-
8/9/2019 RT Scheduling
1/68
Scheduling Goal To understand the role that scheduling and
schedulability analysis
plays in predicting that real-time applications meet their
deadlines
Topics Simple process model
The cyclic executive approach Process-based scheduling
Utilization-based schedulability tests Response time analysis for
PS and !" #orst-case execution time
Sporadic and aperiodic processes Process systems $ith " % T
Process interactions& bloc'ing and priority ceiling protocols
(n extendible process model "ynamic systems and on-line analysis
Programming priority-based systems
-
8/9/2019 RT Scheduling
2/68
Scheduling
)n general& a scheduling scheme provides t$o features*
(n algorithm for ordering the use of system resources
+inparticular the ,PUs
( means of predicting the $orst-case behaviour of the system$hen
the scheduling algorithm is applied
The prediction can then be used to confirm the
temporalre.uirements of the application
-
8/9/2019 RT Scheduling
3/68
Simple Process Model
The application is assumed to consist of a fixed set ofprocesses
(ll processes are periodic& $ith 'no$n periodsThe processes are
completely independent of each
other (ll system/s overheads& context-s$itching times and
soon are ignored +i0e& assumed to have zero cost
(ll processes have a deadline e.ual to their period +that
is& each process must complete before it is nextreleased
(ll processes have a fixed $orst-case execution time
-
8/9/2019 RT Scheduling
4/68
Standard Notation
BCDIJNPRT
Ua-z
#orst-case bloc'ing time for the process +if
applicable#orst-case computation time +#,!T of the process"eadline
of the processThe interference time of the processRelease 1itter of
the process2umber of processes in the systemPriority assigned to
the process +if applicable#orst-case response time of the
process3inimum time bet$een process releases +process period
The utilization of each process +e.ual to ,4TThe name of a
process
-
8/9/2019 RT Scheduling
5/68
Cyclic Executives
5ne common $ay of implementing hard real-timesystems is to use a
cyclic executive6ere the design is concurrent but the code is
producedas a collection of procedures
Procedures are mapped onto a set of minor cycles thatconstitute
the complete schedule +or ma1or cycle3inor cycle dictates the
minimum cycle time3a1or cycle dictates the maximum cycle time
Has the advantage of being fully deterministic
Has the advantage of being fully deterministic
-
8/9/2019 RT Scheduling
6/68
Consider Process Set
Process Period ,T ,omputation Time ,C
a 25 10b 25 8
c 50 5 d 50 4 e 100 2
-
8/9/2019 RT Scheduling
7/68
Cyclic Executive
loop wait_fo _i!te "#t$ # oced" e_fo _a$ # oced" e_fo _b$ #
oced" e_fo _c$ wait_fo _i!te "#t$ # oced" e_fo _a$ # oced" e_fo _b$
# oced" e_fo _d$ # oced" e_fo _e$ wait_fo _i!te "#t$ # oced" e_fo
_a$ # oced" e_fo _b$ # oced" e_fo _c$ wait_fo _i!te "#t$ # oced"
e_fo _a$ # oced" e_fo _b$ # oced" e_fo _d$end loop $
-
8/9/2019 RT Scheduling
8/68
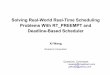
Time-line for Process Set
a b c
Interrupt
a b d
Interrupt
e a b c
Interrupt Interrupt
-
8/9/2019 RT Scheduling
9/68
Properties
2o actual processes exist at run-time7 each minor cycleis 1ust a
se.uence of procedure callsThe procedures share a common address
space andcan thus pass data bet$een themselves0 This data does
not need to be protected +via a semaphore& for
examplebecause concurrent access is not possible (ll 8 process
periods must be a multiple of the minorcycle time
-
8/9/2019 RT Scheduling
10/68
Problems with Cycle Executives
The difficulty of incorporating processes $ith long periods7the
ma1or cycle time is the maximum period that can beaccommodated
$ithout secondary schedulesSporadic activities are difficult
+impossible9 to incorporate
The cyclic executive is difficult to construct and difficult
tomaintain : it is a 2P-hard problem
(ny 8process; $ith a sizable computation time $ill need tobe
split into a fixed number of fixed sized procedures +this
may cut across the structure of the code from a
soft$areengineering perspective& and hence may be
error-prone3ore flexible scheduling methods are difficult to
support"eterminism is not re.uired& but predictability is
-
8/9/2019 RT Scheduling
11/68
Process- ased Scheduling
Scheduling approaches
ixed-Priority Scheduling + PS !arliest "eadline irst +!"
-
8/9/2019 RT Scheduling
12/68
!ixed-Priority Scheduling "!PS#
This is the most $idely used approach and is the mainfocus of
this course !ach process has a fixed& static & priority
$hich iscomputer pre-run-time
The runnable processes are executed in the orderdetermined by
their priority)n real-time systems& the 8priority; of a process
isderived from its temporal re.uirements& not its
importance to the correct functioning of the system or
itsintegrity
-
8/9/2019 RT Scheduling
13/68
Earliest $eadline !irst "E$!# Scheduling
The runnable processes are executed in the orderdetermined by
the absolute deadlines of the processesThe next process to run
being the one $ith the shortest+nearest deadline
(lthough it is usual to 'no$ the relative deadlines ofeach
process +e0g0 >?ms after release & the absolutedeadlines are
computed at run time and hence thescheme is described as
dynamic
-
8/9/2019 RT Scheduling
14/68
%alue- ased Scheduling "% S#
)f a system can become overloaded then the use ofsimple static
priorities or deadlines is not sufficient7 amore adaptive scheme is
neededThis often ta'es the form of assigning a value to each
process and employing an on-line value-basedscheduling algorithm
to decide $hich process to runnext
-
8/9/2019 RT Scheduling
15/68
Preemption and Non-preemption
#ith priority-based scheduling& a high-priority process
maybe released during the execution of a lo$er priority one)n a
preemptive scheme& there $ill be an immediate s$itchto the
higher-priority process#ith non-preemption & the lo$er-priority
process $ill beallo$ed to complete before the other
executesPreemptive schemes enable higher-priority processes to
bemore reactive& and hence they are preferred
(lternative strategies allo$ a lo$er priority process tocontinue
to execute for a bounded timeThese schemes are 'no$n as deferred
preemption orcooperative dispatchingSchemes such as !" and
-
8/9/2019 RT Scheduling
16/68
!PS and &ate Monotonic Priority 'ssignment
!ach process is assigned a +uni.ue priority based onits period7
the shorter the period& the higher the priority)0e& for t$o
processes i and %&
This assignment is optimal in the sense that if anyprocess set
can be scheduled +using pre-emptivepriority-based scheduling $ith a
fixed-priorityassignment scheme& then the given process set
canalso be scheduled $ith a rate monotonic
assignmentscheme2ote& priority @ is the lo$est +least
priority
P j P iT jT i >&P io it7. is
-- eac i!'ta!ce of t e ta') ca! a=e a -- diffe e!t # io it7
entry
e =ice1 &&&.$ entry e =ice2 &&&.$ pragma
P io it7 P i.$end e =e '$
P i i C ili 1 2i
-
8/9/2019 RT Scheduling
44/68
Priority Ceiling 1oc2ing
Protected ob1ects need to maintain the consistency oftheir
data3utual exclusion can be guaranteed by use of thepriority
model
!ach protected ob1ect is assigned a ceiling priority $hichis
greater than or e.ual to the highest priority of any ofits calling
tas's#hen a tas' calls a protected operation& its priority
isimmediately raised to that of the protected ob1ect)f a tas'
$ishing to enter a protected operation isrunning then the protected
ob1ect cannot be alreadyoccupied
C ili 1 2i
-
8/9/2019 RT Scheduling
45/68
Ceiling 1oc2ing
!ach protected ob1ect is assigned a priority using apragma)f the
pragma is missing& P io it7 9a't is assumedP o a>_? o is
raised if the calling tas'/s active
priority is greater than the ceiling)f an interrupt handler is
attached to a protectedoperation and the $rong ceiling priority has
been set&then the program becomes erroneous
#ith ceiling loc'ing& an effective implementation $ill
usethe thread of the calling tas' to execute not only theprotected
operation but also to execute the code of anyother tas's that are
released as a result of the call
E l f C ili P i it
-
8/9/2019 RT Scheduling
46/68
Example of Ceiling Priority
protected @ate_Co!t o( is
pragma P io it7 28.$
entry to#_ !d_C(o'e$
procedure #e!$
private @ate 3 Boo(ea! 3; /a('e$
end @ate_Co!t o($
protected body @ate_Co!t o( is
entry to#_ !d_C(o'e
when @ate is
begin
@ate 3; /a('e$
end; procedure #e! is
begin
@ate 3; T "e$
end $end @ate_Co!t o($
E l
-
8/9/2019 RT Scheduling
47/68
Example
(ssume tas' T& priority >B& calls to#_ !d_C(o'e andis
bloc'ed0 Iater tas' & priority >E& calls #e! 0 Thethread
executing $ill underta'e the follo$ingoperations* the code of #e!
for evaluate the barrier on the entry and note that T can no$
proceed the code to#_ !d_C(o'e for T evaluate the barrier
again
continue $ith the execution of after its call on the
protectedob1ect
There is no context s$itch
' ti P i iti
-
8/9/2019 RT Scheduling
48/68
'ctive Priorities
( tas' entering a protected operation has its priorityraised
( tas' s active priority might also change during*
tas' activation a tas' inherits the active priority of the
parenttas' $hich created it +to avoid priority inversion during a
rendezvous the tas' executing a rendezvous $ill
inherit the active priority of the caller if it is greater than
itscurrent active priority
2ote* no inheritance $hen $aiting for tas' termination
$i t hi g
-
8/9/2019 RT Scheduling
49/68
$ispatching
The order of dispatching is determined by the tas's/active
priorities"efault is preemptive priority based2ot defined exactly
$hat this means on a multi-
processor system5ne policy defined by annex*/I/ _Ait i!_P io
it7#hen a tas' becomes runnable it is placed at the bac'
on the run .ueue for its priority7 $hen it is preempted&
itis placed at the front
E t 3 P li i
-
8/9/2019 RT Scheduling
50/68
Entry 3ueue Policies
( programmer may choose the .ueuing policy for atas'/s entry
.ueue and the select statementT$o predefined policies* /I/ _ "e"i!
+default andP io it7_ "e"i!
#ith P io it7_ "e"i! and the select statement& analternative
that is open and has the highest priority tas'.ueued +of all open
alternatives is chosen)f there are t$o open $ith e.ual priority
tas's& the one$hich appears textually first in the program is
chosenTas's are .ueued in active priority order& if active
prioritychanges then no re.ueuing ta'es place7 if the basepriority
changes& the tas' is removed and re.ueued
$ynamic Priorities
-
8/9/2019 RT Scheduling
51/68
$ynamic Priorities
Some applications re.uire the base priority of a tas' to
change
dynamically* e0g0& mode changes& or to implement
dynamicscheduling schemes such as earliest deadline scheduling
Pac2age Specification
-
8/9/2019 RT Scheduling
52/68
Pac2age Specification
with da&Ta')_Ide!tificatio!$
use da$ package da&D7!a>ic_P io itie' is
procedure et_P io it7 P io it7 3 7'te>& !7_P io it7$ T 3
Ta')_Ide!tificatio!&Ta')_Id 3;
Ta')_Ide!tificatio!&C" e!t_Ta').$
function @et_P io it7 T 3 T_Ide!tificatio!&Ta')_Id3;
Ta')_Ide!tificatio!&C" e!t_Ta').
return 7'te>& !7_P io it7$ -- ai'e Ta')i! _? o if ta') a'
te >i!ated -- Bot ai'e P o a>_? o if a N"((_Ta')_Id i'
#a''ed
private -- !ot '#ecified b7 t e (a! "a eend da&D7!a>ic_P
io itie'$
$ynamic Priorities
-
8/9/2019 RT Scheduling
53/68
$ynamic Priorities
The effect of a change of base priorities should be assoon as
practical but not during an abort deferredoperation and no later
than the next abort completionpoint
,hanging a tas'/s base priority can affect its activepriority
and have an impact on dispatching and .ueuing
P S 4
-
8/9/2019 RT Scheduling
54/68
P.S 4
P5S)N supports priority-based scheduling& and has optionsto
support priority inheritance and ceiling protocolsPriorities may be
set dynamically#ithin the priority-based facilities& there are
four policies*
) 5* a process4thread runs until it completes or it is bloc'ed
Round-Robin* a process4thread runs until it completes or it is
bloc'edor its time .uantum has expired
Sporadic Server* a process4thread runs as a sporadic server
5T6!R* an implementation-defined
or each policy& there is a minimum range of priorities
thatmust be supported7 C> for ) 5 and round-robinThe scheduling
policy can be set on a per process and a perthread basis
P S 4
-
8/9/2019 RT Scheduling
55/68
P.S 4
Threads may be created $ith a system contention option& in
$hich case they compete $ith other systemthreads according to their
policy and priority
(lternatively& threads can be created $ith a
processcontention option $here they must compete $ith otherthreads
+created $ith a process contention in the parentprocess )t is
unspecified ho$ such threads are scheduled relative to
threads in other processes or to threads $ith global
contention
( specific implementation must decide $hich to support
Sporadic Server
-
8/9/2019 RT Scheduling
56/68
Sporadic Server
( sporadic server assigns a limited amount of ,PUcapacity to
handle events& has a replenishment period& abudget& and
t$o prioritiesThe server runs at a high priority $hen it has
somebudget left and a lo$ one $hen its budget is exhausted#hen a
server runs at the high priority& the amount ofexecution time
it consumes is subtracted from its budgetThe amount of budget
consumed is replenished at thetime the server $as activated plus
the replenishmentperiod#hen its budget reaches zero& the
server/s priority is setto the lo$ value
ther !acilities
-
8/9/2019 RT Scheduling
57/68
.ther !acilities
P5S)N allo$s*
priority inheritance to be associated $ith mutexes+priority
protected protocolF ),PP
message .ueues to be priority orderedfunctions for dynamically
getting and setting a thread/sprioritythreads to indicate $hether
their attributes should be
inherited by any child thread they create
&T /ava Threads and Scheduling
-
8/9/2019 RT Scheduling
58/68
&T /ava Threads and Scheduling
There are t$o entities in Real-Time Lava $hich can
bescheduled*
Rea(ti>eT ead' +and No ea#Rea(ti>eT ead'7!?=e!t a!d(e +and
Bo"!d 7!c?=e!t a!d(e
5b1ects $hich are to be scheduled must implement the c ed"(ab(e
interface specify their
E c ed"(i! Pa a>ete '
E Re(ea'ePa a>ete 'E Fe>o 7Pa a>ete '
&eal Time /ava
-
8/9/2019 RT Scheduling
59/68
&eal-Time /ava
Real-Time Lava implementations are re.uired to support atleast
>H real-time priority levels
(s $ith (da and P5S)N& the larger the integer value&
thehigher the priority2on real-time threads are given priority
levels belo$ theminimum real-time priority2ote& scheduling
parameters are bound to threads atthread creation time7 if the
parameter ob1ects are changed&they have an immediate impact on
the associated thread
Ii'e (da and Real-Time P5S)N& Real-Time Lava supportsa
pre-emptive priority-based dispatching policyUnli'e (da and RT
P5S)N& RT Lava does not re.uire apreempted thread to be placed
at the head of the run
.ueue associated $ith its priority level
The Schedulable nterface
-
8/9/2019 RT Scheduling
60/68
The Schedulable nterface
public interface c ed"(ab(e extends %a=a&(a! &R"!!ab(eG
public void addTo/ea'ibi(it7 .$ public void e>o=e/
o>/ea'ibi(it7 .$
public Fe>o 7Pa a>ete ' etFe>o 7Pa a>ete ' .$ public
void 'etFe>o 7Pa a>ete ' Fe>o 7Pa a>ete ' >e>o
7.$
public Re(ea'ePa a>ete ' etRe(ea'ePa a>ete ' .$ public
void 'etRe(ea'ePa a>ete ' Re(ea'ePa a>ete ' e(ea'e.$
public c ed"(i! Pa a>ete ' et c ed"(i! Pa a>ete ' .$
public void 'et c ed"(i! Pa a>ete ' c ed"(i! Pa a>ete ' 'c
ed"(i! .$
public c ed"(e et c ed"(e .$ public void 'et c ed"(e c ed"(e 'c
ed"(e .$
H
Scheduling Parameters
-
8/9/2019 RT Scheduling
61/68
Scheduling Parameters
public abstract class c ed"(i! Pa a>ete 'G public c ed"(i! Pa
a>ete ' .$ H
public class P io it7Pa a>ete ' extends c ed"(i! Pa a>ete
'G
public P io it7Pa a>ete ' int # io it7.$
public int etP io it7 .$ ete 'G
public I>#o ta!cePa a>ete ' int # io it7, int i>#o
ta!ce.$ public int etI>#o ta!ce .$ public void 'etI>#o ta!ce
int i>#o ta!ce.$ &&&
H
&T /ava0 Scheduler
-
8/9/2019 RT Scheduling
62/68
&T /ava0 Scheduler
Real-Time Lava supports a high-level scheduler $hosegoals are*
to decide $hether to admit ne$ schedulable ob1ects according
to the resources available and a feasibility algorithm& and
to set the priority of the schedulable ob1ects according to the
priority assignment algorithm associated $ith the
feasibilityalgorithm
6ence& $hilst (da and Real-Time P5S)N focus on
staticoff-line schedulability analysis& Real-Time Lavaaddresses
more dynamic systems $ith the potential foron-line analysis
The Scheduler
-
8/9/2019 RT Scheduling
63/68
The Scheduler
public abstract class c ed"(eG public c ed"(e .$ protected
abstract void addTo/ea'ibi(it7 c ed"(ab(e '.$ protected abstract
void e>o=e/ o>/ea'ibi(it7 c ed"(ab(e '.$
public abstract boolean i'/ea'ib(e .$
-
8/9/2019 RT Scheduling
64/68
The Scheduler
Thec ed"(e
is an abstract classThe i'/ea'ib(e method considers only the set
ofschedulable ob1ects that have been added to itsfeasibility list
+via the addTo/ea'ibi(it7 and
e>o=e/ o>/ea'ibi(it7 methodsThe method c a! eIf/ea'ib(e
chec's to see if itsset of ob1ects is still feasible if the given
ob1ect has itsrelease and memory parameters changed)f it is&
the parameters are changedStatic methods allo$ the default
scheduler to be .ueriedor setRT Lava does not re.uire an
implementation to providean on-line feasibility algorithm
The Priority Scheduler
-
8/9/2019 RT Scheduling
65/68
The Priority Scheduler
class P io it7 c ed"(e extends c ed"(eG public P io it7 c ed"(e
.
protected void addTo/ea'ibi(it7 c ed"(ab(e '.$ ...
public void fi e c ed"(ab(e c ed"(ab(e 'c ed"(ab(e.$
public int etFa6P io it7 .$ public int etFi!P io it7 .$ public
int etNo >P io it7 .$
public static P io it7 c ed"(e i!'ta!ce .$ &&&H
tandard preemptive priority based scheduling
ther !acilities
-
8/9/2019 RT Scheduling
66/68
.ther !acilities
Priority inheritance and ),,P +called priority
ceilingemulationSupport for aperiodic threads in the form of
processinggroups7 a group of aperiodic threads can be
lin'edtogether and assigned characteristics $hich aid
thefeasibility analysis
Summary
-
8/9/2019 RT Scheduling
67/68
Summary
( scheduling scheme defines an algorithm for resourcesharing and
a means of predicting the $orst-casebehaviour of an application
$hen that form of resourcesharing is used0#ith a cyclic
executive& the application code must bepac'ed into a fixed
number of minor cycles such that thecyclic execution of the
se.uence of minor cycles +thema1or cycle $ill enable all system
deadlines to be metThe cyclic executive approach has ma1or
dra$bac's manyof $hich are solved by priority-based systemsSimple
utilization-based schedulability tests are not exact
Summary
-
8/9/2019 RT Scheduling
68/68
Summary
Response time analysis is flexible and caters for* Periodic and
sporadic processes =loc'ing caused by )P, ,ooperative scheduling
(rbitrary deadlines
Release 1itter ault tolerance 5ffsets
(da& RT P5S)N and RT Lava support preemptive
priority-based scheduling (da and RT P5S)N focus on static
off-line schedulabilityanalysis& RT Lava addresses more dynamic
systems$ith the potential for on-line analysis