a, and write k = k(°).
Corollary 5.5 EiSt = tK'(0) + ki - Eikjt = ttc'(0) + ki - e=e°tk.

5. MARKOV ADDITIVE PROCESSES 43
Proof By differentiation in Proposition 5.4,
Ei [Steast h(a) + east k^a)1 = et"(a) (kia) + tic (a)hia)) . (5.3)
Let a = 0 and recall that h(°) = e so that 0=°) = h(o) = 1. q
The argument is slightly heuristic (e.g., the existence of exponential momentsis assumed ) but can be made rigorous by passing to characteristic functions. Inthe same way, one obtains a generalization of Wald 's identity EST = E-r • ES,for a random walk:
Corollary 5.6 For any stopping time T with finite mean, E=ST = tc '(0)E7- +k; - Eikjr .
Corollary 5.7 No matter the initial distribution v of Jo,
tam E tSt a (0), t im v^"St = '(0)
Proof The first assertion is immediate by dividing by tin Corollary 5.5. For thesecond , we differentiate (5.3) to get
Ej [St a"st h i(a ) + 2Ste"st k(a) + e"st k^a) J
etI(a) (kia )' + ttc (a)ki") + t {ic"(a)h;a) + ttc (a)2hia )+ W (a)k;") }) .
Multiplying by v=, summing and letting a = 0 yields
E„ [St + 2Stkj, ] = t2tc (0)2 + 2tK'(0)vk + ttc"(0) + O(1) .
Squaring in Corollary 5.5 yields
[E,St]2 = t2/c'(0 ) 2 + 2ttc (0)vk - 2ttc (0)Evkjt + 0(i).
Since it is easily seen by an asymptotic independence argument that E„ [Stkjt]= trc'(0 )E„kjt + O(1), subtraction yields Vary St = tic"(0) + O(1). q
Remark 5 . 8 Also for E being infinite (possibly uncountable ), Ee"st typicallygrows asymptotically exponential with a rate ic(a) independent of the initialcondition (i.e., the distribution of Jo). More precisely, there is typically a func-tion h = h(") on E and a ►c(a) such that
Ey a"st -t" (") -* h(x), t --a oo, (5.4)

44 CHAPTER IL SOME GENERAL TOOLS AND RESULTS
for all x E E. From (5.1) one then (at least heuristically ) obtains
lim Ex eaSv -vK(a)v-+oo
nEx east-tK(a)EJt eas-t-(v-t)K(a)u[J
= Ex east-tk(a)h(Jt)
It then follows as in the proof of Proposition 5.4 that
(5.5){ h(Jt) east-tK(a) Lo
is a martingale . In view of this discussion , we take the martingale property
as our basic condition below (though this is automatic in the finite case). Anexample beyond the finite case occurs for periodic risk processes in VI.6, where
{Jt} is deterministic period motion on E = [0, 1) (i.e., Jt = (s+t) mod 1 P8-a.s.forsEE). q
Remark 5.9 The condition that (5.5) is a martingale can be expressed via theinfinitesimal generator G of {Xt } = { (Jt, St) } as follows. First, G is defined as
Gf (x) = lim Exf (Xt) - f (x)tyo t
provided the limit exists. Usually, some extra conditions are imposed, in partic-ular that f is bounded;,for the present purposes, this is, however, inconvenientdue to the unboundedness of ea8 so we shall not aim for complete rigour but
interpret C in a broader sense. Given a function h on E, let ha(i, s) = ea8h(i).
We then want to determine h and x(a) such that Ejeasth (Jt) = etK(a)h(i). For
t small , this leads to
h(i) + tcha( i, 0) = h(i )(1 + ttc(a)),
gha(i, 0) = n(a) h(i). (5.6)
We shall not exploit this approach systematically; see, however, V.3b and Re-
mark VI.6.5. 0
Proposition 5.10 Let {(Jt, St)} be a MAP and let 0 be such that
h(Jt) OSt-t,(9){Lt}t>o = . h(Jo) Lo
is a Px -martingale for each x E E. Then {Lt } is a multiplicative functional,
and the family {f LEE given by Theorem 2.5 defines a new MAP.xEE

5. MARKOV ADDITIVE PROCESSES 45
Proof That { Lt} is a multiplicative functional follows from
L8 ogt = h(Jt+s) es(St+.-St)-sl(e)h(Jt)
The proof that we have a MAP is contained in the proof of Theorem 5.11 belowin the finite case . In the infinite case , one can directly verify that (5.1) holdsfor the P. We omit the details. q
Theorem 5.11 Consider the irreducible case with E finite. Then the MAP inProposition 5.10 is given by
ea'P = e-K(e) Oh e) F[e]Oh('),
f ij (dx) = Hij (dx)Hij [0]
in the discrete time case, and by
A = Oh(°) K [0]Oh(e ) r.(0)j, Ai = µi + 0Q, , ^i = of
qij Bij [0] eftvi(dx) = e"xvi
(dx), qij =1 + qij (Bij [0] - 1)
, Bi.7(dx) Bij [0] Bij(dx)
in the continuous time case . Here Oh(e) is the diagonal matrix with the h=e) onthe diagonal . In particular, if vi(dx) is compound Poisson, vi (dx) = f3 Bi(dx)with ,Qi < oo and Bi a probability measure , then also vi (dx) is compound Poissonwith
e
^i = /3iBi[0], Bi(dx) = Bi(dx).Bi [0]
Remark 5.12 The expression for A means
h(e)
Aij = hie)Aij [1 + gij(Bij[0] i 0 j. (5.7)
In particular, this gives a direct verification that A is an intensity matrix: theoff-diagonal elements are non-negative because Aij > 0, 0 < qij < 1 and
Bij [0] > 0. That the rows sum to 1 follows from
Ae = Oh(e) K[O]h(B) - ic(0)e = ic(0)Oh e) h(e) - ,c(0)e
= tc(0)e - tc(0)e = 0 .
That 0 < qij < 1 follows from the inequality
qb <1, 0<q<1, 0<b<oo.1 + q(b - 1)
Ox

46 CHAPTER II. SOME GENERAL TOOLS AND RESULTS
Proof of Theorem 5.11. First note that the ijth element of Ft[a] is
h(.e)E:[east; Jt = j] = Ej[Lteas' ; Jt = j] = hie)
e-tK(e)Ej [e(a+B)st; Jt = A.
In matrix notation , this means that
Ft[a] = e-tw (e)Ohc) Ft[a + 9]oh (e) (5.8)
Consider first the discrete time case . Here the stated formula for P followsimmediately by letting t = 1, a = 0 in (5.8). Further
Fib (dx ) = P=(YI E dx, Jl = j) = Ei[Lt; Yi E dx, Jl = j]
h(e)h(8) eey-K(B)p :(Yi E dx, Ji = j)
h(e)h=e) eex-K (e)Fi, (dx).
This shows that F, is absolutely continuous w.r.t. F:j with a density propor-
tional to eei . Hence the same is true for H=j and H;,; since Hij, H1, are
probability measures , it follows that indeed the normalizing constant is H1 [0].
Similarly, in continuous time (5.8) yields
)et(K[a+e]-K(e)I)Oh(°)
et'[a] = Ohie
By a general formula (A.13) for matrix-exponentials , this implies
k[a] = A -1 ) (K[a + 0] - tc(0)')Ah() = Oh(o) K[a + 0]Oh()
Letting a = 0 yields the stated expression for A.Now we can write
K[a] = A + A ) (K[a + 0] - K [O])Oh(e)
- tc(0)I.
l h (0)A + (tc(') (a + 0 ) - tc(') (8)/ d)ag + ( 7 Aiiii (Bii[a + 0] - Bay [0])
That k(') (a + 0) - tc (') (0) corresponds to the stated parameters µ;, v= , v; (dx)
of a process with stationary independent increments follows from Theorem 4.8.

6. THE LADDER HEIGHT DISTRIBUTION 47
Finally note that by (5.7),
h,)Ajjgij(Bij[a+0] - Bij[0]) = hjel)ijgijBij[0](Bij[a] - 1)
= Aij4ij(Bij[a] - 1).
Notes and references The earliest paper on treatment of MAP's in the present
spirit we know of is Nagaev [265]. Much of the pioneering was done in the sixtiesin papers like Keilson & Wishart [224], [225], [226] and Miller [260], [261], [262] indiscrete time; the literature on the continuous time case tends more to deal withspecial cases. Though the literature on MAP's is extensive, there is, however, hardlya single comprehensive treatment; an extensive bibliography on aspects of the theory
can be found in Asmussen [16].
Conditions for analogues of Corollary 5.3 for an infinite E are given by Ney &Nummelin [266]. For the Wald identity in Corollary 5.6, see also Fuh & Lai [149] andMoustakides [264]. The closest reference on exponential families of random walks ona Markov chain we know of within the more statistical oriented literature is Hoglund[203], which, however, is slightly less general than the present setting.
6 The ladder height distribution
We consider the claim surplus process {St } of a general risk process and the time7- (u) = inf {t > 0 : St > u} to ruin in the particular case u = 0 . Write r+ = T(0)and define the associated ladder height ST+ and ladder height distribution by
G+(x) = 11 (S,-, < x) = 11 (S,-+ < x, 7-+ < oo).
Note that G+ is concentrated on (0, oo), i.e., has no mass on (-oo, 0], and istypically defective,
IIG+II = G+(oo) = P(T+ < oo) = 0(0) < 1
when 77 > 0 (there is positive probability that {St} will never come above level0).

48 CHAPTER K. SOME GENERAL TOOLS AND RESULTS
M
ST+(2)
Sr, = ST+(1)
Figure 6.1
The term ladder height is motivated from the shape of the process {Mt}of relative maxima, see Fig. 6.1. The first ladder step is precisely ST+, and themaximum M is the total height of the ladder, i.e. the sum of all the ladder steps(if rl > 0, there are only finitely many). On Fig. 6.1, the second ladder point isST+(2) where r+(2) is the time of the next relative maximum after r+(1) = r+,the second ladder height (step) is ST+(2) - ST+(1) and so on. In simple caseslike the compound Poisson model, the ladder heights are i.i.d., a fact whichturns out to be extremely useful. In other cases like the Markovian environmentmodel, they have a semi-Markov structure (but in complete generality, thedependence structure seems too complicated to be useful). In any case, atpresent we concentrate on the first ladder height. The main result of this sectionis Theorem 6.5 below, which gives an explicit expression for G+ in a very generalsetting, where basically only stationarity is assumed.
To illustrate the ideas, we shall first consider the compound Poisson modelin the notation of Example 1.2. Recall that B(x) = 1 - B(x) denotes the tailof B.
Theorem 6 . 1 For the compound Poisson model with p = 01-LB < 1, G+ isgiven by the defective density g + (x) =,(3B(x ) = pbo(x) on (0,00 ). Here bo(x) _B(x)/µB.
For the proof of Theorem 6.1, define the pre-r+-occupation measure R+ by
R+(A) = Efo "o I(St E A,T+ > t)dt = E f T+I(St E A)dt. (6.1)
0
The interpretation of R+(A ) is as the expected time {St} spends in the set Abefore T+. Thus, R+ is concentrated on (-oo, 0], i.e., has no mass on (0, oo).Also, by approximation with step functions , it follows that for g > 0 measurable,
f
0 T+
g(y)R+(dy) = E f g(St)dt. (6.2)00 o

6. THE LADDER HEIGHT DISTRIBUTION 49
Lemma 6 .2 R+ is the restriction of Lebesgue measure to (-00, 0].
Proof Let T be fixed and define St = ST - ST_t, 0 < t < T. That is,{St }o<t<T is constructed from {St}o<t<T by time-reversion and hence, sincethe distribution of the Poisson process is invariant under time reversion, has thesame distribution as {St}o<t<T, see Fig. 6.2.
St S*t
a
Figure 6.2(a): T+ > t
Figure 6.2(b): r+ < t
Thus,
P(STEA,T+>T)
= P(STEA,St<0,0<t<T)
= F(ST E A, ST < ST_t, 0 < t < T)
P(STEA,ST<St,O<t<T)
= P(STEA,ST<St,O<t<T).

50 CHAPTER II. SOME GENERAL TOOLS AND RESULTS
Integrating w.r.t dT, it follows that R+ (A) is the expected time when ST is inA and at a minimum at the same time . But since St -4 -oo a.s., this is just theLebesgue measure of A, cf. Fig. 6.3 where the bold lines correspond to minimalvalues.
Figure 6.3
Lemma 6 .3 G+ is the restriction of /3R+*B to (0, oo). That is, for A C (0, oo),
0G+(A) = Q f B(A - y)R+(dy)00
Proof A jump of {St} at time t and of size U contributes to the event IS,, E A}precisely when r+ > t, U + St_ E A. The probability of this given {Su}u<t isB(A - St_)I(-r+ > t), and since the jump rate is /3, we get
G+ (A) = f 00 /3 dt E[B(A - St_); T+ > t]0
_ /3 f E[B(A - St);T+ > t] dt0
T+
_ /3E f g(St) dt = 0 f g(y)R+(dy)0 00
where g(y) = B(A - y) (here we used the fact that the probability of a jump att is zero in the second step, and (6.2) in the last). q

6. THE LADDER HEIGHT DISTRIBUTION 51
Proof of Theorem 6.1 With r+(y) = I(y < 0) the density of R+, Lemma 6.3yields
g+ (x) = ,Q f r+(x - z)B(dz) _ f I(x < z)B(dz) _ f (x).
0
Generalizing the set-up, we consider the claim surplus process {St }t>o of arisk reserve process in a very general set-up, assuming basically stationarity intime and space,
{St+8 - S8 )t>o = {St }t>o
for all s > 0. The sample path structure is assumed to be as for the compoundPoisson case: {St*} is generated from interclaim times Tk and claim sizes Ukaccording to premium 1 per unit time, i.e.
Nt
St =>Uk - t where Nt = max{k = O,1,...:T1 +•••+Tk <t}.k=1
The first ladder epoch r is defined as inf It > 0 : St > 0} and the correspondingladder height distribution is
G+* (A) = P(S** E A) = P(ST+ E A,T+ < oo).
The traditional representation of the input sequence {(TT, U k)}k=1 a is asa marked point process M*, i.e. as a point process on [0, oo) x (0, oo). Thepoints in the plane (marked by x on Fig. 6 .4) are (ak, Uk) (k = 1, 2, ...) whereak = Ti + • • • + Tk , the first component representing time (the arrival time o,* )and the second the mark (the claim size Uk ). The marked point process .M o 08shifted by s is defined the obvious way, cf. Fig. 6 . 4 (the points in the plane are(ak - s, Uk) for those k for which ak - s > 0). We call M * stationary if M* o B8has the same distribution as M* for all s > 0; obviously, this is equivalent tothe risk process {St*} being stationary in the sense of (6.4). In the stationarycase , we define the arrival rate as E# {k : ak E [0 , h]} /h (by stationarity,this does not depend on h).

52 CHAPTER II. SOME GENERAL TOOLS AND RESULTS
M*
1U2
UsUi.
-1_0 or Q2 $
U3*1
L0
7 11 1
X
Figure 6.4I
Given a stationary marked point process M*, we define its Palm version Mas a marked point process having the conditional distribution of M* given anarrival at time 0 , i.e. o, = 0 . We represent M by the sequence (Tk, Uk) k=1,2,...where TI = 0, and let T = T2 denote the first proper interarrival time . The twofundamental formulas connecting M* and M are
Eco(M) = aE E, V(M* o eak ),k: vk E [0, h]
Eco(M*) = 1 E f co(M o Bt)dt,
where T is the first arrival time > 0 of M and h > 0 an arbitrary constant (inthe literature , most often one takes h = 1). As above , the r .h.s. of (6.5) does not
depend on h; letting h J. 0, Oh becomes the approximate probability F(ri < h)of an arrival in [0, h] and the sum approximately ^o(M*)I(ul < h). This moreor less gives a proof that indeed (6.5) represents the conditional distribution ofM* given vi = 0. Note also that (again by stationarity ) the Palm distributionalso represents the conditional distribution of M* o Ot given an arrival at timet. See, e.g., Sigman [348] for these and further aspects of Palm theory.
Example 6 .4 Consider a finite Markov additive process (cf. Section 5) whichhas pure jump structure corresponding to pi = a = 0, vi(dx) = ,QiBi(dx).
Assume {Jt} irreducible so that a stationary distribution 7r = (1i)iGE exists.

6. THE LADDER HEIGHT DISTRIBUTION 53
Interpreting jump times as arrival times and jump sizes as marks, we get amarked point process generated by Poisson arrivals at rate /3i and mark distri-bution Bi when Jt = i, and by some additional arrivals which occur w.p. qijwhen {Jt} jumps from i to j and have mark distribution Bij. A stationarymarked point process M* is obtained by assigning Jo distribution Tr. If Jt_ = i,an arrival for M* occurs before time t + dt w.p.
dt A + E Aijgij
j#i
Thus the arrival rate for M* is
1] it A + E Aijgij
iEE i#i
Given that an arrival occurs at time t , the probability aij of Jt- = i, Jt = j isiri(3i /,O for i = j and iriAijgij/,O for i # j. It follows that we can describe thePalm version M as follows . First choose (Jo_, Jo) w.p. aij for (i, j) and let theinitial mark Ul have distribution Bi when i = j and Bij otherwise . After that,let the arrivals and their marks be generated by {Jt} starting from Jo = j.
Note in particular that the Palm distribution of the mark size (i.e., thedistribution of Ul) is the mixture
B = E aii Bi + aij Bij J = !i J,6iBi + Aijgij Bij
iEE j#i iEE 0 j#i
Theorem 6 .5 Consider a general stationary claim surplus process {St }t>o, letU0 be a r. v. having the Palm distribution of the claim size and F (x) = F(Uo < x)its distribution . Assume that St -* -oo a.s . and that p = 0EU0 < 1. Then theladder height distribution G+ is given by the (defective) density g+(x) = ,OF(x).
Before giving the proof, we note:
Corollary 6.6 Under the assumptions of Theorem 6.5, the ruin probability,/,*(0) with initial reserve u = 0 is p = /3EU0.
This follows by noting that
iP*(0) = IIG+JI = J "o g+(x)dx = ,Ofo"o F(x)dx = ,OEU0.
0

54 CHAPTER H. SOME GENERAL TOOLS AND RESULTS
By (6.5),
V` (0) = E E Ukk: ak E [0,1]
here the r . h.s. has a very simple interpretation as the average amount of claimsreceived per unit time . The result is notable by giving an explicit expressionfor a ruin in great generality and by only depending on the parameters of themodel through the arrival rate 0 and the average ( in the Palm sense) claim size
EU0. The last property is referred to as insensitivity in the applied probability
literature.
Proof of Theorem 6.5. A standard argument for stationary processes ([78] p. 105)shows that one can assume w.l.o.g. that M* and M have doubly infinite time(i.e., are point processes on (-oo , oo) x (0 , oo)). We then represent M by the
mark (claim size ) Uo of the arrival at time 0, the arrival times 0 < 0'1 < Q2 < ...
in (0, oo ) and the arrival times 0 > 0_1 > a_2 > ... in (-oo, 0); the mark attime Qk is denoted by Uk.
Let p(t) be the conditional probability that ST+ E A, T+ = t given the eventAt that an arrival at t occurs . Then clearly
G+* (A) = P(ST+ E A) = f p(t)f3dt.
Consider a process {St}t>o
, which makes an upwards jump at time -o,-A; (k =
1, 2, ...), moves down linearly at a unit rate in between jumps and starts from
S0 = U.
Now conditionally upon At , {Su}0<u<t is distributed as a process {Su}- - o<u<t
where a claim arrives at time t and has size Uo, and the kth preceding claimarrives at time t - Q_k and has size U_ k. The sample path relation between
{ Su } and { Su } amounts to S„ = St - St*_ u- (left limit ) when 0 < it < t and
is illustrated on Fig . 6.5. It follows that for A C (0, oo)
p(t) = P(St EA,Su< 0,0<u<tIAt)
= P(St EA,Su_ <0,0<u<tIAt)
= P(St EA,Su-<0,0<u<t)
= P(St EA,St <,$St_u,0<u<t)
= P(StEA,St<Su, 0<u<t)
= P(St EA;Mt),

6. THE LADDER HEIGHT DISTRIBUTION
{ Su}0<u<tU0
A
U0
\t
NU_1
Figure 6.5
55
u>0
tt
where it = { St < Su, 0 < u < t } is the event that { Su } has a relative min-
imum at t . In Fig . 6.5, time instants corresponding to such minimal values
have been marked with bold lines in the path of { St}, and we let L(dy) be
the random measure L(A) = fo°° I(St E A; NIt)dt . Since So = U0, the supportof L has right endpoint U0, and since by assumption St -* -oo a.s., t -a oo,the left endpoint of the support is -oo. A sample path inspection just as inthe proof of Lemma 6 . 2 therefore immediately shows that L(dy) is Lebesguemeasure on (-oo, Uo], cf. Fig . 6.5 where the boxes on the time axis correspond
to time intervals where {St } is at a minimum belonging to A and split A into
pieces corresponding to segments where {Su} is at a relative minimum. Thus,
G' (A) = 3 fo "o
P(St E A; Mt)dt = i3EL(A)

56 CHAPTER II. SOME GENERAL TOOLS AND RESULTS
P (Uo>y)dy= OE f 0 I(Uo>y)I(yEA)dy = Q fA
I0o
a fA P(y) dy•
0
Notes and references Theorem 6.5 is due to Schmidt & co-workers [48], [147],
[263] (a special case of the result appear in Proposition VI.2.1). A further relevant
reference related to Corollary 6.6 is Bjork & Grandell [67].

Chapter III
The compound Poissonmodel
We consider throughout this chapter a risk reserve process {Rt }t>o in the ter-minology and notation of Chapter I, and assume that
• {Nt}t>o is a Poisson process with rate j3.
• the claim sizes U1, U2, ... are i . i.d. with common distribution B, say, andindependent of {Nt}.
• the premium rate is p = 1.
Thus , {Rt} and the associated claims surplus process {St} are given by
Nt Nt
Rt = u+t -EUi, St = u-Rt = EUi -t.i=1 i=1
An important omission of the discussion in this chapter is the numericalevaluation of the ruin probability. Some possibilities are numerical Laplacetransform inversion via Corollary 3.4 below , exact matrix-exponential solutionsunder the assumption that B is phase-type (see further VIII .3), Panjer's recur-sion (Corollary XI . 4.6) and simulation methods (Chapter X). For finite horizonruin probabilities , see Chapter IV.
It is worth mentioning that much of the analysis of this chapter can be carriedover in a straightforward way to more general Levy processes . A common viewof the literature is to consider such processes as perturbed compound Poissonrisk processes , i.e. being of the form Rt = Rt+Bt + Jt where {Rt } is a compound
57

58 CHAPTER III. THE COMPOUND POISSON MODEL
Poisson risk process, {Bt} a Brownian motion and {Rt} a pure jump process,say stable Levy motion. We do not spell out in detail such generalizations. Seee.g. Dufresne & Gerber [126], Schmidli [319], [324], Furrer [150], and Schlegel
[316].
1 Introduction
For later reference, we shall start by giving the basic formulas for moments,
cumulants , m.g.f.'s etc. of the claim surplus St - u - Rt. Write
pB^) = EUn' YB = Pali = EU, P = PAB = 1/(1 + rl)
Proposition 1.1 (a) ESt = t(13µ$ - 1) = t(p - 1);
(b) Var St= t,6pBa);
(c) Ee8St = et" (8) where c(s) = f3(B[s] - 1) - s;
(d) The kth cumulant of St is tf3p(k) for k > 2.
Proof It was noted in Chapter I that p - 1 is the expected claim surplus per unit
time, and this immediately yields (a). A more formal proof goes as follows:
Nt r Nt
ESt = E > U k - t = E E [ U k Nt - tk=1 k=1
= E[Ntµs] - t = fltpB - t = t(p - 1).
The same method yields also the variance as
Nt Ne
Var St = Var E Uk = Var E ^ Ukk=1 k=1
Nt
Nt +EVar [ Uk1 k=1
Nt
Var [Ntµs] + E[NtVar U] = 113µs + t13Var U = tf3pB2).
For (c), we get
Ee8st =00
e-8t c` Ee8 (U1+...+Uk)P(Nt = k)
k=O
e-8t B[s]k , e-)3t (fit' k
k=Oexp {-st -'3t + B[s]ft} = etk(8)
Finally, for (d) just note that the kth cumulant of St is tic(k) (0), where K(k) (0)
is the kth derivative of is at 0, and that B(k)[0] = Pak). 0

1. INTRODUCTION 59
The linear way the index t enters in the formulas in Proposition 1.1 is thesame as if {St} was a random walk indexed by t = 0, 1, 2,.... The connectionsto random walks are in fact fundamental, and there are at least two ways toexploit this:
Recalling that ok is the time of the kth claim, we have Sok - Sok_l = Uk - Tk,where Tk is the time between the kth and the (k - 1)th claim. Obviously, theUk - Tk are i.i.d. so that {Sok } is a random walk with mean
EU-ET = EU- 1 = ,3EU0-1 = -1µs
where rt is the safety loading. In this way, we get a discrete time random walkimbedded in the claim surplus process {St}, which is often used in the literaturefor obtaining information about {St} and the ruin probabilities. For example,obviously 0(u) = F(maxk Sok > u). We return to this approach in Chapter V.
The point of view in the present chapter is, however, rather to view {St}directly as a random walk in continuous time, meaning that the increments arestationary and independent, cf. II.4. Here is one immediate application:
Proposition 1.2 (DRIFT AND OSCILLATION)
St/ta3'p-1 ast ->oo;
(b) If 77 < 0, then St 4 co;
(c) If 77 > 0, then St -00;
(a) No matter the value of 77,
(d) If 17 = 0, then lien inft, St = -oo, lim supt. St = oo.
For the proof, we need the following lemma:
Lemma 1.3 If nh < t < (n + 1)h, then
Snh - h < St < S(n+1)h + h.
Proof We first note that for u, v > 0,
S„+V > S„ - V.
Indeed, Sn+0 - S„ attains its minimal value when there are no arrivals in (u, u +v], and the value is then precisely v. In particular, if t = nh + v with 0 < v < h,then
St> Snh-V>Snh-h.
The right hand inequality in (1.3) is proved similarly.

60 CHAPTER III. THE COMPOUND POISSON MODEL
Proof of Proposition 1.2. For any fixed h, {Snh}n=o,1,... is a discrete time random
walk, and hence by the strong law of large numbers, Snh/n a4' ESh = h(p - 1).Thus using Lemma 1.3, we get
lim inf St = lim inf inf Stt->oo t n-roo nh<t<(n+1)h t
h l++m of Sn 7t h = -ESh = p - 1.h
A similar argument for lim sup proves (a), and (b), (c) are immediate conse-quences of (a). Part (d) follows by a (slightly more intricate) general randomwalk result ([APQ], p. 169) stating that lim infra, 0 Snh = -00, lim supn_,,,. Snh= 00 (the lemma is not needed for (d)). q
Corollary 1.4 The ruin probability 0(u) is 1 for all u when 77 < 0, and < 1for all u when 77 > 0.
Proof The case of 17 < 0 is immediate since then M = oo by Proposition 1.2. If
rl > 0, it suffices to prove 4'(0) = F(M > 0) < 1. However, if P(M > 0) = 1,then {St} upcrosses level 0 a.s. at least once. Considering the next downcrossing(which occurs w.p. 1 since St -4 -oo) and repeating the argument, it is seenthat upcrossing occurs at least twice, hence by induction i.o. This contradictsSt-4-00. q
There is also a central limit version of Proposition 1.2:
Proposition 1.5 The limiting distribution of St - t - 1) as t -4 oo is normalvt-
with mean zero and variance )3µsz)
Proof Since {St}t>o is a Levy process (a random walk in continuous time),{Snh}n=o,1,._. is a discrete-time random walk for any h > 0, and hence it fol-
zlows from standard central limit theory and the expression Var(St) = tf3pB(Proposition 1.1(b)) that the assertion holds as t -4 oo through values of theform t = 0, h, 2h.... The general case now follows either by another easy ap-plication of Lemma 1.3, or by a general result on discrete skeletons ([APQ] p.
307). q
Remark 1 .6 Often it is of interest to consider size fluctuations, where the size
of the portfolio at time t is M(t). Assuming that each risk generates claims atPoisson intensity /3 and pays premium 1 per unit time, this case can be reducedto the compound Poisson model by an easy operational time transformationT-1(t) where T(s) = )3 fo M(t)dt. q
Notes and references All material of the present section is standard.

2. THE POLLACZECK-KHINCHINE FORMULA 61
2 The Pollaczeck-Khinchine formula
The time to ruin r(u) is defined as in Chapter I as inf It > 0: St > u}, and
we shall here exploit the decomposition of the maximum M as sum of ladderheights, cf. Fig. 11.6.1. We assume throughout rl > 0 or, equivalently, p < 1.
It is crucial to note that for the compound Poisson model, the ladder heights
are i. i. d.. This follows simply by noting that the process repeats itself afterreaching a relative maximum. The decomposition of M as a sum of ladderheights now yields:
00
Theorem 2 . 1 The distribution of M is (1- IIG+II)EG+ , where G+ is givenn=0
by the defective density g+ (x) = 3B (x ) = pbo(x) on (0, oo ). Here bo(x) _
B(x)/aB.
Proof The probability that M is attained in precisely n ladder steps and doesnot exceed x is G+ (x)(1 - IIG+II) (the parenthesis gives the probability thatthere are no further ladder steps after the nth ). Summing over n, the formulafor the distribution of M follows . The expression for g+ was proved in Theorem
11.6.1. 0
Alternatively, we may view the ladder heights as a terminating renewal pro-cess and M becomes then the lifetime.
Combined with i/i(u) = P (M > u), Theorem 2.1 provides a representation
formula for 0(u), which we henceforth refer to as the Pollaczeck-Khinchine for-mula. Note that the distribution B0 with density bo is familiar from renewaltheory as the limiting stationary distribution of the overshoot (forwards recur-
rence time), [APQ] Ch. IV.3-4 or A. 1e. Thus , we can rewrite the Pollaczeck-
Khinchine formula as
00
(u) = P (M > u) = (1 - P) E PnBon(u) , (2.1)n=0
representing the distribution of M as a geometric compound.As a vehicle for computing tIi(u), (2.1) is not entirely satisfying because of the
infinite sum of convolution powers, but we shall be able to extract substantialinformation from the formula, nevertheless.
The following results generalizes the fact that the conditional distribution of
the deficit ST(o) just after ruin given that ruin occurs (i.e., that r(0) < oo) isBo: taking y = 0 shows that the conditional distribution of (minus) the surplus-ST(o)- just before ruin is again B0, and we further get information aboutthe joint conditional distribution of the surplus and the deficit. Note that this

62 CHAPTER III. THE COMPOUND POISSON MODEL
distribution is the same as the limiting joint distribution of the age and excesslife in a renewal process governed by B, cf. Theorem A1.5.
Theorem 2 . 2 The joint distribution of (-ST(o )_, ST(o)) is given by the follow-ing four equivalent statements:
(a) 11 (-ST(o)_ > x, ST(o) > y; 7r(0 ) < oo) = Qf
B(z) dz;+b
(b) the joint distribution of (-ST(o)-, ST(o )) given r (0) < oo is the same as thedistribution of (VW, (1 - V)W) where V, W are independent , V is uniform on(0, 1) and W has distribution Fw given by dFyy/dB(x) = x/µB;(c) the marginal distribution of -ST(o)_ is Bo , and the conditional distribution
of ST(o) given -ST(o)_ = y is the overshoot distribution B(Y) given by Bov)(z) _Bo (y + z)/Bo(y);(d) the marginal distribution of ST(o)_ is B0, and the conditional distribution of
-ST(o)_ given ST(o)_ = z is Bo z)
The proof is given in IV.2 and it gives an alternative derivation of the distribu-tion of the deficit ST(o)
Notes and references The Pollaczeck-Khinchine formula is standard in queueingtheory, see for example [APQ], Feller [143] or Wolff [384]. The proof of Theorem 11.6.1 istraditionally carried out for the imbedded discrete time random walk, where it requiresslightly more calculation. As shown in Theorem 11.6.5, the form of G+ is surprisinglyinsensitive to the form of {St} and holds in a certain general marked point processset-up. However, in this setting there is no decomposition of M as a sum of i.i.d.
ladder heights so that the results do not appear not too useful for estimating 0(u) foru>0.
Theorem 2.2(a) is from Dufresne & Gerber [125]. Again, there is a general markedpoint process version, cf. Asmussen & Schmidt [49]. For the study of the joint distri-bution of the surplus ST(u)_ just before ruin and the deficit ST(„)- just after ruin, seeSchmidli [323] and references there.
In the risk theory literature, the Pollaczeck-Khinchine formula is often referred toas Beekman 's convolution formula, cf. Beekman [61], [62].
3 Special cases of the Pollaczeck-Khinchine for-mula
The model and notation is the same as in the preceding sections. We assumert > 0 throughout.

3. SPECIAL CASES OF POLLACZECK-KHINCHINE 63
3a The ruin probability when the initial reserve is zero
The case u = 0 is remarkable by giving a formula for V)(u) which depends only
on the claim size distribution through its mean:
Corollary 3.1 0(0) = p = Nl2B = 11 +71
Proof Just note that (recall that T+ = r(0))
00
z/^(0) = I' (-r+ < oo) = IIG+II = )3 f(x)dx =l3LB•
Notes and references The fact that tp(u) only depends on B through µB is often
referred to as an insensitivity property. As shown in 11.6, the formula for P(O) holds
in a more general setting; a further relevant reference is Bjork & Grandell [67].
3b Exponential claims
Corollary 3.2 If B is exponential with rate S, then,0(u) = pe-(a-A)"
Proof The distribution Bo of the ascending ladder height (given that it is
defined ) is the distribution of the overshoot of {St} at time r+ over level 0. Butclaims are exponential , hence without memory, and hence this overshoot hasthe same distribution as the claims themselves . I.e., B0 is exponential with rate
S and the result can now be proved from the Pollaczeck-Khinchine formula by
elementary calculations . Thus , Bon is the Erlang distribution with n phases
and thus the density of M at x > 0 is
1(1 - p) E pn Sn xn- e -ax =(1 - p)pSe- a ( l -v)x = p(S - O)e-(b-0)x.
00n-1 (n - 1)1
Integrating from u to oo, the result follows . Alternatively, use Laplace trans-
forms.The result can, however , also be seen probabilistically without summing
infinite series . Let r (x) be the failure rate of M at x > 0. For a failure at x, thecurrent ladder step must terminate which occurs at rate S and there must be nofurther ones which occurs w.p. 1 - p. Thus r(x) = S(1 - p) = S -,3 so that the
conditional distribution of M given M > 0 is exponential with rate S -'3 and
0(u) = P(M > u) = P(M > 0)P(M > uIM > 0) = pe-(6-Mu.
0

64 CHAPTER III. THE COMPOUND POISSON MODEL
In VIII.3, we show that expression for /'(u) which are explicit (up to matrixexponentials) come out in a similar way also when B is phase-type. E.g. (Ex-ample VIII.3.2), if 3 = 3 and B is a mixture of two exponential distributionswith rates 3 and 7, and weights 1/2 for each, then
24 1V, (u) 35e-u + 35e-6u. (3.1)
For a heavy-tailed B, we use the Pollaczeck-Khinchine formula in Chapter IXto show that
b(u) -- 1 p pBo(u), u -+ oo. (3.2)
Notes and references Corollary 3.2 is one of the main classical early results inthe area. A variety of proofs are available . We mention in particular the following:(a) check that ip (u) = pe -(6-0)u is solution of the renewal equation (3.3) below; (b)use stopped martingales , cf. II.1.
3c Some classical analytical results
Recall the notation G+(u) = f^°° G+(dx).
Corollary 3.3 The ruin probability Vi(u) satisfies the defective renewal equation
ik (u) = 6+ (u) + G+ * 0(u) = Q f B(y) dy + fu
0(u - y)f3 (y) dy. (3.3)u 0
Equivalently , the survival probability Z(u) = 1 - i(u) satisfies the defectiverenewal equation
Z(u) = 1 - p + G+ * Z(u) = 1 - p + f u Z(u - y)/3B (y) dy. (3.4)0
Proof Write o (u) as
P(M>u) = P(S,+ >u,T+ <oo)+P(M> u,S,+ <u,T+ <oo).
Then the first term on the r.h.s. is ?7+ (u), and conditioning upon S,+ = y yields
P(M>u,S,+ <U, T+ <00)
zu P(M > u - y)G+(dy) = fU V(u - y)G+(dy)
For the last identity in (3.3), just insert the explicit form of G+. The case of(3.4) is similar (equivalently, (3.4) can be derived by elementary algebra from(3.3)). q

3. SPECIAL CASES OF POLLACZECK-KHINCHINE 65
Corollary 3.4 The Laplace transform of the ruin probability is
fo00
e-8uiP(u)du - 3 - /3B[-s] - Ps (3.5)s(,(3 - s - )3B[-s])
Proof We first find the m .g.f. Bo of B0 as
Bo[s] = fooc, eau B(u) du = f
0
m e8uB(du) = B[s] - 1 (3.6)
PB 3PB SPB
Hence00
Ee8M = (I - p) E p"Bo[s]" = 1 - p = (1 - p)s , (3.7)
n-o 1 - pBo[s] s +,3 - ,(3B[s]
e-8' (u)du =f ao
a-8uP (M > u)du = (1 - Ee-8M)0 o
1 (1+ (1 - p)s
s /3 - s - /3B[-s]
which is the same as (3.5).
Corollary 3.5 The first two moments of M are2
EM - PPB2) EM2 = PPB) + QZPBl (3.8)2(1 - P)pB' 3(1 - P)PB 2(1 - p)2
Proof This can be shown, for example, by analytical manipulations (L'Hospital's
rule) from (3.7). We omit the details (see, e.g., [APQ] pp. 206-207). 0
Notes and references Corollary 3.3 is standard , see e.g. [APQ] pp. 111-112 or
Feller [143]. The approach there is to condition upon the first claim occuring at time
t and having size x , which yields the survival probability as
00 f u }t
Z(u) = f f3e-Rtdt0
from which (3.4) can be derived by elementary but tedious manipulations. Of course,
it is not surprising that such arguments are more cumbersome since the ladder height
representation is not used.Also (3.7) and Corollary 3.5 can be found in virtually any queueing book. In fact,
either of these sets of formulas are what many authors call the Pollaczeck-Khinchine
formula.
In view of (3.5), numerical inversion of the Laplace transform is one of the classical
approaches for computing ruin probabilities. Some relevant references are Abate &
Whitt [2], Embrechts, Griibel & Pitts [132], Griibel [179] and Thorin & Wikstad [370]
(see also the Bibliographical Notes in [307] p. 191).

66 CHAPTER III. THE COMPOUND POISSON MODEL
3d Deterministic claims
Corollary 3.6 If B is degenerate at p, then
p) e-p(k -u/,u) [p(k - u/p)]k1:k-o k!
Proof By replacing {St} by {Stu/p} if necessary, we may assume p = 1 so that
the stated formula in terms of the survival probability Z(u) = 1 - z/'(u) takes
the formL^J [)3(k
Z(u) L. e-O('-u) - u)]kk!
k-0
The renewal equation (3.4) for Z(u) means
flhuZ(u) = 1-,3+ J Z(u-y),3I(0<y<1)dy
0
1-8+uu Z(y)/3I(0<u- y<1)dy
3 u-lhu
1-a+/3 J uZ(y)dy 0<u<10
U1-13+0 Z(y) dy 1 < u < oo
For 0 < u < 1, differentiation yields Z'(u) _ /3Z(u) which together with theboundary condition Z(0) = 1-/3 yields Z(u) _ (1-/3)eAu so that (3.9) follows for0 < u < 1. Assume (3.9) shown for n - 1 < u < n and let Z(u) denote the r.h.s.of (3.9). For n < u < n + 1, differentiation yields Z(u) _ /3Z(u) - /3Z(u - 1),
(u) e-R(k-u) [N(k - u)]kZ^ = d 1 _ a) ndu ( k!
(1 - a)Qea" + (1 - Q) 3e-Q (k-u) [O(k - u)]k
k=1 k!
1: e_O(k-u) NIN (k - u)]k-1(1 - L3)
n
- 1)!k=1
(k
u-1
= QZ(u) - )3(1 - Q) E e-0(k-u+1) [/3(k - u + 1 )]k
k=0 k!
= /32(u) - /32(u - 1).

4. CHANGE OF MEASURE VIA EXPONENTIAL FAMILIES 67
Since Z(n) = 2(n) by the induction hypothesis, it follows that Z(u) = 2(u) for
n<u<n+1. 0
Notes and references Corollary 3.6 is identical to the formula for the M/D/1waiting time distribution derived by Erlang [139]. See also Iversen & Staalhagen [208]for a discussion of computational aspects and further references.
4 Change of measure via exponential families
If X is a random variable with c.d.f. F and c.g.f.
00K(a) = logEe'X =
109feaxF(dx) = logF[a],
00
the standard definition of the exponential family {F9} generated by F is
FB(dx) = e°x-K(e)F(dx), (4.1)
or equivalently, in terms of the c.g.f. of F9,
co(a) = rc(a + 9) - r.(9). (4.2)
(Here 9 is any such number such that r.(9) is well-defined.)The adaptation of this construction to stochastic processes with stationary
independent increment as {St} has been carried out in 11.4, but will now berepeated for the sake of self-containedness. We could first tentatively considerthe claim surplus X = St for a single t, say t = 1: recall from Proposition1.1 that c(a) = /3(B[a] - 1) - a, and define rce by (4.2). The question thennaturally arises whether ie is the c.g.f. corresponding to a compound Poissonrisk process in the sense that for a suitable arrival intensity 00 and a suitableclaim size distribution BB we have
no(a) = rc(a + 9) - rc(9) = ,Qe(Bo[a] - 1) - a.
The answer is yes: inserting in (4.2) shows that the solution is
Ox
,3B = ,3B[9], B9(dx) = B[9] B(dx), or equivalently BB[a] = B[^+[O]0]. (4.4)
Repeating for t 54 1, we just have to multiply (4.3) by t, and thus (4.4) worksas well. Formalizing this for the purpose of studying the whole process {St}, we
set up

68 CHAPTER III. THE COMPOUND POISSON MODEL
Definition 4.1 Let P be the probability measure on D[0, oo) governing a givencompound Poisson risk process with arrival intensity,3 and claim size distribu-tion B, and define 09, BB by (4.4). Then FB denotes the probability measuregoverning the compound Poisson risk process with arrival intensity,0e and claimsize distribution Be; the corresponding expectation operator is E9.
The following result (Proposition 4.2, with T taking the role of n) is theanalogue of the expression
exp{8(x1 + • • • + xn) - nr.(9)} (4.5)
for the density of n i.i.d. replications from Fe (replace x by xi in (4.1) andmultiply from 1 to n).
Let FT = o(St : t < T) denote the o•-algebra spanned by the St, t < T, and
PBT) the restriction of PB to FT.
Proposition 4.2 For any fixed T, the PBT) are mutually equivalent on.FT, and
dP(T)
dP^T)= exp {BST - Tic(0)} . (4.6)
That is, for G E FT,
F(G) = Po (G) = EB [exp {-BST + Ttc(0)} ; G]. (4.7)
Proof We must prove that if Z is FT-measurable, then
EBZ = E [Ze9ST _T"(9)I . (4.8)
By standard measure theory, it suffices to consider the case where Z is mea-
surable w.r.t. .FTn) = Q(SkTIn : k = 0,1, . .. , n) for a given n. But let Xk =SkT/n - S(k_1)Tln. Then the Xk are i.i.d. with common c.g.f. Ti(a)/n, Z ismeasurable w.r.t. v(Xi, ... , Xn), and thus (4.8) follows by discrete exponentialfamily theory, in particular the expression (4.5) for the density. The identity(4.7) now follows by taking Z = e-BST+TK(e)I(G) q
Theorem 4 .3 Let T be any stopping time and let G E FT, G C {T < oo}. Then
P(G) = Fo(G) = EB [exp {-BST + TK(O)} ; G]. (4.9)
Proof We first note that for any fixed t,
Eee-BSt +tk(B) = 1. (4.10)

5. LUNDBERG CONJUGATION 69
Now assume first that G C Jr < T} for some deterministic T. Then G E FT,and hence (4.7) holds. Given FT, t = T -,r is deterministic. Thus by (4.10),
Ee [exp { -BST +Trc(9)} I(G) FT)] = 1,
so that
PG
= EeE0 [exp { -9ST+Trc(9)}I(G)I FT)]
= Ee [exp { -BST + rrrc(O)} I(G)EB [ exp {-9 (ST - ST) + (T - r)rc(9)}I .FT]]
= EB [exp { -BST + Trc(9)} I(G)] .
Now consider a general G. Then GT = G n Jr < T} satisfies GT E FT,
GT C_ Jr < T}. Thus, according to what has just been proved, (4.9) holds with
G replaced by GT. Letting T t oo and using monotone convergence then showsthat (4.9) holds for G as well. q
5 Lundberg conjugation
Being a c.g.f., c(a) is a convex function of a. The behaviour at zero is given bythe first order Taylor expansion
c(a) r. (0) + rc'(0)a = 0 + ES1 a = a(p - 1) _ -1 + a.77
Thus, subject to the basic assumption ij > 0 of a positive safety loading, thetypical shape of rc is as in Fig. 5.1(a).
(a) rc (a) (b) KL(a)
'Y -'Y
Figure 5.1
It is seen that typically) a ry > 0 satisfying
0 = r.(-Y) = 13(B['Y] - 1) - 7
1 Some discussion further supporting this statement is given in the next section.

70 CHAPTER III. THE COMPOUND POISSON MODEL
exists . Equation (5.1) is known as the Lundberg equation and plays a funda-mental role in risk theory ; an equivalent version illustrated in Fig. 5.2 is
B(7) = 1 + ^. (5.2)
7
Figure 5.2
s
As support for memory, we write FL instead of F7, ,QL instead of /37 and so onin the following . Note that
KL (a) = /L (BL [a] - 1) - a = i(a + 7), (5.3)
cf. Fig. 5.1(b). An established terminology is to call -y the adjustment coefficientbut there are various alternatives around, e.g. the Lundberg exponent.
Example 5 .1 Consider the case of exponential claims, b[s] = 5/(b - s). It isthen readily seen that the non-zero solution of (5.1) (or (5.2)) is 7 = 5-/3. ThusB[7] = 6/,3, and (4.4) yields /3L = b and that BL is again exponential with ratebL =,3. Thus, Lundberg conjugation corresponds to interchanging the rates ofthe interarrival times and the claim sizes. q
It is a crucial fact that when governed by FL, the claim surplus process haspositive drift
ELS1 = #L(0) > 0, (5.4)
cf. Fig . 5.1(b). Taking T = r(u), G = {T(u) < oo} in Theorem 4.3, we furthernote that (5.1) is precisely what is needed for one of the terms in the exponent

5. LUNDBERG CONJUGATION 71
to vanish so that Theorem 4.3 takes a particular simple form,
V) (u) = P(T(u) < oo) = EL [exp {-ryS,(u)} ; T(u) < oo] .
Letting e(u) = ST(u) - u be the overshoot and noting that PL(T(u) < oo) = 1
by (5.4), we can rewrite this as
0(u) = e-"ELe-7^(u). (5.5)
Theorem 5 .2 (LUNDBERG'S INEQUALITY) For all u > 0, V)(u) < e-7u.
Proof Just note that e(u) > 0 in (5.5). 0
Theorem 5 .3 (THE CRAMER-LUNDBERG APPROXIMATION) i'(u) - Ce-7u as
u -4 oo, where
C - 1-p - 1- P (5.6)-Y j o' xeryxOB (x) dx /3k [-Y] - 1
Proof By renewal theory , see A .1e, e(u) has a limit i;(oo) (in the sense of weakconvergence w.r.t. PL ) with density
1 - G+ L) (x) G+L) (x)
IL(+) µ+L)
where G+L) is the FL- ascending ladder height distribution and µ+L) its mean.
Since a-7' is continuous and bounded, we therefore have ELe-7t(u) -+ C where
C ELe-7 (00) = µ+) f e-7-(1 - G+L)(x)) dx
f 0ry^+L) J
00(1 - e-7x)G+(dx), (5.7)
0
and all that is needed to check is that (5.7) is the same as (5.6 ). To this end,
take first 0 = ry, T = T+, G = {S,+ E A} in Theorem 4.3. Then
P(ST+ E A) = EL [exp { -7S?+} ; ST+ E A] ,
which shows that
G(L) (dx) = e7xG+(dx) = e7x /3 (x) dx. (5.8)

72 CHAPTER III. THE COMPOUND POISSON MODEL
In principle, this solves the problem of evaluating (5.7), but some tedious (thoughelementary) calculations remain to bring the expressions on a final form. Noting
that SIG(L)II = 1 because of (5.4), we get
L 0000 (1 - e--")G+ (dx ) = 1 - J 3B(x) dx0
Using (5.8) yields
where
so that
(using (5.1)) and
= 1-p.
+L)
J xel'B (x) dx (5.10)0
VW = JIc* e° (x) dx = a (B[a] - 1) (5.11)
I 7B ['Y]-(B[7]-1) BI [7]-QVP (7) 72 7
7µ+L) = 'y/3 [7] 7 1/0 = /3B ['y] - 1 . (5.12)
Example 5 .4 Consider first the exponential case b(x) = Se-ax. Then 0(u) =pe-(a_Q)u where p = /3/S. From this it follows, of course, that 7 = S -,3 (thiswas found already in Example 5.1 above) and that C = p. A direct proof ofC = p is of course easy:
B ['y]
C
d S S S
d7S --y (S-7 )2 02'
1-p 1-p _ 1-p
/3B' [7] - 1 = - p.2 -1 P-1^7-
The accuracy of Lundberg's inequality in the exponential case thus depends onhow close p is to one, or equivalently of how close the safety loading 77 is tozero. q

5. LUNDBERG CONJUGATION
Remark 5.5 Noting that
PL - 1 = ,3LIBL - 1 = #ci (0) = k (ry) _ ,QB' ['Y] - 1 ,
73
we can rewrite the Cramer-Lundberg constant C in the nice symmetrical form
G, _'(0)1 - 1 - p
K'(7) PL-1(5.13)
In Chapter IV, we shall need the following result which follows by a variantof the calculations in the proof of Theorem 5.3:
Lemma 5 . 6 For a # ry, ELe-a^(°°) = 71 - aB[ry - a] - 1
aK'(7) 7 - a
Proof Replacing 7 by a in (5.7) and using (5.8), we obtain
1
ELe-a^*) = a(I 1 - ^ e('r-a)x,3 (x)dx)(L )\\\ f
using integration by parts as in (3.6) in the last step . Inserting (5.12), the resultfollows. q
Notes and references The results of this section are classical, with Lundberg'sinequality being given first in Lundberg [251] and the Cramer-Lundberg approximationin Cramer [91]. Therefore, extensions and generalizations are main topics in the areaof ruin probabilities, and in particular numerous such results can be found later in thisbook; in particular, see Sections IV.4, V.3, VI.3, VI.6.
The mathematical approach we have taken is less standard in risk theory (some ofthe classical ones can be found in the next subsection). The techniques are basicallystandard ones from sequential analysis, see for example Wald [376] and Siegmund [346].
5a Alternative proofs
For the sake of completeness, we shall here give some classical proofs, first oneof Lundberg's inequality which is slightly longer but maybe also slightly moreelementary:

74 CHAPTER III. THE COMPOUND POISSON MODEL
Alternative proof of Lundberg 's inequality Let X the value of {St} just after thefirst claim , F(x) = P(X < x). Then , since X is the independent differenceU - T between an interarrival time T and a claim U,
F'[7} = Ee7 ( U-T) = Ee7U • Ee-7T = B['Y] a = 1,3+ry '
where the last equality follows from c(ry) = 1. Let 0(n) (u) denote the proba-bility of ruin after at most n claims. Conditioning upon the value x of X andconsidering the cases x > u and x < u separately yields
,0(n+1) (u) = F(u) + J 0 (n) (u - x) F(dx).u
We claim that this implies /,(n) (u) < e-
7u, which completes the proof sinceVi(u) = limniw 1/J(n) (u). Indeed , this is obvious for n = 0 since 00)(u) = 0.Assuming it proved for n, we get
„/, (n+1)(u) <
00
< ue-7u f e7x F(dx) + f e-7(u-z) F(dx)u o0
= e-7uE['Y] = e-7u.
F(u) + J u e-7(u-=) F(dx)00
Of further proofs of Lundberg's inequality, we mention in particular themartingale approach, see II.1.
Next consider the Cramer-Lundberg approximation. Here the most standardproof is via the renewal equation in Corollary 3.3 (however, as will be seen, thecalculations needed to identify the constant C are precisely the same as above):
Alternative proof of the Cramer-Lundberg's approximation Recall from Corollary
3.3 that
Vi(u - x)/3 (x) dx.(u) = )3 J OO B(x) dx + JUu 0
Multiplying by e7u and letting
Z(u) = e7" -O(u), z(u) = e7u/ J B(x)dx, F(dx) = e7x,QB(x)dx,u
we can rewrite this as
f
0
u
1Z(u) = z(u) + J e7(u-x ),Y'•l•(u - x) • e7'/B(x) dx,
= z(u) + J u Z(u - x)F(dx),0

6. MORE ON THE ADJUSTMENT COEFFICIENT 75
i.e. Z = z+F*Z. Note that by (5.11) and the Lundberg equation, ry is preciselythe correct exponent which will ensure that F is a proper distribution (IIFII = 1).It is then a matter of routine to verify the conditions of the key renewal theorem(Proposition A1.1) to conclude that Z (u) has the limit C = f z(x)dx/µF, sothat it only remains to check that C reduces to the expression given above.
However , µF is immediately seen to be the same as a+ calculated in (5.10),whereas
L00
z(u) du = f"o
/3e7udu
J "o B(x) dx = J "o B(x)dx J y,0eluduu 0 0
J B(x)^ (e7x - 1) dx = ^' (B[7] - 1) - As]
[0 -µs] = l y P^
using the Lundberg equation and the calculations in (5.11). Easy calculus nowgives (5.6). q
6 Further topics related to the adjustment co-efficient
6a On the existence of y
In order that the adjustment coefficient y exists, it is of course necessary thatB is light-tailed in the sense of I.2a, i.e. that b[a] < oo for some a > 0. Thisexcludes heavy-tailed distributions like the log-normal or Pareto, but may inmany other cases not appear all that restrictive, and the following possibilitiesthen occur:
1. B[a] < oo for all a < oo.
2. There exists a* < oo such that b[a] < oo for all a < a* and b[a] = 00for all a > a*.
3. There exists a* < oo such that fl[a] < oo for all a < a* and b[a] = 00for all a > a*.
In particular , monotone convergence yields b[a] T oo as a T oo in case 1, andB[a] T oo as a f a* in case 2 (in exponential family theory , this is often referredto as the steep case). Thus the existence of y is automatic in cases 1 , 2; standardexamples are distributions with finite support or tail satisfying B(x) = o(e-ax)

76 CHAPTER III. THE COMPOUND POISSON MODEL
for all a in case 1, and phase-type or Gamma distributions in case 2. Case 3may be felt to be rather atypical, but some non-pathological examples exist, forexample the inverse Gaussian distribution (see Example 9.7 below for details). Incase 3, y exists provided B[a*] > 1+a*/,3 and not otherwise, that is, dependenton whether 0 is larger or smaller than the threshold value a*/(B[a*] - 1).
Notes and references Ruin probabilities in case 3 with y non-existent are stud-ied, e.g., by Borovkov [73] p. 132 and Embrechts & Veraverbeeke [136]. To the presentauthors mind, this is a somewhat special situation and therefore not treated in thisbook.
6b Bounds and approximations for 'y
2(1 - aps) 2µsProposition 6.1 ry <OMB PB)
Proof From U > 0 it follows that B[a] = Eea' > 1 + µsa + pB2)a2/2. Hence
1 = a(B[7] - 1) > Q (YPB +72µs)/2) = 3µs + OYµa2)2 (6.1)
7 'Y
from which the results immediately follows. q
The upper bound in Proposition 6.1 is also an approximation for small safetyloadings (heavy traffic, cf. Section 7c):
Proposition 6.2 Let B be fixed but assume that 0 = ,3(77) varies with the safety
loading such that 0 = 1 Then as 77 .0,µB(1 +rl)
2)-Y = -Y(77) 277
PB
Further, the Cramer-Lundberg constant satisfies C = C(r1) - 1.
Proof Since O(u) -+ 1 as r7 , 0, it follows from Lundberg's inequality that y -* 0.
Hence by Taylor expansion, the inequality in (6.1) is also an approximation sothat
OA-Y] - 1) N Q (711s + 72µB2) /2) = p + 3,,,(2)B'y 7 2
2(1 - p) _ 271µB
QPB PB)

6. MORE ON THE ADJUSTMENT COEFFICIENT 77
That C -4 1 easily follows from -y -4 0 and C = ELe-7V°O) (in the limit, b(oo)is distributed as the overshoot corresponding to q = 0 ). For an alternativeanalytic proof, note that
C - 1-P = rlµB73B' [7] - 1 B' [ry) - 1/0
711µB 77
µB +7µB2 ) - µB(1 +77 ) 7PBIPB - 77'l = 1.
277-q
13
Obviously, the approximation (6.2) is easier to calculate than -y itself. How-ever, it needs to be used with caution say in Lundberg's inequality or theCramer-Lundberg approximation, in particular when u is large.
6c A refinement of Lundberg 's inequality
The following result gives a sharpening of Lundberg 's inequality (because obvi-ously C+ < 1) as well as a supplementary lower bound:
Theorem 6 .3 C_e-ryu < ,)(u) < C+e-ryu where
= B(x) = B(x)C_ x>o f °° e7(Y-x)B(dy)' C+ xuo f 0 e'r(v-x)B(dy)
Proof Let H(dt, dx ) be the PL-distribution of the time -r(u) of ruin and thereserve u - S7(„)_ just before ruin . Given r(u) = t, u - ST (u)- = x, a claim
occurs at time t and has distribution BL(dy)/BL(x), y > x. Hence
ELe-7£(u) J H(dt, dx ) e--Y(Y- x)BL dy
0 o fX00 BL(x)
°o f°° B(dy)
f f H(dt, dx) x
L ^ H(dt, dx) f e7B(x)B(dy)oc,Jo
< C+ J o" J o" H(dt, dx) = C.0 0
The upper bound then follows from ik(u) = e-7uELe-Vu), and the proof of thelower bound is similar. q

78 CHAPTER III. THE COMPOUND POISSON MODEL
Example 6.4 If B(x) = e-ax, then an explicit calculation shows easily that
B(x) _ e-6X
fz ° e7(Y-x)B(dy) f x' e(6-,6)(Y-x)8e-sydy = 5 = P.
Hence C_ = C+ = p so that the bounds in Theorem 6.3 collapse and yield theexact expression pe-y" for O(u). q
The following concluding example illustrates a variety of the topics discussedabove (though from a general point of view the calculations are deceivinglysimple: typically, 7 and other quantities will have to be calculated numerically).
Example 6.5 Assume as for (3.1) that /3 = 3 and
b(x) = 2 .3e-3x + 2 .7e-7x,
and recall that the ruin probability is
5-su245e-u + 3e*(u) = 3
Since the dominant term is 24/35 • e-", it follows immediately that 7 = 1and C = 24/35 = 0.686 (also, bounding a-S" by a-" confirms Lundberg'sinequality). For a direct verification, note that the Lundberg equation is
7 = /3(B['Y]-1)= 3\2.337 +2.777-1
which after some elementary algebra leads to the cubic equation 273 - 1472 +127 = 0 with roots 0, 1, 6. Thus indeed 7 = 1 (6 is not in the domain ofconvergence of B[7] and therefore excluded). Further,
1-P = 181B = 1-3 2.3+2.71 =7'
[7] -B
1 3 1 7 I _
+-
17
'2 (3 -a )2 2 (7 - a)2 «=7=1 36
21-p _ 7 _ 24
QB[Y]-1 3.17-1 35*36
For Theorem 6.3, note that the function
f°°{L 3e_3x+ • 7e-7x 1 dxJ
f.0c, ex
-u I - . 3e-3x + 2 . 7e-7x l dxl 2 J
3 + 3e-4u
9/2 + 7/2e-4u

7. VARIOUS APPROXIMATIONS FOR THE RUIN PROBABILITY 79
attains its minimum C_ = 2/3 = 0.667 for u = oo and its maximum C+ =3/4 = 0.750 for u = 0, so that 0.667 < C < 0.750 in accordance with C = 0.686.
Notes and references Theorem 6.3 is from Taylor [360]. Closely related resultsare given in a queueing setting in Kingman [231], Ross [308] and Rossberg & Siegel
[309].
Some further references on variants and extensions of Lundberg's inequality are
Kaas & Govaaerts [217], Willmot [382], Dickson [114] and Kalashnikov [218], [220], all
of which also go into aspects of the heavy-tailed case.
7 Various approximations for the ruin probabil-ity
7a The Beekman-Bowers approximation
The idea is to write i (u) as F(M > u), fit a gamma distribution with parametersA, 6 to the distribution of M by matching the two first moments and use theapproximation
0(u)Sa
xa- le-ax dx.fu r(A)
According to Corollary 3.5, this means that A, 8 are given by A/S = a1, 2A/52 =a2
(2 )__ PPB
al 2(1 - P)PB
i.e. S = 2a1 /a2, A = 2a21/a2.
a2PIB3) ^ZP(B)2
3(1 - P)µ8 2(1 - p)2'+
Notes and references The approximation was introduced by Beekman [60], with
the present version suggested by Bowers in the discussion of [60].
7b De Vylder's approximation
Given a risk process with parameters ,(3, B, p = 1, the idea is to approximatethe ruin probability with the one for a different process with exponential claims,say with rate parameter S, arrival intensity a and premium rate p. In orderto make the processes look so much as possible alike, we make the first threecumulants match, which according to Proposition 1.1 means
2N (2) 6^= /3,4) .-p=AUB-1=P-1, =OP ,

80 CHAPTER III. THE COMPOUND POISSON MODEL
These three equations have solutions
3µa2) 9/3µB2)3 30µa2)2(3) ' 0 - (3)2 P - (3) P+PB 2µB 2µB
Letting /3* = /3/P, p* _ ,3* /S, the approximating risk process has ruin probabil-
ity z,b(u) = p*e- (b-A*)", cf. Proposition 1.1.3 and Corollary 3.1, and hence theruin probability approximation is
b(u) e-(b-Aln)u.
Notes and references The approximation (7.2) was suggested by De Vylder [109].
Though of course it is based upon purely empirical grounds, numerical evidence (e.g.
Grandell [171] pp. 19-24, [174]) shows that it may produce surprisingly good results.
7c The heavy traffic approximation
The term heavy traffic comes from queueing theory, but has an obvious inter-pretation also in risk theory: on the average, the premiums exceed only slightlythe expected claims. That is, heavy traffic conditions mean that the safety load-ing q is positive but small, or equivalently that /3 is only slightly smaller than
/3max = 1/µ8. Mathematically, we shall represent this situation with a limitwhere /3 T fl but B is fixed.
Proposition 7.1 As /3 f Nmax, (/3max - /3)M converges in distribution to the2a
exponential distribution with rate S = B'
Proof Note first that 1 - p = (/3max -0)µB. Letting Bo be the stationary excesslife distribution, we have according to the Pollaczeck-Khinchine formula in theform (3.7) that
Ee$(Amex -/j)M
_ 1-p _ 1-p
1 - PBo [s (/3max - /3)] 1 - p + p { 1 - Eo [s (0max - ,3 )1 }1-p _ 1-p
ti 1 - P - Ps(/3max - )3)PBo 1 - p - s(/3max - /3)PBo
µBPB - 8µBo - S-s'
where 6 = µB/µBo = 2µa/µB q2)

7. VARIOUS APPROXIMATIONS FOR THE RUIN PROBABILITY 81
Corollary 7.2 If ,Q T /3max, u -* oo in such a way that (3max - /3)u -* v, then
P(u) -4 e-6„
Proof Write z'(u) as P((/3max - l3)M > (/3max - /3)u).
These results suggest the approximation
Vi(u) e-6(0_.--0)u.
It is worth noting that this is essentially the same as the approximation
(2)z/i(u) Ce- ryu ;ze a-2unµB laB (7.4)
suggested by the Cramer-Lundberg approximation and Proposition 6.2. Thisfollows since rl = 1/p - 1 1 - p, and hence
6()3max _'3) =2µ2B 1 - p _ 2rl11BPB p,B AB )
However , obviously Corollary 7. 2 provides the better mathematical foundation.
Notes and references Heavy traffic limit theory for queues goes back to Kingman[230]. The present situation of Poisson arrivals is somewhat more elementary to dealwith than the renewal case (see e .g. [APQ] Ch. VIII). We return to heavy traffic froma different point of view (diffusion approximations) in Chapter IV and give further
references there . In the setting of risk theory, the first results of heavy traffic typeseem to be due to Hadwiger [184].
Numerical evidence shows that the fit of (7.3) is reasonable for g being say 10-20%
and u being small or moderate, while the approximation may be far off for large u.
7d The light traffic approximation
As for heavy traffic , the term light traffic comes from queueing theory , but hasan obvious interpretation also in risk theory: on the average , the premiums aremuch larger than the expected claims . That is , light traffic conditions meanthat the safety loading rl is positive and large , or equivalently that 0 is smallcompared to µB . Mathematically, we shall represent this situation with a limitwhere 3 10 but B is fixed.
Of course , in risk theory heavy traffic is most often argued to be the typi-cal case rather than light traffic . However , light traffic is of some interest as acomplement to heavy traffic , as well as it is needed for the interpolation approx-imation to be studied in the next subsection.

82 CHAPTER III. THE COMPOUND POISSON MODEL
Proposition 7.3 As ,(3 10,
0(u) /3 J B(x)dx = /3E[U - u; U > u] = /3iE(U - u)+. (7.5)u
Proof According to the Pollaczeck-Khinchine formula,
ao 00
(u) P) anllBBon(U) onPaBon(u) •n=1 n=1
Asymptotically, En'=2 • • • = O(/32) so that only the first terms matters, and
hence00
(10(U) /3pBBo (u) = 0 / B(x)dx.u
The alternative expressions in (7.5) follow by integration by parts. q
Note that heuristically the light traffic approximation in Proposition 7.3 isthe same which comes out by saying that basically ruin can only occur at thetime T of the first claim , i.e. z/' (u) F(U - T > u). Indeed , by monotoneconvergence
P(U - T > u) = J o" B(x + u)/3e-ax dx , ( 3 J O B dx.0 u
Notes and references Light traffic limit theory for queues was initiated by Bloom-
field & Cox [69]. For a more comprehensive treatment, see Daley & Rolski [96], [97],
Asmussen [19] and references there. Again, the Poisson case is much easier than the re-
newal case . Another way to understand that the present analysis is much simpler than
in these references is the fact that in the queueing setting light traffic theory is much
easier for virtual waiting times (the probability of the conditioning event {M > 0} is
explicit) than for actual waiting times , cf. Sigman [347]. Light traffic does not appear
to have been studied in risk theory.
7e Interpolating between light and heavy traffic
We shall now outline an idea of how the heavy and light traffic approximationscan be combined. The crude idea of interpolating between light and heavy trafficleads to
0 (u) C1 - Q limIP (u) + Q lim z/'(u)Amax &0 amax ATAm.=
a 1 a1- J 0+ 1 = = p,Omax max m.

8. COMPARISONS OF CLAIM SIZE DISTRIBUTIONS 83
which is clearly useless . Instead, to get non-degenerate limits , we combine with
our explicit knowledge of ip(u) for the exponential claim size distribution E
whith the same mean PB as the given one B, that is, with rate 1/µB = /3max.
Let OLT) (u) denote the light traffic approximation given by Proposition 7.3
and use similar notation for -%(B) (u) = (u), z/i(E) (u) = pe-(Qmax-Q)u, _(E) (u),
HT) (u'), ^IE)(U). Substituting v = u(,3n, -,3), we see that the following limits
exist:
1 (B)Qmsx-Q J
hmHT
Q1Qm.x ,VHT) ( axQm-Q )
^(B)h ( .
max-Q
m"^
LT Q
(Qlo V LT) Qmax-Q
e-6"= e(1 -6)"
= CHT(v) (say),2µE/µE2)'"e
amaze" J B(x) dx = cLT(v ) (say),"/Qmex
f/00 -
Qmax B(x)dx
4/
00Qmax
e-Qmaxxdx
and the approximation we suggest is
Cu) ,O(E)(u) 1 (1 - O0 CLT(u ( /3max -0) + O16 CHT(U(Qmaz - /3))M. ) M.
- Wmaxf(x ) dx + pee6mQ. (7.6)Al(1-p)
The particular features of this approximation is that it is exact for the expo-nential distribution and asymptotically correct both in light and heavy traffic.Thus , even if the safety loading is not very small, one may hope that somecorrection of the heavy traffic approximation has been obtained.
Notes and references In the queueing setting , the idea of interpolating between
light and heavy traffic is due to Burman & Smith [83 ], [84]. Another main queueing
paper is Whitt [380], where further references can be found . The adaptation to risk
theory is new; no empirical study of the fit of (7.6) is , however, available.
8 Comparing the risks of different claim size dis-tributions
Given two claim size distributions B(1), B(2), we may ask which one carries thelarger risk in the sense of larger values of the ruin probability V(') (u) for a fixedvalue of 0.

84 CHAPTER III. THE COMPOUND POISSON MODEL
To this end, we shall need various ordering properties of distributions, formore detail and background on which we refer to Stoyan [352] or Shaked &Shantikumar [337].
Recall that B(') is said to be stochastically smaller than B(2) (in symbols,
B(') <d B(2)) if B(1)(x) < B(2)(x) for all x; equivalent characterizations aref f dB(') < f f dB (2) for any non-decreasing function f, or the existence of ran-dom variables U(l), U(2) such that U(l) has distribution B('), U(2) distributionB(2) and U(1) < U(2) a.s.
A weaker concept is increasing convex ordering: B(1) is said to be smallerthan B(2) (in symbols, B(') <i, B(2)) in the increasing convex order if
f BM (y) dy < f 00 Bi2i (y) dyx x
for all x; an equivalent characterization is f f dB(') < f f dB (2) for any non-decreasing convex function f. In the literature on risk theory, most often theterm stop-loss ordering is used instead of increasing convex ordering becausefor a given distribution B, one can interpret f x°° B(y) dy as the net stop-losspremium in a stop-loss or excess-of-loss reinsurance arrangement with retentionlimit x, cf. XI.6.
Finally, we have the convex ordering. Bill is said to be convexly smallerthan B(2) (in symbols, B(' <, B(2)) if f fdB(1) < f fdB(2) for any convexfunction f. Rather than measuring difference in size, this ordering measuresdifference in variability. In particular (consider the convex functions x and -x)the definition implies that B(1) and B(2) must have the same mean, whereas(consider x2) B(2) has the larger variance.
Proposition 8.1 If B(') <d B(2), then ,ill(u) < V)(2) (U) for all u.
Proof According to the above characterization of stochastical ordering, we can
assume thatSt
1) < St2l for all t. In terms of the time to ruin, this impliesT(l)(u) > r(2)(u) for all u so that 17-(I) (U) < oo} C_ {T(2)(u) < oo}. Takingprobabilities, the proof is complete. q
Of course, Proposition 8.1 is quite weak, and a particular deficit is that wecannot compare the risks of claim size distributions with the same mean: ifBM <d B(2) and µB«) = /IB(2), then Bill = B(2). Here convex ordering isuseful:
Proposition 8.2 If B(') <j, B(2) and PB(1) = µB(2), then i.' 1)(u) < V)(2) (U)
for all u.

8. COMPARISONS OF CLAIM SIZE DISTRIBUTIONS 85
Proof Since the means are equal, say to p, we have
Bol) (x) f ' B(1) (y) dy < -' f' B(2) (y) dy = Bo2) (x)•µ
I.e., Bo1) <_d Bo2) which implies the same order relation for all convolutionpowers. Hence by the Pollaczeck-Khinchine formula
00 =,,(1) (,u) = (1 _ P) E /3npnBo( 1):n(u) < (1- p) E /3"µ"Bo2)*
n(u) _ V(2) (u)n=1 n=1
Corollary 8.3 If B(1) <, B(2), then /'(')(u) < 0(2)(u) for all u.
A general picture that emerges from these results and numerical studies likein Example 8.6 below is that (in a rough formulation) increased variation in Bincreases the risk (assuming that we fix the mean). The problem is to specifywhat 'variation' means. A first attempt would of course be to identify 'variation'with variance. The heavy traffic approximation (7.4) certainly supports thisview: noting that, with fixed mean, larger variance is paramount to larger secondmoment, it is seen that asymptotically in heavy traffic larger claim size varianceleads to larger ruin probabilities. Corollary 8.3 provides another instance ofthis, and here is one more result of the same flavor:
Corollary 8.4 Let D refer to the distribution degenerate at 'LB . Then V, (D) (u)< O(B) (U) for all u.
Proof If f is convex , we have by Jensen 's inequality that E f (U) > f (EU). Thisimplies that D <, B, from which the result immediately follows. q
A partial converse to Proposition 8.2 is the following:
Proposition 8.5 If '0(1)(u) < p(2) (U) for all u and a, then B(1) <, B(2).
Proof Consider the light traffic approximation in Proposition 7.1. q
We finally give a numerical example illustrating how differences in the claimsize distribution B may lead to very different ruin probabilities even if we fixthe mean p = PB.
Example 8.6 Fix /3 at 1/1.1 and µB at 1 so that the safety loading 11 is 10%,and consider the following claim size distributions:
B1: the standard exponential distribution with density a-y;

86 CHAPTER III. THE COMPOUND POISSON MODEL
B2: the hyperexponential distribution with density 0.lA,e-'\1x + 0.9A2e-'2r
where A, = 0.1358, A2 = 3.4142;
B3: the Erlang distribution with density 4xe-2x;
B4: the Pareto distribution with density 3/(1 + 2x)5/2.
Let ua denote the a fractile of the ruin function, i.e. 1/)(u,,) = a, and consider
a = 5%, 1%, 0.1%, 0.01%. One then obtains the following table:
B, B2 B3 B4
U005 32 181 24 35
U0.0' 50 282 37 70U0.001 75 425 56 245u0.000, 100 568 74 1100
(the table was produced using simulation and the numbers are therefore subjectto statistical uncertainty). Note to make the figures comparable, all distributionshave mean 1. In terms of variances o2, we have
0r3 = 2 < or2 = 1 < 02 = 10 < 04 = 00
so that in this sense B4 is the most variable. However, in comparison to B2the effect on the ua does not show before a = 0.01%, which appears to besmaller than the range of interest in insurance risk (certainly not in queueingapplications!), and this is presumably a consequence of a heavier tail ratherthan larger variance. For B1i B2, B3 the comparison is as expected from theintutition concerning the variability of these distributions, with the hyperexpo-nential distribution being more variable than the exponential distribution andthe Erlang distribution less. 11
Notes and references Further relevant references are Goovaerts et al. [166],
van Heerwarden [189], Kluppelberg [234], Pellerey [287] and (for the convex ordering)
Makowski [252]. We return to ordering of ruin probabilities in a special problem in
VI.4.
9 Sensitivity estimates
In a broad setting, sensitivity analysis (or pertubation analysis) deals with thecalculation of the derivative (the gradient in higher dimensions) of a performance
measure s(O) of a stochastic or deterministic system, the behaviour of whichis governed by a parameter 9. A standard example from queueing theory is

9. SENSITIVITY ESTIMATES 87
a queueing network, with 0 the vector of service rates at different nodes androuting probabilities, and s(9) the expected sojourn time of a customer in thenetwork. In the present setting, s(9) is of course the ruin probability t' = Vi(u)(with u fixed) and 0 a set of parameters determining the arrival rate 0, thepremium rate p and the claim size distribution B. For example, we may beinterested in a'/ap for assesing the effects of a small change in the premium,or we may be interested in aV)/0/3 as a measure of the uncertainty on '0 if 0 isonly approximatively known, say estimated from data.
Example 9.1 Consider the case of claims which are exponential with rate 8(the premium rate is one). Then ib = Pe-(6-13)u, and hence
a _ e-(6-0)u + u e-(6-0)u = ( -i- +
which is of the order of magnitude uV,(u) for large u.
Assume for example that 8 is known, while /3 = j3 is an estimate, obtainedsay in the natural way as the empirical arrival rate Nt/t in [0, t]. Then if tis large, the distribution of %3 -0 is approximatively normal N(0„ Q/t). Thus,
if = a e-(6-A)u, it follows that -' is approximatively normal N(0, a2/t),where
l2Q2 = fl ( 1113 /
_ Ou2v)2.
In particular , the standard deviation on the normalized estimate ^/1' (the rel-ative error ) is approximatively ,01/2u, i.e. increasing in u. Similar conclusionswill be found below. q
Proposition 9.2 Consider a risk process {Rt} with a general premium rate p.Then
ao = 00ap
-Qa/,
where the partial derivatives are evaluated at p = 1.
Proof This is an easy time transformation argument in a similar way as in
Proposition 1.1.3. Let R(P) = Rtli,. Then the arrival rate /3(P) for { R(P) }
is )31p, and hence the effect of changing p from 1 to 1 + Ap corresponds tochanging /3 to /3/(1 + Op) /3(1 - Ap). Thus at p = 1,
a0-
as ao- -
8019P 19P a/ a/3
0

88 CHAPTER III. THE COMPOUND POISSON MODEL
As a consequence, it suffices to fix the premium at p = 1 and consider onlythe effects of changing ,3 or/and B. In the case of the claim size distributionB, various parametric families of claim size distributions could be considered,but we shall concentrate on a special structure covering a number of importantcases, namely that of a two-parameter exponential family of the form
Bo,((dx ) = exp {Ox + (t(x) - w(O , ()} p(dx) , x > 0 (9.2)
(see Remark 9.6 below for some discussion of this assumption).Consider first the adjustment coefficient y as function of 3, 9, (, and write
-yp = 8-y/8/3 and so on . Similar notation for partial derivatived are used below,e.g. for the ruin probabilities ,0 = t/'(u) and the Cramer-Lundberg constant C.
Proposition 9.3
=
7 (9 3)70'
./3(1- we(e +'y,()(0 +'0)
='(Q+'Y)[we(0+7,O-we (9,^)] 4)9Ye 1-(/3+y)we(9+'y,
( .
=(3+'y)PC (0+7,()-wC(e,()^ (9 5)
1 - (/3 + y)we(9 + 7, ().
Proof According to (9.10) below, we can rewrite the Lundberg equation as w(9+-y, ^) - w(6, () = log(1 + -y//3). Differentiating w.r.t. /3 yields
we(e + Y,()YC = 1 +y//3 \ Q2
From this (9.3) follows by straightforward algebra, and the proofs of (9.4), (9.5)are similar. q
Now consider the ruin probability 0 = 0 (u) itself. Of course , we cannotexpect in general to find explicit expressions like in Example 9.1 or Proposition9.3, but must look for approximations for the sensitivities 0,3, Viei '0(. Themost intuitive approach is to rely on the accuracy of the Cramer-Lundbergapproximation , so that heuristically we obtain
'00 50-ryu = Coe-"u - u-ypCe-7u -urypO. (9.6)
As will be seen below, this intuition is indeed correct. However , mathematicallya proof is needed basically to show that two limits (u -* oo and the differentia-tion as limit of finite differences ) are interchangeable.
Consider first the case of 8/8/3:

9. SENSITIVITY ESTIMATES 89
Proposition 9.4 As u oo, it holds that
a -ryu 7C2ue
a/3 Q(1 P)
Proof We shall use the renewal equation (3.3) for z/'(u),
0(u - x),3(x) dx. (9.8)0(u) = /3 J "O B(x) dx+ fu
Letting cp = e0/e/3 and differentiating (9.8), we get
W(u - x),QB(x) dx.O(u - x)B(x) dx + J Up(u) = J "O B(x) dx + J Uu 0 0
Proceeding in a similar way as in the proof of the Cramer-Lundberg approxima-tion based upon (9.8) (Section 5), we multiply by e7" and let Z(u) = elt" cp(u),F(dx) = e'yy/3B(x)dx,
Z= zl + z2 where zl (u) = e7u J m B(x)dx, z2(U) = e7" J u b(u - x)B(x)dx.u 0
Then Z = z + F * Z and F is a proper probability distribution . By dominatedconvergence,
z2(u) _ 1 u e'ri`i7i(u - x) F(dx) --f J C F(dx) = C
as u -4 oo, and alsoo zl(u) -+ 0 because of B['y] < oo. Hence by a variant ofthe key renewal theorem (Proposition A1.2 of the Appendix ), Z(u)/u -a C//3PFwhere PF is the mean of F. But from the proof of Theorem 5.3 (see in particular(5.12)), PF = (1 - p)/C'y. Combining these estimates , the proof is complete.11
For the following , we note the formulas
Ee,St (U) = wS(O,C ), (9.9)Ee,(e"U = Be,([a] = exp {w(9 + a, () - w(O, ()} , (9.10)
Ee,4t (U)e°`U = w((9 + a, () exp {w(9 + a, () - w(9, O} (9.11)
which are well-known and easy to show (see e.g. Barndorff-Nielsen [58]). Furtherwrite
de = [we (9 +'y, () - we(9 , ()] exp {w (O + -y, () - w(9, ()}

90 CHAPTER III. THE COMPOUND POISSON MODEL
[we(e+7, 01 (i+)
do = +'Y, ^) - w(0, ^)}
[wc (0 + 7, C) - we (0, C)] (1 + 7 )
Proposition 9.5 Assume that (9.2) holds. Then as u -> oo,
07P N ue-7u (3Czde , 8^ ue-7u,6C
2 do(9.12)
89 1-p 8( 1-p
Proof By straightforward differentiation,
8 8() 8(f exp {Oy + (t(y) - w (9, ()} 1z(dy)
= f [t(y) - wc (O, )}B(dy)•
Letting cp it thus follows from (9.8) that
TV(ucp(u) = e-7uzl(u) + e-7°zz(u) + - x),lB(x) dx
where
zl (u) = ,6e7u f "o f[t(y) - w(e, ()]B(dy) dx,u
Z2(U) = e7° f u ^/i(u - x)f3 f ^[t(y) - wc(O, ())B(dy) dx.0 x
Multiplying by e7" and letting
Z(u) = e"uV(u), z = zl + z2, F(dx) = e7x,QB(x)dx,
this implies Z = z + F * Z. By dominated convergence and (9.9)-(9.11),
z2 (u) foo
C - e7x/3 f 00 [t(y) - w( (0, ()]B(dy) dx0 x
- wc(9, ()]--(e7v - 1) B(dy)0C T ONO
'f '[t(y) - w( (0, ()]e7vB(dy)
'fCd
c7

9. SENSITIVITY ESTIMATES 91
as u -3 oo, and also zj (u) -4 0 because of
fo c'o e11(t (y) - w((9, ())B(dy) < oo.
Hence,Z(u) /3C
U 7µF
from which the second assertion of (9.12) follows, and the proof of the first oneis similar. q
Example 9.6 Consider the gamma density
b (x )= Sa xa-1e-dz =
r(a)
Here (9.2) holds with
exp {-Sx + a log x - (log r(a) -a log S)} •1
1.
p(dx) = x-ldx, 9 = -S, < = a, t(x) = logx,
w(e, () = log r(a) - a log S = log r(c) - C log(-9).
We get w( (0, () ='I'(t;) -log(-9) = %F(a) -logs where %1 = F'/]F is the Digammafunction, we (9, () = -C/9 = a/S. It follows after some elementary calculus thatp = a)3/5 and, by inserting in the above formulas, that
C = a 1 - pa+1 , (9.13)
de =
a,QS /(S - ry) - 15a-1
cry (5 - ,Y)a+1 ' (9.14)
\ (d( log (\5a_ / \SSry ) '
(9.15)
7!3
76 = -7e =
72 - Srya/32 + a/37 + /37 - /35'
a/i'y + aryl62-5ry- a/35-a&y'
(05 + 57 _'3_y - rye) S5-ry-a,3-ary tog(-
'y)-Finally, (9.12) takes the form
alp au-
,yu/3C2do az/) = 8z/, ,,, ue-_Yu 'C2d(86 89 1-p' 8a 8( 1 -p
(9.16)
(9.17)
(9.18)

92 CHAPTER III. THE COMPOUND POISSON MODEL
Example 9.7 Consider the inverse Gaussian density
(b(x)
Zx37 exp
This has the form (9.2) with
µ(dx) = 2x3zrdx, 9 = - 22, C = - 2 , t(x) _ -,
w(e, () = -Cc - log c = -2 (-9) (-() - 2 -log(-0- 21og 2.
In particular, for a < a* = z
Be,S[a] = exp {w (9 + a, C) - w(9, ()} = exp {c (C - "62 - 2a) }
Thus the condition B[a*] > 1 + a* /,l3 of Section 6a needed for the existence ofry becomes e^Q > 1+62 /2,3. Straightforward but tedious calculations , which weomit in part , further yield
,3Ee,([Y] - 1 = eXP {c(C - CZ -try)} 1C C2 -try - 1
16 +ry
c C2-2ry
We (e, C) = B2( = +
70
-Yc =
de =
do =
=

10. ESTIMATION OF THE ADJUSTMENT COEFFICIENT 93
Finally, (9.12) takes the form
a = a-S
t1lEY
_u ,3C2de
ar; ae 1-p'a = -c - -cue_7u)3C
z
P
Remark 9.8 The specific form of (9.2) is motivated as follows. In general,the exponent of the density in an exponential family has the form 01 tl (x) +
• • • + 9ktk (x). Thus, we have assumed k = 2 and ti (x) = x. That it is no
restriction to assume one of the ti(x) to be linear follows since the whole set-uprequires exponential moments to be finite (thus we can always extend the family
if necessary by adding a term Ox). That it is no restriction to assume k < 2
follows since if k > 2, we can just fix k - 2 of the parameters. Finally if k = 1,
the exponent is either Ox, in which case we can just let t(x) = 0, or Ct(x), in
which case the extension just described applies. q
Notes and references The general area of sensitivity analysis (gradient estima-
tion) is currently receiving considerable interest in queueing theory. However, themodels there (e.g. queueing networks) are typically much more complicated than theone considered here, and hence explicit or asymptotic estimates are in general notpossible. Thus, the main tool is simulation, for which we refer to X.7 and references
there.Comparatively less work seems to have been done in risk theory; thus, to our
knowledge, the results presented here are new. Van Wouve et al. [379] consider a
special problem related to reinsurance.
10 Estimation of the adjustment coefficient
We consider a non-parametric set-up where /3, B are assumed to be completelyunknown, and we estimate -y by means of the empirical solution ryT to theLundberg equation. To this end, let
NT
16T = ^T , BT [a]= NT ^` e"U;, kT (a) = /T (BT [a] - 1) - a,
sj=1
and let -YT be defined by IKT('ryT) = 0.
Note that if NT = 0, then BT and hence ryT is undefined. Also, if
1PT = /3TNT(U1+...+UNT) > 1,
then ryT < 0. However , by the LLN both F (NT = 0) and F (PT > 1) converge
to 0 as T -- oo.

94 CHAPTER III. THE COMPOUND POISSON MODEL
Theorem 10 .1 As T -4 oo, 7Ta4' 7.
If furthermore B[27] < oo, then
'YT - 'Y ,: N 0, a2T y ,
where a2 = /3r.(27)/K'(7)2.
For the proof, we need a lemma.
Lemma 10 .2 As T -* oo,
r-T(7) N
Proof Since
Var(eryU) =
we have
B[7], B[27] - B[7]2n
(10.1)
(10.2)
(10.3)
Hence ( 10.2) follows from NT/T a4' ,Q and Anscombe 's theorem. More generally,since NT /T ,: N ()3,,3/T), it is easy to see that we can write
16T l _ ,a 1 \ V1
BT[7] I B[7] I + , ,/^ B[27] - B[7]2 V2 ,
where V1, V2 are independent N (0, 1) r.v.'s. Hence
KT(7) = (F' + (OT - 0))((BT [7] - B[7]) + B [7] - 1) - If
a(B[7l - 1) - 7 + (,3T - i3)(B[7] -1) + (3(BT[7] - B[7])
0+ Iv/o-(b[-y]-,)vl+ vfo-VFB[2-y]- b[-Yp'V21
N CO, T { (E[7] - 1)2 + E[27] - B[7]2 })
N (n[7], B[2'Y] - B [7]2,/3T )
N (0 ,
( T 0

10. ESTIMATION OF THE ADJUSTMENT COEFFICIENT 95
which is the same as (10.3). q
Proof of Theorem 10.1 By the law of large numbers,
OT a4 /3, BT[a] -3 B[a],
Let 0 < E < ry. Then
lcT(a) 4 /c(a).
r.(ry - e) < 0 < r.(ry + e)
and hence
KT(7 - E) < 0 < kT(7 + E)
for all sufficiently large T . I.e., 7T E (-y - e, -y + E) eventually, and the truth of
this for all e > 0 implies ryT a-t 'y.Now write
KT(7T) - kT(7) = 4T(7T)(7T -7), (10.4)
where ryT is some point between ryT and ry. If ryT E (7 - 6"Y + E), we have
KT(7 - E) < 4T(7T) < 4T(7 + E).
By the law of large numbers,
NT
BT [a] = 1 E Uie°U' a$' EUe"u = B'[a].NT i=1
Hence r.'T(a) n'(a) for all a so that for all sufficiently large T
K7 - E) < 4T(7T) < (7 +0'
which implies 'T(ry4) a$' r.'(-y).Combining ( 10.4) and Lemma 10.2, it follows that
7T-7KT(7T) - KT(7) kT(7)
K'(7) ,c'(7)
N (0' T (2(7) / N (0, °7IT).
Theorem 10.1 can be used to obtain error bounds on the ruin probabilitieswhen the parameters ,Q, 0 are estimated from data . To this end , first note that
e-7TU N (e-7U u2e-27Uo'2/T)7

96 CHAPTER III. THE COMPOUND POISSON MODEL
Thus an asymptotic upper a confidence bound for a-7' (and hence by Lund-berg 's inequality for 0(u)) is
e-"TU + f- ue-ryuU";TVIT
where r7ry.T = 3TKT (21T)IKT (^T)2 is the empirical estimate of vy and fc,
satisfies b(- f,,) = a (e.g., ft, = 1.96 if a = 2.5%).
Notes and references Theorem 10.1 is from Grandell [170]. A major restrictionof the approach is the condition B[2ry] < oo which may be quite restrictive. Forexample , if B is exponential with rate 8 so that ry = 8 -,Q, it means 2 (8 -,0) < 5,i.e. 6 < 2 ,3 or equivalently p > 1/2 or 11 < 100%. For this reason , various alternativeshave been developed . One (see Schmidli [321]) is to let {Vt} be the workload processof an M /G/1 queue with the same arrival epochs as the risk process and service timesU1, U2,..., i .e. Vt = St - info< „< t S,,. Letting
Wo = 0, wn = inf{t > W.-1 : Vt = 0, V. > 0 for some t E [Wn_ 1, t]},
the nth busy cycle is then [Wn-1, Wn), and the known fact that the
Y„ = max VttE[W„-1,Wn)
are i .i.d. with a tail of the form P(Y > y) - C1e-"a ( see e .g. Asmussen [23]) canthen be used to produce an estimate of ry. This approach in fact applies also for manymodels more general than the compound Poisson one.
Further work on estimation of -y with different methods can be found in Csorgo &Steinebach [94], Csorgo & Teugels [95], Deheuvels & Steinebach [102], Embrechts &Mikosch [133], Herkenrath [192], Hipp [196], [197], Frees [146], Mammitzsch [253] andPitts , Griibel & Embrechts [292].

Chapter IV
The probability of ruinwithin finite time
This chapter is concerned with the finite time ruin probabilities
0(u, T) = P( /r(u) <T) \
= PI inf Rt <OIRo=u1/\0<t<T
PI sup St>ul0<t<T
Only the compound Poisson case is treated; generalizations to other models are
either discussed in the Notes and References or in relevant chapters.
The notation is essentially as in Chapter III. In particular, the premium
rate is 1, the Poisson intensity is 0 and the claim size distribution is B with
m.g.f. B[•] and mean AB. The safety loading is q = 1/p - 1 where p = 13µB.
Unless otherwise stated, it is assumed that i > 0 and that the adjustmentcoefficient (Lundberg exponent) -y, defined as solution of c(ry) = 0 where ic(s) _
/3(B[s] - 1) - s, exists. Further let 'Yo be the unique point in (0, 'y) where c(a)
attains it minimum value. See Fig. 0.1 (the role of ryy will be explained in Section
4b).
97

98 CHAPTER IV. PROBABILITY OF RUIN IN FINITE TIME
Figure 0.1
The claims surplus is {St}, the time of ruin is T(u) and ^(u) = ST(t&) - u is theovershoot.
1 Exponential claims
Proposition 1.1 In the compound Poisson model with exponential claims withrate S and safety loading 77 > 0, the conditional mean and variance of the timeto ruin are given by
/3u+1E[-r(u) I T (u) < oo] (1.1)
J -)32/3Su+/3+S_
Var [T (u) I T(u) < oo] (1.2)(S-)3)3
Proof Let as in Example 111.5 . 1 FL, EL refer to the exponentially tilted process=with arrival intensity S and exponential claims with rate /3 (thus , PL = 6/0
1/p > 1). By the likelihood identity III.(4.9), we have for k = 1, 2 that
E [T(u)k; 7- (U) < 00] = ELT(u)ke-'YS.(,.) = e-7u ELe-'Y^(u) ELT(U)k
= e-'Yu b ELT(u)k = O(u)ELT(u)k,
using that the overshoot l; (u) is exponential with rate 0 w.r.t. FL and indepen-dent of T(u). In particular,
E[T(u) I T(u) < 00 ] = ELT (U), Var[T(u) I T(u) < 00] = VarL T(U) .

1. EXPONENTIAL CLAIMS
For (1 . 1), we have by Wald's identity that (note that ELSt = t(pL - 1))
ELST(u)
ELT(u)
(PL - 1)ELT(u),
u + ELe(u) _ u + 1 //3=
/3u + 1
PL - 1 6/0-1 6-/3
For (1.2), Wald's second moment identity yields
EL (Sr(u) - (PL - 1)T(u))2 = UL2
whereQL
= s;"(ry) = 26//32. Since Sr (u) and (PL - 1)T(u) are independent withthe same mean , the 1.h.s. is
V1rLSr(u) +VarL ((PL - 1)T(u)) = VarLe(u) + (PL - 1)2VarLT(u)
Thus the l.h.s. of (1.2) is
aLELT(u) - 1//32
(6/)3 -1)2
+ 1I12 VarLT(u).2 Ca -
26(/3u + 1)/(6 - /3) - 1(6-)3)2
which is the same as the r.h.s. 0
Proposition 1.2 In the compound Poisson model with exponential claims withrate 6 and safety loading rl > 0, the Laplace transform of the time to ruin isgiven by
Ee-a7(u) = E [e-aT (u). T(u) < oo] = e-Bu I 1 - I (1.3)
fora > r.(-yo) = 2V - /3 - 6, where
B = 0(a) =+ (6-/3-a)2+4a6
2
Proof It is readily checked that yo = 6 - V/ and hence that the value of ic(yo)is as asserted.
Let 0 > -yo be determined by ►c(0) = a. This means that /3(6/(6 - 0) - 1) - B= a, which leads to the quadratic 02 + (/3 - 6 + a )0 - 6a = 0 with solution 0 (the

100 CHAPTER IV. PROBABILITY OF RUIN IN FINITE TIME
sign of the square root is + because 0 > 0). But by the fundamental likelihoodratio identity (Theorem 111.4.3) we have
E [e-«T(u ); T(u) < oo]
= EB [exp {-aT(u) - 9ST(u) +T(u)!c(0)} ; T(u) < oo]
= e-OuEee-04(u)
= e-eu beBB+B
where we used that PB(T(u) < oo) = 1 because 0 > ryo and hence E9S1 = K'(0)
> 0. Using 5 = 6 - 0, the result follows. q
Note that it follows from Proposition 1.3 that we can write
Ee-aT(u) = e-euEe-017(o). (1.4)
The interpretation of this that T(u) can be written as the independent sum ofT(0) plus a r.v. Y(u) belonging to a convolution semigroup . More precisely,
M(u)
T(u) = T + E Tk
k=1
where T = T(0) is the length of the first ladder segment , Ti, T2 , ... are the lengthsof of the ladder segments 2,3,..., and M(u)+1 is the index of the ladder segmentcorresponding to T(u). Cf. Fig. 1.1 where Y1, Y2, ... are the ladder heights whichform a terminating sequence of exponential r.v.'s with rate 5.
St
at
F- T+ Ti 1 a i F- Y1 -Y2
U
Ti
T
I
Figure 1.1

1. EXPONENTIAL CLAIMS 101
For numerical purposes , the following formula is convenient by allowingt,1(u, T) to be evaluated by numerical integration:
Proposition 1.3 Assume that claims are exponential with rate b = 1. Then
V(u,T) 1 I fl(O)h(0)fdO (1.6)
where
fl(9) = fexp {2iTcos9-(1+/3)T+u(/cos9-1)
f2(0) = cos (uisin9) - cos (u/,3 sin0 + 29)
f3(0) = 1+/3-2/cos9.
Note that the case 6 # 1 is easily reduced to the case S = 1 via the formulaV,0,6(u) = Vfl/j l(Su,ST).Proof We use the formula ,i (u,T) = P(VT > u) where {Vt } is the workloadprocess in an initially empty M/M/1 queue with arrival rate 0 and servicerate S = 1, cf. Corollary 11.4.6. Let {Qt} be the queue length process of thequeue (number in system, including the customer being currently served). IfQT = N > 0, then VT = U1,T + • • • + UN,T, where U1,T is the residual servicetime of the customer being currently served and U2 , T, ... , UN,T the service timesof the customers awaiting service . Since U1 ,T, U2,T, ... , UN,T are conditionallyi.i.d. and exponential with rate S = 1, the conditional distribution of VT givenQT = N is that of EN where the r.v. EN has an Erlang distribution withparameters (N, 1), i.e. density xN-le-x/(N - 1 )!. Hence
00F(VT > u) P(QT = N)P(EN > u)
N=1
00 N-1 k
F(QT = N) e-u k!N=1 k=1
°O k
E e-u
1t P(QT - k + 1).k=0
For j = 0,1, 2, ..., let (cf. [4])
Ij (x)
00 (x/2)2n+3
OnI(n+j)!
- Iex cos B cos jO dB
fo"

102 CHAPTER IV. PROBABILITY OF RUIN IN FINITE TIME
denote the modified Bessel function of order j, let I _ j (x) = Ij (x), and definetj = e-(1+R)Taj/2Ij(2vT T). Then (see Prabhu [294] pp. 9-12, in particularequations (1.38), (1.44); similar formulas are in [APQ] pp. 87-89)
00
E aj
j= -00
00 00k+1 + t j - )3k+1
t j
j=kk+1 j=-k-1
By Euler 's formulas,
00
E '3j/2 cos(je)
j=k+1
= 1,
k -k-2
g'(QT >- k + 1) = 1 - bj+ $k+1 E
bj
j=-00 j=-00
00_ ^j/zeij = ,13(k+l)/2ei(k+1)9
R E ,(31/2eie - 1j=k+1
R [,3(k+1)/2ei(k+ l)6 (,31 /2e-ie -1)]
L I/31/2eie l- 112 1
1(k+1)/2 [31/2 cos(kO) - cos((k + 1)0)]
f3(0)00
flk+1 > 3j/2 COS(jB)
j=-k-1
00ok+lR 00 )3j/2eije = R)3(k+ l)/2e-i(k+1)e
(31 /2eie - 1j=-k-1
R [/3( k+1)/2e- i(k+1)e (01 /2 e- ie - 1)]L lal/2e:0
_112
/(k+1)/2 [,(31/2 cos((k + 2)9) - cos ((k + 1)0)]
f3(9)Hence the integral expression in (1.8 ) yields
F(QT > k + 1) - )3k+1
= e-(1+0)T e201/2Tcos e )3(k+l)/2 [31/2 cos (kO) - cos((k + 2)9)]
d9.7r 30 f3(0)

2. THE RUIN PROBABILITY WITH NO INITIAL RESERVE
Since P(QOO > k + 1) = flk+1, it follows as in (1.7) that
(30 kCu)_
L.[^ a-u ak+l
k=0
A further application of Euler's formulas yields
103
cc k__U #kJ2 cos((k + 2)9) = R
L
eNO ^` (u^1'ese)k =ateU161/2 e '0+2iO
k=0 L k=O I= eup i/z
COS a cos(u(31/2 sin 9 + 20),Co Uk
)3k z cos(k9) ==
Roo (u)31/2e^e)k
ate"o'/z e,e
E F- k !k.k=O
k.k-0 =i/z
= e' COS a cos(uf31/2 sin 0).
The rest of the proof is easy algebra. q
Notes and references Proposition 1.3 was given in Asmussen [12] (as pointedout by Barndorff-Nielsen & Schmidli [59], there are several misprints in the formulathere; however, the numerical examples in [12] are correct). Related formulas are inTakacs [359]. Seal [327] gives a different numerical integration fomula for 1 - 0(u,T)which, however, is numerically unstable for large T.
2 The ruin probability with no initial reserve
In this section , we are concerned with describing the distribution of the ruintime T(0) in the case where the initial reserve is u = 0. We allow a generalclaim size distribution B and recall that we have the explicit formula z/i(0) _P(7(0) Goo) = p.
We first prove two classical formulas which are remarkable by showing thatthe ruin probabilities can be reconstructed from the distributions of the St, or,equivalently, from the accumulated claim distribution
N,
F(x, t) = P,
Ui < x I
/
(note that P(St < x) = F(x + t, t )). The first formula , going back to Cramer,expresses V)(0, T) in terms of F(., T), and the next one (often called Seal's for-mula but originating from Prabhu [293]) shows how to reduce the case u 54 0 tothis.

104 CHAPTER IV. PROBABILITY OF RUIN IN FINITE TIME
T
Theorem 2 . 1 1 - i,b (0,T)f
T F(x,T)dx.
Proof For any v E [0,T], we define a new claim surplus processlStv)} 0<t<T
by a 'cyclic translation', meaning that we interchange the two segments of the
arrival process of {St}o<t<_T corresponding to the intervals [0, v], resp. [v, T].
See Fig. 2.1.
St
NJ
Figure 2.1
In formulas,
St+v - S„ 0 <t<T-vStv^ _
ST-S„+St_T+v T-v<t<T
Define
M(v,t)= {Stv) < SM,0<w<t}
as the event that I S,(,,") } is at a minimum at time t. Then
SMt
1 - (0, T) = P(Tr(0) > T) = P(M(0,T))
1 fT P(M(v,T))dv E^T I(M(v,T))dv,T T o
where the second equality follows from II.(6.3) with A = (0, co ), and the third
from the obvious fact (exchangeability properties of the Poisson process) that
{Stv)}has the same distribution as St = { Si0)} so that P(M(v,T)) does not
depend on v.

2. THE RUIN PROBABILITY WITH NO INITIAL RESERVE 105
Now consider the evaluation of fo I(M(v, T)) dv. Obviously, this integral
is 0 if STv) . ST > 0. If ST < 0, there exist v such that M(v,T) occurs. Forexample, letting w = inf It > 0 : St_ = mino<w<T Sw}, we can take v E (w -E, w) for some small E. We claim that if M(0, T) occurs, then M(v, T) = M(0, v).Indeed, we can write M(v, T) as
{ST<St+v-S,,, 0<t <T-v}n{ST<ST -Sv+St-T+v, T- v<t<T}
= {ST<St-Sv, v<t<T}n{ST<ST-Sv+St, 0<t<v}
= {ST < St - Sv, v < t < T} n M(0, v) = M(0, v),
where the last equality follows from ST < St on M(0,T) and Sv < 0 on M(0, v).It follows that if M(0 , T) occurs, then
i fT I(M(v,T)) dv fT I(M(0 , v)) dv = -STT T o
(note that the Lebesgue measure of the v for which {St} is at a minimum atv is exactly -ST on M (0, T)). It is then clear from the cyclical nature of theproblem that this holds irrespective of whether M(0,T) occurs or not as longas ST < 0. Hence
TE fT
I(M(v, T)) dv
= TEST = T fP(ST < -x) dx
T T NT
1 f P(ST < -x) dx = 1 f PT
Ui T - xdx.T o -
Let f (•, t) denote the density of F(•, t).
i=1
T
Theorem 2 .2 1-0(u,T) = F(u+T,T)-f(I -z /)(0,T-t))f(u+t,t)dt.
Proof The event {ST < u} = { Ei T Ui < u + T j can occur in two ways:
either ruin does not occur in [0, T], or it occurs, in which case there is a lasttime o where St downcrosses level u, cf. Fig 2.2.

106 CHAPTER IV. PROBABILITY OF RUIN IN FINITE TIME
u
IIQ T
Figure 2.2
Here o, E [t, t + dt] occurs if and only if St E [u, u + dt] and there is no upcrossingof level u after time t, which occurs w.p. O(T - t). Hence
P(ST<u) = 1 - b(u,T)+ J (1-V,(0,T-t))P(StE[u,u+dt]),T0
which is the same as the assertion of the theorem. q
The following representation of T(0) will be used in the next section. Theproof is combined with the proof of Theorem 111.2.2.
Proposition 2.3 Define r_ (z) = inf It > 0 : St = -z}, z > 0. Let Z be a r.v.
which is independent of St and has the stationary excess distribution B0. Then
P(T(0) E • I T(0) < oo) = P(T_ (Z) E •).
Proof of Theorem 111.2 .2. For a fixed T > 0, define St = ST - ST_ t_ and let
A(z,T) = {St < 0, 0 < t < T, ST_ _ -z} ,
C(z,T) = {St > -z, 0 < t <T, ST_ _ -z},
C*(z,T) = {S t > -z, 0 < t <T, ST_ _ -z}.

2. THE RUIN PROBABILITY WITH NO INITIAL RESERVE
Then
107
P(r(0) E [T,T + dT], -ST(o)_ E [z, z + dz]) = P(A(z,T))f3B(z) dz dT. (2.1)
-zT
-------------- -------
Figure 2.3
But by sample path inspection (cf. Fig. 2.3), A(z,T) = C*(z,T), and since{St}o<t<T, {St }o<t<T have the same distribution , we therefore have P(A(z,T))= P(Cx;T)). Hence integrating (2.1) yields
P(-ST(o)_ E [z, z + dz], r(0) < oo)
= 3R(z) dz JP(C(z,T))dT
= Off(z) dz P(T_ (z ) < oo) = 3B(z) dz.
Thus
P(-Sr(o)_>x,ST(o) >y;T(0)<oc)
= f F(U > y + z U > z) P(Sr(o)_ E [z, z + dz], T(0) < oo)
B(y+ z) f3-B(z) dz = 3 f °^ B(y + z) dz = f3 f B(z) dz,
x B(z) x + v
which is the assertion of Theorem 111.2.2. q
Proof of Proposition 2.3. It follows by division by P(ST(o)_ E [z, z + dz], T(0) <oo) = OR(z) dz in (2.1) that
P(T(0) E [T, T + dT] I S7(o)_ E [z, z + dz], 7-( 0) < oo) = P (C(z)) dT.

108 CHAPTER IV. PROBABILITY OF RUIN IN FINITE TIME
Hence
]P(7-(0) E [T,T + dT] T(0) < oo)
dT f ' P(C(z))P(Sr(o)_ E [z, z + dz], T(0) < oo)0
= dT f P(C(z))P(Z E [z, z + dz], T(0) < oo)0
= dTP(T_(Z) E [T,T+dT]).
Notes and references For Theorems 2.1, 2.2, see in addition to Prabhu [293] alsoSeal [326], [329]. Theorem 2.1 and the present proof is in the spirit of Ballot theorems,cf. Tak'ecs [359]; a martingale proof is in Delbaen & Haezendonck [103].
Proposition 2.3 was noted by Asmussen & Kl(ippelberg [36], who instead of thepresent direct proof gave two arguments, one based upon a result of Asmussen &Schmidt [49] generalizing Theorem 11.6.5 and one upon excursion theory for Markovprocesses (see IX.5a).
In the setting of general Levy processes, some relevant references are Shtatland[338] and Gusak & Korolyuk [181].
3 Laplace transforms
Throughout in this section , r(a) denotes the solution < 'Yo of the equation
-a = ic(r (a)) = ,(3(B[r(a)] - 1) - r(a), (3.1)
where -a > r.(-yo).Let T_ (y) be defined as Proposition 2.3. Note that T_ (y) < oo a.s. because
of77>0.
Lemma 3.1 Eear-(y) = eyr(a).
Proof Optional stopping of the martingale
I er(a) 9 -t,c(r(a)) l = ler(a)se+at }
yields 1 = e-yr(a)Eear-(y). I L
q
Let ga(x) be the density of the measure E[ear(°); r(0) < oo, ^(0) E dx](recall that ^(0) = Sr(o)) and write ga[b] = f OD ebxga(x) dx.
Lemma 3 .2 ga(x) = Qe-xr(a) f "o eyr(a)B(dy)
x

3. LAPLACE TRANSFORMS 109
Proof Let Z be the surplus -ST(o)_ just before ruin . Then by Proposition 2.3,E[ear
(o) I T(0) < oo , Z = y] = EeaT- ( v) = ev''(a).
Further by Theorem 111.2.2
P(Z E [y, y + dy], £(0 ) E dx) = /3B(x + dy) dx
and hence
ga(x)= f
e r)/3B(x + dy) _ /3 f e(v-x)(a)B(dy)•
x
Lemma 3 .3 ga[b] = c(b)+ b + a - r(a)
b - r(a)
Proof
Q f
oo
ex(b-r(a))dx f eyr(a)B(dy)000 x
Q f evraB(dy) e-(a))dx0
Q cc
b - r(a) evr(a)B(dy)[ev(b-r (a)) - 1]
= a [B[b] -B[r(a)]] .b - r(a)
The result now follows by inserting /3B[s] = ic(s) +/3+ s and ic(r(a)) =-a. q
Corollary 3.4 E[eaT (o); rr(0) < oo) = 1_ r(a)
Proof Let b = 0. q
Here is a classical result : the double m.g.f. (Laplace transform) of the ruintime T(u):
Corollary 3.5fo
eb"E[eaT(" ); T(u) < oo] du =-a/r(a) - ic(b)/b
00 x(b) + a
Proof Define Za(u) = E [eaT(" ); r(u) < oo). It is then easily seen that Za(u)is the solution of the renewal equation Za (u) = za (u) + fo Z. (u - x)ga (x) dxwhere za(u) = f,°° ga(x)dx. Hence
0TOeb"du E[eaT(");T(0) < oo] = 20[b] = za[b] (9a[b] -9a[0])/b
1 - ga [b] 1 - ga [b]
Using Lemma 3.3, the result follows after simple algebra. q

110 CHAPTER IV. PROBABILITY OF RUIN IN FINITE TIME
4 When does ruin occur?
For the general compound Poisson model, the known results are even less explicitthan for the exponential claims case, and take basically the form of approxima-tions and inequalities.
The first main result of the present section is that the value umL, where
_ 1 _ 1 - 1 - C
ML w(ry) 6B'[7J -1 ,3LELU -1 1-p'
is in some appropriate sense critical as the most 'likely' time of ruin (here C isthe Cramer-Lundberg constant). Later results then deal with more precise andrefined versions of this statement.
Theorem 4 .1 Assume 77 > 0. Then given r(u) < 00, T(u)/u mL as u -+ oo.
That is , for any c > 0
P( T(u)- mL > E T(u) < 00 ) -40. (4.1)
Further, for any m
u
i,h(u, mu ) ( 0 m < ML
'(u) 1 m > rL.
For the proof, we need the following auxiliary result:
Proposition 4.2 Assume ri < 0, i.e. P = /3µB > 1. Then as u -* oo,
T(u) a.. 1 ET(u) 1
u p-1 u P-
7-(u) - mu D 2
v/,U--4 N(0,w ) where w2 = 311B)m3•
Proof The assumption 11 < 0 ensures that P(T(u) < oo) = 1 and r(u) a4' oo.
By Proposition 111.1.2, St/t 1 1/m, and hence a.s.
t T(u) T(u) T(u)m = lim = lim = lim t = lim ,
t- 00 St u-+oo S, (u) U-tioo u + Sr(u) uoo u
using e,(u) = o(u) a.s., cf. Proposition A1.6. This proves the first assertion of(4.3). For the second , note that by Wald's identity
u + EC(u) = ES.r(u) = Er(u) • ES, = (p - 1)Er(u)

4. WHEN DOES RUIN OCCUR? 111
and that Ee(u)/u -a 0, cf. again Proposition A1.6.For (4 .4), note first that (Proposition 111.1.5)
St - t/m D (2)
,^N (o, apB ) .
According to Anscombe' s theorem (e.g. Theorem 7.3.2 of [86]) and (4.3), thesame conclusion holds with t replaced by r(u). If Z - N(0,1), this can berewritten as
u + 1(u) -,r(u)/mµB2) Z, implying
T(u) ti
T(u) - mu -m ,6µB2) Z v m (3µB2) Z,Tu)
T(u) - mu(2)'• m3/2 6 7 - -7µB -
Proof of Theorem 4.1 The l.h.s. of (4.1) is
T (u) -
mL I > E, T(u) < oo/f
UP(T(u) < 00)
e-7uEL [e_7 (t1); 1'r(U) - mL
U
0(u)
e-7'PL\ I T u) - mL >EU
11
> E, T (u) < 00J
By Proposition 4.2, PL (•)-+ 0, proving (4.1), and (4.2) follows immediately from
(4.1). q
Notes and references Theorem 4.1 is standard, though it is not easy to attributepriority to any particular author. Thus, the result comes out not only by the presentdirect proof but also from any of the results in the following subsections.
4a Segerdahl's normal approximation
We shall now prove a classical result due to Segerdahl, which may be viewedboth as a refinement of Theorem 4.1 (by considering 0(u, T) for T which areclose to the critical value umL), and as a time-dependent version of the Cramer-Lundberg approximation.

112 CHAPTER IV. PROBABILITY OF RUIN IN FINITE TIME
Corollary 4.3 (SEGERDAHL [333]) Let C be the Cramer-Lundberg constant
and define wL = f3LELU2mL = f3B"[ry]mL where ML = 1/(pL-1) = 1/($B'[ry]-
1). Then for any y,
e'°'/b (u,um,L+YWLV'U) -a C4'(y)• (4.5)
For the proof, we need the following auxiliary result:
Proposition 4.4 (SIAM'S LEMMA) If 71 < 0, then e(u) and r(u) are asymp-
totically independent in the sense that, letting Z be a N(0,w2) r.v. with w2 as
in (4.4), one has
Ef (^(u))9 (r(u)_rnu)
-* E.f ( (oo)) . E9(Z) (4.6)
whenever f, g are continuous and bounded on [0, oo ), resp . (-oo, oo).
Proof Define u' = u - ul/4. Then the distribution of T(u) - T(u') given F,(u,)is readily seen to be degenerate at zero if ST(u•) > u and otherwise that of T(v)
with v = u - ST( u') = u1/4 - ^(T(u')). Using (4.3), we get
E[T (u) - T (u')] = E[T (ul /4 - VU T; S(u ) < ul/4]
< ET(ul /4) = O(ul/4),
and thus in (4.6), we can replace T(u) by r(u'). Let h(u) = E f (^(u)). Then
h(u) -4 h(oo) = E f (6(oo)), and similarly as above we get
E[f(^(u)) I -Fr(u,))IC fh(ul /4 - ^(u))I(6 (u') < ul /4 ) + f(e(u') - u1/4)I(S(u') > u1 /4)
h(oo) + 0,
using that ul/4 - e(u') oo w .r.t. P because of ^(u') - l:(oo) (recall that
rt < 0). Hence
Ef (Vu ))9 (T(u,)-mu \
-
h(oo)Eg (r(ul) - mul h(oo)Eg(Z).
O

4. WHEN DOES RUIN OCCUR? 113
Proof of Corollary 4.3
ery"z/i(u , umL + ywL f) = e"P(T (u) < umL + ywL)
= EL [e-7V"); T(u) < umL + ywL f,
ELe-7E (") . PL(T(u) < umL + ywL)
-4 C4(y),
where we used Stain's lemma in the third step and (4.4) in the last. q
For practical purposes , Segerdahl 's result suggests the approximation
b(u,T) Ce-7"4 (T - umLV"UwI
(4.7)
To arrive at this , just substitute T = umL + ywL in (4.5) and solve fory = y(T). The precise condition for (4.7) to be valid is that T varies with u insuch a way that y(T) has a limit in (- oo, oo ) as u -* oo. Thus , in practice onewould trust (4.7) whenever u is large and ly(T)l moderate or small (numericalevidence presented in [12 ] indicates , however , that for the fit of (4.7) to be good,u needs to be very large).
Notes and references Corollary 4 . 3 is due to Segerdahl [333]. The present proof isbasically that of Siegmund [342]; see also von Bahr [55 ] and Gut [182]. For refinementsof Corollary 4.3 in terms of Edgeworth expansions , see Asmussen [12] and Malinovskii[254]. Cf. also Hoglund [204].
4b Gerber's time-dependent version of Lundberg's inequal-ity
For y > 0, define ay, yy by
K,(ay) =
1
17
7y = ay - yK(ay)• (4.8)
Note that ay > 7o and that 7y > •y (unless for the critical value y = 1/ML), CLFig. 0.1.
Theorem 4.5
u) <'(u -7v"< 4 9, y e , y
^'(7). )(
'5(u) - z/)(u u) < e-7v">
4 10, y , y k'(7) .( . )

114 CHAPTER IV. PROBABILITY OF RUIN IN FINITE TIME
Proof Consider first the case y < 1/K'(y). Then ic(ay) > 0 (see Fig . 0.1), and
hence
t,h(u,yu) =
e-ayuEav [e-ay4(u)+T(u)K(ay ); T(u) < yu]
Y < e-ayuEav [eT(u)K(av )L T(u) < yu} < e-ayu+yUr-(ay)
Similarly, if y > 1/ic'(y), we have rc(ay) < 0 and get
1
(u) - Y' (u, yu) = e-ayuEay [e-ay^ (u)+T(U)K (ay); yu < T
11
(u) < ool< e-ayuEav [eT (u)K(ay); yu
< T(u) < oo j< e-ayu+YUK(ay)
Remark 4.6 It may appear that the proof uses considerably less informationon ay than is inherent in the definition (4.8). However, the point is that we wantto select an a which produces the largest possible exponent in the inequalities.From the proof it is seen that this amounts to that a should maximize a-yic(a).
Differentiating w.r.t. a, we arrive at the expression in (4.8). q
In view of Theorem 4.5, yy is sometimes called the time-dependent Lundberg
exponent.An easy combination with the proof of Theorem 111.6.3 yields easily the
following sharpening of (4.9):
Proposition 4.7 i,b (u, yu) < C+(ay)e-7a„ where
C+(ay) = sup
f.00 eayR(x
l
y)B(dy)
Notes and references Theorem 4 . 5 is due to Gerber [156 ], who used a martingale
argument. For a different proof, see Martin-LM [257] . Numerical comparisons are in
Grandell [172]; the bound a-7y° turns out to be rather crude , which may be understood
from Theorem 4.8 below , which shows that the correct rate of decay of tp(u, yu) ise -'Yyu/
v. "U-.
Somefurther discussion is given in XI.2, and generalizations to more general models
are given in Chapter VI. Hoglund [203] treats the renewal case.

4. WHEN DOES RUIN OCCUR? 115
4c Arfwedson's saddlepoint approximation
Our next objective is to strengthen the time-dependent Lundberg inequalitiesto approximations. As a motivation, it is instructive to reinspect the choiceof the change of measure in the proof, i.e. the choice of ay. For any a > yo,Proposition 4.2 yields
EaT(u) u ur,.' (0) r 1 (a)
I.e., if we want EaT(u) ,: T, then the relevant choice is precisely a = ay wherey = T/u. We thereby obtain that T is 'in the center' of the Pa-distribution ofT(u). This idea is precisely what characterizes the saddlepoint method.
The traditional application of the saddlepoint method is to derive approxi-mations, not inequalities, and in case of ruin probabilities the approach leads tothe following result:
Theorem 4 .8 If y < 1/ic'(ry), then the solution &y < ay of ,c(&) = ic(ay) is< 0, and
b(u,yu)ay - ay a-.yyu
u -+ 00. (4.11)c y l ay I 21ry/3B" [ay] VfU_ '
If y > 1/ r.'(-y), then ay > 0, and
-ryyu
ii(u) - z,i(u, yu )ay-ay e
, u -4 oo. (4.12)ayay 27ry/3B"[ay] u
Proof In view of Stam 's lemma , the formula
0(u, yu) = e-ayuEay fe-ay^ ( u)+T(u)K(ay); T(u)< yu]
suggests heuristically that l
t/,(u, yu ) e-aauEaye-ayC(-) . Ea ,, [eT(u )K(ay); T(u) < yu] . (4.13)
Here the first expectation can be estimated similarly as in the proof of theCramer-Lundberg 's approximation in Chapter III. Using Lemma 111.5.6 withP replaced by Pay and FL by Pay, we have ryas = ay - ay and get
Eay
e-ayf (00) _ 'Ya( C 1 - ^3 Bay [lay - ay ] - 1 /
ayKal layy 'Yay - ay

116 CHAPTER IV. PROBABILITY OF RUIN IN FINITE TIME
y(ay - ay) ay +,(j (1 - B[ay]
/ay &y
-y(ay - ay )r.(ay) _ y(ay - ay)K(ay)
ay ayI&YI
a ^c'(ay) a
ry I i , a nr=. i B[7ay - ay + ayl /BLay] - I
ay -&y (1 +,1-B[ay]1
)
For the second term in (4.13), it seems tempting to apply the normal approxi-mation (4.4). Writing r(u) yu + ul/2wV, where V is normal(0,1) under Payand
W2 = I3ay{.l'B)y /(Pay - 1)3 = (jB"[ay]l (Pay - 1)3 = y3/3B"[ay],
we get heuristically that
Eay Ler(u)r-(ay);
T(U) < yu]
= eyuk (ay)E''ay (ek(ay )"1/2WV; V < 01
Ir 00eyur. (ay)
Je-r(ay)"1'2"'x c2(x) dx
000
1/2 1 e-zcp(z/(k(ay)u1 /2w)) dz
w)uK(ay
= eyu-(ay)
/O° _ 11 e ZJ
,c(ay)ul/2W p 2ir
rc(ay ) 2,7ruw2
Inserting these estimates in (4.13), (4.11) follows. The proof of (4.12) isentirely similar. 0
The difficulties in making the proof precise is in part to show (4.13) rigor-ously, and in part that for the final calculation one needs a sharpened versionof the CLT for t(u) (basically a local CLT with remainder term).
1
1
dz
Example 4.9 Assume that B(x) = e-ay. Then ic(a) = ,3(5/(S - a) - 1) - a,,c'(a) _ /3a/(8 - a)2 - 1, and the equation ic'(a) = 1/y is easily seen to have

5. DIFFUSION APPROXIMATIONS 117
solution
ay=5- V1
(the sign of the square root is - because the c.g.f. is undefined for a > 5). Itfollows that
5^y =5-ay = 1+1/y' /«y =f3+ay=l3+d-V1+^1/y
/35ay -ay =Qay -say =,3+5-2 1+/351/y' sy 1+1/y -/3'
7 25 _ 251/2(1 + y)3/2Bii[ay] (5 - ay)3 03/2
and (4.11) gives the expression
'31/4 ('3 + s _2 / , )y a-''y"
(s - vc i L ) ('3 _ vfl ) 51 /4(1 +1IY)3/4 \,/4^y
for 1/i (u, yu) when y < 1/ic'('y) = p/1 - p. 0
Notes and references Theorem 4.8 is from Arfwedson [9]. A related result ap-pears in Barndorff-Nielsen & Schmidli [59].
5 Diffusion approximations
The idea behind the diffusion approximation is to first approximate the claimsurplus process by a Brownian motion with drift by matching the two firstmoments, and next to note that such an approximation in particular impliesthat the first passage probabilities are close.
The mathematical result behind is Donsker's theorem for a simple randomwalk {Sn}n=o,1,... in discrete time: if p = ES, is the drift and o, 2 = Var(Si )the variance, then
{Wo ( t)}t>0 , c -a 00, (5.1){ __ ,= (s, - tcp) Lo

118 CHAPTER IV. PROBABILITY OF RUIN IN FINITE TIME
where {W( (t)} is Brownian motion with drift S and variance (diffusion constant)
1 (here 2 refers to weak convergence in D = D[0, oo)).It is fairly straightforward to translate Donsker's theorem into a parallel
statement for continuous time random walks (Levy processes), of which a partic-
ular case is the claim surplus process (see the proof of Theorem 5.1 below). How-ever, for the purpose of approximating ruin probabilities the centering around
the mean (the tcp term in (5.1)) is inconvenient. We want an approximation
of the claim surplus process itself, and this can be obtained under the assump-
tion that the safety loading rt is small and positive. This is the regime of the
diffusion approximation (note that this is just the same as for the heavy trafficapproximation for infinite horizon ruin probabilities studied in III.7c).
Mathematically, we shall represent this assumption on 77 by a family {StP) Lo
of claim surplus processes indexed by the premium rate p, such that the claim
size distribution B and the Poisson rate a are the same for all p (i.e., St =
EN` U= - tp), and consider the limit p j p, where p is the critical premium rate
APB-
Theorem 5 .1 As p J, p, we have
)}t>o (5.2){i!ts: ,,z } {W_1(tt>o
where p = pp = p - p, a2 =/3µB2)
Proof The first step is to note that
{ WC (St P) - tcpp) y = { WC (Sct) -pct) } {Wo(t)}t>o (5.3)
whenever c = cp f oo as p 1 p. Indeed , this is an easy consequence of (5.1) with
S;a = Snp) and the inequalities
Sn )C - p/c < St(p) < S((n+l)/c + Pp/c, n/c < t < (n + 1)/c,
cf. Lemma 111.1.3.Letting c = a2/pp, (5.3) takes the form
{LI S(P)a2 to2/µ2 + t
LI S (P){ a2 ta2/µ2
{W0(t)},
+ {Wo(t ) - t} _ {W_1(t)} .
0

5. DIFFUSION APPROXIMATIONS 119
Now let
Tp(u) = inf{t>0: S?)>u}, TS(u)=inf{t>0: WW(t)>u}.
It is well-known (Corollary XI.1.8 or [APQ] p. 263) that the distribution IG(•; ('; u)of r( (u) (often referred to as the inverse Gaussian distribution) is given by
\IG(x; C; u) =PIT( (u) < x) = 1 - 1 I - (7= ^ I + e2( I - - f I
\\\ J \(5.4)
Note that IG(.; (; u) is defective when < 0.
Corollary 5.2 As p j p,
(ua2 To-2o IG T 1p
\ I P I ^ p2-> ;-( ;u).
Proof Since f -4 SUP0<t<T f (t) is continuous on D a.e. w.r.t. any probabilitymeasure concentrated on the continuous functions, the continuous mapping the-orem yields
sup W S 2 4 sup W-i(t)•O<t<T a2
toz
l P O<t<T
Since the r.h.s. has a continuous distribution, this implies
P sup12 Stu2 /µ2 > u -4 P (O<t<T
sup W_1(t) > u0<t<T a
But the l.h.s. is 1/ip (ua2 /IpI,Ta2 /p2), and the r.h.s. is IG(T; -1; u). q
For practical purposes , Corollary 5 .2 suggests the approximation
0(u,T) IG(Tp2/a2); ulpI/a2). (5.5)
Note that letting T --* oo in (5.5), we obtain formally the approximation
V,(u) ti IG(oo; ulpl /a2) = e-2"1µl /or2. (5.6)
This is the same as the heavy -traffic approximation derived in III.7c. However,since ti(u) has infinite horizon , the continuity argument above does not gener-alize immediately , and in fact some additional arguments are needed to justify(5.6) from Theorem 5.1. Because of the direct argument in Chapter III, we omitthe details ; see Grandell [ 168], [169] or [APQ] pp. 196, 199.

120 CHAPTER IV. PROBABILITY OF RUIN IN FINITE TIME
Checks of the numerical fits of (5.5) and (5.6) are presented, e.g., in Asmussen[12]. The picture which emerges is that the approximations are not terriblyprecise, in particular for large u. In view of the excellent fit of the Cramer-Lundberg approximation, (5.6) therefore does not appear to of much practicalrelevance for the compound Poisson model. However, for more general modelsit may be easier to generalize the diffusion approximation than the Cramer-Lundberg approximation; as an example of such a generalization we mentionthe paper [129] by Emanuel et al. on the premium rule involving interest. In
contrast, the simplicity of (5.5) combined with the fact that finite horizon ruinprobabilities are so hard to deal with even for the compound Poisson modelmakes this approximation more appealing. However, in the next subsection weshall derive a refinement of (5.5) for the compound Poisson model which doesnot require much more computation, and which is much more precise.
We conclude this section by giving a more general triangular array versionof Theorem 5.1. The proof is a straightforward combination of the proof ofTheorem 5.1 and Section VIII.6 of [APQ].
Theorem 5.3 Consider a family {Ste) } oc claim surplus processes indexed by
a parameter 9, such that the Poisson rate Oe, the claim size distribution B9 andthe premium rate p9 depends on 0. Assume further that 039µB6 < pe, that
D00 -4090, B0 * Boo, pt? -4 peo, pe - 00µB6 -+ 0,
as 0 -* 00 and that the U2 are uniformly integrable w.r.t. the B9. Then as
0 _+ 90, we have
^A,S
0) D {{ 2 tQ2/µ2
W_ i(t)}t>ot>o
2where p = pe = pe - Po = 09µB6 - Pe, a2 = ae = 00µa6
Notes and references Diffusion approximations of random walks via Donsker's
theorem is a classical topic of probability theory. See for example Billingsley [64]. The
first application in risk theory is Iglehart [207], and two further standard references inthe area are Grandell [168], [169]. All material of this section can be found in these
references.
For claims with infinite variance, Furrer, Michna & Weron [152] suggested anapproximation by a stable Levy process rather than a Brownian motion. Furtherrelevant references in this direction are Furrer [151] and Boxma & Cohen [75].

6. CORRECTED DIFFUSION APPROXIMATIONS 121
6 Corrected diffusion approximations
The idea behind the simple diffusion approximation is to replace the risk processby a Brownian motion (by fitting the two first moments ) and use the Brown-ian first passage probabilities as approximation for the ruin probabilities. SinceBrownian motion is skip-free, this idea ignores (among other things) the pres-ence of the overshoot e(u), which we have seen to play an important role for ex-ample for the Cramer-Lundberg approximation . The objective of the correcteddiffusion approximation is to take this and other deficits into consideration.
The set-up is the exponential family of compound risk processes with pa-rameters (3B, B9 constructed in III .4. However , whereas there we let the givenrisk process with safety loading 77 > 0 correspond to 9 = 0 , it is more convenienthere to use some value 9o < 0 and let 9 = 0 correspond to n = 0 (zero drift);this is because in the regime of the diffusion approximation , 77 is close to zero,and we want to consider the limit 77 10 corresponding to Oo f 0.
In terms of the given risk process with Poisson intensity ,6, claim size distri-bution B , ,c(s) = ,Q (B[s] - 1) - s and p = /3µB < 1, 77 = 1/p - 1 > 0, this meansthe following:
1. Determine yo > 0 by r.'(-yo) = 0 and let 90 = -'Yo.
2. Let PO refer to the risk process with parameters
e-9ozQo = QB[-90], Bo(dx) = B[-eo]B(dx).
Then EOU' = Boki[0] = Biki[-eo]/E[-9o] and "(s) = k(s-Bo)-k(-9o),0(0) = 0.
3. For each 9, let P9 refer to the risk process with parameters
e9z keo)zQ9 = QoB0[9] = QB[9-9o], B9(dx) =Bale] Bo(dx)
= B[9 - 90] B(dx).
Then
r.9(s) = Ico (s + 9) - ao (0) _ /c(s + 9 - 90) - /c(9 - 90)
and the given risk process corresponds to Poo where 90 = -'yo.
In this set-up, P9(r (u) < oo) = 1 for 9 > 0, PB('r(u ) < oo) < 1 for 9 < 0, andwe are studying b(u,T) = Peo(-r(u ) < T) for 90 < 0, 9o T 0.

122 CHAPTER IV. PROBABILITY OF RUIN IN FINITE TIME
Recall that IG(x; C ; u) denotes the distribution function of the passage timeof Brownian motion {W((t)} with unit variance and drift C from level 0 to level
u > 0. One hasIG(x; C; u) = IG(x/u2; (U;1) . (6.1)
The corrected diffusion approximation to be derived is
(u,T) ,;; IGu+u2,-2'1+u2 (6.2)
where as ususal ry > 0 is the adjustment coefficient for the given risk process,
i.e. the solution of r.(-y) = 0, and
U3Si = QoEoU2
= QB"'['Yo], S2 =Eo
3E0U2Bier [Yo]
3B"[Yo]
Write the initial reserve u for the given risk process as u = C/Oo (note that
C < 0) and, for brevity, write r = T(u), _ ^(u) = ST - u. The first step in the
derivation is to note that
µ = k (0) = r-0, (00) ,., 9otc0" (0) = 0061 = ul,
Vargo S, - Varo S1 = f30Eo U2 = S1, 0o to.
Theorem 5.3 applies and yields
1061U61 Stdlu2/CZdi
which easily leads to
1 StU2{ u S1 t>o
{W_1(t)}t>0t>0
{W( J(t)1t>0
Y'(u, tu2 ) -i IG (t; (01; bl IG(t81; (; 1) •
Since
L e-atIG (dt; (, u) = e-uh(a ,() where h (A, C) = 2A + (2 - C, (6.3)
this implies (take u = 1)
Ego exp { -.S,7-(u)/u2} e-h(A,()
The idea of the proof is to improve upon this by an O (u-1) term (in the following,
means up to o(u-1) terms):

6. CORRECTED DIFFUSION APPROXIMATIONS 123
Proposition 6.1 As u -+ oo, 9o T 0 in such as way that C = Sou is fixed, itholds for any fixed A > 0 that
Ego exp { -Ab1rr(u)/u2} -- exp { -h(A, - 'yu /2)(1 + b2/u)}1I
+ Aug
J . (6.5)
Once this is established , we get by formal Laplace transform inversion that
2Cu, bl I IG I t +2 ; - ry2 ;1 + u2 I
Indeed, the r.h.s. is the c.d.f. of a (defective) r.v. distributed as Z - 52/u whereZ has distribution IG (•; - z ;1 + u-629. But the Laplace transform of such a r.v.is
Ee-azead2/++ Ee-az[1 + ab2/u]
where the last expression coincides with the r.h.s. of (6.5) according to (6.3).To arrive at (6.2 ), just replace t by Tb1/u2.
Note, however , that whereas the proof of Proposition 6.1 below is exact, theformal Laplace transform inversion is heuristic: an additional argument wouldbe required to infer that the remainder term in (6.2) is indeed o(u-1), Thejustification for the procedure is the wonderful numerical fit which has beenfound in numerical examples and which for a small or moderate safety loading 77is by far the best amoung the various available approximations [note, however,that the saddlepoint approximation of Barndorff-Nielsen & Schmidli [59] is aserious competitor and is in fact preferable if 77 is large] . A numerical illustrationis given in Fig. 6 . 1, which is based upon exponential claims with mean µB = 1.The solid line represents the exact value , calculated using numerical integrationand Proposition 1.3, and the dotted line the corrected diffusion approximation(6.2). In ( 1) and (2), we have p =,3 = 0.7, in (3) and (4), p = 0.4. The initialreserve u has been selected such that the infinite horizon ruin probability b(u)is 10% in (1) and (3), 1% in (2) and (4).

124 CHAPTER IV. PROBABILITY OF RUIN IN FINITE TIME
0.1 W IU.TI 0.111 W(U.T)
0.08 a.aa1
0s-(Inc.
0.1140.OOIi
O.W210.02
I 90 120 160 2W A0 Z WT 40 80 120 160 100 240 280 T
111 111
WI..T1 00..T)
0.010.
OM
0.199
0.08
0.07 0.(061
0.0
0.00
0.05{
0.01111.19)2
11 20 L1 60 T IM 20 i0 T 1n0
Figure 6.1
It is seen that the numerical fit is extraordinary for p = 0.7. Note that theordinary diffusion approximation requires p to be close to 1 and '0 (u) to be not
too small, and all of the numerical studies the author knows of indicate thatits fit at p = 0.7 or at values of Vi(u) like 1% is unsatisfying. Similarly, the fitat p = 0.4 may not be outstanding but nevertheless, it gives the right orderof magnitude and the ordinary diffusion approximation hopelessly fails for thisvalue of p. For further numerical illustrations, see Asmussen [12], Barndorff-Nielsen & Schmidli [59] and Asmussen & Hojgaard [34].
The proof of Proposition 6.1 proceeds in several steps.
h(X,() 0 p ( 7 S A51 7- (SAT 3 3Lemma 6.2 e- EB exp h ^)u - u2 2u3 (e - ^) .

6. CORRECTED DIFFUSION APPROXIMATIONS 125
Proof For a>0,
1 = PB(T < oo) = Eo0 exp { (B - 00)(u +C) - 'r (,co (e) - r-0 (00)) }
Replacing B by 8/u and Bo by C/u yields
e-(B-()= E eo exp { (e - C)C/u - T (co (8/u) - ,co ((/u)) }
Let 8 = (2a + (2)1/2 = h(), () + C and note that
2
KO (0) = 102,3 EoU2 + 103OoEoU3 + " + a1b2 + .... (6.6)6 2
Using d2 - C2 = 2), the result follows. q
U3Lemma 6 .3 lim Eof(u) = EoC(oo) = a2 Ep=u-roo 3EoU2
Proof By partial integration , the formulas
imply
Po(C(0) > x)
Po(C(co) > x)
1 °°Po(ST(o) > x) = EIU fIP0 (U>y)dy ,
1 / Po(C(0) > y) dyEoC(0) x
k EDUk+1 k Eo[(0)k+1
EoC(0) _ (k + 1)EoU' EoC(^) _ (k + 1) Eo£(0)
Lemma 6 .4 Ea, exp alue }1J3
I -[2),+exP h (A, C) 1 1 + u2/ 111 + 2u CZ Z -
(2A + ()1/2 J 1
Proof It follows by a suitable variant of Stam's lemma (Proposition 4.4) that
the r .h.s. in Lemma 6.2 behaves like C l
Eeo eXp r _ ^81T 1[1+h(AC) S - 61a2T (B3 - (3)JSl u2 1 u 2u3
Eeo expt _ aa1T l + e-h(A,1) h(A, () 62
u2 J u
- 2u (B3- (3)Eea LauT exp --i 3J . (6.7)2 2

126 CHAPTER IV. PROBABILITY OF RUIN IN FINITE TIME
The last term is approximately
(e3
-(3) d
e-h(A,S)
27.6 d
62- 2,\+ (2 (3 e2u [ (2,\ + () 1 / 2
3- 2u [2A+ (2
- (2A + ()1/21exp S -h(A, C) (1+ u2
The result follows by combining Lemma 6 . 2 and (6.7) and using
e-h(a.() - e-h(aS)h(^^ 262
exp {_h(.x,() I 1 + u2 ) y .
0
The last step is to replace h(A, () by h(\, -yu/2). There are two reasons for
this : in this way, we get the correct asymptotic exponential decay parameter^/ in the approximation (6.2) for O(u) (indeed , letting formally T -* oo yields
7/)(u) C'e-7u where C' = e-7a2); and the correction terms which need to beadded cancels conveniently with some of the more complicated expressions inLemma 6.4. l
Lemma 6 . 5 exp { _h(A) (1 + / yu J))
exp 1- h (A, --yu/2) 11+ 62 I} S 1\\\ u/11 l
62 (3
2u 2A
Proof Use first (6.6) and 7co (Oo) = ico('y + Bo) to get
0 = 21 (^/2 + 2y90) + 1112 (_Y3 + 3_Y200 + 3y9o) + O(u-4),
2 + 00a2
= - 2 (^/2 + 3y9o + 390) + O(u-3).
Thus -y = -290 + O(u-2), and inserting this and 9o = S/u on the r.h.s. yields
2+90
62 0 + O(u -3) 2u2+O(u-3).
Thus by Taylor expansion around ( = 90u, we get
h(A, -yu/2) h(A, () - - 1 (y/2 + Oo)u ,[2+ (2

7. HOW DOES RUIN OCCUR? 127
exp { -h(x, -'yu/2) (i+ Mpz^ exP { -h (A, () I 1 + u 2 ) } S 1 - (i+ 62 ) 2A + (2 - 1 (-y/2 + Oo)u
exP{ -h(A, () (i+a) }
( i + ) S -1J 62(2U [2+ C2 2u
Pt^
exp { -h(A, ()}
3
exP { -h (A, () I 1 + u2 )I 2u62 L 2A+C2_(2 1 exp {_h, ()} .
0
Proof of Proposition 6.1: Just insert Lemma 6.5 in Lemma 6.4. q
Notes and references Corrected diffusion approximations were introduced bySiegmund [345] in a discrete random walk setting, with the translation to risk processesbeing carried out by the author [12]; this case is in part simpler than the general randomwalk case because the ladder height distribution G+ can be found explicitly (as pBo)
which avoids the numerical integration involving characteristic functions which wasused in [345] to determine the constants.
In Siegmund's book [346], the approach to the finite horizon case is in part differentand uses local central limit theorems. The adaptation to risk theory has not been
carried out.The corrected diffusion approximation was extended to the renewal model in As-
mussen & Hojgaard [34], and to the Markov-modulated model of Chapter VI in As-mussen [16]; Fuh [148] considers the closely related case of discrete time Markov addi-
tive processes.Hogan [200] considered a variant of the corrected diffusion approximation which
does not require exponential moments. His ideas were adapted by Asmussen & Bin-swanger [27] to derive approximations for the infinite horizon ruin probability 'i(u)when claims are heavy-tailed; the analogous analysis of finite horizon ruin probabili-
ties O(u,T) has not been carried out and seems non-trivial.
7 How does ruin occur?
We saw in Section 4 that given that ruin occurs, the 'typical' value (say in senseof the conditional mean) was umL, that is, the same as for the unconditionalLundberg process. We shall now generalize this question by asking what asample path of the risk process looks like given it leads to ruin. The answer issimilar: the process behaved as if it changed its whole distribution to FL, i.e.

128 CHAPTER IV. PROBABILITY OF RUIN IN FINITE TIME
changed its arrival rate from 0 to /3L and its claim size distribution from B to BL.
Recall that .FT(u) is the stopping time o-algebra carrying all relevant information
about r(u) and {St}o<t<T(u)• Define P(u) = P(•IT(u) < oo) as the distributionof the risk process given ruin with initial reserve u. We are concerned withdescribing the F(u) -distribution of {St}o<t<T(u) (note that the behaviour after
rr(u) is trivial: by the strong Markov property, {ST(u)+t - ST(u)}t> o is just an
independent copy of {St}t>o).
Theorem 7 .1 Let {F(u)}u>0 be any family of events with F(u) E F, (u) and
satifying PL(F(u)) -* 1, u -* oo. Then also P(u)(F(u)) -+ 1.
Proof
P(u) (F(u)c) = F(flu)c; r(u) < oo) - EL[e-7S- (u); F(u)c]P(r(u) < oo) ?P(U)
< EL[e-7u; F(u)c] ti e-'ru]PL (F(u)`) --> 0.- vi(u) Ce-'Yu
Corollary 7.2 If B is exponential, then P(u) and FL coincide on
.FT(u)- = o' (T(u ), {St}0< t<T(u))
Proof Write e-'rsr(u ) = e-'rue-'r£(u). In the exponential case , .F,(u)_ and ^(u)
are independent , so in the in the proof, the numerator becomes
e-'ruELe-7^ (u)PL(F(u)t) = e-7uCFL (F(u)°)
when F(u) E .F,(u)_ and similarly the denominator is exactly equal to Ce-7u.
Note that basically the difference between FT(u) and .T,(u)_ is that i;(u) is not
.TT(u) _-measurable. In fact, ^(u) is exponential with rate 8 w.r.t. P(u) and rate
= aL w.r.t. FLAs example, we give a typical application of Theorem 7.1, stating roughly
that under F(u), the Poisson rate changes from ,3 to ,3L and the claim size dis-tribution from B to BL. Recall that 13L = (3B[ry] and BL(dx) = e'rxB(dx)/B[7],
and let M(u) be the index of the claim leading to ruin (thus T(u) = Ti + T2 +... + TMOO ).

7. HOW DOES RUIN OCCUR?
Corollary 7.3
M(u) pcu)
M(u) >2 I(Tk < x) 1 - e-aLx,
M(tu) p(u)
M(u) >2 I(Uk < x) BL(x).
Proof For the first assertion, take
I(Tk < x) - (1 - e-ALx)M(u)
k=1
129
The proof of the second is similar. q
Notes and references The results of the present section are part of a more general
study carried out by the author [11]. A somewhat similar study was carried outin the queueing setting by Anantharam [6], who also treated the heavy-tailed case;however, the queueing results are of a somewhat different type because of the presenceof reflection at 0.
From a mathematical point of view, the subject treated in this section leads into
the area of large deviations theory. This is currently a very active area of research, seefurther XI.3.

This page is intentionally left blank

Chapter V
Renewal arrivals
1 Introduction
The basic assumption of this chapter states that the arrival epochs O'1, D'2, .. .of the risk process form a renewal process: letting Tn = Qn - Q,,-1 (T1 =a1), the Tn are independent, with the same distribution A (say) for T2, T3,. . ..In the so-called zero-delayed case, the distribution Al of T1 is A as well. Adifferent important possibility is Al to be the stationary delay distribution A°with density A(x)/µA. Then the arrival process is stationary which could bea reasonable assumption in many cases (for these and further basic facts fromrenewal theory, see A.1).
We use much of the same notation as in Chapter I. Thus the premium rateis 1, the claim sizes U1, U2,... are i.i.d. with common distribution B, {St} is theclaim surplus process given by I.(1.7), with
Nt = # {n: Un <t}
the number of arrivals before t, and M is the maximum of {St}, r(u) the timeto ruin. The ruin probability corresponding to the zero-delayed case is denotedby 1/'(u), the one corresponding to the stationary case by 00)(u), and the onecorresponding to T1 = s by 1/i8 (u).
Proposition 1.1 Define p = !µ-B. Then no matter the distribution Al of T1iAA
lim St = lim ESt= p - 1,
t-*oo t t-ioo t
lim Var(St) = 11Ba2A + I4AaBt goo t PA
131

132 CHAPTER V. RENEWAL ARRIVALS
Furthermore for any a > 0,
lim E [St+a - St] = a(p - 1).t 4oo
Proof Obviously,
Nt
ESt = E E UI Nt -t = ENt•pB - t.
However , by the elementary renewal theorem (cf. A.1) ENt/t -+ 1/µA. From
this ( 1.1) follows , and (1 . 3) follows similarly by Blackwell 's renewal theorem,
stating that E[Nt+a - Nt] -* a/PA.
For (1 .2), we get similarly by using known facts about ENt and Var Nt that
Nt Nt
Var(St) = Var E U; Nt + EVar U;
= Var(PBNt) + E(4Nt)Q2
0`2A2tpB s + tB + o(t).
µA PA
Nt
0
Of course, Proposition 1.1 gives the desired interpretation of the constant pas the expected claims per unit time. Thus, the definition 77 = 1/p - 1 of thesafety loading appears reasonable here as well.
The renewal model is often referedd to as the Sparre Andersen process, after
E. Sparre Andersen whose 1959 paper [7] was the first to treat renewal assump-tions in risk theory in more depth. The simplest case is of course the Poissoncase where A and Al are both exponential with rate 0. This has a direct phys-ical interpretation (a large portfolio with claims arising with small rates andindependently). Here are two special cases of the renewal model with a similardirect interpretation:
Example 1.2 (DETERMINISTIC ARRIVALS) If A is degenerate, say at a, one
could imagine that the claims are recorded only at discrete epochs (say each
week or month) and thus each U,a is really the accumulated claims over a period
of length a. q
Example 1 .3 (SWITCHED POISSON ARRIVALS) Assume that the process has
a random environment with two states ON, OFF, such that no arrivals occur in
the off state, but the arrival rate in the ON state is ,0 > 0. If the environment
is Markovian with transition rate A from on to off and u from OFF to ON, the

1. INTRODUCTION 133
interarrival times become i.i.d. (an arrival occurs necessarily in the ON state,and then the whole process repeats itself). More precisely, A is phase-type(Example 1.2.4) with phase space {oN,oFF}, initial vector (1 0) and phasegenerator
11
However, in general the mechanism generating a renewal arrival process ap-pears much harder to understand. Therefore, the relevance of the model hasbeen questioned repeatedly, and the present author agrees to a large extent tothis criticism. However, we feel it reasonable to present at least some basicfeatures of the model, if for nothing else then for the mathematical elegance ofthe subject, the fundamental connections to the theory of queues and randomwalks, and for historical reasons.
The following representation of the ruin probability will be a basic vehiclefor studying the ruin probabilities:
Proposition 1.4 The ruin probabilities for the zero-delayed case can be rep-
resented as 0(u) = P(M(d) > u) where M(d) = Max {Snd) : n = 0,1,...} with
{S(d)} a discrete time random walk with increments distributed as the indepen-
dent difference U - T between a claim U and an interarrival time T.
Proof The essence of the argument is that ruin can only occur at claim times.The values of the claim surplus process just after claims has the same distri-
bution as {Snd^ }• Since the claim surplus process {St} decreases in between
arrival times, we have
o<t<oo n=0,1,...
From this the result immediately follows. q
For later use, we note that the ruin probabilities for the delayed case T1 = scan be expressed as in terms of the ones for the zero-delayed case as
fou+8
u + s - y)B(dy). (1.4)z/i8(u) = B(u + s) + '(
Indeed, the first term represents the probability F(U1 - s > u) of ruin at thetime s of the first claim whereas the second is P(r(u) < oo, U1 - s < u), asfollows easily by noting that the evolution of the risk process after time s isthat of a renewal risk model with initial reserve U1 - s. For the stationary case,integrate (1.4) w.r.t. Ao.
max St = max ^d^.S

134 CHAPTER V. RENEWAL ARRIVALS
2 Exponential claims. The compound Poissonmodel with negative claims
We first consider a variant of the compound Poisson model obtained essentiallyby sign-reversion . That is , the claims and the premium rate are negative sothat the risk reserve process , resp . the claim surplus process are given by
Nt Nt
Rt = u+^U; -t, St = t - Ut,b=1 !=1
where {Nt } is a Poisson process with rate ,3* (say ) and the U, are independentof {Nt} and i . i.d. with common distribution B* (say ) concentrated on (0, 00).A typical sample path of {Rt } is illustrated in Fig. 2.1.
U
Figure 2.1 r* (u)
One situation where this model is argued to be relevant is life annuities.The initial reserve is obtained by pre-payments from the policy holders, eachof which receive a payment at constant rate during the lifetime . At the time ofdeath , the remaining part of the pre-payment (if any ) is made available to thecompany.
Using Lundberg conjugation , we shall be able to compute the ruin probabil-ities i(i* (u) for this model very quickly (,0* (u) = P (rr* (u) < oo) where rr* (u) =inf It > 0: Rt < 0} ) . A simple sample path comparison will then provide uswith the ruin probabilities for the renewal model with exponential claim sizedistribution.
Theorem 2 .1 If,3*pB. < 1, then 0 * (u) = 1 for all u > 0. If ,a*PB• > 1, then0*(u) = e -'r" where ry > 0 is the unique solution of
0 = k*(-ry) = *(B*[-ry] - 1) +ry. (2.1)

2. EXPONENTIAL OR NEGATIVE CLAIMS 135
[Note that r.* (a) = log Ee-'st I.Proof Define
St =u - Rt, St=Rt-u=-St.
Then { St } is the claim surplus process of a standard compound Poisson risk
process with parameters 0*, B*. If I3*pB* < 1, then by Proposition 111.1.2
sup St = -inf St = 00t>o t>o
and hence -0* (u) = 1 follows.
(a) is*(a)
-7
(b) ,(a)
Figure 2.2
Assume now ,3*,UB. > 1 . Then the function k* is defined on the whole of(-oo, 0) and has typically the shape on Fig. 2.2(a). Hence -y exists and isunique. Let
B(dx) = ^e-7x B*(dx),B* [-7]
and let {St} be a compound Poisson risk process with parameters ,0, B. Then
the c.g.f. of {St} is c(a) = is*(a-7), cf. Fig. 2.2(b), and the Lundberg conjugate
of {St} is { St } and vice versa. Define
T_ (u) = inf It > 0 : St = -u} , T_ (u) = inf { t > 0 : St = -u 'r* (u).
Since ic'(0) < 0, the safety loading of {St} is > 0. Hence T_(u) < oo a.s., andthus
1 = P(T- (u ) < oo) = E {e-7sr_ (u); T_ ( u) < 001
e7"P(T_ (u) < oo) = e"V)* (u).
0
Now return to the renewal model.

136 CHAPTER V. RENEWAL ARRIVALS
Theorem 2 .2 If B is exponential, with rate S (say), and 5PA > 1, then ,)(u) _1r+e-7" where ry > 0 is the unique solution of
1 = Ee'Y(u-T ) = S 8 A[- Y] (2.2)7
and7r+=1-
Proof We can couple the renewal model {St} and the compound Poisson model{St*} with negative claims in such a way the interarrival times of {St*} are
To ,,Ti = U1, T2 = U2..... Then B* = A, 3* = 6, and (2 . 1) means that
8(A[-ry] - 1) + ry = 0 which is easily seen to be the same as (2.2).Now the value of {St*} just before the nth claim is
To +T1* +...+Tn -U1 Un,
and from Fig . 2.1 it is seen that ruin is equivalent to one of these values being> u. Hence
M* = max St = max {To + Ti + • • • + Tn - Ui - • • • - Un }t>0 n=0,1,...
To + max {Ul+•••+Un-TI-.•.-Tn}n=0,1,...
To + M(d)
in the notation of Proposition 1.4.Taking m.g.f.'s and noting that V)*(u) = P(M* > u) so that Theorem 2.1
means that M* is exponentially distributed with rate ry, we get
Ee'M(d) = Ee°M* _ -Y/(-- a) = 1 - 7r+ 7rEe-To b/(S-a) + +,Y -a
I.e., the distribution of M(d) is a mixture of an atom at zero and an exponentialdistribution with rate parameter ry with weights 1 - u+ and lr+, respectively.Hence P(M(d) > u) _ 1r+e-'r". q
A variant of the last part of the proof, which has the advantage of avoidingtransforms and leading up to the basic ideas of the study of the phase-type casein VIII.4 goes as follows: define 7r+ = P(M(d) > 0) and consider {St*} only
when the process is at a maximum value. According to Theorem 2.1, the failurerate of this process is y. However, alternatively termination occurs at a jumptime (having rate 8), with the probability that a particular jump time is notfollowed by any later maximum values being 1 - Tr+, and hence the failure rate

3. CHANGE OF MEASURE VIA EXPONENTIAL FAMILIES 137
is b(1- 7r+). Putting this equal to -y, we see that ry = 6(1- 7r+) and hence r+ =1- -y/b. However, consider instead the failure rate of M(d) and decompose M(d)into ladder steps as in II.6, 111.2. The probability that the first ladder step isfinite is 7r+. Furthermore, a ladder step is the overshoot of a claim size, henceexponential with rate b. Thus a ladder step terminates at rate b and is followedby one more with probability 7r+. Hence the failure rate of M(') is 6(1 - 7r+)= ry and hence P(M(d) > u) = P(M(d) > 0)e-7u = 7r+e-'r". 0
3 Change of measure via exponential families
We shall discuss two points of view, the imbedded discrete time random walkand Markov additive processes.
3a The imbedded random walk
The key steps have already been carried out in Corollary 11.4.5, which statesthat for a given a, the relevant exponential change of measure corresponds tochanging the distribution F(d) of Y = U - T to
F(d)(x) = e-K^d^(«) ^x e"vFidi(dy)00
K(d) (a) = log F(d) [a] = log B[a] + log A[-a] .
It only remains to note that this change of measure can be achieved by changing
the interarrival distribution A and the service time distribution B to Aad^, resp.B^d) where
Aad> (dt) = ^[ a] A(dt), Bads (dx) = - - B(dx).
This follow since , letting P(d) refer to the renewal risk model with these changedparameters , we have
E«d'efl' = Bad> [a] Aad> [-Q] = B[a +,3] A[-a -)3]B[a] A[-a]
F(d) [a +)3]= Fad) [^]
F(d) [a]
Letting
M(u) = inf in = 1,2.... : S(d) > u}

138 CHAPTER V. RENEWAL ARRIVALS
be the number of claims leading to ruin and
^(u) u = SM(u) - u
the overshoot , we get:
Proposition 3.1 For any a such that k(d)' (a) > 0,
O(u) = e-auE(d)e-a{ (u)+M(u)K (d)(a) .
Consider now the Lundberg case, i .e. let 7 > 0 be the solution of r. (d) (7) _
0. We have the following versions of Lundberg 's inequality and the Cramer-Lundberg approximation:
Theorem 3 .2 In the zero-delayed case,
(a) '(u) < e-ryu,(b) V)(u) - Ce-"u where C = limu.,,. E(d)e -1' (u), provided the distribution
F of U - T is non-lattice.
Proof Proposition 3.1 implies
Cu) = e-«uE ( 7d)e-«^(u) ,
and claim (a) follows immediately from this and e (u) > 0. For claim (b), just
note that F7(d) is non-lattice when F is so . This is known to be sufficient for ^(O)
to be non-lattice w.r.t. ]p (d) ([APQ ] Proposition 3.2 p. 187) and thereby for ^(u)
to converge in distribution since p(yd) (r(0) < oo) = 1 because of r (d)' (-y) > 0.
It should be noted that the computation of the Cramer-Lundberg constantC is much more complicated for the renewal case than for the compound Poisson
case where C = (1 - p)/($B'[7] - 1) is explicit given 7. In fact, in the easiestnon-exponential case where B is phase-type, the evaluation of C is at the samelevel of difficulty as the evaluation of i/i(u) in matrix-exponential form, cf. VIII.4.
Corollary 3.3 For the delayed case Tl = s, ik.(u) - C8e-7u where Cs =
Ce-78B[7]. For the stationary case, 00)(u) - C(°)e-ryu where
C(O) = C0[7] - 1).7µA

3. CHANGE OF MEASURE VIA EXPONENTIAL FAMILIES 139
Proof Using (1.4), B(x) = o(e-7x) and dominated convergence, we get
e"8(u)ru+8
e7uB(u + s) + J e7(v-8)e7(u+8-v), (u + s - y) B(dy)0
--4 0 + L00
For the stationary case, another use of dominated convergence combined withAo[s] = (A[s] -1)/SPA yields
00e7u,(°) (u) e7u iP8(u) Ao(ds) -+ f Ce-8B[7] Ao(ds)
0
= CB['Y](A[-y] - 1) = C(O).
IPA
0
Of course, delayed version of Lundberg's inequality can be obtained in a
similar manner . The expressions are slightly more complicated and we omit thedetails.
3b Markov additive processes
We take the Markov additive point of view of II.5. The underlying Markovprocess {Jt} for the Markov additive process {Xt} = {(Jt,St)} can be definedby taking Jt as the residual time until the next arrival. According to Remark11.5.9, we look for a function h(s) and a k (both depending on a) such thatGh,,(s, 0) = tc(a)h(s), where G is the infinitesimal generator of {Xt} = {(Jt, St)}and h,, (s, y) = e°yh(s). Let P8f E8 refer to the case Jo = s. For s > 0,
E8h0 (Jdt, Sdt) = h(s - dt )e-adt = h (s) - dt(ah (s) + h'(s))
so that Gha (s, 0) = -ah (s) - h'(s). Equating this to tch(s) and dividing byh(s) yields h'(s)/h(s) _ -a - /c,
h(s) = e-(a+x(a))8 (3.1)
(normalizing by h(0) = 1). To determine K, we invoke the behavior at theboundary 0. Here
1 = h«(0,0) = Eo[ha (Jdt,Sdt] = Ee'uh(T)
means
1 = f ' e°^B(dy) f ' h( s)A(ds),0 0

140 CHAPTER V. RENEWAL ARRIVALS
B[a]A[-a - rc(a)] = 1. (3.2)
As in 11.5, we can now for each a define a new probability measure Pa;s
governing {(Jt, St)}too by letting the likelihood ratio Lt restricted to Yt =
a((J,,,S„):0<v< )be
Lt = eaSt -tK(a) h(Jt) = east - tK(a)e- ( a+r' (a))(Jt -s)
h(s)
where c(a) is the solution of (3.2).
Proposition 3.4 The probability measure Pa;s is the probability measure gov-
erning a renewal risk process with Jo = s and the interarrival distribution A andthe service time distribution B changed to Aa, resp. Ba where
Aa (dt) - e-(«+k(a))t esyA(dt), Ba(dx) = -B(dx).
A[-a - c(a)] B[a]
Proof Pa;s(Jo = s) = 1 follows trivially from Lo = 1. Further, since JT, = J8 =
T2,
EaseAU1+6T2 = Ea [aAU1+6T2 LT
],
= E. [e1U1 +6T2ea ( U1-s)-stc (a)e-(a+K(a ))(T2-s)I
B[a +,13]A[b - a - rc(a)] = B[a + /3] A[b - a - rc(a)]
B[a] A[-a - c(a)]
= Ba[13]Aa[5],
which shows that U1, T2 are independent with distributions Ba, resp. Aa asasserted . An easy extension of the argument shows that U1, . . . , U,,, T2, ... J n+1
are independent with distribution Aa for the Tk and Ba for the Uk. q
Remark 3 .5 For the compound Poisson case where A is exponential with rate,8, (3.2) means 1 = B[a]/3/(/3+a+rc (a)), i.e. rc(a) = 0 (B[a] - 1)-a in agreement
with Chapter III. q
Note that the changed distributions of A and B are in general not the samefor Pa;s and P(d). An important exception is, however, the determination of theadjustment coefficient ry where the defining equations rc(d) (ry) = 0 and rc(ry) = 0
are the same.

4. THE DUALITY WITH QUEUEING THEORY 141
The Markov additive point of view is relevant when studying problems whichcannot be reduced to the imbedded random walk, say finite horizon ruin proba-bilities where the approach via the imbedded random walk yields results on theprobability of ruin after N claims, not after time T. Using the Markov additiveapproach yields for example the following analogue of Theorem IV.4.5
Proposition 3.6 Let y < let ay > 0 be the solution of ic'(ay) = 1/y,and define yy = ay - yx(ay). Then
"^ e-(ay+w(aY))8
Ys(u,yu) e-7vu = e-(aa+-(-r ))sb[a ]e-7yu
A[-ay - rc(ay)]L y1
In particular, for the zero-delayed case zp8(u, yu ) < e-7yu.
Proof As in the proof of Theorem IV.4.5, it is easily seen that ic(ay ) > 0. LetM(u) be the number of claims leading to ruin . Then J(rr(u)) = TM(u)+1 andhence
Ws(u, yu) = F'ay;s e-aysr(")+r(u ) K(ay) h(s) ; T(u) < yujh(JT(u))
< e-ayu+yuk(ay )Eia y Le-(a(+k(ay))s
v; -
(
ay+ray))TM(,.)+1e J
e-(ay+w(ay))8 e- -yyuAay [ay + K(ay) ,
which is the same as the asserted inequality for 0.(u, yu). The claim for the
zero-delayed case follows by integration w.r.t. A(ds). q
Notes and references The approach via the embedded random walk is stan-
dard, see e.g. [APQ] Ch. XII. For the approach via Markov additive processes, see in
particular Dassios & Embrechts [98] and Asmussen & Rubinstein [45].
4 The duality with queueing theory
We first review some basic facts about the GI/G/1 queue, defined as the singleserver queue with first in first out (FIFO; or FCFS = first come first served)queueing discipline and renewal interarrival times. Label the customers 1, 2, .. .and assume that T„ is the time between the arrivals of customers n - 1 and n,and U„ the service time of customer n. The actual waiting time Wn of customern is defined as his time spent in queue (excluding the service time), that is, thetime from he arrives to the queue till he starts service. The virtual waiting timeVt at time t is the residual amount of work at time t, that is, the amount of

142 CHAPTER V. RENEWAL ARRIVALS
time the server will have to work until the system is empty provided no new
customers arrive (for this reason often the term workload process is used) or,
equivalently, the waiting time a customer would have if he arrived at time t.Thus, since customer n arrives at time on, we have
Wn = Van- (4.1)
(left limit). The traffic intensity of the queue is p = EU/ET.
The following result shows that {Wn} is a Lindley process in the sense ofII.4:
Proposition 4.1 Wn+1 = (Wn + U. - Tn)+
Proof The amount of residual work just before customer n arrives is VQ„ -. It
then jumps to VQ„ - + Un, whereas in [On , an+1) = [on, on + Tn) the residual
work decreases linearly until possibly zero is hit, in which case {V} remains at
zero until time on+1. Thus Vos}1 _ = (Wn + Un - Tn)+, and combining with
(4.1), the proposition follows. 0
Applying Theorem 11.4.1, we get:
Corollary 4.2Let Mnd)
= maxk=o,...,n-1 (U1 +• • •+Uk -Tl - • • • Tk ). If W1 = 0,
then Wn v M.
The next result summarizes the fundamental duality relations between the
steady-state behaviour of the queue and the ruin probabilities (part (a) was
essentially derived already in 11.4):
Proposition 4.3 Assume rl > 0 or, equivalently, p < 1. Then:
(a) as n -+ oo, Wn converges in distribution to a random variable W, and we
haveP(W > u) = V, (u); (4.2)
(b) as t -* oo, Vt converges in distribution to a random variable V, and we have
P(V > u) = ?/iiol(u). (4.3)
Proof Part (a) is contained in Theorem 11.4.1 and Corollary 11.4.2, but we shallpresent a slightly different proof via the duality result given in Theorem II.3.1.
Let the T there be the random time UN. Then P(r(u) < T) is the probability
z/iiNi (u) of ruin after at most N claims, and obviously z/'(u) = limN-,"^ Vi(N) (u).
Also {Zt}o<t<T evolves like the left-continuous version of the virtual wait-ing time process up to just before the Nth arrival, but interchanging the set

4. THE DUALITY WITH QUEUEING THEORY 143
(T1,..., TN) with (TN,..., Ti) and similarly for the U,,. However, by an ob-vious reversibility argument this does not affect the distribution , and hence inparticular ZT is distributed as the virtual waiting time just before the Nth ar-rival, i.e. as WN. It follows that P(WN > u) =,(N)(u) has the limit tp(u) forall u, which implies the convergence in distribution and (4.2).
For part (b), we let T be deterministic . Then the arrivals of {Rt} in [0, T]form a stationary renewal process with interarrival distribution A, hence (sincethe residual lifetime at 0 and the age at T have the same distribution , cf. A.le)the same is true for the time-reversed point process which is the interarrivalprocess for { Zt}o<t<T• Thus as before , {Zt}o<t<T has the same distribution asthe left-continuous version of the virtual waiting time process so that
P(s)(VT > u) = P(s)(r(u) < T), (4.4)limT oF(s) (VT > u) = lim P(s) (r(u) < T) = '+^io) (u)•
0
It should be noted that this argument only establishes the convergence in
distribution subject to certain initial conditions, namely W1 = 0 in (a) and Vo =0, T1 - Ao in (b). In fact , convergence in distribution hold for arbitrary initialconditions , but this requires some additional arguments (involving regenerationat 0 but not difficult) that we omit.
Letting n oo in Corollary 4.2, we obtain:
Corollary 4.4 The steady-state actual waiting time W has the same distribu-tion as M(d).
Corollary 4.5 (LINDLEY'S INTEGRAL EQUATION) Let F(x) = P(U1-T1 < x),
K(x) = P(W < x). Then
K(x) = J x K(x - y)F(dy), x > 0. (4.5)00
Proof Letting n - oo in Proposition 4.1, we get W = (W + U* - T*)+, whereU*,T* are independent and distributed as U1, resp . T1. Hence for x > 0,conditioning upon U* - T* = y yields
K(x) = P ((W + U* - T*)+ < x) = P(W + U* - T* < x)
fK(x_y)F(dy)
(x > 0 is crucial for the second equality!). q
Now return to the Poisson case . Then the corresponding queue is M/G/1,and we get:

144 CHAPTER V. RENEWAL ARRIVALS
Corollary 4.6 For the M/G/1 queue with p < 1, the actual and the virtual
waiting time have the same distribution in the steady state. That is, W v V.
Proof For the Poisson case, the zero-delayed and the stationary renewal pro-cesses are identical. Hence '(u) = Ali(°)(u), implying P(W > u) = P(V > u)
for all u. 0
Notes and references The GI/G/1 queue is a favourite of almost any queueingbook (see e .g. Cohen [88] or [APQ] Ch. VIII), despite the fact that the extension fromM/G/1 is of equally doubtful relevance as we argued in Section 1 to be the case in risktheory. Some early classical papers are Smith [350] and Lindley [246].
Note that (4.5) looks like the convolution equation K = F * K but is not the same
(one would need (4.5) to hold for all x E R and not just x > 0). The equation (4.5)
is in fact a homogeneous Wiener-Hopf equation, see e.g. Asmussen [24] and references
there.

Chapter VI
Risk theory in a Markovianenvironment
1 Model and examples
We assume that arrivals are not homogeneous in time but determined by aMarkov process {Jt}0<t<oo with a finite state space E as follows:
• The arrival intensity is ,(3i when Jt = i;
• Claims arriving when Jt = i have distribution Bi;
• The premium rate when Jt = i is pi.
Thus, {Jt} describes the environmental conditions for the risk process. Theintensity matrix governing {Jt} is denoted by A = (A,,)iJEE and its stationarylimiting distribution by lr; here it exists whenever A is irreducible which isassumed throughout, and can be computed as the positive solution of WA = 0,Ire = 1. As in Chapter I, {St} denotes the claim surplus process,
N, t
St = E Ui - f pi, dv,
i=1 0
and r(u) = inf It > 0: St > u}, M = supt>o St. The ruin probabilities withinitial environment i are
'+ki(u) = pi(T(u) < oo) = Pi (M > u), Oj(u,T) = Pi (T(u) < T),
145

146 CHAPTER VI. MARKOVIAN ENVIRONMENT
where as usual Pi refers to the case Jo = i.Unless otherwise stated, we shall assume that pi = 1; this is no restric-
tion when studying infinite horizon ruin probabilities, cf. the operational timeargument given in Example 1.5 below.
We let
r► = P (1.1)Pi = /ji/AB;, P = E 7riPi,p
iEE
Then pi is the average amount of claims received per unit time when the en-
vironment is in state i, and p is the overall average amount of claims per unit
time , cf. Proposition 1.11 below.An example of how such a mechanism could be relevant in risk theory follows.
Example 1 .1 Consider car insurance, and assume that weather conditions play
a major role for the occurence of accidents. For example, we could distinguishbetween normal and icy road conditions, leading to E having two states n, i
and corresponding arrival intensities Qn, f3i and claim size distributions Bn, Bi;
one expects that 3i > on and presumably also that Bn # Bi, meaning that
accidents occuring during icy road conditions lead to claim amounts which are
different from the normal ones. Cl
The versatility of the model in terms of incorporating (or at least approxi-mating) many phenomena which look very different or more complicated at a
first sight goes in fact much further:
Example 1.2 (ALTERNATING RENEWAL ENVIRONMENT) The model of Exam-ple 1.1 implicitly assumes that the sojourn times of the environment in thenormal and the icy states are exponential, with rates Ani and Ain, respectively,which is clearly unrealistic. Thus, assume that the sojourn time in the icystate has a more general distribution A(i). According to Theorem A5.14, wecan approximate A(i) with a phase-type distribution (cf. Example 1.2.4) with
representation (E(i), a(i), T(=)), say. Assume similarly that the sojourn time in
the normal state has distribution A(n) which we approximate with a phase-typedistribution with representation (E('),a('),T(n)), say. Then the state space
for the environment is the disjoint union of E(n) and E(i), and we have f3, = iii
when j E E(i), /3 = Nn when j E E(n); in block-partitioned form, the intensity
matrix is
A OW-) T(i)T(n) t(n)a(i)
where t(n) = -T(n)e, t(i) = -T(')e are the exit rates. q

1. MODEL AND EXAMPLES 147
Example 1 .3 Consider again the alternating renewal model for car insurancein Example 1.2, but assume now that the arrival intensity changes during theicy period, say it is larger initially. One way to model this would be to take A(')to be Coxian (cf. Example VIII.1.4) with states i1, ... , iq (visited in that order)and letfOil >...>,3i,. q
Example 1 .4 (SEMI-MARKOVIAN ENVIRONMENT) Dependence between thelength of an icy period and the following normal one (and vice versa) can bemodelled by semi-Markov structure. This amounts to a family (A(")) ?CH Ofsojourn time distributions, such that a sojourn time of type rt is followed by oneof type c w.p. w,,, where W = (w,J017,tEH is a transition matrix . Approximating
each A('?) by a phase-type distribution with representation (E('l),a(n),T(n)),
say, the state space E for the environment is { ('q, i) : n E H, i E E(n) }, and
. T(1) +w11t(1)a(1) w12t (1)a(2)w21t(2)a(1) T(2) +w22t(2)a(2)
A =
wg1t(9)a(1) wg2t(9)a(2)
w1gt(1)a(9)
w2gt (2)a(q)
... T(9) +wggt(9)0, (9)
where q = CHI, t(n) = -T("i)e. The simplest model for the arrival intensityamounts to ,3,,,j = ,Q,, depending only on 77.
In the car insurance example, one could for example have H = {i1, i8f n1, n8},such that the icy period is of two types (long and short) each with their sojourntime distribution A('L), resp. A('^), and similarly for the normal period. Thenfor example wi,n, is the probability that a long icy period is followed by a shortnormal one. q
Example 1.5 (MARKOV-MODULATED PREMIUMS) Returning for a short while
to the case of general premium rates pi depending on the environment i, let
T
9(T) = f pi, dt, it = Je-l(t), St = SB-=(t).0
Then (by standard operational time arguments ) {St } is a risk process in a
Markovian environment with unit premium rate, and 1/ii(u) = t/ii(u). Indeed,the parameters are ^ij = aid/pi, Qi = ,3i/pi. q
From now on, we assume again pi = 1 so that the claim surplus is
Nt
St = ?Ui_t.1

148 CHAPTER VI. MARKOVIAN ENVIRONMENT
We now turn to some more mathematically oriented basic discussion. Thekey property for much of the analysis presented below is the following immediate
observation:
Proposition 1.6 The claim surplus process {St} of a risk process in a Marko-
vian environment is a Markov additive process corresponding to the parametersµi = -pi, o = 0, vi(dx) = ,(3iBi(dx), qij = 0 in the notation of Chapter 11.5.
In particular, the Markov additive structure will be used for exponential change
of measure and thereby versions of Lundberg's inequality and the Cramer-
Lundberg approximation.Next we note a semi-Markov structure of the arrival process:
Proposition 1.7 The Pi-distribution of T1 is phase-type with representation
(ei,A - (Qi)diag)• More precisely,
Pi (Ti E dx, JT1 = j) = Qj • e;e(A-(Oi)d'sg)xe, . dx.
Proof The result immediately follows by noting that T1 is obtained as the life-length of {Jt} killed at the time of the first arrival and that the exit rate obvi-
ously is f3j in state j. q
A remark which is fundamental for much of the intuition on the model con-
sists in noting that to each risk process in a Markovian environment, one can
associate in a natural way a standard Poisson one by averaging over the envi-
ronment. More precisely, we put
)3* = E 7fi/3i, B* = 1 /^* Bi.
iEE iEE )3
These parameters are the ones which the statistician would estimate if he ignoredthe presence of Markov-modulation:
Proposition 1.8 As t oo,
Nt
Nt a . )3*, N > 1(Ul < x) a4 B*(x).tl=1
Note that the last statement of the proposition just means that in the limit, the
empirical distribution of the claims is B*. Note also that (as the proof shows)
7ri/3i//3* gives the proportion of the claims which are of type i (arrive in state
i).

1. MODEL AND EXAMPLES 149
Proof Let ti = f1 I(JJ = i) ds be the time spent in state i up to time t and Nti)
the number of claim arrivals in state i . Then it is standard that ti lt '4' iri as
t -> oo. However , given {Jt}0<t<0., we may view Nt`i as the number of eventsin a Poisson process where the accumulated intensity at time t is Niti. Hence
Nt'> a ., ti) a.. ^j Nta 'y Ni)
Nt 7riNi,
t ti iEE
Also, denoting the sizes of the claims arriving in state i by U( ') 1 U(') thestandard law of large numbers yields
NN 1: I(Ukik < x)
a$.Bi(x), N -+ oo
k=1
Hence
1 Nt 1 N`+) NitsNt E I (Ut <- x) = Nt E > I (Uk) X) Nt Bi(x)1=1 iEE k=1 iEE
1: t5 Bi(x) = B*(x).
iEE
13
A different interpretation of B* is as the Palm distribution of the claim size,cf. Example 11.6.4.
The next result shows that we can think of the averaged compound Poissonrisk model as the limit of the Markov-modulated one obtained by speeding upthe Markov-modulation.
Proposition 1.9 Consider a Markov-modulated risk process {St} with param-
eters Ni, Bi, A, and let {St°i} refer to the one with parameters Pi, Bi, aA,
{St} to the compound Poisson model with parameters 0*, B*. Then {St-)}
+ {St*} in D[0, oo) as a -4 oo. In particular, zli( (u) .. i,* (u) for all u.
Proof According to Proposition 1.7, the Fi-distribution of T1 in {St(a ) } is phase-
type with representation (E, e;,aA - (/3i)aiag). By Proposition A5.2, this con-verges to the exponential distribution with rate 0* as a -* oo, and furthermorein the limit JT, has distribution (7ri)3i //3*)iEE and is independent of Ti. In par-ticular, the limiting distribution of the first claim size U1 is B*. Conditioning

150 CHAPTER VI. MARKOVIAN ENVIRONMENT
upon FT, shows similarly that in the limit (T2, U2) are independent of .FT,, with
T2 being exponential with rate ,l3* and U2 having distribution B*. Continuing
in this manner shows that the limiting distribution of (T,,, U,,),,=1,2.... is as in{St }. From this the convergence in distribution follows by general facts on weakconvergence in D[0, oo), which also yield O(a) (u, T) -+ ?P* (u; T) for all u and T.
The fact that indeed 0(a) (U) -3 0* (u) follows, e.g., from Theorem 3.2.1 of [145].0
Example 1.10 Let
E_{1,2}, A= ( -a -a )
\ a a J9 3 2
a1=2, B1=3E3+2E7,5 5
132=2, B2=1E3+4E7,5 5
where E5 denotes the exponential distribution with intensity parameter 5 anda > 0 is arbitrary. That is, we may imagine that we have two types of claimssuch that the claim size distributions are E3 and E7. Claims of type E3 arrivewith intensity 2 - s = o in state 1 and with intensity 1 - s = 1o in state 2,those of type E7 with intensity z s = 5 in state 1 and with intensity z . s 5in state 2. Thus, since E3 is a more dangerous claim size distribution than E7(the mean is larger and the tail is heavier), state 1 appears as more dangerousthan state 2, and in fact
9 3 1 2 1 81P1 = 31AB1 = ( '2 5 3 5 7 70
3 1 1 4 1 19P2 = ,31µB =
_2 2 5 3 5 7 70
Thus in state 1 where p, > 1, the company even suffers an average loss, and (atleast when a is small such that state changes of the environment are infrequent),the paths of the surplus process will exhibit the type of behaviour in Fig. 1.1with periods with positive drift alternating with periods with negative drift; theoverall drift is negative since it = (2 2) so that p = 71P1 + 112P2 = 7. On Fig.1.1, there are p = 2 background states of {Jt}, marked by thin, resp. thick, lines
in the path of {St}.Computing the parameters of the averaged compound Poisson model, we
first get that3
(3* = 2.29 +2 2 = 3.

1. MODEL AND EXAMPLES 151
Figure 1.1
Thus, a fraction r, 01 /,3* = 3/4 of the claims occur in state 1 and the remainingfraction 1/4 in state 2. Hence
B* = 415E3+5E7/ +4(
51E3 +5 E7) = 1E3 +2E7.
That is, the averaged compound Poisson model is the same as in III.(3.1). 0
The definition (1.1) of the safety loading is (as for the renewal modelin Chapter V) based upon an asymptotic consideration given by the followingresult:
Proposition 1.11 (a) ESt/t -* p - 1, t -* oo;(b) St/t -* p - 1 a.s., t -+ oo.
Proof In the notation of Proposition 1.8, we have
E[St + t I (t(i))iEEI = E t(i)OW = t(i)Pi•iEE iEE
Taking expectations and using the well -known fact Et(i)/t -* 7ri yields (a). For(b), note first that EN Uk')/N a4' µgi. Hence
St + t(i)
NtNti)
1 U(i)'= t k
N(i) E-4 1: 7riQi µs; = P.
iEE t k=1 iEE

152 CHAPTER VI. MARKOVIAN ENVIRONMENT
Corollary 1.12 If 77 < 0, then M = 00 a.s ., and hence 1/ii(u ) = 1 for all i and
u. If 77 > 0, then M < oo a.s., and ,0i(u) < 1 for all i and u.
Proof The case 77 < 0 is trivial since then the a .s. limit p - 1 of St / t is > 0, and
hence M = 00. The case 77 > 0 is similarly easy . Now let r) = 0, let some state
i be fixed and define
w=wl=inf{t >0:Jt_#i,Jt=i}, w2=inf {t>w1:Jt_#i,Jt=i},
X 1 =Sty,, X2 =SW2 -So,,,
and so on. Then by standard Markov process formulas (e.g. [APQ], Theorem
II.4.2(a) p. 38) Eiw1 = -1/ir,\ i and
EiX1 J, PB,, dt - Eiw13Ei fo 'o
Eiw • E ^ifjµs; - 1jEE
= (p - 1)Eiw = 0.
Now obviously the w,a form a renewal process , and hence wn /n a4. Eiw. Since
the X„ are independent , with X2, X3, ... having the Pi-distribution of X, also
SWn ](1 + ... + Xna . EiX = 0.
n n
Thus {SWn l is a discrete time random walk with mean zero, and hence oscillates
between -0o and oo so that also here M = oo. 0
Notes and references The Markov-modulated Poisson process has become very
popular in queueing theory during the last decade, see the Notes to Section 7. In risktheory, some early studies are in Janssen & Reinhard [211], [302], [212], and a morecomprehensive treatment in Asmussen [16]. The mainstream of the present chapterfollows [16], with some important improvements being obtained in Asmussen [17] inthe queueing setting and being implemented numerically in Asmussen & Rolski [43].
Statistical aspects are not treated here. See Meier [258] and Ryden [314], [315].There seems still to be more to be done in this area.
Proposition 1.1 and the Corollary are standard. The proof of Proposition 1.1(b)
is essentially the same as the proof of the strong law of large numbers for cumulative
processes, see [APQ] p. 136 or A.ld.
2 The ladder height distribution
Our mathematical treatment of the ruin problem follows the model of Chap-ter III for the simple compound Poisson model, and involves a version of the

2. THE LADDER HEIGHT DISTRIBUTION 153
Pollaczeck-Khinchine formula (see Proposition 2.2(a) below ) where the ladderheight distribution is evaluated by a time reversion argument.
Define the ladder epoch T+ by T+ = inf It : St > 0} = r(0), let
G+(i,j;A) = Pt(ST+ E A,Jr+ =j, T+ < oo)
and let G+ be the measure-valued matrix with ijth element G+(i, j; •). Theform of G+ turns out to be explicit (or at least computable), but is substantiallymore involved than for the compound Poisson case . However , by specializingresults for general stationary risk processes (Theorem II .6.5; see also ExampleII.6.4) we obtain the following result , which represents a nice simplified formof the ladder height distribution G+ when taking certain averages : starting{Jt} stationary, we get the same ladder height distribution as for the averagedcompound Poisson model, cf. the definition of ,6*, B* in Section 1.
Proposition 2.1 irG+(dy)e =,3*B*(y)dy.
For measure-valued matrices, we define the convolution operation by thesame rule as for multiplication of real-valued matrices, only with the product ofreal numbers replaced by convolution of measures. Thus, e.g., G+ is the matrixwhose ijth element is
E G+(i, k; •) * G+(k,j; •)•kEE
Also, IIG+ II denotes the matrix with ijth element
IIG+(i, j; •) II = JG+(i,i;dx).
Let further R denote the pre-T+ occupation kernel,
ZI(StT
R(i, j;A) = E;EA,Jt=j)dt,
and S (dx) the measure-valued diagonal matrix with /3 Bj(dx) as ith diagonalelement.
Proposition 2.2 (a) The distribution of M is given by
00
1 - a/i;(u) = Pi(M < u) = e' E G+ (u)(I - IIG+II)e. (2.1)n=0
J R(dx)S((y0
(b) G+ (y, oo) = - x, oo)). That is, for i,j E E,ao
0
G+(i, j; (y, oo)) = f R(i, j; dx)/jBj(y - x). (2.2)00

154 CHAPTER VI. MARKOVIAN ENVIRONMENT
Proof The probability that there are n proper ladder steps not exceeding x andthat the environment is j at the nth when we start from i is e ;
G+(x)ej, and
the probability that there are no further ladder steps starting from environment
j is e^ (I - IIG+II)e. From this (2.1) follows by summing over n and j. The
proof of (2.2) is just the same as the proof of Lemma 11.6.3. q
To make Proposition 2.2 useful , we need as in Chapters II, III to bring R and
G+ on a more explicit form . To this end , we need to invoke the time-reversed
version {Jt } of {Jt} ; the intensity matrix A* has ijth element
* 7r^i3
7ri
and we have
Pi(JT = j) = 7rj P2(JT = i)- (2.3)7ri
We let {St*} be defined as {St}, only with {Jt} replaced by {Jt } (the /3i and
Bi are the same), and let further {my} be the E-valued process obtained by
observing {Jt } only when {St*} is at a minimum value. That is, mx = j when
for some (necessarily unique) t we have St = -x, JJ = j, St < S* for u < t; see
Figure 2.1 for an illustration in the case of p = 2 environmental states of {Jt},
marked by thin, resp. thick, lines in the path of {St}.
0
x
----------------------------
Figure 2.1
The following observation is immediate:
Proposition 2.3 When q > 0, {mx} is a non-terminating Markov process on
E, hence uniquely specified by its intensity matrix Q (say).

2. THE LADDER HEIGHT DISTRIBUTION 155
Proposition 2.4 Q satisfies the non-linear matrix equation Q = W(Q) where
TS(dx)
0
co(Q) = n* - (/3i)diag + eQx,
and S(dx) is the diagonal matrix with the f3iBi(dx) on the diagonal. Further-
more, the sequence {Q(n)} defined by
Q(O) = A* - (/3i)diag,Q(n+l) _
^,(Q(n))
converges monotonically to Q.
Note that the integral in the definition of W(Q) is the matrix whose ith row isthe ith row of
_ 3 e2Bi(dx).f
Proof The argument relies on an interpretation in terms of excursions. Anexcursion of {St*} above level -x starts at time t if St = -x, {S,*, } is a minimumvalue at v = t- and a jump (claim arrival) occurs at time t, and the excursionends at time s = inf {v > t : S;, = -x}. If there are no jumps in (t, s], we saythat the excursion has depth 0. Otherwise each jump at a minimum level duringthe excursion starts a subexcursion, and the excursion is said to have depth 1if each of these subexcursions have depth 0. In general, we recursively definethe depth of an excursion as 1 plus the maximal depth of a subexcursion. Thedefinitions are illustrated on Fig. 2.2 where there are three excursions of depth1,0,2. For example the excursion of depth 2 has one subexcursion which is ofdepth 1, corresponding to two subexcursions of depth 0.
0
mms1-
^O \ -----------------------------T.Figure 2.2

156 CHAPTER VI. MARKOVIAN ENVIRONMENT
Let p=7) be the probability that an excursion starting from Jt = i has depth
at most n and terminates at J8 = j and pij the probability that an excursion
starting from Jt = i terminates at J8 = j. By considering minimum values
within the excursion , it becomes clear that
pij = r[eQh] ij Bi (dy) • (2.4)
0
To show Q = cp(Q), we first compute qij for i $ j. Suppose mx = i. Then
a jump to j (i.e., mx+dx = j) occurs in two ways , either due to a jump of {Jt }
which occurs with intensity A= j, or through an arrival starting an excursion
terminating with J, = j. It follows that qij = A;j +/3ipij. Similarly,
Fi(mh =i) = 1 + =h-flh+Qihpii+o(h)
implies qii = 'iii -/i +)3ipii. Writing out in matrix notation , Q = W(Q) follows.
Now let {m ( n) } be {mx } killed at the first time i7n (say) a subexcursion of
depth at least n occurs . It is clear that { mini } is a terminating Markov process
and that { mio) } has subintensity matrix A* - (01)diag = Q. The proof of
Q = W(Q) then immediately carries over to show that the subintensity matrix
of {mil) } is cp (Q(o)) = Q(l). Similarly by induction , the subintensity matrix
of {min+i ) } is cp (Q(n)) = Q(n+l) which implies that
qgj +1) = \!- - Qi + )%pij)
Now just note thatp1^)
t pij and insert (2.4). q
Define a further kernel U by f
-AU(i,j; A) = f Pi(mx = j) dx eie4xej dx (2.5)
A
(note that we use -A = {x : -x E Al on the r.h.s. of the definition to make U
be concentrated on (-co, 0)).
Theorem 2 .5 R(i, j; A) = L' U(j, i; A).7rE
Proof We shall show that
Fi(Jt=j, StEA ,T+>t) _ ^iF (JJ =i,St EA,St <S*,u< t), (2.6)7ri

2. THE LADDER HEIGHT DISTRIBUTION 157
from which the result immediately follows by integrating from 0 to oo w.r.t. dt.To this end, consider stationary versions of {Jt}, {Jt }. We may then assume
Ju=Jt-u, S;,=StSt-.,0<u<t, and get
irPi(Jt =j, St EA,z+>t)
= P.,,(Jt=j,Jo=i,StEA,S„<0,0<u<t)
= P. (Jo = j, Jt = i, St E A, St < St U, 0 < u < t)
= 7rjPj(Jt =i,St EA,St <Su, 0<u<t),
and this immediately yields (2.6). q
It is convenient at this stage to rewrite the above results in terms of thematrix K = 0-'Q'A, where A is the diagonal matrix with 7r on the diagonal:
Corollary 2.6 (a) R(dx) = e-Kxdx, x < 0;
(b) for z > 0, G+((z, oo)) = f o' eIXS((x + z, oo))dx;(c) the matrix K satisfies the non-linear matrix equation K = W(K) where
W(K) = A - (fii)diag + J "O eKx S(dx);0
(d) the sequence {K(n)} defined by K(o) = A - (,Qi)diag, K(n+1) = cp (K(n))
converges monotonically to K. ``
[the W(•) here is of course not the same as in Proposition 2.4].From Qe = 0, it is readily checked that 7r is a left eigenvector of K corre-
sponding to the eigenvalue 0 (when p < 1), and we let k be the corresponding
right eigenvector normalized by Irk = 1.
Remark 2.7 It is instructive to see how Proposition 2.1 can be rederived using
the more detailed form of G+ in Corollary 2.6(b): from 7rK = 0 we get
7rG+(dy)e = J W 7reKx(fiiBi(dy + x))diag dx • e0
f0w(fiiB1(dy + x))col dx
EirifiiBi(y)dy = fi*B*(y)dy•
iEE
0
Though maybe Corollary 2.6 is hardly all that explicit in general, we shallsee that nevertheless we have enough information to derive, e.g., the Cramer-Lundberg approximation (Section 3), and to obtain a simple solution in the

158 CHAPTER VI. MARKOVIAN ENVIRONMENT
special case of phase-type claims (Chapter VIII). As preparation, we shall giveat this place some simple consequences of Corollary 2.6.
Lemma 2 .8 (I - IIG+II)e = (1 - p)k.
Proof Using Corollary 2.6(b) with z = 0, we get
IIG+II = feIxsux, oo dx. (2.7)
In particular, multiplying by K and integrating by parts yields
T(eKx
0
KIIG+II = - I)S(dx)
S(dx) = K -A.= K - A + (,13i)diag - ZOO2.8)
0
Let L = (kir - K)-'. Then (k7r - K)k = k implies Lk = k. Now using (2.7),
(2.8) and ireKx = ir, we get
akirIIG+IIe = k f
o7rS((x , oo))e = k ( lri(3ips, ) rowe = pk,
0KIIG+IIe = Ke,
(kir-K)(I - IIG+II)e = k-Ke-pk+Ke = (1-p)k.
Multiplying by L to the left, the proof is complete. q
Here is an alternative algorithm to the iteration scheme in Corollary 2.6for computing K. Let IAI denote the determinant of the matrix A and d thenumber of states in E.
Proposition 2.9 The following assertions are equivalent:(a) all d eigenvalues of K are distinct;(b) there exist d distinct solutions 8 1 ,- .. , sd E {s E C : its < 0} of
(A + (131(Bi[s] - 1))diag - sIl = 0. (2.9)
I n that case , then Si, ... , sd are precisely the eigenvalues of K, and the corre-sponding left row eigenvectors al, ... , ad can be computed by
ai (A - (fi(Bi[Si] - 1))diag - siI) = 0. (2.10)

2. THE LADDER HEIGHT DISTRIBUTION 159
Thus,al seal
K= (2.11)
ad sdad
Proof Since K is similar to the subintensity matrix Q, all eigenvalues must
indeed be in Is E C : 2s < 0}.Assume aK = sa. Then multiplying K = W(K) by a to the left, we get
fsa = a (A
- (f3i)diag + eS(dx) = a (A - (/3i)diag + (/3iEi[s])diag)
It follows that if (a) holds, then so does (b), and the eigenvalues and eigenvectorscan be computed as asserted.
The proof that (b) implies (a) is more involved and omitted; see Asmussen
[16]. q
In the computation of the Cramer-Lundberg constant C, we shall also needsome formulas which are only valid if p > 1 instead of (as up to now) p < 1.
Let M+ denote the matrix with ijth entry
M+(i,j) = xG+(i,j;dx).0
Lemma 2 .10 Assume p > 1. Then IIG+II is stochastic with invariant probabil-
ity vector C+ (say) proportional to -irK, S+ _ -7rK/(-7rKe). Furthermore,
-irKM+e = p - 1.
Proof From p > 1 it follows that St a4' oo and hence IIG+II is stochastic.
That -7rK = -e'Q'0 is non-zero and has nonnegative components followssince -Qe has the same property for p > 1. Thus the formula for C+ followsimmediately by multiplying (2.8) by --7r, which yields -irKIIG+II = -irK.
Further
M+ = fdzfeS((x+z oo)) dx
dy fy eKx dx S((y, oo))0f00
0
mK-' f (eKy - I) S((y, oo))dy,0
00y(I - eKy) S((y, oo))e-7rKM+e = 7r f d
= lr(/3ipB;)diage - irIIG+Ile = p - 1

160 CHAPTER VI. MARKOVIAN ENVIRONMENT
(since IIG+II being stochastic implies IIG+ IIe = e). q
Notes and references The exposition follows Asmussen [17] closely (the proofof Proposition 2.4 is different). The problem of computing G+ may be viewed asa special case of Wiener-Hopf factorization for continuous-time random walks withMarkov-dependent increments (Markov additive processes); the discrete-time case issurveyed in Asmussen [15] and references given there.
3 Change of measure via exponential families
We first recall some notation and some results which were given in Chapter IIin a more general Markov additive process context. Define Ft as the measure-valued matrix with ijth entry Ft(i, j; x) = Pi[St < x; Jt = j], and Ft[s] as the
matrix with ijth entry Ft[i, j; s] = Ei[e8St; Jt = j] (thus, F[s] may be viewedas the matrix m.g.f. of Ft defined by entrywise integration). Define further
K[a] = A + ((3i(Bi[a] - 1)) - aIdiag
(the matrix function K[a] is of course not related to the matrix K of the
preceding section]. Then (Proposition 11.5.2):
Proposition 3.1 Ft[a] = etK[a]
It follows from II.5 that K[a] has a simple and unique eigenvalue x(a) withmaximal real part, such that the corresponding left and right eigenvectors VW,h(a) may be taken with strictly positive components. We shall use the normal-ization v(a)e = v(a)hi') = 1. Note that since K[0] = A, we have vi°> = 7r,
h(°) = e. The function x(a) plays the role of an appropriate generalization ofthe c.g.f., see Theorem 11.5.7.
Now consider some 9 such that all Bi[9] and hence ic(9), v(8), h(e) etc.are well-defined. The aim is to define governing parameters f3e;i, Be;i, Ae =
0!^1)i,jEE for a risk process, such that one can obtain suitable generalizationsof the likelihood ratio identitites of Chapter II and thereby of Lundberg's in-equality, the Cramer-Lundberg approximation etc.
According to Theorem 11.5.11, the appropriate choice is
e9x
09;i =13ihi[9], Bo;i (dx) = Bt[B ]Bi(dx),
Ae = AB 1K[9]De - r.(9)I
oB 1 ADe + (i3i(Bi[9] - 1))diag - (#c(9) + 9)I

3. CHANGE OF MEASURE VIA EXPONENTIAL FAMILIES 161
where AB is the diagonal matrix with h(e) as ith diagonal element . That is,
hie)DEB) _ ^Y' Me)
iii + /i(Bi[9] -1) - r. (9) - 0
i#j
i = j
We recall that it was shown in II .5 that Ae is an intensity matrix, that Eie°St h(o)
= etK(e)hEe ) and that { eest -t(e)h(9) } is a martingale.t>o
We let Pe;i be the governing probability measure for a risk process with
parameters ,69;i, B9 ; i, A9 and initial environment Jo = i. Recall that if PBT) is
the restriction of Pe ;i to YT = a {(St, Jt) : t < T} and PET) = PoT), then ]p(T)
and PET ) are equivalent for T < oo. More generally, allowing T to be a stoppingtime , Theorem II.2.3 takes the following form:
Proposition 3.2 Let r be any stopping time and let G E Pr, G C {r < oo}.
Then
1 exp {-BST + -rrc(0 ) }; GJ . (3.1)PiG = Po;iG = hE°) Ee;i lhj,)
Let F9;t[s], ice (s) and pe be defined the same way as Ft[s], c (s) and p, onlywith the original risk process replaced by the one with changed parameters.
Lemma 3.3 Fe;t [s] = e-t"(B) 0 -1 Ft[s + O]0.
Proof By II .(5.8). q
Lemma 3.4 rte (s) = rc(s+B) - rc(O). In particular, pe > 1 whenever ic'(s) > 0.
Proof The first formula follows by Lemma 3.3 and the second from Pe = rc'' (s).
Notes and references The exposition here and in the next two subsections (on
likelihood ratio identities and Lundberg conjugation) follows Asmussen [16] closely
(but is somewhat more self-contained).
3a Lundberg conjugation
Since the definition of c(s) is a direct extension of the definition for the classicalPoisson model, the Lundberg equation is r.(-y) = 0. We assume that a solution

162 CHAPTER VI. MARKOVIAN ENVIRONMENT
y > 0 exists and use notation like PL;i instead of P7;i; also, for brevity we writeh = h(7) and v = v(7).
Substituting 0 = y, T = T(u), G = {T(u) < oo} in Proposition 3.2, letting^(u) = S7(u) - u be the overshoot and noting that PL;i(T(u) < oo) = 1 byLemma 3.4, we obtain:
Corollary 3.5
-7uET he -7{(u)
( ) < T 2)(3L,iie) =V)i(u,; T u .,
eioi(u) = hie-7uE
h =(u)
-WO. (3.3)
hj,(„)
Noting that 6(u) > 0, (3.3) yields
Corollary 3.6 (LUNDBERG'S INEQUALITY) Oi(u) - < hi e--fu.
min2EE h9
Assuming it has been shown that C = limo, 0 EL;i[e-7^(u)/hj,(„j exists and isindependent of i (which is not too difficult, cf. the proof of Lemma 3.8 below),it also follows immediately that 0j(u) - hiCe-7u. However, the calculation ofC is non-trivial. Recall the definition of G+, K, k from Section 2.
Theorem 3 .7 (THE CRAMER-LUNDBERG APPROXIMATION) In the light-tailed
case , 0j(u) - hiCe-7u, where
C (PL -1) "Lk.(3.4)
To calculate C, we need two lemmas . For the first, recall the definition of(+, M+ in Lemma 2.10.
Lemma 3 .8 As u -4 oo, (^(u), JT(u)) converges in distribution w.r.t. PL;i, withthe density gj(x) (say) of the limit (e(oo), JT(,,,,)) at b(oo) = x, JT(oo) = j beingindependent of i and given by
gi (x) = L 1 L E CL;'GL (e,.1; (x, oo))S+M+e LEE
Proof We shall need to invoke the concept of semi-regeneration , see A.1f. In-
terpreting the ladder points as semi-regeneration points (the types being theenvironmental states in which they occur), {e(u),JJ(u))} is semi-regenerativewith the first semi-regeneration point being (^(0), JT(o)) _ (S,+, J,+). The for-mula for gj (x) now follows immediately from Proposition A1.7, noting that thenon-lattice property is obvious because all GL (j, j; •) have densities. q

3. CHANGE OF MEASURE VIA EXPONENTIAL FAMILIES 163
Lemma 3 .9 KL = 0-1K0 - ryI, G+[-ry] _ -111G+IIA, G+['y]h = h.
Proof Appealing to the occupation measure interpretation of K, cf. Corollary
2.6, we get for x < 0 that
ete-Kxej dx = fPs(StE dx,J =j,r > t)dt
= hie-7x f O PL;i(St E dx, Jt = j, T+ > t) dthj o
= ht e-7xe^e-K`xej dx,
which is equivalent to the first statement of the lemma. The proof of the secondis a similar but easier application of the basic likelihood ratio identity Proposi-tion 3.2. In the same way we get G+['y] = AIIG+IIT-1, and since IIG+ IIe = e,it follows that
G+[rylh = oIIG+IIo -1h = AIIG+ IIe = De = h.
Proof of Theorem 3.7 Using Lemma 3.8, we get
EL (e-'W-); JT(.) = jl = f 00 e- 7xgj (x) dxL J o
1 °°f e-7^G+(t, j; (x, oo)) dx
S+M+e LEE °
- 1 (+;l f0
1(1 - e-7x )G+(1,j; dx)S +M+e LEE 0
- 1 E(+(IIG+(e,j)II-G+[t,j;ry
rrS+M+e LEE
In matrix formulation, this means that
e-7f(-) 1 LC = EL;i - L L c+ (IIG+II - G+[-7]) 0-le
hj,r(_) ryC M e
LYC+M+e
(-ir KL) (I - G+[- y]) 0-le,'y(PL - 1)

164 CHAPTER VI. MARKOVIAN ENVIRONMENT
using Lemma 2.10 for the two last equalities. Inserting first Lemma 3.9 andnext Lemma 2.8, this becomes
1 7r LA -1(-YI - K)(I - IIG+II)e'Y(PL - 1)
= 1 P 7r LA -1(yI - K)k = 1-P 7rLO-1k.
Y(PL - 1) (PL - 1 )
Thus, to complete the proof it only remains to check that irL = vL A. The
normalization vLhL = 1 ensures vLOe = 1. Finally,
VLOAL = vLAA-'K['Y]A = 0
since by definition vLK[y] = k(y)vL = 0. q
3b Ramifications of Lundberg 's inequality
We consider first the time-dependent version of Lundberg 's inequality, cf. IV.4.
The idea is as there to substitute T = yu in 'Pi (u, T) and to replace the Lundbergexponent y by yy = ay - yk(ay ), where ay is the unique solution of
rc(ay)= 1Y
Graphically, the situation is just as in Fig. 0.1 of Chapter IV. Thus, one hasalways yy > y, whereas ay > -y, k(ay) > 0 when y < 1/k'(y), and ay < y,
k(ay) < 0 when y > 1/k'(-y).
Theorem 3 .10 Let C+°) (y) _1
ThenminiEE hiav)
1Vi(u,yu) C+°)(y)hiav) e-7vu,
y< (y)(3.6)
Pi(u) - V,i(u,yu) < C+)(y)hiar )e -'Yvu, y> (y) (3.7)
Proof Consider first the case y < Then, since k (ay) > 0, (3 .1) yields
'12(u,yu)
hiav)]E'iav,ih(ay )
exp {-ayST(,L) +r(u)k(ay)}; T(u) < yu
J*(u)

3. CHANGE OF MEASURE VIA EXPONENTIAL FAMILIES 165
hiav)e_avuE, av
'i [h,
exp {-e() + r(u))} ; r(u) yu
hiay)C+o)(y)e-avuEav;i [e*(u)K(av); r(u) < yu]
h=av)C+o) (y)e-ayu+yuw(av). 1
Similarly, if y > 1lk'(ry), we have ic(ay) < 0 and get
'i(u) - V)i(u, yu) f
h(av)e-avuE«v;i I (a) exp {-aye(u) + r(u)r.(ay)}; yu < r(u) < 00
hv
4(u)
< h(av)C+o)(y)e-avuEav ; i [eT(u)K(av ); yu < r(u) < 00]
< hiav)C+o)(y)e-avu+yuw(av)
0Note that the proof appears to use less information than is inherent in thedefinition (3.5). However, as in the classical case (3.5) will produce the maximalryy for which the argument works.
Our next objective is to improve upon the constant in front of a-7u in Lund-berg's inequality as well as to supplement with a lower bound:
Theorem 3.11 Let
C_ = min 1 • inf Bj (x)jEE hj x>o f2° e'r(v-x)Bj(dy) '
1 Bj(x) (3.8 )C+ _ mE hj suP
J e7( Y-x)Bj (dy)..00
Then for all i E E and all u > 0,
C-hie -ryu < Vi(u) < C+hie-7u. (3.9)
For the proof, we shall need the matrices G+ and R of Section 2. We furtherwrite G(u) for the vector with ith component Gi(u) = EiEE G+(i,j; (u, oo))
and, for a vector <p(u) = (cpi (u))iEE of functions , we let G+ * W(u) be the vectorwith ith component
^Pj(u - y)G+(z,.7; dy)•E(G+(i,j) * coj)(u) _ fo
ujEE iEE

166 CHAPTER VI. MARKOVIAN ENVIRONMENT
Lemma 3 .12 Assume sup1,u IMP:°) (u) I < oo, and define W(n+1) (u) = G(u) +
(G+ * tp(n))(u). Then cpin)(u) sit (u) as n -+ oo.
Proof Write UN = EN G+ , U = U". = Eo G+G. Then iterating the definingequation ip(n+1) = G + G+ * V(n) we get
W(N+1) = UN * G + G+N+1) * ^(o)
However, if r+ (n) is the nth ladder epoch, we have
G*(N+1) * ^,(0) ] (u) < sup Iv2°)(u)I Pi(rr+(N + 1) < oo) --+ 0.Jt t,u
Hence lim cp(n) exists and equals U * G. _To see that the ith component of U * G(u) equals ?Pi (u), just note that the
recursion <p(n+1) = G + G+ * (p(n) holds for the particular case where cpin)(u)is the probability of ruin after at most n ladder steps and that then obviously
cp2n) (u) -+ t,& (u), n -> oo. q
Lemma 3 .13 For all i and u,
00 fe(1tL)G+(i,j;dy).C_ hj f e(Y)G+(i, j; dy) : 1(u) < C+ > hj
u
0G+(i,7; dy) = aj f Bj(dy - x )R(i,j; dx).
00
Thus
C+ > hj f"o e7(Y-u)G+(i, j; dy)jEE u
0 00
C+ ijhj f R(i, j; dx) f e7(v-u)Bj (dy - x)jEE 00 u
//^^ //0 100 ery(&-u+x)Bj (dy)
C+E,3jhjf
R(i, j; dx)C. Bj(u - x)
jEE 00 Bj (u - x)
0
R(i, j; dx )Bj (u - x) = Gi(u),E Qj f°OjEE

3. CHANGE OF MEASURE VIA EXPONENTIAL FAMILIES 167
proving the upper inequality, and the proof of the lower one is similar. q
Proof of Theorem 3.13 Let first cp=°)(u) = C_ hie-"u in Lemma 3.13. We claim
by induction that then cpin) (u) > C_ hie-7u for all n, from which the lower
inequality follows by letting n -* oo. Indeed, this is obvious if n = 0, and
assuming it shown for n, we get
Wo n+1) (u) = ? 7 i ( U ) + E J u gyp;n) (u - y)G+(i, j; dy) (3.10)
jEE o
C_ 1 f hje7(y-u)G+(i, j; dy)jEE u
U+C_ hje7(y-u)G+(i, j; dy)
jEE""
C_e-7u 57 O+[i, j; y]hj = C_ e-7uhi, (3.11)jEE
estimating the first term in (3.10 ) by Lemma 3 . 13 and the second by the induc-tion hypothesis , and using Lemma 3 .9 for the last equality in (3.11).
The proof of the upper inequality is similar , taking cps°) (u) = 0. q
Here is an estimate of the rate of convergence of the finite horizon ruinprobabilities 'i (u, T) = Pi (7- (u) < T ) to 0i (u) which is different from Theorem3.10:
Theorem 3 . 14 Let yo > 0 be the solution of 'c'(yo ) = 0, let C+(yo) be as in
(3.8) with -y replaced by yo and hi by h=7o ), and let 8 = e'(70). Then
0 < Vi (u ) - 0i(u, T) < C+(')'o)hi7u)e-7ou8T . (3.12)
Proof We first note that just as in the proof of Theorem 3.11, it follows that
Vi(u) < C_(yo)h=70)e-7ou.
Hence , letting MT = maxo<t<T St, we have
(3.13)
Vii (u) - tpi(u,T) = Pi(M > u) - Pi(MT > u) = Pi(MT < u,M > u)
= Pi(ST<u,MT<u,M>u)
= Ei [VGJT (u - ST); MT < u, ST < u]< C+(yo)e-7ouEi [h^7o)e70ST1 -
l T J
h(7o)e-7ou8T .= C+i

168 CHAPTER VI. MARKOVIAN ENVIRONMENT
Notes and references The results and proofs are from Asmussen and Rolski [44].Further related discussion is given in Grigelionis [176], [177].
4 Comparisons with the compound Poisson mo-del
4a Ordering of the ruin functions
For two risk functions 0', ", we define the stochastic ordering by 0' < s.o. V)" if
z/i'(u) <'c""(u), u > 0. (4.1)
Obviously, this correponds to the usual stochastic ordering of the maximaM', M" of the corresponding two claim surplus proceses (note that 0'(u) _
P(M' > u), 0"(u) = P(M" > u))Now consider the risk process in a Markovian environment and define i' (u) _
>iEE irioi(u). It was long conjectured that -0* Vi,,, where o*(u) is the ruinprobability for the averaged compound Poisson model defined in Section 1 and,0,, is the one for the Markov-modulated one in the stationary case (the distri-bution of J0 is 7r). The motivation that such a result should be true came inpart from numerical studies, in part from the folklore principle that any addedstochastic variation increases the risk, and finally in part from queueing theory,where it has been observed repeatedly that Markov-modulation increases wait-ing times and in fact some partial results had been obtained. The results tobe presented show that quite often this is so , but that in general the picture ismore diverse.
The conditions which play a role in the following are:
,31:5)32 ... < ,3p. (4.2)
Bl <_s.o. B2 <_s.o.... <s.o. Bp. (4.3)
The Markov process {Jt} is stochastically monotone (4.4)
To avoid trivialities, we also assume that there exist i # j such that either
/3i <,33 or Bi 0 Bj. Occasionally we strengthen (4.3) to
B = Bi does not depend on i. (4.5)
Note that whereas (4.2) alone just amounts to an ordering of the states, this isnot the case for (4.3). For the notion of monotone Markov processes, we refer to

4. COMPARISONS WITH THE COMPOUND POISSON MODEL 169
Stoyan [352], Section 4.2; note that (4.4) is automatic in some simple exampleslike birth-death processes or p = 2 . Conditions (4.2)-(4.4) say basically thatif i < j , then j is the more risky state , and it is in fact easy to show thatVii(u ) < t/j(u) (this is used in the derivation of (4.9 ) below).
Theorem 4 .1 Assume that conditions (4.2)-(4.4) hold. Then V,*
For the proof, we need two lemmas. The first is a standard result goingback to Chebycheff and appearing in a more general form in Esary, Proschan &Walkup [140], the second follows from an extension of Theorem I1.6.5 (cf. alsoProposition 2.1) which with basically the same proof can be found in Asmussen& Schmidt [49].
Lemma 4 . 2 If al < ... < a,,, b1 < ... < bp and 7ri > 0 (i = 1, ... , p),^i 7ri = 1, then
P P P
1:7riaibi > E 7riai 7rjbj.
i=1 i=1 j=1
The equality holds if and only if a1 = ... = aP or b1 = ... = b,,.
Lemma 4 .3 (a) P,r (JT(o) = i, 7-(0) < oo) = pirf+), where 7r2+) = QiµBilri/p,(b) P,r (Sr(o) E dx Jr(o) = i, T(0) < oo) = Bi(x) dx/tcai .
Proof of Theorem 4.1. Conditioning upon the first ladder epoch, we obtain (cf.Proposition 2.1 for the first term in (4.7) and Lemma 4.3 for the second)
*(u) _ /3*B* (u) +,13* J u 0*(u - x)B*(x) dx, (4.6)0
fl*B*(u) + p>
u7r=
+)
fb (u - x)Bt (x) /pB, dx (4.7)
s=1 0
_ /3*B*(u) + f u 7ri,3iBi(x)YPi(u - x)dx (4.8)
^jB* ( )
/ ^ t=1
> + f u3* Tri/iBd(x) . E 7ri Wi(u - x) dx (4.9)o i=1 i=1
Q*B*(u)+,3* f uB(x) z/^,r(u -x)dx. (4.10)0
Here (4.9) follows by considering the increasing functions 3iBi (x) and Oi (u - x)
of i and using Lemma 4.2. Comparing (4.10) and (4.6), it follows by a standard

170 CHAPTER VI. MARKOVIAN ENVIRONMENT
argument from renewal theory that tk.., dominates the solution 0* to the renewalequation (4.6). q
Here is a counterexample showing that the inequality tp* (u) < V),, (u) is notin general true:
Proposition 4.4 Assume that ,3µi < 1 for all i, that
P P/^2 /^ /^
^i/ji pBi < 1il3i 1r1NiµBi
i=1 i=1 i=1`
(4.11)
and that A has the form eAo for some fixed intensity matrix A0. Then i/i*(u) <,0,r (u ) fails for all sufficiently small e > 0.
Proof Since 0..(0) = V,* (0), it is sufficient to show that 0',(0) < b*'(0) for esmall enough. Using (4.6), (4.8) we get
'*' (0) =
P P
-3* + /3*1* (0) _ > lri'3qqi • E 7i/ipBi - /3*,i=1 i=1
7'r(0) _ EFioiwi(0) - 0*•
i=1
But it is intuitively clear (see Theorem 3.2.1 of [145] for a formal proof) thatz/ii(u) converges to the ruin probability for the compound Poisson model withparameters ,3i, Bi as e J. 0. For u = 0, this ruin probability is /3iPBi, and fromthis the claim follows. q
To see that Proposition 4.4 is not vacuous, let
= ( 1/2 1/2 ) , 01 = 10-3, Q2 = 1, µB, = 102, µB2 = 10-4.
Then the l.h.s. of (4.11) is of order 10-4 and the r.h.s. of order 10-1.
Notes and references The results are from Asmussen, Frey, Rolski & Schmidt
[32]. As is seen, they are at present not quite complete. What is missing in relation
to Theorem 4.1 and Proposition 4.4 is the understanding of whether the stochastic
monotonicity condition (4.4) is essential (the present author conjectures it is).
4b Ordering of adjustment coefficients
Despite the fact that V)* (u) < *,, (u) may fail for some u, it will hold for allsufficiently large u, except possibly for a very special situation . Recall that

4. COMPARISONS WITH THE COMPOUND POISSON MODEL 171
the adjustment coefficient for the Markov-modulated model is defined as thesolution -y > 0 of ic(-y) = 0 where c(a) is the eigenvalue with maximal real partof the matrix A + (rci(a))diag where rci(a) = ai(Bi[a] - 1) - a. The adjustmentcoefficient -y* for the averaged compound Poisson model is the solution > 0 ofrc*(ry*) = 0 where
rc*(a) _ 13*(B*[a] - 1) - a = E irirci(a). (4.12)
iEE
Theorem 4.5 y < ry*, with strict inequality unless rci (y*) does not depend oniEE.
Lemma 4.6 Let (di)iEE be a given set of constants satisfying EiEE iribi = 0and define A(a) as the eigenvalue with maximal real part of the matrix A +
a(bi)diag• Then )t(a) > 0, with strict inequality unless a = 0 or bi = 0 for alli E E.
Proof Define
f &ids.X=
Then {(Jt, Xt)} is a Markov additive process (a so-called Markovian fluid model,cf. e.g. Asmussen [20]) as discussed in 11.5, and by Proposition II.5.2 we have
(Ei[e"X'; Jt = i])' EE = vA+n(6.)a..g.
Further (see Corollary 11.5.7) )i is convex with
A'(0) = limEXt
= 70i = 0, (4.13)t-ioo t
iEE
A„(O) iioo varXtt t
By convexity, (4.13) implies A(a) > 0 for all a.
(4.14)
Now we can view {Xt} as a cumulative process (see A.ld) with generic cycle
w = inf{t>0: Jt_54 k,Jt=kI A
(the return time of k) where k E E is some arbitrary but fixed state. It isclear that the distribution of X,, is non-degenerate unless bi does not dependon i E E, which in view of EiEE 1ibi = 0 is only possible if Si = 0 for all i E E.Hence if 5i 54 0 for some i E E, it follows by Proposition A1.4(b) that the limitin (4.14) is non-zero so that A"(0) > 0. This implies that A is strictly convex,in particular .(a) > 0 for all a 0 0. 0

172 CHAPTER VI. MARKOVIAN ENVIRONMENT
Proof of Theorem 4.5. Let bi = rci(y*), a = 1 in Lemma 4.6. Then > risi = 0because of (4.12) and rc*(y*) = 0. Further a(1) = rc(y*) by definition of A(.)and rc (•). Hence rc(y*) > 0. Since ic is convex with rc'(0) < 0 , this implies thatthe solution y > 0 of K(y) = 0 must satisfy y < y*. If rci(y* ) is not a constantfunction of i E E, we get rc (y*) > 0 which in a similar manner implies thaty < y*. q
Notes and references Theorem 4.5 is from Asmussen & O'Cinneide [40], improv-
ing upon more incomplete results from Asmussen, Frey, Rolski & Schmidt [32].
4c Sensitivity estimates for the adjustment coefficient
Now assume that the intensity matrix for the environment is Ae = Ao/e, whereasthe ,Qi and Bi are fixed . The corresponding adjustment coefficient is denoted byry(e). Thus -y(e) -* y* as e 10, and our aim is to compute the sensitivity
ayae E=O
A dual result deals with the limit a -4 oo. Here we put a = 1/e, note thaty(a) -+ mins=1,...,p yi and compute
8y8a a=0
In both cases, the basic equation is (A + (rci(y))diag)h = 0, where A, y, hdepend on the parameter (e or a).
In the case of e, multiply the basic equation by a to obtain
0 = (A0 + e(r£i(y))diag)h,
0 = ((ri(-Y))diag + ery (4{('Y))diag)h + (A0 + e(?i'Y))diag)h'. (4.15)
Normalizing h by 7rh = 0, we have 7rh' = 0, h(0) = e. Hence letting e = 0 in(4.15) yields
0 = (Ii(y*))diage + Aoh'(0) = (rci('Y*))diage + (Ao - eir)h'(0),
h'(0) = -(Ao - e7r)-1(Ici(Y*))diage. (4.16)
Differentiating (4.15) once more and letting e = 0 we get

5. THE MARKOVIAN ARRIVAL PROCESS 173
0 = 27'(0)(r-i(`Y *))diage + 2(ci('Y* ))diag h' (0) + Aoh" (0) , (4.17)0 = 27'(0)p+27r(rs;i(7' *))diagh'(0), (4.18)
multiplying (4.17) by 7r to the left to get (4.18). Inserting (4.16) yields
Proposition 4.7 8ryaE = 1 7r(ci ('Y*))diag (Ao -e7r)-1(Xi(-Y*))diage*=0 P
Now turn to the case of a. We assume that
0 < -y < 7i, i = 2, ... , p. (4.19)
Then 'y -► ryl as a ^ 0 and we may take h(0) = el (the first unit vector). Weget
0 = (aAo + ( lc&Y))diag)h,
0 = (Ao + ry'(ii(-Y))diag )h + (aAo + (Ki(7'))diag)h'. (4.20)
Letting a = 0 in (4.20) and multiplying by el to the left we get 0 = All +7'(0)rci (0) + 0 (here we used icl (ry(0)) = 0 to infer that the first component ofK[7(0)]h'(0) is 0), and we have proved:
Proposition 4.8 If (4.19) holds, then 8aa=o
Allrci (0)
Notes and references The results are from Asmussen, Frey, Rolski & Schmidt[32]. The analogue of Proposition 4.8 when ryi < 0 for some i is open.
5 The Markovian arrival process
We shall here briefly survey an extension of the model, which has recently re-ceived much attention in the queueing literature, and may have some relevancein risk theory as well (though this still remains to be implemented).
The additional feature of the model is the following:
• Certain transitions of {Jt} from state i to state j are accompanied by aclaim with distribution Bid; the intensity for such a transition (referred to
as marked in the following) is denoted by Aii l and the remaining intensity

174 CHAPTER VI. MARKOVIAN ENVIRONMENT
f o r a transition i -+ j by A . For i = j, we use the convention that
f3i where 3i is the Poisson rate in state i, that Bii = Bi , and thata1i =
the are determined by A = A(l ) +A(2) where A is the intensity matrixgoverning {Jt}.
Thus , the Markov-modulated compound Poisson model considered sofar corre-sponds to A(l) = (,6i ) diag, A(1) = A - (13i )diag, Bii = Bi ; the definition of Bij isredundant for i i4 j.
Note that the case that 0 < qij < 1, where qij is the probability that atransition i -* j is accompanied by a claim with distribution, is neither 0 or 1is covered by letting Bij have an atom of size qij at 0.
Again , the claim surplus is a Markov additive process (cf. II.4). The ex-tension of the model can also be motivated via Markov additive processes: if{Nt} is the counting process of a point process, then {Nt} is a Markov additiveprocess if and only if it corresponds to an arrival mechanism of the type justconsidered.
Here are some main examples:
Example 5 .1 (PHASE-TYPE RENEWAL ARRIVALS) Consider a risk process
where the claim sizes are i.i.d. with common distribution B, but the point pro-cess of arrivals is not Poisson but renewal with interclaim times having commondistribution A of phase-type with representation (v, T). In the above setting,we may let {Jt} represent the phase processes of the individual interarrival timesglued together (see further VIII.2 for details), and the marked transitions arethen the ones corresponding to arrivals. This is the only way in which arrivalscan occur, and thus
1i = 0, A(l) = T, A(l) = tv, Bij = B;
the definition of Bi is redundant because of f3i = 0. q
Example 5 .2 (SUPERPOSITIONS) A nice feature of the set-up is that it is
closed under superposition of independent arrival streams . Indeed, let { Jt 1) },
j(2) } be two independent environmental processes and let E(k), A(1'k) A(2 k1),
B;^) etc. refer to { Jt k) }. We then let (see the Appendix for the Kronecker
notation)
E = E(1) x E(2), Jt = (Jtl), Jt2))
A(1) = A(' 1) ® A(1;2), A ( 2) = A (2`1 ) (2;2)® A,

5. THE MARKOVIAN ARRIVAL PROCESS 175
Bij,kj = Bik) B13-4k = Bak)
(the definition of the remaining Bij,kl is redundant). In this way we can model,e.g., superpositions of renewal processes. q
Example 5 .3 (AN INDIVIDUAL MODEL) In contrast to the collective assump-tions (which underly most of the topics treated sofar in this book and lead toPoisson arrivals), assume that there is a finite number N of policies. Assume fur-ther that the ith policy leads to a claim having distribution Ci after a time whichis exponential, with rate ai, say, and that the policy then expires. This meansthat the environmental states are of the form i1i2 • • • iN with il, i2i ... E 10, 11,where ik = 0 means that the kth policy has not yet expired and ik = 1 that ithas expired. Thus, claims occur only at state transitions for the environment sothat
AN2... iN,1i2 ... iN = all BOi2... iN,1i2...iN C17
AilO...iN,iil...iN = a2, Bilo...iN,iil...iN = C27
All other off-diagonal elements of A are zero so that all other Bii are redundant.Similarly, all Al i2...iN are zero and all Bi are redundant. Easy modificationsapply to allow for
• the time until expiration of the kth policy is general phase-type ratherthan exponential;
• upon a claim, the kth policy enters a recovering state, possibly having ageneral phase-type sojourn time, after which it starts afresh.
Example 5 .4 (A SINGLE LIFE INSURANCE POLICY ) Consider the life insurance
of a single policy holder which can be in one of several states, E = { WORKING,
RETIRED, MARRIED, DIVORCED, WIDOWED, INVALIDIZED, DEAD etc.}. The
individual pays at rate pi when in state i and receives an amount having distri-
bution Bij when his/her state changes from i to j. q
Notes and references The point process of arrivals was studied in detail byNeuts [267 ] and is often referred to in the queueing literature as Neuts ' versatile point
process , or, more recently, as the Markovian arrival process (MAP). However , the ideaof arrivals at transition epochs can be found in Hermann [193] and Rudemo [313].
The versatility of the set-up is even greater than for the Markov-modulated model.In fact , Hermann [193 ] and Asmussen & Koole [37] showed that in some appropriate

176 CHAPTER VI. MARKOVIAN ENVIRONMENT
sense any arrival stream to a risk process can be approximated by a model of thetype studied in this section : any marked point process is the weak limit of a sequenceof such models . For the Markov-modulated model, one limitation for approximation
purposes is the inequality Var Nt > ENt which needs not hold for all arrival streams.
Some main queueing references using the MAP are Ramaswami [298], Sengupta
[336], Lucantoni [248], Lucantoni et at. [248], Neuts [271] and Asmussen & Perry [42].
6 Risk theory in a periodic environment
6a The model
We assume as in the previous part of the chapter that the arrival mechanismhas a certain time-inhomogeneity, but now exhibiting (deterministic) periodicfluctuations rather than (random ) Markovian ones. Without loss of generality,let the period be 1; for s E E = [0, 1), we talk of s as the 'time of the year'. Thebasic assumptions are as follows:
• The arrival intensity at time t of the year is 3(t) for a certain function
/3(t), 0 < t < 1;
• Claims arriving at time t of the year have distribution B(t);
• The premium rate at time t of the year is p(t).
By periodic extension, we may assume that the functions /3(t), p(t) and B(t) are
defined also for t t [0, 1). Obviously, one needs to assume also (as a minimum)that they are measurable in t; from an application point of view, continuitywould hold in presumably all reasonable examples.
We denote throughout the initial season by s and by P(8) the correspondinggoverning probability measure for the risk process. Thus at time t the premiumrate is p(s + t), a claim arrives with rate /3(s + t) and is distributed according
to B(8+0 . Let
t/3* _ f
1
/3(t) dt, B* = J1
B(t) ((*) dt, p * = J1
p(t) dt. (6.1))3
0
Then the average arrival rate is /3* and the safety loading rt is 77 = (p* - p)/p,
where
i f00p = f /3(v) dv f xB(°) (dx) _ ,3*µs • (6.2)0 0
Note that p is the average net claim amount per unit time and µ* = p//3* the
average mean claim size.

6. RISK THEORY IN A PERIODIC ENVIRONMENT 177
In a similar manner as in Proposition 1.8, one may think of the standardcompound Poisson model with parameters 3*, B*, p* as an averaged versionof the periodic model, or, equivalently, of the periodic model as arising fromthe compound Poisson model by adding some extra variability. Many of theresults given below indicate that the averaged and the periodic model share anumber of main features. In particular, it turns out that they have the sameadjustment coefficient. In contrast, for Markov-modulated model typically theadjustment coefficient is larger than for the averaged model (cf. Section 4b), inagreement with the general principle of added variation increasing the risk (cf.the discussion in 111.9). The behaviour of the periodic model needs not to beseen as a violation of this principle, since the added variation is deterministic,not random.
Example 6 .1 As an example to be used for numerical illustration throughoutthis section, let ,3(t) = 3A(1 + sin 27rt), p(t) = A and let B(t) be a mixtureof two exponential distributions with intensities 3 and 7 and weights w(t) _(1 +cos27rt)/2 and 1 - w(t), respectively.
It is easily seen that ,3* = 3A, p* = A whereas B* is a mixture of expo-nential distributions with intensities 3 and 7 and weights 1/2 for each (1/2 =
ff w(t)dt = f o (1- w(t)) dt). Thus, the average compound Poisson model is thesame as in III.(3.1) and Example 1.10, and we recall from there that the ruinprobability is
*(u) _ 324 15e-u + 35e-6u. (6.3)
Note that A enters just as a scaling factor of the time axis, and thus the averagedstandard compound Poisson models have the same risk for all A. In contrast,we shall see that for the periodic model increasing A increases the effect of theperiodic fluctuations. q
Remark 6 .2 Define
T
6(T) = p(t ) dt, St = Se-I(t).0
Then (by standard operational time arguments ) {St} is a periodic risk process
with unit premium rate and the same infinite horizon ruin probabilities. Weassume in the rest of this section that p(t) - 1. q
The arrival process {Nt}t>0 is a time-inhomogeneous Poisson process withintensity function {/3(s + t)}t>0 . The claim surplus process {St }two is defined
in the obvious way as St = ^N° Ui - t. Thus , the conditional distribution

178 CHAPTER VL MARKOVIAN ENVIRONMENT
of U; given that the ith claim occurs at time t is B(8+t). As usual, r(u) _inf It > 0 : St > u} is the time to ruin , and the ruin probabilities are
0(8) (U) = P(s)(r(u) < 00), 0 (5)(u,T) = P(8)(r(u) <T).
The claim surplus process {St} may be seen as a Markov additive process,with the underlying Markov process {Jt} being deterministic period motion onE = [0, 1), i.e.
Jt = (s + t) mod 1 P(8) - a.s.. (6.4)
At a first sight this point of view may appear quite artificial, but it turns outto have obvious benefits in terms of guidelining the analysis of the model as aparallel of the analysis for the Markovian environment risk process.
Notes and references The model has been studied in risk theory by, e.g., Daykin
et.al. [101] , Dassios & Embrechts [98] and Asmussen & Rolski [43], [44] (the literature
in the mathematical equivalent setting of queueing theory is somewhat more extensive,
see the Notes to Section 7). The exposition of the present chapter is basically an extract
from [44], with some variants in the proofs.
6b Lundberg conjugation
Motivated by the discussion in Chapter II.5 (see in particular Remark 11.5.8),we start by deriving formulas giving the m.g.f. of the claim surplus process. Tothis end, let
f8+1tc*(a) _ (B* [a] - 1) -a = J ,3(v)(B(vl [a] - 1) dv - a
8
be the c.g.f. of the averaged compound Poisson model (the last expression isindependent of s by periodicity), and define
h(s;a) = exp { - ^8 [,Q(v) (B(„) [a] - 1) - a - tc* (a)] dv
then h (.; a) is periodic on R. J
Theorem 6 . 3 E(8)eaSt = h(s; a) etw*(a)h(s+t;a)
Proof Conditioning upon whether a claim occurs in [t, t + dt] or not, we obtain
E.(8) [eaSt+dt I7t]= (1 - (3(s + t)dt)e«St -adt + /3(s + t)dt - east B(8+t) [a]
= east - (1 - adt +,3(s + t)dt[B(8+t)[a] - 1]) ,

6. RISK THEORY IN A PERIODIC ENVIRONMENT 179
E(8)east+dt
d Et.(8)east
dt log E(8)east
log E(8 )et
where
= E(8)east (1 - adt +,0(s + t)dt[B(8+t)[a] - 1]) ,
= E(8)east (-a +,3(s + t)[D(8+t)[a] - 1]) ,
= -a + f3(s + t) [B(8+t) [a] - 1],
= -at + + v)(B([a] - 1)dvf
= log h(s + t; a) - log h(s; a),
h(t; a) = exp I fo t3(v)(kv)[a) - 1)dv -atetk•(a)
h(t; a)
Thus
E(8)east = h(s + t; a) = h(s; a) et,.* (a)
h(s; a) h(s + t; a)
Corollary 6.4 For each 0 such that the integrals in the definition of h(t ; 0) existand are finite,
h(s + t; B) eoSt -t,c* (e){Le,t}t>o = h(s; 9)
Lo
is a P ( 8)-martingale with mean one.
Proof In the Markov additive sense of (6.4), we can write
Let = h(Jt;9) east-t,t.(e)h(Jo; 0)
P(8)-a.s . so that obviously {Lo,t} is a multiplicative functional for the Markovprocess { (Jt, St)} . According to Remark 11.2.6 , it then suffices to note thatE(8)Le ,t = 1 by Theorem 6.3. q
Remark 6.5 The formula for h(s) = h(s; a) as well as the fact that rc = k` (a)is the correct exponential growth rate of Eeast can be derived via Remark11.5.9 as follows. With g the infinitesimal generator of {Xt} = {(Jt, St)} and

180 CHAPTER VI. MARKOVIAN ENVIRONMENT
ha(s,y) = eayh(s), the requirement is cha(i,0) = Kh(s). However, as above
E (s) ha(Jdt, Sdt)= h(s + dt)e-adt (1 -,(3(s)dt) +,3(s)dt • B(s)[a]h(s)
= h(s) + dt {-ah(s) -,3(s)h(s) + h'(s) +,3(s)ks)[a]h(s)}
gha(s, 0) = -ah(s) -13(s)h(s) + h'(s) +,3(s)B(s) [a]h(s).
Equating this to rch (s) and dividing by h(s ) yields
) =)&s) [a] + tc) 0(6 (+
h(sa , s s ,
h(s) = exp { - J s [,3(v)( Bi"i [a] - 1) - a - tc] dv}
(normalizing by h(0) = 1). That rc = is*(a) then follows by noting that h(1) _
h(0) by periodicity. q
For each 0 satisfying the conditions of Corollary 6.4, it follows by TheoremII.2.5 that we can define a new Markov process {(Jt, St)} with governing prob-
ability measures Fes), say, such that for any s and T < oo, the restrictions of
Plsi and Pest to Ft are equivalent with likelihood ratio Le,T.
Proposition 6.6 The P(s), 0 < s < 1, correspond to a new periodic risk model
with parameters
ex,60(t) = a(t)B(t)[0], Bet)(dx) = ^ B(t ) (dx).
Proof (i) Check that m.g.f. of St is as for the asserted periodic risk model, cf.Proposition 6.3; (ii) use Markov-modulated approximations (Section 6c); ( iii)use approximations with piecewiese constant /3(s), B(s); (iv) finally, see [44] for
a formal proof. 11
Now define 'y as the positive solution of the Lundberg equation for the av-eraged model. That is, -y solves n* (-y) = 0. When a = y, we put for short
h(s) = h(s;'y). A further important constant is the value -yo (located in (0, ry))
at which n* (a) attains its minimum. That is, -yo is determined by
0 = k* (70) = QB*, [70] - 1.
Lemma 6 .7 When a > -yo, P(s) (T(u) < oo) = 1 for all u > 0.

6. RISK THEORY IN A PERIODIC ENVIRONMENT 181
Proof According to (6.2), the mean number of claims per unit time is
p« = J 1,6(v) dv J ' xe«xB (°) (dx)o 33 o
r^= ^' J xe«xB'(dx) = Q'B' [a] = ^c"'(a) + 1,
0
which is > 1 by convexity. q
The relevant likelihood ratio representation of the ruin probabilities nowfollows immediately from Corollary 11.2.4. Here and in the following, ^(u) =
ST(u) - u is the overshoot and 9(u) = (T(u) + s) mod 1 the season at the timeof ruin.
Corollary 6.8 The ruin probabilities can be computed as
(u)+T(u)k'(a)^/i(8) (u, T) = h(s; a)e-«uE(8) e «^ ; T(u) < (6.7)
h(B(u); a) TI
0(')(u) = h(s; a)e-«uE (a h(9(u); a) a > ry0 (6.8)
iP(s) (u) = h(s)e-7uE(`) h(O(u))
(6.9)
To obtain the Cramer-Lundberg approximation from Corollary 3.1, we needthe following auxiliary result . The proof involves machinery from the ergodictheory of Markov chains on a general state space, which is not used elsewherein the book, and we refer to [44].
Lemma 6 .9 Assume that there exist open intervals I C [0, 1), J C R+ suchthat the B(8), s E I, have components with densities b(8)(x) satisfying
inf 0 (s)b(8)(x ) > 0. (6.10)sEI, xEJ
Then for each a, the Markov process {(^(u),9(u))}u>0, considered with govern-
ing probability measures { E(8) }E[ , has a unique stationary distribution, says0,1)
the distribution of (l: (oo), B(oo)), and no matter what is the initial season s,
Wu), 0(u)) -* (b(oo), e(cc))
Letting u --> oo in (6.9) and noting that weak convergence entails convergence ofE f (^(u), 9(u)) for any bounded continuous function (e.g. f (x, q) = e-ryx/h(q)),we get:

182 CHAPTER VI. MARKOVIAN ENVIRONMENT
Theorem 6.10 Under the condition (6.10) of Lemma 3.1,
whereC = E1 h(B(oo))
Note that (6.11) gives an interpretation of h(s ) as a measure of how the
risks of different initial seasons s vary. For our basic Example 6 . 1, elementary
calculus yields
h(s) = exp { A C 2^ cos 2irs - 4^ sin 21rs + 11 cos 41rs - 16,ir) }
Plots of h for different values of A are given in Fig. 6.1, illustrating that the
effect of seasonality increases with A.
A=1/4
A=1
A=4
0
Figure 6.1
In contrast to h, it does not seem within the range of our methods to computeC explicitly, which may provide one among many motivations for the Markov-modulated approximation procedure to be considered in Section 6c. Amongother things, this provides an algorithm for computing C as a limit. At this
stage , Theorem 6 . 10 shows that certainly ry is the correct Lundberg exponent.
Noting that ^(u) > 0 in (6.9), we obtain immediately the following version of
Lundberg 's inequality which is a direct parallel of the result given in Corollary
3.6 for the Markov-modulated model:
Theorem 6 . 11 7/'O (u) < C+°)h(s) e-ry", where
C(o) = 1+ info<t<i h(t)
Vi(8) (u) - Ch(s)e-ry", u -+ oo, (6.11)
e- -W- )

6. RISK THEORY IN A PERIODIC ENVIRONMENT 183
Thus, e.g., in our basic example with A = 1, we obtain Co) = 1.42 so that
tp(8) (u) < 1.42 • exp {J_1 cos 27rs - 47r sin 27rs + 167r cos 47rs - 167r I Cu.
(6.12)As for the Markovian environment model, Lundberg's inequality can be con-
siderably sharpened and extended. We state the results below; the proofs arebasically the same as in Section 3 and we refer to [44] for details.
Consider first the time-dependent version of Lundberg's inequality. Just asin IV.4, we substitute T = yu in 0(u, T) and replace the Lundberg exponent ryby ryy = ay - yr. (ay), where ay is the unique solution of
W(ay) = •y (6.13)
Elementary convexity arguments show that we always have ryy > -Y and ay > ry,r.(ay) > 0 when y < 1/ic' (7), whereas ay < -y, #c(ay) < 0 when y > 1/tc'('y).
Theorem 6 .12 Let 00)(y)
,(8) (u, yu)
000 (u) - 0(8) (u+ yu)
1 Theninfo < t<i h(t; ay) •
< C+)(y)h(s)e-7yu,
(6.14)
(6.15)
The next result improves upon the constant C+) in front of e-ryu in Theorem6.11 as well as it supplements with a lower bound.
Theorem 6.13 Let
= 1 B(t)C o<tf i h(t) 2no fx°O e'r(Y-x (x))B( t) (dy)'-
1 B(t)C+ = sup
(x)sup
>(6.16
o<t<i h (t) xo J, e7 ( y-x)B(t)(dy)
Then for all $ E [0, 1 ) and all u > 0,
C_h(s)e-7u < V,(s)(u) < C+h(s)e-7". (6.17)
In order to apply Theorem 6.13 to our basic example, we first note that thefunction
u{w • 3e-3x + ( 1 - w) .7e - 7x jdx _ 6w + 6(1 - w)e-4ufu° ex-u {w • 3e -3x + (1 - w ) • 7e _7x } dx 9w + 7(1 - w)e-4u

184 CHAPTER VI. MARKOVIAN ENVIRONMENT
attains its minimum 2/3 for u = oo and its maximum 6 /(7 + 2w) for u = 0.Thus
C_ = 2 inf ex cos 2irs - 1 sin 27rs + 1 cos 47rs - 93 0<8<1 p 27r 47r 167r 161r
_ _e-0.013,\
36 exp { -A (- cos 27rs - -L sin 27rs + 1 I cos 47rs - 19 }
C+ = sup0<8<1 8 + cos 21rs
Thus e.g. for A = 1 (where 3 e-0.013,\ = 0 .66, C+ = 1.20),
1/i18 1 s (u) > 0.66. exp 2^ cos 21rs - 4^ sin 2irs + 16^ cos 41rs - 16- I e-u,
,181 s(u) < 1.20 •exp { 2n cos 27rs - 1 sin 2irs + 16_ cos 47rs - 19 I e-u.
Finally, we have the following result:
Theorem 6 . 14 Let C+('yo) be as in (6.16) with 'y replaced by -yo and h(t) byh(t; -yo), and let 8 = er' (Y0). Then
0 <'p(8)(u ) -,(8)(u,T) < C+('Yo)h(s;'Yo)e-7oudT . (6.18)
Notes and references The material is from Asmussen & Rolski [44]. Some of the
present proofs are more elementary by avoiding the general point process machinery
of [44], but thereby also slightly longer.
6c Markov-modulated approximations
A periodic risk model may be seen as a varying environment model, where theenvironment at time t is (s + t) mod 1 E [0, 1), with s the initial season. Ofcourse, such a deterministic periodic environment may be seen as a special caseof a Markovian one (allowing a continuous state space E = [0, 1) for the envi-ronment), and in fact, much of the analysis of the preceding section is modelledafter the techniques developed in the preceding sections for the case of a finiteE. This observation motivates to look for a more formal connection betweenthe periodic model and the one evolving in a finite Markovian environment.
The idea is basically to approximate the (deterministic) continuous clock bya discrete (random) Markovian one with n 'months'. Thus, the nth Markovianenvironmental process {Jt} moves cyclically on {1, ... , n}, completing a cycle
2

7. DUAL QUEUEING MODELS 185
within one unit of time on the average , so that the intensity matrix is A(n) givenby
A(n) _
-n n 0 ••• 00 -n n ••• 0
n 0 0 ••• -n
(6.19)
Arrivals occur at rate /3ni and their claim sizes are distributed according to Bniif the governing Markov process is in state i. We want to choose the /3ni andBni in order to achieve good convergence to the periodic model. To this end,one simple choice is
i - 1 ((i 1)/n)Oni = 0( ) and Bni = B , (6.20)
but others are also possible. We let {Stn)}t>o
be the claim surplus process of
the nth approximating Markov-modulated model, M(n) = Supt>o Stn), and theruin probability corresponding to the initial state i of the environment is then
Y'yn)(t) = F (M(n) > t), (6.21)
which serves as an approximation to 0(1)(u) whenever n is large and i/n s.
Notes and references See Rolski [306].
7 Dual queueing models
The essence of the results of the present section is that the ruin probabilitiesi/ (u), z/'i (u, T) can be expressed in a simple way in terms of the waiting timeprobabilities of a queueing system with the input being the time-reversed inputof the risk process. This queue is commonly denoted as the Markov-modulatedM/G/1 queue and has received considerable attention in the last decade. Thus,since the settings are equivalent from a mathematical point of view, it is desirableto have formulas permitting freely to translate from one setting into the other.
Let 0j, Bi, A be the parameters defining the risk process in a random en-vironment and consider a queueing system governed by a Markov process {Jt }('Markov-modulated') as follows:
• The intensity matrix for {Jt } is the time-reversed intensity matrix At _A())i,jEE of the risk process, AE= Aii'r?/7ri-
• The arrival intensity is /3i when Jt = i;

186 CHAPTER VI. MARKOVIAN ENVIRONMENT
• Customers arriving when Jt = i have service time distribution Bi;
• The queueing discipline is FIFO.
The actual waiting time process 1W-1.=1 , 2 .... and the virtual waiting time
(workload) process {Vt}too are defined exactly as for the renewal model in Chap-
ter V.
Proposition 7.1 Assume V0 = 0. Then
Pi(T(u) < T, JT = j) = LjPj (VT > u, JJ = i). (7.1)7ri
In particular,
,0i (u , T) = 1 P.n(VT > u, JT = i) = 'P. (VT > u I JT = 2), (7.2)7ri
Oi(u) = -1- P(V > u, J* = i) = P.T(V > u I J* = i), (7.3)7ri
where (V, J*) is the steady-state limit of (Vt, Jt ).
Proof Consider stationary versions of {Jt}o<t<T, {Jt }o<t<T• Then we mayassume that Jt = JT-t, 0 < t < T and that the risk process {Rt}o<t<T is
coupled to the virtual waiting process {Vt}o<t<T as in the basic duality-lemma
(Theorem 11.3.1). The first conclusion of that result then states that the events{T(u) < T, Jo = i, JT = j} and {VT > u, Jo = j, JT = i} coincide. Taking prob-
abilities and using the stationarity yields
7riPi(T(u) < T, JT = j) = 7rjPj(VT > u, JT = Z),
and (7.1) follows. For (7.2), just sum (7.1) over j, and for (7.3), let T - oo in
(7.2) and use that limF (VT > u, JT = i) = P(V > u, J* = i) for all j. q
Now let In denote the environment when customer n arrives and I* the
steady-state limit.
Proposition 7.2 The relation between the steady-state distributions of the ac-
tual and the virtual waiting time distribution is given by
F(W > u, I* )3i P(V > u, J* = i), (7.4)
where 0* = >jEE 7rj/3j. In particular,
ii (u) = P(W > u, I* = i).it /3

7. DUAL QUEUEING MODELS 187
Proof Identifying the distribution of (W, I*) with the time-average , we have
N1: I(W, >u,I,,=i) a4. P(W >u,I*=i), N -* oo.n=1
However, if T is large, on average 0*T customers arrive in [0, T], and of these,
on average /32TP(V > u, J* = i) see W > u, I* = i. Taking the ratio yields
(7.4), and (7.5) follows from (7.4) and (7.3). q
Notes and references One of the earliest papers drawing attention to the Markov-modulated M/G/1 queue is Burman & Smith [84]. The first comprehensive solutionof the waiting time problem is Regterschot & de Smit [301], a paper relying heavilyon classical complex plane methods. A more probabilistic treatment was given byAsmussen [17], and further references (to which we add Prabhu & Zhu [296]) can befound there.
Proposition 7.1 is from Asmussen [16], with (7.3) improving somewhat upon (2.7)
of that paper. The relation (7.4) can be found in Regterschot & de Smit [301]; a generalformalism allowing this type of conclusion is 'conditional PASTA', see Regterschot &van Doorn [123].
In the setting of the periodic model of Section 6, the dual queueing model is aperiodic M/G/1 queue with arrival rate 0(-t) and service time distribution B(-') attime t of the year (assuming w.l.o.g. that /3(t), B(t) have been periodically extendedto negative t). With {Vt} denoting the workload process of the periodic queue, p < 1then ensures that V(*) = limN-loo VN+9 exists in distribution, and one has
PI'>(rr(u) < T) = P(-'_T)(VT > u), (7.6)
P(- T)(T(u) <T) = P(8)(VT > u), (7.7)
P(1-')(r(u) < oo) = P(')(00) > u). (7.8)
For treatments of periodic M/G/1 queue, see in particular Harrison & Lemoine [186],
Lemoine [242], [243], and Rolski [306].

This page is intentionally left blank

Chapter VII
Premiums depending on the
current reserve
1 Introduction
We assume as in Chapter III that the claim arrival process {Nt} is Poisson with
rate ,6, and that the claim sizes U1, U2, ... are i.i.d. with common distributionB and independent of {Nt}. Thus, the aggregate claims in [0, t] are
Nt
At = Ui (1.1)
(other terms are accumulated claims or total claims). However , the premiumcharged is assumed to depend upon the current reserve Rt so that the premiumrate is p (r) when Rt = r. Thus in between jumps, {Rt} moves according tothe differential equation R = p(R), and the evolution of the reserve may bedescribed by the equation
Z tt = u - At + p(R8) ds. (1.2)R
As earlier,
z/i(u) = F IinffRt< 0IRo=u 1 tk(u,T) = FloinfTRt< OIRo=u1
denote the ruin probabilities with/initial reserve u and infinite , resp . finite hori-
zon, and T(u) = inf {t > 0 : Rt < u} is the time to ruin starting from Ro = u
so that '(u) = F(T(u) < oo), i&(u,T) = F(T(u) < T).
189

190 CHAPTER VII. RESERVE-DEPENDENT PREMIUMS
The following examples provide some main motivation for studying themodel:
Example 1 .1 Assume that the company reduces the premium rate from pi top2 when the reserve comes above some critical value v. That is, pi > p2 and
p(r) =
One reason could be competition, where one would try to attract new customersas soon as the business has become reasonably safe. Another could be the pay-out of dividends: here the premium paid by the policy holders is the same for allr, but when the reserve comes above v, dividends are paid out at rate pi - p2.
Example 1.2 (INTEREST) If the company charges a constant premium rate pbut invests its money at interest rate e, we get p(r) = p + er. q
Example 1.3 (ABSOLUTE RUIN) Consider the same situation as in Example1.2, but assume now that the company borrows the deficit in the bank whenthe reserve goes negative, say at interest rate b. Thus at deficit x > 0 (meaningRt = -x), the payout rate of interest is Sx and absolute ruin occurs when thisexceeds the premium inflow p, i.e. when x > p/S, rather than when the reserveitself becomes negative. In this situation, we can put Rt = Rt + p/S,
P(r) _ p + e(r - p/S) r > p/Sp-5(p/5-r) 0<r<p/5
Then the ruin problem for {Rt } is of the type defined above, and the probability
of absolute ruin with initial reserve u E [-p/S, oo) is given by i (u + p/S). q
Now return to the general model.
Proposition 1.4 Either i,i(u) = 1 for all u, or o(u) < 1 for all u.
Proof Obviously '(u) < ilb(v) when u > v. Assume 0(u) < 1 for some u. IfRo = v < u, there is positive probability, say e, that {Rt} will reach level ubefore the first claim arrives. Hence in terms of survival probabilities, 1 - Vi(v)> e(1 - '(u)) > 0 so that V'(v) < 1. q
A basic question is thus which premium rules p(r) ensure that 'O(u) < 1.No tractable necessary and sufficient condition is known in complete generalityof the model. However, it seems reasonable to assume monotonicity (p(r) is

1. INTRODUCTION 191
decreasing in Example 1.1 and increasing in Example 1.2) for r sufficiently large
so that p(oo) = limr.+ p(r) exists. This is basically covered by the following
result (but note that the case p(r) .I3IB requires a more detailed analysis and
that µB < oo is not always necessary for O(u) < 1 when p(r) -4 oo, cf. [APQ]
pp. 296-297):
Theorem 1.5 (a) If p(r) < /.3µB for all sufficiently large r, then ?(u) = 1 for
all u;(b) If p(r) > /3µB + e for all sufficiently large r and some e > 0, then l/i(u) < 1
for all u, and P(Rt -+ oo) > 0.
Proof This follows by a simple comparison with the compound Poisson model.
Let Op(u) refer to the compound Poisson model with the same 0, B and (con-
stant) premium rate p.In case (a), let uo be chosen such that p(r) < p = /3µB for r > uo. Starting
from Ro = uo, the probability that Rt < uo for some t is at least tp(0) = 1 (cf.
Proposition I1I.1.2(d)), hence Rt < uo also for a whole sequence of is convergingto oo. However, obviously infu<uo z/'(u) > 0, and hence by a geometric trialsargument,o(uo) = 1 so that t/'(u) = 1 for all u by Proposition 1.4. In case (b),
let uo be chosen such that p(r) > p = 0I-LB + e for r > uo. Then if u > no, we
have z/i(u) <p(u - uo) and, appealing to Proposition 111.1.2 once more, that
zPp(u - uo) < 1. Hence ik(u) < 1 for all u by Proposition III.1.2(d). q
We next recall the following results, which was proved in 11.3. Here {Vt}twois a storage process which has reflection at zero and initial condition Vo = 0.
In between jumps, {Vt} decreases at rate p(v) when Vt = v (i.e., V = -p(V)).
That is, instead of (1.2) we have
tVt = At - f p(Vs) ds, (1.4)
0
and we use the convention p(O) = 0 to make zero a reflecting barrier (whenhitting 0 , {Vt} remains at 0 until the next arrival).
Theorem 1.6 For any T < oo, one can couple the risk process and the stor-
age process on [0, T] in such a way that the events {-r(u) <T} and {VT > u}
coincide . In particular,
,b(u,T) = P(VT > u), (1.5)
and the process {Vt} has a proper limit in distribution , say V, if and only if
V)(u) < 1 for all u. Then
0(u) = P(V > u). (1.6)

192 CHAPTER VII. RESERVE-DEPENDENT PREMIUMS
In order to make Theorem 1.6 applicable, we thus need to look more intothe stationary distribution G, say, for the storage process {Vt}. It is intuitivelyobvious and not too hard to prove that G is a mixture of two components, onehaving an atom at 0 of size 'yo, say, and the other being given by a density g(x)on (0, oo). It follows in particular that
0(u) = fg(Y)dy. (1.7)
Proposition 1.7
(x - y)g(y) dy. (1.8)p(x)g(x) = -tofB (x) + a f
Proof In stationarity, the flow of mass from [0, x] to (x, oo) must be the same asthe flow the other way. In view of the path structure of {V t }, this means thatthe rate of upcrossings of level x must be the same as the rate of downcrossings.Now obviously, the l.h.s. of (1.8) is the rate of downcrossings (the event of anarrival in [t, t + dt] can be neglected so that a path of {Vt} corresponds to adowncrossing in [t, t + dt] if and only if Vt E [x, x + p(x)dt]). An attempt ofan upcrossing occurs as result of an arrival, say when {Vt} is in state y, andis succesful if the jump size is larger than x - y. Considering the cases y = 0and 0 < y < x separately, we arrive at the desired interpretation of the r.h.s. of(1.8) as the rate of upcrossings. q
Define ^x 1w(x) Jo p(t) dt.
Then w(x) is the time it takes for the reserve to reach level x provided it startswith Ro = 0 and no claims arrive . Note that it may happen that w (x) = oo forall x > 0, say if p(r) goes to 0 at rate 1 /r or faster as r j 0.
Corollary 1.8 Assume that B is exponential with rate b, B(x) = e- 6x and thatw(x) < oo for all x > 0. Then the ruin probability is tp (u) = f' g(y)dy, where
g(x) = p( ^ exp {,Qw(x) - Sx}, yo 1 + ooJo
Q exp {,6w(x) - Sx} dx.AX)
(1.9)
Proof We may rewrite (1.8) as
g(x) = p 1 {yo13e_6x +,Oe-ax f x e'Yg (y) dy } = p) e-axa(x)

1. INTRODUCTION
where c(x) = 1o + fo elyg(y) dy so that
(x) = eaxg(x) _
Thus
1p(x)
nkx).
log rc(x) = log rc(0) + Jo X L dt = log rc(0) + /3w(x),p(t)
c(x) = rc (0)em"lxl = Yoes"lxl,
g(x) = e-axK' (x) = e-6x,Yo)3w'(x)e'6"lxl
193
which is the same as the expression in (1.9). That 'Yo has the asserted value isa consequence of 1 = I I G I I = yo + f g• q
Remark 1.9 The exponential case in Corollary 1.8 is the only one in whichexplicit formulas are known (or almost so; see further the notes to Section 2),and thus it becomes important to develop algorithms for computing the ruinprobabilities. We next outline one possible approach based upon the integralequation (1.8) (another one is based upon numerical solution of a system ofdifferential equations which can be derived under phase-type assumptions, seefurther VIII.7).
A Volterra integral equation has the general form
xg(x) = h(x) + f K(x, y)9(y) dy, (1.10)
0
where g(x) is an unknown function (x > 0), h(x) is known and K(x,y) is a
suitable kernel. Dividing (1.8) by p(x) and letting
K(x, y) _ ,QB(x - y) _ 'YoIB(x)
p(x) , h(x) p(x)
we see that for fixed -to, the function g(x) in (1.8) satisfies (1.10). For thepurpose of explicit computation of g(x) (and thereby -%(u)), the general theoryof Volterra equations does not seem to lead beyond the exponential case alreadytreated in Corollary 1.8. However, one might try instead a numerical solution.We consider the simplest possible approach based upon the most basic numericalintegration procedure, the trapezoidal rule
h f xN f (x)dx = 2 [f (xo) + 2f (xi) + 2f (x2) + ... + 2f (XN-1) + f (xN)1p

194 CHAPTER VII. RESERVE-DEPENDENT PREMIUMS
where xk = x0 + kh. Fixing h > 0, letting x0 = 0 (i.e. xk = kh) and writing
9k = 9(xk ), Kk,e = K(xk, xe), this leads to
h 9N = hN + 2 {KN,09o+KN,N9N}+h{KN,191+'''+KN,N-19N-1},
i.e.hN+ ZKN ,ogo +h{KN,lgl+•••+KN,N-19N-1}
1.119N= 1 - ZKNN ( )
In the case of (1.8), the unknown yo is involved. However, (1.11) is easilyseen to be linear in yo. One therefore first makes a trial solution g*(x) corre-sponding to yo = 1, i.e. h(x) = h*(x) = (3B(x)/p(x), and computes f o' g*(x)dxnumerically (by truncation and using the gk). Then g(x) = yog*(x), and IIGII= 1 then yields f
g*(x)dx1= 1+00
(1.12)'Yo
from which yo and hence g(x) and z/'(u) can be computed. q
la Two-step premium functions
We now assume the premium function to be constant in two levels as in Example1.1,
p(r) _ J 1'1 r < v (1.13)P2 r > v.
We may think of the risk reserve process Rt as pieced together of two risk reserveprocesses R' and Rt with constant premiums p1, P2, such that Rt coincide withRt under level v and with
Rtabove level v. For an example of a sample path,
see Fig. 1.1.
Rt
V
Figure 1.1

1. INTRODUCTION 195
Proposition 1.10 Let V) ' (u) denote the ruin probability of {Rt}, define a =inf It > 0 : Rt < v}, let pi (u) be the probability of ruin between a and the nextupcrossing of v (including ruin possibly at a), and let
q(u) = 1 - V" (u) 0 < u < v. (1.14)
Then
1 - q(u) + q (u)z,b(v) 0 < u < v
p1(v) u = v
1 + pi (v ) - '02 (0)
pi (u) + (0, (u - v) - pi (u)) z/i(v ) v < u < oo.
Proof Let w = inf{t > 0 1 Rt= v or Rt < 0} and let Q1 (u) = Pu(RC,, = v)be the probability of upcrossing level v before ruin given the process starts atu < v. If we for a moment consider the process under level v, Rt , only, we getVil (u) = 1 - q, (u ) + g1(u),O1(v). Solving for ql (u), it follows that q1 (u) = q(u).
With this interpretation of q(u) is follows that if u < v then the probabilityof ruin will be the sum of the probability of being ruined before upcrossing v,1 - q(u), and the probability of ruin given we hit v first , q(u)z'(v). Similarly,if u > v then the probability of ruin is the sum of being ruined between a andthe next upcrossing of v which is pl (u), and the probability of ruin given theprocess hits v before (-oo, 0) again after a,
(Pu(a < oo ) - p1(u))''(v) = (Vi2(u - v) - p1 (u))''(v)•
This yields the expression for u > v, and the one for u = v then immediatelyfollows. q
Example 1 .11 Assume that B is exponential, B(x) = e-62. Then
01 (u)_ 0 e -.yiu ,,2 (u) = )3 e -72u
p1S P2S
where ry; = S - ,Q/p;, so that
1 - ~ e-ry1up1Sq -
1 - Q e-ryly
P1S
Furthermore , for u > v P(a < oo ) = 02(u - v) and the conditional distribution
of v - Ro given a < oo is exponential with rate S . If v - Ro < 0, ruin occurs at
time a . If v - R, = x E [0, v], the probability of ruin before the next upcrossing
of v is 1 - q(v - x). Hence

196 CHAPTER VII. RESERVE-DEPENDENT PREMIUMS
(
pi(u) _ 02 (u - v){ a-av + J (1 - q(v - x))be-dxdxI 0
1- a e-7i(v -x)
e-7z(u-v) 1 _ P16 Se-6xdxP2,e0 1 - a e-7iv
P16
1 - e -6V - a e -71v (e(71 -6)v - 1)Qbe-72(u-v) 1 - p1(71 - b)
P2 1 - Ie-71vP16
1 - e-71vp2be-7z(u-v) 1 _ a
1 - -e -7iv
P'6
0
Also for general phase-type distributions, all quantities in Proposition 1.10can be found explicitly, see VIII.7.
Notes and references Some early references drawing attention to the model areDawidson [100] and Segerdahl [332]. For the absolute ruin problem, see Gerber [155]
and Dassios & Embrechts [98].
Equation (1.6) was derived by Harrison & Resnick [186] by a different approach,
whereas (1.5) is from Asmussen & Schock Petersen [50]; see further the notes to II.3.One would think that it should be possible to derive the representations (1.7), (1.8) ofthe ruin probabilities without reference to storage processes. No such direct derivation
is, however, known to the author.
For some explicit solutions beyond Corollary 1.8, see the notes to Section 2
Remark 1.9 is based upon Schock Petersen [288]; for complexity- and accuracyaspects, see the Notes to VIII.7. Extensive discussion of the numerical solution of
Volterra equations can be found in Baker [57]; see also Jagerman [209], [210].
2 The model with interest
In this section, we assume that p(x) = p + Ex. This example is of particularapplication relevance because of the interpretation of f as interest rate. However,it also turns out to have nice mathematical features.

2. THE MODEL WITH INTEREST 197
A basic tool is a representation of the ruin probability in terms of a dis-counted stochastic integral
Z = - f e-EtdSt (2.1)0
w.r.t. the claim surplus process St = At - pt = EN` U; - pt of the associated
compound Poisson model without interest . Write Rt") when Ro = u. We first
note that:
Proposition 2.1 Rt") = eetu + Rt°)
Proof The result is obvious if one thinks in economic terms and represents thereserve at time t as the initial reserve u with added interest plus the gains/deficitfrom the claims and incoming premiums. For a more formal mathematical proof,
note that
dR(u) = p + eR(u) - dAt,
d [R(") - eetu] = p + e [R(u) - eEtu] - dAt .
Since R( ;u) - eE'0u = 0 for all u, Rt") - eEtu must therefore be independent of u
which yields the result. 0
Let
Then
Zt = e-etR(0) = e-et (ft (p + eR(°)) ds - At I
dZt = e -Et (_edt ft(p + eR°) ds + (p + eR°)) dt + e dt A- dA
= e_et (pdt - dAt) = -e-EtdSt. /
Thusv
Z,, = - e-etdSt,0
where the last integral exists pathwise because {St} is of locally bounded vari-ation.
Proposition 2.2 The r.v. Z in (2.1) is well-defined and finite, with distribution
H(z) = P(Z < z) given by the m.g.f.
H[a] = Ee" = exp{f °° k
(-ae-Et) dt} = exp{fa
k (-y) dy}
where k(a) _ 13(B[a] - 1) - pa. Further Zt a ' Z as t --+ oo.

198 CHAPTER VII. RESERVE-DEPENDENT PREMIUMS
Proof Let Mt =At -tAUB. Then St = Mt+t(/3pB-p) and {M„} is a martingale.From this it follows immediately that {fo
e-EtdMt}is again a martingale. The
mean is 0 and (since Var(dMt) = /3PB2)dt)
Var/'v (2)
(Z ' e-'tdMt) J e- eft/3p(B)dt = a2B (1 - e-2ev).o
Hence the limit as v -3 oo exists by the convergence theorem for L2-boundedmartingales, and we have
Zv =
f0"
a'-
e-Et (dMt + (3p$ - p)dt)0
- Jv
e-EtdSt = -fv
e-t(dMt + (,3pB - p)dt)0 oo
- foo
e-EtdSt = Z.
0
Now if X1i X2, ... are i.i.d. with c.g.f. 0 and p < 1, we obtain the c .g.f. ofE0° p'Xn at c as
00
log E fl ea°n X„n=1
00
= log 11 e0(av") _n=1
00
E 0(apn).n=1
Letting p = e-Eh, Xn = Snh - S(n+1)h, we have q5(a) = hic(- a), and obtain thec.g.f. of Z = - f0,30 e-'tdSt as
00 00 00lim E 0(apn ) = li h E rc(-ae-Fnh) = f tc (-ae-t) dt;n=1 1 n=1 0
the last expression for H[a] follows by the substitution y = ae-Et q
Theorem 2.3 z/'(u) =H(-u)
E [H(-RT(u)) I r(u) < oo] .
Proof Write r = r(u) for brevity. On {r < oo}, we have
u + Z = (u + Zr ) + (Z - Zr) = e-ET {e (u + Zr) - f '* e-E(t-T )dSt]
T
e-ET [R(u) + Z`],

2. THE MODEL WITH INTEREST 199
where Z* = - K* e-E(t-T)dSt is independent of F, and distributed as Z. The
last equality followed from Rt") = eEt(Zt + u), cf. Proposition 2.1, which also
yields r < oo on {Z < -u}. Hence
H(-u) = P(u + Z < 0) = P(RT + Z* < 0; r < oo)
zb(u)E [P(RT + Z* < 0 I)7T, r < oo)]
_ O(u)E [H(-RT(")) I r(u) < oo] .
Corollary 2.4 Assume that B is exponential, B(x) = e-6', and that p(x) _
p + Ex with p > 0. Then
o€Q/E-Ir, (8(p + cu);.
V) (u) 1\ E E
aA/EpalEe -6n1E +^3E1 / E1r Cbp; alE El
where 1'(x; i) = f 2°° tn-le-tdt is the incomplete Gamma function.
Proof 1 We use Corollary 1.8 and get
w(x) fo P + Etdt = e log(p + Ex) - e loge,
g(x) = p +0xexp { - log(p + Ex) - - log p - 6x }
ryo)3pal(p + ex)plE-1e-6^ J
70 = 1 + J p) exp {Ow(x) - Sx} dxx
r^+ J /E (p + Ex)01'-le-ax dx= 1+ f'
0
= 1+a f yI/E- 1e-6(Y -P)/E dy
Epo/ EP
1+ OEA/E- 1e6P/Er
60/epo/ e
( ,;,3 )
E E
lp(u) = -to foo a exp {w(x) - bx}AX)
YoacO/E" 1 ePE l ( 5(p
+ cu); 0)
501epolE E E

200 CHAPTER VII. RESERVE-DEPENDENT PREMIUMS
from which (2.2) follows by elementary algebra. q
Proof 2 We use Theorem 2.3. From ic(a) = ,3a/ (5 - a) - pa, it follows that
logH[a] = f 1 c(-y)dy = 1 f '(p-a/(a +y))dy0 Ey f 0
R/E1 [pa + )3log 8 - /3 log(b + a)] = log ePa/f (a + a )
ewhich shows that Z is distributed as p/E - V, where V is Gamma (b, 13/E), i.e.with density
x(3/e-1aQ/e
fV (x) _ e-6X
r (j3/E)' x > 0.
In particular,
H(-u) = P(Z < -u) = P(V > u + p/E) =r (8(p + Eu)/E; ,13/E)
r (,3/E)
By the memoryless property of the exponential distribution, -RT(u) has anexponential distribution with rate (S) and hence
E [H(-RT(u))I r(u) < oo]
LPe-6'r (P/C - V < x)]0 + f e-by fv (p/E - x) dx
/'P/' (p/ -x)p/e -150/f
bP(V > p/E) +I' (/3/E)
e- P/E dx
IF (0 /0 jF
(6P1'E;01'E) + (p/E)al aO l fe-bP/E }
/^From this (2.2) follows by elementary algebra. q
Example 2 .5 The analysis leading to Theorem 2.3 is also valid if {Rt} is ob-tained by adding interest to a more general process {Wt} with stationary inde-pendent increments. As an example, assume that {Wt} is Brownian motion withdrift µ and variance v2; then {Rt} is the diffusion with drift function p+Ex andconstant variance a2. The process {St} corresponds to {-Wt} so that c(a)or2a2/2 - pa, and the c.g.f. of Z is
IogH[a] = f ytc(-y)dy = e fa (0,2y +µ ) dy

3. THE LOCAL ADJUSTMENT COEFFICIENT
_ Q2a2 pa
4e E
201
I.e., Z is normal (p/E, Q2/2E), and since RT = 0 by the continuity of Brownianmotion, it follows that the ruin probability is
Cu)H(-u) -
H(0)
11
Notes and references Theorem 2.3 is from Harrison [185]; for a martingale proof,
se e.g. Gerber [157] p. 134 (the time scale there is discrete but the argument is easilyadapted to the continuous case). Corollary 2.4 is classical. The formula (2.3) wasderived by Emanuel et at. [129] and Harrison [185]; it is also used as basis for adiffusion approximation by these authors.
Paulsen & Gjessing [286] found some remarkable explicit formulas for 0(u) beyond
the exponential case in Corollary 1.8. The solution is in terms of Bessel functionsfor an Erlang(2) B and in terms of confluent hypergeometric functions for a H2 B (amixture of two exponentials). It must be noted, however, that the analysis does notseem to carry over to general phase-type distributions, not even Erlang(3) or H3, orto non-linear premium rules p(•).
A r.v. of the form Ei° p"X" with the X„ i.i.d. as in the proof of Proposition 2.2is a special case of a perpetuity; see e.g. Goldie & Griibel [167].
Further studies of the model with interest can be found in Boogaert & Crijns[71], Gerber [155], Delbaen & Haezendonck [104], Emanuel et at. [129], Paulsen [281],[282], [283], Paulsen & Gjessing [286] and Sundt & Teugels [356], [357]. Some of thesereferences also go into a stochastic interest rate.
3 The local adjustment coefficient. Logarithmicasymptotics
For the classical risk model with constant premium rule p(x) - p*, write y* forthe solution of the Lundberg equation
f3(B[ry*] - 1) - -Y*p* = 0 ,
write Vi* (u) for the ruin probability etc., and recall Lundberg 's inequality
W*(u) < e-ry*u

202 CHAPTER VII. RESERVE-DEPENDENT PREMIUMS
and the Cramer-Lundberg approximation
V,*(u) - C*e--f*". (3.3)
When trying to extend these results to the model of this chapter where p(x)
depends on x, a first step is the following:
Theorem 3 .1 Assume that for some 0 < 5o < oo, it holds that f3[s] T oo,
s f 6o, and that p(x) -* oo, x -* oo. Then lim suplog ?i(u) <
-JO . If 60<
00u->oo u
and e -E''p(r) -+ 0, e(1o+e)2 (x ) oo for all E > 0, thenlog u (u)
u -> 00.
In the proof as well as in the remaining part of the section , we will use the local
adjustment coefficient 'y(x), i.e . the function -y(x) of the reserve x obtained by
for a fixed x to define -y(x) as the adjustment coefficient of the classical riskmodel with p* = p(x), i.e . as solution of the equation
n(x,'y (x)) = 0 where r.(x, a) = f3(B[a] - 1) - ap(x); (3.4)
we assume existence of -y(x) for all x, as will hold under the steepness assumptionof Theorem 3.1, and (for simplicity) that
inf p(x) > (3µs , (3.5)x>0
which implies inf.,>o 7(x) > 0. The intuitive idea behind introducing localadjustment coefficients is that the classical risk model with premium rate p* =p(x) serves as a 'local approximation ' at level x for the general model when thereserve is close to x.
Proof of Theorem 3.1. The steepness assumption and p(x) -+ oo ensure 'y(x) -*
So. Let y* < So, let p* be a in (3 . 1) and for a given E > 0, choose uo such
that p(x) > p* when x > u0E. When u > uo, obviously O(u) can be boundedwith the probability that the Cramer -Lundberg compound Poisson model withpremium rate p* downcrosses level uE starting from u , which in turn by Lund-
berg 's inequality can be bounded by e-ry*(1-E)" Hence limsup„,.log '(u)/u
< -ry*(1 - E). Letting first E -* 0 and next ry * T 5o yields the first statement ofthe theorem.
For the last asssertion , choose c(,1 ), c(,2) such that p(x) < c(.i)eex, B(x) >
C(2)e-(ao+f)x for all x. Then we have the following lower bound for the time forthe reserve to go from level u to level u + v without a claim:
w(u + v) - w (u) v 1 dt > c(3)e-eu
J p(u+ t)

3. THE LOCAL ADJUSTMENT COEFFICIENT 203
where c,(3) = (1 - e-a°/(ecf1)). Therefore the probability that a claim arrives
before the reserve has reached level u + v is at least c(,4)e-E" Given such anarrival, ruin will occur if the claim is at least u + v, and hence
'(u) > c(4)e-euc(2)e-(do+e)u
The truth of this for all e > 0 implies lim inf log V,(u) > -so. q
Obviously, Theorem 3.1 only presents a first step, and in particular, theresult is not very informative if bo = oo. The rest of this section deals withtail estimates involving the local adjustment coefficient. The first main resultin this direction is the following version of Lundberg's inequality:
Theorem 3 .2 Assume that p(x) is a non-decreasing function of x and letI(u) = fo ry(x)dx. Then
,' (u) < e-I("). (3.6)
The second main result to be derived states that the bound in Theorem 3.2is also an approximation under appropriate conditions. The form of the resultis superficially similar to the Cramer-Lundberg approximation, noting that inmany cases the constant C is close to 1. However, the limit is not u -+ oo butthe slow Markov walk limit in large deviations theory (see e.g. Bucklew [81]).
For e > 0, let 0e (u) be evaluated for the process {Rte)} defined as in (1.2),
only with 3 replaced by /0/e and U; by cU2.
Theorem 3 .3 Assume that either (a) p(r) is a non-decreasing function of r,or (b) Condition 3.13 below holds. Then
lim-elog l/ie (u) = I(u). (3.7)CIO
Remarks:
1. Condition 3.13 is a technical condition on the claim size distribution B,which essentially says that an overshoot r.v. UJU > x cannot have a muchheavier tail than the claim U itself.
2. If p(x) = pis constant , then Rte) = CRtie for all t so that V), (u) = O(u/e),I.e., the asymptotics u -* oo and c -- 0 are the same.
3. The slow Markov walk limit is appropriate if p(x) does not vary too muchcompared to the given mean interarrival time 1/0 and the size U of theclaims ; one can then assume that e = 1 is small enough for Theorem 3.3to be reasonably precise and use e` (u) as approximation to 0 (u).

204 CHAPTER VII. RESERVE-DEPENDENT PREMIUMS
4. One would expect the behaviour in 2) to be important for the quantitativeperformance of the Lundberg inequality (3.6). However, it is formallyneeded only for Theorem 3.3.
5. As typical in large deviations theory, the logaritmic form of (3.7) is onlycaptures 'the main term in the exponent' but is not precise to describethe asymptotic form of O(u) in terms of ratio limit theorems (the pre-
cise asymptotics could be logI(u)e-1(U) or I(u)"e_I(u), say, rather than
e-I(u)).
3a Examples
Before giving the proofs of Theorems 3.2, 3.3, we consider some simple examples.First, we show how to rewrite the explicit solution for ti(u) in Corollary 1.8 interms of I(u) when the claims are exponential:
Example 3 .4 Consider again the exponential case B(x) = e-ax as in Corollary
1.8. Then y(x) = b - (3/p(x), and r
j v(x)dx = bu - a J p(x)-ldx =0
Integrating by parts, we get
1
'Yo
/' oo= 1+ J - exp {(3w (x) - bx} dx
" AX)
= 1 + J dodx(x) exp {,(iw(x) - bx} dx0
001 + [exp { /(3w(x) - bx}]o + b exp low (x) - bx} dxfo
1+0- 1 + b f e-,(x) dx,J0
1 ^oog(x )dx exp low(x) - bx} dx
70 Ju f AX)
lexp IOW (X ) bx + b oo exp low(x) bx dxu
r oo
= b J exp low (x) - bx} dx - exp {/33w(u) - bu},u

3. THE LOCAL ADJUSTMENT COEFFICIENT 205
and hence
f°° e-I(v)dy - e- I ( u)/b -I u o e -f0
ry(x+u)dxdy - 1/8
fool,e- I ( v)dy °° e- fo 7(x)dxdy
. (3.8)
1-1
We next give a direct derivations of Theorems 3.2, 3.3 in the particularlysimple case of diffusions:
Example 3.5 Assume that {Rt} is a diffusion on [0, oo) with drift µ(x) andvariance a2 (x) > 0 at x. The appropriate definition of the local adjustmentcoefficient 7(x) is then as the one 2p(x)la2(x) for the locally approximatingBrownian motion. It is well known that (see Theorem XI.1.10 or Karlin &Taylor [222] pp. 191-195) that
1P (U) = fu0 e-I(v)dy = e-I(u) follo e- fory(x+u)dxdy (3.9 )
11000 e-I(v)dy f000 e- f y(x)dxd y
If 7(x) is increasing , applying the inequality 7(x + u) > 7(x) yields immediatelythe conclusion of Theorem 3.2. For Theorem 3.3, note first that the appropriateslow Markov walk assumption amounts to u, (X) = µ(x), 0,2(X) = ev2(x) so that7e(x) = 7(x)/e, IE(u) = I(u)/e, and (3.9) yields
-e log ,0, (u) = I(u) + AE - BE, (3.10)
where
AE = e log 000 e- fo 7(x)dx/Edy f , Be = e log U000 e- fa 7(x+u)dx/Edy
o The analogue of (3.5) is infx>o 7(x) > 0 which implies that f °O ... in the defini-tion of AE converges to 0. In particular, the integral is bounded by 1 eventuallyand hence lim sup AE < lim sup a log 1 = 0. Choosing yo, 70 > 0 such that7(x) < 7o for y < yo, we get
r00 e- fo 7(x) dx/Edy >
Yoa-v 'yo /Edy = E (1 - e-v0 O
/E)
J0 70 70
This implies lim inf A, > lime log e = 0 and AE -* 0. Similarly, BE -* 0, and(3.7) follows. q

206 CHAPTER VII. RESERVE-DEPENDENT PREMIUMS
The analogue of Example 3.5 for risk processes with exponential claims is as
follows:
Example 3 .6 Assume that B is exponential with rate S. Then the solution of
the Lundberg equation is -y* = b - ,6/p* so that
u
1 dx.I (U) = bu - /3 1 AX)
Note that this expression shows up also in the explicit formula for lk(u) in theform given in Example 3.4. Ignoring 1/5 in the formula there, this leads to (3.6)exactly as in Example 3.5. Further, the slow Markov walk assumption means
5E = b/c, 0, _ ,0/e. Thus 7e(x) _7(x)/e and (3.10) holds if we redefine AE as
AE = flog (j°° efo 7(x)dx/edy _ E/5 I
and similarly for B. As in Example 3.5,
lim sup Af < lim sup c log(1 - 0) = 0.E-+o e-*O
By (3.5) and 7* = 5 -,Q/p*, we have 5 > 7o and get
lim inf AE > lime log Ce 1 - 1 I I > 0.- 7o 5 -
Now (3.7) follows just as in Example 3.5. 0
We next investigate what the upper bound / approximation a-I (°) looks
like in the case p(x) = a + bx (interest) subject to various forms of the tail
B(x) of B. Of course, 7(x) is typically not explicit, so our approach is to
determine standard functions Gl (u), . . . , G. (u) representing the first few terms
in the asymptotic expansion of I(u) as u -+ oo. I.e.,
G,(u) oo, G;+1 (u)Gi (u)
= o( 1), I(u) = G1(u) + ... + Gq(u) + o(G9(u))•
It should be noted , however , that the interchange of the slow Markov walk
limit a -* 0 and the limit u oo is not justified and in fact, the slow Markovwalk approximation deteriorates as x becomes large. Nevertheless , the resultsare suggestive in their form and much more explicit than anything else in theliterature.

3. THE LOCAL ADJUSTMENT COEFFICIENT 207
Example 3 .7 Assume that
B(x) - clxa-le-5x (3.11)
with a > 0. This covers mixtures or convolutions of exponentials or, more gen-erally, phase-type distributions (Example 1 . 2.4) or gamma distributions; in thephase-type case , the typical case is a = 1 which holds , e.g., if the phase gener-ator is irreducible (Proposition VIII. 1.8). It follows from (3.11) that b[s] -* coas s f S and hence 7* T S as p* -+ oo. More precisely,
B[s] = 1 + s exB(x)dx = 1 +c1SF(a) ('+o('))(S - s)C'fo "o
as s T S, and hence (3.1) leads to
(S-7T N Ocpa , ,Y ,:;C2p* C2 = (3clr(a))11',
fu Su a<1I(u) Su - c2 J a + bx 1/
a dx Su - c3 logu a= 10 ( ) Su - c4ul -1/° a > 1
where c3 = c2 /b, c4 = c2b-1/'/(1 - 1/a). q
Example 3 .8 Assume next that B has bounded support, say 1 is the upperlimit and
B(x) - cs(1 - x)n-1, x T 1, (3.12)
with y > 1. For example, 77 = 1 if B is degenerate at 1, y = 2 if B is uniformon (0, 1) and 17 = k + 1 if B is the convolution of k uniforms on (0,1/k). HereB[s] is defined for all s and
B[s] - 1 =$f
e"B(x)dx = e8 J s e-IB ( 1 - y/s)dyo
cse8 f ' e-vy'7-ldy = cse8r(T7)
Sn- 1 f sn -1
as s T oc. Hence (3.1) leads to ,3cse7*I7(77) - ry*°p*,
ry* loge*+ g7loglogp*, I(u) Pt; u(logu + r7loglogu).

208 CHAPTER VII. RESERVE-DEPENDENT PREMIUMS
Example 3 .9 As a case intermediate between (3.11) and (3.12), assume that
B(x) CO -x2/2c7, x f oo . (3.13)
We get
b[s] - 1
C7
e-c78)2/2c7dxCgs o"O
esxe-x2/2c7 dx = cgsec782/2
f0
- css 2%rc7eC782/2,
- logp*, 7* - c8 log , I (u) c8u log u
where c8= 2/c7. 0
3b Proof of Theorem 3.2
We first remark that the definition (3.4) of the local adjustment coefficient isnot the only possible one: whereas the motivation for (3.4) is the formula
hlogEues ( Rh-u) ,•, ,3 (B[s] - 1) - sp(u), h 10, (3.14)
for the m .g.f. of the increment in a small time interval [0, h], one could also have
considered the increment ru (T1) - u - Ul up to the first claim (here ru (•) denotes
the solution of i = p (r) starting from ru(0) = u). This leads to an alternativelocal adjustment coefficient 7o(u) defined as solution of
1 = Ee''o(u)(vi+u-ru(TI)) - B[7o (u)] . 1 3e-Ote7o(u)(u-r^.(t))dt.0
(3.15)
Proposition 3.10 Assume that p(x) is a non-decreasing function of x. Then:(a) -y(x) and 7o(x) are also non-decreasing functions of x;
(b) 'y(x) <'Yo(x)•
Proof That 7(x) is non-decreasing follows easily by inspection of (3.4). Theassumption implies that ru(t) - u is a non-decreasing function of u. Hence for
u<V,
1 = E,e7o ( u)(ul+u -r,.(T1)) > Ee7o(u)(ul+v-r»(Ti)).
By convexity of the m .g.f. of U1 + v - r„(Ti), this is only possible if 7o(v) 2
7o(u)•

3. THE LOCAL ADJUSTMENT COEFFICIENT 209
For (b), note that the assumption implies that ru(t) - u > tp(u). Hence
1
0
= Ee-Yo(u)(U1+u-ru(T1)) < E,e70(u)(U1-P(u)T1)
0 + 7o(u)p(u)'
<_ 00['Yo(u)] - 1) - 7o (u)p(u)•
Since (3.4) considered as function of 7 is convex and 0 for -y = 0, this is onlypossible if -yo(u) > 7(u). q
We prove Theorem 3.2 in terms of 7o; the case of 7 then follows immediatelyby Proposition 3.10(b):
Theorem 3.11 Assume that p(x) is a non-decreasing function of x. Then
(u) < efo Yo(x)dx. (3.16)
Proof Define 411(n)(u) = P('r(u) < on) as the ruin probability after at most nclaims (on = TI + • • • + Tn). We shall show(' by induction that
Y'(n) (u) < e- fo 'Yo(x)dx (3.17)
from which the theorem follows by letting n -+ oo. The case n = 0 is clear sincehere To = 0 so that ik(°)(u) = 0. Assume (3.17) shown for n and let Fu(x) =P(U1 + u - ru(T1) < x). Separating after whether ruin occurs at the first claimor not, we obtain
„I,(n+l) (u)
1 - Fu(u) + J ^(n)(u - x)Fu(dx)3 00
J )+fU efo o (y)dYF
(dx)
/' ful`=
11 Ju
I / 00 e f oFudx) + of u :7o(Y)dYFu(dx) 100
Considering the cases x > 0 and x < 0 separately, it is easily seen that
fux7o(y)dy < x-yo (u). Also, fa 7o(y)dy < u7o(u) < x-yo (u) for x > u. Hence
„/,(n+1) (u) e-fo Yo(x)dxI^"Q exyo(u)Fu(dx )+ J - es'Yo(u)Fu(dx)}
I u o0
e- fo -yo( x)dx j,u[70(u)]
e- fo -yo(x)dx

210 CHAPTER VII. RESERVE-DEPENDENT PREMIUMS
where the last identity immediately follows from (3.15); we used also Proposition3.10(a) for some of the inequalities. 0
It follows from Proposition 3.10(b ) that the bound provided by Theorem
3.11 is sharper than the one given by Theorem 3.2. However, yo(u) appearsmore difficult to evaluate than y(u). Also, for either of Theorems 3.2, 3.11 be
reasonably tight something like the slow Markov walk conditions in Theorem 3.3is required, and here it is easily seen that yo(u) ,: y(u). For these reasons, we
have chosen to work with -y(u) as the fundamental local adjustment coefficient.
3c Proof of Theorem 3.3
The idea of the proof is to bound { R( f) } above and below in a small interval
[x - x/n, x + x/n] by two classical risk processes with a constant p and appeal
to the classical results (3.2), (3.3). To this end, define
uk,n =ku, Pk,n = sup p(x), pk n = inf AX),
uk_l,n uk}1,nn uk-1,n <Z auk}l,n
and, in accordance with the notation i/iE (u), op*. (u), let Op*.;E (u) denote the
ruin probability for the classical model with 0 replaced by ,3/e and U; by €U=.
Lemma 3.12 lim sup4^o -f log O, (u) < I(u).
Proof For ruin to occur, {RtE)} (starting from u = un,n) must first downcross
un-l,n. The probability of this is at least n n;E (u/n), the probability that
ruin occurs in the Cramer-Lundberg model with p* = pn,n (starting from u/n)
without that 2u/n is upcrossed before ruin. Further, given downcrossing occurs,
the value of {R(E)} at the time of downcrossing is < un-l,n so that
n,n;E (u/n) Y'E (un- I,n)
pn niE (u/n) n_1 n;E (u/n) ^•e. (un-2,n)
n
> II v ^k n;E (u/n)k =1
Now as e . 0,
0;.;e (u) = v';. WO ,., C*e- -Y*u /E,
where the first equality follows by an easy scaling argument and the approx-
imation by (3.3). Let Ck,n, ryk,nbe C*, resp. y* evaluated for p* = Pk,n; in

3. THE LOCAL ADJUSTMENT COEFFICIENT 211
particular, since ry' is an increasing function of p', also
ryk,n = sup ?'(x).uk_1,n <X<Uk,,,
Clearly,
*p•;E (u/n) -Op•;E (urn)\
<,
+/
^'
p•;F (2u/n),
OP-*I,n;E (u/n) (u/n) -'T nk,n cE (2u/n)
Ck ne-7k,nu/fn( 1 - e-7k,nu/En)
Ck ne-7k,nu/en(1 + o(1)),
where o(1) refers to the limit e .. 0 with n and u fixed. It follows that
-log V'C (u)
n
log Ypk,,i;! (u/n)k=1
n n
m 7k,n - log Ck,n + 0(1),
limsup-elogv), (u) <CIO
k=1 k=1n
u
E7
_n k,n-
k=1
Letting n -4 oo and using a Riemann sum approximation completes the proof.11
Theorem 3.3 now follows easily in case (a). Indeed , in obvious notation onehas -tC (x) = y(x)/e, so that Theorem 3.2 gives
7PE (u) < e-Ii"i/f = lim inf -Clog 0E (u) > I (u).40
Combining with the upper bound of Lemma 3.12 completes the proof.
In case (b), we need the following condition:
Condition 3.13 There exists a r . v. V < oo such that (i) for any u < oo thereexist Cu < oo and a (u) > supy <„ 7(x) such that
P(V > x) < Cue- a( u)z; (3.18)
(ii) the family of claim overshoot distributions is stochastically dominated by V,i.e. for all x , y > 0 it holds that
F(U>x +yIU>x) B(x + y) < F(V > y). (3.19)
B(x)

212 CHAPTER VII. RESERVE-DEPENDENT PREMIUMS
To complete the proof, let v < u and define
T(E) (u, v ) = inf { t > 0 : R(c) < v R) = u } , ^(E) (u, v ) = v - R<) (u v).
Then
Y'E (u)
=
l
E [,,,^''
,, (R,( . ) (u u /n)) ; T(E) (u, u/n) < oo]
= E [OE (u/n - ^(E) (u, u/n)) ; T() (u, u/n) < oo]
= E [OE (u/n - E(E) (u, u/n)) I T(E) (u, u/n) < oo] . P (T(E) (u, u/n) < oo)
< EV), (u/n - eV) • P (T(E) (u, u/n) < oo) .
Write EO, (u/n - EV) = El + E2, where El is the contribution from the eventthat the process does not reach level 2u/n before ruin and E2 is the rest. Thenthe standard Lundberg inequality yields
El < E?;1 n;E (u/n - EV) = EiI 1,n
(u/En - V)
< e-ry1,nu /EnE [e71,n V; V < u/En] + P(V > u/En)
= e-71 nu/Eno(l)
(using (3.18) for the last equality). For E2, we first note that the number of
downcrossings of 2u/n starting from RoE) = 2u/n is bounded by a geometric r.v.
N with
EN < 1 = infx>2u/nA(x) = 0(1),
1 - of:>2 in n(x);E (0) infx>2u /n P(x) - ,QEU
cf. (3.5) and the standard formula for b(0). The probability of ruin in between
two downcrossings is bounded by
Epp ;E (2u/n - EV) = e- 2-y 1 ' . u/en 0(i)_n
so that
E2 < e-2ryl nu/En0(1), Ei + E2 < e-71,nu/En0(1)

3. THE LOCAL ADJUSTMENT COEFFICIENT
Hence
lim inf -e log Ali, (u)40
lim inf -e log(Ei +E2) + logP (r( `) (u, u/n) < oo{)I40
Unryl n+liminf-elogP (T(')(u,u/n) < oo)- CI
n> u
n ryi n'i=1
213
Another Riemann sum approximation completes the proof. q
Notes and references With the exception of Theorem 3.1, the results are fromAsmussen & Nielsen [39]; they also discuss simulation based upon 'local exponentialchange of measure' for which the likelihood ratio is
( /'t /'t NsLt = exp S - J y(Rs-)dR,) = exp - J -r(Rs)p(R,)ds + -Y(R2;-)Ui } .
l o JJJ o ;=1 J
An approximation similar to (3.7) for ruin probabilities in the presence of an upperbarrier b appears in Cottrell et al. [89], where the key mathematical tool is the deepWentzell-Freidlin theory of slow Markov walks (see e .g. Bucklew [81]). Djehiche [122]gives an approximation for tp(u,T) = P„(info<t <T Rt < 0) via related large deviationstechniques. Comparing these references with the present work shows that in the slowMarkov walk set-up, the risk process itself is close to the solution of the differentialequation
r(x) _ -r (x, 0) (= p(x) -,3EU) (3.20)
(with ic(x, s) as in (3.4) and the prime meaning differentiation w.r.t. s), whereas themost probable path leading to ruin is the solution of
r(x) _ -k (x,7(x)) (3.21)
(the initial condition is r(0) = u in both cases). Whereas the result of [122] is givenin terms of an action integral which does not look very explicit, one can in fact arriveat the optimal path by showing that the approximation for 0(u, T) is maximized overT by taking T as the time for (3.21) to pass from u to 0; the approximation (3.7)then comes out (at least heuristically) by analytical manipulations with the actionintegral. Similarly, it might be possible to show that the limits e . 0 and b T 00
are interchangeable in the setting of [89]. Typically, the rigorous implementation ofthese ideas via large deviations techniques would require slightly stronger smoothnessconditions on p(x) than ours and conditions somewhat different from Condition 3.13,

214 CHAPTER VII. RESERVE-DEPENDENT PREMIUMS
the simplest being to require b[s] to be defined for all s > 0 (thus excluding , e.g., theexponential distribution ). We should like , however , to point out as a maybe much moreimportant fact that the present approach is far more elementary and self-containedthan that using large deviations theory. For different types of applications of largedeviations to ruin probabilities , see XI.3.

Chapter VIII
Matrix-analytic methods
1 Definition and basic properties of phase-typedistributions
Phase-type distributions are the computational vehicle of much of modern ap-plied probability. Typically, if a problem can be solved explicitly when the rele-vant distributions are exponentials, then the problem may admit an algorithmicsolution involving a reasonable degree of computational effort if one allows forthe more general assumption of phase-type structure, and not in other cases. Aproper knowledge of phase-type distributions seems therefore a must for anyoneworking in an applied probability area like risk theory.
A distribution B on (0, oo) is said to be of phase-type if B is the distribu-tion of the lifetime of a terminating Markov process {Jt}t>o with finitely manystates and time homogeneous transition rates. More precisely, a terminatingMarkov process {Jt} with state space E and intensity matrix T is defined asthe restriction to E of a Markov process {Jt}o<t<. on Eo = E U {A} where
A is some extra state which is absorbing, that is, F (Jt = A eventually) = 1 forall i E E 1 and where all states i E E are transient. This implies in particularthat the intensity matrix for { it } can be written in block-partitioned form as
T
00 .
We often write p for the number of elements of E. Note that since (1.1) is
'Here as usual , P; refers to the case Jo = i; if v = (vi)iEE is a probability distribution,we write Pv for the case where Jo has distribution v so that Pv = KER viPi•
215

216 CHAPTER VIII. MATRIX-ANALYTIC METHODS
the intensity matrix of a non-terminating Markov process, the rows sum to onewhich in matrix notation can be rewritten as t + Te = 0 where e is the columnE-vector with all components equal to one. In particular, T is a subintensitymatrix2, and we have
t = -Te. (1.2)
The interpretation of the column vector t is as the exit rate vector, i.e. theith component ti gives the intensity in state i for leaving E and going to theabsorbing state A.
We now say that B is of phase-type with representation (E, a, T) (or some-times just (a,T)) if B is the Pa-distribution of the absorption time C =inf{t > 0 : it = A}, i.e. B(t) = Fa(^ < t ). Equivalently, C is the life-time sup It > 0 : Jt E E} of {Jt}. A convenient graphical representation is thephase diagram in terms of the entrance probabilities ai, the exit rates ti and thetransition rates (intensities) tij:
aii
3tj
aj
ti
tjk
FkJtk
ak
Figure 1.1The phase diagram of a phase-type distribution with 3 phases, E = {i, j, k}.
The initial vector a is written as a row vector.
Here are some important special cases:
Example 1 .1 Suppose that p = 1 and write ,0 = -t11. Then a = a1 =1, t1 = /3, and the phase-type distribution is the lifetime of a particle withconstant failure rate /3, that is, an exponential distribution with rate parameter,3. Thus the phase-type distributions with p = 1 is exactly the class of exponentialdistributions. 0
2this means that tii < 0, tij > 0 for i 54 j and EjEE tij < 0

1. PHASE-TYPE DISTRIBUTIONS 217
Example 1.2 The Erlang distribution EP with p phases is defined Gammadistribution with integer parameter p and density
bp XP-1 -6x
(p- 1)!e
Since this corresponds to a convolution of p exponential densities with the samerate S, the EP distribution may be represented by the phase diagram (p = 3)
Figure 1.2
corresponding to E = {1, . . . , p}, a = (1 0 0 ... 00))
T=
-S s o ... 0 0 00 -S 6 ... 0 0 0
t=0 0 0 ••• -S S 00 0 0 ... 0 -S 6
Example 1.3 The hyperexponential distribution HP with p parallel channels isdefined as a mixture of p exponential distributions with rates 51, ... , 6, so thatthe density is
P
E ai6ie-6,x
i=1
Thus E _
-Si 0 0 ... 0 00 -S2 0 •.. 0 0
T
0 0 0 • • • -Sp-1 00 0 0 •.. 0 -SP
t=
and the phase diagram is (p = 2)

218 CHAPTER VIII. MATRIX-ANALYTIC METHODS
Figure 1.3
0
Example 1 .4 (COXIAN DISTRIBUTIONS) This class of distributions is popularin much of the applied literature, and is defined as the class of phase-typedistributions with a phase diagram of the following form:
1617 ti
2
t2
b2- t2 yt bP- 1 tP-1
1
Figure 1.4
For example, the Erlang distribution is a special case of a Coxian distribution.
The basic analytical properties of phase-type distributions are given by thefollowing result . Recall that the matrix-exponential eK is defined by the stan-dard series expansion Eo K"/n! 3.
Theorem 1 . 5 Let B be phase-type with representation (E, a, T). Then:(a) the c.d.f is B (x) = 1 - aeTxe;(b) the density is b(x ) = B'(x) = aeTxt;(c) the m.g.f. B[s] = f0°O esxB (dx) is a(-sI -T)-lt
(d) the nth moment f0°O xnB(dx) is (- 1)"n! aT-"e.
Proof Let P8 = (p ^) be the s-step EA x EA transition matrix for {Jt } and
P8 the s-step E x E-transition matrix for {Jt} , i.e. the restriction of P8 to E.Then for i , j E E, the backwards equation for {Jt} (e.g. [APQ ] p. 36) yields
s p:dp; . d-. .
ds^= ds' = ttlaj + E t ikpkj = tikpkj.
kEE kEE
3For a number of additional important properties of matrix-exponentials and discussion ofcomputational aspects , see A.3

1. PHASE-TYPE DISTRIBUTIONS 219
That is, d8 P8 = TP8, and since obviously P° = I, the solution is P8 = eT8.Since
1 - B(x) = 1'a (( > x) = P., (Jx E E) = 1: aipF. = aPxe,i,jEE
this proves (a), and (b) then follows from
B'(x) _ -cx Pxe = -aeTxTe = aeTxt
(since T and eTx commute). For (c), the rule (A.12) for integrating matrix-exponentials yields
B[s] = J esxaeTxt dx = a (f°°e(81+T)dx) t
a(-sI - T) -1t.
Alternatively, define hi = Eie8S. Then
h -tit ti + ti3 h j(1.5)
-tii - s - tii j# i -tii
Indeed, - tii is the rate of the exponential holding time of state i and hence(-tii)/(-tii - s) is the m .g.f. of the initial sojourn in state i. After that, weeither go to state j i w.p. tij / - tii and have an additional time to absorptionwhich has m .g.f. hj , or w.p . ti/ - tii we go to A, in which case the time toabsorption is 0 with m .g.f. 1. Rewriting ( 1.5) as
hi(tii + s) = -ti - tij hj, tijhj + his = -ti,
j#i jEE
this means in vector notation that (T + sI)h = -t, i.e. h = -(T + sI)-1t, andsince b[s] = ah, we arrive once more at the stated expression for B[s].
Part (d) follows by differentiating the m.g.f.,
d"(- I - T) -'t
-n-lt1 n+l ! I Ts =dsn a
(- ) n a (s ) ,+
B(n)[0] = (-1)n+1n!aT-n-1t = (-1)nn!aT-n-1Te
_ (-1)nn! aT-ne.
Alternatively, for n = 1 we may put ki = Ei( and get as in (1.5)
ki = 1 + -L j- (1.6)tii -tiij:Ai

220 CHAPTER VIII. MATRIX-ANALYTIC METHODS
which is solved as above to get k = -aT-le. 0
Example 1.6 Though typically the evaluation of matrix-exponentials is mostconveniently carried out on a computer, there are some examples where it is ap-pealing to write T on diagonal form, making the problem trivial. One obviousinstance is the hyperexponential distribution, another the case p = 2 where ex-plicit diagonalization formulas are always available, see the Appendix. Consider
for example
3 9
a= (2 2), T= 2 111 so that
2 2
Then (cf. Example A3.7) the diagonal form of T is
9 9 1 9
T10 70 6 10 70
7 1 7 910 10 0 101
where the two matrices on the r.h.s. are idempotent. This implies that we
compute the nth moment as
(-1)"n! aT -"e
9 9
10 70
7 1
10 101 9
( l+6- "n! (2 2 ) 17 9 0 \ 1 /10 10
1"n! 1 12 2
n!32
+n!35335 6"
Similarly, we get the density as
9 9 6(1 1) 10
aeTyt = e x7 1
20 10
can

1. PHASE-TYPE DISTRIBUTIONS
1 9 6
+e -6x (1 11 10 70 72 2 7 9 2
10 10
35e-x + 18e-6x35
221
The following result becomes basic in Sections 4, 5 and serves at this stageto introduce Kronecker notation and calculus (see A.4b for definitions and basicrules):
Proposition 1.7 If B is phase-type with representation (v,T), then the matrix
m.g.f. B[Q] of B is
f3[Q] = J e'1zB(dx) _ (v (9 I)(-T ® Q)-1(t ® I). (1.7)
Proof According to (A.29) and Proposition A4.4,
B[Q] =
00
fJ veTxteQx dx = (v ® I) (f° eT
x edx I (t I)0
(T®Q)xdx) (
t ® I) _ (v ® I)(-T ® Q)-1(t ® I).(v (& I) (fo o" e
0
Sometimes it is relevant also to consider phase-type distributions, where theinitial vector a is substochastic, hail = E=EE a; < 1. There are two ways to
interpret this:
• The phase-type distribution B is defective, i.e 11BIJ = 1laDD < 1; a randomvariable U having a defective phase-type distribution with representation(a, T) is then defined to be oo on a set of probability 1- 11aDD, or one justlets U be undefined on this additional set.
• The phase-type distribution B is zero-modified, i.e a mixture of a phase-type distribution with representation (a/llall,T) with weight hall andan atom at zero with weight 1 - hall. This is the traditional choice inthe literature, and in fact one also most often there allows a to have acomponent ao at A.

222 CHAPTER VIII. MATRIX-ANALYTIC METHODS
la Asymptotic exponentiality
Writing T on the Jordan canonical form, it is easily seen that the asymptoticform of the tail of a general phase-type distribution has the form
B(x) _ Cxke-nx,
where C, 77 > 0 and k = 0, 1, 2.. .. The Erlang distribution gives an examplewhere k > 0 (in fact, here k = p-1), but in many practical cases, one has k = 0.
Here is a sufficient condition:
Proposition 1.8 Let B be phase-type with representation (a, T), assume that
T is irreducible , let -,q be the eigenvalue of largest real part of T, let v, h be thecorresponding left and right eigenvectors normalized by vh = 1 and define C =ah • ve . Then the tail B(x) is asymptotically exponential,
B(x) - Ce-7'. (1.8)
Proof By Perron-Frobenius theory (A.4c), i is real and positive, v, h can bechosen with strictly positive component, and we have
eTx - hve-7x, x -* oo.
Using B(x) = aeTxe , the result follows (with C = (ah)(ve)). 0
Of course, the conditions of Proposition 1.8 are far from necessary ( a mixture
of phase-type distributions with the respective T(') irreducible has obviouslyan asymptotically exponential tail, but the relevant T is not irreducible, cf.Example A5.8).
In Proposition A5.1 of the Appendix, we give a criterion for asymptoticalexponentiality of a phase-type distribution B, not only in the tail but in thewhole distribution.
Notes and references The idea behind using phase-type distributions goes back
to Erlang, but todays interest in the topic was largely initiated by M.F. Neuts, see his
book [269] (a historical important intermediate step is Jensen [214]). Other expositionsof the basic theory of phase-type distributions can be found in [APQ], Lipsky [247],Rolski, Schmidli, Schmidt & Teugels [307] and Wolff [384]. All material of the present
section is standard; the text is essentially identical to Section 2 of Asmussen [26].In older literature, distributions with a rational m.g.f. (or Laplace transform) are
often used where one would now work instead with phase-type distributions. See inparticular the notes to Section 6. O'Cinneide [276] gave a necessary and sufficient
for a distribution B with a rational m.g.f. B[s] = p(s)/q(s) to be phase-type: the
density b(x) should be strictly positive for x > 0 and the root of q(s) with the smallest
real part should be unique (not necessarily simple, cf. the Erlang case). No satisfying

2. RENEWAL THEORY 223
algorithm for finding a phase representation of a distribution B (which is known to bephase-type and for which the m.g.f. or the density is available ) is, however, known.A related important unsolved problem deals with minimal representations: given a
phase-type distribution , what is the smallest possible dimension of the phase space
E?
2 Renewal theory
A summary of the renewal theory in general is given in A.1 of the Appendix,but is in part repeated below. Let U1, U2, ... be i.i.d. with common distribution
B and define4
U(A) = E# {n = 0,1, ...: U1 + ... +UnEA}00
= EEI(U1 +...+UnEA).n=O
We may think of the U; as the lifetimes of items (say electrical bulbs) which arereplaced upon failure, and U(A) is then the expected number of replacements(renewals) in A. For this reason, we refer to U as the renewal measure; if U is
absolutely continuous on (0, oo) w.r.t. Lebesgue measure, we denote the densityby u(x) and refer to u as the renewal density. If B is exponential with rate0, the renewals form a Poisson process and we have u(x) = 0. The explicitcalculation of the renewal density (or the renewal measure) is often thoughtof as infeasible for other distributions, but nevertheless, the problem has analgorithmically tractable solution if B is phase-type:
Theorem 2.1 Consider a renewal process with interarrivals which are phase-
type with representation (cr,T). Then the renewal density exists and is givenby
u(x) = ae(T+ta)xt. (2.1)
Proof Let {Jtk)} be the governing phase process for Uk and define {Jt} by
piecing the { J(k) } together,
JtJt1) 0<t<U1 , Jt={Jt?ul}, U1<t < U1+U2, ....
Then {it }
is Markov and has two types of jumps , the jumps of the j(k) and the
jumps corresponding to a transition from oneJt
k) to the next J(k+l) A jump
4Here the empty sum U1 +... + U0 is 0

224 CHAPTER VIII. MATRIX-ANALYTIC METHODS
of the last type from i to j occurs at rate tiaj , and the jumps of the first typeare governed by T. Hence the intensity matrix is T + ta, and the distributionof Jx is ae (T+t«)x. The renewal density at x is now just the rate of jumps ofthe second type, which is ti in state i. Hence (2.1) follows by the law of totalprobability. q
The argument goes through without change if the renewal process is termi-nating, i.e. B is defective , and hence (2.1) remains valid for that case. However,the phase-type assumptions also yield the distribution of a further quantity offundamental importance in later parts of this chapter , the lifetime of the renewalprocess . This is defined as U1 + ... + Uit_1 where s; is the first k with Uk = 00,that is , as the time of the last renewal; since Uk = oo with probability 1 - IIBIIwhich is > 0 in the defective case, this is well-defined.
Corollary 2.2 Consider a terminating renewal process with interarrivals whichare defective phase-type with representation (a,T), i.e . IIafl < 1. Then thelifetime is zero-modified phase-type with representation (a,T + ta).
Proof Just note that { it } is a governing phase process for the lifetime. q
Returning to non-terminating renewal processes , define the excess life e(t)at time t as the time until the next renewal following t, see Fig. 2.1.
fi(t)
U2
U1 U3
- U1 U2 U3 U4
Figure 2.1
Corollary 2.3 Consider a renewal process with interarrivals which are phase-
type with representation (a, T), and let µB = -aT-le be the mean of B. Then:
(a) the excess life t(t) at time t is phase-type with representation (vt,T) wherevt = ae (T+ta)t .,(b) £(t) has a limiting distribution as t -* oo, which is phase-type with repre-sentation (v,T) where v = -aT-1 /µB. Equivalently, the density is veTxt =B(x)/µB.

2. RENEWAL THEORY 225
Proof Consider again the process { Jt } in the proof of Theorem 2.1. The time
of the next renewal after t is the time of the next jump of the second type, hencee(t) is phase-type with representation (vt,T) where vt is the distribution of itwhich is obviously given by the expression in (a). Hence in (b) it is immediatethat v exists and is the stationary limiting distribution of it, i.e. the uniquepositive solution of
ve = 1, v(T + ta) = 0.
Here are two different arguments that this yields the asserted expression:
(i) Just check that -aT-1/µB satisfies (2.2):
-aT-1 e = AB = 1
µB µB
-aT-1(T + ta) -a + aT-'Tea
µB PB-a + aea -a + a
µB µB=0.
(2.2)
(ii) First check the asserted identity for the density: since T, T-1 and eTxcommute, we get
B(x) aeTxe aT-1eTxTe
µB µB PB= veTxt.
Next appeal to the standard fact from renewal theory that the limitingdistribution of e(x ) has density B(x)/µB, cf. Al.e. q
Example 2 .4 Consider a non-terminating renewal process with two phases.The formulas involve the matrix-exponential of the intensity matrix
Q = T + to =( tll + tlal
t12 + t2altlz + tlaz _ -q1 ql
t22 + t2a2 q2 -q2(say).
According to Example A3.6, we first compute the stationary distribution of Q,
= qz ql(x1 xz) =
ql + qz ql + q '
and the non-zero eigenvalue A = -ql - q2. The renewal density is then
aeQtt = (al a2) ( 7i 7"2.) ( t2 )

226 CHAPTER VIII. MATRIX-ANALYTIC METHODS
+ e;`t (al a2) C 172 -r1 ir12 / \ t
11
2 )
(7r1 7r2) ( t2 J+ eAt (al a2) ( 71(t2 - tl)
7rltl + 7r2t2 + eat (a17r2 - a27rl) (tl - t2)
1 + eat (a17r2 - a27r1) (t1 - t2) .t1B
0
Example 2 .5 Let B be Erlang(2). Then
Q= 0 55)+(1o)=( j ad ).
Hence 7r = (1/2 1/2), A = -25, and Example 2.4 yields the renewal density as
u(t) = 2 (1 - e-2bt)
13
Example 2 .6 Let B be hyperexponential. Then
51Q
_
0
Hence
0-52
_ -5152 51a2+
5251
) (al a2) 52a1 -62a1
Slat + 52a151a2
51a2+52a1
A = -51a2 - 52a1, and Example 2.4 yields the renewal density as
u(t) = 5152 e- (biaz +aza, )t (51 - 52) 2515251x2+5251 51a2+5251
Notes and references Renewal theory for phase-type distributions is treated in
Neuts [268] and Kao [221]. The present treatment is somewhat more probabilistic.

3. THE COMPOUND POISSON MODEL 227
3 The compound Poisson model
3a Phase-type claims
Consider the compound Poisson (Cramer-Lundberg) model in the notation ofSection 1, with 0 denoting the Poisson intensity, B the claim size distribu-tion, r(u) the time of ruin with initial reserve u, {St} the claim surplus pro-cess, G+(.) = F(ST(o) E •, T(0) < oo) the ladder height distribution and M =supt>o St. We asssume that B is phase-type with representation (a, T).
Corollary 3.1 Assume that the claim size distribution B is phase-type withrepresentation (a, T). Then:(a) G+ is defective phase-type with representation (a+, T) where a+ is givenby a+ = - f3aT-1, and M is zero-modified phase-type with representation(a+, T + to+).(b) V,(u) = a+e(T+tQ+)u
Note in particular that p = IIG+II = a+e.
Proof The result follows immediately by combining the Pollaczeck-Khinchineformula by general results on phase-type distributions: for (a), use the phase-type representation of Bo, cf. Corollary 2.3. For (b), represent the maximum Mas the lifetime of a terminating renewal process and use Corollary 2.2.
Since the results is so basic, we shall, however, add a more self-containedexplanation of why of the phase-type structure is preserved. The essence iscontained in Fig. 3.1 on the next page. Here we have taken the terminatingMarkov process underlying B with two states, marked by thin and thick lines onthe figure. Then each claim (jump) corresponds to one (finite) sample path of theMarkov process. The stars represent the ladder points ST+(k). Considering thefirst, we see that the ladder height Sr+ is just the residual lifetime of the Markovprocess corresponding to the claim causing upcrossing of level 0, i.e. itself phase-type with the same phase generator T and the initial vector a+ being thedistribution of the upcrossing Markov process at time -ST+_. Next, the Markovprocesses representing ladder steps can be pieced together to one {my}. Withinladder steps, the transitions are governed by T whereas termination of laddersteps may lead to some additional ones: a transition from i to j occurs if theladder step terminates in state i, which occurs at rate ti, and if there is asubsequent ladder step starting in j whic occurs w.p. a+j. Thus the total rateis tip + tia+.i, and rewriting in matrix form yields the phase generator of {my}as T + ta+. Now just observe that the initial vector of {mx} is a+ and thatthe lifelength is M.

228 CHAPTER VIII. MATRIX-ANALYTIC METHODS
{mx}
t-- M----------------------------------------
ST+-(2-) ---------
.,.t
td kkt
--S.-------
Figure 3.1
S
This derivation is a complete proof except for the identification of a+ with-,QaT-1. This is in fact a simple consequence of the form of the excess distri-bution B0, see Corollary 2.3. 0
Example 3.2 Assume that ,Q = 3 and
b(x) = - 1 , 3e-3x + - . 7e-7x2 2
Thus b is hyperexponential (a mixture of exponential distributions) with a
(2 2 ), T = (-3 - 7)diag so that
a+ = -QaT 1 = -3 (2 2) 03
T+ta+ =30 07/+( 7I \ 2 14
3 9
2 14
7 11
2 2

4. THE RENEWAL MODEL
This is the same matrix as is Example 1.6, so that as there
e(T+ta+)u
Thus
9 9
10 10 10 10
,^(u) = a+e(T+ta+)ue = 24e-u + 1 e-6u35 35
229
0
Notes and references Corollary 3.1 can be found in Neuts [269] (in the settingof M/G/1 queues, cf. the duality result given in Corollary 11.4.6), but that such asimple and general solution exists does not appear to have been well known to therisk theoretic community. The result carries over to B being matrix-exponential,see Section 6. In the next sections, we encounter similar expressions for the ruinprobabilities in the renewal- and Markov-modulated models, but there the vector a+is not explicit but needs to be calculated (typically by an iteration).
The parameters of Example 3.2 are taken from Gerber [157]; his derivation of +'(u)is different.
For further more or less explicit computations of ruin probabilities, see Shin [340].It is notable that the phase-type assumption does not seem to simplify the compu-
tation of finite horizon ruin probabilities substantially. For an attempt, see Stanford
& Stroinski [351] .
4 The renewal model
We consider the renewal model in the notation of Chapter V, with A denotingthe interarrival distribution and B the service time distribution. We assumep = PB/µA < 1 and that B is phase-type with representation (a, T). We shallderive phase-type representations of the ruin probabilities V) (u), 0(8) (u) (recall
that z/i(u) refers to the zero-delayed case and iY(8) (u) to the stationary case). Forthe compound Poisson model, this was obtained in Section 3, and the argumentfor the renewal case starts in just the same way (cf. the discussion around Fig.3.1 which does not use that A is exponential) by noting that the distributionG+ of the ascending ladder height ST+ is necessarily (defective) phase-type with
representation (a+, T) for some vector a+ = (a+;j). That is, if we define {mz}just as for the Poisson case (cf. Fig. 3.1):
1 9
e_u 10 70
) + e6'4 (
10 70
7 1 7 9
Proposition 4.1 In the zero-delayed case,(a) G+ is of phase-type with representation (a+,T), where a+ is the (defective)

230 CHAPTER VIII. MATRIX-ANALYTIC METHODS
distribution of mo;(b) The maximum claim surplus M is the lifetime of {mx};
(c) {mx } is a (terminating) Markov process on E, with intensity matrix Q givenby Q = T + to+.
The key difference from the Poisson case is that it is more difficult to evaluatea+. In fact, the form in which we derive a+ for the renewal model is as theunique solution of a fixpoint problem a+ = cp(a+), which for numerical purposescan be solved by iteration. Nevertheless, the calculation of the first ladder heightis simple in the stationary case:
Proposition 4.2 The distribution G(s) of the first ladder height of the claim
surplus process {Ste) } for the stationary case is phase-type with representation
(a(8),T), where a(8) = -aT-1/PA.
Proof Obviously, the Palm distribution of the claim size is just B. Hence by
Theorem 11.6.5, G(') = pBo, where B0 is the stationary excess life distributioncorresponding to B. But by Corollary 2.3, B0 is phase-type with representation
(-aT-1/µa,T)• q
Proposition 4.3 a+ satisfies a+ = V(a+), where
w(a+) = aA[T + to+) = a J e(T+t-+)1A(dy). (4.1)0
Proof We condition upon T1 = y and define {m.*} from {St+y - Sy-} in thesame way as {mx} is defined from {St}, cf. Fig. 4.1. Then {m,*'} is Markov withthe same transition intensities as {mx}, but with initial distribution a ratherthan a+. Also, obviously mo = m. Since the conditional distribution of my
given T1 = y is ae4y, it follows by integrating y out that the distribution a+of mo is given by the final expression in (4.1). q
We have now almost collected all pieces of the main result of this section:
Theorem 4 .4 Consider the renewal model with interarrival distribution A and
the claim size distribution B being of phase-type with representation (a,T).Then

4. THE RENEWAL MODEL
{mx}
y ^--
I- M----------------------------- •..
------------------- ----------
T1= y
-`•r---------------
i231
Figure 4.1
,^(u) = a+e (T+ta+)xe, , (8)(u) = a ( 8)e(T+ta+)xe, (4.2)
where a+ satisfies (4.1) and a(8) _ -aT-1/pA. Furthermore , a+ can becomputed by iteration of (4.1), i.e. by
a+ = lim a+n) where a+°) - 0, a+l ) = cp (a+°)) , a+2) = ^p (a+l)) , ....
(4.3)
Proof The first expression in (4.2 ) follows from Proposition 4.1 by noting thatthe distribution of mo is a+. The second follows in a similar way by noting thatonly the first ladder step has a different distribution in the stationary case, andthat this is given by Proposition 4.2; thus , the maximum claim surplus for thestationary case has a similar representation as in Proposition 4.1(b), only withinitial distribution a(*) for mo.
It remains to prove convergence of the iteration scheme (4.3). The term tf3 incp(i3) represents feedback with rate vector t and feedback probability vector (3.Hence ^p(,3) (defined on the domain of subprobability vectors ,0) is an increasing
function of /3 . In particular , a+) > 0 = a+o ) implies
a+) _ (a+)> W (a+)) = a+)

232 CHAPTER VIII. MATRIX-ANALYTIC METHODS
and (by induction ) that { a+ n) } is an increasing sequence such that limn,. a+ )
exists . Similarly, 0 = a+) < a+ yields
a+) _ (a+0)) (a+) = a+
and by induction that a(n) < a+ for all n . Thus , limn-4oo a ( n) < a+.
To prove the converse inequality, we use an argument similar to the proofof Proposition VI.2.4. Let Fn = {T1 + • • • + Tn+1 > r+}be the event that {my}
has at most n arrivals in [T1, 7-+ ], and let &+".) = P(mTl = i; Fn ). Obviously,
&+n) T a+, so to complete the proof it suffices to show that &+n) < a+) for alln. For n = 0, both quantities are just 0 . Assume the assertion shown for n - 1.Then each subexcursion of {St+Tl - ST,-} can contain at most n - 1 arrivals(n arrivals are excluded because of the initial arrival at time T1 ). It follows that
on Fn the feedback to {mz} after each ladder step cannot exceed &+n-1) so that
a+ n) < a fo^ e(T+t&+ -1))YA(dy)
a is e(T+t«+-1')YA(dy) _ w (a+-1)) = a+n).<0
0We next give an alternative algorithm, which links together the phase-type
setting and the classical complex plane approach to the renewal model (seefurther the notes). To this end, let F be the distribution of U1 - T1. Then
F[s] = a(-sI - T)-'t • A[-s] (4.4)
whenever EeR(S)U < oo. However, (4.4) makes sense and provides an analyticcontinuation of F[•] as long as -s ¢ sp(T).
Theorem 4.5 Let s be some complex number with k(s) > 0, -s ¢ sp(T).
Then -s is an eigenvalue of Q = T + ta+ if and only if 1 =,P[s] = A[-s]B[s],with B[s], F[s] being interpreted in the sense of the analytical continuation ofthe m.g.f. In that case, the corresponding right eigenvector may be taken as(-sI - T)-It.
Proof Suppose first Qh = -sh. Then e4'h = e-82h and hence
-sh = Qh = (T + taA[Q])h = Th + A[-s]tah. (4.5)
Since -s $ sp(T), this implies that ahA[-s] # 0, and hence we may assume
that h has been normalized such that ahA[-s] = 1. Then (4.5) yields h =(-sI - T)-1t. Thus by (4.4), the normalization is equivalent to F(s) = 1.

4. THE RENEWAL MODEL 233
Suppose next F(s) = 1. Since R(s) > 0 and G _ is concentrated on (-oo, 0),we have IG_ [s] I < 1 , and hence by the Wiener-Hopf factorization identity (A.9)we have G+[s] = 1 which according to Theorem 1.5(c) means that a+(-sI -T)-1t = 1. Hence with h = (-sI -T)- lt we get
Qh = (T + to+)h = T(-sI - T)-lt + t = -s(-sI - T)-lt = -sh.
Let d denote the number of phases.
Corollary 4.6 Suppose u < 0,' that the equation F(s) = 1 has d distinctroots p1, ... , Pd in the domain ER(s) > 0 , and define hi = (-piI - T)-It,Q = CD-1 where C is the matrix with columns hl,..., hd, D that with columns-p1 hl, ... , -pdhd. Then G+ is phase-type with representation (a+, T) witha+ = a(Q-T)/at. Further, letting vi be the left eigenvector of Q correspond-ing to -pi and normalised by vihi = 1 , Q has diagonal form
d d
Q = -dpivi®hi = -dpihivi. (4.6)i=1 i=1
Proof Appealing to Theorem 4.5, the matrix Q in Theorem 2.1 has the d dis-tinct eigenvalues - p1i ... , -Pd with corresponding eigenvectors hl,..., hd. Thisimmediately implies that Q has the form CD-1 and the last assertion on thediagonal form . Given T has been computed, we get
at a(Q - T) = 1 ata+ = a+.
Notes and references Results like those of the present section have a long history,and the topic is classic both in risk theory and queueing theory (recall that we canidentify 0(u) with the tail P(W > u) of the GI/PH /1 waiting time W; in turn,
W v M(d) in the notation of Chapter V). In older literature , explicit expressions forthe ruin/queueing probabilities are most often derived under the slightly more generalassumption that b is rational (say with degree d of the polynomial in the denominator)as discussed in Section 6. As in Corollary 4.6, the classical algorithm starts by lookingfor roots in the complex plane of the equation f3[y]A[-ry] = 1, t(ry) > 0. The rootsare counted and located by Rouche' s theorem (a classical result from complex analysisgiving a criterion for two complex functions to have the same number of zeros withinthe unit circle). This gives d roots 'y,,. .. , -yd satisfying R(ryi) > 0, and the solution is

234 CHAPTER VIII. MATRIX-ANALYTIC METHODS
then in transform termsd
F1 + a J e°" ip(u) du = Ee°w =
d
(see, e .g., Asmussen & O'Cinneide [41] for a short self- contained derivation). In risk
theory, a pioneering paper in this direction is Tacklind [373], whereas the approachwas introduced in queueing theory by Smith [350]; similar discussion appears in Kem-
perman [227] and much of the queueing literature like Cohen [88].This complex plane approach has been met with substantial criticism for a number
of reasons like being lacking probabilistic interpretation and not giving the waiting timedistribution / ruin probability itself but only the transform. In queueing theory, an
alternative approach (the matrix-geometric method ) has been developed largely by
M.F. Neuts and his students, starting around in 1975. For surveys , see Neuts [269],
[270] and Latouche & Ramaswami [241]. Here phase-type assumptions are basic, but
the models solved are basically Markov chains and -processes with countably many
states (for example queue length processes ). The solutions are based upon iterations
schemes like in Theorem 4.4; the fixpoint problems look like
R=Ao+RAI+R2A2+ ,
where R is an unknown matrix, and appears already in some early work by Wallace[377]. The distribution of W comes out from the approach but in a rather complicated
form . The matrix-exponential form of the distribution was found by Sengupta [335]
and the phase-type form by the author [18].The exposition here is based upon [18], which contains somewhat stronger results
concerning the fixpoint problem and the iteration scheme. Numerical examples appear
in Asmussen & Rolski [43].For further explicit computations of ruin probabilities in the phase-type renewal
case , see Dickson & Hipp [118], [119].
5 Markov-modulated input
We consider a risk process {St } in a Markovian environment in the notation
of Chapter VI. That is , the background Markov process with p states is {Jt},
the intensity matrix is A and the stationary row vector is ir . The arrival rate
in background state i is a; and the distribution of an arrival claim is B;. Weassume that each B ; is phase-type , with representation say (a(' ), T('), E(t)).
The number of elements of El=> is denoted by q;.It turns out that subject to the phase-type assumption , the ruin probability
can be found in matrix-exponential form just as for the renewal model, involving
11(--t,)

5. MARKOV-MODULATED INPUT 235
some parameters like the ones T or a+ for the renewal model which need to bedetermined by similar algorithms.
We start in Section 5a with an algorithm involving roots in a similar manneras Corollary 4.6. However, the analysis involves new features like an equivalencewith first passage problems for Markovian fluids and the use of martingales(these ideas also apply to phase-type renewal models though we have not giventhe details). Section 5b then gives a representation along the lines of Theorem4.4. The key unknown is the matrix K, for which the relevant fixpoint problemand iteration scheme has already been studied in VI.2.
5a Calculations via fluid models. Diagonalization
Consider a process {(It, Vt)}t>o such that {It} is a Markov process with a finitestate space F and {Vt} has piecewiese linear paths, say with slope r(i) on inter-vals where It = i. The version of the process obtained by imposing reflection onthe V component is denoted a Markovian fluid and is of considerable interest intelecommunications engineering as model for an ATM (Asynchronuous TransferMode) switch. The stationary distribution is obtained by finding the maximumof the V-component of the version of {(It,Vt)} obtained by time reversing theI component. This calculation in a special case gives also the ruin probabilitiesfor the Markov-modulated risk process with phase-type claims. The connectionbetween the two models is a fluid representation of the Markov-modulated riskprocess given in Fig. 5.1.
(a)
0
0♦ o ° tl
o ♦ • 0 0o } o
(b)
♦ 00 } •o f o
Figure 5.1
In Fig. 5.1, p = ql = Q2 = 2. The two environmental states are denoted o, •,the phase space E(°) for B. has states o, O, and the one E(•) for B. states

236 CHAPTER VIII. MATRIX-ANALYTIC METHODS
4, 4. A claim in state i can then be represented by an E()-valued Markovprocess as on Fig. 5.1(a). The fluid model on Fig . 5.1(b) {(It ,Vt)} is thenobtained by changing the vertical jumps to segments with slope 1. Thus F =
{o, o, V, •, 4, 4}. In the general formulation , F is the disjoint union of E andthe Eli),
F = E U { (i, a) : i E E, a E E(i) } , r(i) _ -1, i E E, r(i, a) = 1.
The intensity matrix for {It} is (taking p = 3 for simplicity)
I '31a(1) 0 0A - (Ni)diag 0 f32a(2) 0
0 0 '33a(3)AI = t(1) 0 0 T1 0 0
0 t(2) 0 0 T(2) 00 0 t(3) 0 0 T(3)
The reasons for using the fluid representation are twofold. First, the probabilityin the Markov-modulated model of upcrossing level u in state i of {Jt} andphase a E Eli) is the same as the probability that the fluid model upcrosseslevel u in state (i, a) of {It}. Second, in the fluid model Eel', < oo for all s, t,whereas Ee8s' = oo for all t and all s > so where so < oo. This implies that inthe fluid context, we have more martingales at our disposal.
Recall that in the phase-type case, Bi[s] = -a(i)(T(i) + sI)-it('). Let Edenote the matrix
-,31a(l) 0 0(/3i)diag - A 0 - 92a(2) 0
0 0 -f33a(3)Or 1A/ _ t(i) 0 0 T1 0 0
0 t(2) 0 0 T(2) 0
0 0 t(3) 0 0 T(3)
with the four blocks denoted by Ei„ i, j = 1, 2, corresponding to the partitioning
of E into components indexed by E, resp. Eli) + + Epp).
Proposition 5.1 A complex number s satisfies
'A+ (f3i(Bi[-s] - 1))diag + sII = 0 (5.1)
if and only if s is an eigenvalue of E. If s is such a number, consider the
vector a satisfying (A + (13i(Bi[-s] - 1))diag) a = -sa and the eigenvector b =

5. MARKOV-MODULATED INPUT 237
(a> of 0* 1 AI, where c , d correspond to the partitioning of b into components
indexed by E, resp . E(1) + + E(P). Then (up to a constant)
c = a, d = (sI -E22)-1E21a
= E ai(sI - T('))-1t(i) .
iEE
Proof Using the well-known determinant identity
Ell E12
E21 E22E22 I ' I Ell - E12E22 E21 I ,
with Eii replaced by Eii - sI, it follows that if
-Qla(1) 0 0(/3i)diag - A - sI 0 -,32a(2) 0
0 0 -Nla(1)
t(1) 0 0 T 1- sI 0 0= 0,
0 t(2) 0 0 T(2) - sI 0
then
0
also
0 t(3) 0 0 T(3) - sI
I = 0()3i)diag - A - sI+ ((3ia(i)(T(i) - sI)-1t))iag
which is the same as (5.1).For the assertions on the eigenvectors, assume that a is chosen as asserted
which means
(Ell - sI + E12 (sI - E22)-1 E21) a = 0,
and let d = (sI - E22)-1 E21a, c = a. Then
E21c+E22d = E21a - (sI - E22 - sI) (sI - E22)-1 E21a
E21a - E21a + sd = sd.
Noting that E11c + E12d = se by definition, it follows that
Ell E12
21 E22) (d) = s 1 d I .( E
0

238 CHAPTER VIII. MATRIX-ANALYTIC METHODS
Theorem 5.2 Assume that E = Or 'Al has q = ql + + qp distinct eigen-
values si, ... , sq with $2s,, < 0 and let b(v) = I d(„)) be the right eigenvector
corresponding to s,,, v = 1, . . . , q. Then
,,/' u = e' (esiuc ( 1) ... e89uc(e)) (d(1) ... d("))-1 e.
Proof Writing Or-'Alb( v) = svb ( v) as (AI - O,.sv)b(v) = 0, it follows by Propo-
sition II.5.4 that {e--"1b(v) is a martingale . For u, v > 0, define
w(u,v)=inf{t >0:Vtu orVt=-v}, w(u)=inf{t >O:Vt-u},
pi(u, v; j, a) = Pi (Vw(u,v) = u) Iw(u,v) = (j, a)),
pi(u , v; j) = I' i(Vw(u,v) = -v) I,(u,v) = j),pi(u ; j, a) = P2 (w (u) < oo, Iw(u,v) = (j, a)).
Optional stopping at time w (u, v) yields
vC{V) = e8 ,upi(u, v; j, a)d(a + e8°vpi (u ,v;j)c .
Letting v -^ oo and using Rsv < 0 yields
u = Epi(u;j,a)d^ ).e8' cj,a
Solving for the pi(u; j, a) and noting that i1 (u) = >I j,,,,pi(u; j, a), the result
follows. q
Example 5 .3 Consider the Poisson model with exponential claims with rate5. Here E has one state only. To determine 0 (u), we first look for the negative
eigenvalue s of E = I -0 I which is s = -ry with yy = b -,Q. We can take
a = c = 1 and get d = (s + b)-16 = 5/(3 = 1/p. Thus 0(u) = esu/d = pe-7 ° as
should be. q
Example 5 .4 Assume that E has two states and that B1, B2 are both expo-
nential with rates 51 i b2. Then we get V)i (u) as sum of two exponential terms
where the rates s1, s2 are the negative eigenvalues of
E _
Al +01 -A1
-A2 A2 +32b1 00 52

5. MARKOV-MODULATED INPUT 239
5b Computations via K
Recall the definition of the matrix K from VI.2. In terms of K, we get thefollowing phase-type representation for the ladder heights (see the Appendixfor the definition of the Kronecker product 0 and the Kronecker sum ®):
Proposition 5.5 G+(i, j; •) is phase-type with representation (E(i), 8^')IT(j))
wheree3^') =,33(e= 0 a(j))(-K ®T (j))(ej (9 I).
Proof We must show that
G+ (i, j; (y, oo)) (') a T(j)ye.
However , according to VI.(2.2) the l.h.s. is
0/3 f R(i , j; dx)Bj(y - x)
00f ° (')
,3j eye-xxej • a (j) eT (y-y)edx
00
0
fooel e (j) T(')x T(j)y
,Qj eie ej a e dx e e
00 eKx ® eT(')'dx (ej (& I)eT(')ye
00eKa®T(')x dx (ej (9 I)eT(') Ye
e(i)eT(')ye.
0
Theorem 5 .6 For i E E, the Pi-distribution of M is phase-type with repre-
sentation (E(1) + + E(P), 9('), U) where
t(j) + t(j)O(j j = k
uja,k.y =to Bk7 j # k
In particular,
i,b (u) = Pi(M > u) = 9(i)euue. (5.3)

240 CHAPTER VIII. MATRIX-ANALYTIC METHODS
Proof We decompose M in the familiar way as sum of ladder steps . Associatedwith each ladder step is a phase process, with phase space EU> whenever thecorresponding arrival occurs in environmental state j (the ladder step is of typej). Piecing together these phase processes yields a terminating Markov processwith state space EiEE E('), intensity matrix U, say, and lifelength M, and itjust remains to check that U has the asserted form. Starting from Jo = i, theinitial value of (i, a) is obviously chosen according to e(`). For a transition from(j, a) to (k, ,y) to occur when j # k, the current ladder step of type j must
terminate , which occurs at rate t(i), and a new ladder step of type k must start
in phase y, which occurs w.p. Bk7 . This yields the asserted form of uja,k y. For
j = k, we have the additional possibility of a phase change from a to ry within
the ladder step, which occurs at rate t^^7. q
Notes and references Section 5a is based upon Asmussen [21] and Section 5bupon Asmussen [17]. Numerical illustrations are given in Asmussen & Rolski [43].
6 Matrix-exponential distributions
When deriving explicit or algorithmically tractable expressions for the ruin prob-ability, we have sofar concentrated on a claim size distribution B of phase-type.However, in many cases where such expressions are available there are classicalresults from the pre-phase-type-era which give alternative solutions under theslightly more general assumption that B has a Laplace transform (or, equiva-lently, a m.g.f.) which is rational, i.e. the ratio between two polynomials (forthe form of the density, see Example 1.2.5). An alternative characterization isthat such a distribution is matrix-exponential, i.e. that the density b(x) can be
written as aeTxt for some row vector a, some square matrix T and some col-umn vector t (the triple (a, T, t) is the representation of the matrix-exponentialdistribution/density):
Proposition 6.1 Let b(x) be an integrable function on [0, oo) and b* [0] =f °O e-Bxb(x) dx the Laplace transform. Then b*[0] is rational if and only b(x) ismatrix-exponential. Furthermore, if
b* [0] =b1 +b20+b302 +... +bn0i-1
0n +a10n-1 +... +aii-10+anI
then a matrix-exponential representation is given by b(x) = aeTxt where
a = (b1 b2 ... bn-1 bn), t = (0 0 ... 0 1)', (6.2)

6. MATRIX-EXPONENTIAL DISTRIBUTIONS 241
T =
0 1 0 0 0 ... 0 00 0 1 0 0 ... 0 0
.. .(6.3)0 0 0 0 0 ... 0 1
-an -an-1 -an_2 -an_3 -an_4 ... -a2 -a1
Proof If b(x) = aeTxt, then b*[0] = a(0I -T)-1t which is rational since eachelement of (01 - T)-1 is so. Thus, matrix-exponentiality implies a rationaltransform. The converse follows from the last statement of the theorem. For aproof, see Asmussen & Bladt [29] (the representation (6.2), (6.3) was suggestedby Colm O'Cinneide, personal communication). q
Remark 6.2 A remarkable feature of Proposition 6.1 is that it gives an explicitLaplace tranform inversion which may appear more appealing than the firstattempt to invert b* [0] one would do, namely to asssume the roots 6l, . . . , bn ofthe denominator to be distinct and expand the r.h.s. of (6.1) as E 1 c;/(0 + bi),giving b(x) = E 1 cie-biz/bY. q
Example 6 .3 A set of necessary and sufficient conditions for a distribution tobe phase-type are given in O'Cinneide [276]. One of his elementary criteria,b(x) > 0 for x > 0, shows that the distribution B with density b(x) = c(1 -cos(21r x))e-x, where c = 1 + 1/47r 2, cannot be phase-type.
Writingb(x) = c(-e(2ni-1 )y/2 - e(-tai-1)x/2 + e-'T)
it follows that a matrix-exponential representation ()3, S, s) is given by
27r i - 1 0 0 f -c/2)3 = (111), S = 0 -21ri - 1 0 , s = -c/2 . (6.4)
0 0 -1 c
This representation is complex, but as follows from Proposition 6.1, we canalways obtain a real one (a, T, t). Namely, since
1 + 4ir2
03 + 302 + (3 + 47x2)0 + 1 + 47r2
it follows by (6.2), (6.3) that we can take
0 1 0 0a= (1 + 47r2 0 0), T= 0 0 1 , t= 0 .
-1 - 47r2 -3 - 47x2 -3 1
0

242 CHAPTER VIII. MATRIX-ANALYTIC METHODS
Example 6 .4 This example shows why it is sometimes useful to work withmatrix-exponential distributions instead of phase-type distributions: for di-mension reasons . Consider the distribution with density
b(x)=
157 + 155e-x
((2e-2x - 1)2 + 6).
Then it is known from O'Cinneide [276] that b is phase-type when 6 > 0, andthat the minimal number of phases in a phase-type representation increases to
0o as 5 , 0, leading to matrix calculus in high dimensions when b is small. But
since
15(1 +6)02 + 1205 0 + 2255 + 105b* [9] _ (7 + 155)03 + (1355 + 63)92 + (161 + 3455)9 + 2256 + 105
Proposition 6.1 shows that a matrix-exponential representation can always be
obtained in dimension only 3 independently of J. q
As for the role of matrix-exponential distributions in ruin probability calcu-lations, we shall only consider the compound Poisson model with arrival rate 0and a matrix-exponential claim size distribution B, and present two algorithms
for calculating '(u) in that setting.For the first, we take as starting point a representation of b* [0] as p(O)/q(9)
where p, q are polynomials without common roots. Then (cf. Corollary 111.3.4)the Laplace transform of the ruin probability is
0*[e] _ /' e-eu^G(u)dU = 09(/3--a0p(-9)ap
/g(e)-PO(9)/q(9)) .
(6.5)
Thus, we have represented ti* [0] as ratio between polynomials (note that 0 mustnecessarily be a root of the numerator and cancels), and can use this to invertby the method of Proposition 6.1 to get i (u) = f3esus.
For the second algorithm, we use a representation (a, T, t) of b(x). We
recall (see Section 3; recall that t = -Te) that if B is phase-type and (a, T, t)
a phase-type representation with a the initial vector, T the phase generator
and t = -Te, then
5(u) = -a+e(T+t-+)uT-le where a+ = -/3aT-1. (6.6)
The remarkable fact is, that despite that the proof of (6.6) in Section 3 seemsto use the probabilistic interpretation of phase-type distribution in an essential
way, then:
Proposition 6.5 (6.6) holds true also in the matrix-exponential case.

6. MATRIX-EXPONENTIAL DISTRIBUTIONS 243
Proof Write
b* = a(9I - T)-1t, b+ = a+(9I - T)- 't, b+ = a+(BI - T)-1T-1t.
Then in Laplace transform formulation , the assertion is equivalent to
-a+(BI - T - to+)-1T-1t du =9(, - 6b* - b* (6.7)
cf. (6.5), (6.6). Presumably, this can be verified by analytic continuation fromthe phase-type domain to the matrix-exponential domain , but we shall give analgebraic proof. From the general matrix identity ([331] p. 519)
(A + UBV)- 1 = A-1 - A-1UB(B + BVA-1UB)-1BVA-1,
with A = 91-T, U =-t,B=land V=a+, we get
(91- T - to+)-1
= (BI - T)-1 + (6I - T)-1t ( l - a+(9I - T)-1t)-1a+(9I - T)-1
(91- T)-1 + 1 ib* (91- T)-1ta+(OI - T)-1
so that
b* b** b**-a+(9I - T - to+)-1T-1t = -b* - 1 +
b+ = b++ 1 .
Now, since
(91-T)-1T-1 = ^(T-1 + (91-T)-1),
(91- T)-1T-2 = IT-2 + 82T-1 + 82 (9I - T)-1
and
AB
we get
1 = J 00 b(x) dx = -aT-1t,0
xb(x) dx = aT2t,f
b+ = -0aT-1(9I -T)- 1t = -f3a (0I -T)-1T-1t

244 CHAPTER VIII. MATRIX-ANALYTIC METHODS
- 8 a(T-1 + (01- T)-1)t = 8 (1 - b*),
-/3aT-1(0I - T)-1T-1t = -/3a (9I - T)-1T-2t
-,3a (1T-2 + 1 T-1 + 1 (9I -T)-1) t0 02 02
-P + 7- 82b*.
From this it is straightforward to check that b**/(b+ - 1) is the same as ther.h.s. of (6.7). 0
Notes and references As noted in the references to section 4, some key earlyreferences using distributions with a rational transform for applied probability calcu-lations are Tacklind [373] (ruin probabilities) and Smith [350] (queueing theory). Akey tool is identifying poles and zeroes of transforms via Wiener-Hopf factorization.Much of the flavor of this classical approach and many examples are in Cohen [88].
For expositions on the general theory of matrix-exponential distributions, see As-mussen & Bladt [29], Lipsky [247] and Asmussen & O'Cinneide [41]; a key early paperis Cox [90] (from where the distribution in Example 6.3 is taken).
The proof of Proposition 6.5 is similar to arguments used in [29] for formulas in
renewal theory.
7 Reserve-dependent premiums
We consider the model of Chapter VII with Poisson arrivals at rate 0, premium
rate p(r) at level r of the reserve {Rt} and claim size distribution B which we
assume to be of phase-type with representation (E, a, T).
In Corollary VII.1.8, the ruin probability(u) was found in explicit form forthe case of B being exponential. (for some remarkable explicit formulas due toPaulsen & Gjessing [286], see the Notes to VII.1, but the argument of [286] doesnot apply in any reasonable generality). We present here first a computationalapproach for the general phase-type case (Section 7a) and next (Section 7b) aset of formulas covering the case of a two-step premium rule, cf. VII.la.
7a Computing O(u) via differential equations
The representation we use is essentially the same as the ones used in Sections 3and 4, to piece together the phases at downcrossing times of {Rt} (upcrossing
times of {St}) to a Markov process {mx} with state space E. See Fig. 7.1, which
is self-explanatory given Fig. 3.1.

7. RESERVE-DEPENDENT PREMIUMS
l0
Rt
-u
--------------------- 1z
I.
245
Figure 7.1
The difference from the case p(r) = p is that {m2}, though still Markov,is no longer time-homogeneous. Let P(tl,t2) be the matrix with ijth elementP (mt2 =j I mtl = i), O<- tl < t2 < u. Define further vi(u) as the probabilitythat the risk process starting from RD = u downcrosses level u for the first timein phase i. Note that in general >iEE Vi (U) < 1. In fact, >iEE Vi (U) is theruin probability for a risk process with initial reserve 0 and premium functionp(u + •). Also, in contrast to Section 3, the definition of {m8} depends on theinitial reserve u = Ro.
Since v(u) = (vi(u))iEE is the (defective) initial probability vector for {m8},we obtain
V)(u) = P(m„ E E) = v(u)P(0,u)e = A(u)e (7.1)
where A(t) = v(u)P(0, t) is the vector of state probabilities for mt, i.e. Ai(t) =P(mt = i). Given the v(t) have been computed, the A(t) and hence Vi(u) isavailable by solving differential equations:
Proposition 7.1 A(0) = v(u) and A'(t) = A(t)(T + tv(u - t)), 0 < t < u.
Proof The first statement is clear by definition. By general results on time-inhomogeneous Markov processes,
tq
P(tl, t2) = exp { f Q(v) dvlt1 1
where
Q(t) = ds [P(t, t + s) - I] I8-0

246 CHAPTER VIII. MATRIX-ANALYTIC METHODS
However, the interpretation of Q(t) as the intensity matrix of {my} at time t
shows that Q(t) is made up of two terms: obviously, {mx} has jumps of two
types, those corresponding to state changes in the underlying phase process andthose corresponding to the present jump of {Rt} being terminated at level u - t
and being followed by a downcrossing. The intensity of a jump from i to j is
tij for jumps of the first type and tivj(u - t) for the second. Hence Q(t) _
T + tv(u - t),
A'(t) = A(t)Q(t) = A(t)(T + tv(u - t)).
0Thus, from a computational point of view the remaining problem is to eval-
uate the v(t), 0 < t < u.
Proposition 7.2 For i E E,
-vi,(u)p (u) = ,(tai + vi(u)E
vj(u)tjp(u) - Q + vj (u)tjip (u). (7.4)
jEE jEE
Proof Consider the event A that there are no arrivals in the interval [0, dt],
the probability of which is 1 -,3dt. Given A', the probability that level u isdowncrossed for the first time in phase i is ai. Given A, the probability that
level u + p(u)dt is downcrossed for the first time in phase j is vj (u + p(u)dt).
Given this occurs, two things can happen: either the current jump continues
from u + p(u)dt to u, or it stops between level u + p(u)dt and u. In the first
case, the probability of downcrossing level u in phase i is
8ji(1 + p(u)dt • tii) + (1 - Sj i)p(u)dt • tji = Sji + p(u)tji dt,
whereas in the second case the probability is p(u)dt • tjvi(u). Thus, given A, the
probability of downcrossing level u in phase i for the first time is
E vj (u + p(u)dt) (Sji + p (u)dt • tji + p(u)dt • tjvi(u))
jEE
vi(u) + vi' (u)p(u)dt + p(u) dt E {tji + tjvi(u)}jEE
Collecting terms, we get
vi(u) = aidt + (1 -,Qdt) vi(u) + vi'(u)p(u)dt + p(u) dt E{tji+tjvi(u)}.
jEE

7. RESERVE-DEPENDENT PREMIUMS 247
Subtracting v; (u) on both side and dividing by dt yields the asserted differentialequation. q
When solving the differential equation in Proposition 7.2, we face the diffi-culty that no boundary conditions is immediately available. To deal with this,consider a modification of the original process {Rt} by linearizing the processwith some rate p, say, after a certain level v, say. Let p" (t), Rt , F" etc. refer tothe modified process. Then
pv(r) p(r) r < v
p r>v '
and (no matter how p is chosen) we have:
Lemma 7.3 For any fixed u > 0, vi (U) = lim v= (u).V - 00
Proof Let A be the event that the process downcrosses level u in phase i giventhat it starts at u and let B" be the event
By={o, <oo, supRt>vl t<7 I
where o, denotes the time of downcrossing level u . Then P(B,) is the tail ofa (defective) random variable so that P(Bv) -+ 0 as v -4 oo, and similarlyP"(Bv) -► 0.
Since the processes Rt and Rt coincide under level B,,, then P(A n Bv) _P"(A n BV'). Now since both P(A n Bv) -3 0 and P"(A n Bv) -- 0 as v -+ 00we have
P(A) -P"(A) = P(AnBv)+P(AnBv) -P"(AnB,,) -P"(AnBv)
= P(AnB,)-P"(AnB,)
-+ 0
as v -+ oo. q
From Section 3, we have
p(r) = p = vi (u) -0aTe;,P
which implies that v, (v) is given by the r.h.s. of (7.5). Thus, we can firstfor a given v solve (7.4) backwards for {va (t)}v>t>o, starting from v"(v) =
-,i7rT-1/p. This yields v, (u) for any values of u and v such that u < v.

248 CHAPTER VIII. MATRIX-ANALYTIC METHODS
Next consider a sequence of solutions obtained from a sequence of initial values{v; (u)},, where, say, v = u, 2u, 3u etc. Thus we obtain a convergent sequenceof solutions that converges to {vi(t)}u>t>o•
Notes and references The exposition is based upon Asmussen & Bladt [30] whichalso contains numerical illustrations.
The algorithm based upon numerical solution of a Volterra integral equation (Re-
mark VII.1.9, numerically implemented in Schock Petersen [288]) and the present
one based upon differential equations require both discretization along a discrete grid
0, 1/n, 2/n,.... However, typically the complexity in n is 0(n2) for integral equations
but 0(n) for integral equations. The precision depends on the particular quadrature
rule being employed. The trapezoidal rule used in [288] gives a precision of 0(n 3),
while the fourth-order Runge-Kutta method implemented in [30] gives 0(n-5).
7b Two-step premium rules
We now assume the premium function to be constant in two levels as in VII.1a,
p(r)P, r<v
r > v. (7.6)
We may think of process Rt as pieced together of two standard risk processesRI and Rte with constant premiums p1, p2, such that Rt coincide with RI under
level v and with Rt above level v. Let ii'( u) = a+'ie(T+ta+^)"e denote the
ruin probability for R't where a+ = a+i) = -laT-1/pi, cf. Corollary 3.1. Werecall from Propositon VII.1.10 that in addition to the O'(•), the evaluation ofVi(u) requires q(u) = 1 - zp1(u)/(1 - z51(v)), 0 < u < v, which is available sincethe z/i'(.) are so, as well p1(u), the probability of ruin between a and the nextupcrossing of v, where v = inf It > 0 : Rt < v}.
To evaluate p1(u), let v(u) = a+2ieiT+ta+>)(u-v), assuming u > v for themoment. Then v(u) is the initial distribution of the undershoot when down-crossing level v given that the process starts at u, i.e. for u > v the distributionof v - RQ (defined for or < oo only) is defective phase-type with representation(v(u), T). Recall that q(w) is the probability of upcrossing level v before ruingiven the process starts at w < v. Therefore
u vvueTa t 1- q(v dx + vueTva (7.7)pl( ) = ( ) ( q( )) ( )f
o (the integral is the contribution from {R, > 0} and the last term the contribu-
in (7.7) equalstion from {R, < 0}). The f iin
0f v(u)eT xt dx - v v(u)eTat 1
-01 (v - x) dx
1 - V" M

7. RESERVE-DEPENDENT PREMIUMS 249
V
11 - v(u)eTVe - 1
- ^1(v)1 - v(u ) eTV e - J v(u)eTxtz/)l (v - x) dx}
from which we see that
pl (u) = 1 + 1-1(v)
v(u)eTxt,01 (v - x) dx -
1
fV
The integral in (7.8) equals
1 -^(v) (1 - v(u)eTve).
(7.8)
v v(u)eTxta+2) e(T+ta +))(v-x)edx
which using Kronecker calculus (see A.4) can be written as
(Y(u)®a+)e(T+t°+>)°1
(T ® (-T - to+))1-1 {e{T®(-T-toy+))}„ - jl (t ®e)
Thus, all quantities involved in the computation of b(u) have been found in
matrix form.
Example 7.4 Let {Rt } be as in Example 3.2. I.e., B is hyperexponentialcorresponding to
3-3 0a-(2 2)' T= ( 0 7 t- (7
The arrival rate is (i = 3. Since µB = 5/21, p2 < 3.21 = ? yields 0(u) = 1, sowe consider the non-trivial case example p2 = 4 and p1 = 1.
From Example 3.2,
e-u + 1 e-6u
01(u)_ 24
3535 _ 35 - 24e- u - e-6u
4(u)35 - 24e-v - e-6v
Let Al = -3 + 2V'2- and A2 = -3 - 2V"2- be the eigenvalues of T + to( 2). Then
one gets
f 1ea1(u-v) + 1 3 ^ e A2(u- v) 1eai(u -v) + 1 e\2(u-v)3 7 7X20 31 ^') eA2 (u- v) + (2^ + 3v2 ea'(u "
20
21

250 CHAPTER VIII. MATRIX-ANALYTIC METHODS
From (7.7) we see that we can write pi (u) = v(u)V2 where V2 depends only
on v, and one gets
12e5" - 2
35e6v - 24e5v - 1V2 =
4e5"+6
35e6v - 24es" - 1
Thus, pi (u) = p12(u)/p1 l(u) where
p1i(u)
p12(u)
In particular,
35e6v - 24es" - 1,
7sv + ( 2v/2- + it(3 4'I 1 ea2(u-v ) e e1\2(u-")
+ ( 32+4,/-2-) ea1(u-v)esv + 4 _ 2,,/2- ea1(u-") .
7 21 3
192esv + 8
?,b(v) =
P1 - 21(35e6v - 24e5v - 1)'
192esv +835e6v + 168esv + 7*
Thus all terms involved in the formulae for the ruin probability have been ex-
plicitly derived. q
Notes and references The analysis and the example are from Asmussen & Bladt
[30].

Chapter IX
Ruin probabilities in thepresence of heavy tails
1 Subexponential distributions
We are concerned with distributions B with a heavy right tail B(x) = 1- B(x).
A rough distinction between light and heavy tails is that the m.g.f. B[s] =f e8x B(dx) is finite for some s > 0 in the light-tailed case and infinite for alls > 0 in the heavy-tailed case. For example, the exponential change of measuretechniques discussed in II.4, III.4-6 and at numerous later occasions require alight tail. Some main cases where this light-tail criterion are violated are(a) distributions with a regularly varying tail, B(x) = L(x)/x" where a > 0and L(x) is slowly varying, L(tx)/L(x) -4 1, x -4 oo, for all t > 0;(b) the lognormal distribution (the distribution of eu where U - N(µ, a2)) withdensity
1 e-(logy-Fh)2/2az .
x 2iror2
(c) the Weibull distribution with decreasing failure rate , B(x) = e-x0 with0<0<1.For further examples, see I.2b.
The definition b[s] = oo for all s > 0 of heavy tails is too general to allowfor a general non-trivial results on ruin probabilities, and instead we shall workwithin the class S of subexponential distributions . For the definition , we requirethat B is concentrated on (0, oo ) and say then that B is subexponential (B E S)if
251

252 CHAPTER IX. HEAVY TAILS
B*2\ 2,B(x)
Here B*2 is the convolution square, that is, the distribution of independent r.v.'s
X1, X2 with distribution B. In terms of r.v.'s, (1.1) then means P(X1 +X2 > x)
2P(Xi > x).To capture the intuition behind this definition, note first the following fact:
Proposition 1.1 Let B be any distribution on (0, oo). Then:
(a) P(max(Xi, X2) > x) ^' 2B(x), x -3 00.
) > 2.(b) liminfBB(()
Proof By the inclusion-exclusion formula, P(max(Xi, X2) > x) is
P(X1 > x) + P(X2 > x) - F(X1 > x, X2 > x) = 2B(x) - B(x)2 - 2B(x),
proving (a). Since B is concentrated on (0, oo), we have {max(Xi, X2) > x} C
{X1 + X2 > x}, and thus the lim inf in (b) is at least lim inf P(max(Xi, X2) >
x)/B(x) = 2. q
The proof shows that the condition for B E S is that the probability of the
set {X1 + X2 > x} is asymptotically the same as the probability of its subset
{max(Xi, X2) > x}. That is, in the subexponential case the only way X1 + X2
can get large is by one of the Xi becoming large. We later show:
Proposition 1.2 If B E S, then
P(X1>xI X1+X2>x)--* 2, P(Xi <yI Xi+X2>x) 1B(y).
That is, given X1 + X2 > x, the r.v. X1 is w.p. 1/2 'typical' (with distribution
B) and w.p. 1/2 it has the distribution of X1I X1 > x. In contrast, the behaviour
in the light-tailed case is illustrated in the following example:
Example 1.3 Consider the standard exponential distribution, B(x) a-x.
Then X1 +X2 has an Erlang(2) distribution with density ye-Y so that B*2(x)
xe-x. Thus the liminf in Proposition 1.1(b) is oo. As contrast to Proposition
1.2, one can check that
x x
where U is uniform on (0, 1). Thus , if X1 + X2 is large , then (with high proba-
bility) so are both of X1, X2 but none of them exceeds x. q

1. SUBEXPONENTIAL DISTRIBUTIONS 253
Here is the simplest example of subexponentiality:
Proposition 1.4 Any B with a regularly varying tail is subexponential.
Proof Assume B(x) = L(x)/xa with L slowly varying and a > 0. Let 0 < 5 <
1/2. If X1 + X2 > x, then either one of the Xi exceeds (1 - S)x, or they both
exceed Sx. Hence
B*2(x) 2B((1 - S)x + B(Sx)2lim sup < lim sup
a--+oo B(x) x-aoo B(x)
lim sup 2L((1- 6)x)/((1 - 5)x)' + 0 _ 2
x-^oo L(x)l xa (1-6)-
Letting S 10, we get limsupB*2(x)/B(x) < 2, and combining with Proposition
1.1(b) we get B*2(x)/B(x) -* 2. q
We now turn to the mathematical theory of subexponential distributions.
Proposition 1.5 If B E S, then B(B(x)y) -* 1 uniformly in y E [0, yo] as
X -+ 00.
[In terms of r.v.'s: if X - B E S, then the overshoot X - xIX > x converges in
distribution tooo. This follows since the probability of the overshoot to exceed
y is B (x + y)/B(x ) which has limit 1.]Proof Consider first a fixed y. Using the identity
B*(n+1)(x) = 1+B(x) - B*(n
+1)(x) 1+
Jo
2 1 - B*n(x - z) B(dz) (1.2)
B(x) B(x) B(x)
with n = 1 and splitting the integral into two corresponding to the intervals
[0, y] and (y, x], we get
BZ(x)) > 1 + B(y) + B(B(-)y) (B(x) - B(y)) .
If lim sup B(x - y)/B(x) > 1, we therefore get lim sup B*2(x)/B(x) > 1+B(y)+
1 - B(y) = 2, a contradiction. Finally lim inf B(x - y)/B(x) > 1 since y > 0.
The uniformity now follows from what has been shown for y = yo and the
obvious inequality
1 < B( Y) < B( 0), y E [0,yo].B(x) B(x)
0

254 CHAPTER IX. HEAVY TAILS
Corollary 1.6 If B E 8, then e"R(x) -* oo, b[c] = oo for all e > 0.
Proof For 0 < 5 < e, we have by Proposition 1.5 that B(n) > e-6B(n - 1) forall large n so that B(n) > cle-6n for all n. This implies B(x) > c2e-5x for allx, and this immediately yields the desired conclusions. 0
Proof of Proposition 1.2.
P(X1 > xIX1 + X2 > x)_ P(Xi > x) _ B(x) 1
P(X1 + X2 > x) B2(x) 2
1 yP(X1<y X1 + X2 > x) B(x - z) B(dz)
2B(x) ovr
2 200
using Proposition 1.5 and dominated convergence. O
The following result is extremely important and is often taken as definitionof the class S; its intuitive content is the same as discussed in the case n = 2above.
Proposition 1.7 If B E S, then for any n B*n(x)/B(x) -* n, x oo.
Proof We use induction. The case n = 2 is just the definition, so assumethe proposition has been shown for n. Given e > 0, choose y such thatIB*n(x)/B(x) - nI < e for x > y. Then by (1.2),
B*(n+1) (x) = 1 + (^
I x-y + Jxx y) W--(x - z )B(x - z) B(dz).
B(x) \Jo _ B(x - z) B(x)
Here the second integral can be bounded by
supB*n(y) B(x) - B(x - y)
v>o B(v) B(x)
which converges to 0 by Proposition 1.5 and the induction hypothesis. The firstintegral is
(n + O(e)) ^x y B(x - z) B(dz)JO B(x)
(n + 0(0)I
B (x) - B*2 (x) -
x B(x - z) B(dz)
LB(x) _y B(x) 111

1. SUBEXPONENTIAL DISTRIBUTIONS 255
Here the first term in {•} converges to 1 (by the definition of B E S) and the
second to 0 since it is bounded by (B(x) - B(x - y))/B(x). Combining these
estimates and letting a 4.0 completes the proof. 0
Lemma 1.8 If B E S, e > 0, then there exists a constant K = KE such that
B*n(x) < K(1 + e)nB(x) for all n and x.
Proof Define 5 > 0 by (1+5)2 = 1+e, choose T such that (B(x)-B*2(x))/B(x)
< 1 + b for x > T and let A = 1/B(T), an = supx>o B*n(x)/B(x). Then by
(1.2),
an+1
< 1 + supfX B*n(
x - z) B(dz) + supf
*n(x - z) B(x - z) B(dz)
x<T B (x) x>T 0 B(x - z) B(x)
< 1 + A + an sup f x B(x - z) B(dz) < 1 + A + an(1 + d) .x>T o B(x)
The truth of this for all n together with al = 1 implies an < K(1 + 5)2n where
K = (1 + A)/e. 0
Proposition 1.9 Let A1, A2 be distributions on (0, oo) such that Ai (x) _ aiB(x)
for some B E S and some constants al, a2 with a1 + a2 > 0. Then Al * A2 (x)
- (al + a2)B(x).
Proof Let X1, X2 be independent r.v.'s such that Xi has distribution Ai. Then
Al * A2(x) = P(X1 + X2 > x). For any fixed v, Proposition 1.5 easily yields
P(X1 + X2 > x, Xi < v) f= v Ai (x - y)Ai(dy)- o
- ajB(x)Ai(v) = ajB(x)(1+o„(1))
(j = 3 - i). Since
P(X1+X2 > x,X1 > x-v,X2 > x-v) < A1(x-v)A2(x -v) - ala2B(x)2
which can be neglected, it follows that it is necessary and sufficient for the
assertion to be true that
JX_VA(x - y)Ai(dy) = (x)o(1) (1.3)
Using the necessity part in the case Al = A2 = B yields
f x-vB(x - y)B(dy) = B(x)ov (1)• (1.4)
v

256
Now (1.3) follows if
CHAPTER LX. HEAVY TAILS
f"'V-V B(x - y)Ai(dy) = B(x)o„(1). (1.5)
By a change of variables, the l.h.s. of (1.5) becomes
xB(x - v)Ai(v) - Ai(x - v)B(v) + -_'U Aq(x - y)B(dy).
V
Here approximately the last term is B(x)o„(1) by (1.4), whereas the two firstyield B(x)(Ai(v) - aiB(v)) = B(x)o„(1). q
Corollary 1.10 The class S is closed under tail-equivalence. That is, if q(x) -aB(x) for some B E S and some constant a > 0, then A E S.
Proof Taking Al = A2 = A, a1 = a2 = a yields A*2(x) - 2aB(x) - 2A(x). q
Corollary 1.11 Let B E S and let A be any distribution with a ligther tail,A(x) = o(B(x)). Then A * B E S and A * B(x) - B(x)
Proof Take Al = A, A2 = B so that a1 = 0, a2 = 1. q
It is tempting to conjecture that S is closed under convolution. That is, itshould hold that B1 * B2 E S and B1 * B2 (x) - Bl (x) + B2 (x) when B1, B2 E S.However, B1 * B2 E S does not hold in full generality (but once B1 * B2 E Shas been shown, B1 * B2 (x) - Bl (x) + B2 (x) follows precisely as in the proofof Proposition 1.9). In the regularly varying case, it is easy to see that if L1, L2are slowly varying, then so is L = L1 + L2. Hence
Corollary 1.12 Assume that Bi(x) = Li(x)lxa, i = 1,2, with a > 0 andL1, L2 slowly varying. Then L = L1 + L2 is slowly varying and B1 * B2(x)sim L(x)/x«.
We next give a classical sufficient (and close to necessary) condition forsubexponentiality due to Pitman [290]. Recall that the failure rate A(x) of adistribution B with density b is A(x) = b(x)/B(x)
Proposition 1.13 Let B have density b and failure rate A(x) such that .(x) isdecreasing for x > x0 with limit 0 at oo. Then B E S provided
exA(x) b(x) dx < oo.fo "O

1. SUBEXPONENTIAL DISTRIBUTIONS 257
Proof We may assume that A(x) is everywhere decreasing (otherwise, replace B
by a tail equivalent distribution with a failure rate which is everywhere decreas-ing). Define A(x) = fo .(y) dy. Then B(x) = e-A(x). By (1.2),
B*2(x) - 1B(x)
fx
B(x - y ) b(y)dy = J eA(x)-A(x-v )-A(y)A(y) dyo _B (x) o
= ox/2 eA(x)-A(x-y)-A(y)\(y)dy + fox/2 eA(x
)-A(x-y)-A (y).(x - y) dy.
Jo 0
For y < x/2,A(x) - A(x - y) < yA(x - y) y\(y)•
The rightmost bound shows that the integrand in the first integral is bounded byey"(v)-A(y)a(y) = ev'(y ) b(y), an integrable function by assumption. The middlebound shows that it converges to b(y) for any fixed y since \ (x - y) -* 0. Thusby dominated convergence , the first integral has limit 1 . Since ) (x - y) < A (y)for y < x/2, we can use the same domination for the second integral but nowthe integrand has limit 0 . Thus B*2(x)/B(x) - 1 has limit 1 + 0, proving B E S.
Example 1.14 Consider the DFR Weibull case B(x) = e-x0 with 0 <,3 < 1.
Then b(x) = Ox0-le-xp, a(x) = ax0-1. Thus A(x) is everywhere decreasing,
and exa(x)b(x) = (3x0-1e-(1-0)x9 is integrable. Thus, the DFR Weibull distri-bution is subexponential. q
Example 1.15 In the lognormal distribution,
x - e-009x-v)2/2a2/(x 2irv2) logx
( ) 't (-(logx - U) /or) v2x
This yields easily that ex,`(x)b(x) is integrable. Further, elementary but tediouscalculations (which we omit) show that A(x) is ultimately decreasing. Thus, thelognormal distribution is subexponential. q
In the regularly varying case, subexponentiality has alrady been proved inCorollary 1.12. To illustrate how Proposition 1.13 works in this setting, we firstquote Karamata's theorem (Bingham, Goldie & Teugels [66]):
Proposition 1.16 For L(x) slowly varying and a > 1,
f ' L(y) dy ,,, L(x)y° (a - 1)xcl-1

258 CHAPTER IX. HEAVY TAILS
From this we get
Proposition 1.17 If B has a density of the form b(x) = aL(x)/x°+1 with L(x)slowly varying and a > 1, then B(x) - L(x)/x" and )t(x) - a/x.
Thus exa(x)b(x) - ea b(x) is integrable. However, the monotonicity condition inProposition 1.13 may present a problem in some cases so that the direct proofin Proposition 1.4 is necessary in full generality.
We conclude with a property of subexponential distributions which is oftenextremely important: under some mild smoothness assumptions, the overshootproperly normalized has a limit which is Pareto if B is regularly varying andexponential for distributions like the lognormal or Weibull. More precisely, letX W = X - xjX > x, 'y(x) = EXix>. Then:
Proposition 1.18 (a) If B has a density of the form b(x) = aL(x)/xa withL(x) slowly varying and a > 1, then 7(x) x/(a - 1) and
P(X (,)/-Y(x) > y) (1 + y/(a - 1))^ ' (1.6)
(b) Assume that for any yo
)t(x + y/A(x)) 1A(x)
uniformly for y E (0, yo] . Then 7(x) - 1/A(x) and
P(X ixil'Y (x) > y) -* e-';
(c) Under the assumptions of either (a) or (b), fO B(y) dy - y(x)B(x).
Proof (a): Using Karamata 's theorem, we get
EX(x) - E(X - x)+ _ 1 °°PX
P(X > x) P(X>x)J>y)dy
1 x L(y)/y-dy L(x)/((a1)x'-1)L
(x)l ° J°° ()l ax
a-1
Further
P ((a - 1)X(x)/x > y) = P(X > x[1 + y/(a - 1)] I X > x)
L(x[1 + y/(a - 1)]) xa
L(x) (x[1 + y/(a - 1)])a
11 .
(1 + y/(a - 1))a .

2. THE COMPOUND POISSON MODEL 259
We omit the proof of (c) and that EX (x) - 1/.(x). The remaining statement
(1.8) in (b) then follows from
P (A(x)X (x) > y)= F(X > x + y/.A(x) I X > x) = exp {A(x) - A(x + y/A(x))}
exP - f yl a(x) a(x + x) dx exp f Y A(x + u/A(x)) }= =
a(x) du0 0
= exp {-y (1 + 0(1))}
0
The property (1.7) is referred to as 1/A(x) being self-neglecting . It is trivially
verified to hold for the Weibull- and lognormal distributions , cf. Examples 1.14,
1.15.
Notes and references A good general reference for subexponential distributionis Embrechts, Kliippelberg & Mikosch [134].
2 The compound Poisson model
Consider the compound Poisson model with arrival intensity /3 and claim size
distribution B. Let St = Ei ` Ui - t be the claim surplus at time t and
M = sups>0 St, r(u) = inf it > 0; St > u}. We assume p = /3µB < 1 and are
interested in the ruin probability V)(u) = P(M > u) = P(r(u) < oo). Recallthat B0 denotes the stationary excess distribution, Bo(x) = f0 B(y) dy / µB.
Theorem 2 .1 If Bo E S, then Vi(u) P Bo(u).P
The proof is based upon the following lemma (stated slightly more generally
than needed at present).
Lemma 2.2 Let Y1, Y2, ... be i. i. d. with common distribution G E S and let K
be an independent integer-valued r.v. with EzK < oo for some z > 1. Then
P(Y1 + • • • + YK > u) - EK G(u).
Proof Recall from Section 1 that G*n (u) nG(u), u -a oo, and that for eachz > 1 there is a D < oo such that G*n(u) < G(u)Dzn for all u. We get
p(yl+...+YK>u) = ^•P(K = n)G* n(u) -- L1•P(K= n)•n = EK,G(u) - nn-.0 G(u) n-0

260 CHAPTER IX. HEAVY TAILS
using dominated convergence with >2 P(K = n) Dz" as majorant. q
Proof of Theorem 2.1. The Pollaczeck-Khinchine formula states that (in the
set-up of Lemma 2.2) M = Yl + • • • +YK where the Yt have distribution Bo andK is geometric with parameter p, P(K = k) = (1- p)p'. Since EK = p/(1- p)
and EzK < oo whenever pz < 1, the result follows immediately from Lemma2.2. q
The condition Bo E S is for all practical purposes equivalent to B E S. How-ever, mathematically one must note that there exist (quite intricate) exampleswhere B E S, Bo ¢ S, as well as examples where B ¢ S, Bo E S. The tail of Bois easily expressed in terms of the tail of B and the function y(x) in Proposition1.18, _
Bo(x) µ8 I aoB(y)dy =
B(x^sx(^) - ?(xµ 8
(x). (2.1)
In particular , in our three main examples (regular variation , lognormal , Weibull)one has
B(x) - x^ )( Bo(x) - µB(01 - 1)xa-1'( lox - µ +°2 /2
vxe-(109x-11)2/202J
B(x) _ f or µB = eµ Bo(x ) eµ+O2/2(log x)2 27r'
1B(x) = e-x'
= µB = F(1/0 ) Bo(x) ,., r(1/Q)
xl-Qe-xp
From this , Bo E S is immediate in the regularly varying case, and for the lognor-mal and Weibull cases it can be verified using Pitman 's criterion (Proposition1.13).
Note that in these examples , Bo is more heavy-tailed than B . In general:
Proposition 2.3 If B E S, then Bo(x)/B(x) -+ 00, x -4 00.
Proof Since B(x + y)/B(x) -* 1 uniformly in y E [0, a], we have
x+a
lim infB0 (x)
> lim inffx B(y)dy = a
x-+oo B(x) - x-400 PBB(x) PB
Leta-+oo. q
Notes and references Theorem 2.1 is essentially due to von Bahr [56], Borovkov
[73] and Pakes [280]. See also Embrechts & Veraverbeeke [136].The approximation in Theorem 2.1 is notoriously not very accurate. The problem
is a very slow rate of convergence as u -► oo. For some numerical studies, see Abate,

3. THE RENEWAL MODEL 261
Choudhury & Whitt [1]. Kalashnikov [219] and Asmussen & Binswanger [27]. E.g., in[219] p. 195 there are numerical examples where tp(u) is of order 10-5 but Theorem 2.1gives 10-10. This shows that even the approximation is asymptotically correct in thetail, one may have to go out to values of 1/'(u) which are unrealistically small before
the fit is reasonable. In [1], also a second order term is introduced but unfortunately itdoes not present a great improvement. Somewhat related work is in Omey & Willekens[278], [279]. Based upon ideas of Hogan [200], Asmussen & Binswanger [27] suggestedan approximation which is substantially better than Theorem 2.1 when u is small or
moderately large.
3 The renewal model
We consider the renewal model with claim size distribution B and interarrivaldistribution A as in Chapter V. Let U= be the ith claim , T1 the ith interarrivaltime and Xi = U; - Ti,
Snd) = Xl +... + Xn, M = sup s$ , t9(u) = inf {n : Snd> > u} .{n=0,1,...}
Then ik(u) = F (M > u) = P(i9 (u) < oo). We assume positive safety loading,i.e. p = iB /µA < 1. The main result is:
Theorem 3 . 1 Assume that (a) the stationary excess distribution Bo of B issubexponential and that (b) B itself satisfies B(x - y)/B (x) -> 1 uniformly oncompact y-internals. Then
l/i(u) 1 P Bo(u) u -+ 00. (3.1)P
[Note that (b) in particular holds if B E S.]The proof is based upon the observation that also in the renewal setting,
there is a representation of M similar to the Pollaczeck-Khinchine formula. To
this end , let t9+ = i9(0) be the first ascending ladder epoch of {Snd> },
G+ (A) = P(Sq+ E A,,9+ < oo) = P(S,+ E A, T+ < oo)
where r+ = T1 + • • • + T,y + as usual denotes the first ascending ladder epoch
of the continuous time claim surplus process {St}. Thus G+ is the ascendingladder height distribution (which is defective because of PB < PA). Define
further 0 = IIG+II = P(r9+ < oo). Then
K
M=EY,i=1

262 CHAPTER IX. HEAVY TAILS
where K is geometric with parameter 9, P(K = k) = (1 - 9)9'' and Y1,Y2,...
are independent of K and i.i.d. with distribution G+/9 (the distribution of S,y+given r+ < oo). As for the compound Poisson model, this representation willbe our basic vehicle to derive tail asymptotics of M but we face the addeddifficulties that neither the constant 9 nor the distribution of the Yi are explicit.
Let F denote the distribution of the Xi and F1 the integrated tail, FI (x) _fz ° F(y) dy, x > 0.
Lemma 3 .2 F(x) - B(x), x -* oo, and hence FI(x) - PBBo(x).
Proof By dominated convergence and (b),
B(x) _ JO°B(B(x)y) A(dy) f 1 . A(dy) = 1.
0The lemma implies that (3.1) is equivalent to
P(M > u) " -- FI(u), u -a 00, (3.3)
and we will prove it in this form (in the next Section, we will use the fact thatthe proof of (3.1) holds for a general random walk satisfying the analogues of(a), (b) and does not rely on the structure Xi = Ui - Ti).
Write G+(x) = G+ (x, oo) = F(S,g+ > x, d+ < oo). Let further 19_ _
inf {n > 0: S^d^ < 0} be the first descending ladder epoch, G_(A) = P(S,y_ E
A) the descending ladder height distribution (IIG -II = 1 because of PB < PA)and let PG_ be the mean of G_.
Lemma 3 .3 G+ (x) - FI(x) /IPG_I, x -+ oo.
Proof Let R+(A) = E E'+ -' I(S,(,d)) E A) denote the pre-19+ occupation mea-sure and let and U_ = Eo G'_" be the renewal measure corresponding to G_.Then
0 0G+ (x) = J F(x - y) R+(dy) _ j (x_y)U_(dY)
00 00
(the first identity is obvious and the second follows since an easy time reversionargument shows that R+ = U_, cf. A.2). The heuristics is now that becauseof (b), the contribution from the interval (-N, 0] to the integral is O(F(x))
= o(FI(x)), whereas for large y , U_ (dy) is close to Lebesgue measure on (- oo, 0]normalized by IPG_ I so that we should have
G+(x) - 1to
F(x - y) dy = 1 Pi (X)IPG_ I / oo IPG_ I

3. THE RENEWAL MODEL 263
We now make this precise. If G_ is non-lattice, then by Blackwell 's renewaltheorem U_ (-n - 1, -n] -+ 1/I µG_ I. In the lattice case, we can assume thatthe span is 1 and then the same conclusion holds since then U-(-n - 1, -n] isjust the probability of a renewal at n.
Given e, choose N such that F(n - 1)/F(n) < 1 + e for n > N (this is
possible by (b) and Lemma 3.2), and that U_(-n - 1, -n] < (1 + e)/1µc_ I for
n > N. We then get
lim sup G+(x)x-ro0 Fj(x)
< lim supo F(x - y) U- (dy)
+ lim sup N F(x - y) U_ (dy)
X---)00 fN FI (x) Z-Y00 00 FI (x)
< lim sup F(x) U-(-N, 0]x-+00 FI(x)
00
+ lim up 1x) E F(x + n) U_ (-n - 1, -n]F1 ( n=N
0 + limsup_1 1+e
E F(x+n)x-r00 FI(x) FAG- I n=N
E)2 r00(1+ e) lim sup - 1 J F(x + y) dy
I ,UG_ I x-,oo Fj(x) N(1 +6)2 FI(x + N) _ (1 + e)z
lim supI {IC_ I X-400 Pi
(x) IµG_ I
Here in the third step we used that (b) implies B(x)/Bo(x) -+ 0 and hence
F(x)/FI(x) -4 0, and in the last that FI is asymptotically proportional to
Bo E S. Similarly,z
lim inf G+(x) > (1 - e)
- FI (x) IpG_ I
Letting a 10, the proof is complete. q
Proof of Theorem 3.1. By Lemma 3.3, F(Y= > x) FI(x)/(OIp _ 1). Henceusing dominated convergence precisely as for the compound Poisson model, (3.2)yields
00F F
P(M > u) _ E(1 - 0)0k k I(u) - I (u)
A;=1 BIpG_ I (1- 9)IpG_ I
Differentiating the Wiener-Hopf factorization identity (A.9)
1 - F[s] = (1 - O-[s])(1 - G+[s])

264 CHAPTER IX. HEAVY TAILS
and letting s = 0 yields
-µF = -(1 - 1)6+[0] - (1 - IIG+II)µc_ = -(1 - 0)ua_ .
Therefore by Lemma 3.2,
FJ(u) UBBO(U) PBo(u)N =
(1-0)Ipc_I JUA - AB i-P
We conclude by a lemma needed in the next section:
Lemma 3 .4 For any a < oo, P(M > u, S+9(u) - Se(u)_1 < a) = o(Fj(u)).
Proof Let w(u) = inf {n : Sid) E (u - a, u), Mn < u}. Then
P(M E (u - a, u)) > P(w(u) < oo)(i -lp (0))•
On the other hand, on the set {M > u, Sty(u) - Sty(u)_I < a} we have w(u) < oo,
and {Su,(u)+n - SS(u)}n=o,l,... must attain a maximum > 0 so that
P(M > u, S+q(u) - So( u)_1 < a) < P (w(u) < oo)j/i(0)
< 0(0) P(M E (u - a, u)).1-0(0)
But since P(M > u - a) N P(M > u), we have
P(M E (u - a,u)) = o(P (M > u)) = o(FI(u)).
Notes and references Theorem 3.1 is due to Embrechts & Veraverbeke [136],with roots in von Bahr [56] and Pakes [280].
Note that substantially sharper statements than Lemma 3.4 on the joint distribu-tion of (S,yiui_1,So(u)) are available, see Asmussen & Kliippelberg [36].
4 Models with dependent input
We now generalize one step further and consider risk processes with dependentinterclaim times, allowing also for possible dependence between the arrival pro-cess and the claim sizes. In view of the `one large claim' heuristics it seems rea-sonable to expect that similar results as for the compound Poisson and renewalmodels should hold in great generality even when allowing for such dependence.

4. MODELS WITH DEPENDENT INPUT 265
Various criteria for this to be true were recently given by Asmussen, Schmidli& Schmidt [47]. We give here one of them, Theorem 4.1 based upon a regener-ative assumption, and apply it to the Markov-modulated model of Chapter VI.For further approaches, examples and counterexamples, see [47].
Assume that the claim surplus process {St}t>o has a regenerative structurein the sense that there exists a renewal process Xo = 0 < Xl <- X2 < ... suchthat
{SXo+t - SXo}0<t< X1-Xo , {SX1+t - Sxi}0<t<x2-Xl , ..
(viewed as random elements of the space of D-functions with finite lifelengths)are i.i.d. and the distribution of {Sxk+t - Sxk}o<t<xk+1-xk is the same for all
k = 1, 2,.... The zero-delayed case corresponds to Xo = Xl = 0 and we writethen F0, E0, 0o(u) etc. We let F* denote the Po-distribution of Si, assume
pp. < 0 and EoX < oo where X = X2 - X1 is the generic cycle. See Fig. 4.1where the filled circles symbolize a regeneration in the path.
Figure 4.1
Note that no specific sample path structure of {St} (like in Fig. 4.1) isassumed. We return to this point in Example 4.4 below.
Define
S. = Sx, +1, M,1 = max S, M* = max S;,, M = sup St.k=0,...,n n=0,1,... t>0
The idea is now to observe that in the zero-delayed case, {Sn}n=o,1,... (corre-sponding to the filled circles on Fig. 4.1 except for the first one) is a randomwalk. Thus the assumption
,F*(X) = P0(Si > x) ,., G(x) (4.1)

266 CHAPTER IX. HEAVY TAILS
for some G such that both G E S and Go E S makes (3.3) applicable so that
F(M* > u) 141 F*(u), u -p 00. (4.2)
Imposing suitable conditions on the behaviour of {St} within a cycle will then
ensure that M and M* are sufficiently close to be tail equivalent. The one we
focus on isFo (Mix) > x) ,,, Fo(Si > X), (4.3)
where
Mnx) = sup Sxn +t - Sxn =o<t<xn +1 -X.
sup Sxn+t - S.* -io<t<xn+1-x.
Since clearly M(x) > Sl , the assumption means that Mix) and Sl are not too
far away. See Fig. 4.2.
---------------
N NXi=0
NFigure 4.2
Theorem 4.1 Assume that (4.1) and (4.3) hold. Then
'00 (u) = Fo(M > u) ,,, jF11 F* (U).
Proof Since M > M*, it suffices by (4.2) to show
liminfF(M* > u) > 1. (4.4)
u->oo F(M > u)

4. MODELS WITH DEPENDENT INPUT 267
Define
79* (u) = inf {n = 1 , 2, ...: Sn > u} ,
/3(u) = inf{n=1,2,...: S;,+Mn+1>u}
(note that {M> u} = {3(u) < oo}). Let a > 0 be fixed. We shall use theestimate
Po(M > u) Miu^+1 < a) = o(Po(M > u)) (4.5)
which follows since
Po (M > u, MWO(u)+1 < a)
IN ( U A1; E (u - a, u)}n=1
< P(M* E (u - a, u))/P(M* = 0) = o(Po(M* > u)).
Given e > 0, choose a such that Po(Si > x) > (1 - e)Po (MMX> > x), x > a.Then by Lemma 3.4,
Po(M* > u) - Po (M* > u, S;(u) - S;(u)-1 > a)00
1: Po(Mn<u,Sn+1-Sn>aV(u-Sn*))n=1
00
> (1-E)EPo(Mn<u,Mn+1 >aV(u -S;, ))n=1
00
max St u, Mn+l > a V (u - Sn-
> (1 - E) Po (0<t<x„+j
n
( 1 - e)Po (M > u, M^xu)+l > a) - (1 - e)Po (M > U).
Letting first u -+ oo and next e . 0 yields (4.4). q
Under suitable conditions , Theorem 4.1 can be rewritten as
00 (U)1 p pBo(u)
(4.6)
where B is the Palm distribution of claims and p - 1 = limti00 St/t. To thisend, assume the path structure
Nt
St = EUi-t+Zti=1

268 CHAPTER IX. HEAVY TAILS
with {Zt} continuous, independent of {>N` U;} and satisfying Zt/ta4'
0. Then
the Palm distribution of claims isN,
B(x) = E N Eo I(U1 < x) . (4.8)0 x i=1
Write ,Q = EoNx/EoX.
Corollary 4.2 Assume that {St} is regenerative and satisfies (4.7). Assumefurther that(i) both B and Bo are subexponential;
(ii) EozNX < oo for some z > 1;(iii) For some o -field Y, X and N. are F-measurable and
NX
Po J:U=>xi=1
sup Zt > x o(B(x))/
(iv) Po(0:5t<x
Then (4.6) holds with p = ,3PB.
Proof It is easily seen that the r.v.'s FNX U; and ENX Ui - X both have tails of
order EoNx • B(x), cf. the proof of Lemma 4.6 below. The same is true for Sl,
since the tail of Zx is lighter than B(x) by (iv), and also for Mix) since
Nx
Mix) < > UE + sup Zt.i=1 o<t<x
Thus Theorem 4.1 is in force, and the rest is just rewriting of constants: since
p = 1+tlim St = 1+ .oX
(see Proposition A1.4), we get
00 (u) 1 J Po(Sl > x) dxIPF- I u
1 EoNxB(x) dxEoX(1 - p) Ju
P Bo(u)1-p
0

4. MODELS WITH DEPENDENT INPUT 269
Example 4 .3 As a first quick application, consider the periodic model of VI.6with arrival rate /3(t) at time t (periodic with period 1) and claims with distri-bution B (independent of the time at which they arrive). Assume that B E S,Bo E S, i.e. (i) holds. The regenerative assumption is satisfied if we takeXo = Xi = 0, X2 = 1, X3 = 2,.. ., Zt - 0 (thus (iv) is trivial). The number
N. of claims arriving in [0, 1) is Poisson with rate /3 = fo /3(s) ds so that (ii)
holds, and taking F = o,(NX), (iii) is obvious. Thus we conclude that (4.6)holds. q
Example 4 .4 Assume that St = Zt - t + EN'I Ui where {>N`1 Ui - t} is
standard compound Poisson and {Zt} an independent Brownian motion withmean zero and variance constant a2. Again , we assume that B E S, Bo E S;
then (iv) holds since the distribution of supo<t<i Z(t) is the same as that ofI Zl 1, in particular light-tailed. Taking again Xo = Xi = 0, X2 = 1, X3 = 2,. . .,we conclude just as in Example 4.3 that (4.6) holds. In particular, note that the
asymptotics of i/io(u) is the same irrespective of whether the Brownian term Zt
in St -is present or not. q
We now return to the Markov-modulated risk model of Chapter VI withbackground Markov process {Jt} with p < oo states and stationary distribution7r. The arrival rate is /3i and the claim size distribution Bi when Jt = i. Weconsider the case where one or more of the claim size distributions Bi are heavy-tailed. More precisely, we will assume that
B2(x)lim
G(x)= ci
x-+oo
for some distribution G such that both G and the integrated tail fx°O G(y) dy
are subexponential , and for some constants ci < oo such that cl + • • • + c, > 0.The average arrival rate /3 and the Palm distribution B of the claim sizes aregiven by
P P
Q = iri/i, B = >2 7riaiBii=1 i=1
and we assume p = 01-4B = Ep ri/3ipB; < 1.
Theorem 4.5 Consider the Markov-modulated risk model with claim size dis-
tributions satisfying (4.9). Then (4.6) holds.
The key step of the proof is the following lemma.

270 CHAPTER IX. HEAVY TAILS
Lemma 4 .6 Let (N1, ... , NP ) be a random vector in {0, 1, 2 , ...}P, X > 0 ar.v. and F a a-algebra such that (N1, ... , NP) and X are .F-measurable. Let{Fi}t=1 P be a family of distributions on [0, oo) and define
Yx =
p Ni
EEX'i - Xi=1 j=1
where conditionally upon F the Xi, are independent with distribution Fi forXij. Assume EzN-1+"'+Np < oo for some z > 1 and all i, and that for somedistribution G on [0, oo) such that G E S and some c1, ... , cp with cl + + cp
> 0 it holds that Fi(x) - ciG(x). Then
P
P(Yx > x) - c'(x) where c = ciENi .
i=1
Proof Consider first the case X = 0. It follows by a slight extension of resultsfrom Section 1 that
P
P(Yo > x I Y) G(x) ciNi, P(Yo > x I ^ ) < CG(x)zN1+ +Np
i=1
for some C = C(z) < oo. Thus dominated convergence yields
P(Yo>x P(Yo>x .^•)
=
(
G(x) E \ G(x)
In the general case, as x -a oo,
P
-► E ciNi = C.
i-1
P P
P(YX > x I.F) = P(Yo > X+x I •^) G (x +x)>2ciNi - G(x) > ciNi ,i=1 i=1
andP(Yx > x ^) < P(Y0 > x I.F) < CG(x)zn'1+,"+Np .
The same dominated convergence argument completes the proof. q
Proof of Theorem 4.5. If Jo = i, we can define the regenerations points as thetimes of returns to i, and the rest of the argument is then just as the proof ofCorollary 4.2. An easy conditioning argument then yields the result when Jo israndom. q
For light-tailed distributions, Markov-modulation typically decreases theadjustment coefficient -y and thereby changes the order of magnitude of the ruin

5. FINITE-HORIZON RUIN PROBABILITIES 271
probabilities for large u, cf. VI.4. It follows from Theorem 4.5 that the effect ofMarkov-modulation is in some sense less dramatical for heavy-tailed distribu-tions: the order of magnitude of the ruin probabilities remains ft°° B(x) dx.
Within the class of risk processes in a Markovian environment, Theorem 4.5
shows that basically only the tail dominant claim size distributions (those with
c, > 0) matter for determining the order of magnitude of the ruin probabilities
in the heavy-tailed case. In contrast, for light-tailed distributions the value of
the adjustment coefficient -y is given by a delicate interaction between all B.
Notes and references Theorem 4. 5 was first proved by Asmussen, Floe Henriksen
& Kliippelberg [31] by a lengthy argument which did not provide the constant in front
of Bo(u) in final form. An improvement was given in Asmussen & Hojgaard [33], and
the final reduction by Jelenkovic & Lazar [213]. The present approach via Theorem 4.1
is from Asmussen, Schmidli & Schmidt [47]. That paper also contains further criteria
for regenerative input (in particular also a treatment of the delayed case which we
have omitted here), as well as a condition for (4.6) to hold in a situation where the
inter-claim times (T1,T2.... ) form a general stationary sequence and the U; i.i.d. and
independent of (T1,T2.... ); this is applied for example to risk processes with Poisson
cluster arrivals. For further studies of perturbations like in Corollary 4.2 and Example
4.4, see Schlegel [316].
5 Finite-horizon ruin probabilities
We consider the compound Poisson model with p = /3pB < 1 and the station-
ary excess distribution Bo subexponential. Then O(u) - pl(1 - p)Bo(u), cf.
Theorem 2.1. As usual, r(u) is the time of ruin and as in IV.7, we let PN"N =
P(. I T(u) < oo). The main result of this section, Theorem 5.4, states that
under mild additional conditions, there exist constants -Y(u) such that the F(u)-
distribution of r(u)/y(u) has a limit which is either Pareto (when B is regularly
varying) or exponential (for B's such as the lognormal or DFR Weibull); thisshould be compared with the normal limit for the light-tailed case, cf. IV.4.Combined with the approximation for O(u), this then easily yields approxima-
tions for the finite horizon ruin probabilities (Corollary 5.7).We start by reviewing some general facts which are fundamental for the
analysis. Essentially, the discussion provides an alternative point of view tosome results in Chapter IV, in particular Proposition 2.3.
5a Excursion theory for Markov processes
Let until further notice {St} be an arbitrary Markov process with state space E
(we write Px when So = x) and m a stationary measure, i.e. m is a (or-finite)

272 CHAPTER IX. HEAVY TAILS
measure on E such that
Lfor all measurable A C E and all t > 0. Then there is a Markov process {Rt}on E such that
fE m(dx)h(x)Exk(Rt) = Lm(dy)k(y)Eyh(St) (5.2)
for all bounded measurable functions h, k on E; in the terminology of generalMarkov process theory, {St} and {Rt} are in classical duality w. r. t. m.
The simplest example is a discrete time discrete state space chain, where wecan take h, k as indicator functions, for states i, j, say, and (5.2) with t = 1means m;rij = mjsji where r13,s=j are the transition probabilities for {St},resp. {Rt}. Thus, a familiar case is time reversion (here m is the stationarydistribution); but the example of relevance for us is the following:
Proposition 5.1 A compound Poisson risk process {Rt} and its associatedclaim surplus process {St} are in classical duality w .r.t. Lebesgue measure.
Proof Starting from Ro = x, Rt is distributed as x + t - >N` Ui, and starting
from So = y, St is distributed as y - t + EI U; (note that we allow x, y to varyin, the whole of R and not as usual impose the restrictions x > 0, y = 0). Let
G denote the distribution of ENt U, - t. Then (5.2) means
ffh(a,)k(x - z) dx G(dz) = ffh(y + z) k(y)dy G(dz).
The equality of the l.h.s. to the r.h.s. follows by the substitution y = x - z. q
For F C E, an excursion in F starting from x E F is the (typically finite)piece of sample path'
{St}o<t<w(F°) I So = x where w(Fc) = inf It > 0: St 0 F} .
We let QS be the corresponding distribution and
Qx,y = Qx (. Sw(F.)- = y, w(Fc) < oo )
'In general Markov process theory, a main difficulty is to make sense to such excursionsalso when Px(w(F°) = 0) = 1. Say {St} is reflected Brownian motion on [0,00), x = 0+and F = (0, oo). For the present purposes it suffices , however , to consider only the casePx(w(F`) = 0) 0.

5. FINITE-HORIZON RUIN PROBABILITIES 273
y E F (in discrete time, Sw(Fo)_ should be interpreted as Sw(F^)_1). Thus, Qx y
is the distribution of an excursion of {St} conditioned to start in x E F and
terminate in y E F. QR and QRy are defined similarly, and we let Qy y refer to
the time reversed excursion . That is,
Qx,y(-) = P ({SW(F`)-t-} 0<t<w(F°) E So = x,SS(F.)- = y)
Theorem 5 .2 Qy,y = QyQ.
The theorem is illustrated in Fig . 5.1 for the case F = (-oo, 0], x = 0.
w(0, oo) = r(0)
x=
y
St
(a)
Figure 5.1
The sample path in (a) is the excursion of {St} conditioned to start in x = 0 andto end in y > 0, the one in (b) is the time reversed path. The theorem states thatthe path in (b) has the same distribution as an excursion of {Rt} conditioned tostart in y < 0 and to end in x = 0. But in the risk theory example (correspondingto which the sample paths are drawn), this simply means the distribution of thepath of {Rt} starting from y and stopped when 0 is hit. In particular:
Corollary 5.3 The distribution of r(0) given r(0) < oo, S,(0)_ = y < 0 is thesame as the distribution of w(-y) where w(z) = inf It > 0 : Rt = z}, z > 0.
[note that w(z) < oo a.s. when p = ,13AB < 1]Proof of Theorem 5.2. We consider the discrete time discrete state space caseonly (well-behaved cases such as the risk process example can then easily behandled by discrete approximations). We can then view Qy,y as a measure onall strings of the form i0i1 ... in with i0, i1, ... , in E F, io = x, in = y,
/^s x (S1 = Z1, ... , Sn = in = y; Sn+1 E Fc)nx,y(2p21 ...itt) = P Px(w(Fc)
< 00, Sw(F)-1 = y)

274 CHAPTER IX. HEAVY TAILS
note that
Fx(w(Fc) < 00, S, (Fc)-1 = y)00E E Px (Si = 21i ... , S. = in = y; Sn+1 E Fc)
n=1 i1,...,i„_iEF
Similarly, t' y and Qyx are measures on all strings of the form ipi l ... in with20,ii ,...,in E F, i0 = y, in = x,
R Pt' (R1 = ii, ... , Rn = in = x; Rn+1 E F`)Qy x(2p21 ...
in) -F (w(Fc) < 00, R ,(F<)-1 = Y)
S Sand Qx y(ipil ... in) = Qx,J (i.in-1 ... 2p).
To show Q (i iyx 0 1 ... 2n)= Qx,TI(
2n2n _1 ... 2p) when 20, 21 , ... , in E F, 20 = y,in = x, note first that
Pt' (Rl = il, ... , Rn = in = x; Rn+1 E FC)
TioilTili2...rin_1inE Txj
jEFC
m21 s2120 m2252221 m in Ssn n-1
m2p mil min-1 jEF`
1 Sinin _ 1 ... Si l io E mjSjx.
MY jEF^
Thus
mjSjx
Mx
Qx(ioii ... in) = ooSxin-1 ... Silt'
E Sxik_1 ... .gilt'
k=1 ii .....ik-1EF
Similarly but easier
QSx,y(inin_1 ... i0) 00
Sxin_1 ... Si11 E SYj
jEF`
Sxik _1 ... Silt' E SO
k=1 i1, ...,ik_1EF jEF°
Sxin_1 ... Si1y
00
E E 5xik_ 1 ... Si1y
k=1 i1 ,...,ik_1EF

5. FINITE-HORIZON RUIN PROBABILITIES 275
5b The time to ruin
Our approach to the study of the asymptotic distribution of the ruin time is todecompose the path of {St} in ladder segments . To clarify the ideas we firstconsider the case where ruin occurs already in the first ladder segment , that is,the case r (O) < oo, ST(o) > y.
Let Y = Yl = Sr+( 1) be the value of the claim surplus process just after thefirst ladder epoch , Z = Zl = ST+( 1)_ the value just before the first ladder epoch
(these r.v.'s are defined w.p. 1 w .r.t. P(o) ), see Fig. 5.2.
U
T(O) = T(u) Y
Figure 5.2
The distribution of (Y, Z) is described in Theorem 111.2.2. The formulation rel-evant for the present purposes states that Y has distribution Bo and that condi-
tionally upon Y = y, Z follows the excess distribution B(Y) given by B(Y) (x) _B(y + x)/B(y).
We are interested in the conditional distribution of T(u) = T(0) given
{T(0) < oo, S,(o) > y} = {T(0) < oo, Y > y} ,
that is, the distribution w.r.t. P(") = P(. 7-(0) < oo, Y > u). Now the P(u,')-
distribution of Y-u is Bo"). That is, the P(u,')-density of Y is B(y)/[,UBBo(u)],
y > u. Bo") is also the P(u,')-distribution of Z since
°° B(y) B(y + a) dyP(Z>aIY>u) = 1 FLBBo(u) B (y)
J°° (z) dy - B(a)+a PBBo(u)

276 CHAPTER IX. HEAVY TAILS
Let {w(z)}Z^,o be defined by w(z) = inf It > 0: Rt = z} where {Rt} is is in-dependent of {St}, in particular of Z. Then Corollary 5.3 implies that the
P("'1)-distribution of T(u) = r(0) is that of w(Z). Now Bo E S implies that
the Bo ")(a) -+ 0 for any fixed a, i.e. P(Z < a I Y > u) -3 0. Since w(z)/z
a$. 1/(1 - p), z -^ oo, it therefore follows that T(u)/Z converges in Pi"'')-
probability to 1/(1 - p).
Since the conditional distribution of Z is known (viz. Bo") ), this in principledetermines the asymptotic behaviour of r(u). However, a slight rewriting maybe more appealing. Recall the definition of the auxiliary function y(x) in Section1. It is straightforward that under the conditions of Proposition 1.18(c)
Bo")(yY (u)) -+ P(W > y) (5.3)
where the distribution of W is Pareto with mean one in case (a) and exponential
with mean one in case (b). That is , Z/'y(u) -* W in Pi"' ')-distribution . r(u)/Z
-4 1/(1 - p) then yields the final result T(u)/y(u) -+ W/(1 - p) in Pi"'')-distribution.
We now turn to the general case and will see that this conclusion also is truein P(")-distribution:
Theorem 5 .4 Assume that Bo E S and that (5.3) holds. Then 7-(u)/-y(u) --►W/(1 - p) in F(u) -distribution.
In the proof, let r+(1) = T(0),T+(2),... denote the ladder epochs and let
Yk, Zk be defined similarly as Y = Y1, Z = ZI but relative to the kth laddersegment, cf. Fig. 5.3. Then, conditionally upon r+ (n) < oo, the random vectors(YI, Z1),. .. , (Y,,, Zn), are i.i.d. and distributed as (Y, Z).
We let K(u) = inf In = 1, 2, ...: r+ (n) < oo, Y1 + • • • + Yn > u} denote the
number of ladder steps leading to ruin and P("'n) = P(• I r(u) < oo, K(u) = n).
The idea is now to observe that if K(u) = n, then by the subexponential propertyYn must be large, i.e. > u with high probability, and YI,... , Yn_1 'typical'.Hence Z,, must be large and Z1,.. . , Zn_1 'typical' which implies that the firstn-1 ladder segment must be short and the last long; more precisely, the durationT+ (n) - r+ (n - 1) of the last ladder segment can be estimated by the same
approach as we used above when n = 1, and since its dominates the first n - 1,
we get the same asymptotics as when n = 1.

5. FINITE-HORIZON RUIN PROBABILITIES 277
16
Z3
Z1
r+(1) T+(1) T+(1)
Figure 5.3
In the following, II ' II denotes the total variation norm between probabilitymeasures and ® product measure.
Lemma 5.5 Ilp(u,n) (y1, ... , Y„-1, Yn - u) E •) - Bo (ri-1) ®B(,,u) II 0.
Proof We shall use the easily proved fact that if A'(u), A"(u) are events suchthat P(A'(u) AA"(u)) = o(F (A'(u)) (A = symmetrical difference of events),then
IIP( I A'(u)) - P(. I A"(u))II -+ 0.Taking A'(u) = {Y,, > u},
A"(u) _ {K(u)=n} = {Y1+ +Yn-1<u,Yl+ +Yf1>u},
the condition on A'(u) A A"(u) follows from Bo being subexponential (Proposi-
tion 1.2, suitably adapted). Further, P(. I A'(u)) = P(u,n),
P (Yj,...,Yn-1iYn - u) E • I A'(u)) = Bo (n-1) ®Bou) .

278 CHAPTER IX. HEAVY TAILS
Lemma 5 .6 IIPIu'n ) ((Z1'..., Zn) E •) - Bo (n-1) ®Bo' 0.
Proof Let (Y11, Z11),..., (Y,,, Zn), be independent random vectors such that the
conditional distribution of Zk given Y.' = y is BM, k = 1, ... , n, and that Yk has
marginal distribution B0 for k = 1, . . . , n - 1 and Y„ - u has distribution Bout
That is, the density of Yn is B(y)/[IBBO(u)], y > u. The same calculationas given above when n = 1 shows then that the marginal distribution of Zn
is Bou). Similarly (replace u by 0), the marginal distribution of Zk is Bo fork < n, and clearly Zi, ... , Zn are independent. Now use that if the conditionaldistribution of Z' given Y' is the same as the conditional distribution of Z givenY and JIF(Y E •) - P(Y' E •)II -* 0, then 11P(Z E •) - P(Z' E •)II -> 0 (here
Y, Y', Z, Z' are arbitrary random vectors, in our example Y = (Y1, ... , Y")
etc.). q
Proof of Theorem 5.4. The first step is to observe that K(u) has a proper limit
distribution w.r.t. P(u) since by Theorem 2.1,
n_1 < u, Y1 +... + Y" > u)Flul (K (u) = n) _ Cu) P"F(1'i +...+y
1 p"F(Yn > u) P)Pn-1P/(1 - P) Bo(u)
for n = 1, 2, .... It therefore suffices to show that the P(u'")-distribution of
T(u) has the asserted limit. Let {wl(z)},..., {wn(z)} be i.i.d. copies of {w(z)}.
Then according to Section 5a, the F'-distribution of r(u) is the same as
the P'-distribution of w1(Zl) + • • • + wn(Zn). By Lemma 5.6, wk(Zk) has
a proper limit distribution as u -+ oo for k < n, whereas wn(Zn) has the same
limit behaviour as when n = 1 (cf. the discussion just before the statement ofTheorem 5.4). Thus
F(u'n)(T(u) /7(u) > y) = F(u'n)((wl (Z1)+ ... +wn(Zn))l7(u ) > 1y)
^' P(u'n)(wn (Zn)/7(u) > y) -4 NW/(1 - P) > y)
Corollary 5.7 O (u,,y(u)T) - 1 P PBo(u) • P(W/(1 - p) < y).
Notes and references Excursion theory for general Markov processes is a fairly
abstract and advanced topic. For Theorem 5.2, see Fitzsimmons [144]), in particular
his Proposition (2.1).

6. RESERVE-DEPENDENT PREMIUMS 279
The results of Section 5b are from Asmussen & Kluppelberg [36] who also treatedthe renewal model and gave a sharp total variation limit result . Extensions to theMarkov-modulated model of Chapter VI are in Asmussen & Hojgaard [33].
Asmussen & Teugels [53] studied approximations of i (u, T) when T -+ oo with ufixed; the results only cover the regularly varying case.
6 Reserve-dependent premiums
We consider the model of Chapter VII with Poisson arrivals at rate /3, claim sizedistribution B, and premium rate p(x) at level x of the reserve.
Theorem 6 .1 Assume that B is subexponential and that p(x) -> 00, x -> oo.Then
0 (u) Qfu"O ^) dy. (6.1)
The key step in the proof is the following lemma on the cycle maximum ofthe associated storage process {Vt}, cf. Corollary II.3.2. Assume for simplicitythat {Vt} regenerates in state 0 , i.e. that fo p(x)-1 dx < oo, and define the cycleas
a = inf{t>0: Vt=0, max VB>0I Vo=0^o<s<t J11JJJ
Lemma 6 .2 Define M,, = supo<t<0, V. Then P(MT > u) - /3Ea B(u).
The heuristic motivation is the usual in the heavy-tailed area, that MQ becomeslarge as consequence of one big jump. The form of the result then follows bynoting that the process has mean time Ea to make this big jump and that itthen occurs with intensity /3B(u). More precisely, one expects the level y formwhich the big jump occurs to be 0(1); the probability that is exceeds u is thenB(u - y) - B(u). The rigorous proof is, however, non-trivial and we refer toAsmussen [22].
Proof of Theorem 6.1. We will show that the stationary density f (x) of {Vt}satisfies
f (x) /B(x)r(x)
We then get
V,(u) = P(V > u) = f f (y) dy - (3 J B(y) dy ,u u p(Y)
and the result follows.

280 CHAPTER IX. HEAVY TAILS
Define D(u) as the steady-state rate of downcrossings of {Vt} of level u
and Da (u) as the expected number of downcrossings of level u during a cycle.Then D(u) = f(u)p(u) and, by regenerative process theory, D(u) = DQ(u)/µ.
Further the conditional distribution of the number of downcrossings of u duringa cycle given Mo > u is geometric with parameter q(u) = P(Mo > u I Vo = u).
Hence
f (u)r(u) = D(u) = Do(u) - P(MT > u) $B(u)
Ft µ(1 - q (u)) 1 - q(u)
Now just use that p(x) -* oo implies q (x) -+ 0. q
Notes and references The results are from Asmussen [22], where also the (easier)
case of p (x) having a finite limit is treated . It is also shown in that paper that typically,
there exist constants c(u) -4 0 such that the limiting distribution of r(u)/c(u) given
r(u) < oo is exponential.

Chapter X
Simulation methodology
1 Generalities
This section gives a summary of some basic issues in simulation and Monte Carlomethods . We shall be brief concerning general aspects and refer to standardtextbooks like Bratley, Fox & Schrage [77], Ripley [304], Rubinstein [310] orRubinstein & Melamed [311] for more detail ; topics of direct relevance for thestudy of ruin probabilities are treated in more depth.
la The crude Monte Carlo method
Let Z be some random variable and assume that we want to evaluate z = EZin a situation where z is not available analytically but Z can be simulated. Thecrude Monte Carlo ( CMC) method then amounts to simulating i.i.d. replicatesZl,... , ZN, estimating z by the empirical mean (Z1 + • • + ZN)/N and thevariance of Z by the empirical variance
N N
s2 = E(Z{ - z)2 =NE
Zit 2.
i-i i-i
According to standard central limit theory , vrN-(z - z) 4 N(0, 4Z), where a2 =Var(Z ). Hence
1.96sz f (1.2)
is an asymptotic 95% confidence interval , and this is the form in which the resultof the simulation experiment is commonly reported.
281

282 CHAPTER X. SIMULATION METHODOLOGY
In the setting of ruin probabilities, it is straightforward to use the CMCmethod to simulate the finite horizon ruin probability z = i,b(u, T): just simulate
the risk process {Rt} up to time T (or T n 7-(u)) and let Z be the indicator that
ruin has occurred,
Z = I inf Rt < 0 = I('r(u) < T).(0<t<T
The situation is more intricate for the infinite horizon ruin probability 0(u). Thedifficulty in the naive choice Z = I(T(u) < oo) is that Z can not be simulated infinite time: no finite segment of {St} can tell whether ruin will ultimately occuror not. Sections 2-4 deal with alternative representations of Vi(u) allowing to
overcome this difficulty.
lb Variance reduction techniques
The purpose of the techniques we study is to reduce the variance on a CMCestimator Z of z, typically by modifying Z to an alternative estimator Z' withEZ' = EZ = z and (hopefully) Var(Z') < Var(Z). This is a classical areaof the simulation literature, and many sophisticated ideas have been devel-oped. Typically variance reduction involves both some theoretical idea (in somecases also a mathematical calculation), an added programming effort, and a
longer CPU time to produce one replication. Therefore, one can argue that un-
less Var(Z') is considerable smaller than Var(Z), variance reduction is hardlyworthwhile. Say that Var(Z') = Var(Z)/2. Then replacing the number of
replications N by 2N will give the same precision for the CMC method as when
simulating N' = N replications of Z', and in most cases this modest increase ofN is totally unproblematic.
We survey two methods which are used below to study ruin probabilities,conditional Monte Carlo and importance sampling. However, there are otherswhich are widely used in other areas and potentially useful also for ruin prob-abilities. We mention in particular (regression adjusted) control variates and
common random numbers.
Conditional Monte Carlo
Let Z be a CMC estimator and Y some other r .v. generated at the same timeas Z. Letting Z' = E[Z I Y], we then have EZ = EZ = z, so that Z' is acandidate for a Monte Carlo estimator of z. Further, writing
Var(Z) = Var(E [Z I Y]) + E(Var[Z I Y])

1. GENERALITIES 283
and ignoring the last term shows that Var(Z') < Var(Z) so that conditional
Monte Carlo always leads to variance reduction.
Importance sampling
The idea is to compute z = EZ by simulating from a probability measure Pdifferent from the given probability measure F and having the property that
there exists a r.v. L such that
z = EZ = E[LZ]. (1.3)
Thus , using the CMC method one generates (Z1, L1),. .. , (ZN, LN) from P and
uses the estimatorN
zrs = N > L:Zj
and the confidence interval
i=1
1.96 sis 2 1N
2 1 N 2 2 2zrs fv^
where srs = N j(LiZi - zrs) = N > Lt Zi - zrs.i=1 i=1
In order to achieve (1.3), the obvious possibility is to take F and P mutuallyequivalent and L = dP/dP as the likelihood ratio.
Variance reduction may or may not be obtained: it depends on the choice ofthe alternative measure P, and the problem is to make an efficient choice.
To this end, a crucial observation is that there is an optimal choice of P:define P by dP/dP = Z/EZ = Z/z, i.e. L = z/Z (the event {Z = 0} is not a
concern because P(Z = 0) = 0). Then
zVar(LZ) = E(LZ)2 - [E(LZ)] = E Z2 Zz - E [Z Z]2 = z2 - z2 = 0.
Thus, it appears that we have produced an estimator with variance zero. How-ever, the argument cheats because we are simulating since z is not avaliableanalytically. Thus we cannot compute L = Z/z (further, it may often be im-possible to describe P in such a way that it is straightforward to simulate from
P).Nevertheless, even if the optimal change of measure is not practical, it gives
a guidance: choose P such that dP/dP is as proportional to Z as possible. This
may also be difficult to assess , but tentatively, one would try to choose P to
make large values of Z more likely.

284 CHAPTER X. SIMULATION METHODOLOGY
1c Rare events simulation
The problem is to estimate z = P(A) when z is small , say of the order 10-3
or less. I.e., Z = I(A) and A is a rare event. In ruin probability theory, A =
{T(u) < T} or A = {r(u) < oo} and the rare events assumption amount to ubeing large, as is the case of typical interest.
The CMC method leads to a variance of oZ = z(1 - z) which tends to zeroas z ^ 0. However, the issue is not so much that the precision is good as thatrelative precision is bad:
oZ z(1 - z) 1-> 00.
Z z V5
In other words , a confidence interval of width 10 -4 may look small, but if thepoint estimate z is of the order 10-5, it does not help telling whether z is ofthe magnitude 10-4, 10-5 or even much smaller . Another way to illustrate theproblem is in terms of the sample size N needed to acquire a given relativeprecision , say 10%, in terms of the half-width of the confidence interval. Thisleads to the equation 1.96oz /(zV) = 0.1, i.e.
N - 100 - 1.96 2Z (1 - z) 100-1.96 2z2 z
increases like z-1 as z .0. Thus, if z is small, large sample sizes are required.We shall focuse on importance sampling as a potential (though not the only)
way to overcome this problem. The optimal change of measure ( as discussedabove) is given by
P(B) = E [ i;B] = iP(AB) = P(BIA).Z z
I.e., the optimal P is the conditional distribution given A. However, just thesame problem as for importance sampling in general comes up: we do not knowz which is needed to compute the likelihood ratio and thereby the importancesampling estimator, and further it is usually not practicable to simulate fromP(•IA). Again, we may try to make P look as much like P(•IA) as possible. Anexample where this works out nicely is given in Section 3.
Two established efficiency criteria in rare events simulation are bounded rel-
ative error and logarithmic efficiency. To introduce these, assume that the
rare event A = A(u) depends on a parameter u (say A = {r(u) < oo}). Foreach u, let z(u) = P(A(u)), assume that the A(u) are rare in the sense thatz(u) -* 0, u -+ oo, and let Z(u) be a Monte Carlo estimator of z(u). We then

2. SIMULATION VIA THE POLLACZECK-KHINCHINE FORMULA 285
say that {Z(u)} has bounded relative error if Var(Z(u))/z(u)2 remains boundedas u -3 oo. According to the above discussion, this means that the sample sizeN = NE(u) required to obtain a given fixed relative precision (say a =10%)remains bounded. Logarithmic efficiency is defined by the slightly weaker re-quirement that one can get as close to the power 2 as desired: Var(Z(u)) should
go to 0 as least as fast as z(u)2-E, i.e.
Var(Z(u))hm sup < oo (1.4)U-+00 z (u) 2-E
for any e > 0. This allows Var(Z(u)) to decrease slightly slower than z(u)2,
so that NE (u) may go to infinity. However, the mathematical definition putscertain restrictions on this growth rate, and in practice, logarithmic efficiencyis almost as good as bounded relative error. The term logarithmic comes from
the equivalent form- log Var(Z(u))
lim inf > 2u-+oo - log z(u)
of (1.4).
Notes and references For surveys on rare events simulation, see Asmussen &
Rubinstein [45] and Heidelberger [190].
2 Simulation via the Pollaczeck-Khinchine for-
mula
For the compound Poisson model, the Pollaczeck-Khinchine formula III.(2.1)
may be written as V) (u) = P(M > u), where M = X1 + • • • + XK, where
X1, X2, ... are i .i.d. with common density bo(x) = B(x)/µB and K is geometric
with parameter p, P(K = k) = (1 - p)pk. Thus, O (u) = z = EZ, where
Z = I(M > u) may be generated as follows:
1. Generate K as geometric, F(K = k) = (1 - p)pk.
2. Generate X1, ... , XK from the density bo(x). Let M - X1 + + XK.
3. If M > u, let Z +- 1. Otherwise , let Z +- 0.
The algorithm gives a solution to the infinite horizon problem , but as a CMC
method , it is not efficient for large u . Therefore , it is appealing to combine with
some variance reduction method . We shall here present an algorithm developed
by Asmussen & Binswanger [271, which gives a logarithmically efficient estimator

286 CHAPTER X. SIMULATION METHODOLOGY
when the claim size distribution B (and hence Bo) has a regularly varying tail.So, assume in the following that Bo(x) - L(x)/x`' with a > 0 and L(x) slowlyvarying. Then (cf. Theorem IX.2.1) V)(u) - p/(l - p)Bo(x), and the problem isto produce an estimator Z(u) with a variance going to zero not slower (in thelogarithmic sense ) than Bo(u)2.
A first obvious idea is to use conditional Monte Carlo: write
i,b(u) = P (Xl +•••+XK>u)
= EF[Xl + ...+XK > uIXl,...,XK-1]
= EBo(u-X1 - ...-XK_1).
Thus, we generate only X1, ... , XK-1, compute Y = u - X1 - - XK_1and let Z(1)(u) = Bo (Y) (if K = 0, Z(1)(u) is defined as 0). As a conditionalMonte Carlo estimator , Z(1) (u) has a smaller variance than Zl (x). However,asymptotically it presents no improvement : the variance is of the same order ofmagnitude F(x). To see this, just note that
EZ(1)(u ) 2 > E[Bo (x - Xl - ... - SK-1)2; Xl > x, K > 2]
= P2p(Xl > x) = P2Bo(x)
(here we used that by positivity of the X;, X1 + + XK_ 1 > x when X1 > x,and that Bo(y) = 1, y < 0).
This calculation shows that the reason that this algorithm does not workwell is that the probability of one single Xi to become large is too big. The ideaof [27] is to avoid this problem by discarding the largest X; and considering onlythe remaining ones . For the simulation, we thus generate K and X1i ... , XK,form the order statistics
X(1) < X(2) < ... < X(K)
throw away the largest one X(K), and let
Z(2)(u) = P (SK > u I X(l),X(2),...,X(K-1))
_ B0((u - S( K_1)) V X(K-1))
/Bo(X(K -1))
where S(K_l) = X(1) + X(2) + • • • + X(K_1). To check the formula for theconditional probability, note first that
P(X(n) > x I X(1),X(2),...,X(n_1))Bo(X(„_l) V X)
Bo(X(n-1))

3. IMPORTANCE SAMPLING VIA LUNDBERG CONJUGATION 287
We then get
P(S" > x I X( 1), X(2), ... , X(n-1))
P(X(TZ) + S(,_1) > X X(1), X(2), ... , X(.-l))
P(X(n) > X - S(n_1) I X(1), X(2), ... , X(n-1))
_ Bo((x - S(n-1)) V X(.-l))
BO(X(n-1))
Theorem 2 . 1 Assume that Bo (x) = L(x)/x° with L(x) slowly varying. Then
the algorithm given by { Z (2) (u) } is logarithmically efficient.
Notes and references The proof of Theorem 2.1 is elementary but lengty, and
we refer to [27]. The algorithm is sofar the only efficient one which has been developed
for the heavy-tailed case. Asmussen , Binswanger and HOjgaard of [28] give a general
survey of rare events simulation for heavy-tailed distributions , and that paper contains
one more logarithmically efficient algorithm for the compound Poisson model using the
Pollaczeck-Khinchine formula and importance sampling . However , it must be noted
that a main restriction of both algorithms is that they are so intimately tied up withthe compound Poisson model because the explicit form of the Pollaczeck-Khinchine
formula is crucial (say, in the renewal or Markov-modulated model P(r+ < oo) and
G+ are not explicit ). Also in other respects the findings of [28] are quite negative: thelarge deviations ideas which are the main approach to rare events simulation in the
light-tailed case do not seem to work for heavy tails.
3 Importance sampling via Lundberg conjuga-
tion
We consider again the compound Poisson model and assume the conditions ofthe Cramer-Lundberg approximation so that z(u) = '(u) Ce-7", use the
representation 0(u) = e-7sr(u) = e-7"ELe-7E(") where ^(u) = ST(") - u is the
overshoot (cf. 111.5), and simulate from FL, that is, using 13L, BL instead of
0, B, for the purpose of recording Z(u) = e-rysr(u).For practical purposes, the continuous-time process {St} is simulated by
considering it at the discrete epochs {Qk} corresponding to claim arrivals. Thus,
the algorithm for generating Z = Z(u) is:
1. Compute -y > 0 as solution of the Lundberg equation
0 = K(y) = )3(B[y] - 1) - y,
and define )3L, BL by I3L = /3B[-y], BL(dx) = e7sB(dx)/B[y].

288 CHAPTER X. SIMULATION METHODOLOGY
2. Let Sf-0
3. Generate T as being exponential with parameter ,l3 and U from B. LetS - S+U - T.
4. If S > u, let Z F e_'s. Otherwise, return to 3.
There are various intuitive reasons that this should be a good algorithm. Itresolves the infinite horizon problem since FL(,r(u) < oo) = 1. We may expecta small variance since we have used our knowledge of the form of 0(u) to isolatewhat is really unknown, namely ELe-ry£("), and avoid simulating the knownpart e-7". More precisely, the results of IV.7 tell that P(. r(u) < oo) and FL(both measures restricted to.F,(u)) are asymptotically coincide on {r(u)} < oo,so that changing the measure to FL is close to the optimal scheme for importancesampling , cf. the discussion at the end of Section 1b. In fact:
Theorem 3.1 The estimator Z(u) = e-'rs* "u) (simulated from FL) has boundedrelative error.
Proof Just note that EZ(u)2 < e-2ryu _ z (u)2/C2. q
It is tempting to ask whether choosing importance sampling parameters ,Q, bdifferent from ,QL, BL could improve the variance of the estimator . The answeris no . In detail , to deal with the infinite horizon problem , one must restrictattention to the case 4µB > 1. The estimator is then
M(u) /3e-QT' dBZ(u) (Ui)
j=1 )3e-$Ti dB
where M(u) is the number of claims leading to ruin, and we have:
Theorem 3.2 The estimator (3.1) (simulated with parameters ^3, B) is not log-arithmically efficient when (/3, b) # (/3L, BL).
The proof is given below as a corollary to Theorem 3.3.The algorithm generalizes easily to the renewal model . We formulate this
in a slightly more general random walk setting '. Let X1, X2, ... be i.i.d. withdistribution F, let S,, = X1 + ... + X,,, M(u) = inf {n : S„ > u}, and assumethat µF < 0 and that F[y] = 1, P'[-y] < oo for some ry > 0. Let FL (dx) =
'For the renewal model, Xi = U; -Ti, and the change of measure F -r FL corresponds toB -> BL, A -> AL as in Chapter V.

3. IMPORTANCE SAMPLING VIA LUNDBERG CONJUGATION 289
e7yF(dx). The importance sampling estimator is then Z(u) = e-'rSM( ). More
generally, let F be an importance sampling distribution equivalent to F and
M(u) dFZ(u) _ I -(Xi) . (3.2)
dF
Theorem 3.3 The estimator (3.2) (simulated with distribution F of the X3has bounded relative error when .P = FL. When F # FL, is not logarithmically
efficient.
Proof The first statement is proved exactly as Theorem 3 . 1. For the second,
write
W(F IF) _ -F(XI)... -F(XM(u)).
By the chain rule for Radon-Nikodym derivatives,
EFZ(u)2 = EeW2(FIF) = Ep [W2(FIFL)W2(FLIF)]
= EL [W2 (FIFL)w(FLIF)] = ELexp{Kl+...+KM(u)},
where
Klog (X) (j) 2) = -log dFL (Xi) - 2'X1 .
Here ELK; = c'- 2ryELXi, where
e' = -EL Iog dFL (Xi) > 0
by the information inequality. Since K1, K2, ... are i.i.d., Jensen's inequality
and Wald's identity yield
EpZ(u)2 > exp {EL(K1 + ... + KM(u))}
= exp {ELM(u)(E - 2ryELXi)} .
Since ELM(u)/u -+ 1/ELXi, it thus follows that for 0 < e < e'/ELXi,
EFZ(u)2 EFZ(u)2
ulim
-+oosup z(u)2eeU = lim cop C2e-2,yu+elu
e-try' 1> lim up C2e-2,yu = G,2 > 0,

290 CHAPTER X. SIMULATION METHODOLOGY
which completes the proof. q
Proof of Theorem 3.2. Consider compound Poisson risk process with intensi-ties /3', /3", generic interarrival times T' , T", claim size distributions B', B" andgeneric claim sizes U ', U". Then according to Theorem 3.3, all that needs to
be shown is that if U' - T' = U" - T", then /3' B' = B". First bythe memoryless distribution of the exponential distribution , U' - T' has a leftexponential tail with rate /3' and U" - T" has a left exponential tail with rate/3'. This immediately yields /3' = 3". Next, from
P(U'-T'>x)^ ^
=f f
/3'e-Q'YR'(x + y) dy = ,3'eO'x e-Q'zB (z) dz,
P (U" - T" > x)
J /3"e-0 yB (x + y) dy = ,3"eQ x J e-Q zB (z) dz0 x
(x > 0) and /3' = /3", U' - T' D U" - T", we conclude by differentiation that
Bo(x)=B' (x)forallx > 0,i.e.B'=B". q
Notes and references The importance sampling method was suggested by Sieg-mund [343] for discrete time random walks and further studied by Asmussen [ 13] in thesetting of compound Poisson risk models . The optimality result Theorem 3.1 is fromLehtonen & Nyrhinen [244], with the present (shorter and more elementary) prooftaken from Asmussen & Rubinstein [45]. In [13], optimality is discussed in a heavytraffic limit y 10 rather than when u -+ oo.
The extension to the Markovian environment model is straightforward and wassuggested in Asmussen [ 16]. Further discussion is in Lehtonen & Nyrhinen [245].
The queueing literature on related algorithms is extensive , see e.g. the referencesin Asmussen & Rubinstein [45] and Heidelberger [190].
4 Importance sampling for the finite horizon case
The problem is to produce efficient simulation estimators for '0 (u, T) with T <oo. As in IV.4, we write T = yu. The results of IV.4 indicate that we can expecta major difference according to whether y < 1/r,'(-y) or y > 1/r.'(-y). The easycase is y > 1/k'(-y) where O(u, yu) is close to zk(u), so that one would expectthe change of measure F -4 FL to produce close to optimal results. In fact:
Proposition 4.1 If y > 1/ic'('y), then the estimator Z(u) = e-7Sr(°)I(r(u) <yu) (simulated with parameters /3L, BL) has bounded relative error.

4. IMPORTANCE SAMPLING FOR THE FINITE HORIZON CASE 291
Proof The assumption y > 1/n'(-y) ensures that 1fi(u, yu)/z,(u) -* 1 (Theo-rem IV.4.1) so that z(u) = zP(u, yu) is of order of magnitude a-71. BoundingELZ(u)2 above by a-7u, the result follows as in the proof of Theorem 3.1. q
We next consider the case y < 1/r.'(7). We recall that ay is defined as
the solution of a'(a) = 1/y, that ryy = ay - yk(ay) determines the order of
magnitude of z'(u, yu) in the sense that
- log 4')u) -4
u 7y
(Theorem IV.4.8), and that ryy > ry. Further
,O(u, yu) = e-ayu Eay Le-ay^(u)+r(u)K(ay); T(u) < yu] . (4.2)
Since the definition of ay is equivalent to Eay r(u) - yu, one would expect that
the change of measure F Pay is in some sense optimal. The correspondingestimator is
Z(u) = e-avS' ( u)+T(u)K (ay)I(T(u) < yu),
and we have:
(4.3)
Theorem 4.2 The estimator (4.3) (simulated with parameters /gay, Bay) is log-
arithmically efficient.
Proof Since ryy > -y, we have ic(ay ) > 0 and get
Eay Z(u)2 = Eay[e-
2aySr( u)+2r(u )r.(ay);T(u) < yu]
e-2ryyuEay le-2ay^(u); T(u) <
yu]
e -27yu .
Hence by (4.1),
- log Var(Z(u)) _ - log Var(Z(u))lim inf lim
of > 2u--oo - tog x (u ) .yyu
so that (1.5) follows. q
Remark 4 .3 Theorem IV.4.8 has a stronger conclusion than (4.1), and in fact,
(4.1) which is all that is needed here can be showed much easier . Let Qy2 =

292 CHAPTER X. SIMULATION METHODOLOGY
Vara„ (-r(u))/u so that (T(u) - yu)/(uyu1/2) . N(0,1) (see PropositionIV.4.2). Then
z(u)1= Eay Z(u) > Eay
Le-avS'(u)+T(u)k(av
); yu - o ,u1/2 < r(u) < yu]l= e-ayu+l/ur' (av)Ei`av re-av^(u)+(T(++)-(U) yu - o.yu1/2 <1 T(u) < yul
> e-7vu+avul/2r.(av)Eav lre-avt(u); yu - Qyu1/2 < T(u) C yul
e- ryyu+oyu1/2K'(av)Eo 1/2)v
where the last step follows by Stam's lemma (Proposition IV.4.4). Hence
lira inf logx(u) > hm inf
-ryyu + vyu1/2 tc(ay) - -7yu-+Oo U - u-aoo U
That lim sup < follows similarly but easier as when estimating En,, Z (u)2 above.0
Notes and references The results of the present section are new. In Asmussen
[13], related discussion is given in a heavy traffic limit q J. 0 rather than when u -3 oo.
5 Regenerative simulation
Our starting point is the duality representations in 11.3: for many risk processes{Rt }, there exists a dual process { V t} such that
i,b(u,T) = P inf Rt < 0 = P(VT > u),O<t<T
'%(u) = P I info Rt < 0) = P(VV > u), (5.1)
where the identity for Vi(u) requires that Vt has a limit in distribution V.In most of the simulation literature (say in queueing applications), the object
of interest is {Vt} rather than {Rt}, and (5.1) is used to study Voo by simulating{Rt} (for example, the algorithm in Section 3 produces simulation estimates forthe tail P(W > u) of the GI/G/1 waiting time W). However, we believe thatthere are examples also in risk theory where (5.1) may be useful. One mainexample is {Vt} being regenerative (see A.1): then by Proposition A1.3,
zi(u) = INV. > u) = -E f I(VV > u) dt (5.2)0

5. REGENERATIVE SIMULATION 293
where w is the generic cycle for {Vt}. The method of regenerative simulation,
which we survey below , provides estimates for F ( V,, > u) (and more general
expectations Eg(V... )). Thus the method provides one answer on to how toavoid to simulate { Rt} for an infinitely long time period.
For details , consider first the case of independent cycles . Simulate a zero-
delayed version of {V t } until a large number N of cycles have been completed.
For the ith cycle, record Zi'i = (Z1'), Z2'>) where Zi'i = w, is the cycle length,
Z2'> the time during the cycle where {Vt} exceeds u and zj = EZJ'), j = 1, 2.
Then Z(1), ... , Z(N) are i . i.d. and
EZ1'i = z1 = Ew, EZ2'i = z2 = E J 'o I (Vt > u) dt .0
Thus, letting
Z1 = (Zl1i +... + Z1N>) , Z2 = N (X21' + ... + Z2N)) ,
Zl Z(1) +...+Z(N)
the LLN yields Z1 a$' z1, Z2 a4* z2,
(u) ?2 = E fo I(Vt > u) dt = 0(u )
zl Ew
as N -> oo. Thus, the regenerative estimator z%(u) is consistent.To derive confidence intervals , let E denote the 2 x 2 covariance matrix of
Z('). Then(Z1-z1i Z2-z2 ) 4 N2(0,E).
Therefore , a standard transformation technique (sometimes called the deltamethod ) yields
1 - V 2(h (Zi, Z2 - h (zl, z2)) -> N(O, oh)
for h : R2 -^ R and Ch = VhEVh, Vh = (8h/8z1 8h/8z2). Taking h(zl, z2)
i 1/zl),z2/z1 yields Vh = (-z2/z2
(^(u) - t(u)) 4 N(0, 02) (5.3)

294 CHAPTER X. SIMULATION METHODOLOGY
where 201 2 =
Z2Eli + 2E22 - 2
Z2E1 2
z1 z1 z1
The natural estimator for E is the empirical covariance matrix
N
S = N 1 12 (ZW - Z) ^Z(=) - z^
so a2 can be estimated by
i=1
2
2 = 72 S11+ 12 S22 - 2- g S12 (5.5)Z1 Z1 Z1
and the 95% confidence interval is z1 (u) ± 1.96s/v"N-.The regenerative method is not likely to be efficient for large u but rather a
brute force one. However , in some situations it may be the only one resolvingthe infinite horizon problem , say risk processes with a complicated structure ofthe point process of claim arrivals and heavy -tailed claims . There is potentialalso for combining with some variance reduction method.
Notes and references The literature on regenerative simulation is extensive, see
e.g. Rubinstein [310] and Rubinstein & Melamed [311].
6 Sensitivity analysis
We return to the problem of 111 .9, to evaluate the sensitivity z/i( (u ) = (d/d() 0(u)where ( is some parameter governing the risk process . In 111.9, asymptoticestimates were derived using the renewal equation for z /i(u). We here considersimulation algorithms which have the potential of applying to substantially morecomplex situations.
Before going into the complications of ruin probabilities , consider an ex-tremely simple example , the expectation z = EZ of a single r.v. Z of the formZ = ^p(X) where X is a r .v. with distribution depending on a parameter (. Hereare the ideas of the two main appfoaches in today 's simulation literature:
The score function (SF) method . Let X have a density f (x, () dependingon C. Then z(() = f cp(x) f (x, () dx so that differentiation yields
zS d( fco(x)f(x,C)dx = f w(x) d( f (x, () dx
f Ax) (dl d()f (x' () f (z, () dx = E[SZ]f(X,0

6. SENSITIVITY ANALYSIS 295
where
S = (d/d()f (X, () = d log f (X, C)f(X,() d(
is the score function familiar from statistics . Thus, SZ is an unbiased
Monte Carlo estimator of z(.
Infinitesimal perturbation analysis (IPA) uses sample path derivatives. So
assume that a r.v. with density f (x, () can be generated as h(U, () where
U is uniform(0,1). Then z(() = Ecp(h(U, ()),
zc = E [d( co(h(U, C)), = E [`d (h (U, ()) d( hc(U, C),
where h( (u, () = (8/8()h (u, () Thus, cp' (h(U, ()) h((U, () is an unbiased
Monte Carlo estimator of zS. For example , if f (x, () _ (e-Sx, one can
take h(U, () = - log U/(, giving h( (U, () = log U/(2.
The derivations of these two estimators is heuristic in that both use aninterchange of expectation and differentiation that needs to be justified. Forthe SF method, this is usually unproblematic and involves some application ofdominated convergence . For IPA there are, however , non-pathological exampleswhere sample path derivatives fail to produce estimators with the correct expec-tation . To see this, just take cp as an indicator function , say W(x) = I(x > xo)
and assume that h(U, () is increasing in C. Then , for some Co = (o(U), cp(h(U, ())
is 0 for C < Co and 1 for C > Co so that the sample path derivative cp'(h(U, ())
is 0 w . p. one . Thus , IPA will estimate zS by 0 which is obviously not correct.In the setting of ruin probabilities , this phenomenon is particularly unpleasantsince indicators occur widely in the CMC estimators . A related difficulty occursin situations involving the Poisson number Nt of claims : also here the samplepath derivative w.r.t. /3 is 0. The following example demonstrates how the SFmethod handles this situation.
Example 6 .1 Consider the sensitivity tka(u) w.r.t. the Poisson rate /3 in the
compound Poisson model. Let M(u) be the number of claims up to the time
r(u) of ruin (thus, r(u) = Tl + • • • +TM(u)). The likelihood ratio up to r(u) for
two Poisson processes with rates /3, /3o is
M(u)Oe
-(3T:
/3oe-OoT; I(r(u)< oo) .
11

296 CHAPTER X. SIMULATION METHODOLOGY
Taking expectation, differentiating w.r.t. j3 and letting flo = 0, we get
1M(u)
00(u) = E (_Ti)I(T(U)<)
E [(M(u) - T(u)) I(T(u) < co)] .
To resolve the infinite horizon problem , change the measure to FL as whensimulating tp(u). We then arrive at the estimator
ZZ(u) =(M(u) - T(u)) e-7ue--rVu)
for ?P,3 (u) (to generate Zp (u), the risk process should be simulated with param-eters ,3L, BL).
We recall (Proposition 111.9 .4) that V5,3 (u) is of the order of magnitude ue-7u.Thus, the estimation of z(ip(u) is subject to the same problem concerning relativeprecision as in rare events simulation . However, since
1\ 2
ELZp(u)2<
(M(U) _T(u))a-2ryu = O(u2)e-27u,
we haveVarL(ZQ(u)) O(u2)e-2
-yu - 0(1)ZO(u)2 u2e-2ryu
so that in fact the estimator Zf(u) has bounded relative error. 0
Notes and references A survey of IPA and references is given by Glasserman [161](see also Suri [358] for a tutorial), whereas for the SF method we refer to Rubinstein &
Shapiro [312]. Example 6.1 is from Asmussen & Rubinstein [46] who also work out anumber of similar sensitivity estimators, in part for different measures of risk than ruinprobabilities, for different models and for the sensitivities w.r.t. different parameters.
There have been much work on resolving the difficulties associated with IPApointed out above. In the setting of ruin probabilities, a relevant reference is Vazquez-Abad [374].

Chapter XI
Miscellaneous topics
1 The ruin problem for Bernoulli random walkand Brownian motion. The two-barrier ruinproblem
The two-barrier ruin probability 0,,(u) is defined as the probability of beingruined (starting from u) before the reserve reaches level a > u. That is,
Y'a(U) = P(T (u) = r+(a)) = 1 - P(•r(u, a) = r(u)),
wherel
T(u) = inf {t > 0 : Rt < 0} , T+(a) = inf It > 0 : Rt > al,
T(u, a) = r(u) A T+(a).
Besides its intrinsic interest , Oa(U ) can also be a useful vehicle for computingt/i(u) by letting a -* oo.
Consider first a Bernoulli random walk, defined as Ro = u (with u E{0,1,...... }), R„ = u+X,+• • •+X,, where X1, X2, ... are i.i.d. and {-1,1}-valuedwith P(Xk = 1) = 9.
'Note that in the definition of r(u ) differs from the rest of the book where we use r(u) =inf {t > 0 : Rt < 0} (two sharp inequalities ); in most cases , either this makes no difference(P(R.,(u) = 0 ) = 0) or it is trivial to translate from one set-up to the other, as e.g. in theBernoulli random walk example below.
297

298 CHAPTER XI. MISCELLANEOUS TOPICS
Proposition 1.1 For a Bernoulli random walk with 0 0 1/2,
C1_0\a- (1-B)u
0-
o J I\ e(u) = 1 oa ' a = u , u + 1,.... (1.1)
()io
auIf 0 = 1/2, then 'Oa(u) _
a
We give two proofs , one elementary but difficult to generalize to other models,and the other more advanced but applicable also in some other settings.Proof 1. Conditioning upon X1 yields immediately the recursion
'a(1) = 1-9+00a(2),
tba(2) _ (1 - o)T/la (1) + 8z/'u(3),
7/la(a - 2) = (1-9)4/'0(a-3)+9ba(a-1),
Oa(a - 1) = (1 - o)'t/1a(a - 2),
and insertion shows that ( 1.1) is solution. q
Proof 2. In a general random walk setting , Wald's exponential martingale isdefined as in 11.(4.4) by
ea(u+Xl+...+Xn)
F[ a]nn=0,1,...
where a is any number such that Ee°X = F[a] <oo. We choose a = -ry wherery is the Lundberg exponent, i.e. the solution of F[-,y] = 1, and in view of thediscrete nature of a Bernoulli random walk we write z = e-7. The martingaleis then {zuzXl+•••+X„ } = {zR° }. The Lundberg equation becomes
1=F[-ry]=(1-9)+9z,z
and the solution is z = (1 - 0)/0. By optional stopping,
zu = EzRO = EzRT(u,o»
= z°P (RT ( u,a) = 0) + zap (R,r(u,a)
= z°Va(u) + za(1 - Y,a(u)),

1. RANDOM WALK; BROWNIAN MOTION; TWO BARRIERS 299
and solving for 4/la(u) yields t/ia(u) = (za - zu)/(za - 1).
If 9 = 1/2, (1.2) is trivial (z = 1). However, {R,,} is then itself a martingaleand we get in a similar manner
u = ER° = ERra(u) = 0 • Y'a (u) + all - Y'a(u)), pa(u) _
Corollary 1.2 For a Bernoulli random walk with 9 > 1/2,
1h (u) =
\1
a el u
a-u
u
If 9 < 1/2, then Vi(u) = 1.
qProof Let a-+ oo in (1.1).
Proposition 1.3 Let {Rt} be Brownian motion starting from u and with drift
p and unit variance . Then for p 0 0,
,• a-2µa - e-2µu
,ba(u) = e-2µa - 1
If p = 0, then 'Oa (U) --
Proof Since
a-u
a
Eea(R°- u) = et(a2 /2+aµ)
the Lundberg equation is rye/2-'yp = 0 with solution y = 2p. Applying optionalstopping to the exponential martingale {e-7R, } yields
e-7u= Ee-7R° = e°Wa(u) + e-7a(1 - 0a(u)),
and solving for 9/la(u) yields Z/)a(u) = (e-76 - e-7u)/(e-7° - 1) for p # 0.
If p = 0, {Rt} is itself a martingale and just the same calculation as in the
proof of Proposition 1.1 yields 't/la(u) = (a - u)/u. q
Corollary 1.4 For a Brownian motion with drift u > 0,
i1(u) = e-211 . (1.5)
If p<0, thenz1 (u)=1.

300 CHAPTER XI. MISCELLANEOUS TOPICS
Proof Let a -* oo in (1.4). q
The reason that the calculations work out so smoothly for Bernoulli ran-dom walks and Brownian motion is the skip-free nature of the paths, implyingR(u,a) = a on {r (u,a) = -r+ (a)} and similarly for the boundary 0. For moststandard risk processes , the paths are upwards skip-free but not downwards,and thus one encounters the problem of controlling the undershoot under level0. Here is one more case where this is feasible:
Example 1.5 Consider the compound Poisson model with exponential claims(with rate, say, 5). Here the undershoot under 0 is exponential with rate 5, andhence
e-7u = Ee-7Ro
= E [e-7R(,, , a) I R(u a) < 0] P (R(u ,a) < 0) + e-7°P (R(u,a) = a)5
P (R < 0) + -7aF (R = )
=
e(u,a ) (u,a) ayIc
-'° 1 -+' 7/la(u)).e (pa(u)5-ry
Using y = 6 - 3, we obtain
'Oa a-7u - e-7a
(u) = 6/0 - e-7a
Again , letting a -* oo yields the standard expression pe-7u for .0 (u) (wherep =,616), valid if p < 1 (otherwise , 7/'(u) = 1). q
However, passing to even more general cases the method quickly becomesunfeasible (see, however, VIII.5a). It may then be easier to first compute theone-barrier ruin probability O(u):
Proposition 1.6 If the paths of {Rt} are upwards skipfree and 7//(a) < 1,
0. (u) _ O(u) - 0(a) 0 < u < a.1 - vi(a)
Proof By the upwards skip-free property,
7O(u) = 7/la(u) + (1 - +^a(u))^(a)
If 7k(a) < 1, this immediately yields (1.7).
(1.7)

1. RANDOM WALK; BROWNIAN MOTION; TWO BARRIERS 301
Note thas this argument has already been used in VII.1a for computing ruinprobabilities for a two-step premium function.
We now return to Bernoulli random walk and Brownian motion to considerfinite horizon ruin probabilities. For the symmetric (drift 0) case these are easilycomputable by means of the reflection principle:
Proposition 1.7 For Brownian motion with drift 0,
0(u, T) = P(T(u) < T ) = 241, (i). (1.8)
Proof In terms of the claim surplus process {St} = {u - Rt}, we have ili(u,T)P(MT > u) where MT = maxo<t<T St. Here {St } is Brownian motion withdrift 0 (starting from 0), in particular symmetric so that from time r(u) (wherethe level is level u) it is equally likely to go to levels < u and levels > u in timeT - r(u). Hence
P(MT>u,ST<u) = P(MT>u,ST>U),
P(MT > u) = P(ST > u) + P(ST < u, MT > u)
= P (ST > u) + P (ST > u, MT > U)
= P(ST > u) + P(ST > u) (1.9)
= 2P(ST > u).
Corollary 1.8 Let {Rt} be Brownian motion with drift -µ so that {St} isBrownian motion with drift µ . Then the density and c.d .f. of -r(u) are
( U2Pµ (T(u ) E dT) = 2^T -3/2 exp µu - 2 , + µ2T) } , ( 1.10)
Pµ (T(u) < T ) = 1 - 4) I = - µ3T I + e2µ"4) ( !....- - µ%T) (1.11)VIT
Proof For p = 0, (1.11 ) is the same as (1.8 ), and (1 . 10) follows then by straight-
forward differentiation. For µ # 0, the density dPµ /dP0 of St is eµst-tµ2/2, andhence
Pµ('r(u) E dT) = Eo [e µsr(,.)_ _( u)µ2 /2; T(u) E dT,
= eµu-Tµ2/2Po (T(u) E dT)2
eµu-Tµ2/2 u T-3/2 ex p u27r p 1-2 T

302 CHAPTER XI. MISCELLANEOUS TOPICS
which is the same as (1.10). (1.11) then follows by checking that the derivativeof the r.h.s. is (1.10) and that the value at 0 is 0. q
Small modifications also apply to Bernoulli random walks:
Proposition 1.9 For Bernoulli random walk with 9 = 1/2,
Vi(u,T) = P(ST = u) + 2P (ST > u), (1.12)
whenever u, T are integer-valued and non-negative. Here
P(ST = v) ={2-T( (v-}TT)/2) v=-T,-T+2,...,T-2,T
0 otherwise.
Proof The argument leading to ( 1.9) goes through unchanged , and (1.12) is thesame as ( 1.9). The expression for F (ST = v) is just a standard formula for thebinomial distribution. q
The same argument as used for Corollary 1.8 also applies to the case 9 54 1/2,but we omit the details.
We finally consider a general diffusion {Rt} on [0, oo) with drift µ(x) andvariance a2 (x) at x. We assume that u(x) and a2 (x) are continuous with a2 (x) >
0 for x > 0. Thus, close to x {Rt} behaves as Brownian motion with driftµ = u(x) and variance a2 = a2(x), and in a similar spirit as in VII.3 we candefine the local adjustment coefficient y(x) as the one -2µ(x)/a2(x) for thelocally approximating Brownian motion. Let
s(y) = ef0 ry(.T)dx, S(x) = f x s(y)dy, S(oo) = f c s(y)dy. (1.13)0 0
The following results gives a complete solution of the ruin problem for the dif-fusion subject to the assumption that S(x), as defined in (1.13) with 0 as lowerlimit of integration, is finite for all x > 0. If this assumption fails, the behaviourat the boundary 0 is more complicated and it may happen, e.g, that 0(u), as de-fined above as the probability of actually hitting 0, is zero for all u > 0 but thatnevertheless Rt ^4 0 (the problem leads into the complicated area of boundaryclassification of diffusions, see e.g. Breiman [78] or Karlin & Taylor [222] p. 226).
Theorem 1.10 Consider a diffusion process {Rt} on [0, oo), such that the driftµ(x) and the variance a2(x) are continuous functions of x and that a2(x) > 0

1. RANDOM WALK; BROWNIAN MOTION; TWO BARRIERS 303
for x > 0. Assume further that S (x) as defined in (1.13 ) is finite for all x > 0.If
S(oo) < 00,
then 0 < 2l.(u) < 1 for all u > 0 and
(1.14)
^ (1 15)
S^
Conversely, if (1.14) fails, then,0(u) = 1 for all u > 0.
.
Lemma 1.11 Let 0 < b < u < a and let t&0,b(u) be the probability that {Rt}
hits b before a starting from u. Then
YIa,b(u) = S(a) - S(u) (1.16)S(a) - S(b)
Proof Recall that under mild conditions on q, E„ q(Rdt) = q(u)+Lq(u)dt, where
Lq(u) = 0'22u) q "(u) + p(u)q(u)
is the differential operator associated with the diffusion. If b < u < a, we can
ignore the possibility of ruin or hitting the upper barrier a before dt, so that
Y)n,b('u) = Eu &0,b(Rdt), and we get
Wo,b('u) = Eu , O,b (Rdt) = Oa,b(u) + L,ba,b(u)dt,
i.e LVa,b = 0. Using s '/s = -2p/a2, elementary calculus shows that we canrewrite L as
Lq(u) 1a2 (u)s(u)dd
[ ?] . (1.17)s (u )
Hence L,ba,b = 0 implies that VQ b/s is constant, i.e. Wa,b = a+/3S. The obvious
boundary conditions '0a,b(b) = 1, 1', ,b(a) = 0 then yield the result. 0
Proof of Theorem 1.10. Letting b J. 0 in (1.16) yields 4b (u) = 1 - S(u)/S(a).
Letting a T oo and considering the cases S(oo) = oo, S(oo) < oo separately
completes the proof. q
Notes and references All material of the present section is standard. A classical
reference for further aspects of Bernoulli random walks is Feller [142]. For general-
izations of Proposition 1.6 to Markov-modulated models , see Asmussen & Perry [42].
Further references on two-barrier ruin problems include Dickson & Gray [116], [117].
A good introduction to diffusions is in Karlin & Taylor [222]; see in particular pp.
191-195 for material related to Theorem 1.10. In view of (1.16), the function S(x) is

304 CHAPTER XI. MISCELLANEOUS TOPICS
referred to as the natural scale in the general theory of diffusions (in case of integrabil-ity problems at 0, one works instead with a lower limit 5 > 0 of integration in (1.13)).Another basic quantity is the speed measure M , defined by the density 1/va(u)s(u)showing up in (1.17).
Markov-modulated Brownian models , with the drift and the variance dependingon an underlying Markov process , is currently an extremely active area of research;much of the literature dels with the pure drift case, correponding to piecewise linearpaths or , equivalently, variance 0, which is motivated from the study of modern ATM(asynchronous transfer mode ) technology in telecommunications. The emphasis isoften on stationary distributions , but by duality, information on ruin probabilitiescan be obtained . See Asmussen [20] and Rogers [305] for some recent treatments andreferences to the vast literature.
2 Further applications of martingales
Consider the compound Poisson model with adjustment coefficient ry and the fol-lowing versions of Lundberg 's inequality (see Theorems 111.5.2, 111 .6.3, IV.4.5):
z/'(u) < e_7u, (2.1)
C_e-7u < t(u) < C+e_7u, (2.2)
where
B(x) B(x)C_ =
2no fy° e7(Y )B(dy)' C+
_sup
f2e7(Y-2)B(dy)'
1i/i(u, yu) < e-7yu, y < k (y), (2.3)
'+/1(u) - t&(u, yu) < e-7yu, y > - (7) , (2.4)
where
W (ay) = y, 7y = ay - ytc (ay). (2.5)
A martingale proof of (2.1 ) was given already in II.1, and here are alternativemartingale proofs of the rest . They all use the fact that
(( e-aRt - tx(a) l = e-au+aSt-tx(a)
I. Lo I. Lo
is a martingale (cf. Remark 11.4.9 ) and optional stopping applied to the stoppingtime r(u) A T, yielding
e-au = Ee-aRo-o•K(a) = Ee-aR,(,.)AT - (T(u)AT) r.(a) (2.6)

2. FURTHER APPLICATIONS OF MARTINGALES 305
(we cannot use the stopping time r(u) directly because P(-r(u) = oo) > 0 andalso because the conditions of the optional stopping time theorem present aproblem).
Proof of (2.2): As noted in Proposition II.1.1 , it follows easily from (2.6) with= 'y that
e--yu
- E [e-7R,( u ) I T(U) < 00].
Let H(dt, dr) denote the conditional distribution of (T(u), RT(u)_) given r(u) <
oo. A claim leading to ruin at time t has c.d.f. (B(y) - B(r))/B(r), y > r, whenRt_ = r. Equivalently, -Rt has distribution B(r + dy)/B(r). Hence
E [e-7Rr (u) Jr(u) < ool^00 H(dt, dr
) f e7'B(r + dy)B(r) JoJO Zoo
^00
o
^00 H(dt, dr) e7(y-r)B(dy)0 B(r) fr oo
> I / H(dt, dr) 1 = 10 o C+ C+
From this the upper inequality follows, and the proof of the lower inequality issimilar. q
Proof of (2.3), (2.4): We take a = ay in (2.6). For (2.3), we have tc(ay) > 0 andwe can bound (2.6) below by 1
E Le-7Rr(,.)-r(u)r.(ay)I T(u) < yu] P(r(u) < yu) > e-yu"(ay )Yij(u,yu)
(using RT(u) < 0), so that
i/1(uLeyu) < e-ayu , eyuk(ay) = e-7yu
Similarly for (2.4), we have ic(ay ) < 0 and use the lower bound
E [e-7Rr („)-T(u)K(ay) I yu < r(u) < T] F(yu < r(u) < T)
> e- yuk (ay)(u&(u,T)- V,(u,yu))•
Letting T -+ oo yield
e_ayu> e-yur4ay)(0(u) - b(u , yu))•
Notes and references See II.1.

306 CHAPTER XI. MISCELLANEOUS TOPICS
3 Large deviations
The area of large deviations is a set of asymptotic results on rare event proba-bilities and a set of methods to derive such results. The last decades have seena boom in the area and a considerable body of applications in queueing theory,not quite so much in insurance risk.
The classical result in the area is Cramer's theorem. Cramer considered a
random walk Sn = X1 + ... + X. such that the cumulant generating function
r.(B) = log EeOX 1 is defined for sufficiently many 0, and gave sharp asymptoticsfor probabilities of the form P (S,,/n E I) for intervals I C R. For example, ifx > EX1, then C S.
> x e-nn 1P - ^n 0o 2xn
(3.1)
where we return to the values of 0, ri, v2 later.The limit result (3.1) is an example of sharp asymptotics : - means (as at
other places in the book) that the ratio is one in the limit (here n -* oo). How-ever , large deviations results have usually a weaker form, logarithmic asymp-totics , which in the setting of (3.1) amounts to the weaker statement
lim 1 log P I Sn > x I = -17.n--roo n n ///
Note in particular that (3.1) does not capture the \ in (3.1) but only thedominant exponential term - the correct sharp asymptotics might as well havebeen , e.g., cle-nn or C2e-,?n
+ ,3nawith a < 1. Thus , large deviations results
typically only give the dominant term in an asymptotic expression . Accordingly,logarithmic asymptotics is usually much easier to derive than sharp asymptoticsbut also less informative . The advantage of the large deviations approach is,however , its generality, in being capable of treating many models beyond sim-ple random walks which are not easily treated by other models , and that aconsiderable body of theory has been developed.
For sequences fn, gn with fn -+ 0 , gn -4 0 , we will write fn 1-og gn if
lim 109 fn = 1n-ioo log gn
(later in this section, the parameter will be u rather than n). Thus, (3.2) can
be rewritten as F (Sn/n > x) 1-g a-'fin.
Example 3.1 We will go into some more detail concerning (3.1), (3.2).

3. LARGE DEVIATIONS 307
Define rc* as the convex conjugate of rc,
rc*(x) = sup(Ox - r.(0))e
(other names are the entropy, the Legendre-Fenchel transform or just the Legen-dre transform or the large deviations rate function). Most often, the sup in thedefinition of rc* can be evaluated by differentiation: rc*(x) = Ox - rc(0) where0 = 0(x) is the solution of x = rc'(0), which is a saddlepoint equation - themean rc'(0) of the distribution of X1 exponentially tilted with 0, i.e. of
P(X1 E dx) = E[e9X1-K.(e)i XI E dx], (3.3)
is put equal to x. In fact, exponential change of measure is a key tool in largedeviations methods.
Define ,q = rc* (x). Since
Pnn
> x) = E {e_8 ' ( 9).rtnS > x1 ,
replacing Sn in the exponent and ignoring the indicator yields the Chernoffbound
P Sn > x 1 < e-°n (3.4)n
Next, since Sn is asymptotically normal w.r.t. P with mean nx and varianceno, 2 where o2 = o2(x) = rc"(0), we have
P(nx < Sn < nx + 1.960/) -* 0.425,
and hence for large n
P(Sn/n > x) > E [e-9S„+n' ( 9); nx < Sn < nx + 1.96o /]
> 0.4 e-nn+1.sseo f
which in conjunction with (3.4) immediately yields (3.2).More precisely, if we replace Sn by nx + o / V where V is N(0,1), we get
E [e-9nx+nK(9)-9" '; V> 01P(Sn/n > x)
1
Bo 27rn= e-tin
e-9o^y 1 e-y2/2 dye- tin
fo o') 21r

308 CHAPTER XI. MISCELLANEOUS TOPICS
which is the same as (3.1), commonly denoted as is the saddlepoint approxima-
tion. The substitution by V needs, however, to be made rigorous; see Jensen
[215] or [APQ] p. 260 for details. q
Further main results in large deviations theory are the Gartner-Ellis theo-
rem, which is a version of Cramer's theorem where independence is weakened to
the existence of c(O) = limn,o log Ee9Sn /n, Sanov's theorem which give rare
events asymptotics for empirical distributions, Mogulskii's theorem which gives
path asymptotics, that is, asymptotics for probabilities of the form
P ({S[nti/n}o<t<l E r)
for a suitable set r of functions on [0, 1], and the Wentzell-Freidlin theory ofslow Markov walks, which is of similar spirit as the dicussion in VII.3.
In the application of large deviations to ruin probabilities, we shall con-centrate on a result which give asymptotics under conditions similar to theGartner-Ellis theorem:
Theorem 3 .2 (GLYNN & WHITT [163]) Let X1, X2, ... be a sequence of r.v.'s,
and write Sn = X1 + • • • + Xn, r(u) = inf {n : Sn > u} and o(u) = P('r(u) <
oo). Assume that there exists 'y, e > 0 such that
(i) Kn (0) = log Ee°Sn is well-defined and finite for 'y - e < 8 < -y + e;
(ii) lim supn.,,. Ee9X n < oo for -e < 0 < e;
(iii) #c (8) = limn, n Icn(0) exists and is finite for ry - e < 8 < y + e;
(iv) tc(ry) = 0 and r. is differentiable at ry with 0 < K'(-y) < 00.
Then i/.'(u) )Ng a-"u.
For the proof, we introduce a change of measure for X1, ... , Xn given by
Fn(dxl,...,dxn) = 05n-Kn(7)Fn(dx1,...,dxn)
where Fn is the distribution of (X1i ... , Xn) and sn = x1 + • • • + xn (note thatthe r.h.s. integrates to 1 by the definition of Icn). We further write µ = tc'(ry).
We shall need:
Lemma 3 .3 For each i > 0, there exists z E (0, 1) and no such that
Sn- p
n> 7 < zn,
Pn Sn-1 - /^>7 < zn
for n n0.

3. LARGE DEVIATIONS 309
Proof Let 0 < 9 < e where a is as in Theorem 3.2. Clearly,
- n nn(Sn/n > {c+77) < e no(µ+n)Enees = e- ne(µ+n)elcn(B+7)- r (7)P
limsup 1 log Pn (Sn/n > µ + 17) < ic(9 + ry) - Bµ - 077n-^oo n
and by Taylor expansion and (iv ), the r . h.s. is of order -91) + o(O ) as 0 J. 0, inparticular the r . h.s. can be chosen strictly negative by taking 9 small enough.This proves the existence of z < 1 and no such that Pn (Sn/n > µ.+r7) < zn forn > no. The corresponding claim for Pn(Sn/n < µ - 77) follows by symmetry(note that the argument did not use µ > 0). This establishes the first claim ofthe lemma , for Sn.
For Sn-1i we have
Fn(Sn -1/n > µ+r7) < e-ne(µ+1?)EneeS„-1 = e-ne (µ+n)EneeSn-eX„
e-no(µ+n) Ee(e+7)Sn -ex„ -wn (7)
< e- ne(µ+o)-w"(7) [Eep(B+7)Sn]1 /p [Ee-goX,.]1/q
= e-ne(p+ 17)- Kn(7)e'n (p(O+7))/p IEe -geXn]1/q
where we used Holder's inequality with 1/p+ 1/q = 1 and p chosen so close to
1 and 0 so close to 0 that j p(0 +,y) - 71 < e and jq9j < e. Since I Ee-qOX„ ] 1/q is
bounded for large n by (ii), we get
lim sup 1 log Pn (Sn-1 /n > µ + r7) < -0(1i + r7) + i(p(0 +'Y))/pn-+oo n
and by Taylor expansion, it is easy to see that the r.h.s. can be chosen strictlynegative by taking p close enough to 1 and 0 close enough to 0. The rest of theargument is as before. q
Proof of Theorem 3.2. We first show that lim inf„_,,,,, log zl'(u)/u > -'y. Letr7 > 0 be given and let m = m(77) = [u(1 + 77)/µ] + 1. Then
V, (U) P(S,n > u) = Em 1e- -YS- +r-- W; Sm > u]
km e-7Sm+n.m(7). S. > mµ
[ 1 +17]
Em
[em
m(7);S,n
- > - µ?7m µ 1 + rl

310
>
Here E,,,(•) goes to 1 by Lemma 3. 3, and since Ic,n(ry)/u
(1 + r7)/µ, we get
µ7 1
< 1+ 77 )
-4 0andm/u-*
lum infz/i(u) 1 + 2r7>_ -ry 1 +
77
Letting r7 J. 0 yields liminfu __,,,. logO(u)/u > -ry.
For lim supu,0 log i'(u )/u < -'y, we write
'i/I(u) _ E P(T(u) = n) = Il + I2 + I3 + I400n=1
wheren(b) Lu(1-0/µJ
Ii = 1: F(T(u) = n), I2 = F(T(u) = n),n=n(b)+1
Lu(1 +6) /µJ 00
13 = E F(T (u) = n), 14 = P(T(u) = n)
Lu(1-6)/aJ+1 Lu(1+6)/µJ+l
and n(S) is chosen such that icn('y)/n < 6 A (- log z) /2 and
Fn\Sn
n
CHAPTER XI. MISCELLANEOUS TOPICS
]Em I e- YS +^c (7); I
M`S- - I < µl1 IIL 1+77
1+277 S,nexp 1-_Yµ 1 + m + r
77('Y) } U n \ m - µ
n=1
>lb+S) <Zn, Pn \> la+ 8 I < zn (3.6)
for some z < 1 and all n > n(E); this is possible by (iii), (iv) and Lemma 3.3.
Obviously,
P(T(u) = n) < P(Sn > u) = En [e-7S,.+wn(7); Sn > u]
< e-Yu+Kn(7)pn(Sn > u) (3.7)
so that
n(b)
I1 < e-'Yu E en.(-Y),
n=1

3. LARGE DEVIATIONS 311
I2
Finally,
-7u r00 1 n e-7ue L^ xn/2x x 1 /2
[u(1+6)/µJ+1 1 -
Thus an upper bound for z/'(u) is
uY13 < C" E ekn(7) < e'
Lu(1-6)/µJ+l1lu(1-6)/lij+1
< e-7U C 26u+1 I e6u(1+6)/µ
`p /
< e--(U 1 zn < e-7u E Zn/2=
E xn/2n=n(6)+1 n=0
[u(1+6)/µJ 1u (1+6) /µJ
Lu(1-6)/µJ
< e-"u e'n(Y)P(Sn > u)
n=n(6)+1
Lu(1-6)/µJ ^,
< e-ryu e-n logz/2p nnt n, -µ
n=n(6)+1 \
1u(1-6)/µ1 00 e--Yu
1 - zl/z
en6
00
E F(Sn_1 < u, S. > u)Lu(1+6) /µJ +l
00
[e-)^n 'YSn+kn (7) ;Sn-1 C U, Sn > U]
(u(1+6)/µJ+l
< e--Yu e-n('Y ) fPn (I Sn 1 - ' 1 + b)n(u(1+6)/µJ+1
I4 <
n(6)e-'Yu eKn (7) + 2 + (28U + 1) e6u(1+6)/µ
1 - zl /2Fin=1
and using (i), we get
lim sup log O(U) < -y + b(1 + b)
u-/00 U
(3.10)
(3.11)
Letbl0. q

312 CHAPTER XI. MISCELLANEOUS TOPICS
The following corollary shows that given that ruin occurs, the typical timeis u/rc'(7) just as for the compound Poisson model, cf. IV.4.
Corollary 3.4 Under the assumptions of Theorem 3.2, it holds for each b > 0
that
0(u) 1' g F(T(u) E (u(1 - b)/i(7), u(1 + b)/i(7))
Proof Since
V,(u) = I1+I2+I3+I4'^ e-ry(u), 13 = P(T (u) E (u(1 -b)l^ (7),u(1+b)/rc'(7)),
it suffices to show that for j = 1, 2, 4 there is an aj > 0 and a cj < oo such
that Ij < c3e-7' a-"ju. For 14, this is straightforward since the last inequalityin (3.11 ) can be sharpened to
x [u(1+6)/µJ /2
41 - z 1/z
For I1, I2, we need to redefine n(b) as L,3ui where ,Q is so small that w =1 - 4/3rc'(-y) > 0. For 12, the last steps of (3.9) can then be sharpened to
I2 < e-7u 1 - xl/2
to give the desired conclusion.For I,, we replace the bound P(Sn > u ) < 1 used in (3.8) by
P(S,, > u) <e-"'EeIsn = e-ctueKn (a+'Y)-Kn(7)
where 0 < a < e and a is so small that r.(7 + a) < 2arc'(7). Then for n large,
say n n1, we have
rcn (a + 7) < 2n ►c(7 + a) < 4narc' (7).
Letting c11 = maxn<n, e'- ('+'Y), we get
IlLou]
E exp {-(7 + a)u + Kn(a +7)}
n=1
Lou]exp {-(-y + a)u} { 111 + exp {4narc'(7)}
n=1
exp {-('y + a)u} c1 exp {4/3uarc'(7)} = cle-ryue-«iu ,
x LQuJ /2
where a1 = aw. q

3.,-LARGE DEVIATIONS 313
Example 3 .5 Assume the Xn form a stationary Gaussian sequence with meanp < 0. It is then well-known and easy to prove that Sn has a normal distributionwith mean np and a variance wn satisfying
i00
lim -wn = wz = Var(X1 ) + 2 E Cov(Xl, Xk+l)n-aoo n
k=1
provided the sum converges absolutely. Hence
nr-n(9) _
z z\ 2 zn Cn0p+BZn/ -* ,(O) = 9µ+02
for all 9 E R, and we conclude that Theorem 3 .2 is in force with -y = -2p/wz.
11
Inspection of the proof of Theorem 3.2 shows that the discrete time structureis used in an essential way. Obviously many of the most interesting exampleshave a continuous time scale. If {St}t> 0 is the claims surplus process, thekey condition similar to (iii), (iv) becomes existence of a limit tc(9) of tct(9) _log Ee8S° It and a y > 0 with a(y) = 0, r.'(-y) > 0. Assuming that the furtherregularity conditions can be verified, Theorem 3.2 then immediately yields theestimate
F( sup Skh > u)log
a-7u (3.12)k=0,1,...
for the ruin probability z/-'h(u) of any discrete skeleton {Skh}k=0,1,.... The prob-lem is whether this is also the correct logarithmic asymptotics for the (larger)ruin probability O(u) of the whole process, i.e. whether
P ( sup St > u ltg a ^"0<t<oo //
(3.13)
One would expect this to hold in considerable generality, and in fact, criteriaare given in Duffield & O'Connell [124]. To verify these in concrete examplesmay well present considerable difficulties, but nevertheless, we shall give twocontinuous time examples and tacitly assume that this can be done. The readernot satisfied by this gap in the argument can easily construct a discrete timeversion of the models!
The following formula (3.14) is needed in both examples . Let {Nt}t>0 bea possibly inhomogeneous Poisson process with arrival rate ,3(s) at time s. Anevent occuring at time s is rewarded by a r.v. V(s) with m.g.f. 09(9). Thus thetotal reward in the interval [0, t] is
Rt = E V (Un)
n: o„ <t

314 CHAPTER XI. MISCELLANEOUS TOPICS
where the an are the event times. Then
rtlogEeOR° = J /3(s)(^8(9) - 1) ds (3.14)
0
(to see this , derive , e.g., a differential equation in t).
Example 3.6 We assume that claims arrive according to a homogeneous Pois-son process with intensity 0 , but that a claim is not settled immediately. More
precisely, if the nth claim arrives at time a,, , then the payments from the com-
pany in [on, O'n +S] is a r .v. Un(s). Thus, assuming a continuous premium inflow
at unit rate , we have
S, = U„ (t - Q„) - t,n: o, <t
which is a shot-noise process . We further assume that the processes {U1(s)}8>0
are i . i.d., non-decreasing and with finite limits Un as s T oo (thus , Un represents
the total payment for the nth claim). We let ic (9) = 3(EeWU° - 1) - 0 and
assume there are -y, e > 0 such that ic('y) = 0 and that r. (9) < oo for 9 < 'y + C.
If the nth claim arrives at time Qn = s, it contributes to St by the amount
Un(t - s). Thus by (3.14),
t tKt (0 ) J (Ee9U"it-8i - 1) ds - 9t = /3 J (Ee8U° i8l - 1) ds - 9t,0 0
and since EeOUn(8) -+ Ee°U^ as s -* oo, we have rct (9)/t -4 ic(9). Since theremaining conditions of Theorem 3.2 are trivial to verify, we conclude that
Cu) log e-7u (cf. the above discussion of discrete skeletons).It is interesting and intuitively reasonable to note that the adjustment coeffi-
cient ry for the shot-noise model is the same as the one for the Cramer-Lundberg
model where a claim is immediately settled by the amount Un. Of course, the
Cramer-Lundberg model has the larger ruin probability. 0
Example 3 . 7 Given the safety loading 77, the Cramer-Lundberg model implic-
itly assumes that the Poisson intensity /3 and the claim size distribution B (or
at least its mean µB) are known. Of course , this is not realistic . An apparent
solution to this problem is to calculate the premium rate p = p(t) at time t
based upon claims statistics . Most obviously, the best estimator of /3µB based
upon Ft-, where Ft = a(A8 : 0 < s < t), At = ;'`1 U;, is At- It. Thus, one
would take p(t) = (1 + rt)At-/ t, leading to
St = At-(1+77) J t S8 ds. (3.15)oo

3. LARGE DEVIATIONS 315
With the Qi the arrival times, we have
Nt t N. Ui Nt / t
St = Ui - (1 +i) fo
> i= 1 ds = E Ui 1 - (1 + r7) log t (3.16)s 01i
i=1 i=1
Let ict (a) = log Eeast . It then follows from (3.14) that
r t(a [1_( i+77)log]) ds_flt_ 13 J = t (a) (3.17)
o
(a[I + (1 + 77) log u]) du -)3. (3.18)1K(a) _fo O
Thus (iii) of Theorem 3.2 hold, and since the remaining conditions are trivial to
verify, we conclude that t,b(u) IN a-'Yu (cf. again the above discussion of discreteskeletons) where y solves ic('y) = 0
It is interesting to compare the adjustment coefficient y with the one y* ofthe Cramer-Lundberg model, i.e. the solution of
/3(Eelu - 1) - (1 + 17)0µB = 0. (3.19)
Indeed, one hasy > y' (3.20)
with equality if and only if U is degenerate. Thus, typically the adaptive pre-mium rule leads to a ruin probability which is asymptotically smaller than forthe Cramer-Lundberg model . To see this , rewrite first rc as
te(a) _ /3E 1 1eau 1 - /3. (3.21)
+(1+77)aUJ
This follows from the probabilistic interpretation Si EN '1 Yi where
Yi = Ui( 1+(1 +r7)log ©i) = Ui(1-(1 +17)Vi)
where the Oi are i .i.d. uniform (0,1) or , equivalently, the Vi = - log Oi are i.i.d.standard exponential , which yields
Ee°Y = E [O(1+n)aueaul = E [eau f1 t(1+n)audtl = E reau
J L Jo J L1+(l+r))aUJ

316 CHAPTER XI. MISCELLANEOUS TOPICS
Next, the function k(x) = e7*x - 1 - (1 + ri)y*x is convex with k(oo) = 00,
k(0) = 0, k'(0) < 0, so there exists a unique zero xo = xo(r7) > 0 such that
k(x) > 0, x > x0, and k(x) < 0, 0 < x < x0. Therefore
e7'U _ k(U)
E [1+(1+77)y*U] - 1 E [1+(1+77)y*U]
L xa 1 +
k(+ *y B(+ f
0
1 + (1(+71)y*y B(dy)
+ (1 + rl) Y* xo jJxo k(y) B(dy) + f ' k(y) B(dy) } = 0,
using that Ek(U) = 0 because of (3.19). This implies n(y*) < 0, and since tc(s),a* (s) are convex with tc'(0) < 0 , rc*' (0) < 0, this in turn yields y > y*. Further,y = y* can only occur if U - xo. 11
Notes and references Some standard textbooks on large deviations are Bucklew
[81], Dembo & Zeitouni [105] and Shwartz & Weiss [339].In addition to Glynn & Whitt [163], see also Nyrhinen [275] for Theorem 3.2.
For Example 3.7, see Nyrhinen [275] and Asmussen [25]; the proof of (3.20) is due toTatyana Turova.
Further applications of large deviations idea in risk theory occur in Djehiche [122],Lehtonen & Nyrhinen [244], [245], Martin-L6f [256], [257] and Nyrhinen [275].
4 The distribution of the aggregate claims
We study the distribution of the aggregate claims A = ^N' U; at time t, as-suming that the U; are i.i.d. with common distribution B and independent ofNt. In particular, we are interested in estimating P(A > x) for large x. Thisis a topic of practical importance in the insurance business for assessing theprobability of a great loss in a period of length t, say one year. Further, thestudy is motivated from the formulas in IV.2 expressing the finite horizon ruinprobabilities in terms of the distribution of A.
The main example is Nt being Poisson with rate fit. For notational simplicity,we then take t = 1 so that
p,, = P(N = n) = e-(3an
However, much of the analysis carries over to more general cases, though we donot always spell this out.

4. THE DISTRIBUTION OF THE AGGREGATE CLAIMS 317
4a The saddlepoint approximation
We impose the Poisson assumption (4.1). Then Ee"A = e'(") where x(a) _0(B[a] - 1). The exponential family generated by A is given by
Pe(A E dx) = E [eeA -K(9); A E dx] .
In particular,
no(a) = logE9e'A = rc(a + 9) - ic(9) = ,3e(bo[a] - 1)
where )30 = ,3B[9] and Be is the distribution given by
eoxB9(dx) = B [9] B(dx).
This shows that the Pe-distribution of A has a similar compound Poisson formas the F-distribution, only with 0 replaced by a9 and B by B9.
The analysis largely follows Example 3.1. For a given x, we define thesaddlepoint 9 = 9(x) by EBA = x, i.e. K'(0) _ ic'(9) = x.
Proposition 4.1 Assume that lim8T8. B"[s] = oo,
B"' [s]lim (B",[s])3/2 = 0,818'
where s' = sup{s : B[s] < oo}. Then as x -* oo,
e-9x+K(°)P(A > x)
B 2ir /3 B" [9]
Proof Since EBA = x, Vare(A) = s;"(0) = ,3B"[9], (4.2) implies that the limitingPe-distribution of (A - x)//3B"[9] is standard normal. Hence
x)]
P(A > x) = Ee [e-9A+ ic(9); A > x)] = e-ex+K( e)E9 [e-9(A-x); A >x)]
e-ex+K(e) e-e AB°[ely 1 e-v2/2 dy0 2^
-9x+p(e) 00e e-ze-z2/(2BZpB „[9)) dz
9 27r/3B" [9] foe-ex+w ( e) oo e-ex+w(B)
J z dz0 27r /3B" [9] o e 9 2 /3B" [9]

318 CHAPTER XI. MISCELLANEOUS TOPICS
It should be noted that the heavy-tailed asymptotics is much more straight-forward. In fact, just the same dominated convergence argument as in the proofof Theorem 2.1 yields:
Proposition 4.2 If B is subexponential and EzN < oo for some z > 1, then
P(A > x) - EN B(x).
Notes and references Proposition 4.1 goes all the way back to Esscher [141], and(4.2) is often referred to as the Esscher approximation.
The present proof is somewhat heuristical in the CLT steps. For a rigorous proof,
some regularity of the density b(x) of B is required. In particular, either of the following
is sufficient:A. b is gamma-like, i.e. bounded with b(x) - ycix°-ie-6xB. b is log-concave, or, more generally, b(x) = q(x)e-h(z), where q(x) is bounded
away from 0 and oo and h (x) is convex on an interval of the form [xo,x') where
x' = sup {x : b(x) > 0}. Furthermore 00 b(x)Sdx < oo for some ( E (1, 2).For example, A covers the exponential distribution and phase-type distributions, Bcovers distributions with finite support or with a density not too far from a-x° with
a > 1. For details, see Embrechts et al. [138], Jensen [215] and references therein.
4b The NP approximation
In many cases , the distribution of A is approximately normal . For example,
under the Poisson assumption (4.1), it holds that EA = ,l3pB, Var(A) _ ^3p.2i
and that (A - (3µB)/(0µB^))1/2 has a limiting standard normal distribution asQ -^ oo, leading to
P(A > x) :; 1 - (D X - Q{AB (4.3)
The result to be surveyed below improve upon this and related approximationsby taking into account second order terms from the Edgeworth expansion.
Remark 4 . 3 A word of warning should be said right away : the CLT (and theEdgeworth expansion) can only be expected to provide a good fit in the centerof the distribution . Thus , it is quite questionable to use (4.3) and related resultsfor the case of main interest , large x. q
The (first order) Edgeworth expansion states that if the characteristic func-tion g(u) = Ee"`}' of a r.v. Y satisfies
9(u) ti e-u2/2(1 + ibu3) (4.4)

4. THE DISTRIBUTION OF THE AGGREGATE CLAIMS 319
where b is a small parameter, then
P(Y < y) 4(y) - 6(1 - y2)^P(y)•
Note as a further warning that the r.h.s. of (4.5) may be negative and is notnecessarily an increasing function of y for jyj large.
Heuristically, (4.5) is obtained by noting that by Fourier inversion, the den-sity of Y is
9(y) =1 °°_ e-iuy f(u) du
2x _.f °o
1 e-'uye-u2/2(1 + iSu3) du27r
_ cc(y) - 5(y3 - 3&(y),
and from this (4.5) follows by integration.In concrete examples , the CLT for Y = Y6 is usually derived via expanding
the ch.f. as
u2 u3 u49(u) = Ee'uY = exp {iuci - 2X2 - 2K3 + 4i 64 + .. .
where Kl , ,c2i... are the cumulants ; in particular,
s;l = EY, K2 = Var (Y), K3 = E(Y - EY)3.
Thus if EY = 0, Var(Y) = 1 as above , one needs to show that 163, K4 .... aresmall. If this holds , one expects the u3 term to dominate the terms of orderu4, u5, ... so that
1(u) exp { - 2 2 - i 33
K3 } Pt^ exp - 2 ^ \1 - i 6 r 1 3
so that we should take b = -ic3/6 in (4.5).Rather than with the tail probabilities F(A > x), the NP (normal power)
approximation deals with the quantile al_E, defined as the the solution of P(A <yl-e) = 1 - e. A particular case is a.99, which is often denoted VaR (the Valueat Risk).
Let Y = (A - EA)/ Var(A) and let yl_E, zl_e be the 1 - e-quantile in thedistribution of Y, resp. the standard normal distribution. If the distribution ofY is close to N(0,1), yl-E should be close to zl_E (cf., however, Remark 4.3!),and so as a first approximation we obtain
a1_E = EA + yl-e Var(A) .: EA + zl_E Var(A) . (4.6)

320 CHAPTER XI. MISCELLANEOUS TOPICS
A correction term may be computed from (4.5) by noting that the 4;(y) termsdominate the S(1 - y2)cp(y) term. This leads to
1 - E -t(yl -E) - 6 (1 - yi-E)A13l -E)
4)(yl -E) - 5(1 - zl-E)^o(zl -E)
^'.. 4(z1-E) + (yl-E - zl -E)V(zl_E) - S(1 - zl-E)W(zl-E)
= 1 - E + (yl- E - zl-E )w(zl _E) - S(1 - zi- E )Azl -E)
which combined with S = -EY3/6 leads to
q^ 1Y1 -E = z1-E + S(zi_E - 1)EY3.
Using Y = (A - EA ) / Var(A), this yields the NP approximation
a1_E = EA + z1_E(Var (A))1/2 + 16(Z1 _E - 1) E (A - EA)3
Var(A)
Under the Poisson assumption (4.1), the kth cumulant of A is /3PBk' and
so s;k = /3µB^1 / (,6pBki) d/2. In particular , k3 is small for large /3 but dominates1c4, K5 .... as required . We can rewrite (4.7) as
1 (3)
a1-E = Qµa +z1 -E(/3PB^1 )1^2 + s(z1-E - 1)^ )2µ'E
Notes and references We have followed largely Sundt [354]. Another main ref-
erence is Daykin et at. [101]. Note, however, that [101] distinguishes between the NP
and Edgeworth approximations.
4c Panjer 's recursion
Consider A = EN 1 U%, let pn = P(N = n), and assume that there existconstants a, b such that
Pn = (a+ ) Pn_i , n = 1, 21 ....n
For example, this holds with a = 0, b = /3 for the Poisson distribution with rate/3 since
^e-Q ,3n-i /3Pn = -Pn-1
n! n (n - 1)! n

4. THE DISTRIBUTION OF THE AGGREGATE CLAIMS 321
Proposition 4.4 Assume that B is concentrated on {0, 1, 2,.. .} and write gj =2 , . . fj = P(A = j), j = 0,1..... Then fo = >20 9onpn and
f i = 1 E (a + b!) gkfj- k , j = 1, 2, ... .1-ag k_1 3
In particular, if go = 0, then
(4.10)
j
f o = po, fj = E (a+ b )9kfi_k , j = 1, 2..... (4.11)k=1
Remark 4.5 The crux of Proposition 4.4 is that the algorithm is much fasterthan the naive method, which would consist in noting that (in the case go = 0)
fj = pn9jnn=1
(4.12)
where g*n is the nth convolution power of g, and calculating the gj*n recursively
by 9*1 = 9j,j-1
g; n = 9k(n-1 )9j -k • (4.13)k=n-1
Namely, the complexity (number of arithmetic operations required) is O(j3) for(4.12), (4.13) but only O(j2) for Proposition 4.4. q
Proof of Proposition 4.4. The expression for fo is obvious. By symmetry,
E[a +bU=I >Ui =jl
(4.14)i=1 J
is independent of i = 1, . . . , n. Since the sum over i is na + b , the value of (4.14)is therefore a + b/n. Hence by (4.9), (4.12) we get for j > 0 that
fj - a +
bn p
n-lgj*n
n
00 U1
I n
= E a+b- Ui=j pn-19j*n
n=1 j i=1
CC) n
Ul Ui =j pn_1EEIa
+bn=1 i=1

322 CHAPTER XI. MISCELLANEOUS TOPICS
00 J
EE (a + bk I gkg3 _ k lien-in=ik=0
(a+bk l gkE gj'`kpn = E (a+b!)9kfi_k
k=0 ^I n=0 k=0
1agofj+ kE(a+b. Jgkfj-k,
k=i /
andand (4 .9) follows . (4.11) is a trivial special case. q
If the distribution B of the Ui is non-lattice , it is natural to use a dis-
crete approximation . To this end, let U(;+, U(h) be U; rounded upwards, resp.
downwards , to the nearest multiple of h and let A}h) = EN U. An obvious
modification of Proposition 4.4 applies to evaluate the distribution F(h) of A(h)
letting f() = P(A() = jh) and
g(h)
gkh+
= P (U(h2 = kh) = B((k + 1)h) - B(kh ), k = 0, 1, 2, ... ,
= P (U4;+ = kh) = B(kh) - B ((k - 1)h) = gk- l,-, k = 1, 2, ... .
Then the error on the tail probabilities (which can be taken arbitrarily small bychoosing h small enough ) can be evaluated by
00 00f! h) < P(A > x) f (h)
j=Lx/hl j=Lx/hl
Further examples (and in fact the only ones , cf. Sundt & Jewell [355]) where(4.9) holds are the binomial distribution and the negative binomial (in partic-ular, geometric ) distribution . The geometric case is of particular importancebecause of the following result which immediately follows from by combiningProposition 4.4 and the Pollaczeck-Khinchine representation:
Corollary 4.6 Consider a compound Poisson risk process with Poisson rate 0and claim size distribution B. Then for any h > 0, the ruin probability zb(u)satisfies
00 00
f^,h) Cu) < E ff,+, (4.15)
j=Lu/hJ j=Lu/hJ

5. PRINCIPLES FOR PREMIUM CALCULATION 323
where f^ +, f^ h) are given by the recursions
3(h) (h) (h)
fj,+ = P 9k fj-k,+ ' I = 17 2, .. .k=1
3(h) = P (h) (h)
f9,- - (h) gk,-fA-k,- e j = 1+2,1 - ago,- k=1
starting from fo + = 1 - p, f(h)07 = (1 - p)/(1 - pgoh-) and using
g(kh) =
gkh+
1 (k+1)h
Bo((k + 1 ) h) - Bo(kh) = - f B(x) dx,AB kh
Bo(kh) - Bo((k - 1 ) h) = 9kh)1 , k = 1,2 .....
k = 0, 1, 2, ... ,
Notes and references The literature on recursive algorithms related to Panjer's
recursion is extensive, see e.g. Dickson [115] and references therein.
5 Principles for premium calculation
The standard setting for discussing premium calculation in the actuarial litera-ture does not involve stochastic processes, but only a single risk X > 0. By thiswe mean that X is a r.v. representing the random payment to be made (possibly0). A premium rule is then a [0, oo)-valued function H of the distribution of X,often written H(X), such that H(X) is the premium to be paid, i.e. the amountfor which the company is willing to insure the given risk.
The standard premium rules discussed in the literature (not necessarily thesame which are used in practice!) are the following:
The net premium principle H(X) = EX (also called the equivalence prin-ciple). As follows from the fluctuation theory of r.v.'s with mean, thisprinciple will lead to ruin if many independent risks are insured. Thismotivates the next principle,
The expected value principle H(X) = (1 + 77)EX where 77 is a specifiedsafety loading. For 77 = 0, we are back to the net premium principle.A criticism of the expected value principle is that it does not take intoaccount the variability of X which leads to
The variance principle H(X) = EX+77Var(X). A modification (motivatedfrom EX and Var(X) not having the same dimension) is

324 CHAPTER XI. MISCELLANEOUS TOPICS
The standard deviation principle H(X) = EX +rl Var(X).
The principle of zero utility. Here v(x) is a given utility function, assumedto be concave and increasing with (w.lo.g) v(O) = 0; v(x) represents theutility of a capital of size x . The zero utility principle then means
v(0) = Ev(H(X) - X); (5.1)
a generalization v(u) = Ev(u + H(X) - X ) takes into account the initialreserve u of the company.
By Jensen 's inequality, v(H(X) - EX) > Ev(H(X) - X) = 0 so thatH(X) > EX. For v(x) = x, we have equality and are back to the netpremium principle . There is also an approximate argument leading to thevariance principle as follows . Assuming that the Taylor approximation
v(H(X) - X) ^ 0 +v'(0)(H (X) - X) + v,/
0 (H(X) - X)22
is reasonable , taking expectations leads to the quadratic
v"H(X )2 + H(X) (2v' - 2v"EX) + v"EX2 - 2v'EX = 0
(with v', v" evaluated at 0) with solution
H(X)=EX-v^±V(- ^ )2-Var(X).
Write
\( vI ) 2-Var(X) v^ - 2v^Var(X)/ I - ( , Var(X))2
If v"/v' is small, we can ignore the last term. Taking +f then yields
H(X) ,:: EX -2v'(0) VarX;
since v"(0) < 0 by concavity, this is approximately the variance principle.
The most important special case of the principle of zero utility is
The exponential principle which corresponds to v(x) = (1 - e-6x)/a forsome a > 0. Here (5.1) is equivalent to 0 = 1 - e-0H(X)EeaX, and we get
H(X) = 1 log Ee0X .a

5. PRINCIPLES FOR PREMIUM CALCULATION 325
Since m.g.f.'s are log-concave, it follows that H,, (X) = H(X) is increasingas function of a. Further, limQyo Ha (X) = EX (the net premium princi-
ple) and, provided b = ess supX < oo, lim,, Ha (X) = b (the premium
principle H(X) = b is called the maximal loss principle but is clearly not
very realistic). In view of this, a is called the risk aversion
The percentile principle Here one chooses a (small ) number a, say 0.05 or
0.01, and determines H(X) by P(X < H(X)) = 1 - a (assuming a con-
tinuous distribution for simplicity).
Some standard criteria for evaluating the merits of premium rules are
1. 77 > 0, i .e. H(X) > EX.
2. H(X) < b when b (the ess sup above ) is finite
3. H(X + c) = H(X) + c for any constant c
4. H(X + Y) = H(X) + H(Y) when X, Y are independent
5. H(X) = H(H(XIY)). For example , if X = EN U= is a random sum withthe U; independent of N, this yields
H C^ U; I = H(H(U)N)
(where, of course, H(U) is a constant).
Note that H(cX) = cH(X) is not on the list! Considering the examples above,the net premium principle and the exponential principle can be seen to the onlyones satisfying all five properties. The expected value principle fails to satisy,e.g., 3), whereas (at least) 4) is violated for the variance principle, the standarddeviation principle, and the zero utility principle (unless it is the exponential ornet premium principle). For more detail, see e.g. Gerber [157] or Sundt [354].
Proposition 5.1 Consider the compound Poisson case and assume that thepremium p is calculated using the exponential principle with time horizon h > 0.
That is,N,,
Ev I P - E U; = 0 where v(x) =a1(1 - e-°x
i=1
Then ry = a, i.e. the adjustment coefficient 'y coincides with the risk aversion a.

326 CHAPTER XI. MISCELLANEOUS TOPICS
Proof The assumption means
0 a (1 - e-areo (B[a1-1)l
i.e. /3(B[a] - 1) - ap = 0 which is the same as saying that a solves the Lundberg
equation. q
Notes and references The theory exposed is standard and can be found in many
texts on insurance mathematics, e.g. Gerber [157], Heilman [191] and Sundt [354]. For
an extensive treatment, see Goovaerts et al. [165].
6 Reinsurance
Reinsurance means that the company (the cedent) insures a part of the risk atanother insurance company (the reinsurer).
Again, we start by formulation the basic concepts within the framework ofa single risk X _> 0. A reinsurance arrangement is then defined in terms of afunction h(x) with the property h(x) < x. Here h(x) is the amount of the claimx to be paid by the reinsurer and x - h(x) by the the amount to be paid by thecedent. The function x - h(x) is referred to as the retention function. The mostcommon examples are the following two:
Proportional reinsurance h(x) = Ox for some 0 E (0, 1). Also called quotashare reinsurance.
Stop-loss reinsurance h(x) = (x - b)+ for some b E (0, oo), referred to as theretention limit. Note that the retention function is x A b.
Concerning terminology, note that in the actuarial literature the stop-loss trans-form of F(x) = P(X < x) (or, equivalently, of X), is defined as the function
b -* E(X - b)+ = f (s - b)F(dx) _ f00
(x) dx.6
An arrangement closely related to stop-loss reinsurance is excess-of-loss rein-surance , see below.
Stop-loss reinsurance and excess-of-loss reinsurance have a number of niceoptimality properties. The first we prove is in terms of maximal utility:
Proposition 6.1 Let X be a given risk, v a given concave non-decreasing utilityfunction and h a given retention function. Let further b be determined by E(X -b)+ = Eh(X). Then for any x,
Ev(x - {X - h(X)}) < Ev(x - X A b).

6. REINSURANCE 327
Remark 6 .2 Proposition 6.1 can be interpreted as follows. Assume that thecedent charges a premium P > EX for the risk X and is willing to pay P1 < Pfor reinsurance. If the reinsurer applies the expected value principle with safetyloading q, this implies that the cedent is looking for retention functions withEh(X) = P2 = P1/(1 + 77). The expected utility after settling the risk is thus
Ev(u + P - P1 - {X - h(X)})
where u is the initial reserve . Letting x = u + P - P1, Proposition 6.1 showsthat the stop-loss rule h(X) = (X - b)+ with b chosen such that E(X - b)+= P2 maximizes the expected utility. q
For the proof of Proposition 6.1, we shall need the following lemma:
Lemma 6 .3 (OHLIN'S LEMMA) Let X1, X2 be two risks with the same mean,
such thatFj(x) < F2 (x), x < b, Fi(x) ? F2(x), x > b
for some b where Fi(x) = P(Xi < x). Then Eg(X1) < g(X2) for any convexfunction g.
Proof LetYi=XiAb, Zi=Xivb.
ThenP(Yl < x) _ Fi(x) <_ F2 (x) = P(Y2 < x) x < b
1=P(Y2<x) x>b
so that Y1 is larger than Y2 in the sense of stochastical ordering . Similarly,
P(Zl < x) _0 = P(Z2 < x) x < b
Fi(x) > F2(x) = P(Z2 < x) x > b
so that Z2 is larger than Zl in stochastical ordering. Since by convexity,
v(x) = g(x) - g(b) - g'(b)(x - b)
is non-increasing on [0, b] and non-decreasing on [b, oo), it follows that Ev(Y1) <
Ev(Y2), Ev(Zi) < Ev(Z2). Using v(Yi) + v(Zi) = v(Xi), it follows that
0 < Ev(X2) - Ev(Xi) = Eg(X2) - Eg(X1),
using EX1 = EX2 in the last step. q
Proof of Proposition 6.1. It is easily seen that the asssumptions of Ohlin' s lemmahold when X1 = X A b, X2 = X - h(X); in particular, the requirement EX1

328 CHAPTER XI. MISCELLANEOUS TOPICS
= EX2 is then equivalent to E(X - b)+ = Eh(X). Now just note that -v isconvex. q
We now turn to the case where the risk can be written as
N
X = Uii=1
with the Ui independent; N may be random but should then be independent ofthe Ui. Typically, N could be the number of claims in a given period, say a year,and the Ui the corresponding claim sizes. A reinsurance arrangement of the formh(X) as above is called global; if instead h is applied to the individual claims so
that the reinsurer pays the amount EN h(Ui), the arrangement is called local
(more generally, one could consider EN hi(Ui) but we shall not discuss this).The following discussion will focus on maximizing the adjustment coefficient.
For a global rule with retention function h* (x) and a given premium P* chargedfor X - h* (X), the cedents adjustment coefficient -y* is determined by
1 = Eexp {ry*[X - h*(X) - P*]}, (6.2)
for a local rule corresponding to h(u ) and premium P for X -look instead for the ry solving
N 1 h (Ui), we
1 = EexpJ _f
Ei - h(Ui)] -P = Eexp{ry[X_P_^
h(Ui)]J }[ [U
l (6.3)This definition of the adjustment coefficients is motivated by considering ruinat a sequence of equally spaced time points, say consecutive years, such that Nis the generic number of claims in a year and P, P* the total premiums chargedin a year, and referring to the results of V.3a. The following result shows thatif we compare only arrangements with P = P*, a global rule if preferable to alocal one.
Proposition 6.4 To any local rule with retention function h(u) and any
N
P > E X - N h(Ui) (6.4)4=1
there is a global rule with retention function h* (x) such that
N
Eh*(X) = Eh(U1)i=1
and 'y* > ry where ry* is evaluated with P* = P in (6.3).

6. REINSURANCE 329
Proof DefineN
h* (x) = E > h(Ui) X = x ;
then (6.5) holds trivially. Applying the inequality Ecp(Y) > EW(E (YIX )) (with
W convex ) to W(y) = eryy, y = Ei [Ui - h(Ui)] - P, we get
N
1 = Eexp ry E[Ui - h(Ui)] - P > EexP{7[X - h* (X) - P]}.i-i
But since ry > 0, ry* > 0 because of (6.4), this implies 7* > 7. q
Remark 6.5 Because of the independence assumptions , expectations like thosein (6.3), (6.4), (6.5) reduce quite a lot. Assuming for simplicity that the Ui arei.i.d., we get EX = EN • EU,
N
E X - h(UU) = EN • E[U - h(U)],
Eexp 7 [E' [Ui - h(Ui)] - P I = EC [7]N, (6.6)i-i
where C[ry] = Ee'r(u-4(u)), and so on. q
The arrangement used in practice is, however , as often local as global. Localreinsurance with h(u) = (u - b)+ is referred to as excess-of-loss reinsurance andplays a particular role:
Proposition 6.6 Assume the Ui are i. i.d. Then for any local retention functionu - h(u) and any P satisfying (6.4), the excess-of-loss rule hl (u) = (u - b)+with b determined by
E(U - b)+ = Eh(U)
(and the same P) satisfies 71 > ry.
Proof As in the proof of Proposition 6.4, it suffices to show that
Eexp{ry
'UiAb- P] } < 1 = Eexp{ry
E[Ui- h(Ui)-Pi-i JJJ l:='l
or, appealing to (6.6), that 01[ry] < 0[-y] where 0[-y] = Ee'r(U^') . This followsby taking Xl = U A b, X2 = U - h(U) (as in the proof of Proposition 6.4) andg(x) = e7x in Ohlin's lemma. q

330 CHAPTER XI. MISCELLANEOUS TOPICS
Notes and references The theory exposed is standard and can be found in.many
texts on insurance mathematics, e.g. Bowers et at. [76], Heilman [191] and Sundt [354].
See further Hesselager [194] and Dickson & Waters [120].
The original reference for Ohlin's lemma is Ohlin [277]. The present proof is from
van Dawen [99]; see also Sundt [354].

Appendix
Al Renewal theory
la Renewal processes and the renewal theorem
By a simple point process on the line we understand a random collection oftime epochs without accumulation points and without multiple points. Themathematical representation is either the ordered set 0 < To < T1 < ... ofepochs or the set Y1, Y2, ... of interarrival times and the time Yo = To of thefirst arrival (that is, Y,, = T„ - T„_1). The point process is called a renewalprocess if Yo, Y1, ... are independent and Y1, Y2, ... all have the same distribution,denoted by F in the following and referred to as the interarrival distribution;the distribution of Yo is called the delay distribution. If Yo = 0, the renewalprocess is called zero-delayed. The number max k : Tk_j < t of renewals in [0, t]is denoted by Nt.
The associated renewal measure U is defined by U = u F*" where F*"is the nth convolution power of F. That is, U(A) is the expected number ofrenewals in A C R in a zero-delayed renewal process; note in particular thatU({0}) = 1.
The renewal theorem asserts that U(dt) is close to dt/µ, Lebesgue measuredt normalized by the mean to of F, when t is large . Technically, some conditionis needed: that F is non-lattice, i.e. not concentrated on {h, 2h,.. .} for anyh > 0. Then Blackwell 's renewal theorem holds, stating that
U(t+a)-U (t) -^ a, t -00 (A.1)
(here U(t) = U([0, t]) so that U(t + a) - U(t) is the expected number of renewalsin (t, t +a]). If F satisfies the stronger condition of being spread-out (F*' is non-singular w .r.t. Lebesgue measure for some n > 1), then Stone 's decompositionholds : U = U, + U2 where U1 is a finite measure and U2(dt) = u(t)dt where
331

332 APPENDIX
u(t) has limit 1/µ as t -4 oo. Note in particular that F is spread-out if F has
a density f.A weaker (and much easier to prove) statement than Blackwell's renewal
theorem is the elementary renewal theorem, stating that U(t)/t --> 1/p. Bothresult are valid for delayed renewal processes, the statements being
EN(t + a) - EN(t) - a, resp. ENt -4 1
lb Renewal equations and the key renewal theorem
The renewal equation is the convolution equation
Z(u) = z(u) +f
U Z(u - x)F(dx), (A.2)
where Z(u) is an unknown function of u E [0 , oo), z(u) a known function, andF(dx) a known probability measure . Equivalently, in convolution notation Z =z + F * Z. Under weak regularity conditions (see [APQJ Ch. IV), (A.2) has the
unique solution Z = U * z, i.e.
Z(u) = J u z(x)U(dx). (A.3)0
Further, the asymptotic behavior of Z(u ) is given by the key renewal theorem:
Proposition A1.1 if F is non-lattice and z (u) is directly Riemann integrable(d.R.i.; see [APQ] Ch. IV), then
Z(u) -i f0 z(x)dx . (A.4)µF
If F is spread-out, then it suffices for (A.4) that z is Lebesgue integrable with
limZ.i". z(x) = 0.
In 111.9, wee shall need the following less standard parallel to the key renewaltheorem:
Proposition A1.2 Assume that Z solves the renewal equation (A.2), that z(u)
has a limit z(oo) (say) as u -4 oo, and that F has a bounded density2. Then
Z(u) -4 z(oo), u-4 00. (A.5)
u PF
2This condition can be weakened considerably , but suffices for the present purposes

APPENDIX 333
Proof The condition on F implies that U(dx) has a bounded density u(x) withlimit 1/µF as x -* oo. Hence by dominated convergence,
Z(u)=
1 u 1d 1 d
Uu f z(u - x)u(x) x = J0 0
z(u( - t))u(ut) t
f z(oo) • 1dt = z(OO).0 PF µF
11
In risk theory, a basic reason that renewal theory is relevant is the renewalequation II.(3.3) satisfied by the ruin probability for the compound Poissonmodel. Here the relevant F does not have mass one (F is defective). However,asymptotic properties can easily be obtained from the key renewal equation byan exponential transformation also when F(dx) does not integrate to one. Tothis end, multiply (A.2) by e7x to obtain Z = z +P * Z where Z(x) = e'Y'Z(x),z(x) = e7xz(x), F(dx) = e7xF(dx). Assuming that y can be chosen such thatf °° Ox F(dx) = 1, i.e. that F is a probability measure, results from the case
fo F(dx) = 1 can then be used to study Z and thereby Z. This program hasbeen carried out in III.5a. Note, however, that the existence of y may fail forheavy-tailed F.
1c Regenerative processes
Let {T,,} be a renewal process. A stochastic process {Xt}t>0 with a generalstate space E is called regenerative w.r.t. {Tn} if for any k, the post-Tk process{XT,k+t }t>o is independent of To, T1,. .. , Tk (or, equivalently, of Yo, Y1 , . . • , Yk ),and its distribution does not depend on k. The distribution F of Y1, Y2.... iscalled the cycle length distribution and as before, we let µ denote its mean. Welet FO, Eo etc. refer to the zero-delayed case.
The simplest case is when {Xt} has i.i.d. cycles. The kth cycle is definedas {XTk+t}o<t<Yk ,; this expression is to be interpreted as a random elementof the space of all E-valued sequences with finite lifelengths. The propertyof independent cycles is equivalent to the post-Tk process {XTk+t}t>0 beingindependent of To, T1, ... , Tk and {Xt }o<t<Tk • For example, this covers discreteMarkov chains where we can take the Tn as the instants with Xt = i for somearbitrary but fixed state i, or many queueing processes, where the Tn are theinstants where a customer enters an empty system (then cycles = busy cycles).However, the present more general definition is needed to deal with say Harrisrecurrent Markov chains.
A regenerative process converges in distribution under very mild conditions:

334 APPENDIX
Proposition A1.3 Consider a regenerative process such that the cycle length
distribution is non-lattice with p < oo. Then Xt -Di X,,,, where the distribution
of X,,,, is given by
Eg(Xoo) = 1E0 f Ylg(Xt)dt.µ 0
If F is spread-out, then Xt -+ X,, in total variation.
(A.6)
id Cumulative processes
Let {Tn} be a renewal process with i.i.d. cycles (we allow a different distribution
of the first cycle). Then {Zt}t^,0 is called cumulative w.r.t. {Tn} if the processes
{ZT +t - ZT }0<t<Y„+,
are i.i.d. for n = 1, 2,.... An example is Zt = fo f (X8) ds where {Xt} is
regenerative w.r.t. {Tn}. This is the case considered in [APQ] V.3, but in fact,just the same proof as there carries over to show:
Proposition A1.4 Let {Zt}t^,0 be cumulative w.r.t. {Tn}, assume that p < 00
and define Un = ZT}1 - ZT Then:(a) If
E sup I ZTo+t - ZTOI < 00,0<t<Yi
then Zt /t a$• EU1/µ;(b) If in addition Var(Ul ) < oo, then (Zt - tEU1/µ)/f has a limiting normal
distribution with mean 0 and variance
Var(Ui) + (!)2Var(Yi)_ 2EU1 Cov(U1, Y1)
le Residual and past lifetime
Consider a renewal process and define e (t) as the residual lifetime of the re-
newal interval straddling t, i.e. fi (t) = inf {Tk - t : t < Tk}, and q(t) =
sup It - Tk : t < Tk} as the age. Then {e(t)}, {i7(t)} are Markov with state
spaces (0, oo), resp . [0, oo). If p = oo, then e (t) - oo (i.e. P(C (t) < a) -4 0
for any a < oo) and ij(t) * oo. Otherwise , under the condition of Blackwell's
renewal theorem, C(t) and ij (t) both have a limiting stationary distribution F0
given by the density F (x)/p. We denote the limiting r.v.'s by e, r,. Then it
holds more generally that (rl(t), e(t)) (ii, C), and we have:

APPENDIX 335
Theorem A1.5 Under the condition of Blackwell's renewal theorem, the jointdistribution of (rl, ^) is given by the following four equivalent statements:
(a) P (77 > x, ^ > y) = 1 f (z)dz;+Y
(b) the joint distribution of (ri, l:) is the same as the distribution of (VW, (1 -V)W) where V, W are independent, V is uniform on (0, 1) and W has distribu-tion Fw given by dFw/dF(x) = x/pF;(c) the marginal distribution of q is FO, and the conditional distribution of
given 17 = y is the overshoot distribution R0(Y) given by FO(Y) (z) = Fo (y+z)/Fo(y);(d) the marginal distribution of ^ is FO, and the conditional distribution of ri
given l; = z is Foz)
The proof of (a) is straightforward by viewing {(r,(t),^(t))} as a regenerativeprocess, and the equivalence of (a) with (b)-(d) is an easy exercise.
In IV.4, we used:
Proposition A1.6 Consider a renewal process with µ < oo. Then fi(t)/t a4' 0and, if in addition EYo < oo, EC(t)/t -+ 0.
Proof The number Nt of renewal before t satisfies Nt/t a4' p. Hence for tlarge enough, we can bound e(t) by M(t) = max {Yk : k < 2t/p}. Since the
maximum Mn of n i.i.d. r.v.'s with finite mean satisfies Mn/n a$• 0 (Borel-Cantelli), the first statement follows. For the second, assume first the renewalprocess is zero-delayed. Then Eo^(t) satisfies a renewal equation with z(t) _E[Y1 - t; Yl > t]. Hence
t t ltEoe(t) = f U(dy)z(t - y) = f U(t - dy)z(y) < c ^ l z(k)0 0 k=o
where c = sup., U(x + 1) - U(x) (c < oo because it is easily seen that U(x +1) - U(x) < U( 1)). Since z (k) < E[Yi ; Y1 > t] -4 0, the sum is o(t) so thatEo£(t)/t -+ 0 . In the general case, use
tE^(t)/t = E[Yo - t; Yo > 0] + f Eo^(t - y)P(Yo E dy) .
0
If Markov renewal theory
By a Markov renewal process we understand a point process where the interar-rival times Yo , Y1i Y2, ... are not i.i.d. but governed by a Markov chain {Jn} (we

336 APPENDIX
assume here that /the state space E is// finite) in the sense that
P(Y. < yIJ) = Fij(y) on {Jn= i, Jn+1=j}
where J = a(JO, J1 i ...) and (Fij )i,jEE is a family of distributions on (0, oo).
A stochastic process {Xt}t>o is called semi-regenerative w.r.t. the Markov re-
newal process if for any n, the conditional distribution of {XT„+t}t>o given
Yo, Y1, . . . , Yn, Jo, . . . , Jn_1, Jn = i is the same as the P; distribution ofjXt}t>o
itself where Pi refers to the case Jo = i.A Markov renewal process {Tn} contains an imbedded renewal process,
namely {Twk } where {Wk } is the sequence of instants w where Jo., = io for
some arbitrary but fixed reference state io E E. The semi-regenerative processis then regenerative w.r.t. IT,,,,}. These facts allow many definitions and resultsto be reduced to ordinary renewal- and regenerative processes. For example,the semi-regenerative process is called non-lattice if {T,,,,} is non-lattice (it iseasily seen that this definition does not depend on i). Further:
Proposition A1.7 Consider a non-lattice semi-regenerative process. Assume
that uj = EjYo < oo for all j and that {J„} is irreducible with stationary
distribution (v3)jEE. Then Xt 4 Xo,, where the distribution of X,,. is given by
YOEg(X00) = 1 vjEj f g(Xt) dt
µ jEE o
where p = ujEEViAj.
Notes and references Renewal theory and regenerative processes are treated,
e.g., in [APQ], Alsmeyer [5] and Thorisson [372].
A2 Wiener-Hopf factorization
Let F be a distribution which is not concentrated on (-oo, 0] or (0 , oo). Let
X1, X2, ... be i.i .d. with common distribution F, Sn = X1 + • • • + Xn the
associated random walk, and define
r+=inf{n>0: Sn>0}, T_=inf{n>0: Sn<0},
G+(x) = P(S,+ < x, -r+ < oo), G_(x) = P(ST_ < x,T_ < oo).
We call r+ (T_) the strict ascending (weak descending) ladder epoch and G+(G_) the corresponding ladder height distributions.

APPENDIX 337
Probabilistic Wiener-Hopf theory deals with the relation between F, G+,G_, the renewal measures
00 00U+=>G+, U- =EGn,
n=0 n=0
and the T+- and r_ pre-occupation measures
T+-1 r_-1
R+(A) = E E I(Sn E A), R_(A) = E I(Sn E A).n-0 n=0
The basic identities are the following:
Theorem A2.1 (a) F = G+ + G_ - G+ * G_:(b) G_ (A) = f °° F(A - x)R_ (dx), A C (-oo, 0);
(c) G+(A) = f °. F(A - x)R+(dx), A C (0, oo);(d) R+ = U_; (e) R_ = U+.
Proof Considering the restrictions of measures to (-oc, 0] and (0, oo), we mayrewrite (a) as
G_ (A) = F(A) + (G+ * G_)(A), A C (-oo, 0], (A.7)
G+(A) = F(A) + (G+ * G_)(A), A C (0, oo) (A.8)
(e.g. (A.7) follows since G+(A) = 0 when A C (-oo, 0]). In (A.7), F(A) is thecontribution from the event {T_ = 1} = {X1 < 0}. On {T_ > 2}, define w as thetime where the pre-T_ path S1, ... , Sr_ _1 is at its minimum . More rigorously,we consider the last such time (to make w unique) so that
{w=m,T_=n} = {S,-S.. >0, 0<j<m, S,-S.>0, m<j<n}.
u
,r- =nw=m
i
Figure A.1

3 8 APPENDIX
Reversing the time points 0,1, ... , m it follows (see Fig . A.1) that
P(Sj -Sn,.>0, 0<j<m, SmEdu) = P(T+=m, ST+Edu).
Aso, clearly
(Sj -Sm>0, m < j <n, SnEAIS,,, E du) = P(T_=n-m, Sr_ E A-du)
(s ee again Fig . A.1). It follows that for n > 2
F (7-- = n, S,_ E A)n-1
m=1
f P(r_=nw=m Sm EduSrEA)
n-1
m=1 fF(r+=mSr+Edu).F(r_n_mSrEA_u).
S mming over n = 2,3.... and reversing the order of summation yields
P(T_ > 2, ST_ E A)
P(T+ = m, S,+ E du) E P(S,_ = n - m, ST_ E A - u)f0m 00m=1 n=m+1
J OO P(S,+ E du)P(S,_ E A - du)0
(G+ * G-)(A)•
C llecting terms, (A.7) follows, and the proof of (A.8) is similar.
(b) follows from
00
G+ (A) _ E F(Sn E A, -r+ = n)n=1
00 C-0E fF(Sk< 0,0<k<ri ,Sn_1Edx,XnEA-x)n=1 0 -
00001: F(A - x)P(Sk < 0, 0 < k < n , Sn-1 E dx)
0 n=1 -f
f0F(A - x)R+(dx),

APPENDIX 339
and the proof of (c) is similar. For (d), consider a fixed n and let Xk = Xn_k+l,Sk = X1 + • • • + Xk = Sn - Sn_k. Then for A C (-oo, 0],
P(SnEA ,T+> n) = P(Sk < O,O<k<n,SnEA)
= P(SnSn_k,0<k<n,SnEA)
= P(Sn<Sk,0<k<n,SnEA)
= P(Sn<Sk,O<k<n,SnEA)
is the probability that n is a weak descending ladder point with Sn E A. Sum-ming over n yields R+ (A) = U_ (A), and the proof of (e) is similar. q
Remark A2.2 In terms of m.g.f.'s, we can rewrite (a) as
1 - F[s] = (1 - 0+[s])(1 - G_[s]) (A.9)
whenever F[s], 6+ [s], G_ [s] are defined at the same time; this holds always onthe line its = 0, and sometimes in a larger strip. Since G+ is concentrated on(0, oo), H+ (s) = 1-G+[s] is defined and bounded in the half-plane Is : ERs < 0}and non-zero in Is: Rs < 01 (because IIG+lI _< 1), and similarly H_ (s) =1 - G_ [s] is defined and bounded in the half-plane is : ERs > 01 and non-zeroin Is : ERs > 0}. The classical analytical form of the Wiener-Hopf problem is towrite 1 -.P as a product H+H_ of functions with such properties. q
Notes and references In its above discrete time version, Wiener-Hopf theory isonly used at a few places in this book. However, it serves as model and motivationfor a number of results and arguments in continuous time. E.g., the derivation of theform of G+ for the compound Poisson model (Theorem 11.6.1), which is basic for thePollaczeck-Khinchine formula, is based upon representing G+ as in (b), and usingtime-reversion as in (d) to obtain the explicit form of R+ (Lebesgue measure).
In continuous time, the analogue of a random walk is a process with stationaryindependent increments (a Levy process, cf. 11.4). In this generality of, there is nodirect analogue of Theorem A2.1. For example, if {St} is Brownian motion, then
T+ = inf It > 0 : St = 0} is 0 a.s., and G+, G_ are trivial, being concentrated at 0.Nevertheless, a number of related identities can be derived; see for example Bingham[65].
Another main extension of the theory deals with Markov dependence. In discretetime, there are direct analogues of Theorem A2.1; see e.g. the survey [15] by the
author and the extensive list of references there. Again, such developments motivatethe approach in Chapter VI on the Markovian environment model.
The present proof of Theorem A2.1(a) is from Kennedy [228].

340 APPENDIX
3 Matrix-exponentials
T e exponential eA of a p x p matrix A is defined by the usual series expansion
00 AneA
n!n=0
he series is always convergent because A' = O(nk Ialn) for some integer k < p,ere A is the eigenvalue of largest absolute value, JAI = max {Jjt : µ E sp(A)}
and sp(A) is the set of all eigenvalues of A (the spectrum).Some fundamental properties are the following:
sp(eA) = {e' : A E sp(A)} (A.10)
ddteAt = AeAt = eAtA (A.11)
A f eAtdt = eA, _I (A.12)0
eA-'AO = A-le AA (A.13)
henever A is a diagonal matrix with all diagonal elements non-zero.
It is seen from Theorem VIII.1.5 that when handling phase-type distribu-
ti ons, one needs to compute matrix-inverses Q-1 and matrix-exponentials eQt
( r just eQ ). Here it is standard to compute matrix-inverses by Gauss-Jordan
e l imination with full pivoting , whereas there is no similar single established
a proach in the case of matrix-exponentials . Here are , however , three of the
c rrently most widely used ones:
xample A3.1 (SCALING AND SQUARING) The difficulty in directly applying
t e series expansion eQ = Eo Q"/n! arises when the elements of Q are large.
hen the elements of Q"/n! do not decrease very rapidly to zero and may
contribute a non-negligible amount to eQ even when n is quite large and very
any terms of the series may be needed (one may even experience floating point
overflow when computing Qn). To circumvent this, write eQ = (eK)m where
= Q/m for some suitable integer m (this is the scaling step). Thus, if m is
s fficiently large, Eo Kn/n! converges rapidly and can be evaluated withoutp oblems, and eQ can then be computed as the mth power (by squaring if= 2). 0

APPENDIX 341
Example A3.2 (UNIFORMIZATION) Formally, the procedure consists in choos-
ing some suitable i > 0, letting P = I + Q/i and truncating the series in the
identity
= e-17t 00 Pn(,]t)n (A.14)E nn=0
which is easily seen to be valid as a consequence of eqt = en(P-r)t = e-ntenpt
The idea which lies behind is uniformization of a Markov process {Xt}, i.e.construction of {Xt} by realizing the jump times as a thinning of a Poissonprocess {Nt } with constant intensity 77. To this end, assume that Q is theintensity matrix for {Xt} and choose q with
rt > max J%J = max -qii•1,3 i
(A.15)
Then it is easily checked that P is a transition matrix , and we may consider
a new Markov process {Xt} which has jumps governed by P and occuring at
epochs of {Nt} only (note that since pii is typically non-zero , some jumps aredummy in the sense that no state transition occurs ). However , the intensitymatrix Q is the same as the one Q for {Xt} since a jump from i to j 1-1 i occursat rate qij = 77pij = q22. The probabilistic reason that (A.14) holds is therefore
that the t-step transition matrix for {fft} is
°O
PneQt = E e-nt (,7t)n
n!n=0
(to see this, condition upon the number n of Poisson events in [Olt]) - q
Example A3.3 (DIFFERENTIAL EQUATIONS) Letting Kt = eQt, we have k =
QK (or KQ) which is a system of p2 linear differential equations which can
be solved numerically by standard algorithms (say the Runge-Kutta method)
subject to the boundary condition Ko = I.
In practice, what is needed is quite often only Zt = TreQt (or eQth) with it(h) a given row (column) vector. One then can reduce to p linear differentialequations by noting that k = ZQ, Zo = a (Z = QZ, Zo = h).
The approach is in particular convenient if one wants eQt for many differentvalues of t. q
Here is a further method which appears quite appealing at a first sight:
Example A3 .4 (DIAGONALIZATION) Assume that Q has diagonal form, i.e.p different eigenvalues Aj i ... , Ap. Let vi,... , vp be the corresponding left

342 APPENDIX
(row) eigenvectors and hl,..., hp the corresponding right (column) eigenvec-tors, v5Q = Aivi, Qhi = vihi. Then vihj = 0, i # j, and vihi ¢ 0, and wemay adapt some normalization convention ensuring vihi = 1. Then
P P
Q = > Aihivi = E Aihi (9 vi, (A.16)i=1 i= 1
P P
eQt = E e\`thivi = E ea:thi ® vi. (A.17)i=1 i=1
Thus, we have an explicit formula for eQt once the A j, vi, hi have been computed;this last step is equivalent to finding a matrix H such that H-1QH is a diagonalmatrix, say A = (Ai)diag, and writing eQt as
eQt = He°tH-1 = H (e\it)di.g H-1. (A.18)
Namely, we can take H as the matrix with columns hl,..., hp. q
There are, however, two serious drawbacks of this approach:
Numerical instability : If the A5 are too close, (A.18) contains terms whichalmost cancel and the loss of digits may be disasterous. The phenomenonoccurs not least when the dimension p is large. In view of this phenomenonalone care should be taken when using diagonalization as a general tool for
computing matrix-exponentials.
Complex calculus : Typically, not all ai are real, and we need to have accessto software permitting calculations with complex numbers or to performthe cumbersome translation into real and imaginary parts.
Nevertheless, some cases remain where diagonalization may still be appeal-ing.
Example A3.5 If
Q= ( 411( q21
q12
q22
is 2 x 2, the eigenvalue, say Al, of largest real part is often real (say, underthe conditions of the Perron-Frobenius theorem), and hence A2 is so because ofA2 = tr(Q). Everything is nice and explicit here:
411+q2+-D' )12_g11+q2-^^where D = z(411-422 ) +4412421.
2 2

APPENDIX 343
Write 7r (= v1) for the left eigenvector corresponding to a1 and k (= hl) forthe right eigenvector. Then
7r = (ir1 7r2 ) = a (q21 A l - q, 1) , k - C k2 )
//
=b ( A1 q1Q11 /
where a , b are any constants ensuring Irk = 1, i.e. l
ab (g12g21 + (A1 - 411) 2) = 1.
Of course, v2 and h2 can be computed in just the same way, replacing ai byA2. However, it is easier to note that 7rh2 = 0 and v2k = 1 implies
v2 = (k2 - k1), h2 =
Thus,
eqt = eNlt ( ir1ki i2k1\ ir1 k2 72 k2
+ eazt 7r2k2 -i2k1 (A.19)-7ri k2 7r1 k1
Example A3 .6 A particular important case arises when
Q = -q1 qi )q2 -q2 J
is an intensity matrix. Then Al = 0 and the corresponding left and right eigen-vectors are the stationary probability distribution 7r and e. The other eigenvalueis A = A2 = -q1 - Q2i and after some trivial calculus one gets
eQt =7r 1 112 + eat ( 7r2 -1r2
where (A.20)7r1 7r2 / -7r1 IF,
ir = (7fl 7r2) =q2 ql (A.21)
qi +q2 9l +q2
Here the first term is the stationary limit and the second term thus describesthe rate of convergence to stationarity. q
Example A3.7 Let3 9
2 14
7 11
2 2

344
Then
D= 2+ 11)'7
T4 -2 =52,
APPENDIX
x1 -3/2 - 11/2 + 5 -1, A2 = -3/2 - 11/2 - 5 - - -6,2 - 2
11=ab(142+(-1+2)2 ) = tab, ir =a(2
32 2)'
k=b
9
14 =b
-1+ 2
9
14
2
9 9
ir1 k1 ir2 k1 _ 2 10 707r1 k2 7r2 k2 5 7 1 '
10 10
9 9 1 9
e4" = e_,. 10 10 + e_6u 10 70
7 1 7 9
10 10 10 100
A4 Some linear algebra
4a Generalized inverses
A generalized inverse of a matrix A is defined as any matrix A- satisfying
AA-A = A. (A.22)
Note that in this generality it is not assumed that A is necessarily square, butonly that dimensions match , and a generalized inverse may not unique.
Generalized inverses play an important role in statistics. They are mostoften constructed by imposing some additional properties , for example
AA+A = A, A+AA+ = A+, (AA+)' = AA+, (A+A)' = A+A. (A.23)

APPENDIX 345
A matrix A+ satisfying (A.23) is called the Moore-Penrose inverse of A, and
exists and is unique (see for example Rao [300]). E.g., if A is a possibly singu-lar covariance matrix (non-negative definite), then there exists an orthogonalmatrix C such that A = CDC' where
D =
00
AP
Here we can assume that the A , are ordered such that Al > 0,. .. , Am > 0,
Am+1 = ... _ A,, = 0 where m < p is the rank of A, and can define
/ail 0 0
A+ = C0 A' 0 00 0 0 0 C' .
0 01In applied probability, one is also faced with singular matrices , most often
either an intensity matrix Q or a matrix of the form I-P where P is a transition
matrix . Assume that a unique stationary distribution w exists . Rather than
with generalized inverses , one then works with
Q = (Q - eir)-1, (I - P)- = (I - P + e7r)-1
(here (I - P + e7r)- 1 goes under the name fundamental matrix of the Markov
chain). These matrices are not generalized inverses but act roughly as inversesexcept that 7r and e play a particular role - e.g.
(Q - eir)-1Q = Q(Q - eir)-1 = I - ew.
Here is a typical result on the role of such matrices in applied probability:
Proposition A4.1 Let A be an irreducible intensity matrix with stationary row
vector it, and define D = (A - e ® 7r)-1. Then for some b > 0,
eAx dx = te7r + D(eAt - I) (A.24)lo
t= te7r - D + O(e-bt), (A.25)

346 APPENDIX
t 2
= eir + t(D + e-7r) + D(eAt - I) - DZ(ent - I) (A.26)
2= 2 e7r + tD - 2e7r - D + D2 + O(e-bt). (A.27)
xeAx dx
Proof Let A(t), B(t) denote the l.h.s. of (A.24), resp. the r.h.s. Then A(O) _B(O) = 0,
B'(t) = e7r + DAeAt = eir + (I - eir)eAt = eAt = A'(t).
(A.26) follows by integration by parts:
f t /'xeAx dx = [x {xe7r + D(eAx - I)},
t- J {xe^r + D(e - I)} dx.
o
Finally, the formulas involving O(e-6t) follow by Perron-Frobenius theory, seebelow. q
4b The Kronecker product ® and the Kronecker sum
We recall that if A(1) is a k1 x ml and A(2) a k2 x m2 matrix, then the Kronecker(tensor) product A(') ®A(2) is the (k1 x k2) x (ml x m2) matrix with (il i2) (jl j2)th
entry a;91a(2) . Equivalently, in block notationi2h
A®B= ( a11Ba21 B
a12B
a22 B
Example A4.2 Let it be a row vector with m components and h a columnvector with k components. Interpreting 7r, h as 1 x m and k x 1 matrices,respectively, it follows that h ® it is the k x m matrix with ijth element hi7rj .
I.e., h ® it reduces to hit in standard matrix notation. Note that h ® it hasrank 1; the rows are proportional to it, and the columns to h, and in fact anyrank 1 matrix can be written on this form. For example,
()®(6f 6/ 7f 8^
7 8 )=! ^)( 6 7 8)=(6^ 7^ 8^)\
q
Example A4.3 Let
Vf' N7A= 42 35 )' B= ( 8 ).

APPENDIX
Then
BA =®/- f- /- -
347
2 f 20- 3v'6- 3vV/7-2f 20- 3V8- 3f4v 4v 5v 506 7 64f 4-,A9- 5v'-8 5vf9-
11
A fundamental formula is
(A1B1C1) ®(A2B2C2) = (A1 (9 A2)(B1 (9 B2)(C1®C2). (A.28)
In particular, if Al = vi, A2 = v2 are row vectors and C1 = h1, C2 = h2 are
column vectors, then v1B1h1 and v2B2h2 are real numbers, and
v1B1h1 • v2B2h2 = v1B1h1 ® v2B2h2 = (v1(&v2 )(B1(&B2 )(h1(&h2 ) .(A.29)
If A and B are both square (k1 = ml and k2 = m2), then the Kronecker
sum is defined by
A(1) ®A(2) = A(1) ®Ik2 + k ®A(2). (A.30)
A crucial property is the fact that the functional equation for the exponentialfunction generalizes to Kronecker notation (note that in contrast eA+B = eAeB
typically only holds when A and B commute):
Proposition A4.4 eA®B = eA ®eB.
Proof We shall use the binomial formula
t / l(A ®B)t = I k Ak 0 B1-k
k=0
Indeed,
(A.31)
(AED B)1 = (A®I+I(9 B)l
is the sum of all products of t factors, each of which is A ® I or I ® B; if A ® I
occurs k times, such a factor is Ak (&B 1-k according to (A.29), and the numberof such factors is precisely given by the relevant binomial coefficient.
Using (A.31), it follows that
e® ® eB0o
An
J ®
ooBn
oo Ak ®Bl-k_ _ r
7 I F n! = ` k! (I - k)!(n-0 n=0 t=0 k=0
^. (A B)'L e!1=0
= eA®B
0

348APPENDIX
Remark A4.5 Many of the concepts and results in Kronecker calculus haveintuitive illustrations in probabilistic terms. Thus , p = P(1) ® p (2) is the
transition matrix of the bivariate Markov chain {X n1),X
n2) }, where {Xn1 ) },
{X(2) } are independent Markov chains with transition matrices P(1), P(2), and
Q = Q(1) ® Q(2)
= Q(1) ® I + I ® Q(2) (A.32)
is the intensity matrix of the bivariate continuous Markov process {Yt(1), Yt(2)
where{Y(1) }, {y (2) } are independent Markov processes with intensity matri-
ces Q (1), Q(2); in the definition (A.32), the first term on the r .h.s. represents
transitions in the {Yt(1) } component and the second transitions in the {Yt(2) }
component , and the form of the bivariate intensity matrix reflects the fact that
due to independence , {Yt(1), Yt(2) } cannot change state in both components at
the same time.A special case of Proposition A4.4 can easily be obtained by probabilistic
reasoning along the same lines . Let P8f P(Sl), P(t) be the s-step transition
matrices of {Yt(1), Yt(2 ) }, { 1't(1) }, resp . {Yt(2) }. From what has been said about
independent Markov chains, we have P8 = Pal) ® p(2). On the other hand,
P8 = exp {sQ} = exp {s (Q(1) ®Q(2)) } ,
Ps 1) = exp {sQ (1) } > p(2) = exp {sQ(2) }
Taking s = 1 for simplicity, P8 = Pal ) ® P82) can therefore be rewritten as
exp {Q (1) ® Q(2)1 = eXp {Q ( 1) } ® exp {Q(2) }
Also the following formula is basic:
Lemma A4 .6 Suppose that A and B are both square such that a +,3 < 0
whenever a is an eigenvalue of A and 0 is an eigenvalue of B. Let further it, v
be any row vectors and h, k any column vectors. Then
2ireAt h • veBt kdt = (^®v)(A®B)-1(e A®Ba - I)(h ® k). (A.33)
0

APPENDIX 349
Proof According to (A.29), the integrand can be written as
(7r (9 v)(eAt® eBt )(h ®k) = (7r ®v)(eA (DBt)(h (& k).
Now note that the eigenvalues of A ® B are of the form a +,3 whenever a is aneigenvalue of A and 3 is an eigenvalue of B, so that by asssumption A ® B is
invertible, and appeal to (A.12). q
4c The Perron-Frobenius theorem
Let A be a p x p-matrix with non-negative elements. We call A irreducibleif the pattern of zero and non-zero elements is the same as for an irreducibletransition matrix. That is, f o r each i, j = 1, ... , p there should exist io, il,... , in
such that io = i, i,, = j and atk_li,. > 0 for k = 1, . . . , n. Similarly, A is called
aperiodic if the pattern of zero and non-zero elements is the same as for anaperiodic transition matrix.
Here is the Perron-Frobenius theorem, which can be found in a great numberof books, see e.g. [APQ] X.1 and references there (to which we add Berman &Plemmons [63]):
Theorem A4.7 Let A be a p x p-matrix with non-negative elements. Then:
(a) The spectral radius Ao = max{JAI : A E sp(A)} is itself a strictly positive
and simple eigenvalue of A, and the corresponding left and right eigenvectorsv, h can be chosen with strictly positive elements;(b) if in addition A is aperiodic, then IN < Ao for all A E sp(A), and if we
normalize v, h such that vh = 1, then
An = Aohv+O(µ") = Aoh®v+O(µ") (A.34)
for some u. E (0, ao).
Note that for a transition matrix, we have AO = 1, h = e and v = 7r (the
stationary row vector)..The Perron-Frobenius theorem has an analogue for matrices B with prop-
erties similar to intensity matrices:
Corollary A4.8 Let B be an irreducible3 p x p-matrix with non-negative off-
diagonal elements. Then the eigenvalue Ao with largest real part is simple and
real, and the corresponding left and right eigenvectors v, h can be chosen with
3By this, we mean that the pattern of non-zero off-diagonal elements is the same as foran irreducible intensity matrix.

350 APPENDIX
strictly positive elements. Furthermore, if we normalize v, h such that vh = 1,then
eBt = ea0thv + O(eµt) = eA0th ® v + O(et t) (A.35)
for some p E (-oo, Ao).
Note that for an intensity matrix, we have A0 = 0, h = e and v = 7r (thestationary row vector).
Corollary A4.8 is most often not stated explicitly in textbooks, but is an easyconsequence of the Perron-Frobenius theorem. For example, one can considerA = 77I + B where rl > 0 is so large that all diagonal elements of A are strictlypositive (then A is irreducible and aperiodic), relate the eigenvalues of B tothose of B via (A. 10) and use the formula
00 Antnat
Bt - t= e-me
e = e n AL n!n=0
(cf. the analogy of this procedure with unformization, Example A3.2).
A5 Complements on phase-type distributions
5a Asymptotic exponentiality
In Proposition VIII.1.8, it was shown that under mild conditions the tail of aphase-type distribution B is asymptotical exponential. The next result gives acondition for asymptotical exponentiality, not only in the tail but in the wholedistribution. The content is that B is approximately exponential if the exit ratesti are small compared to the feedback intensities tij (i # j). To this end, notethat we can write the phase generator T as Q - (ti)diag where Q = T + (ti)diagis a proper intensity matrix (Qe = 0). I.e., the condition is that t is smallcompared to Q.
Proposition A5.1 Let Q be a proper irreducible intensity matrix with station-
ary distribution a, let t = (ti)iEE # 0 have non-negative entries and de-
fine T(°) = aQ - (ti)ding. Then for any (3, the phase-type distribution B(a)
with representation (,(3, T(°)) is asymptotically exponential with parameter t* _
rEiEE aiti as a -4 oo, Bi° (x) -+ a-t*x
Proof Let { 4 } be the phase process associated with B(a) and (°) its life-
length, let {Yti°i } be a Markov process with initial distribution a and intensity

APPENDIX 351
matrix aQ , and write Yt = Yt(1), ((1) etc. We can assume that Jta) = Yt(°),t < (a), and that Yt(a) = Yat for all t. Let further V be exponential withintensity V and independent of everything else. We can think of ( (a) as thefirst event in an inhomogeneous Poisson process (Cox process ) with intensity
process {tY( a) }v>0
. Hence we can represent ( (a) as
((a) = f tY( )dv=V} ^l
inf { t > O : = inf { t > O : J t adv = V }
jat l Jinf{t > 0: tydv =aV} =
JJJ a
where o (x) = inf {t >0: fo tY dv = x}. By the law of large numbers for
Markov processes , fo tY dv/t a$' t*, and this easily yields a(x)/x a-' 1/t*. Hence((a) aa. v/t-. O
We shall , in fact , prove a somewhat more general result which was used inthe proof of Proposition VI.1.9. In addition to the asymptotic exponentiality,it states that the state , from which the phase process is terminated , has a limitdistribution:
Proposition A5.2 Pi (c(a) > x, J(()) _ = i) -+ a-t•x t tt' .
Proof Assume first ti > 0 for all i and let I. = YQ(x). Then {Ix} is a Markovprocess with to = Yo. Conditioning upon whether {Yt} changes state in [0, dx/ti]or not, we get
F (Idx = j) = (1 + qijdxt )Sij + qij dt,x (1 - bij)
Hence the intensity matrix of {Ix} is (qij/ti)i,jEE, from which it is easily checkedthat the limiting stationary distribution is (aiti/t*)iEE•
Now let a' -4 oo with a in such a way that a' < a, a'/a -+ 1, a - a' -+ oo
(e.g. a' = a - aE where 0 < e < 1). Then a(a'V)/a (aV) a' 1. Since
JJ(.)_ = Y(a) = 1'aS(a) = Ya(av)^
it follows that
Pi ((,(a) > x , J^O)_ = j)
Pi (v(aaV) > x,YQ(av) = j) Pi ( ci(a'V) > x,Yj(av) = j f

352 APPENDIX
rr Ia(a'V)Ei LI (
at> x) P (Yo (aV)
,., Et II I a(a^V) > x) at' J .+ a-t*x • a't'L ` at t* t*
Reducing the state space of {Ix } to {i E E : t, > 0}, an easy modification ofthe argument yields finally the result for the case where t; = 0 for one or morei. q
Notes and references Propositions A5.1 and A5.2 do not appear to be in theliterature. However, these results are in the spirit of rare events theory for regenerativeprocesses (e.g. Keilson [223], Gnedenko & Kovalenko [164] and Glasserman & Kou[162]). See also Korolyuk, Penev & Turbin [238].
5b Discrete phase-type distributions
The theory of discrete phase-type distributions is a close parallel of the contin-uous case, so we shall be brief.
A distribution B on {1, 2, ...} is said to be discrete phase-type with represen-tation (E, P, a) if B is the lifelength of a terminating Markov chain (in discretetime) on E which has transition matrix P = (p,j) and initial distribution a.Then P is substochastic and the vector of exit probabilities is p = e - Pe.
Example A5.3 As the exponential distribution is the simplest continuous phase-type distribution, so is the geometric distribution, with point probabilities bk =(1 - p)k-1 p, k = 1, 2, ..., the simplest discrete phase-type distribution: here Ehas only one element, and thus the parameter p of the geometric distributioncan be identified with the exit probability vector p. q
Example A5.4 Any discrete distribution B with finite support, say bk = 0,k > K, is discrete phase-type. Indeed, let E K}, a = b = (bk)k=1,...,xand
Pkj 1 k>1,j=k-1, 1 k=1
0 otherwise, ' pk 0 k>1
11
Theorem A5.5 Let B be discrete phase-type with representation (P, a). Then:(a) The point probabilities are bk = aPk-lp;
(b) the generating function b[z] _ E' , zkbk is za(I - zP)-'p;
(c) the nth moment k1 k"bkis 1)"n!aP-"p.

APPENDIX 353
5c Closure properties
Example A5.6 (CONVOLUTIONS) Let B1, B2 be phase-type with represen-
tations (E(1),a(1),T(1)), resp. (E(2),a(2),T(2)). Then the convolution B =
B1 * B2 is phase-type with representation (E, a, T) where E = E(1) + E(2) isthe disjoint union of E(1) and E(2), and
_ a=1), i EE(1) T(1) t(1)a(2)
a' - { 0, i E E(2) , T= ( 0 T(2) )(A.36)
in block-partitioned notation (where we could also write a as (a (1) 0)). Areduced phase diagram (omitting transitions within the two blocks) is
amE(1)
t(1) a(2) (2) t(2)
Figure A.2
The form of these results is easily recognized if one considers two indepen-
dent phase processes { Jt 1) }, { Jt 2) } with lifetimes U1 , resp . U2, and piece the
processes together by
41) 0<t<U1it =
Jt2U, U1 < t < U1 + U2
A, t > U1 + U2.
Then {Jt} has lifetime U1 + U2 , initial distribution a and phase generator T.11
Example A5.7 (THE NEGATIVE BINOMIAL DISTRIBUTION) The most trivial
special case of Example A5.6 is the Erlang distribution Er which is the convo-
lution of r exponential distributions. The discrete counterpart is the negative
binomial distribution with point probabilities
bk k1)r - 1
(1 k = r,r + 1,....
This corresponds to a convolution of r geometric distributions with the sameparameter p, and hence the negative binomial distribution is discrete phase-type, as is seen by minor modifications of Example A5.6. q

354 APPENDIX
Example A5.8 (FINITE MIXTURES) Let B1, B2 be phase-type with repre-
sentations (E(1),a(1),T(1)), resp. (E(2),a(2),T(2)). Then the mixture B =9B1 + (1 - O)B2 (0 < 0 < 1) is phase-type with representation (E, a, T) where
E = E(1) + E(2) is the disjoint union of E(1) and E(2), and
Oa;'), i E E(1) T = I T(1) 0 I (A.37)o'i
(1 - 0)ai2), i E E(2) 0 T(2)
(in block-partitioned notation, this means that a = (Oa(1) (1 - 0)a(2))). Areduced phase diagram is
0a(1)
E
A
- 0)a(2)
a
Figure A.3
In exactly the same way, a mixture of more than two phase-type distributionsis seen to be phase-type. In risk theory, one obvious interpretation of the claimsize distribution B to be a mixture is several types of claims. q
Example A5.9 (INFINITE MIXTURES WITH T FIXED) Assume that a = a(°)depends on a parameter a E A whereas E and T are the same for all a. Let B(")be the corresponding phase-type distribution, and consider B(") = fA B(a) v(da)
where v is a probability measure on A. Then it is trivial to see that B(") isphase-type with representation (a("),T,E) where a(°) = fAa(a)v(da). q
Example A5.10 (GEOMETRIC COMPOUNDS) Let B be phase-type with repre-sentation (E, a, T) and C = EO°_1(1 - p)pn-1B*n. Equivalently, if U1, U2,...are i.i.d. with common distribution and N is independent of the Uk and geo-metrically distributed with parameter p, P(N = n) = (1 - p)pn-1, then C isthe distribution of Ul + • • • + UN. To obtain a phase process for C, we needto restart the phase process for B w.p. p at each termination. Thus, a reducedphase diagram is
f
E(1)
E(2)
t
Figure A.4

APPENDIX 355
and C is phase-type with representation (E, a, T + pta). Minor modificationsof the argument show that
1. If U1 has a different initial vector, say v, but the same T, then U1 +• +UNis phase-type with representation (E, v,T + pta);
2. if B is defective and N + 1 is the first n with U„ = oo, then U1 + • • + UN iszero-modified phase-type with representation (a, T + ta, E). Note thatthis was exactly the structure of the lifetime of a terminating renewalprocess, cf. Corollary VIII.2.2. q
Example A5.11 (OVERSHOOTS) The overshoot of U over x is defined as thedistribution of (U - x)+. It is zero-modified phase-type with representation
(E,aeTx,T) if U is phase-type with representation (E, a, T). Indeed, if {Jt}is a phase process for U, then Jy has distribution aeTx.
If we replace x by a r.v. X independent of U, say with distribution F, itfollows by mixing (Example A5.9) that (U - X)+ is zero-modified phase-typewith representation (E,aF[T],T) where
F[T] = J "o eTx F(dx)0
is the matrix m.g.f. of F, cf. Proposition VIII.1.7. q
Example A5 . 12 (PHASE-TYPE COMPOUNDS ) Let fl, f2.... be the point prob-abilities of a discrete phase-type distribution with representation (E, a, P), letB be a continuous phase-type distribution with representation (F, v, T) andC = F,,°,°_1 f„B*?l. Equivalently, if U1, U2, ... are i . i.d. with common distribu-tion B and N is independent of the Uk with P(N = n) = f,,, then C is thedistribution of U1 + • • • + UN. To obtain a phase representation for C , let thephase space be E x F = {i j : i E E, j E F}, let the initial vector be a ® v andlet the phase generator be I ® T + P ® (ta). q
Example A5 . 13 (MINIMA AND MAXIMA ) Let U1, U2 be random variables withdistributions B1, B2 of phase-type with representations (E('),a(1),TWWW), resp.
(E(2), a(2), T(2) ). Then the minimum U1 A U2 and the maximum U1 V U2 areagain phase-type.
To see this, let {Jtl)}, { Jt2) } be independent with lifetimes U1, resp. U2.
For U1 A U2, we then let the governing phase process be {Jt} _ {(411 Jt2))}
interpreting exit of either of {4 M }, {2)
4 } as exit of {Jt}. Thus the represen-
tation is
(E(1) x E(2), a(1) ® a(2), T(1) ® T(2)).

356 APPENDIX
For U1 V U2, we need to allow { Jt,2) } to go on (on E(2)) when { i 1) } exits, and
vice versa. Thus the state space is E(1 ) x E(2) U E(1) U E( 2), the initial vectoris (a(1) (& a (2) 0 0), and the phase generator is
T(1) ®T(2) T(1) ®t(2) t(1) ® T(2)0 T(1) 00 0 T(2)
Notes and references The results of the present section are standard , see Neuts
[269] (where the proof, however, relies more on matrix algebra than the probabilistic
interpretation exploited here).
5d Phase-type approximation
A fundamental property of phase-type distributions is denseness . That is, anydistribution B on (0, oo) can be approximated 'arbitrarily close' by a phase-typedistribution B:
Theorem A5.14 To a given distribution B on (0, oo), there is a sequence {B,,}
of phase-type distributions such that Bn 3 B as n -+ oo.
Proof Assume first that B is a one-point distribution, say degenerate at b, and
let Bn be the Erlang distribution E,,(Sn) with Sn = n/b. The mean of B„ is
n/Sn = b and the variance is n/Sn = b2/n. Hence it is immediate that Bn 4 B.
The general case now follows easily from this, the fact that any distributionB can be approximated arbitrarily close by a distribution with finite support,and the closedness of the class of phase-type distributions under the formationof finite mixtures, cf. Example A5.8. Here are the details at two somewhatdifferent levels of abstraction:
(diagonal argument , elementary) Let {bk} be any dense sequence of con-
tinuity points for B(x). Then we must find phase-type distributions Bn
with B,(bk) -+ B(bk) for all k. Now we can find first a sequence {Dm}of distributions with finite support such that D,,(bk) -+ B(bk) for all kas n -* oo. By the diagonal argument (subsequent thinnings), we canassume that ID.(bk)'- B(bk) I < 1/n for n > k. Let the support of Dn be{xl(n),...,xq(n)(n)}, with weight pi(n) for xi(n). Then from above,
q(n) q(n)
__ )C,-,n = I:pi(n)Er v pi(n)a ,(n) = D, r # oo.
1( n) )
1a= i=

APPENDIX 357
Hence we can choose r(n) in such a way that
Then
ICr(n),n (bk) - D(bk)I < n, k < n.
2, k < n,ICr( n),n( bk ) - B(bk )I < -
and we can take Bn = Cr(n),n. q
(abstract topological ) The essence of the argument above is that the closure(w.r.t. the topology for weak convergence) PET of the class PET ofphase-type distributions contains all one-point distributions. Since PETis closed under the continuous operation of formation of finite mixtures,PIT contains all finite mixtures of one-point distributions, i.e. the classCO of all discrete distributions. But To is the class G of all distributionson [0, oo). Hence G C PET and L = PIT. q
Theorem A5.14 is fundamental and can motivate phase-type assumptions,say on the claim size distribution B in risk theory, in at least two ways:
insensitivity Suppose we are able to verify a specific result when B is of phase-type say that two functionals Cpl (B) and W2 (B) coincide. If Cpl (B) and^02(B) are weakly continuous, then it is immediate that WI(B) = p2(B)for all distributions B on [0, oo)
approximation Assume that we can compute a functional W(B) when B isphase-type, and that cp is known to be continuous. For a general Bo, wecan then approximate Bo by a phase-type B, compute W(B) and use thisquantity as an approximation to cp(B0). In particular, if information onBo is given in terms of observations (i.i.d. replications), one would use theB given by some statistical fitting procedure (see below).
It should be noted, however, that this procedure should be used with careif ^p(B) is the ruin probability O(u) and u is large.
Let E be the class of functions f : [0, oo) -* [0, oo) such that f (x) = O(e«x),x -4 oo, for some a < oo.
Corollary A5.15 To a given distribution B on (0 , oo) and any fl, f2.... E E,
there is a sequence {Bn} of phase -type distributions such that Bn Di B asn -4 oo and f ' f,(x)Bf,(dx) -* f r f{(x)B(dx), i = 1, 2,....

358
Proof By Fatou's lemma , B,, - B implies that
00 00liminf J fi(x)B.(dx) > J fi(x)B(dx),n-,oo o o
APPENDIX
for each i, and hence it is sufficient to show that we can obtain
limsup J fi(x)Bn(dx) < f fi(x)B(dx), i=1,2 ..... (A.38)n-4oo o 0TO
We first show that for each f E E,
nB=az, Bn=En z
Indeed, if f (x ) = e°x, then
cc
f f (x)Bn(dx) -fof (x)B(dx) =° (A.39)
f (x)Bn (dx) = (?!c ) = 1 1 1 e'= .f (z) = f .f (x)B(dx),1-n/ o
and the case of a general f then follows from the definition of the class E and auniform integrability argument.
Now returning to the proof of (A.38), we may assume that in the proof of
Theorem A5.14 Dn has been chosen such that
o
00 1 °°
+ - f fi(x)B(dx), i = 1, ..., n.f fi(x)Dn(dx) < 1+-'\ n o
By (A.39),
fi(x)Dn(dx),f00 fi(x)Cr,n(dx) -+ f0
and hence we may choose r(n) such that
L f (x)Cr(n),n(dx) < 1+-9l) f ' f (x)B(dx), i = 1, ... , n.\\ 0
Corollary A5.16 To a given distribution B on (0 , oo), there is a sequence
{Bn} of phase-type distributions such that Bn -Di B as n -+ oo and all moments
converge, f° xtBn(dx ) -* f °° x`B(dx), i = 1, 2, ....

APPENDIX 359
In compound Poisson risk processes with arrival intensity /3 and claim sizedistribution B satisfying ,l3µb < 1, the adjustment coefficient 'y = 7(B,/3) isdefined as the unique solution > 0 of B[-y] = l+y/j3. The adjustment coefficientis a fundamental quantity , and therefore the following result is highly relevantas support for phase-type assumptions in risk theory:
Corollary A5.17 To a given /3 > 0 and a given distribution B on (0 , oo) withB[-y +e] < oo for some e > y = 7(B,/3), there is a sequence {B,,} of phase-type
distributions such that Bfz + B as n -* oo and -Yn -4 ry where ryn = y(Bn,,3).
Proof Let fi(x) = el'r+E;>y for some sequence {ei} with ei E (0, e ) and ei J. 0 asi -* oo. If ei > 0, then
Bn['Y + ei] -* B[y + ei] > 1 + 7
Q
implies that 'yn < ry + ei for all sufficiently large n . I.e., lim sup ryn < 7. lim inf >is proved similarly. O
We state without proof the following result:
Corollary A5.18 In the setting of Corollary A5.16, one can obtain 7(Bn, /3)= ry for all n.
Notes and references Theorem A5.14 is classical; the remaining results may beslightly stronger than those given in the literature, but are certainly not unexpected.
5e Phase-type fitting
As has been mentioned a number of times already, there is substantial advantagein assuming the claim sizes to be phase-type when one wants to compute ruinprobabilities. For practical purposes, the problem thus arises of how to fit aphase-type distribution B to a given set of data (1, . . . , (N. The present sectionis a survey of some of the available approaches and software for inplementingthis.
We shall formulate the problem in the slightly broader setting of fitting aphase-type distribution B to a given set of data (1i . . . , (N or a given distributionBo. This is motivated in part from the fact that a number of non-phase-typedistributions like the lognormal, the loggamma or the Weibull have been arguedto provide adequate descriptions of claim size distributions, and in part from thefact that many of the algorithms that we describe below have been formulatedwithin the set-up of fitting distributions. However, from a more conceptual

360 APPENDIX
point of view the two sets of problems are hardly different : an equivalent rep-
resentation of a set of data (1 , ... , (N is the empirical distribution Be, giving
mass 1 /N to each S=.
Of course , one could argue that the results of the preceding section concern-ing phase-type approximation contains a solution to our problem : given Bo (or
Be), we have constructed a sequence {B,,} of phase-type distribution such that
B„ Bo, and as fitted distribution we may take B,, for some suitable large n.
The problem is that the constructions of {B„} are not economical : the number
of phases grows rapidly, and in practice this sets a limitation to the usefulness
(the curse of dimensionality ; we do not not want to perform matrix calculus in
hundreds or thousands dimensions).A number of approaches restrict the phase -type distribution to a suitable
class of mixtures of Erlang distributions . The earliest such reference is Bux &
Herzog [85] who assumed that the Erlang distributions have the same rate pa-rameter, and used a non-linear programming approach . The constraints werethe exact fit of the two first moments and the objective function to be minimizedinvolved the deviation of the empirical and fitted c.d.f. at a a number of selectedpoints . In a series of papers (e.g. [216] ), Johnson & Taaffe considered a mixture
of two Erlangs (with different rates ) and matched (when possible ) the first three
moments . Schmickler (the MEDA package; e .g. [317] ) has considered an exten-
sion of this set-up, where more than two Erlangs are allowed and in addition tothe exact matching of the first three moments a more general deviation measureis minimized (e.g. the L1 distance between the c . d.f.'s).
The characteristics of all of these methods is that even the number of pa-rameters may be low (e.g . three for a mixture of two Erlangs ), the number ofphases required for a good fit will typically be much larger, and this is whatmatters when using phase-type distributions as computational vehicle in say
renewal theory, risk theory , reliability or queueing theory. It seems therefore akey issue to develop methods allowing for a more general phase diagram, and wenext describe two such approaches which also have the feature of being basedupon the traditional statistical tool of like maximum likelihood.
A method developed by Bobbio and co-workers (see e .g. [70]) restrict atten-
tion to acyclic phase-type distributions , defined by the absence of loops in the
phase diagram . The likelihood function is maximized by a local linearizationmethod allowing to use linear programming techniques.
Asmussen & Nerman [38] implemented maximum likelihood in the full classof phase-type distributions via the EM algorithm ; a program package writtenin C for the SUN workstation or the PC is available as shareware, cf. [202].The observation is that the statistical problem would be straightforward if the
whole (EA-valued ) phase process { Jtk)}o<t<(
associated with each observa-k

APPENDIX 361
tion Sk was available. In fact, then the estimators would be of simple occurence-exposure type,
EN1 I(-(k) = i)
ai = N
where
tii=i iEE, jEEA,
N
fTi = I(J= i) dt, Nii = = , = j)k=1 k=1 tE[0,(k]
(Ti is the total time spent in state i and Nii is the total number of jumpsfrom i to j). The general idea of the EM algorithm ([106]) is to replace suchunobserved quantities by the conditional expectation given the observations;since this is parameter-dependent, one is lead to an iterative scheme, e.g.
(n+1) _ Ea (n),T(n) (Nik IC1, ... , (N)) (^ 54
k)+tJk
E ^^(T (1, ... ,a ( n),T(n) Ni
and similarly for the cn+1) The crux is the computation of the conditionalexpectations. E.g., it is easy to see that
Ea(n),T(n)(TiI(1,...,(N) =
N (k
I (Jti) dtE Ea(n),T(n)fok=1 \
N f:i a(n)eT(n)xei . eieT(n)((k- x)t(n)
1 a(n)eT(n )(kt(n)
and this and similar expressions are then computed by numerical solution of aset of differential equations.
In practice, the methods of [70] and [38] appear to produce almost identicalresults. Thus, it seems open whether the restriction to the acyclic case is asevere loss of generality.

This page is intentionally left blank

Bibliography
[1] J. Abate, G.L. Choudhury & W. Whitt (1994) Waiting-time tail probabilities inqueues with long-tail service-time distributions . Queueing Systems 16, 311-338.
[2] J. Abate & W. Whitt (1992 ) The Fourier-series method for inverting transformsof probability distributions . Queueing Systems 10, 5-87.
[3] J. Abate & W. Whitt (1998) Explicit M/G/1 waiting-time distributions for aclass of long-tail service time distributions . Preprint, AT&T.
[4] M. Abramowitz & I. Stegun ( 1972 ) Handbook of Mathematical Functions (10thed.). Dover, New York.
[5] G. Alsmeyer (1991) Erneuerungstheorie . B.G. Teubner, Stuttgart.[6] V. Anantharam (1988 ) How large delays build up in a GI/GI11 queue . Queueing
Systems 5 , 345-368.
[7] E. Sparre Andersen (1957) On the collective theory of risk in the case of conta-gion between the claims . Transactions XVth International Congress of Actuar-ies, New York, II, 219-229.
[8] G. Arfwedson (1954) Research in collective risk theory . Skand. Aktuar Tidskr.37, 191-223.
[9] G. Arfwedson ( 1955 ) Research in collective risk theory. The case of equal risksums. Skand. Aktuar Tidskr. 38, 53-100.
[10] K. Arndt (1984) On the distribution of the supremum of a random walk on aMarkov chain . In: Limit Theorems and Related Problems (A.A. Borokov, ed.),pp. 253-267. Optimizations Software, New York.
[11) S. Asmussen ( 1982 ) Conditioned limit theorems relating a random walk to itsassociate, with applications to risk reserve processes and the GI /G/1 queue.Adv. Appl. Probab. 14, 143-170.
[12] S. Asmussen (1984) Approximations for the probability of ruin within finitetime . Scand. Act. J. 1984 , 31-57; ibid. 1985, 57.
[13] S. Asmussen (1985) Conjugate processes and the simulation of ruin problems.Stoch. Proc. Appl. 20, 213-229.
[14] S. Asmussen (1987) Applied Probability and Queues. John Wiley & Sons, Chich-ester New York.
[15] S. Asmussen (1989a) Aspects of matrix Wiener-Hopf factorisation in appliedprobability. The Mathematical Scientist 14, 101-116.
363

364 BIBLIOGRAPHY
[16] S. Asmussen (1989b) Risk theory in a Markovian environment. Scand. Act. J.
1989 , 69-100.[17] S. Asmussen (1991) Ladder heights and the Markov-modulated M/G/1 queue.
Stoch. Proc. Appl. 37, 313-326.[18] S. Asmussen (1992a) Phase-type representations in random walk and queueing
problems. Ann. Probab. 20, 772-789.[19] S. Asmussen (1992b) Light traffic equivalence in single server queues. Ann. Appl.
Probab. 2, 555-574.[20] S. Asmussen (1992c) Stationary distributions for fluid flow models and Markov-
modulated reflected Brownian motion. Stochastic Models 11, 21-49.
[21] S. Asmussen (1995) Stationary distributions via first passage times. Advances inQueueing: Models, Methods V Problems (J. Dshalalow ed.), 79-102. CRC Press,Boca Raton, Florida.
[22] S. Asmussen (1998a) Subexponential asymptotics for stochastic processes: ex-tremal behaviour, stationary distributions and first passage probabilities. Ann.Appl. Probab. 8, 354-374.
[23] S. Asmussen (1998b) Extreme value theory for queues via cycle maxima. Ex-
tremes 1 , 137-168.[24] S. Asmussen (1998c) A probabilistic look at the Wiener-Hopf equation. SIAM
Review 40, 189-201.
[25] S. Asmussen (1999) On the ruin problem for some adapted premium rules. Prob-
abilistic Analysis of Rare Events (V.K. Kalashnikov & A.M. Andronov, eds.),3-15. Riga Aviation University.
[26] S. Asmussen (2000) Matrix-analytic models and their analysis. Scand. J. Statist.27, 193-226.
[27] S. Asmussen & K. Binswanger (1997) Simulation of ruin probabilities for subex-
ponential claims. Astin Bulletin 27, 297-318.
[28] S. Asmussen, K. Binswanger & B. Hojgaard (2000) Rare events simulation for
heavy-tailed distributions. Bernoulli 6, 303-322.
[29] S. Asmussen & M. Bladt (1996) Renewal theory and queueing algorithms formatrix-exponential distributions. Matrix-Analytic Methods in Stochastic Models(A.S. Alfa & S. Chakravarty, eds.), 313-341. Marcel Dekker, New York.
[30] S. Asmussen & M. Bladt (1996) Phase-type distributions and risk processes
with premiums dependent on the current reserve. Scand. Act. J. 1996, 19-36.
[31] S. Asmussen, L. Floe Henriksen & C. Kliippelberg (1994) Large claims approx-
imations for risk processes in a Markovian environment. Stoch. Proc. Appl. 54,
29-43.
[32] S. Asmussen, A. Frey, T. Rolski & V. Schmidt (1995) Does Markov-modulationincrease the risk? ASTIN Bull. 25, 49-66.
[33] S. Asmussen & B. Hojgaard (1996) Finite horizon ruin probabilities for Markov-
modulated risk processes with heavy tails. Th. Random Processes 2, 96-107.
[34] S. Asmussen & B. Hojgaard (1999) Approximations for finite horizon ruin prob-
abilities in the renewal model. Scand. Act. J. 1999 , 106-119.

BIBLIOGRAPHY 365
[35] S. Asmussen, B. Hojgaard & M. Taksar (2000) Optimal risk control and dividenddistribution policies . Example of excess-off-loss reinsurance for an insurancecorporation. Finance and Stochastics 4, 299-324.
[36] S. Asmussen & C. Kliippelberg (1996) Large deviations results for subexponen-tial tails, with applications to insurance risk Stoch. Proc. Appl. 64, 103-125.
[37] S. Asmussen & G. Koole (1993). Marked point processes as limits of Markovian
arrival streams. J. Appl. Probab. 30, 365-372.[38] S. Asmussen , O. Nerman & M. Olsson (1996). Fitting phase-type distributions
via the EM algorithm. Scand. J. Statist. 23, 419-441.[39] S. Asmussen & H.M. Nielsen (1995) Ruin probabilities via local adjustment
coefficients . J. Appl. Prob 32 , 736-755.[40] S. Asmussen & C.A. O'Cinneide (2000/01) On the tail of the waiting time in a
Markov-modulated M/G/1 queue. Opns. Res. (to appear).
[41] S. Asmussen & C.A. O'Cinneide (2000/2001) Matrix-exponential distributions
[Distributions with a rational Laplace transform] Encyclopedia of Statistical Sci-
ences, Supplementary Volume (Kotz, Johnson, Read eds.). Wiley.
[42] S. Asmussen & D. Perry (1992) On cycle maxima, first passage problems and
extreme value theory for queues. Stochastic Models 8, 421-458.
[43] S. Asmussen & T. Rolski (1991) Computational methods in risk theory: amatrix-algorithmic approach. Insurance: Mathematics and Economics 10, 259-274.
[44] S. Asmussen & T. Rolski (1994) Risk theory in a periodic environment: Lund-berg's inequality and the Cramer-Lundberg approximation. Math. Oper. Res.410-433.
[45] S. Asmussen & R.Y. Rubinstein (1995) Steady-state rare events simulation inqueueing models and its complexity properties. Advances in Queueing: Models,Methods 8 Problems (J. Dshalalow ed.), 429-466. CRC Press, Boca Raton,Florida.
[46] S. Asmussen & R.Y. Rubinstein (1999) Sensitivity analysis of insurance riskmodels. Management Science 45, 1125-1141.
[47] S. Asmussen, H. Schmidli & V. Schmidt (1999) Tail approximations for non-standard risk and queueing processes with subexponential tails. Adv. Appl.Probab. 31, 422-447.
[48] S. Asmussen & V. Schmidt (1993) The ascending ladder height distribution for
a class of dependent random walks. Statistica Neerlandica 47, 1-9.
[49] S. Asmussen & V. Schmidt (1995) Ladder height distributions with marks . Stoch.
Proc. Appl. 58, 105-119.
[50] S. Asmussen & S. Schock Petersen (1989) Ruin probabilities expressed in terms
of storage processes. Adv. Appl. Probab. 20, 913-916.
[51] S. Asmussen & K. Sigman (1996) Monotone stochastic recursions and theirduals. Probab. Th. Eng. Inf. Sc. 10, 1-20.
[52] S. Asmussen & M. Taksar (1997) Controlled diffusion models for optimal divi-
dend payout. Insurance: Mathematics and Economics 20, 1-15.

366 BIBLIOGRAPHY
[53] S. Asmussen & J.L. Teugels ( 1996) Convergence rates for M /G/1 queues andruin problems with heavy tails . J. Appl. Probab. 33, 1181-1190.
[54] K.B . Athreya & P. Ney ( 1972) Branching Processes . Springer , Berlin.
[55] B. von Bahr (1974) Ruin probabilities expressed in terms of ladder height dis-tributions. Scand. Act. J. 1974, 190-204.
[56] B. von Bahr (1975) Asymptotic ruin probabilities when exponential momentsdo not exist. Scand. Act. J. 1975, 6-10.
[57] C.T.H. Baker (1977) The Numerical Solution of Integral Equations. ClarendonPress, Oxford.
[58] O. Barndorff-Nielsen (1978) Information and Exponential Families in StatisticalTheory. Wiley, New York.
[59] O. Barndorff-Nielsen & H. Schmidli (1995) Saddlepoint approximations for theprobability of ruin in finite time. Scand. Act. J. 1995 , 169-186.
[60] J. Beekman (1969) A ruin function approximation. Trans. Soc. Actuaries 21,41-48, 275-279.
[61] J. Beekman (1974) Two Stochastic Processes. Halsted Press, New York.
[62] J.A. Beekman (1985) A series for infinite time ruin probabilities. Insurance:Mathematics and Economics 4, 129-134.
[63] A. Berman & R.J. Plemmons (1994) Nonnegative Matrices in the MathematicalSciences. SIAM.
[64] P. Billingsley (1968) Convergence of Probability Measures. Wiley, New York.
[65] N.H. Bingham (1975) Fluctuation theory in continuous time. Adv. Appl. Probab.
7, 705-766.
[66] N.H. Bingham, C.M. Goldie & J.L. Teugels (1987) Regular Variation. CambridgeUniversity Press, Cambridge.
[67] T. Bjork & J. Grandell (1985) An insensitivity property of the ruin probability.Scand. Act. J. 1985 , 148-156.
[68] T. Bjork & J. Grandell (1988) Exponential inequalities for ruin probabilities inthe Cox case. Scand. Act. J. 1988 , 77-111.
[69] P. Bloomfield & D.R. Cox (1972) A low traffic approximation for queues. J.Appl. Probab. 9, 832-840.
[70] A. Bobbio & M. Telek (1994) A bencmark for PH estimation algorithms: resultsfor acyclic PH. Stochastic Models 10, 661-667.
[71] P. Boogaert & V. Crijns (1987) Upper bounds on ruin probabilities in caseof negative loadings and positive interest rates. Insurance: Mathematics andEconomics 6, 221-232.
[72] P. Boogaert & A. de Waegenaere (1990) Simulation of ruin probabilities. Insur-ance: Mathematics and Economics 9, 95-99.
[73] A.A. Borovkov (1976) Asymptotic Methods in Queueing Theory. Springer-Verlag.

BIBLIOGRAPHY 367
[74] O. Boxma & J.W. Cohen (1998) The M/G/1 queue with heavy-tailed servicetime distribution. IEEE J. Sel. Area Commun. 16, 749-763.
[75] O. Boxma & J.W. Cohen (1999) Heavy-traffic analysis for the GI/G/1 queue
with heavy-tailed service time distributions . Queueing Systems 33, 177-204.
[76] N.L. Bowers , Jr., H.U. Gerber, J.C. Hickman, D.A. Jones & C.J. Nesbitt (1986)
Actuarial Mathematics . The Society of Actuaries , Itasca , Illinois.[77] P. Bratley, B.L. Fox & L. Schrage (1987) A Guide to Simulation. Springer, New
York.
[78] L. Breiman (1968) Probability. Addison-Wesley, Reading.
[79] P.J. Brockwell , S.I. Resnick & R.L. Tweedie (1982 ) Storage processes with gen-
eral release rule and additive inputs . Adv. Appl. Probab . 14, 392-433.
[80] F. Broeck , M. Goovaerts & F. De Vylder (1986 ) Ordering of risks and ruin
probabilities. Insurance : Mathematics and Economics 5, 35-39.
[81] J.A. Bucklew (1990) Large Deviation Techniques in Decision , Simulation and
Estimation . Wiley, New York.
[82] H. Biihlmann ( 1970) Mathematical Methods in Risk Theory . Springer-Verlag,
Berlin.
[83] D.Y . Burman & D .R. Smith ( 1983 ) Asymptotic analysis of a queueing system
with bursty traffic. Bell. Syst. Tech. J. 62, 1433-1453.
[84] D.Y. Burman & D.R. Smith (1986 ) An asymptotic analysis of a queueing system
with Markov-modulated arrivals . Oper. Res. 34 , 105-119.
[85] W. Bux & U. Herzog (1977) The phase concept : approximations of measured
data and performance analysis . Computer Performance (K.M. Chandy & M.
Reiser eds.), 23-38. North-Holland, Amsterdam.
[86] K.L. Chung (1974) A Course in Probability Theory (2nd ed.). Academic Press,
New York San Francisco London.
[87] E. Qinlar (1972) Markov additive processes. II. Z. Wahrscheinlichkeitsth. verve.
Geb. 24, 93-121.
[88] J.W. Cohen (1982) The Single Server Queue (2nd ed.) North-Holland, Amster-
dam.
[89] M. Cottrell, J.-C. Fort & G. Malgouyres (1983) Large deviations and rare events
in the study of stochastic algorithms . IEEE Trans. Aut. Control AC-28, 907-
920.[90] D.R. Cox (1955) Use of complex probabilities in the theory of stochastic pro-
cesses. Proc. Cambr. Philos. Soc. 51, 313-319.
[91] H. Cramer (1930) On the Mathematical Theory of Risk. Skandia Jubilee Volume,
Stockholm.
[92] H. Cramer (1955) Collective risk theory. The Jubilee volume of Forsakringsbo-laget Skandia, Stockholm.
[93] K. Croux & N. Veraverbeke (1990). Non-parametric estimators for the proba-
bility of ruin. Insurance : Mathematics and Economics 9, 127-130.

368 BIBLIOGRAPHY
[94] M. Csorgo & J. Steinebach ( 1991 ) On the estimation of the adjustment coef-ficient in risk theory via intermediate order statistics . Insurance : Mathematicsand Economics 10, 37-50.
[95] M. Csorgo & J.L. Teugels ( 1990 ) Empirical Laplace transform and approxima-tion of compound distributions . J. Appl. Probab . 27, 88-101.
[96] D. Daley & T. Rolski (1984) A light traffic approximation for a single serverqueue. Math. Oper. Res. 9 , 624-628.
[97] D. Daley & T. Rolski (1991) Light traffic approximations in queues. Math. Oper.Res. 16 , 57-71.
[98] A. Dassios & P. Embrechts (1989). Martingales and insurance risk. StochasticModels 5, 181-217.
[99] R. van Dawen (1986) Ein einfacher Beweis fur Ohlins Lemma. Blotter der
deutschen Gesellschaft fur Versicherungsmathematik XVII, 435-436.
[100] A. Davidson (1946) On the ruin problem of collective risk theory under theassumption of a variable safety loading (in Swedish). ForsiikringsmatematiskaStudier Tillagnade Filip Lundberg, Stockholm. English version published inSkand. Aktuar. Tidskr. Suppl., 70-83 (1969).
[101] C.D. Daykin, T. Pentikainen & E. Pesonen (1994) Practical Risk Theory forActuaries. Chapman & Hall.
[102] P. Deheuvels & J. Steinebach (1990) On some alternative estimators of theadjustment coefficient in risk theory. Scand. Act. J. 1990 , 135-159.
[103] F. Delbaen & J. Haezendonck (1985) Inversed martingales in risk theory. Insur-ance: Mathematics and Economics 4, 201-206.
[104] F. Delbaen & J. Haezendonck (1987) Classical risk theory in an economic envi-ronment. Insurance: Mathematics and Economics 6, 85-116.
[105] A. Dembo & O. Zeitouni (1992) Large Deviations Techniques and Applications.Jones and Bartlett, Boston.
[106] A.P. Dempster, N.M. Laird & D.B. Rubin (1977) Maximum likelihood fromincomplete data via the EM algorithm. J. Roy. Statist. Soc. 22, 583-602.
[107] L. Devroye (1986) Non-uniform Random Variate Generation. Springer, NewYork.
[108] F. De Vylder (1977) A new proof of a known result in risk theory. J. Comp.Appl. Math. 3, 227-229.
[109] F. De Vylder (1978) A practical solution to the problem of ultimate ruin prob-
ability. Scand. Actuarial J., 114-119.
[110] F. De Vylder (1996) Advanced Risk Theory. Editions de 1'Universite de Bruxelles.
[111] F. De Vylder & M. Goovaerts (1984) Bounds for classical ruin probabilities.Insurance: Mathematics and Economics 3, 121-131.
[112] F. De Vylder & M. Goovaerts (1988) Recursive calculation of finite-time ruinprobabilities. Insurance: Mathematics and Economics 7, 1-7.

BIBLIOGRAPHY 369
[113] D.C.M. Dickson (1992) On the distribution of the surplus prior to ruin . Insur-ance : Mathematics and Economics 11, 191-207.
[114] D.C.M. Dickson (1994) An upper bound for the probability of ultimate ruin.Scand. Act. J. 1994 , 131-138.
[115] D.C.M. Dickson (1995) A review of Panjer's recursion formula and its applica-tions. British Actuarial J. 1, 107-124.
[116] D.C.M. Dickson & J.R. Gray (1984) Exact solutions for ruin probability in thepresence of an upper absorbing barrier. Scand. Act. J. 1984 , 174-186.
[117] D.C.M. Dickson & J.R. Gray (1984) Approximations to the ruin probability inthe presence of an upper absorbing barrier. Scand. Act. J. 1984 , 105-115.
[118] D.C.M. Dickson & C. Hipp (1998) Ruin probabilities for Erlang (2) risk processes.Insurance : Mathematics and Economics 22, 251-262.
[119] D.C.M. Dickson & C. Hipp (1999) Ruin problems for phase-type(2) risk pro-cesses . Scand. Act. J. 2000 , 147-167.
[120] D.C.M. Dickson & H.R. Waters (1996 ) Reinsurance and ruin . Insurance: Math-ematics and Economics 19, 61-80.
[121] D.C.M. Dickson & H.R. Waters (1999) Ruin probabilities wih compounding.Insurance: Mathematics and Economics 25, 49-62.
[122] B. Djehiche (1993) A large deviation estimate for ruin probabilities. Scand. Act.
J. 1993 , 42-59.
[123] E. van Doorn & G.J.K. Regterschot (1988) Conditional PASTA. Oper. Res.Letters 7, 229-232.
[124] N.G. Duffield & N. O'Connell (1995) Large deviations and overflow probabilitiesfor the general single-server queue, with applications . Math. Proc. Camb. Philos.
Soc. 118, 363-374.
[125] F. Dufresne & H.U. Gerber (1988) The surpluses immediately before and at ruin,and the amount of claim causing ruin . Insurance : Mathematics and Economics7, 193-199.
[126] F. Dufresne & H.U. Gerber (1991) Risk theory for the compound Poisson processthat is perturbed by a diffusion. Insurance : Mathematics and Economics 10, 51-59.
[127] F. Dufresne, H.U. Gerber & E.S.W. Shiu (1991) Risk theory with the Gammaprocess. Astin Bulletin 21, 177-192.
[128] E.B. Dynkin (1965) Markov Processes I. Springer , Berlin Gottingen Heidelberg.
[129] D .C. Emanuel , J.M. Harrison & A.J. Taylor ( 1975) A diffusion approximationfor the ruin probability with compounding assets. Scand. Act. J. 1975 , 37-45.
[130] P. Embrechts ( 1988). Ruin estimates for large claims . Insurance : Mathematicsand Economics 7, 269-274.
[131] P. Embrechts , J. Grandell & H. Schmidli (1993) Finite-time Lundberg inequal-ities in the Cox case . Scand. Act. J. 1993 , 17-41.

370 BIBLIOGRAPHY
[132] P. Embrechts, R. Griibel & S.M. Pitts (1993) Some applications of the fastFourier transform in insurance mathematics . Statistica Neerlandica 47, 59-75.
[133] P. Embrechts & T. Mikosch (1991). A bootstrap procedure for estimating theadjustment coefficient. Insurance : Mathematics and Economics 10, 181-190.
[134] P. Embrechts, C. Kliippelberg & T. Mikosch (1997) Modelling Extremal Eventsfor Finance and Insurance . Springer, Heidelberg.
[135] P. Embrechts & H. Schmidli (1994) Ruin estimation for a general insurance riskmodel. Adv. Appl. Probab. 26, 404-422.
[136] P. Embrechts & N. Veraverbeke (1982) Estimates for the probability of ruin withspecial emphasis on the possibility of large claims . Insurance : Mathematics andEconomics 1, 55-72.
[137] P. Embrechts & J.A. Villasenor (1988) Ruin estimates for large claims. Insur-
ance : Mathematics and Economics 7, 269-274.
[138] P. Embrechts, J.L. Jensen, M. Maejima & J.L. Teugels (1985). Approximations
for compound Poisson and Polya processes. Adv. Appl. Probab. 17, 623-637.
[139] A.K. Erlang (1909) Sandsynlighedsregning og telefonsamtaler . Nyt Tidsskrift
for Matematik B20, 33-39. Reprinted 1948 as 'The theory of probabilities and
telephone conversations' in The Life and work of A.K. Erlang 2, 131-137. Trans.
Danish Academy Tech. Sci.
[140] J.D. Esary, F. Proschan & D.W. Walkup (1967) Association of random variables,with applications. Ann. Math. Statist . 38, 1466-1474.
[141] F. Esscher (1932) On the probability function in the collective theory of risk.Skand. Akt. Tidsskr. 175-195.
[142] W. Feller (1966) An Introduction to Probability Theory and its Applications I(3nd ed.). Wiley, New York.
[143] W. Feller (1971) An Introduction to Probability Theory and its Applications II(2nd ed.). Wiley, New York.
[144] P.J. Fitzsimmons (1987). On the excursions of Markov processes in classicalduality. Probab. Th. Rel. Fields 75, 159-178.
[145] P. Franken, D. Konig, U. Arndt & V. Schmidt (1982) Queues and Point Pro-
cesses . Wiley.
[146] E.W. Frees (1986) Nonparametric estimation of the probability of ruin. Astin
Bulletin 16, 81-90.
[147] M. Frenz & V. Schmidt (1992) An insensitivity property of ladder height distri-butions. J. Appl. Probab. 29, 616-624.
[148] C.D. Fuh (1997) Corrected ruin probabilities for ruin probabilities in Markovrandom walks. Adv. Appl. Probab. 29, 695-712.
[149] C.D. Fuh & T. Lai (1998) Wald's equations, first passage times and moments
of ladder variables in Markov random walks. J. Appl. Probab. 35, 566-580.
[150] H. Furrer (1998) Risk processes perturbed by a-stable Levy motion. Scand. Act.
J. 1998 , 59-74.

BIBLIOGRAPHY 371
[151] H. Furrer (1996) A note on the convergence of the infinite-time ruin probabilitieswhen the weak approximation is a-stable Levy motion. Unpublished, containedin the authors PhD thesis, ETH Zurich.
[152] H. Furrer, Z. Michna & A. Weron (1997) Stable Levy motion approximation incollective risk theory. Insurance: Mathematics and Economics 20, 97-114.
[153] H. Furrer & H. Schmidli (1994) Exponential inequalities for ruin probabilities ofrisk processes perturbed by diffusion. Insurance: Mathematics and Economics15, 23-36.
[154] H.U. Gerber (1970) An extension of the renewal equation and its application inthe collective theory of risk. Skand. Aktuarietidskrift 1970 , 205-210.
[155] H.U. Gerber (1971) Der Einfluss von Zins auf die Ruinwahrscheinlichkeit. Mitt.Ver. Schweiz. Vers. Math.71, 63-70.
[156] H.U. Gerber (1973) Martingales in risk theory. Mitt. Ver. Schweiz. Vers. Math.73, 205-216.
[157] H.U. Gerber (1979) An Introduction to Mathematical Risk Theory. S.S. HuebnerFoundation Monographs, University of Pennsylvania.
[158] H.U. Gerber (1981) On the probability of ruin in the presence of a linear dividendbarrier. Scand. Act. J. 1981 , 105-115.
[159] H.U. Gerber (1986). Life Insurance Mathematics. Springer.
[160] H.U. Gerber (1988) Mathematical fun with ruin theory. Insurance : Mathematicsand Economics 7, 15-23.
[161] P. Glasserman (1991) Gradient Estimation via Perturbation Analysis. Kluwer,Boston, Dordrecht, London.
[162] P. Glasserman & S.-G. Kou (1995) Limits of first passage times to rare sets inregenerative processes. Ann. Appl. Probab. 5, 424-445.
[163] P.W. Glynn & W. Whitt (1994) Logarithmic asymptotics for steady-state tailprobabilities in a single-server queue. In Studies in Applied Probability (J.Galambos & J. Gani, eds.). J. Appl. Probab. 31A, 131-156.
[164] B.V. Gnedenko & I.N. Kovalenko (1989) Introduction to Queueing Theory (2nded.). Birkhauser , Basel.
[165] M.J. Goovaerts, F. de Vylder & J. Haezendonck (1984) Insurance Premiums.North-Holland, Amsterdam.
[166] M.J. Goovaerts, R. Kaas, A.E. van Heerwarden & T. Bauwelinckx (1990) Effec-tive Actuarial Methods. North-Holland, Amsterdam.
[167] C.M. Goldie & R. Griibel (1996) Perpetuities with thin tails. Adv. Appl. Probab.
28, 463-480.
[168] J. Grandell (1977) A class of approximations of ruin probabilities. Scand. Act.
J., Suppl., 1977, 37-52.
[169] J. Grandell (1978) A remark on 'A class of approximations of ruin probabilities'.Scand. Act. J. 1978 , 77-78.

372 BIBLIOGRAPHY
[170] J. Grandell (1979) Empirical bounds for ruin probabilities. Stoch. Proc. Appl.8,243-255.
[171] J. Grandell (1990) Aspects of Risk Theory. Springer-Verlag.[172] J. Grandell (1992 ) Finite time ruin probabilities and martingales . Informatica
2, 3-32.[173] J. Grandell (1997) Mixed Poisson Processes. Chapman & Hall.[174] J. Grandell (1999) Simple approximations of ruin functions. Preprint, KTH.[175] J. Grandell & C.-O. Segerdahl (1971) A comparison of some approximations of
ruin probabilities . Skand . Aktuar Tidskr. 54, 143-158.[176] B. Grigelionis (1992) On Lundberg inequalities in a Markovian environment.
Proc . Winter School on Stochastic Analysis and Appl .. Akademie-Verlag , Berlin.[177] B. Grigelionis (1993) Two-sided Lundberg inequalities in a Markovian environ-
ment. Liet . Matem . Rink . 33, 30-41.[178] B. Grigelionis (1996) Lundberg-type stochastic processes. Probability Theory
and Mathematical Statistics (I.A. Ibragimov, ed.), 167-176.[179] R. Grnbel (1991) G/G/1 via FFT. Statistical Algorithm 265. Applied Statistics
40, 355-365.
[180] R. Griibel & R. Hermesmeier (1999) Computation of compound distributions I:aliasing errors and exponential tilting . Astin Bulletin 29, 197-214.
[181] D.V. Gusak & V.S. Korolyuk (1969) On the joint distribution of a process withstationary increments and its maximum . Th. Probab . Appl. 14 , 400-409.
[182] A . Gut (1988 ) Stopped Random Walks . Theory and Applications . Springer-Verlag, New York.
[183] M. Gyllenberg & D. Silvestrov (2000) Cram€r-Lundberg approximations fornonlinearly perturbed risk processes . Insurance : Mathematics and Economics26, 75-90.
[184] H . Hadwiger (1940) Uber die Wahrscheinlichkeit des Ruins bei einer grossenZahl von Geschiiften . Archiv v . mathematische Wirtschaft- and Sozialforschung6,131-135.
[185] J.M. Harrison (1977) Ruin problems with compounding assets . Stoch. Proc.Appl. 5 , 67-79.
[186] J.M. Harrison & A.J. Lemoine (1977) Limit theorems for periodic queues. J.Appl. Probab. 14, 566-576.
[187] J.M. Harrison & S.I. Resnick (1976) The stationary distribution and first exitprobabilities of a storage process with general release rule . Math. Opns . Res. 1,347-358.
[188] J. M. Harrison & S.I. Resnick (1977) The recurrence classification of risk andstorage processes . Math . Opns . Res. 3 , 57-66.
[189] A.E. van Heerwarden (1991) Ordering of Risks: Theory and Actuarial Applica-tions . Tinbergen Institute Research Series 20, Amsterdam.

BIBLIOGRAPHY 373
[190] P. Heidelberger (1995) Fast simulation of rare events in queueing and reliabilitymodels. ACM TOMACS 6, 43-85.
[191] W.-R. Heilmann (1987) Grundbegriffe der Risikotheorie. Verlag Ver-sicherungswirtschaft e.V., Karlsruhe.
[192] U. Herkenrath (1986) On the estimation of the adjustment coefficient in risk the-ory by means of stochastic approximation procedures. Insurance: Mathematics
and Economics 5, 305-313.
[193] U. Hermann (1965) Bin Approximationssatz fiir Verteilungen stationarerzufalliger Punktfolgen. Math. Nachrichten 30, 377-381.
[194] 0. Hesselager (1990) Some results on optimal reinsurance in terms of the ad-justment coefficient. Scand. Act. J. 1990 , 80-95.
[195] B.M. Hill (1975) A simple general approach to inference about the tail of adistribution. Ann. Statist. 3, 1163-1174.
[196] C. Hipp (1989a) Efficient estimators for ruin probabilities. Proc. Foruth PragueSymp. on Asymptotic Statistics (P. Mandl & M. Huskova, eds.), 259-268.
[197] C. Hipp (1989b) Estimators and bootstrap confidence intervals for ruin proba-bilities. Astin Bulletin 19, 57-70.
[198] C. Hipp & R. Michel (1990) Risikotheorie: Stochastische Modelle and Statistis-
che Methoden. Versicherungswirtschaft, Karlsruhe.
[199] R.V. Hogg & S.A. Klugman (1984) Loss Distributions. Wiley, New York.[200] M.L. Hogan (1986) Comment on corrected diffusion approximations in certain
random walk problems. J. Appl. Probab. 23, 89-96.
[201] L. Horvath & E. Willekens (1986) Estimates for the probability of ruin starting
with a large initial reserve. Insurance: Mathematics and Economics 5, 285-293.
[202] 0. Haggstrom, S. Asmussen & 0. Nerman (1992) EMPHT - a program for
fitting phase-type distributions. Studies in Statistical Quality Control and Reli-
ability 1992 :4. Mathematical Statistics, Chalmers University of Technology and
the University of Goteborg.
[203] T. Hoglund (1974) Central limit theorems and statistical inference for Markov
chains. Z. Wahrscheinlichkeitsth. verve. Geb. 29, 123-151.
[204] T. Hoglund (1990) An asymptotic expression for the probability of ruin within
finite time. Ann. Probab. 18, 378-389.
[205] T. Hoglund (1991). The ruin problem for finite Markov chains. Ann. Prob. 19,1298-1310.
[206] B. Hojgaard & M. Taksar (2000) Optimal proportional reinsurance policies fordiffusion models. Scand. Act. J. 1998 , 166-180.
[207] D.L. Iglehart (1969) Diffusion approximations in collective risk theory. J. Appl.
Probab. 6, 285-292.
[208] V.B. Iversen & L. Staalhagen (1999) Waiting time distributions in M/D/1 queue-ing systems. Electronic Letters 35, No. 25.

374 BIBLIOGRAPHY
[209] D. Jagerman (1985) Certain Volterra integral equations arising in queueing.Stochastic Models 1, 239-256.
[210] D. Jagerman (1991) Analytical and numerical solution of Volterra integral equa-tions with applications to queues. Manuscript, NEC Research Institute, Prince-ton, N.J.
[211] J. Janssen (1980) Some transient results on the M/SM/1 special semi-Markovmodel in risk and queueing theories. Astin Bull. 11, 41-51.
[212] J. Janssen & J.M. Reinhard (1985) Probabilities de ruine pour une classe demodeles de risque semi-Markoviens. Astin Bull. 15, 123-133.
[213] P.R. Jelenkovic & A.A. Lazar (1998) Subexponential asymptotics of a Markov-modulated random walk with a queueing application. J. Appl. Probab. 35, 325-247.
[214] A. Jensen (1953) A Distribution Model Applicable to Economics. Munksgaard,Copenhagen.
[215] J.L. Jensen (1995) Saddle Point Approximations. Clarendon Press, Oxford.
[216] M. Johnson & M. Taaffe (1989/90) Matching moments to phase distributions.Stochastic Models 5, 711-743; ibid. 6, 259-281; ibid. 6, 283-306.
[217] R. Kaas & M.J. Goovaerts (1986) General bound on ruin probabilities. Insur-ance: Mathematics and Economics 5, 165-167.
[218] V. Kalashnikov (1996) Two-sided bounds of ruin probabilities. Scand. Act. J.
1996, 1-18.
[219] V. Kalashnikov (1997) Geometric Sums: Bounds for Rare Event with Applica-
tions. Kluwer.
[220] V. Kalashnikov (1999) Bounds for ruin probabilities in the presence of largeclaims and their comparison. N. Amer. Act. J. 3, 116-129.
[221] E.P.C. Kao (1988) Computing the phase-type renewal and related functions.Technometrics 30, 87-93.
[222] S. Karlin & H.M. Taylor (1981) A Second Course in Stochastic Processes. Aca-demic Press, New York.
[223] J. Keilson (1966) A limit theorem for passage times in ergodic regenerativeprocesses. Ann. Math. Statist. 37, 866-870.
[224] J. Keilson & D.M.G. Wishart (1964) A central limit theorem for processes de-
fined on a finite Markov chain. Proc. Cambridge Philos. Soc. 60, 547-567.
[225] J. Keilson & D.M.G. Wishart (1964) Boundary problems for additive processesdefined on a finite Markov chain. Proc. Cambridge Philos. Soc. 61, 173-190.
[226] J. Keilson & D.M.G. Wishart (1964). Addenda to for processes defined on afinite Markov chain. Proc. Cambridge Philos. Soc. 63, 187-193.
[227] J.H.B. Kemperman (1961) The Passage Problem for a Markov Chain. Universityof Chicago Press, Chicago.
[228] J. Kennedy (1994) Understanding the Wiener-Hopf factorization for the simplerandom walk. J. Appl. Probab. 31, 561-563.

BIBLIOGRAPHY 375
[229] J.F.C. Kingman (1961) A convexity property of positive matrices . Quart. J.Math. Oxford 12, 283-284.
[230] J.F.C. Kingman (1962) On queues in heavy traffic. Quart. J. Roy. Statist. Soc.
B24, 383-392.
[231] J.F.C. Kingman (1964) A martingale inequality in the theory of queues. Proc.
Camb. Philos. Soc. 60 , 359-361.
[232] C. Kliippelberg (1988) Subexponential distributions and integrated tails. J.Appl. Prob. 25, 132-141.
[233] C. Klnppelberg (1989) Estimation of ruin probabilities by means of hazard rates.Insurance : Mathematics and Economics 8, 279-285.
[234] C. Klnppelberg (1993) Asymptotic ordering of risks and ruin probabilities. In-surance : Mathematics and Economics 12, 259-264.
(235] C. Klnppelberg & T. Mikosch (1995) Explosive Poisson shot noise with appli-cations to risk retention. Bernoulli 1 , 125-147.
[236] C. Klnppelberg & T. Mikosch (1995) Modelling delay in claim settlement. Scand.
Act. J. 1995 , 154-168.
[237] C. Kliippelberg & U. Stadtmiiller (1998) Ruin probabilities in the presence ofheavy-tails and interest rates . Scand. Act. J. 1998 , 49-58.
[238] V.S. Korolyuk, I.P. Penev & A.F. Turbin (1973) An asymptotic expansion forthe absorption time of a Markov chain distribution. Cybernetica 4, 133-135 (inRussian).
[239] H. Kunita (1976) Absolute continuity of Markov processes. Seminaire de Prob-
abilties X . Lecture Notes in Mathematics 511, 44-77. Springer-Verlag.
[240] U. Kuchler & M. Sorensen (1997) Exponential Families of Stochastic Processes.Springer-Verlag.
[241] G. Latouche & V. Ramaswami (1999) Introduction to Matrix-Analytic Methodsin Stochastic Modelling. SIAM.
[242] A.J. Lemoine (1981) On queues with periodic Poisson input. J. Appl. Probab.
18, 889-900.
[243] A.J. Lemoine (1989) Waiting time and workload in queues with periodic Poissoninput. J. Appl. Probab. 26, 390-397.
[244] T. Lehtonen & H. Nyrhinen (1992a) Simulating level-crossing probabilities byimportance sampling. Adv. Appl. Probab. 24, 858-874.
[245] T. Lehtonen & H. Nyrhinen (1992b) On asymptotically efficient simulation ofruin probabilities in a Markovian environment. Scand. Actuarial J., 60-75.
[246] D. Lindley (1952) The theory of queues with a single server. Proc. Cambr. Philos.Soc. 48, 277-289.
[247] L. Lipsky (1992) Queueing Theory - a Linear Algebraic Approach. Macmillan,
New York.
[248] D. Lucantoni (1991) New results on the single server queue with a batch Marko-vian arrival process. Stochastic Models 7, 1-46.

376 BIBLIOGRAPHY
[249] D . Lucantoni , K.S. Meier-Hellstern & M .F. Neuts (1990 ) A single server queuewith server vacations and a class of non-renewal arrival processes . Adv. Appl.Probab. 22, 676-705.
[250] F. Lundberg (1903) I Approximerad Framstdllning av Sannolikhetsfunktionen.II Aterforsdkring av Kollektivrisker . Almqvist & Wiksell, Uppsala.
[251] F. Lundberg (1926) Forsdkringsteknisk Riskutjdmning. F. Englunds BoktryckeriAB, Stockholm.
[252] A.M. Makowski (1994) On an elementary characterization of the increasing con-vex order , with an application . J. Appl. Probab . 31, 834-841.
[253] V. Mammitzsch ( 1986) A note on the adjustment coefficient in ruin theory.Insurance : Mathematics and Economics 5, 147-149.
[254] V .K. Malinovskii (1994) Corrected normal approximation for the probability ofruin within finite time. Scand. Act. J. 1994 , 161-174.
[255] V.K. Malinovskii ( 1996 ) Approximation and upper bounds on probabilities oflarge deviations of ruin within finite time. Scand. Act. J. 1996 , 124-147.
[256] A. Martin-L6f (1983) Entropy estimates for ruin probabilities . Probability andMathematical Statistics (A. Gut & J. Hoist eds.), 29-39.
[257] A. Martin-L3f (1986) Entropy, a useful concept in risk theory. Scand. Act. J.1986 , 223-235.
[258] K .S. Meier ( 1984). A fitting algorithm for Markov-modulated Poisson processeshaving two arrival rates . Europ. J. Opns. Res. 29 , 370-377.
[259] Z . Michna (1998 ) Self-similar processes in collective risk theory. J. Appl. Math.Stoch . Anal. 11 , 429-448.
[260] H .D. Miller ( 1961 ) A convexity property in the theory of random variables de-fined on a finite Markov chain. Ann. Math. Statist . 32, 1261 (0?)-1270.
[261] H .D. Miller (1962) A matrix factorization problem in the theory of randomvariables defined on a finite Markov chain . Proc. Cambridge Philos . Soc. 58,268-285.
[262] H .D. Miller ( 1962 ) Absorption probabilities for sums of random variables definedon a finite Markov chain . Proc. Cambridge Philos. Soc. 58 , 286-298.
[263] M . Miyazawa & V. Schmidt ( 1993) On ladder height distributions of generalrisk processes . Ann. Appl. Probab. 3, 763-776. ,
[264] G.V. Moustakides ( 1999) Extension of Wald 's first lemma to Markov processes.J. Appl. Probab . 36, 48-59.
[265] S.V. Nagaev (1957) Some limit theorems for stationary Markov chains. Th.Probab. Appl. 2, 378-406.
[266] P. Ney & E. Nummelin (1987) Markov additive processes I. Eigenvalue propertiesand limit theorems . Ann. Probab . 15, 561-592.

BIBLIOGRAPHY 377
[267] M .F. Neuts (1977) A versatile Markovian point process . J. Appl. Probab. 16,764-779.
[268] M .F. Neuts ( 1978 ) Renewal processes of phase type . Naval Research LogisticsQuarterly 25, 445-454.
[269] M .F. Neuts ( 1981 ) Matrix-Geometric Solutions in Stochastic Models . Johns Hop-kins University Press, Baltimore . London.
[270] M .F. Neuts ( 1989) Structured Stochastic Matrices of the M/G/1 Type and theirApplications. Marcel Dekker, New York.
[271] M.F. Neuts (1992) Models based on the Markovian arrival process. IEICE Trans.Commun. E75-B , 1255-1265.
[272] J . Neveu (1961 ) Une generalisation des processus a accroisances independantes.Sem. Math. Abh. Hamburg.
[273] R . Norberg ( 1990 ) Risk theory and its statistics environment . Statistics 21,273-299.
[274] H . Nyrhinen (1998 ) Rough descriptions of ruin for a general class of surplusprocesses. Adv. Appl. Probab. 30, 1008-1026.
[275] H. Nyrhinen (1999) Large deviations for the time of ruin. J. Appl. Probab. 36,733-746.
[276] C.A. O'Cinneide (1990) Characterization of phase-type distributions. Stoch.Models 6, 1-57.
[277] J. Ohlin (1969) On a class of measures for dispersion with application to optimalinsurance . Astin Bulletin 5 , 249-266.
[278] E. Omey & E. Willekens (1986) Second order behaviour of the tail of a subor-dinated probability distributions. Stoch. Proc. Appl. 21, 339-353.
[279] E. Omey & E. Willekens (1987) Second order behaviour of distributions subor-dinate to a distribution with finite mean . Stochastic Models 3 , 311-342.
[280] A.G. Pakes (1975) On the tail of waiting time distributions. J. Appl. Probab.12, 555-564.
[281] J. Paulsen (1993) Risk theory in a stochastic economic environment. Stoch. Proc.Appl. 46, 327-361.
[282] J . Paulsen (1998) Sharp conditions for certain ruin in a risk process with stochas-tic return on investments. Stoch. Proc. Appl. 75, 135-148.
[283] J. Paulsen (1998) Ruin theory with compounding assets - a survey. Insurance:Mathematics and Economics 22, 3-16.
[284] J. Paulsen & H.K. Gjessing (1997a) Optimal choice of dividend barriers for arisk process with stochastic return on investments . Insurance : Mathematics andEconomics 20, 215-223.
[285] J. Paulsen & H.K. Gjessing (1997b) Present value distributions with applicationsto ruin theory and stochastic equations. Stoch. Proc. Appl. 71, 123-144.

378 BIBLIOGRAPHY
[286] J. Paulsen & H.K. Gjessing (1997c) Ruin theory with stochastic return on in-vestments. Adv. Appl. Probab. 29, 965-985.
[287] F. Pellerey (1995) On the preservation of some orderings of risks under convo-lution. Insurance: Mathematics and Economics 16, 23-30.
[288] S. Schock Petersen (1989) Calculation of ruin probabilities when the premium
depends on the current reserve. Scand. Act. J. 1989 , 147-159.
[289] C. Philipson (1968) A review of the collective theory of risk. Skand. Aktuar.
Tidskr. 61, 45-68, 117-133.[290] E.J.G. Pitman (1980) Subexponential distribution functions. J. Austr. Math.
Soc. 29A, 337-347.[291] S. Pitts (1994) Nonparametric estimation of compound distributions with ap-
plications in insurance. Ann. Inst. Stat. Math. 46, 537-555.[292] S.M. Pitts, R. Griibel & P. Embrechts (1996) Confidence bounds for the adjust-
ment coefficient. Adv. Appl. Probab. 28, 820-827.
[293] N.U. Prabhu (1961). On the ruin problem of collective risk theory. Ann. Math.
Statist. 32, 757-764.[294] N.U. Prabhu (1965) Queues and Inventories. Wiley.
[295] N.U. Prabhu (1980) Stochastic Storage Processes. Queues, Insurance Risk, and
Dams. Springer, New York, Heidelberg, Berlin.
[296] N.U. Prabhu & Zhu (1989) Markov-modulated queueing systems. Queueing Sys-
tems 5, 215-246.[297] R. Pyke (1959) The supremum and infimum of the Poisson process. Ann. Math.
Statist. 30, 568-576.
[298] V. Ramaswami (1980) The N/G/1 queue and its detailed analysis. Adv. Appl.
Probab. 12, 222-261.
[299] C.M. Ramsay (1984) The asymptotic ruin problem when the healthy and sick
periods form an alternating renewal process. Insurance : Mathematics and Eco-
nomics 3, 139-143.
[300] C.R. Rao (1965 ) Linear Statistical Inference and Its Applications. Wiley.
[301] G.J.K. Regterschot & J.H.A. de Smit (1986) The queue M/G/1 with Markov-modulated arrivals and services . Math. Oper. Res. 11, 465-483.
[302] J.M. Reinhard (1984) On a class of semi-Markov risk models obtained as classical
risk models in a markovian environment . Astin Bulletin XIV, 23-43.
[303] S. Resnick & G. Samorodnitsky (1997) Performance degradation in a single
server exponential queueing model with long range dependence. Opns. Res.,
235-243.
[304] B. Ripley (1987) Stochastic Simulation . Wiley, New York.
[305] C.L.G. Rogers (1994) Fluid models in queueing theory and Wiener-Hopf fac-torisation of Markov chains. Ann. Appl. Probab. 4, 390-413.
[306] T. Rolski (1987) Approximation of periodic queues. J. Appl. Probab . 19, 691-
707.

BIBLIOGRAPHY 379
[307] T. Rolski, H. Schmidli, V. Schmidt & J. Teugels (1999) Stochastic Processes forInsurance and Finance. Wiley.
[308] S.M. Ross (1974) Bounds on the delay distribution in GI/G/1 queues. J. Appi.Probab. 11, 417-421.
[309] H.-J. Rossberg & G--Siegel (1974) Die Bedeutung von Kingmans Integralgle-
ichungen bei der Approximation der stationiiren Wartezeitverteilung im ModellGI/C/1 mit and ohne Verzogerung beim Beginn einer Beschiiftigungsperiode.Math. Operationsforsch. Statist. 5, 687-699.
[310] R.Y. Rubinstein (1981) Simulation and the Monte Carlo Method. Wiley.[311] R.Y. Rubinstein & B. Melamed (1998) Modern Simulation and Modelling. Wiley.[312] R.Y. Rubinstein & A. Shapiro (1993) Discrete Event Systems: Sensitivity Anal-
ysis and Stochastic Optimization via the Score Function Method. Wiley.
[313] M. Rudemo (1973) Point processes generated by transitions of a Markov chain.Adv. Appl. Probab. 5, 262-286.
[314] T. Ryden (1994) Parameter estimation for Markov modulated Poisson processes.Stochastic Models 10, 795-829.
[315] T. Ryden (1996) An EM algorithm for estimation in Markov-modulated Poissonprocesses. Comp. Statist. Data Anal. 21, 431-447
[316] S. Schlegel (1998) Ruin probabilities in perturbed risk models. Insurance: Math-ematics and Economics 22, 93-104.
[317] L. Schmickler (1992 ) MEDA : mixed Erlang distributions as phase-type repre-sentations of empirical distribution functions . Stochastic Models 6, 131-156.
[318] H . Schmidli (1994) Diffusion approximations for a risk process with the possi-bility of borrowing and interest. Stochastic Models 10 , 365-388.
[319] H . Schmidli (1995 ) Cramer-Lundberg approximations for ruin probabilities ofrisk processes perturbed by a diffusion . Insurance: Mathematics and Economics16, 135-149.
[320] H . Schmidli ( 1996) Martingales and insurance risk. Lecture Notes of the 8thSummer School on Probability and Mathematical Statistics (Varna), 155-188.Science Culture Technology Publishing , Singapore.
[321] H . Schmidli ( 1997a) Estimation of the Lundberg coefficient for a Markov mod-ulated risk model . Scand . Act. J. 1997 , 48-57.
[322] H . Schmidli (1997b ) An extension to the renewal theorem and an application inrisk theory. Ann. Appl. Probab . 7, 121-133.
[323] H . Schmidli ( 1999a) On the distribution of the surplus prior and at ruin. AstinBulletin 29, 227-244.
[324] H . Schmidli ( 1999b ) Perturbed risk processes: a review . Th. Stoch. Proc. 5,145-165.
[325] H . Schmidli (2001 ) Optimal proportional reinsurance policies in a dynamic set-ting . Scand. Act. J. 2001 , 40-68.
[326] H.L. Seal ( 1969) The Stochastic Theory of a Risk Business. Wiley.

380 BIBLIOGRAPHY
[327] H.L. Seal (1972) Numerical calculcation of the probability of ruin in the Pois-son/Exponential case . Mitt . Verein Schweiz. Versich . Math . 72, 77-100.
[328] H . L. Seal (1972). Risk teory and the single server queue . Mitt. Verein Schweiz.Versich. Math. 72, 171-178.
[329] H.L. Seal (1974) The numerical calculation of U(w, t), the probability of non-ruin in an interval (0, t). Scand. Act. J. 1974 , 121-139.
[330] H.L. Seal (1978) Survival Probabilities . Wiley, New York.
[331] G.A.F. Seber (1984) Multivariate Observations . Wiley.
[332] C:O. Segerdahl (1942) Uber einige Risikotheoretische Fagestellungen . Skand.Aktuar Tidsskr. 61, 43-83.
[333] C: O. Segerdahl (1955) When does ruin occur in the collective theory of risk?Skand. Aktuar Tidsskr . 1955 , 22-36.
[334] C: O. Segerdahl (1959) A survey of results in the collective theory of risk. In
Probability and statistics - the Harald Cramer volume (ed. Grenander), pp. 279-
299. Almqvist & Wiksell, Stockholm.
[335] B . Sengupta (1989) Markov processes whose steady-state distribution is matrix-geometric with an application to the GI/PH/1 queue. Adv. Appl. Probab. 21,
159-180.
[336] B. Sengupta (1990) The semi-Markov queue: theory and applications. StochasticModels 6, 383-413.
[337] M. Shaked & J.G. Shantikumar (1993) Stochastic Orders and Their Applications.Academic Press.
[338] E.S. Shtatland (1966 ) On the distribution of the maximum of a process withindependent increments. Th. Probab. Appl. 11, 483-487.
[339] A. Shwartz & A. Weiss (1995) Large Deviations for Performance Analysis. Chap-
man & Hall.
[340] E.S.W. Shin (1987) Convolution of uniform distributions and ruin probability.Scand. Act. J. 1987, 191-197.
[341] E.S.W. Shin (1989) Ruin probability by operational calculus. Insurance: Math-
ematics and Economics 8, 243-249.
[342] D. Siegmund (1975) The time until ruin in collective risk theory. Mitteil. Verein
Schweiz Versich. Math. 75, 157-166.
[343] D. Siegmund (1976) Importance sampling in the Monte Carlo study of sequentialtests . Ann. Statist . 4, 673-684.
[344] D. Siegmund (1976) The equivalence of absorbing and reflecting barrier problemsfor stochastically monotone Markov processes . Ann. Probab . 4, 914-924.
[345] D. Siegmund (1979) Corrected diffusion approximations in certain random walkproblems. Adv. Appl. Probab. 11, 701-719.
[346) D . Siegmund ( 1985) Sequential Analysis . Springer-Verlag.
[347] K. Sigman (1992) Light traffic for workload in queues. Queueing Systems 11,. 429-442.
[348] K . Sigman (1994 ) Stationary Marked Point Processes: An Intuitive Approach.Chapman and Hall.

BIBLIOGRAPHY 381
[349] E. Slud & C. Hoesman ( 1989 ) Moderate- and large-deviations probabilities inactuarial risk theory. Adv. Appl. Probab. 21, 725-741.
[350] W .L. Smith ( 1953) Distribution of queueing times. Proc. Cambridge Philos. Soc49, 449-461.
[351] D .A. Stanford & K.J. Stroinski ( 1994) Recursive method for computing finite-time ruin probabilities for phase-distributed claim sizes. Astin Bulletin 24, 235-254.
[352] D. Stoyan (1983) Comparison Methods for Queues and Other Stochastic Models(D.J. Daley ed.). John Wiley & Sons, New York.
[353] E. Straub (1988) Non-Life Insurance Mathematics. Springer, New York.
[354] B . Sundt (1993 ) An Introduction to Non-Life Insurance Mathematics (3rd ed.).Verlag Versicherungswirtschaft e.V., Karlsruhe.
[355] B . Sundt & W.S. Jewell (1981 ) Further results on recursive evaluation of com-pound distributions . Astin Bulletin 12, 27-39.
[356] B . Sundt & J.L. Teugels (1995 ) Ruin estimates under interest force . Insurance:Mathematics and Economics 16, 7-22.
[357] B. Sundt & J.L. Teugels (1997) The adjustment coefficient in ruin estimatesunder interest force . Insurance: Mathematics and Economics 19, 85-94.
[358] R . Suri ( 1989) Perturbation analysis : the state of the art and research issuesexplained via the GI/G/1 queue. Proceeedings of the IEEE 77, 114-137.
[359] L. Takhcs (1967) Combinatorial Methods in the Theory of Stochastic Processes.Wiley.
[360] G.C. Taylor (1976) Use of differential and integral inequalities to bound ruinand queueing probabilities . Scand. Act. J. 1976, 197-208.
[361] G.C. Taylor (1978) Representation and explicit calculation of finite-time ruinprobabilities. Scand. Act. J. 1978, 1-18.
[362] G.C. Taylor (1979) Probability of ruin under inflationary conditions or underexperience ratings . Astin Bulletin 16 , 149-162.
[363] G.C. Taylor (1979) Probability of ruin with variable premium rate . Scand. Act.J. 1980 , 57-76.
[364] G.C. Taylor (1986) Claims reserving in Non-Life Insurance . North-Holland.
[365] J.L. Teugels (1982) Estimation of ruin probabilities . Insurance : Mathematicsand Economics 1, 163-175.
[366] O. Thorin (1974) On the asymptotic behaviour of the ruin probability when theepochs of claims form a renewal process. Scand. Act. J. 1974 , 81-99.
[367] O. Thorin (1977). Ruin probabilities prepared for numerical calculations. Scand.
Actuarial J., 65-102.
[368] O. Thorin (1982) Probabilities of ruin. Scand. Act. J. 1982 , 65-102.[369] O. Thorin (1986) Ruin probabilities when the claim amounts are gamma dis-
tributed. Unpublished manuscript.

382 BIBLIOGRAPHY
[370] 0. Thorin & N. Wikstad (1977) Numerical evaluation of ruin probabilities for afinite period. Astin Bulletin VII, 137-153.
[371] 0. Thorin & N. Wikstad (1977) Calculation of ruin probabilities when the claimdistribution is lognormal. Astin Bulletin IX, 231-246.
[372] H. Thorisson (2000) Coupling, Stationarity and Regeneration. Springer-Verlag.
[373] S. Tacklind (1942) Sur le risque dans les jeux inequitables. Skand. Aktuar. Tid-
skr. 1942, 1-42.
[374] F. Vazquez-Abad (1999) RPA pathwise derivatives of ruin probabilities. Sub-mitted.
[375] N. Veraverbeke (1993) Asymptotic estimates for the probability of ruin in a
Poisson model with diffusion. Insurance : Mathematics and Economics 13, 57-
62.
[376] A. Wald (1947) Sequential Analysis. Wiley.[377] V. Wallace (1969) The solution of quasi birth and death processes arising from
multiple access computer systems. Unpublished Ph. D. thesis, University of
Michigan.
[378] H.R. Waters (1983) Probability of ruin for a risk process with claims cost infla-tion. Scand. Act. J. 1983 , 148-164.
[379] M. Van Wouve, F. De Vylder & M. Goovaerts (1983) The influence of reinsurancelimits on infinite time ruin probabilities. In: Premium Calculation in Insurance(F. De Vylder, M. Goovaerts, J. Haezendonck eds.). Reidel, Dordrecht BostonLancaster.
[380] W. Whitt (1989) An interpolation approximation for the mean workload in a
GI/G/1 queue. Oper. Res. 37, 936-952.
[381] W. Willinger, M. Taqqu, R. Sherman & D. Wilson (1995) Self-similarity in high-speed traffic: analysis and modeling of ethernet traffic measurements. Statistical
Science 10, 67-85.
[382] G.E. Willmot (1994) Refinements and distributional generalizations of Lund-
berg's inequality. Insurance: Mathematics and Economics 15, 49-63.
[383] G.E. Willmot & X. Lin (1994) Lundberg bounds on the tails of compounddistributions. J. Appl. Probab. 31, 743-756.
[384] R.W. Wolff (1990) Stochastic Modeling and the Theory of Queues. Prentice-Hall.

Indexadjustment coefficient 17, 70-79, 93-
96, 97, 170-173, 180-182,201-214 , 308,314-316,328-330,359
aggregate claims 103-106, 189, 316-323
Bessel function 102, 201Brownian motion 3 , 25-26, 40, 117-
128,200-201,269,299,301
central limit theorem 60 , 94-96, 110-113,281,293-294,318-320
change of measure 26-30, 34-36, 38-39,44-47,67-79,98-99,100,111-117,121-129,135,137-141,160-167,178-184,203,283,287-292,307-312
compound Poisson model 4, 11-12,14-15, 24-25, 37, 39, 48-51. 57-96, 97-129, 135, 227-229,242,259-261,285-292,323
Coxian distribution 147, 218Cox process 4, 5, 12Cramer-Lundberg approximation 16-
17, 71-79, 138-139, 162-164,182,203,308
Cramer-Lundberg model: see com-pound Poisson model
cumulative process 334
dams: see storage process
differential equation 16, 245-248, 341,361
diffusion 3, 15, 17, 205, 302-303diffusion approximation 17, 117-127
corrected 121-127duality 13-14, 30-32, 33-34, 141-
144,185-187,272,292-293
Edgeworth expansion 113, 318-319Erlang distribution 7, 86, 217, 226,
360excursion 155-156, 271-274, 278
gamma distribution 6-7, 79, 91, 207
heavy-tailed distribution 6, 14, 17,18-19,251-280
heavy traffic 76, 80-81, 82-83hyperexponential distribution 7, 78-
79,86,150,217,226,228-229,249-250
integral equation 16Lindley 143renewal 64, 74-75, 89, 332-333Volterra 192-194, 248Wiener-Hopf 144
interest rate 190, 196-201
inverse Gaussian distribution 76, 92-93, 119, 122, 301
Kronecker product- and sum 221,
239,249,346-349
383

384
ladder heights 47-56, 61-62, 71, 100,106-108,152-160,227-230,261-264,275-278,336-339
Laplace transform 15, 65, 99, 108-109,123,234,240-244,339
large deviations 129, 203-204, 213-214, 306-316
Levy process 3, 15, 36-39, 57-58,108
life insurance 5, 134, 175
light traffic 81-83Lindley
integral equation 143process 33-34, 142
likelihood ratio : see change of mea-sure
lognormal distribution 9, 251, 257,260
Lundbergconjugation 69-79 , 98-99, 112-
113,128-129,134-135,161-164,178-182,287-291
equation 16, 25, 69-70, 75-76,134-135,161,180,287,315
inequality 17-18, 25, 71-79, 113-114, 138, 162, 203
Markovadditive process 12, 39-47, 52-
53,139-141,148,160-161,171, 178
-modulation 12, 132-133, 145-187,234-240,269-271,304
process 28-30, 38, 39-47, 154,271-274,348
terminating 215-216, 227-228,245
martingale 24-26, 27-30, 35, 39, 42,44,108,161,238,298-299,304-305
INDEX
matrix equation , non-linear 155, 157,230, 234
matrix-exponential distribution 240-244
matrix-exponentials 14, 16, 41, 44-46,218-221,340-350
multiplicative functional 28-30, 35,38, 44, 179
NP approximation 318-320
Palm distribution 52-53, 149, 267-269
Panjer 's recursion 320-323Pareto distribution 9-10, 86periodicity 12, 176-185, 269Perron-Frobenius theory 41-42,349-
350perturbation 172-173, 295; see also
sensitivity analysisphase-type distribution 8, 14, 16,
133,146-148,174,201,215-250,350-361
Poisson processMarkov-modulated 12periodic 12, 176-185non-homogeneous 60
Pollaczeck-Khinchine formula 61-67,80,259-261,285-287
queue 14 , 141-144, 185-187GI/G/1 141-144M/D/1 66-67M/G/1 13, 32, 37, 96, 144, 229M/M/1 101Markov-modulated 185-187periodic 187
random walk 33-36, 59, 133, 137-139,261-264,288-290,297-299,302,336-339

INDEX
rational Laplace transform 8, 222,240; see also matrix-expo-nential distribution
regenerative process 264-268, 280,
292-294, 333-334regular variation 10, 251, 253, 256-
258, 260reinsurance 8, 326-330renewal process 131, 146, 174, 223-
226, 331-336equation 64, 74-75, 89, 332-333model 12, 131-144, 229-234, 261-
264reserve-dependent premiums 14, 189-
214,244-250,279-280Rouche roots 158, 233-234, 238
saddlepoint method 115-117, 123,307-308, 317-318
semi-Markov 147, 162, 335-336sensitivity analysis 86-93, 172-173,
294-296shot-noise process 314simulation 19, 213, 281-296stable process 15, 120statistics x, 11, 12, 18-19, 96-93,
152,314,359-361stochastic control xstochastic ordering 18, 83-86, 168-
172storage process 13, 30-32, 191-192,
279-280subexponential distribution 11, 251-
280
time change 4, 60, 87, 147, 177time-reversion 14, 31, 49-50, 54-55,
107,154-157,186,273-274,338
385
waiting time 141, 186-187virtual : see workload
Weibull distribution 9, 251, 257, 260Wiener-Hopf theory 144, 160, 233,
244,262-263,336-339workload 13, 37, 141-144, 186-187
utility 324, 327

Advanced Series on Statistical Science & Applied Probability - Vol. 2
A . I 1! Ruin Probabilities I 11 l' i | i ,T [Ai l i The book is a comprehensive treatment of JjVb Y j | | I i I \ classical and modern ruin probability theory. Some
i (||l I JL I J r of the topics are Lundberg's inequality, the ^W A l \ i l ' ''' Cramer-Lundberg approximation, exact solutions,
P'i yfliother approximations (e.g. for heavy-tailed claim size distributions), y finite horizon ruin probabilities, extensions of the classical compound
Poisson model to allow for reserve-dependent premiums, Markov-modulation or periodicity. Special features of the book are the emphasis on change of measure techniques, phase-type distributions as a computational vehicle and the connection to other applied probability areas like queueing theory.
"This book is a must for anybody working in applied probability. It is a comprehensive treatment of the known results on ruin probabilities..."
Short Book Reviews
www. worldscientific.com 2779 he
ISBN 981-02-2293-9 mi u inn i nun I I I I I I i in u
9 "789810ll22293211