Embed Size (px)
Citation preview
TEMPO PROGRAMME MIP 2004
VIKING A EURO-REGIONAL DEPLOYMENT PLAN FOR ROAD ITS BETWEEN NORTHERN GERMANY, DENMARK, FINLAND, SWEDEN AND NORWAY
SPEEDMONITOR 1
VERSION: 4.5, DATE: 2005-04-07
PROJECT CO-FUNDED BY THE EUROPEAN COMMISSION: DG TREN
VIKING Final Report: Speedmonitor 1
Filename: VIKING_2004_D1_3_18_Speedmonitor1.doc.5 Page 2 of 2
1. FORORD Denne rapport er udarbejdet af Center for Trafik og Transport (CTT) på Danmarks Tekniske Universitet (DTU). Rapporten beskriver arbejde gennemført som samarbejde med Vejdirektoratet i Danmark, med delvis finansiering fra EU-programmet VIKING.
Nærværende projekt indeholder det indledende arbejde, som er nødvendigt for en fremtidig grundigere undersøgelse af sammenhængen mellem GPS og spoledata samt anvendelsen af disse to datakilder til samtidig registrering af den trafikale situation på det danske trafikale net. Der er således lagt forholdsvis stor vægt på at opbygge automatiserede procedurer for databehandling, således at denne fase kan overstås med færre udfordringer i fremtidige projekter.
Arbejdet er gennemført og beskrevet af følgende personer på CTT:
Christian Overgaard Hansen
Christian Würtz
Anders Vestergaard Jensen
René Munk Jørgensen
VIKING Final Report: Speedmonitor 1
Filename: VIKING_2004_D1_3_18_Speedmonitor1.doc.5 Page 3 of 2
2. RESUME With the overall purpose of combining loop sensor based data on traffic volumes and travel times with GPS-based data, this project seeks to establish a direct link between the two types of data. Data on traffic volumes and average speed based on loop sensor measurements has been supplied by the Danish Road Administration, and GPS data on the same road network is given from a previous EU project called AKTA.
First data is compared and validated so as to establish a common ground for further analysis. Second issues related to future comparisons are noted. Third conclusions with regards to future usability of GPS based data in traffic monitoring are drawn.
The pre-processing of data shows some inconsistencies with regards to a common digitized road network as well as a few inconsistencies in the supplied data. However given the size of the datasets, it is possible to manually verify data and locate inconsistencies. By combining manual interaction with automated procedures, a common digitized road network has been established with correct placement of loop sensors as well as unique key identifiers linking the datasets from ASTRID with data from AKTA.
Analyses indicate uniformity in the measurements from ASTRID compared to the measurements in AKTA. Overall the conclusion is, that in the examined time period both datasets mirror the actual traffic situation on the freeways in the greater Copenhagen area with a great precision.
The above mentioned analyses start by comparing data aggregated on road segments, which is followed by more detailed analyses on various speed intervals. Again data has been compared with regards to specific time intervals, and a few parts of the freeway network have been considered in greater detail. In all cases the conclusions are consistency between the measurements from both data collection methods.
Examining single trips on part of the freeway (Motorring 3) in a time interval with high congestion resulted again in results, where the difference in travel times between the two datasets was measured in seconds, with no one method yielding the higher travel time in all situations. When examining congestion on Motorring 3, a variance analysis has shown 6.8% higher speeds measured by GPS than by loop sensors with a safety interval of 2%. Based on those results a combination of GPS data and loop sensor data seems to be the most accurate, since the difference of the two methods of measurements is significant in situations with slow moving traffic.
In conclusion an extended use of GPS based data is recommended for future observation of traffic situations on the freeways if the current tendency towards increased congestion continues.
VIKING Final Report: Speedmonitor 1
Filename: VIKING_2004_D1_3_18_Speedmonitor1.doc.5 Page 4 of 2
1. FORORD ............................................................................................................ 2
2. RESUME ............................................................................................................ 3
3. PROJEKT BESKRIVELSE................................................................................. 5 3.1 Baggrund .........................................................................................................................5 3.2 Formål ..............................................................................................................................5
4. DATA VERIFIKATION........................................................................................ 6 4.1 Forarbejdning af data .....................................................................................................6 4.2 Tilknytning af kilometrering til kraks vejnet.................................................................8 4.3 Filtrering og Forberedelse af Data ..............................................................................12
5. DATA SAMMENLIGNING................................................................................ 14 5.1 Motorring 3 ....................................................................................................................22 5.2 Vurdering af placering af spoler..................................................................................25
6. FORSLAG TIL ASTRID.................................................................................... 28
7. FREMTIDIG ANVENDELSE AF GPS-BASERET DATA ................................. 29
8. KONKLUSION.................................................................................................. 30

VIKING Final Report: Speedmonitor 1
Filename: VIKING_2004_D1_3_18_Speedmonitor1.doc.5 Page 5 of 2
3. PROJEKT BESKRIVELSE Overordnet sigter projektet mod at forbedre trafikovervågning og styring på motorvejene i det Storkøbenhavnske område ved kombination af spole data og GPS data, SPEEDMONITOR.
Fokus er på TRIM vejnettet, som dækker 120 km motorveje og ramper i og omkring Storkøbenhavn. Resultaterne vil dog blive udvidet til alle ca. 170 km motorveje i Hovedstadsområdet.
3.1 BAGGRUND Trafikken i TRIM er overvåget ved et omfattende program baseret på induktions spoler. Denne data er behandlet og gemt i ASTRID databasen. Imidlertid er data, der automatisk er blevet indlæst og analyseret i ASTRID, behæftet med unøjagtighed og er i nogen grad upålidelig, idet det tidligere er konstateret ved manuelle tællinger, at spolerne i vejnettet har problemer med at lave korrekte målinger, hvis de passeres med meget lave hastigheder. Dette betyder, at lave hastigheder pga. trængsel ofte er mere estimeret end direkte målt. TRIM data er baseret på snitmålinger og er kun i et begrænset omfang blevet valideret for biler kørende langs længere sektioner af motorvejen.
I AKTA/PROGRESS, et forskningsprojekt under EU’s 5 rammeprogram, er rejsetider fra en vognpark på 500 biler målt vha. GPS over en periode fra september 2001 til august 2002 og ”map-matched” til KRAK geodatabasen. Disse data dækker over alle trafikvejene i Hovedstadsområdet og er anvendt i andre nyere forskningsstudier så som ”Trængselsprojektet”. AKTA data udgør følgelig en billig og solid kilde for validering af rejsetider i ASTRID. Yderlige tillader AKTA, til en hvis grænse, en vurdering af f.eks. forsinkelser på alle motorveje i det Storkøbenhavnske område.
3.2 FORMÅL Hovedformålet med projektet er for TRIM vejnettet at validere rejsetidsdata baseret på spoler med eksisterende rejsetidsinformation indsamlet fra biler med GPS. Andre formål er:
• Forbedre og forfine procedurer i TRIM databasen ASTRID
• Udvide overvågningen af forsinkelser på alle motorveje i det Storkøbenhavnske område
• Planlægge fremtidig brug af GPS-baseret data
Et yderligt formål med projektet er at illustrere, hvordan spole og GPS-baseret data kan kombineres til hastigheds og trængselsmålinger ved at benytte styrkerne i hver type data, og derved kompensere for svagheder ved kun at benytte én data kilde.
VIKING Final Report: Speedmonitor 1
Filename: VIKING_2004_D1_3_18_Speedmonitor1.doc.5 Page 6 of 2
4. DATA VERIFIKATION Dette kapitel indeholder en beskrivelse af de procedurer, som blev gennemgået for at sikre konsistens i data fra de to benyttede datasæt. Til dette formål benyttes det digitale vejkort ”KRAKs Danske Vejnet” som basis for data, hvilket bliver uddybet nærmere i afsnit 4.1. Idet vi har valgt at benytte KRAKs vejnet som den fælles nævner for de to datasæt, har det naturligvis været nødvendigt, at indlægge spolepositioner på dette net, hvorfor afsnit 4.2 giver en beskrivelse af de udfordringer, som lå heri. Det fælles digitale vejkort er desuden fremkommet ved en opsplitningen af veje i vejstykker foretaget ved mindste fælles nævner mellem KRAK og Vejdirektoratets net. Dette er beskrevet i afsnit 4.3.
4.1 FORARBEJDNING AF DATA Vejdirektoratet har leveret koordinater til ASTRID segmenter i et format benyttet af GIS softwaren MapInfo. Dette er blevet konverteret til en geodatabase i ESRI’s filformat, således at softwaren ArcGIS kan benyttes til de efterfølgende analyser. Det er her valgt at benytte ArcGIS formatet, idet dette giver mulighed for at benytte avancerede værktøjer til analyserne. Specifikt er de 2 filer: ”Sektionstabel med KMT til VIS.TAB” og ”Sektionstabel mod KMT til VIS.TAB” konverteret til en geodatabase i koordinatsystemet UTM32 ed50, som er det koordinatsystem, hvor projiceringen af længde-/breddegrader stemmer bedst overens med de faktiske positioner i Danmark.
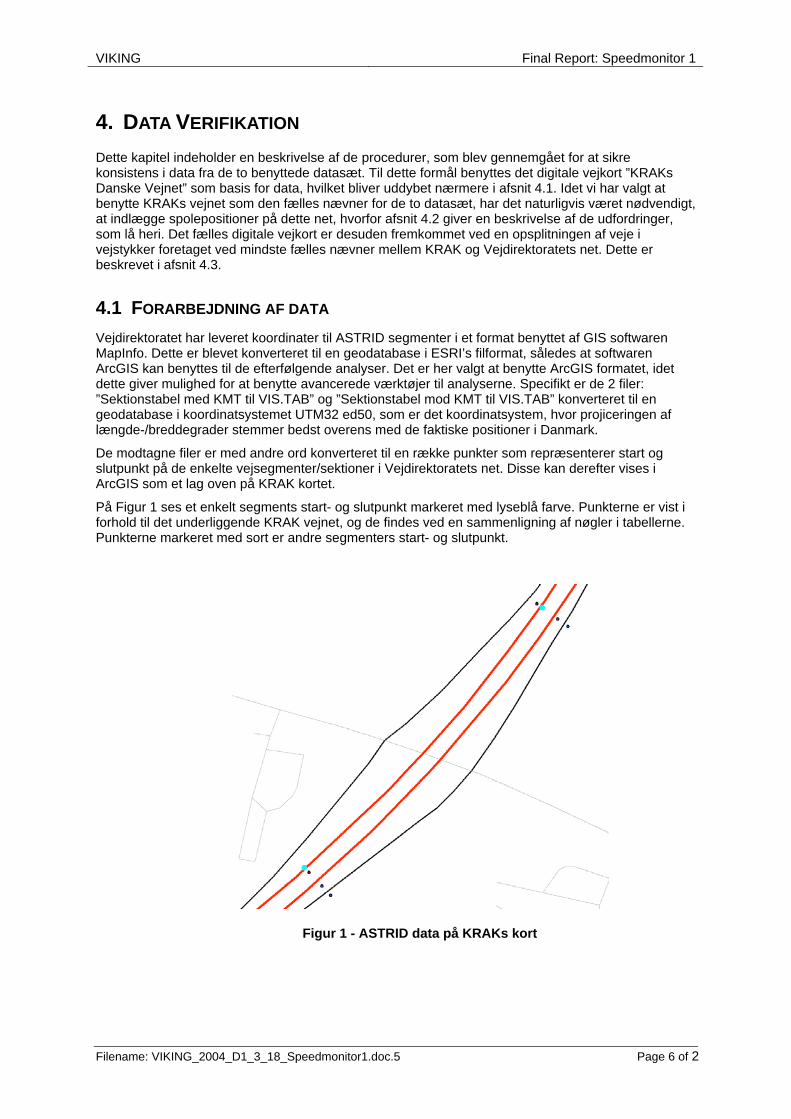
De modtagne filer er med andre ord konverteret til en række punkter som repræsenterer start og slutpunkt på de enkelte vejsegmenter/sektioner i Vejdirektoratets net. Disse kan derefter vises i ArcGIS som et lag oven på KRAK kortet.
På Figur 1 ses et enkelt segments start- og slutpunkt markeret med lyseblå farve. Punkterne er vist i forhold til det underliggende KRAK vejnet, og de findes ved en sammenligning af nøgler i tabellerne. Punkterne markeret med sort er andre segmenters start- og slutpunkt.
Figur 1 - ASTRID data på KRAKs kort
VIKING Final Report: Speedmonitor 1
Filename: VIKING_2004_D1_3_18_Speedmonitor1.doc.5 Page 7 of 2
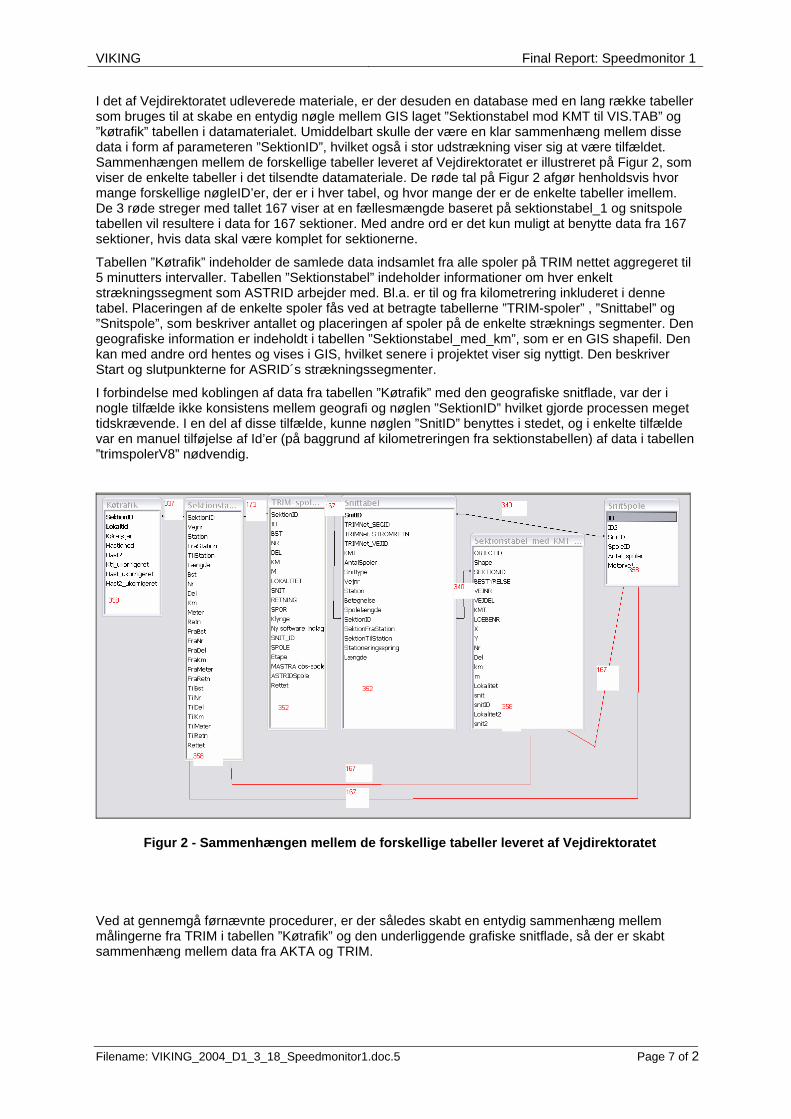
I det af Vejdirektoratet udleverede materiale, er der desuden en database med en lang række tabeller som bruges til at skabe en entydig nøgle mellem GIS laget ”Sektionstabel mod KMT til VIS.TAB” og ”køtrafik” tabellen i datamaterialet. Umiddelbart skulle der være en klar sammenhæng mellem disse data i form af parameteren ”SektionID”, hvilket også i stor udstrækning viser sig at være tilfældet. Sammenhængen mellem de forskellige tabeller leveret af Vejdirektoratet er illustreret på Figur 2, som viser de enkelte tabeller i det tilsendte datamateriale. De røde tal på Figur 2 afgør henholdsvis hvor mange forskellige nøgleID’er, der er i hver tabel, og hvor mange der er de enkelte tabeller imellem. De 3 røde streger med tallet 167 viser at en fællesmængde baseret på sektionstabel_1 og snitspole tabellen vil resultere i data for 167 sektioner. Med andre ord er det kun muligt at benytte data fra 167 sektioner, hvis data skal være komplet for sektionerne.
Tabellen ”Køtrafik” indeholder de samlede data indsamlet fra alle spoler på TRIM nettet aggregeret til 5 minutters intervaller. Tabellen ”Sektionstabel” indeholder informationer om hver enkelt strækningssegment som ASTRID arbejder med. Bl.a. er til og fra kilometrering inkluderet i denne tabel. Placeringen af de enkelte spoler fås ved at betragte tabellerne ”TRIM-spoler” , ”Snittabel” og ”Snitspole”, som beskriver antallet og placeringen af spoler på de enkelte stræknings segmenter. Den geografiske information er indeholdt i tabellen ”Sektionstabel_med_km”, som er en GIS shapefil. Den kan med andre ord hentes og vises i GIS, hvilket senere i projektet viser sig nyttigt. Den beskriver Start og slutpunkterne for ASRID´s strækningssegmenter.
I forbindelse med koblingen af data fra tabellen ”Køtrafik” med den geografiske snitflade, var der i nogle tilfælde ikke konsistens mellem geografi og nøglen ”SektionID” hvilket gjorde processen meget tidskrævende. I en del af disse tilfælde, kunne nøglen ”SnitID” benyttes i stedet, og i enkelte tilfælde var en manuel tilføjelse af Id’er (på baggrund af kilometreringen fra sektionstabellen) af data i tabellen ”trimspolerV8” nødvendig.
Figur 2 - Sammenhængen mellem de forskellige tabeller leveret af Vejdirektoratet
Ved at gennemgå førnævnte procedurer, er der således skabt en entydig sammenhæng mellem målingerne fra TRIM i tabellen ”Køtrafik” og den underliggende grafiske snitflade, så der er skabt sammenhæng mellem data fra AKTA og TRIM.
VIKING Final Report: Speedmonitor 1
Filename: VIKING_2004_D1_3_18_Speedmonitor1.doc.5 Page 8 of 2
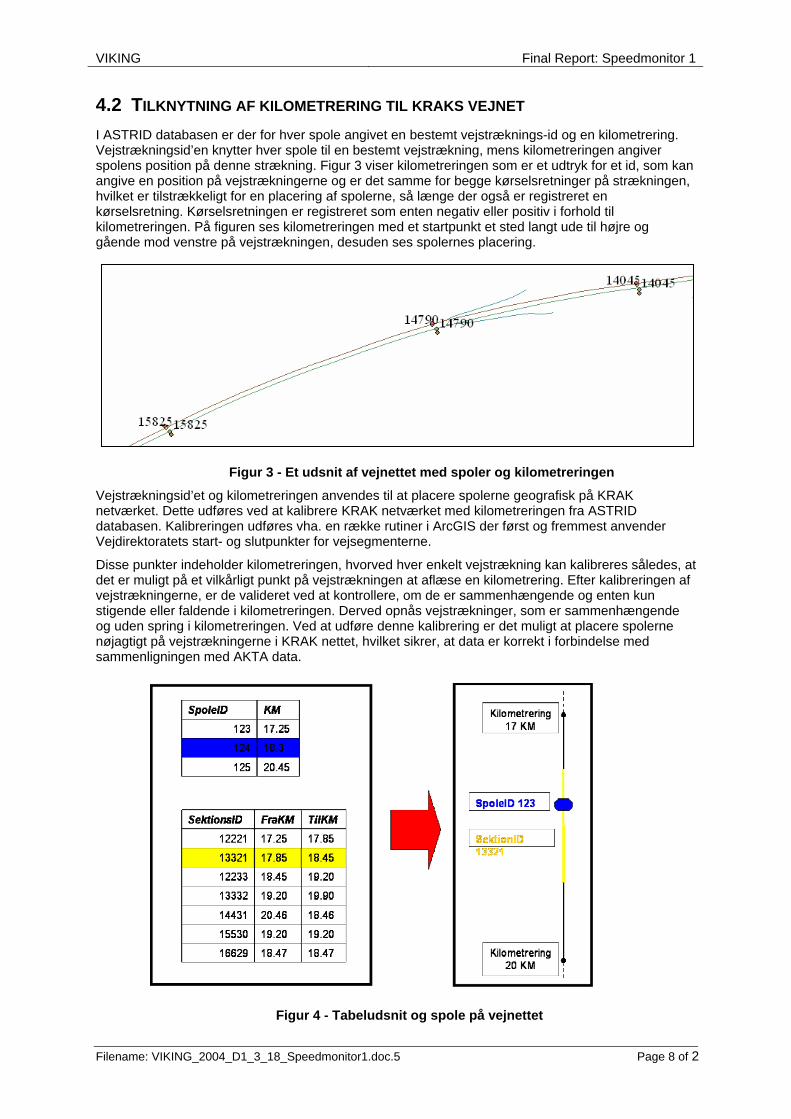
4.2 TILKNYTNING AF KILOMETRERING TIL KRAKS VEJNET I ASTRID databasen er der for hver spole angivet en bestemt vejstræknings-id og en kilometrering. Vejstrækningsid’en knytter hver spole til en bestemt vejstrækning, mens kilometreringen angiver spolens position på denne strækning. Figur 3 viser kilometreringen som er et udtryk for et id, som kan angive en position på vejstrækningerne og er det samme for begge kørselsretninger på strækningen, hvilket er tilstrækkeligt for en placering af spolerne, så længe der også er registreret en kørselsretning. Kørselsretningen er registreret som enten negativ eller positiv i forhold til kilometreringen. På figuren ses kilometreringen med et startpunkt et sted langt ude til højre og gående mod venstre på vejstrækningen, desuden ses spolernes placering.
Vejstrækningsid’et og kilometreringen anvendes til at placere spolerne geografisk på KRAK netværket. Dette udføres ved at kalibrere KRAK netværket med kilometreringen fra ASTRID databasen. Kalibreringen udføres vha. en række rutiner i ArcGIS der først og fremmest anvender Vejdirektoratets start- og slutpunkter for vejsegmenterne.
Disse punkter indeholder kilometreringen, hvorved hver enkelt vejstrækning kan kalibreres således, at det er muligt på et vilkårligt punkt på vejstrækningen at aflæse en kilometrering. Efter kalibreringen af vejstrækningerne, er de valideret ved at kontrollere, om de er sammenhængende og enten kun stigende eller faldende i kilometreringen. Derved opnås vejstrækninger, som er sammenhængende og uden spring i kilometreringen. Ved at udføre denne kalibrering er det muligt at placere spolerne nøjagtigt på vejstrækningerne i KRAK nettet, hvilket sikrer, at data er korrekt i forbindelse med sammenligningen med AKTA data.
Figur 3 - Et udsnit af vejnettet med spoler og kilometreringen
Figur 4 - Tabeludsnit og spole på vejnettet
VIKING Final Report: Speedmonitor 1
Filename: VIKING_2004_D1_3_18_Speedmonitor1.doc.5 Page 9 of 2
Inden sådan en kalibrering er mulig er det nødvendigt at kode en nøgle mellem tabellen for spoleenderne. Når denne nøgle er oprettet er det muligt at udføre kalibreringen af KRAK netværket med kilometreringen fra spoleenderne. Kalibreringen gør det muligt at placere både spolerne og selve spolesegmenterne i KRAK netværket idet de begge indeholder en kilometrering. Figur 4 viser hvorledes der for hver spolesektion haves en fra- og tilkilometrering således at segmentet kan fastsættes på KRAK netværket, hvorefter selve spolens position kan bestemmes.
Ved at udføre denne kalibrering er det muligt at placere spolerne og segmenterne nøjagtigt på vejstrækningerne i KRAK netværket, hvilket sikrer, at data er korrekt i forbindelse med sammenligningen med AKTA data.
En meget stor del af arbejdet i projektet er benyttet til at udvikle denne automatiske procedure for ensretning af data fra begge datakilder. Den udviklede procedure med brug af kilometrering til placering af spoler har den store fordel, at det ikke er nødvendigt at benytte geografisk data til placeringen. Herved er det forholdsvis uproblematisk fremover at placere spoler ved benyttelse af andre datasæt, ligesom samme procedurer kan anvendes til at ensrette datamaterialet i forbindelse med vejstykker.
Det har dog været nødvendigt at foretage en yderligere justering for to specielle vejstrækninger, hvilket vil blive beskrevet nærmere sidst i dette afsnit.
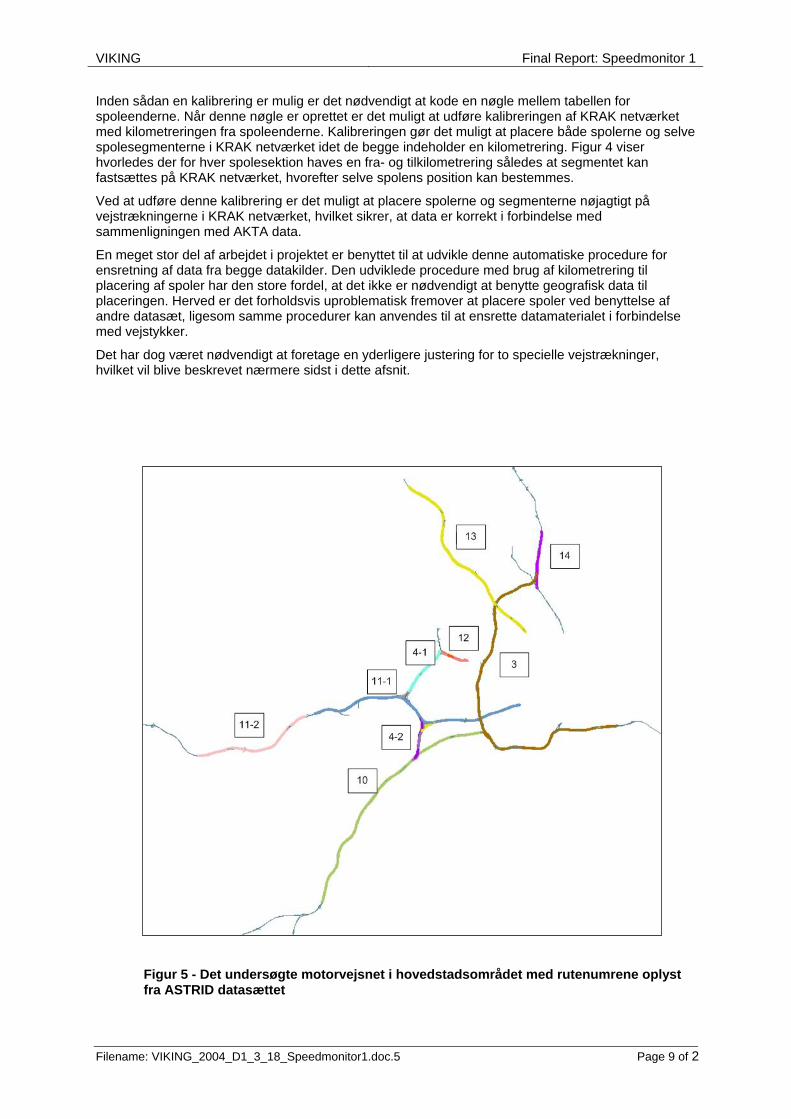
Figur 5 - Det undersøgte motorvejsnet i hovedstadsområdet med rutenumrene oplyst fra ASTRID datasættet
VIKING Final Report: Speedmonitor 1
Filename: VIKING_2004_D1_3_18_Speedmonitor1.doc.5 Page 10 of 2
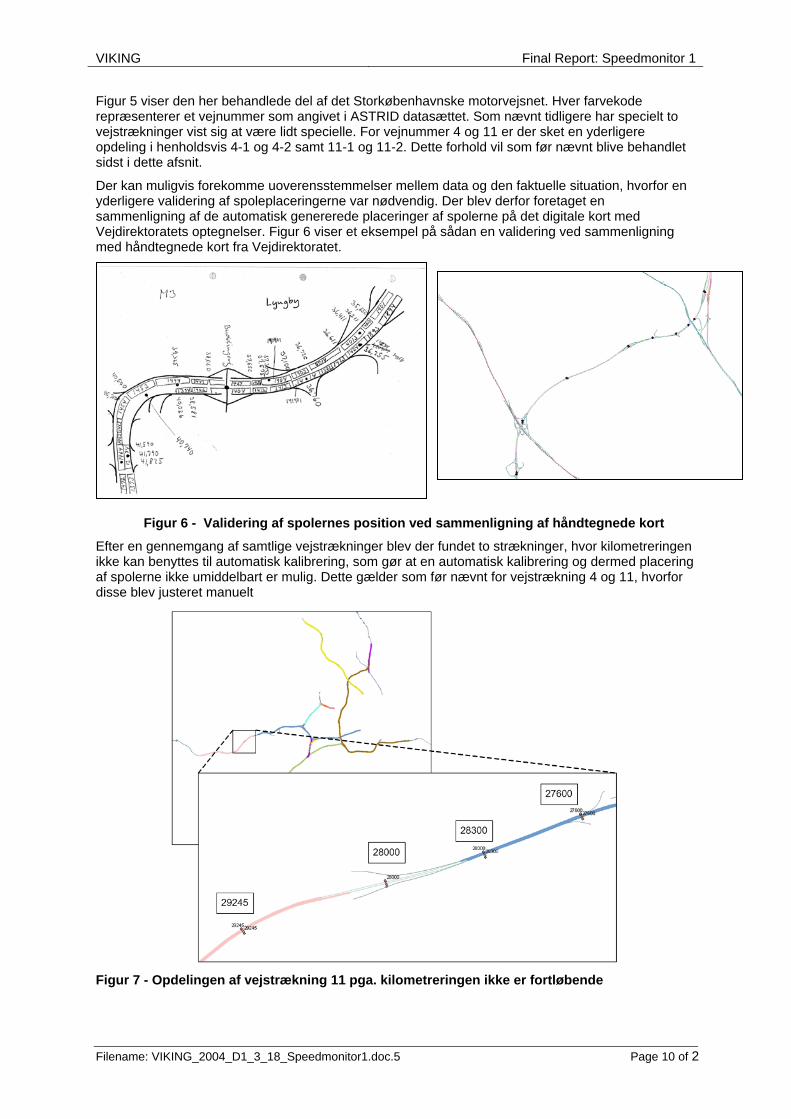
Figur 5 viser den her behandlede del af det Storkøbenhavnske motorvejsnet. Hver farvekode repræsenterer et vejnummer som angivet i ASTRID datasættet. Som nævnt tidligere har specielt to vejstrækninger vist sig at være lidt specielle. For vejnummer 4 og 11 er der sket en yderligere opdeling i henholdsvis 4-1 og 4-2 samt 11-1 og 11-2. Dette forhold vil som før nævnt blive behandlet sidst i dette afsnit.
Der kan muligvis forekomme uoverensstemmelser mellem data og den faktuelle situation, hvorfor en yderligere validering af spoleplaceringerne var nødvendig. Der blev derfor foretaget en sammenligning af de automatisk genererede placeringer af spolerne på det digitale kort med Vejdirektoratets optegnelser. Figur 6 viser et eksempel på sådan en validering ved sammenligning med håndtegnede kort fra Vejdirektoratet.
Figur 6 - Validering af spolernes position ved sammenligning af håndtegnede kort
Efter en gennemgang af samtlige vejstrækninger blev der fundet to strækninger, hvor kilometreringen ikke kan benyttes til automatisk kalibrering, som gør at en automatisk kalibrering og dermed placering af spolerne ikke umiddelbart er mulig. Dette gælder som før nævnt for vejstrækning 4 og 11, hvorfor disse blev justeret manuelt
Figur 7 - Opdelingen af vejstrækning 11 pga. kilometreringen ikke er fortløbende

VIKING Final Report: Speedmonitor 1
Filename: VIKING_2004_D1_3_18_Speedmonitor1.doc.5 Page 11 of 2
For vejnummer 11 har det været nødvendigt at foretage en opdeling i to mindre segmenter. Dette skyldes, at kilometreringen ikke er fortløbende på en måde, som den automatiske procedure kan genkende.
Figur 7 viser kilometreringen på strækningen, hvor den ikke i forhold til den automatiske kalibrering er fortløbende. Som der kan ses på figuren er der et spring i kilometreringen mellem 29 245 km og 27 600 km. For at kilometreringen skal kunne anvendes til automatisk kalibrering skal den være enten stigende eller faldende, og ikke som i dette hvor der ikke er konsistens i kilometreringen. Den umiddelbare løsning med at droppe de mellemliggende kilometreringstal (28 000 km og 28 300 km) i kalibreringen vil ikke løse problemet, da afstanden målt ved hjælp af ArcGIS, mellem kilometrering 29 245 km og 27 600 km ikke svarer til differencen mellem dem. Derfor er den eneste løsning på problemet at opdele strækningen i to mindre segmenter.
Figur 8 - Opdeling af rute 4 pga. skift i retningen midt på vejstrækning
For vejnummer 4 har det også været nødvendigt at opsplitte vejstrækningen i to mindre segmenter. Problemet med vejstrækning 4 er, at retningen skifter midt på strækningen og derfor kan der ikke skabes en sammenhængende vejstrækning. Der er på baggrund af dette oprettet to mindre segmenter. Figur 8 viser opdelingen af vejstrækning 4, hvor pilene angiver retningen på vejstykkerne. Det ses af pilene, at retningen skifter et sted mellem de med grøn og blå farve angivne vejstykker. Dette skift i retning har således nødvendiggjort en opdeling i mindre vejstykker.
Efter disse to justeringer af vejnummer 4 og 11 er det nu muligt at følge den normale procedure for automatisk kalibrering, og en placering af spolerne på vejstrækningerne kan gennemføres uden yderligere komplikationer. Det bemærkes, at kilometreringen ikke generelt kan opfattes som absolut i forbindelse med afstand og sted, idet der kan opstå uregelmæssigheder i kilometreringen ved udbygning af vejnettet. Vejnumrene 4 og 11 er netop eksempler på sådanne uregelmæssigheder.
Arbejdet med udnyttelsen af kilometrering til ensretning af data og placering af spoler, kan virke uforholdsmæssigt omfattende set i forhold til en simpel geografisk placering af spolerne, men det skal hertil bemærkes, at det således fremover vil være ganske simpelt at flytte eller tilføje sektioner eller spoler. Til dette arbejde vil det således kun være nødvendigt at indlæse en tabel med ”Id”, ”frakilometrering” samt ”tilkilometrering”, hvorefter den geografiske sammenhæng automatisk skabes.
VIKING Final Report: Speedmonitor 1
Filename: VIKING_2004_D1_3_18_Speedmonitor1.doc.5 Page 12 of 2
4.3 FILTRERING OG FORBEREDELSE AF DATA Inden en egentlig sammenligning af de to datasæt kan lade sig gøre er det nødvendigt at data fra de to datasæt er fordelt på et fælles sammenhængende vejnet. Oprindeligt bestod de to datasæt af segmenter af forskellige vejnet som både varierede i geografisk placering (hvilket er løst ved brug af kalibreringsproceduren beskrevet i afsnit 4.2) og forskellige segment længder. For at kunne sammenlægge de 2 data kilder uden tab af data præcision blev der udviklet en procedure, som kan splitte segmenterne op således at de to datasæt beskriver data på de samme segmenter. Den nye
strækningsopdeling er skabt ved at benytte den mindst mulige fællesnævner for de to datasæt.
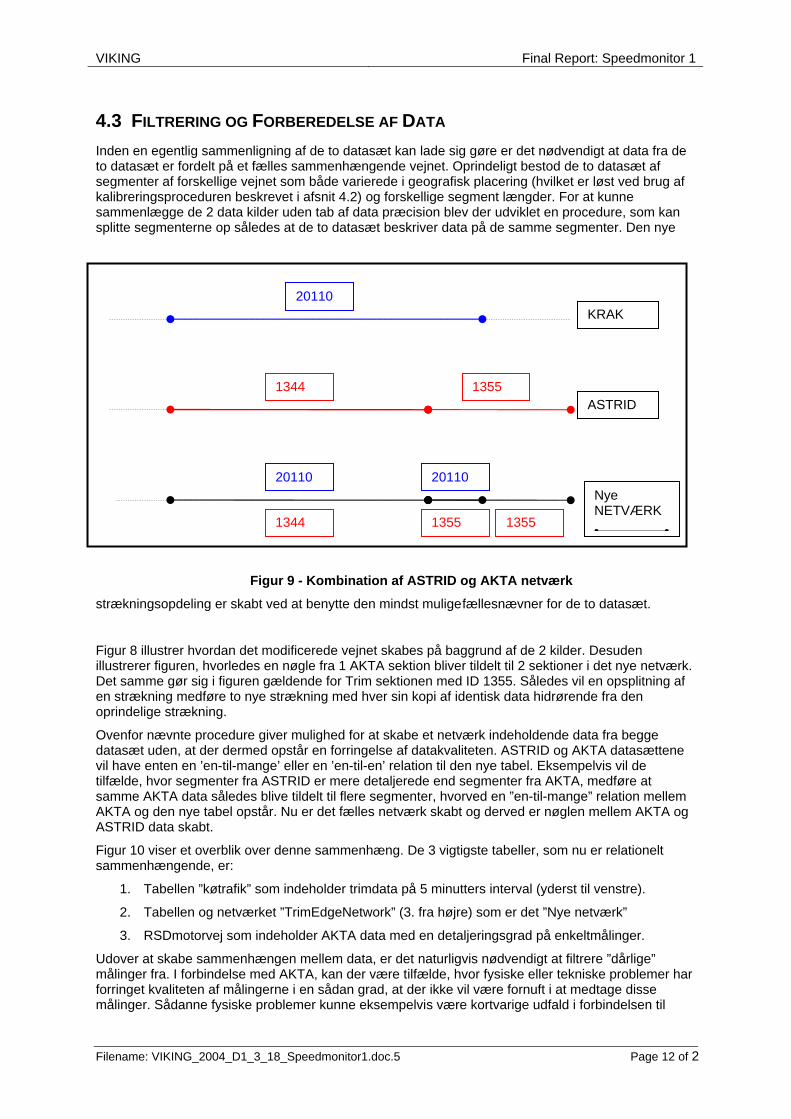
Figur 8 illustrer hvordan det modificerede vejnet skabes på baggrund af de 2 kilder. Desuden illustrerer figuren, hvorledes en nøgle fra 1 AKTA sektion bliver tildelt til 2 sektioner i det nye netværk. Det samme gør sig i figuren gældende for Trim sektionen med ID 1355. Således vil en opsplitning af en strækning medføre to nye strækning med hver sin kopi af identisk data hidrørende fra den oprindelige strækning.
Ovenfor nævnte procedure giver mulighed for at skabe et netværk indeholdende data fra begge datasæt uden, at der dermed opstår en forringelse af datakvaliteten. ASTRID og AKTA datasættene vil have enten en ’en-til-mange’ eller en ’en-til-en’ relation til den nye tabel. Eksempelvis vil de tilfælde, hvor segmenter fra ASTRID er mere detaljerede end segmenter fra AKTA, medføre at samme AKTA data således blive tildelt til flere segmenter, hvorved en ”en-til-mange” relation mellem AKTA og den nye tabel opstår. Nu er det fælles netværk skabt og derved er nøglen mellem AKTA og ASTRID data skabt.
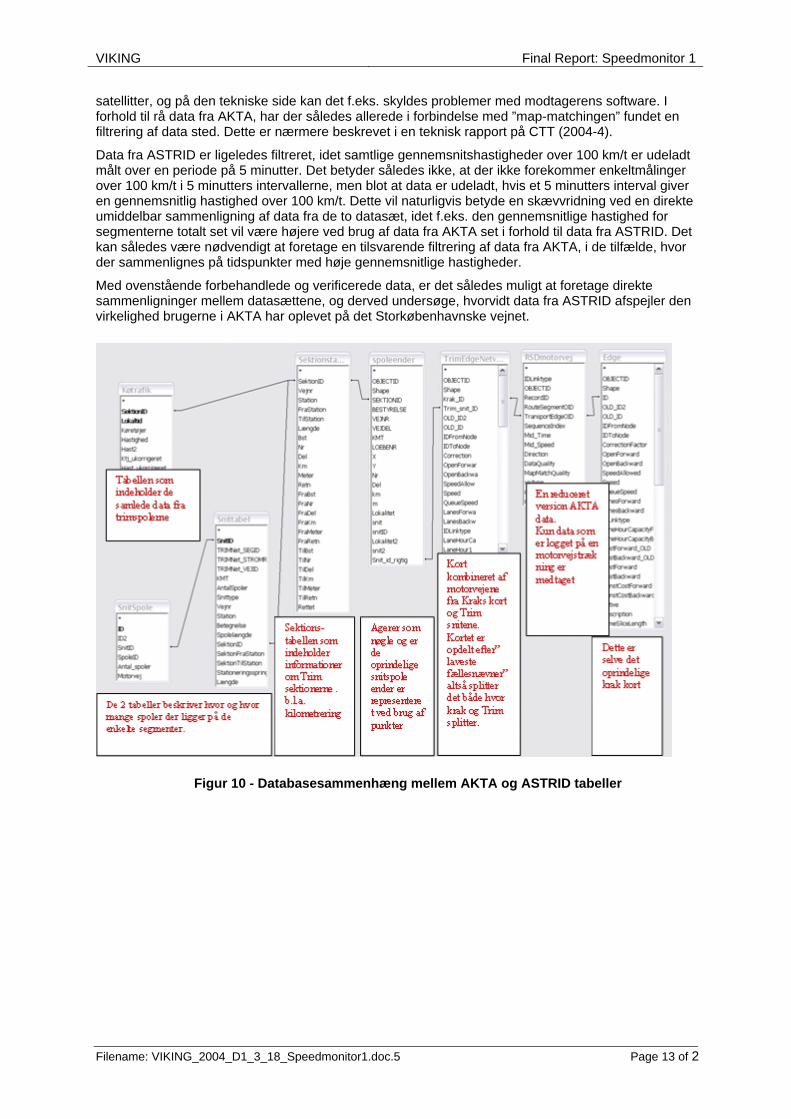
Figur 10 viser et overblik over denne sammenhæng. De 3 vigtigste tabeller, som nu er relationelt sammenhængende, er:
1. Tabellen ”køtrafik” som indeholder trimdata på 5 minutters interval (yderst til venstre).
2. Tabellen og netværket ”TrimEdgeNetwork” (3. fra højre) som er det ”Nye netværk”
3. RSDmotorvej som indeholder AKTA data med en detaljeringsgrad på enkeltmålinger.
Udover at skabe sammenhængen mellem data, er det naturligvis nødvendigt at filtrere ”dårlige” målinger fra. I forbindelse med AKTA, kan der være tilfælde, hvor fysiske eller tekniske problemer har forringet kvaliteten af målingerne i en sådan grad, at der ikke vil være fornuft i at medtage disse målinger. Sådanne fysiske problemer kunne eksempelvis være kortvarige udfald i forbindelsen til
KRAK
ASTRID
Nye NETVÆRK
20110
1344 1355
1344 1355 1355
20110 20110
Figur 9 - Kombination af ASTRID og AKTA netværk
VIKING Final Report: Speedmonitor 1
Filename: VIKING_2004_D1_3_18_Speedmonitor1.doc.5 Page 13 of 2
satellitter, og på den tekniske side kan det f.eks. skyldes problemer med modtagerens software. I forhold til rå data fra AKTA, har der således allerede i forbindelse med ”map-matchingen” fundet en filtrering af data sted. Dette er nærmere beskrevet i en teknisk rapport på CTT (2004-4).
Data fra ASTRID er ligeledes filtreret, idet samtlige gennemsnitshastigheder over 100 km/t er udeladt målt over en periode på 5 minutter. Det betyder således ikke, at der ikke forekommer enkeltmålinger over 100 km/t i 5 minutters intervallerne, men blot at data er udeladt, hvis et 5 minutters interval giver en gennemsnitlig hastighed over 100 km/t. Dette vil naturligvis betyde en skævvridning ved en direkte umiddelbar sammenligning af data fra de to datasæt, idet f.eks. den gennemsnitlige hastighed for segmenterne totalt set vil være højere ved brug af data fra AKTA set i forhold til data fra ASTRID. Det kan således være nødvendigt at foretage en tilsvarende filtrering af data fra AKTA, i de tilfælde, hvor der sammenlignes på tidspunkter med høje gennemsnitlige hastigheder.
Med ovenstående forbehandlede og verificerede data, er det således muligt at foretage direkte sammenligninger mellem datasættene, og derved undersøge, hvorvidt data fra ASTRID afspejler den virkelighed brugerne i AKTA har oplevet på det Storkøbenhavnske vejnet.
Figur 10 - Databasesammenhæng mellem AKTA og ASTRID tabeller
VIKING Final Report: Speedmonitor 1
Filename: VIKING_2004_D1_3_18_Speedmonitor1.doc.5 Page 14 of 2
5. DATA SAMMENLIGNING Det er valgt at sammenligne data fra perioden 1. januar 2001 til 1. maj 2002. Vejdirektoratet har udleveret data for en længere periode, hvor det dog viste sig, at de resterende kun var opgjort på snitmiddelhastighed og ikke strækningsmiddelhastighed. Da det var målet at beregne hovedparten af resultaterne med begge metoder, idet hver metoder har forskellige kvaliteter, er det her valgt at medtage data, hvor begge metoder til beregning af gennemsnitlige hastigheder er angivet. Idet den her behandlede periode dog er forholdsvis lang, burde det ikke få nogen videre betydning for de efterfølgende analyser, at data på hver side af perioden er udeladt.
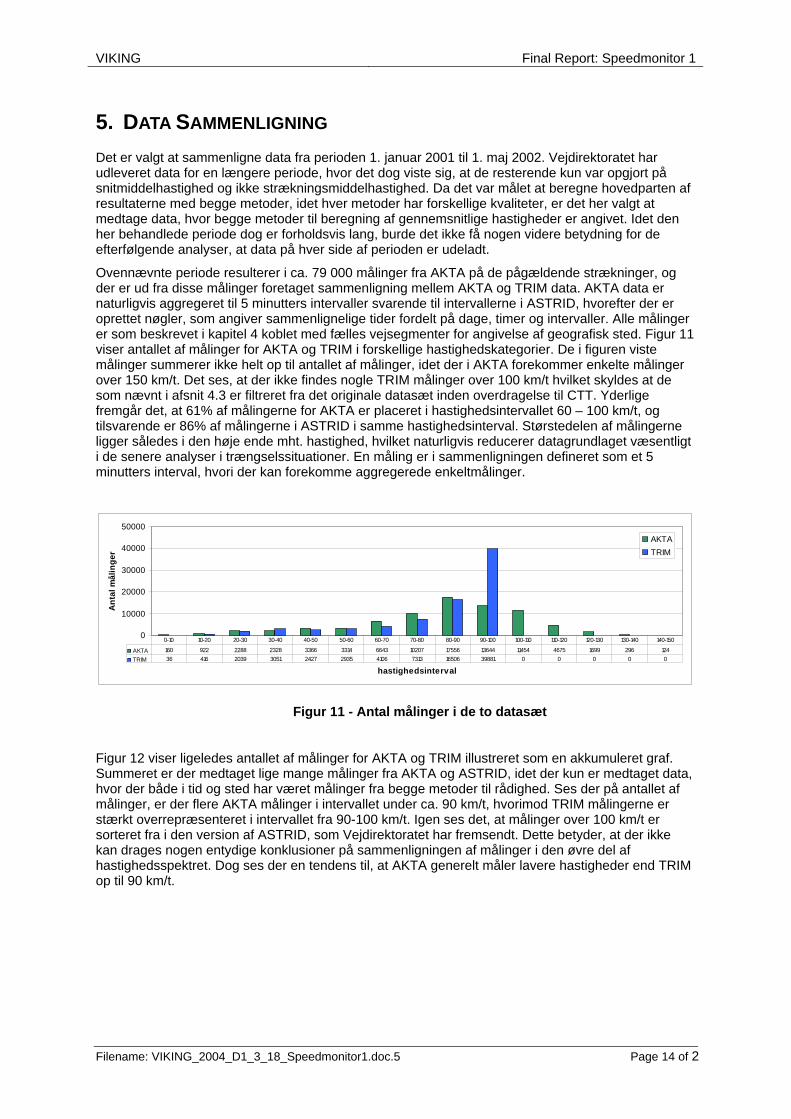
Ovennævnte periode resulterer i ca. 79 000 målinger fra AKTA på de pågældende strækninger, og der er ud fra disse målinger foretaget sammenligning mellem AKTA og TRIM data. AKTA data er naturligvis aggregeret til 5 minutters intervaller svarende til intervallerne i ASTRID, hvorefter der er oprettet nøgler, som angiver sammenlignelige tider fordelt på dage, timer og intervaller. Alle målinger er som beskrevet i kapitel 4 koblet med fælles vejsegmenter for angivelse af geografisk sted. Figur 11 viser antallet af målinger for AKTA og TRIM i forskellige hastighedskategorier. De i figuren viste målinger summerer ikke helt op til antallet af målinger, idet der i AKTA forekommer enkelte målinger over 150 km/t. Det ses, at der ikke findes nogle TRIM målinger over 100 km/t hvilket skyldes at de som nævnt i afsnit 4.3 er filtreret fra det originale datasæt inden overdragelse til CTT. Yderlige fremgår det, at 61% af målingerne for AKTA er placeret i hastighedsintervallet 60 – 100 km/t, og tilsvarende er 86% af målingerne i ASTRID i samme hastighedsinterval. Størstedelen af målingerne ligger således i den høje ende mht. hastighed, hvilket naturligvis reducerer datagrundlaget væsentligt i de senere analyser i trængselssituationer. En måling er i sammenligningen defineret som et 5 minutters interval, hvori der kan forekomme aggregerede enkeltmålinger.
0
10000
20000
30000
40000
50000
hastighedsinterval
Ant
al m
ålin
ger
AKTATRIM
AKTA 160 922 2288 2328 3366 3314 6643 10207 17556 13644 11454 4675 1699 296 124TRIM 36 416 2039 3051 2427 2935 4106 7313 16506 39881 0 0 0 0 0
0-10 10-20 20-30 30-40 40-50 50-60 60-70 70-80 80-90 90-100 100-110 110-120 120-130 130-140 140-150
Figur 11 - Antal målinger i de to datasæt
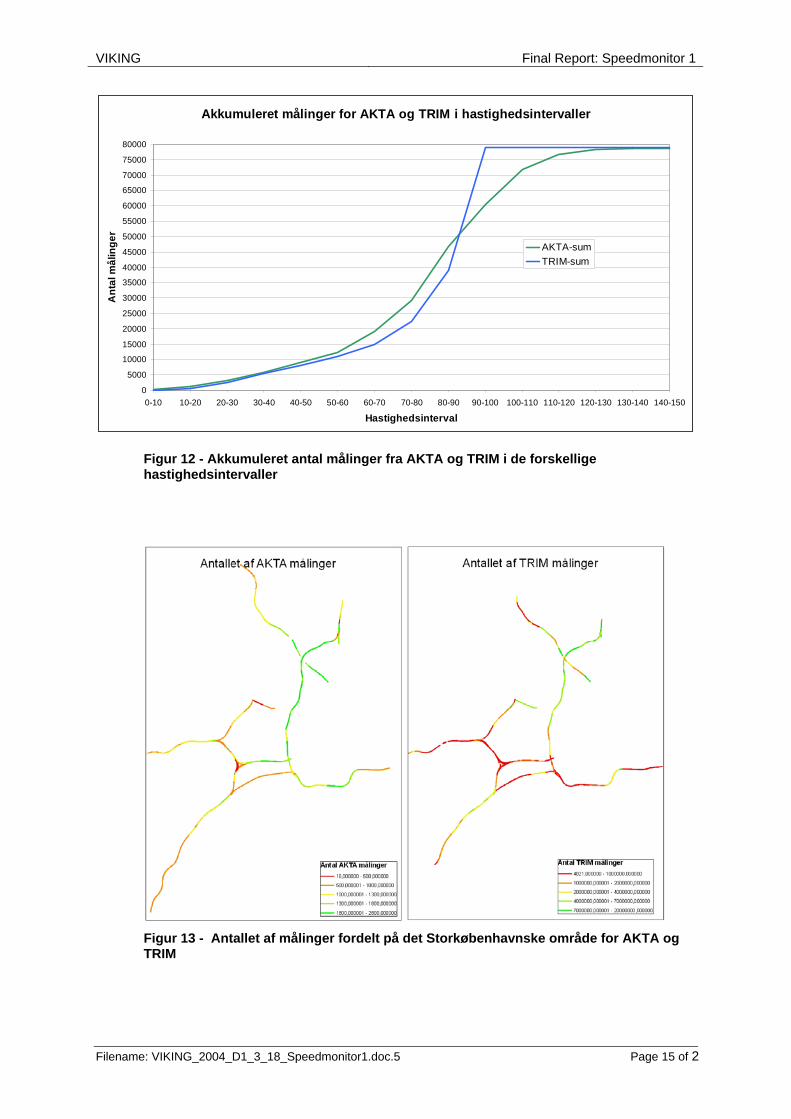
Figur 12 viser ligeledes antallet af målinger for AKTA og TRIM illustreret som en akkumuleret graf. Summeret er der medtaget lige mange målinger fra AKTA og ASTRID, idet der kun er medtaget data, hvor der både i tid og sted har været målinger fra begge metoder til rådighed. Ses der på antallet af målinger, er der flere AKTA målinger i intervallet under ca. 90 km/t, hvorimod TRIM målingerne er stærkt overrepræsenteret i intervallet fra 90-100 km/t. Igen ses det, at målinger over 100 km/t er sorteret fra i den version af ASTRID, som Vejdirektoratet har fremsendt. Dette betyder, at der ikke kan drages nogen entydige konklusioner på sammenligningen af målinger i den øvre del af hastighedsspektret. Dog ses der en tendens til, at AKTA generelt måler lavere hastigheder end TRIM op til 90 km/t.
VIKING Final Report: Speedmonitor 1
Filename: VIKING_2004_D1_3_18_Speedmonitor1.doc.5 Page 15 of 2
Akkumuleret målinger for AKTA og TRIM i hastighedsintervaller
0
5000
10000
15000
20000
25000
30000
35000
40000
45000
50000
55000
60000
65000
70000
75000
80000
0-10 10-20 20-30 30-40 40-50 50-60 60-70 70-80 80-90 90-100 100-110 110-120 120-130 130-140 140-150
Hastighedsinterval
Ant
al m
ålin
ger
AKTA-sumTRIM-sum
Figur 12 - Akkumuleret antal målinger fra AKTA og TRIM i de forskellige hastighedsintervaller
Figur 13 - Antallet af målinger fordelt på det Storkøbenhavnske område for AKTA og TRIM
VIKING Final Report: Speedmonitor 1
Filename: VIKING_2004_D1_3_18_Speedmonitor1.doc.5 Page 16 of 2
Figur 13 viser antallet af målinger fordelt geografisk på det undersøgte Storkøbenhavnske område, hvor få målinger er angivet med rød farve gående mod den grønne farve, som beskriver forholdsmæssigt mange målinger. Det bemærkes igen, at figurerne ikke siger noget om sammenligneligheden af målingerne fra AKTA og TRIM, idet antallet af AKTA målinger er væsentligt mindre end antallet af målinger fra TRIM. Der ses, at for både AKTA og TRIM er der forholdsvis mange målinger på motorring 3, hvilket gør strækningen velegnet til en nærmere analyse, hvilket vil blive beskrevet i afsnit 5.1.
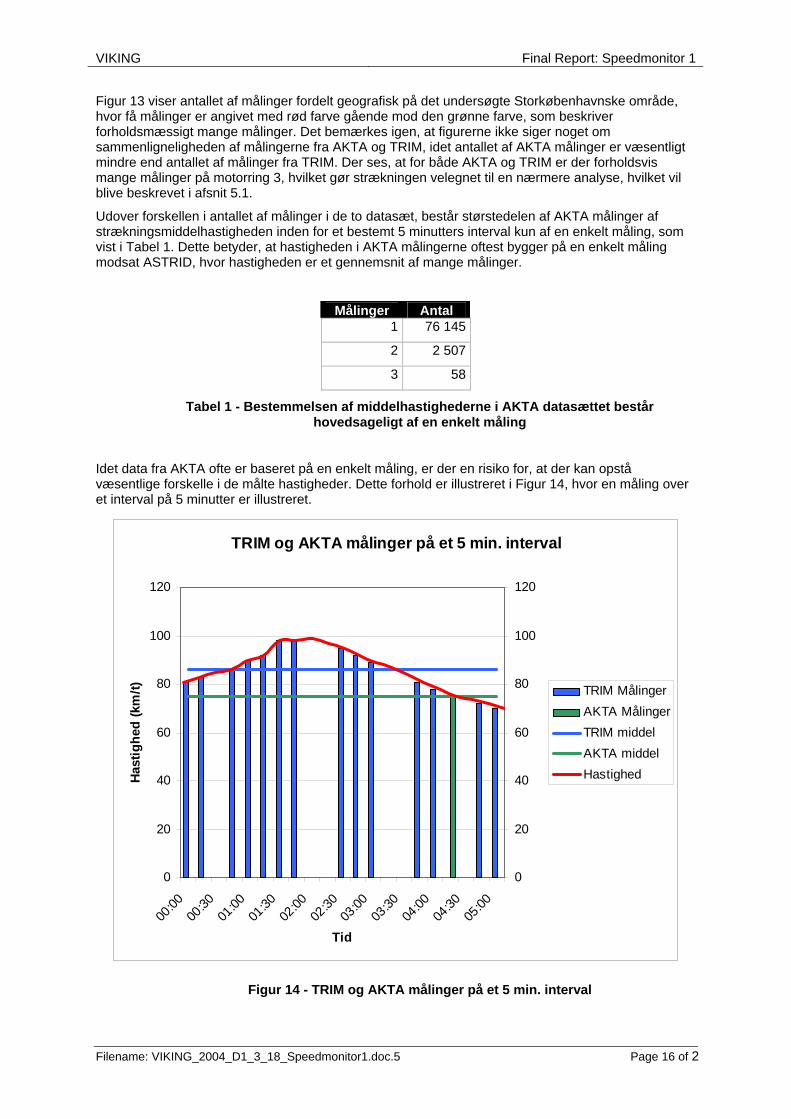
Udover forskellen i antallet af målinger i de to datasæt, består størstedelen af AKTA målinger af strækningsmiddelhastigheden inden for et bestemt 5 minutters interval kun af en enkelt måling, som vist i Tabel 1. Dette betyder, at hastigheden i AKTA målingerne oftest bygger på en enkelt måling modsat ASTRID, hvor hastigheden er et gennemsnit af mange målinger.
Målinger Antal 1 76 145
2 2 507
3 58
Tabel 1 - Bestemmelsen af middelhastighederne i AKTA datasættet består hovedsageligt af en enkelt måling
Idet data fra AKTA ofte er baseret på en enkelt måling, er der en risiko for, at der kan opstå væsentlige forskelle i de målte hastigheder. Dette forhold er illustreret i Figur 14, hvor en måling over et interval på 5 minutter er illustreret.
TRIM og AKTA målinger på et 5 min. interval
0
20
40
60
80
100
120
00:00
00:30
01:00
01:30
02:00
02:30
03:00
03:30
04:00
04:30
05:00
Tid
Hast
ighe
d (k
m/t)
0
20
40
60
80
100
120
TRIM MålingerAKTA MålingerTRIM middelAKTA middelHastighed
Figur 14 - TRIM og AKTA målinger på et 5 min. interval
VIKING Final Report: Speedmonitor 1
Filename: VIKING_2004_D1_3_18_Speedmonitor1.doc.5 Page 17 of 2
Figur 14 viser et eksempel på, hvordan forskellen i gennemsnitshastigheder ved en måling foretaget på et vejsegment over en 5 minutters periode kan opstå. Der ses, at der er foretaget mange målinger med TRIM, idet dette system måler på samtlige biler, som passerer den til vejsegmentet tilknyttede spole. I dette tilfælde har AKTA således kun en enkelt måling. Da hastigheden kan variere meget på de 5 minutter som udgør intervallet, i dette tilfælde fra 70 km/t til 99 km/t, kan der være forskel på hvilken middel hastighed de to målemetoder måler. Herved opstår et gab mellem AKTA og TRIM hastigheder på trods af, at begge metoder måler hastigheden for biler korrekt. Denne effekt forventes at være størst ved trængsel, idet en pludseligt opstået kø, eller bare valg af spor kan have stor effekt.
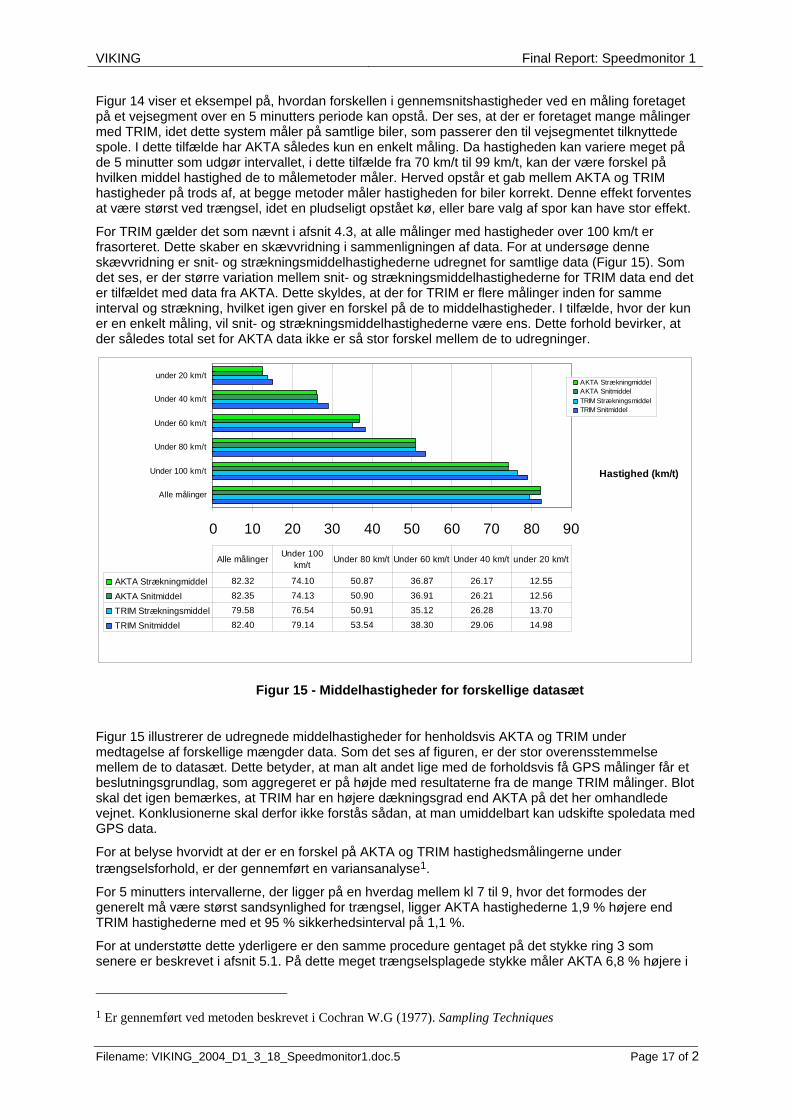
For TRIM gælder det som nævnt i afsnit 4.3, at alle målinger med hastigheder over 100 km/t er frasorteret. Dette skaber en skævvridning i sammenligningen af data. For at undersøge denne skævvridning er snit- og strækningsmiddelhastighederne udregnet for samtlige data (Figur 15). Som det ses, er der større variation mellem snit- og strækningsmiddelhastighederne for TRIM data end det er tilfældet med data fra AKTA. Dette skyldes, at der for TRIM er flere målinger inden for samme interval og strækning, hvilket igen giver en forskel på de to middelhastigheder. I tilfælde, hvor der kun er en enkelt måling, vil snit- og strækningsmiddelhastighederne være ens. Dette forhold bevirker, at der således total set for AKTA data ikke er så stor forskel mellem de to udregninger.
0 10 20 30 40 50 60 70 80 90
Alle målinger
Under 100 km/t
Under 80 km/t
Under 60 km/t
Under 40 km/t
under 20 km/t
Hastighed (km/t)
AKTA StrækningmiddelAKTA SnitmiddelTRIM StrækningsmiddelTRIM Snitmiddel
AKTA Strækningmiddel 82.32 74.10 50.87 36.87 26.17 12.55
AKTA Snitmiddel 82.35 74.13 50.90 36.91 26.21 12.56
TRIM Strækningsmiddel 79.58 76.54 50.91 35.12 26.28 13.70
TRIM Snitmiddel 82.40 79.14 53.54 38.30 29.06 14.98
Alle målinger Under 100 km/t Under 80 km/t Under 60 km/t Under 40 km/t under 20 km/t
Figur 15 - Middelhastigheder for forskellige datasæt
Figur 15 illustrerer de udregnede middelhastigheder for henholdsvis AKTA og TRIM under medtagelse af forskellige mængder data. Som det ses af figuren, er der stor overensstemmelse mellem de to datasæt. Dette betyder, at man alt andet lige med de forholdsvis få GPS målinger får et beslutningsgrundlag, som aggregeret er på højde med resultaterne fra de mange TRIM målinger. Blot skal det igen bemærkes, at TRIM har en højere dækningsgrad end AKTA på det her omhandlede vejnet. Konklusionerne skal derfor ikke forstås sådan, at man umiddelbart kan udskifte spoledata med GPS data.
For at belyse hvorvidt at der er en forskel på AKTA og TRIM hastighedsmålingerne under trængselsforhold, er der gennemført en variansanalyse1.
For 5 minutters intervallerne, der ligger på en hverdag mellem kl 7 til 9, hvor det formodes der generelt må være størst sandsynlighed for trængsel, ligger AKTA hastighederne 1,9 % højere end TRIM hastighederne med et 95 % sikkerhedsinterval på 1,1 %.
For at understøtte dette yderligere er den samme procedure gentaget på det stykke ring 3 som senere er beskrevet i afsnit 5.1. På dette meget trængselsplagede stykke måler AKTA 6,8 % højere i
1 Er gennemført ved metoden beskrevet i Cochran W.G (1977). Sampling Techniques
VIKING Final Report: Speedmonitor 1
Filename: VIKING_2004_D1_3_18_Speedmonitor1.doc.5 Page 18 of 2
samme tidsintervaller med et sikkerheds interval på 2,0 %. Denne analyse viser, at Trim generelt måler mindre hastigheder end AKTA når det gælder trængselssituationer.
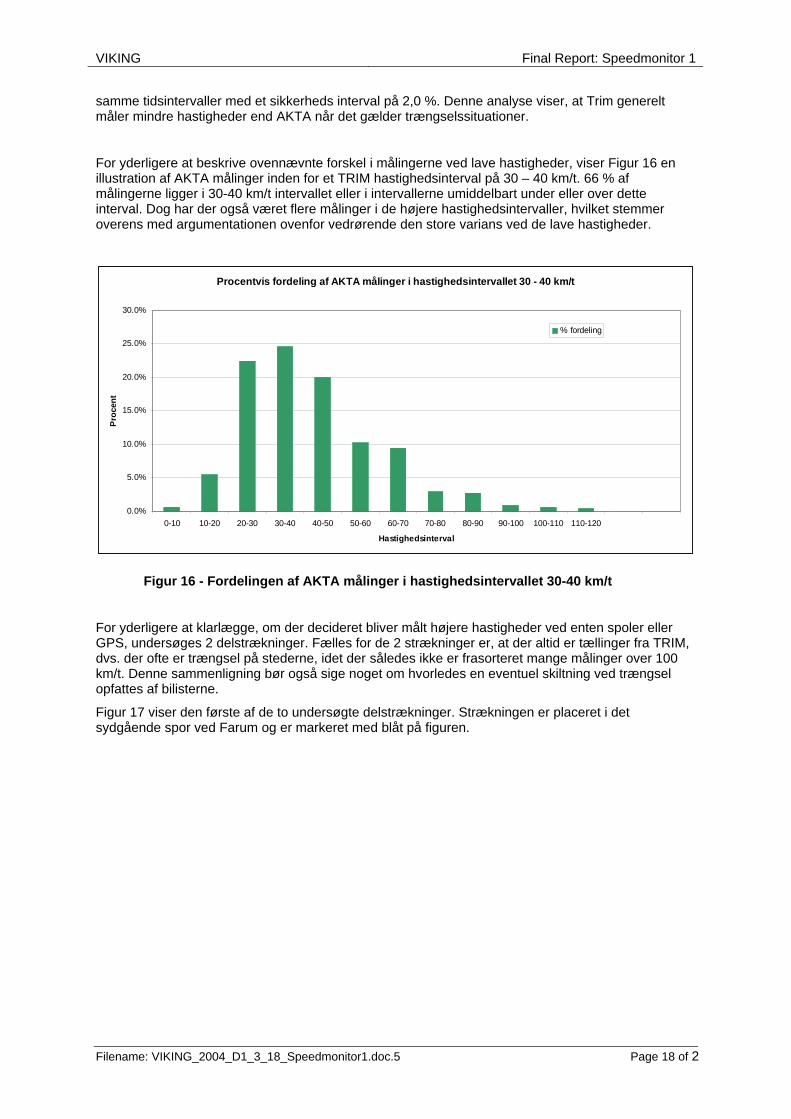
For yderligere at beskrive ovennævnte forskel i målingerne ved lave hastigheder, viser Figur 16 en illustration af AKTA målinger inden for et TRIM hastighedsinterval på 30 – 40 km/t. 66 % af målingerne ligger i 30-40 km/t intervallet eller i intervallerne umiddelbart under eller over dette interval. Dog har der også været flere målinger i de højere hastighedsintervaller, hvilket stemmer overens med argumentationen ovenfor vedrørende den store varians ved de lave hastigheder.
Procentvis fordeling af AKTA målinger i hastighedsintervallet 30 - 40 km/t
0.0%
5.0%
10.0%
15.0%
20.0%
25.0%
30.0%
0-10 10-20 20-30 30-40 40-50 50-60 60-70 70-80 80-90 90-100 100-110 110-120
Hastighedsinterval
Proc
ent
% fordeling
Figur 16 - Fordelingen af AKTA målinger i hastighedsintervallet 30-40 km/t
For yderligere at klarlægge, om der decideret bliver målt højere hastigheder ved enten spoler eller GPS, undersøges 2 delstrækninger. Fælles for de 2 strækninger er, at der altid er tællinger fra TRIM, dvs. der ofte er trængsel på stederne, idet der således ikke er frasorteret mange målinger over 100 km/t. Denne sammenligning bør også sige noget om hvorledes en eventuel skiltning ved trængsel opfattes af bilisterne.
Figur 17 viser den første af de to undersøgte delstrækninger. Strækningen er placeret i det sydgående spor ved Farum og er markeret med blåt på figuren.
VIKING Final Report: Speedmonitor 1
Filename: VIKING_2004_D1_3_18_Speedmonitor1.doc.5 Page 19 of 2
Figur 17 - Delstrækning ved Farum i sydgående retning
Analysen er foretaget ved at tage alle TRIM målinger med gennemsnitshastigheder under henholdsvis 80, 60 og 40 km/t, hvorefter der sammenlignes med målingerne fra AKTA. Idet AKTA målingerne opfattes som reelle ture på strækningen, viser sammenligningen, hvorledes at bilisterne har oplevet hastigheden set i forhold til rapporteringen fra TRIM. Det bemærkes, at de efterfølgende illustrationer ikke har som formål at understøtte de statistiske resultater, men blot skal illustrere, hvordan målinger fra AKTA fordeler sig i konkrete tilfælde set i forhold til TRIM.
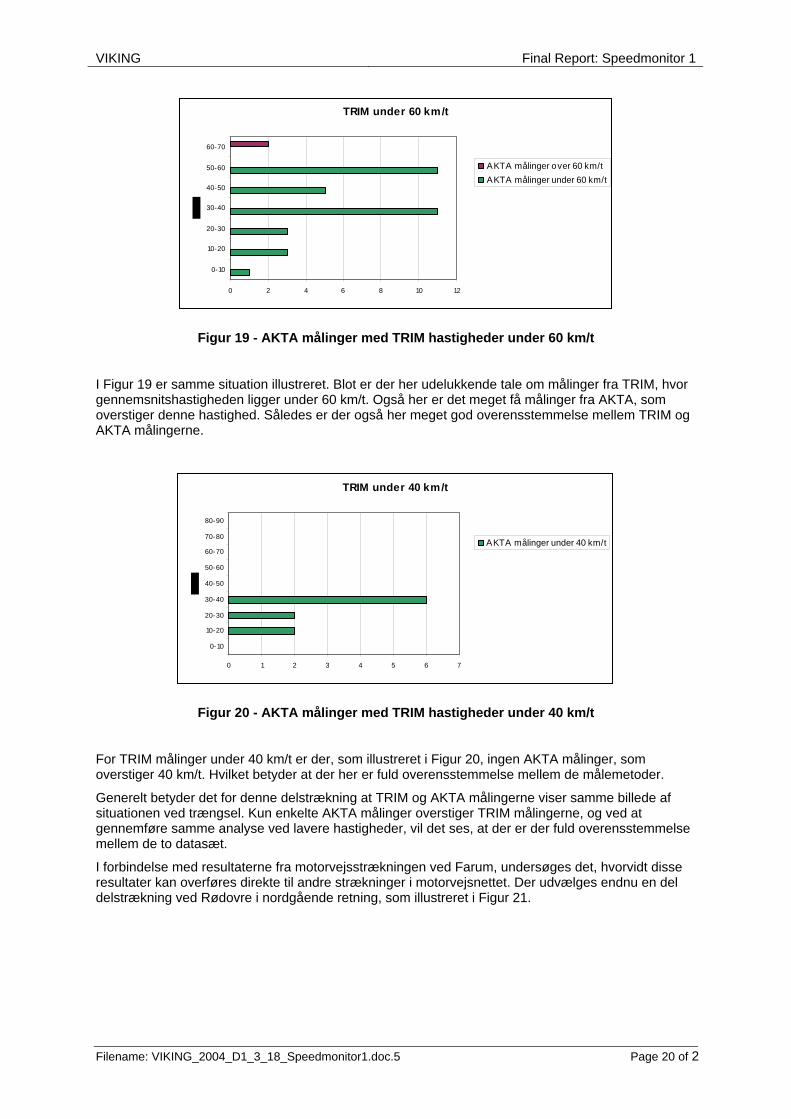
TRIM under 80 km/t
0 5 10 15 20 25
0-10
10-20
20-30
30-40
40-50
50-60
60-70
70-80
80-90
AKTA målinger over 80 km/tAKTA målinger under 80 km/t
Figur 18 - AKTA målinger med TRIM hastigheder under 80 km/t
Figur 18 viser antal AKTA målinger på strækningen, hvor TRIM målingerne alle har været under 80 km/t. Ved TRIM målinger under 80 km/t ses der at kun en enkelt AKTA måling har vist en hastighed over 80 km/t, således er der god overensstemmelse mellem TRIM og AKTA. I praksis vil det betyde, at en eventuel skiltning omkring rejsetid baseret på TRIM vil stemme godt overens med den reelle oplevelse på motorvejen i de pågældende situationer.
VIKING Final Report: Speedmonitor 1
Filename: VIKING_2004_D1_3_18_Speedmonitor1.doc.5 Page 20 of 2
TRIM under 60 km/t
0 2 4 6 8 10 12
0-10
10-20
20-30
30-40
40-50
50-60
60-70
AKTA målinger over 60 km/tAKTA målinger under 60 km/t
Figur 19 - AKTA målinger med TRIM hastigheder under 60 km/t
I Figur 19 er samme situation illustreret. Blot er der her udelukkende tale om målinger fra TRIM, hvor gennemsnitshastigheden ligger under 60 km/t. Også her er det meget få målinger fra AKTA, som overstiger denne hastighed. Således er der også her meget god overensstemmelse mellem TRIM og AKTA målingerne.
TRIM under 40 km/t
0 1 2 3 4 5 6 7
0-10
10-20
20-30
30-40
40-50
50-60
60-70
70-80
80-90
AKTA målinger under 40 km/t
Figur 20 - AKTA målinger med TRIM hastigheder under 40 km/t
For TRIM målinger under 40 km/t er der, som illustreret i Figur 20, ingen AKTA målinger, som overstiger 40 km/t. Hvilket betyder at der her er fuld overensstemmelse mellem de målemetoder.
Generelt betyder det for denne delstrækning at TRIM og AKTA målingerne viser samme billede af situationen ved trængsel. Kun enkelte AKTA målinger overstiger TRIM målingerne, og ved at gennemføre samme analyse ved lavere hastigheder, vil det ses, at der er der fuld overensstemmelse mellem de to datasæt.
I forbindelse med resultaterne fra motorvejsstrækningen ved Farum, undersøges det, hvorvidt disse resultater kan overføres direkte til andre strækninger i motorvejsnettet. Der udvælges endnu en del delstrækning ved Rødovre i nordgående retning, som illustreret i Figur 21.
VIKING Final Report: Speedmonitor 1
Filename: VIKING_2004_D1_3_18_Speedmonitor1.doc.5 Page 21 of 2
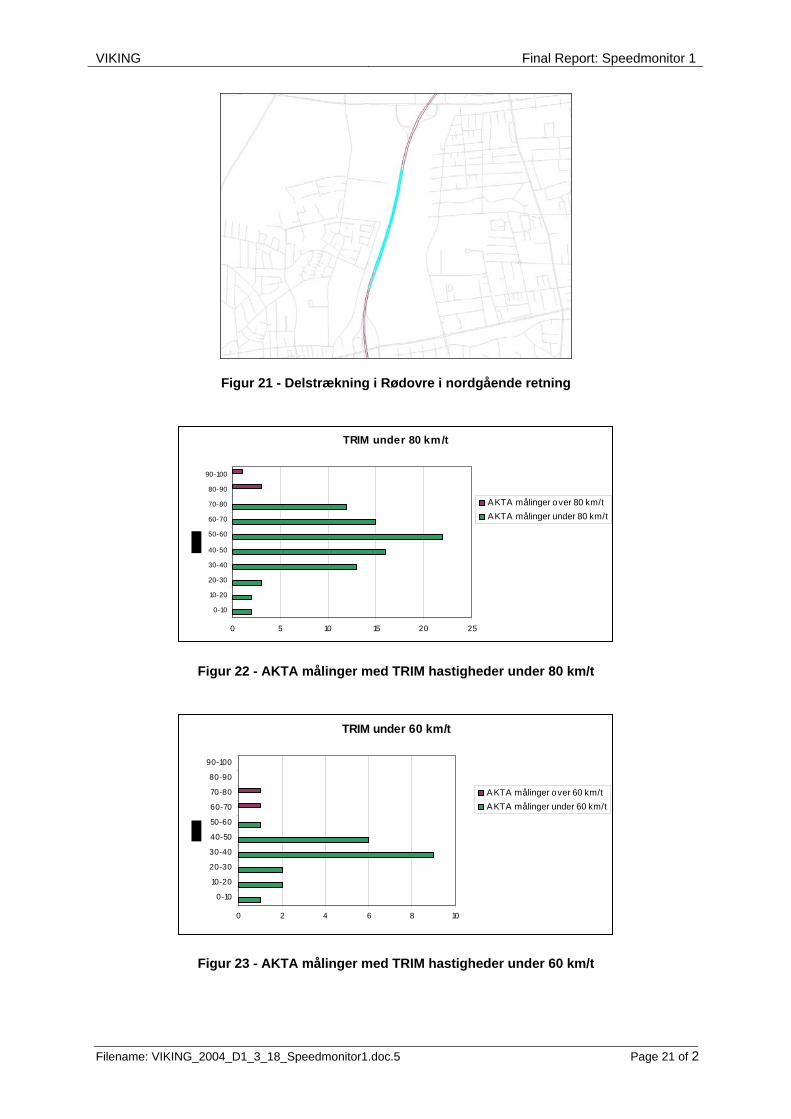
Figur 21 - Delstrækning i Rødovre i nordgående retning
TRIM under 80 km/t
0 5 10 15 20 25
0-10
10-20
20-30
30-40
40-50
50-60
60-70
70-80
80-90
90-100
AKTA målinger over 80 km/tAKTA målinger under 80 km/t
Figur 22 - AKTA målinger med TRIM hastigheder under 80 km/t
TRIM under 60 km/t
0 2 4 6 8 10
0-10
10-20
20-30
30-40
40-50
50-60
60-70
70-80
80-90
90-100
AKTA målinger over 60 km/tAKTA målinger under 60 km/t
Figur 23 - AKTA målinger med TRIM hastigheder under 60 km/t
VIKING Final Report: Speedmonitor 1
Filename: VIKING_2004_D1_3_18_Speedmonitor1.doc.5 Page 22 of 2
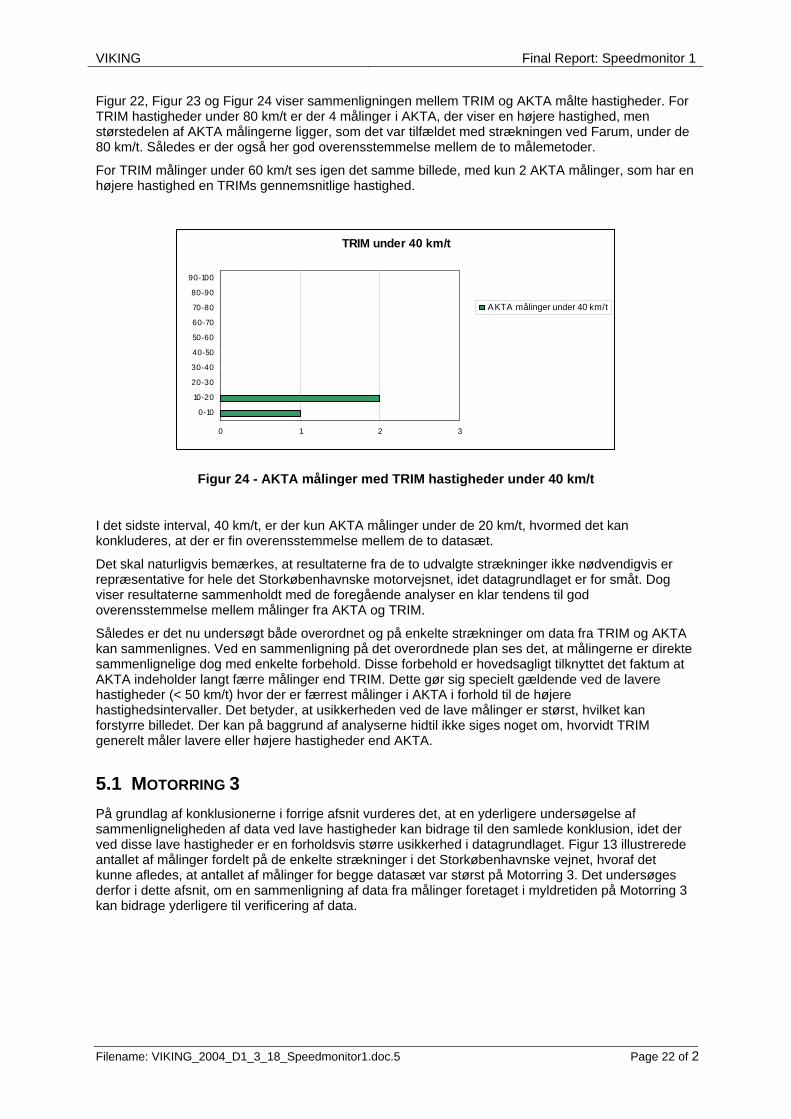
Figur 22, Figur 23 og Figur 24 viser sammenligningen mellem TRIM og AKTA målte hastigheder. For TRIM hastigheder under 80 km/t er der 4 målinger i AKTA, der viser en højere hastighed, men størstedelen af AKTA målingerne ligger, som det var tilfældet med strækningen ved Farum, under de 80 km/t. Således er der også her god overensstemmelse mellem de to målemetoder.
For TRIM målinger under 60 km/t ses igen det samme billede, med kun 2 AKTA målinger, som har en højere hastighed en TRIMs gennemsnitlige hastighed.
TRIM under 40 km/t
0 1 2 3
0-10
10-20
20-30
30-40
40-50
50-60
60-70
70-80
80-90
90-100
AKTA målinger under 40 km/t
Figur 24 - AKTA målinger med TRIM hastigheder under 40 km/t
I det sidste interval, 40 km/t, er der kun AKTA målinger under de 20 km/t, hvormed det kan konkluderes, at der er fin overensstemmelse mellem de to datasæt.
Det skal naturligvis bemærkes, at resultaterne fra de to udvalgte strækninger ikke nødvendigvis er repræsentative for hele det Storkøbenhavnske motorvejsnet, idet datagrundlaget er for småt. Dog viser resultaterne sammenholdt med de foregående analyser en klar tendens til god overensstemmelse mellem målinger fra AKTA og TRIM.
Således er det nu undersøgt både overordnet og på enkelte strækninger om data fra TRIM og AKTA kan sammenlignes. Ved en sammenligning på det overordnede plan ses det, at målingerne er direkte sammenlignelige dog med enkelte forbehold. Disse forbehold er hovedsagligt tilknyttet det faktum at AKTA indeholder langt færre målinger end TRIM. Dette gør sig specielt gældende ved de lavere hastigheder (< 50 km/t) hvor der er færrest målinger i AKTA i forhold til de højere hastighedsintervaller. Det betyder, at usikkerheden ved de lave målinger er størst, hvilket kan forstyrre billedet. Der kan på baggrund af analyserne hidtil ikke siges noget om, hvorvidt TRIM generelt måler lavere eller højere hastigheder end AKTA.
5.1 MOTORRING 3 På grundlag af konklusionerne i forrige afsnit vurderes det, at en yderligere undersøgelse af sammenligneligheden af data ved lave hastigheder kan bidrage til den samlede konklusion, idet der ved disse lave hastigheder er en forholdsvis større usikkerhed i datagrundlaget. Figur 13 illustrerede antallet af målinger fordelt på de enkelte strækninger i det Storkøbenhavnske vejnet, hvoraf det kunne afledes, at antallet af målinger for begge datasæt var størst på Motorring 3. Det undersøges derfor i dette afsnit, om en sammenligning af data fra målinger foretaget i myldretiden på Motorring 3 kan bidrage yderligere til verificering af data.
VIKING Final Report: Speedmonitor 1
Filename: VIKING_2004_D1_3_18_Speedmonitor1.doc.5 Page 23 of 2
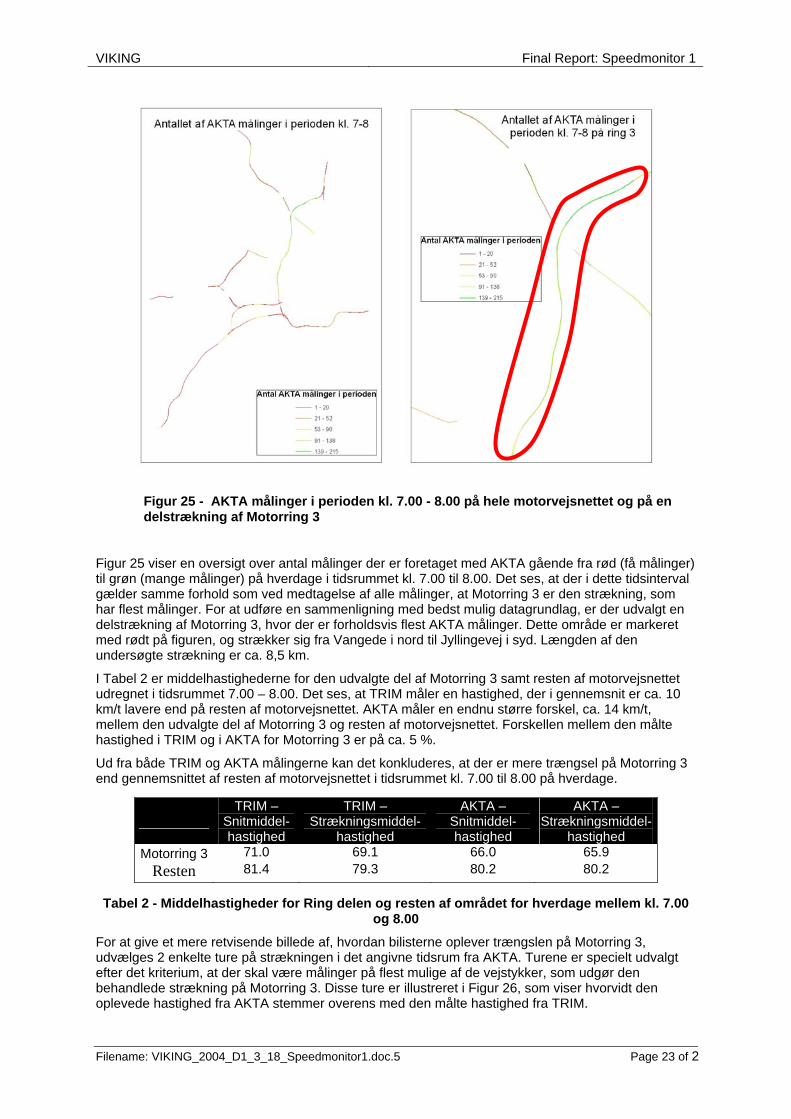
Figur 25 - AKTA målinger i perioden kl. 7.00 - 8.00 på hele motorvejsnettet og på en delstrækning af Motorring 3
Figur 25 viser en oversigt over antal målinger der er foretaget med AKTA gående fra rød (få målinger) til grøn (mange målinger) på hverdage i tidsrummet kl. 7.00 til 8.00. Det ses, at der i dette tidsinterval gælder samme forhold som ved medtagelse af alle målinger, at Motorring 3 er den strækning, som har flest målinger. For at udføre en sammenligning med bedst mulig datagrundlag, er der udvalgt en delstrækning af Motorring 3, hvor der er forholdsvis flest AKTA målinger. Dette område er markeret med rødt på figuren, og strækker sig fra Vangede i nord til Jyllingevej i syd. Længden af den undersøgte strækning er ca. 8,5 km.
I Tabel 2 er middelhastighederne for den udvalgte del af Motorring 3 samt resten af motorvejsnettet udregnet i tidsrummet 7.00 – 8.00. Det ses, at TRIM måler en hastighed, der i gennemsnit er ca. 10 km/t lavere end på resten af motorvejsnettet. AKTA måler en endnu større forskel, ca. 14 km/t, mellem den udvalgte del af Motorring 3 og resten af motorvejsnettet. Forskellen mellem den målte hastighed i TRIM og i AKTA for Motorring 3 er på ca. 5 %.
Ud fra både TRIM og AKTA målingerne kan det konkluderes, at der er mere trængsel på Motorring 3 end gennemsnittet af resten af motorvejsnettet i tidsrummet kl. 7.00 til 8.00 på hverdage.
Tabel 2 - Middelhastigheder for Ring delen og resten af området for hverdage mellem kl. 7.00 og 8.00
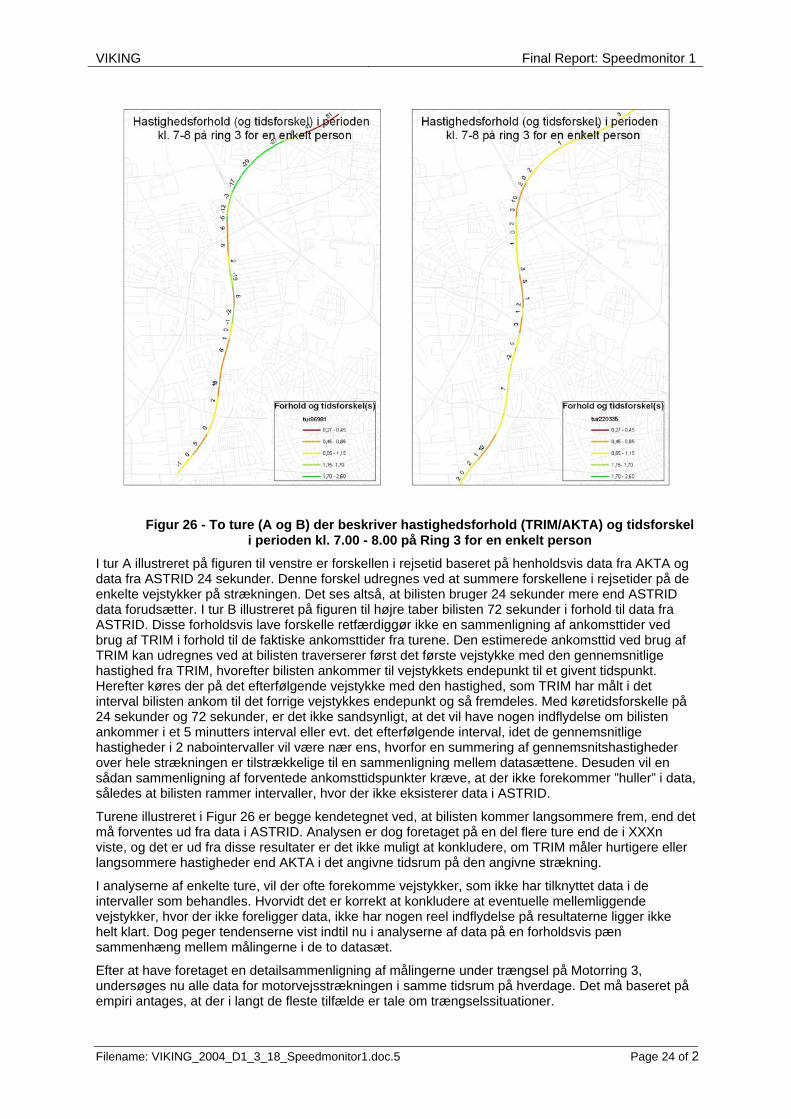
For at give et mere retvisende billede af, hvordan bilisterne oplever trængslen på Motorring 3, udvælges 2 enkelte ture på strækningen i det angivne tidsrum fra AKTA. Turene er specielt udvalgt efter det kriterium, at der skal være målinger på flest mulige af de vejstykker, som udgør den behandlede strækning på Motorring 3. Disse ture er illustreret i Figur 26, som viser hvorvidt den oplevede hastighed fra AKTA stemmer overens med den målte hastighed fra TRIM.
TRIM – Snitmiddel-hastighed
TRIM – Strækningsmiddel-
hastighed
AKTA – Snitmiddel-hastighed
AKTA – Strækningsmiddel-
hastighed Motorring 3 71.0 69.1 66.0 65.9
Resten 81.4 79.3 80.2 80.2
VIKING Final Report: Speedmonitor 1
Filename: VIKING_2004_D1_3_18_Speedmonitor1.doc.5 Page 24 of 2
Figur 26 - To ture (A og B) der beskriver hastighedsforhold (TRIM/AKTA) og tidsforskel i perioden kl. 7.00 - 8.00 på Ring 3 for en enkelt person
I tur A illustreret på figuren til venstre er forskellen i rejsetid baseret på henholdsvis data fra AKTA og data fra ASTRID 24 sekunder. Denne forskel udregnes ved at summere forskellene i rejsetider på de enkelte vejstykker på strækningen. Det ses altså, at bilisten bruger 24 sekunder mere end ASTRID data forudsætter. I tur B illustreret på figuren til højre taber bilisten 72 sekunder i forhold til data fra ASTRID. Disse forholdsvis lave forskelle retfærdiggør ikke en sammenligning af ankomsttider ved brug af TRIM i forhold til de faktiske ankomsttider fra turene. Den estimerede ankomsttid ved brug af TRIM kan udregnes ved at bilisten traverserer først det første vejstykke med den gennemsnitlige hastighed fra TRIM, hvorefter bilisten ankommer til vejstykkets endepunkt til et givent tidspunkt. Herefter køres der på det efterfølgende vejstykke med den hastighed, som TRIM har målt i det interval bilisten ankom til det forrige vejstykkes endepunkt og så fremdeles. Med køretidsforskelle på 24 sekunder og 72 sekunder, er det ikke sandsynligt, at det vil have nogen indflydelse om bilisten ankommer i et 5 minutters interval eller evt. det efterfølgende interval, idet de gennemsnitlige hastigheder i 2 nabointervaller vil være nær ens, hvorfor en summering af gennemsnitshastigheder over hele strækningen er tilstrækkelige til en sammenligning mellem datasættene. Desuden vil en sådan sammenligning af forventede ankomsttidspunkter kræve, at der ikke forekommer ”huller” i data, således at bilisten rammer intervaller, hvor der ikke eksisterer data i ASTRID.
Turene illustreret i Figur 26 er begge kendetegnet ved, at bilisten kommer langsommere frem, end det må forventes ud fra data i ASTRID. Analysen er dog foretaget på en del flere ture end de i XXXn viste, og det er ud fra disse resultater er det ikke muligt at konkludere, om TRIM måler hurtigere eller langsommere hastigheder end AKTA i det angivne tidsrum på den angivne strækning.
I analyserne af enkelte ture, vil der ofte forekomme vejstykker, som ikke har tilknyttet data i de intervaller som behandles. Hvorvidt det er korrekt at konkludere at eventuelle mellemliggende vejstykker, hvor der ikke foreligger data, ikke har nogen reel indflydelse på resultaterne ligger ikke helt klart. Dog peger tendenserne vist indtil nu i analyserne af data på en forholdsvis pæn sammenhæng mellem målingerne i de to datasæt.
Efter at have foretaget en detailsammenligning af målingerne under trængsel på Motorring 3, undersøges nu alle data for motorvejsstrækningen i samme tidsrum på hverdage. Det må baseret på empiri antages, at der i langt de fleste tilfælde er tale om trængselssituationer.
VIKING Final Report: Speedmonitor 1
Filename: VIKING_2004_D1_3_18_Speedmonitor1.doc.5 Page 25 of 2
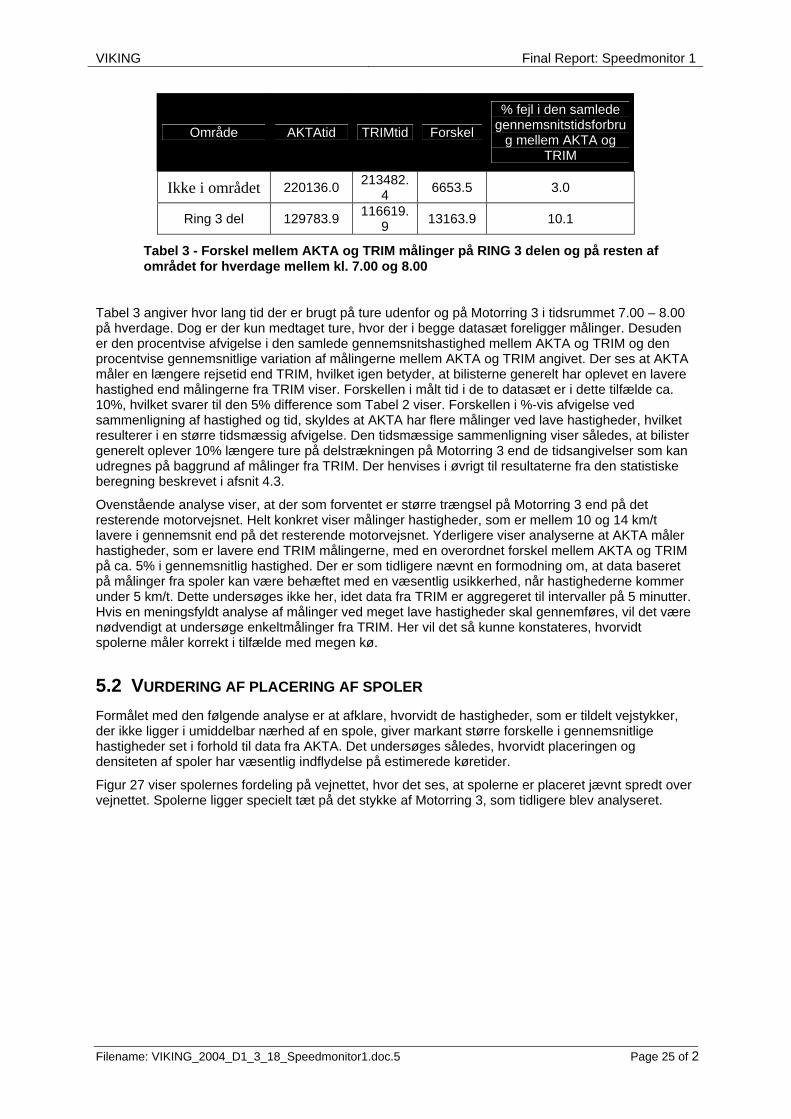
Område AKTAtid TRIMtid Forskel
% fejl i den samlede gennemsnitstidsforbru
g mellem AKTA og TRIM
Ikke i området 220136.0 213482.4 6653.5 3.0
Ring 3 del 129783.9 116619.9 13163.9 10.1
Tabel 3 - Forskel mellem AKTA og TRIM målinger på RING 3 delen og på resten af området for hverdage mellem kl. 7.00 og 8.00
Tabel 3 angiver hvor lang tid der er brugt på ture udenfor og på Motorring 3 i tidsrummet 7.00 – 8.00 på hverdage. Dog er der kun medtaget ture, hvor der i begge datasæt foreligger målinger. Desuden er den procentvise afvigelse i den samlede gennemsnitshastighed mellem AKTA og TRIM og den procentvise gennemsnitlige variation af målingerne mellem AKTA og TRIM angivet. Der ses at AKTA måler en længere rejsetid end TRIM, hvilket igen betyder, at bilisterne generelt har oplevet en lavere hastighed end målingerne fra TRIM viser. Forskellen i målt tid i de to datasæt er i dette tilfælde ca. 10%, hvilket svarer til den 5% difference som Tabel 2 viser. Forskellen i %-vis afvigelse ved sammenligning af hastighed og tid, skyldes at AKTA har flere målinger ved lave hastigheder, hvilket resulterer i en større tidsmæssig afvigelse. Den tidsmæssige sammenligning viser således, at bilister generelt oplever 10% længere ture på delstrækningen på Motorring 3 end de tidsangivelser som kan udregnes på baggrund af målinger fra TRIM. Der henvises i øvrigt til resultaterne fra den statistiske beregning beskrevet i afsnit 4.3.
Ovenstående analyse viser, at der som forventet er større trængsel på Motorring 3 end på det resterende motorvejsnet. Helt konkret viser målinger hastigheder, som er mellem 10 og 14 km/t lavere i gennemsnit end på det resterende motorvejsnet. Yderligere viser analyserne at AKTA måler hastigheder, som er lavere end TRIM målingerne, med en overordnet forskel mellem AKTA og TRIM på ca. 5% i gennemsnitlig hastighed. Der er som tidligere nævnt en formodning om, at data baseret på målinger fra spoler kan være behæftet med en væsentlig usikkerhed, når hastighederne kommer under 5 km/t. Dette undersøges ikke her, idet data fra TRIM er aggregeret til intervaller på 5 minutter. Hvis en meningsfyldt analyse af målinger ved meget lave hastigheder skal gennemføres, vil det være nødvendigt at undersøge enkeltmålinger fra TRIM. Her vil det så kunne konstateres, hvorvidt spolerne måler korrekt i tilfælde med megen kø.
5.2 VURDERING AF PLACERING AF SPOLER Formålet med den følgende analyse er at afklare, hvorvidt de hastigheder, som er tildelt vejstykker, der ikke ligger i umiddelbar nærhed af en spole, giver markant større forskelle i gennemsnitlige hastigheder set i forhold til data fra AKTA. Det undersøges således, hvorvidt placeringen og densiteten af spoler har væsentlig indflydelse på estimerede køretider.
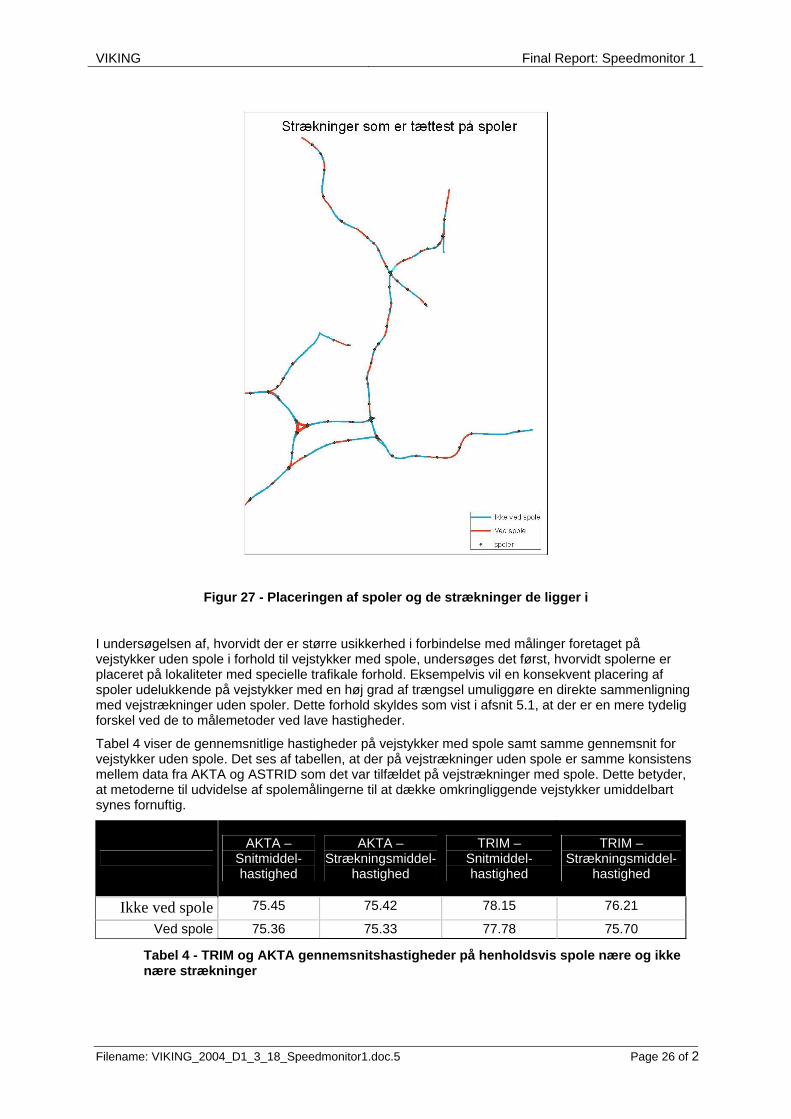
Figur 27 viser spolernes fordeling på vejnettet, hvor det ses, at spolerne er placeret jævnt spredt over vejnettet. Spolerne ligger specielt tæt på det stykke af Motorring 3, som tidligere blev analyseret.
VIKING Final Report: Speedmonitor 1
Filename: VIKING_2004_D1_3_18_Speedmonitor1.doc.5 Page 26 of 2
Figur 27 - Placeringen af spoler og de strækninger de ligger i
I undersøgelsen af, hvorvidt der er større usikkerhed i forbindelse med målinger foretaget på vejstykker uden spole i forhold til vejstykker med spole, undersøges det først, hvorvidt spolerne er placeret på lokaliteter med specielle trafikale forhold. Eksempelvis vil en konsekvent placering af spoler udelukkende på vejstykker med en høj grad af trængsel umuliggøre en direkte sammenligning med vejstrækninger uden spoler. Dette forhold skyldes som vist i afsnit 5.1, at der er en mere tydelig forskel ved de to målemetoder ved lave hastigheder.
Tabel 4 viser de gennemsnitlige hastigheder på vejstykker med spole samt samme gennemsnit for vejstykker uden spole. Det ses af tabellen, at der på vejstrækninger uden spole er samme konsistens mellem data fra AKTA og ASTRID som det var tilfældet på vejstrækninger med spole. Dette betyder, at metoderne til udvidelse af spolemålingerne til at dække omkringliggende vejstykker umiddelbart synes fornuftig.
AKTA –
Snitmiddel-hastighed
AKTA – Strækningsmiddel-
hastighed
TRIM – Snitmiddel-hastighed
TRIM – Strækningsmiddel-
hastighed
Ikke ved spole 75.45 75.42 78.15 76.21
Ved spole 75.36 75.33 77.78 75.70
Tabel 4 - TRIM og AKTA gennemsnitshastigheder på henholdsvis spole nære og ikke nære strækninger
VIKING Final Report: Speedmonitor 1
Filename: VIKING_2004_D1_3_18_Speedmonitor1.doc.5 Page 27 of 2
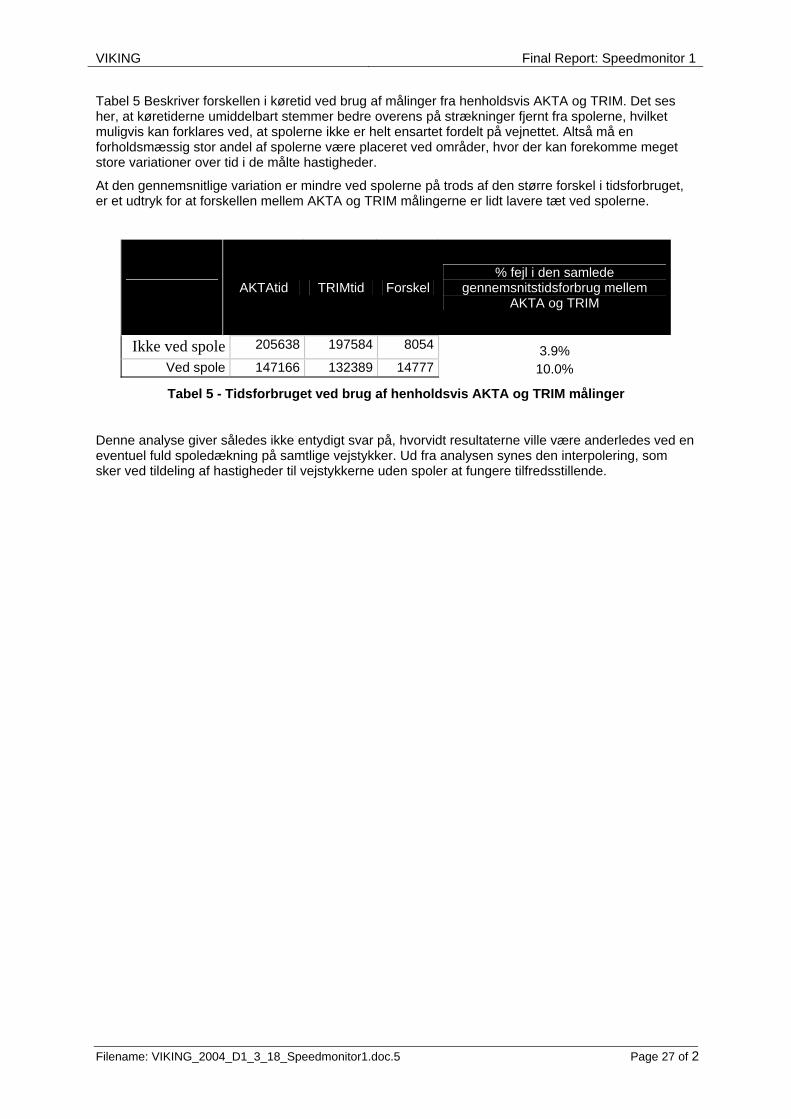
Tabel 5 Beskriver forskellen i køretid ved brug af målinger fra henholdsvis AKTA og TRIM. Det ses her, at køretiderne umiddelbart stemmer bedre overens på strækninger fjernt fra spolerne, hvilket muligvis kan forklares ved, at spolerne ikke er helt ensartet fordelt på vejnettet. Altså må en forholdsmæssig stor andel af spolerne være placeret ved områder, hvor der kan forekomme meget store variationer over tid i de målte hastigheder.
At den gennemsnitlige variation er mindre ved spolerne på trods af den større forskel i tidsforbruget, er et udtryk for at forskellen mellem AKTA og TRIM målingerne er lidt lavere tæt ved spolerne.
AKTAtid TRIMtid Forskel % fejl i den samlede
gennemsnitstidsforbrug mellem AKTA og TRIM
Ikke ved spole 205638 197584 8054 3.9% Ved spole 147166 132389 14777 10.0%
Tabel 5 - Tidsforbruget ved brug af henholdsvis AKTA og TRIM målinger
Denne analyse giver således ikke entydigt svar på, hvorvidt resultaterne ville være anderledes ved en eventuel fuld spoledækning på samtlige vejstykker. Ud fra analysen synes den interpolering, som sker ved tildeling af hastigheder til vejstykkerne uden spoler at fungere tilfredsstillende.
VIKING Final Report: Speedmonitor 1
Filename: VIKING_2004_D1_3_18_Speedmonitor1.doc.5 Page 28 of 2
6. FORSLAG TIL ASTRID På baggrund af databehandlingen beskrevet i kapitel 4 samt analyserne foretaget på data i kapitel 5, vil nærværende kapitel søge at drage nogle generelle konklusioner med hensyn til målinger foretaget af TRIM med efterfølgende lagring i ASTRID.
En af de mest nærliggende analyser i forbindelse med verifikation af data fra TRIM er placeringen samt antallet af spoler. Her må det konkluderes, at data fra TRIM stemmer forholdsvis godt overens med data fra AKTA, hvilket igen betyder, at spolernes placering virker fornuftig. Med hensyn til antallet af spoler, virker det naturligt, at kvaliteten af data forbedres ved anlægning af et større antal spoler end det eksisterende. I den forbindelse er der gennemført en analyse, som søger at sammenligne forskellen i målinger fra TRIM med målinger fra AKTA på vejstrækninger, hvor der ikke er nedlagt spoler. Resultatet af analysen kan ses på Tabel 5, hvor det fremgår, at der ikke kan konstateres nogen betydelig forskel i de ekstrapolerede data fra TRIMs nærliggende spoler og data fra AKTA. Analysen viser således, at den metode, som bruges til ekstrapolering af data fra vejstykker med nedlagte spoler til vejstykker uden nedlagte spoler er tilstrækkelig. Denne konklusion er dog underlagt de samme begrænsninger som gælder for den generelle sammenligning af data mellem AKTA og ASTRID.
Hvis der ses bort fra trængselssituationer, har det ikke været muligt at drage nogle generelle konklusioner omkring hvorvidt TRIMs målinger stemmer overens med AKTA målinger. Dette forhold skyldes som nævnt i kapitel 4 at det udtræk fra ASTRID, som analyserne bygger på, har hastighedsmålinger på 100 km/t eller derover filtreret fra. Der er taget højde for dette i analyserne ved at udelade tilsvarende målinger fra AKTA. Hvis denne filtrering ikke viser sig at have nogen væsentlig indflydelse på det samlede billede, vil det dog kunne antages at TRIM og AKTA afspejler den trafikale situation forholdsvis ens. Det kunne dog være interessant at foretage en overordnet analyse baseret på det fulde datagrundlag fra ASTRID, hvorfor filtreringen af høje hastigheder ikke bør foretages forud for fremtidige analyser.
I forbindelse med verifikationen af ASTRID data i kapitel 4 blev der i nogle enkelte tilfælde fundet uoverensstemmelser mellem nøglerne i tabellerne og den underliggende geografi, ligesom enkelte spolers kilometrering viste sig ikke at være konsistent. Generelt må det dog siges, at TRIM data er tilstrækkelige til at gennemføre analyser og sammenligninger med GPS-data. Ligeledes kan det med forbehold for det forholdsvis lille antal målinger fra AKTA konkluderes, at data fra ASTRID stemmer godt overens med bilisternes oplevelse af situationen på motorvejene i det Storkøbenhavnske område.
VIKING Final Report: Speedmonitor 1
Filename: VIKING_2004_D1_3_18_Speedmonitor1.doc.5 Page 29 of 2
7. FREMTIDIG ANVENDELSE AF GPS-BASERET DATA I det foregående kapitel blev det konkluderet, at målinger fra TRIM giver et retvisende billede af situationen på de Storkøbenhavnske motorveje. I den forbindelse kan det naturligvis ligeledes konkluderes, at de GPS baserede data fra AKTA stemmer overens med målingerne fra TRIM. Hvis det viser sig ved efterfølgende analyser over længere perioder og med flere målinger, at der er samme overensstemmelse mellem data, vil det betyde, at hastighedsmålinger med fordel kan suppleres med GPS på motorvejsnettet. Især vil dette være gældende, hvis der opleves en stadig stigning i trængslen på vejnettet, idet det i disse situationer er påvist, at der kan være problemer med målinger foretaget udelukkende af spoler. Herudover vil det på sigt være en forholdsvis billig løsning at indsamle GPS information.
Ovenstående konklusion er dog med det forbehold, at mængden af GPS data øges, således at en større del af motorvejsnettet dækkes i flere tidsrum. Det må dog også forventes, at der på forholdsvis kort sigt vil være langt bedre adgang til GPS data, idet disse data kan indhentes fra kommercielle navigationsanlæg.
En umiddelbar fordel ved anvendelsen af GPS baseret data er muligheden for at få øjebliksbilleder af den trafikale situation på motorvejene. Da dette også gør sig gældende for spoledata vil det ligeledes til disse formål være en fordel at kombinere dynamiske data fra de to målemetoder.
I forbindelse med trængselssituationer, hvor den gennemsnitlige hastighed på vejstrækningerne er lav, viser analyserne, at det kan være en fordel at kombinere data fra de to målemetoder. Dette skyldes, at der ved lave hastigheder er en uforholdsmæssig større varians i målingerne, hvilket igen kan skyldes ”stop-kør” mønstret, som viser sig ved trængsel. Det må derfor antages, at gennemsnittet af målingerne fra begge metoder vil give et mere retvisende billede at situationen på de omhandlede vejstrækninger. Ved meget lave hastigheder må det på baggrund af variansanalysen på Motorring 3 anbefales at bruge GPS målinger.
Den høje detaljeringsgrad fra målinger foretaget med GPS kan således benyttes til at give statistikker over præcise lokaliteter for dannelsen af trafikale køer, ligesom tidspunkterne for kødannelse kan fastslås med meget høj grad af præcision. Disse informationer kan naturligvis således benyttes som beslutningsgrundlag for investeringer i infrastruktur, men måske mere interessant til styring af variable hastighedstavler, hvor det dynamiske GPS data kan medvirke til en hurtig respons på forskellige trafikale situationer. Dette kan udnyttes til at afhjælpe problemer med trafikafviklingen på motorvejene i visse situationer ved rettidig sænkning af hastighedsgrænser m.v.. Denne funktionalitet dækkes i dag med stor præcision af spoler, som har den fordel, at der kan registreres et meget højt antal biler, men dog ikke altid er placeret, hvor køerne opstår.
Økonomisk set er det naturligvis billigere at indsamle GPS data fra den private bilpark frem for nedgravning og vedligeholdelse af spoler, og det må konkluderes, at der bør satses på at opbygge metoder og procedurer for inddragelse af GPS data i overvågningen af motorvejsnettet i fremtiden, således at der opnås en synergieffekt mellem de to målemetoder.
VIKING Final Report: Speedmonitor 1
Filename: VIKING_2004_D1_3_18_Speedmonitor1.doc.5 Page 30 of 2
8. KONKLUSION Generelt er der brugt forholdsmæssigt meget tid på at udvikle automatiske procedurer til ensretning af data fra de to datakilder. Herudover er de automatiserede procedurer blevet valideret manuelt, og specielle situationer og fejl i datakilderne blevet behandlet. Dette betyder naturligvis, at der i dette projekt er lagt mindre vægt på at gennemføre egentlige statistiske beregninger, hvorfor det henstilles til det næste projekt at gennemføre disse.
Projektet har gennemført en databehandling, som muliggør en direkte sammenligning mellem data fra ASTRID og AKTA. I denne databehandling er det noteret, at data fra ASTRID er forelagt frasorteret målinger med hastigheder over 100 km/t. Denne frasortering har vist sig at være uhensigtsmæssig, når der foretages en overordnet sammenligning af data, hvor det undersøges, hvorvidt data totalt set stemmer overens. Ved at foretage samme filtrering af data fra AKTA, har det dog været muligt med forbehold for manglende målinger i ASTRID at konkludere, at der er god overensstemmelse mellem data fra de to målemetoder.
Grundet manglende strækningsmiddelhastighed på en del af data fra ASTRID er det valgt kun at undersøge målinger fra en periode på 16 måneder, hvilket dog også er tilstrækkeligt til at foretage de nødvendige analyser. Således er data sammenlignet på baggrund af forskellige hastighedsintervaller, antallet af målinger samt enkelte strækninger. I alle sammenligninger kan der påvises tilfredsstillende overensstemmelse mellem data fra ASTRID og AKTA.
Specielt er der sidst i analysen fokuseret på Motorring 3, hvor indledende analyser påviser en højere grad af trængsel end på det øvrige motorvejsnet. En analyse af køretider på to udvalgte ture på en delstrækning af Motorring 3 viser forskelle i køretider på 24 og 72 sekunder, dog uden at der kan påvises en entydig sammenhæng mellem målingerne. En entydig sammenhæng er dog fundet ved at gennemføre en variansanalyse af målingerne i tidsintervaller, hvor der må påregnes at være en del trængsel. Denne analyse viste som forventet, at TRIM generelt måler lavere hastigheder end AKTA i trængselssituationer. Det er således bevist at der som forventet er en statistisk signifikant forskel på målinger fra de to metoder i trængselssituationer.
Den helt overordnede konklusion er, at der er påvist så forholdsmæssig stor overensstemmelse mellem målinger foretaget i AKTA og TRIM, at brug af GPS data i fremtiden til overvågning af den trafikale situation på motorvejsnettet bestemt er en væsentlig mulighed. Hvis tendensen til stigende trængsel på vejnettet fortsætter, vil det være en klar fordel at supplere spoledata med GPS baseret data, idet der ved meget lave hastigheder er velkendte problemer med at få korrekte data fra spoler.



















![final p roject [bar rendering]](https://img.pdfslide.us/doc/110x75/568163ef550346895dd568c2/final-p-roject-bar-rendering.jpg)









