Embed Size (px)
Citation preview

Rockwell Robotic Solutions
MM03
MM04- How to Program SCARA and Six Axis
Robots
MM05- Implementing Vision in Robotics
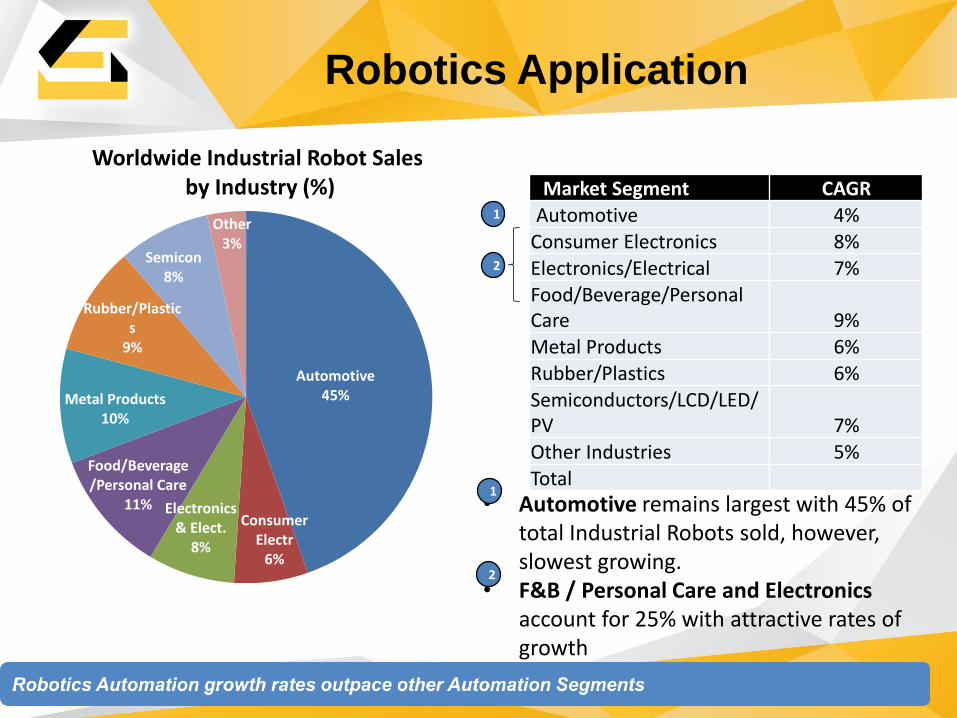
• Automotive remains largest with 45% of total Industrial Robots sold, however, slowest growing.
• F&B / Personal Care and Electronics account for 25% with attractive rates of growth
1
2
1
2
Robotics Application
Automotive 45%
Consumer Electr
6%
Electronics & Elect.
8%
Food/Beverage/Personal Care
11%
Metal Products 10%
Rubber/Plastics
9%
Semicon 8%
Other 3%
Worldwide Industrial Robot Sales by Industry (%) Market Segment CAGR
Automotive 4% Consumer Electronics 8%
Electronics/Electrical 7% Food/Beverage/Personal Care 9%
Metal Products 6% Rubber/Plastics 6%
Semiconductors/LCD/LED/PV 7% Other Industries 5%
Total

Packaging Line
Cartoner
Primary Wrapper
Secondary Wrapper
Accumulator
Product Sorting
Case Packer
Palletizer
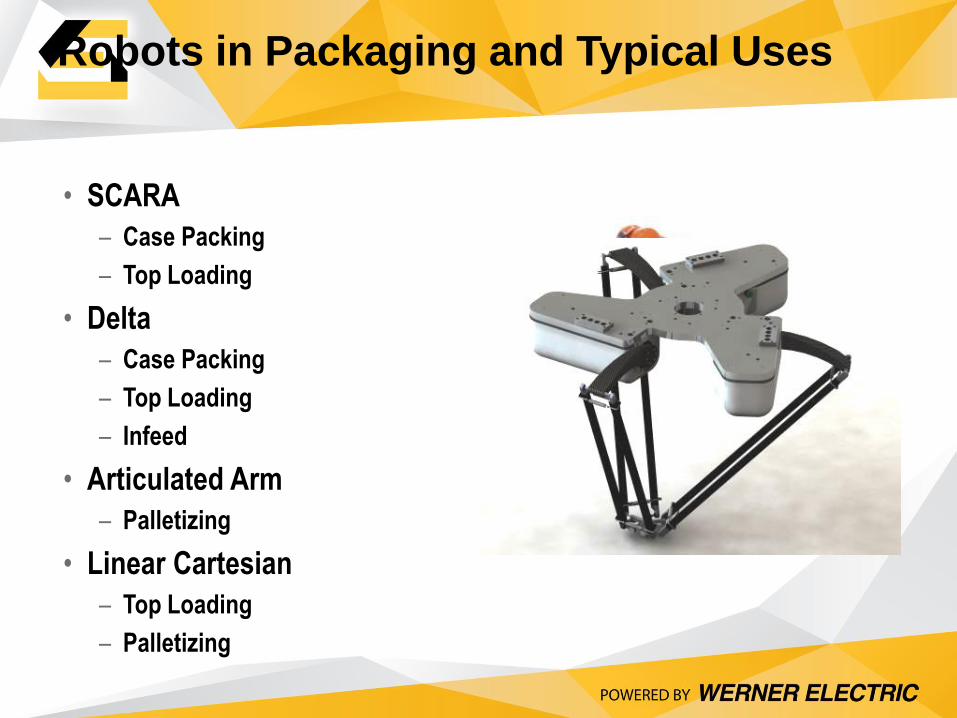
Robots in Packaging and Typical Uses
• SCARA
– Case Packing
– Top Loading
• Delta
– Case Packing
– Top Loading
– Infeed
• Articulated Arm
– Palletizing
• Linear Cartesian
– Top Loading
– Palletizing
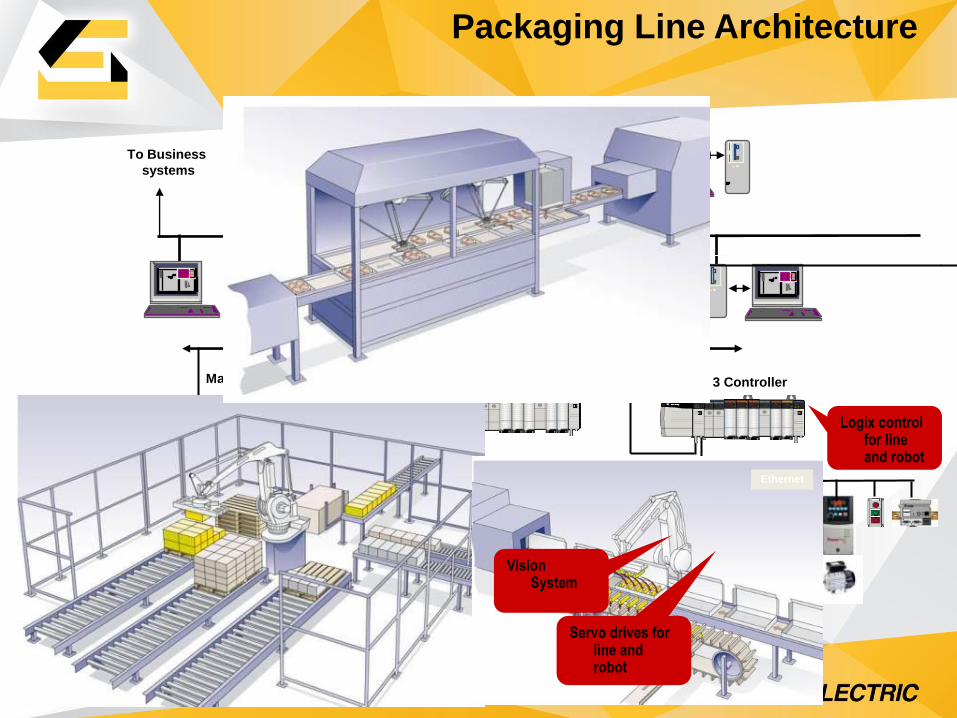
Packaging Line Architecture
Material Editor Management Clients
LAN (TCP/IP, Ethernet)
Ethernet
High Alarm Low Alarm Comm. Err.
Machine 1 Controller
To Business
systems
Machine 2 Controller
High Alarm Low Alarm Comm. Err.
High Alarm Low Alarm Comm. Err.
Machine 3 Controller
Ethernet
Servo drives for line and robot
Logix control for line and robot
Vision System

8
Packaging – Packing Applications
Packing Applications
• Case Packing
– Placing smaller boxes into
larger boxes
• Racetrack Packing
– Picking multiple items and
placing into a tray

9
Packaging - Palletizing
Palletizing Applications
• Placing boxes, trays, bags,
bottles, kegs, on a pallet
• Assortment mixing
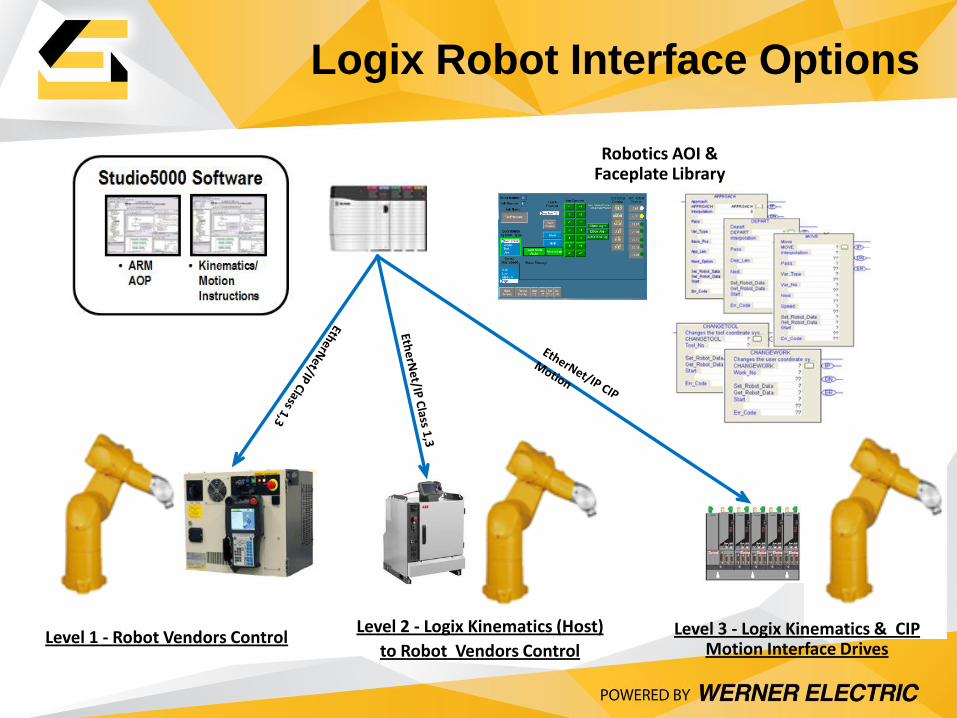
Logix Robot Interface Options
Robotics AOI & Faceplate Library
Level 1 - Robot Vendors Control Level 3 - Logix Kinematics & CIP Motion Interface Drives
Level 2 - Logix Kinematics (Host)
to Robot Vendors Control
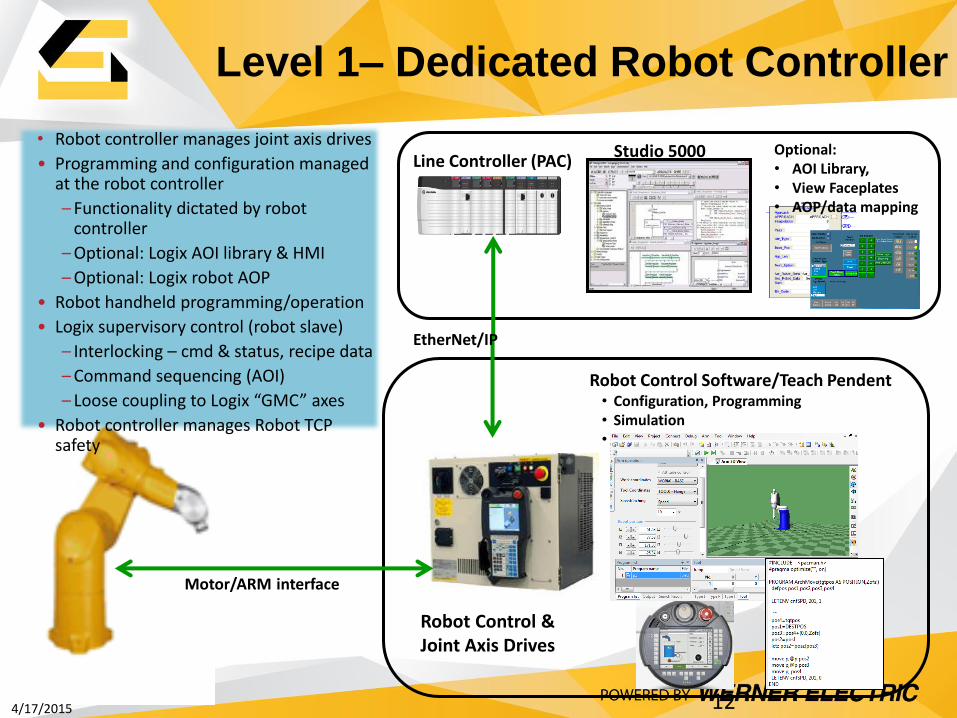
Level 1– Dedicated Robot Controller
Robot Control & Joint Axis Drives
Motor/ARM interface
Line Controller (PAC) Studio 5000
Robot Control Software/Teach Pendent • Configuration, Programming • Simulation • Manual control (Jog, Teach)
EtherNet/IP
4/17/2015 12
Optional: • AOI Library, • View Faceplates • AOP/data mapping
• Robot controller manages joint axis drives
• Programming and configuration managed at the robot controller
– Functionality dictated by robot controller
– Optional: Logix AOI library & HMI
– Optional: Logix robot AOP
• Robot handheld programming/operation
• Logix supervisory control (robot slave)
– Interlocking – cmd & status, recipe data
– Command sequencing (AOI)
– Loose coupling to Logix “GMC” axes
• Robot controller manages Robot TCP safety
FANUC Robotics
13
• RA Partnership
• Advanced Global Collaboration
• Products
• Delta, SCARA, Articulated Arm
• Largest supplier worldwide with over 220,000 robot arms
installed
• Logix Integration
• Level 1 EtherNet/IP
• Custom Add-on-profile (AOP)
• Enhanced data access interface (EDA)
• CIP Safety slave
• Line HMI integration
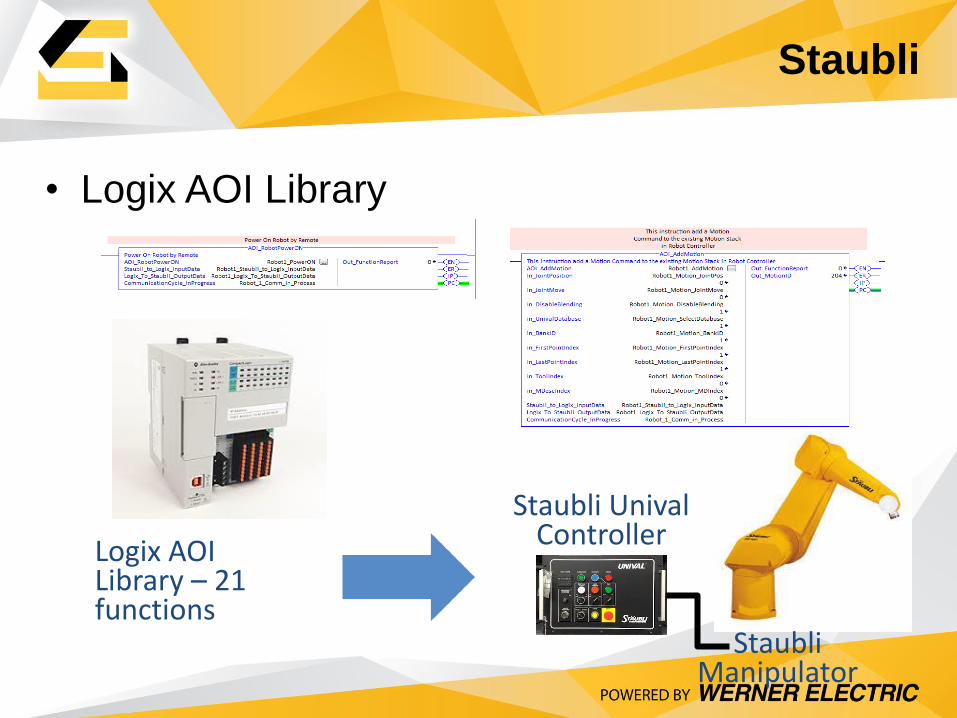
Staubli
Staubli Unival Controller
Staubli Manipulator
Logix AOI Library – 21 functions
• Logix AOI Library
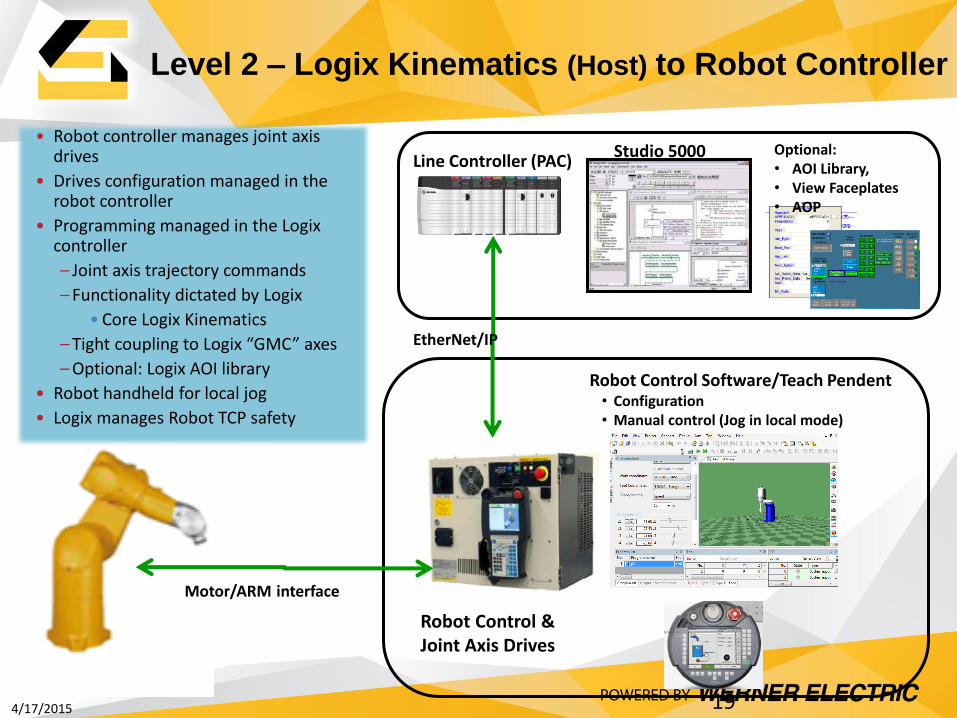
Level 2 – Logix Kinematics (Host) to Robot Controller
Robot Control & Joint Axis Drives
Motor/ARM interface
Line Controller (PAC) Studio 5000
Robot Control Software/Teach Pendent • Configuration • Manual control (Jog in local mode)
EtherNet/IP
4/17/2015 19
Optional: • AOI Library, • View Faceplates • AOP
• Robot controller manages joint axis drives
• Drives configuration managed in the robot controller
• Programming managed in the Logix controller
– Joint axis trajectory commands
– Functionality dictated by Logix
• Core Logix Kinematics
– Tight coupling to Logix “GMC” axes
– Optional: Logix AOI library
• Robot handheld for local jog
• Logix manages Robot TCP safety
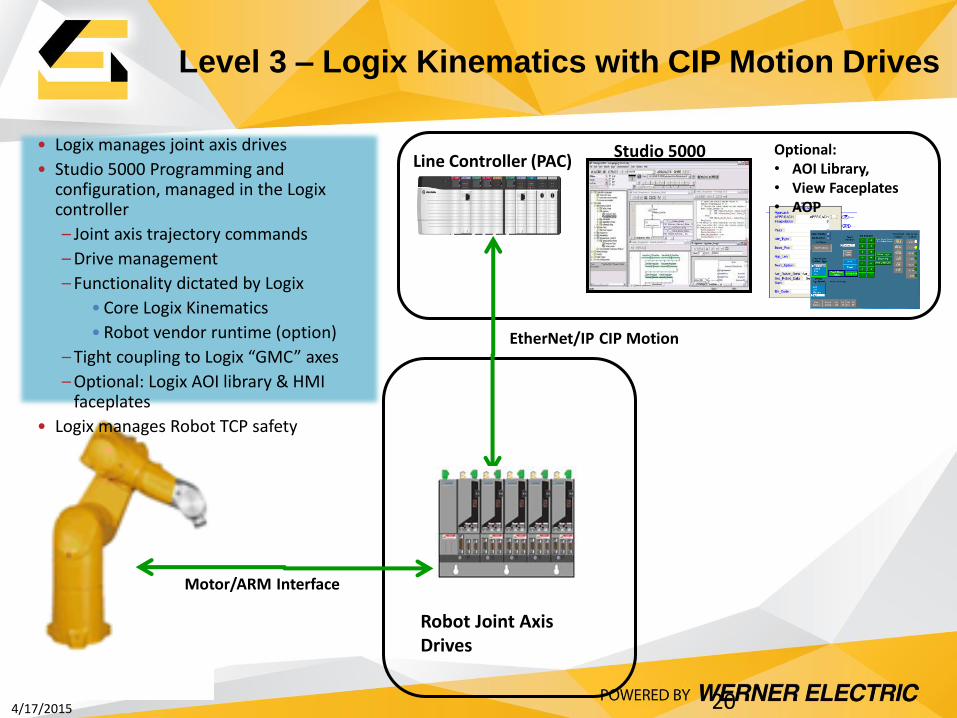
Level 3 – Logix Kinematics with CIP Motion Drives
Robot Joint Axis Drives
Motor/ARM Interface
Line Controller (PAC) Studio 5000
EtherNet/IP CIP Motion
4/17/2015 20
Optional: • AOI Library, • View Faceplates • AOP
• Logix manages joint axis drives
• Studio 5000 Programming and configuration, managed in the Logix controller
– Joint axis trajectory commands
– Drive management
– Functionality dictated by Logix
• Core Logix Kinematics
• Robot vendor runtime (option)
– Tight coupling to Logix “GMC” axes
– Optional: Logix AOI library & HMI faceplates
• Logix manages Robot TCP safety
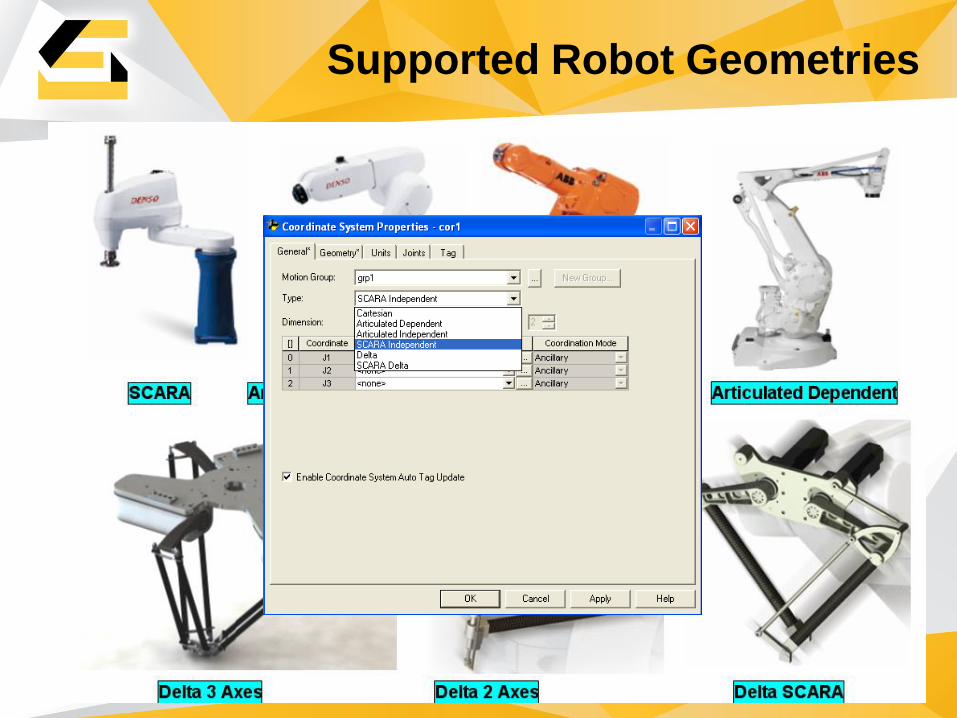
Supported Robot Geometries
• 24
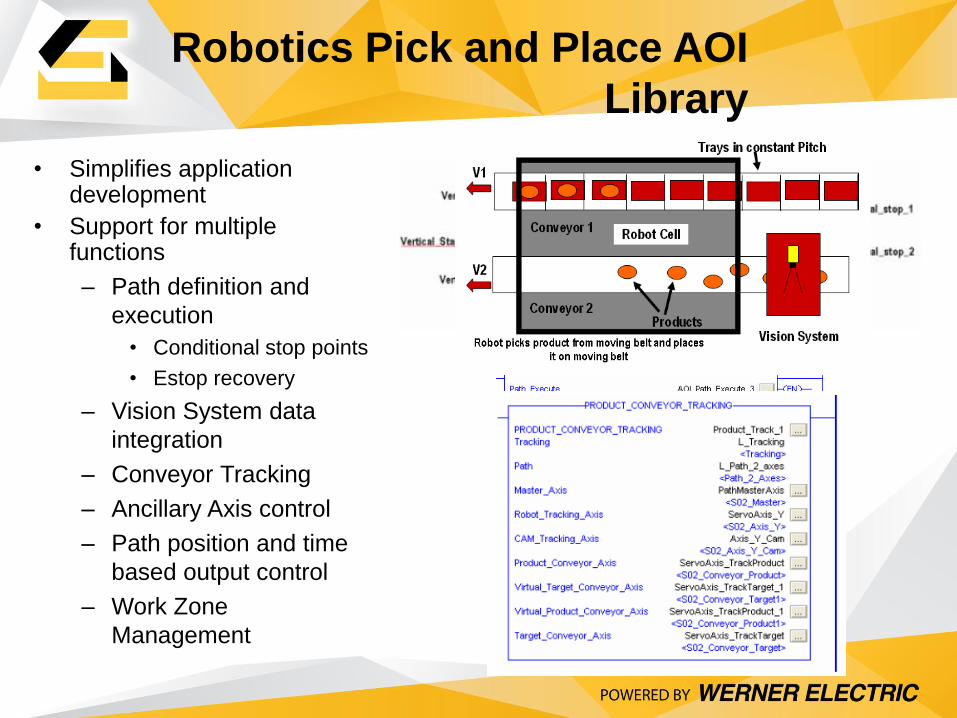
Robotics Pick and Place AOI
Library
• Simplifies application development
• Support for multiple functions
– Path definition and
execution
• Conditional stop points
• Estop recovery
– Vision System data
integration
– Conveyor Tracking
– Ancillary Axis control
– Path position and time
based output control
– Work Zone
Management
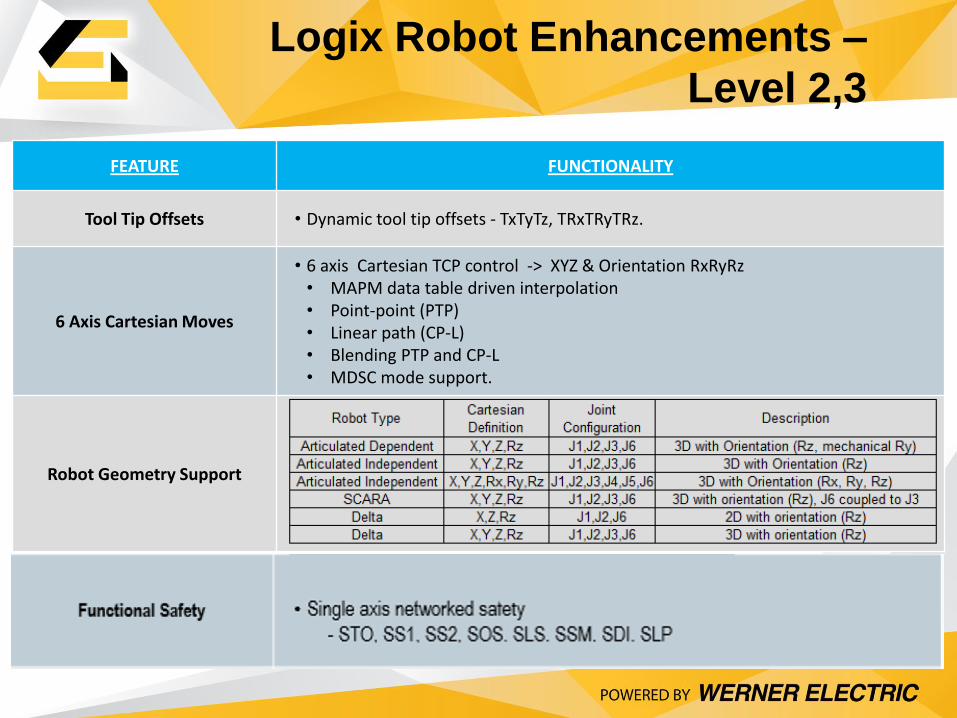
Logix Robot Enhancements –
Level 2,3
FEATURE FUNCTIONALITY
Tool Tip Offsets • Dynamic tool tip offsets - TxTyTz, TRxTRyTRz.
6 Axis Cartesian Moves
• 6 axis Cartesian TCP control -> XYZ & Orientation RxRyRz • MAPM data table driven interpolation • Point-point (PTP) • Linear path (CP-L) • Blending PTP and CP-L • MDSC mode support.
Robot Geometry Support
• The OEM Team can support OEM’s developing a Logix/Kinetix based Robotics solution. GOTC application engineers can provide assessment, consulting, training and guidance on design and implementation.
• Typical Robot Types • 2 D or 3D Delta – Codian or equivalent and Custom design
• Custom Robotic configurations (requires technical assessment)
• H-Bot Robot configurations
• Tools and Templates • Path Object – template for motion path planning
• Native instructions – MCT and MCLM’s
• Custom forward and inverse Kinematics routines for non-native Kinematics
OEM Team Support
Robotics Applications
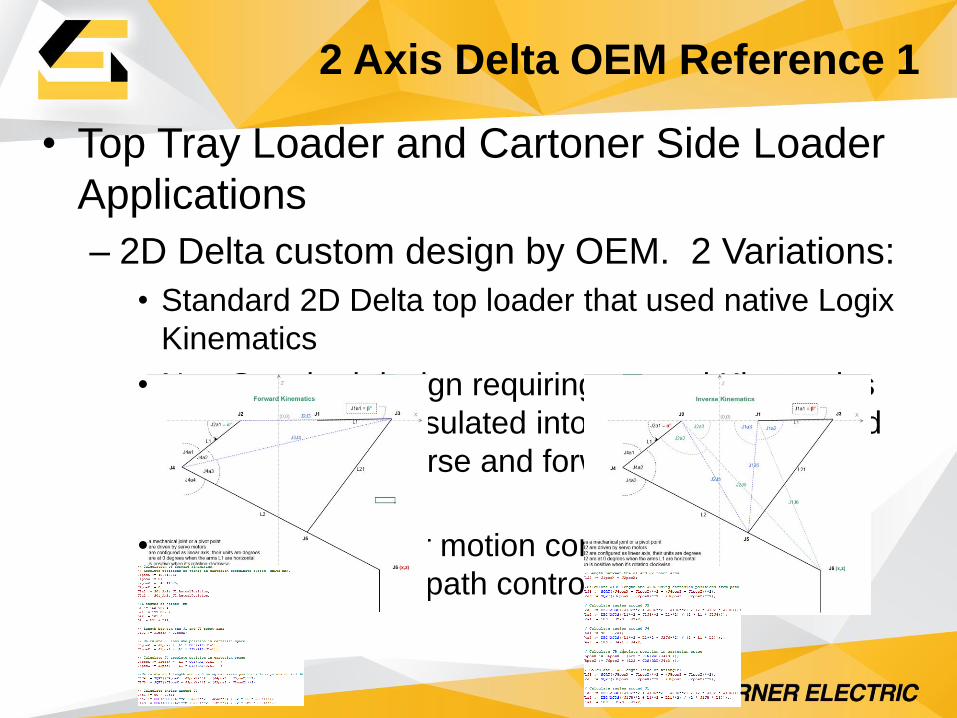
2 Axis Delta OEM Reference 1
• Top Tray Loader and Cartoner Side Loader
Applications
– 2D Delta custom design by OEM. 2 Variations:
• Standard 2D Delta top loader that used native Logix
Kinematics
• Non-Standard design requiring manual Kinematics
calculations encapsulated into an AOI or structured
text. Used for inverse and forward Kinematics
calculations.
• Coordinated vector motion control (MCLM
instruction) for the path control
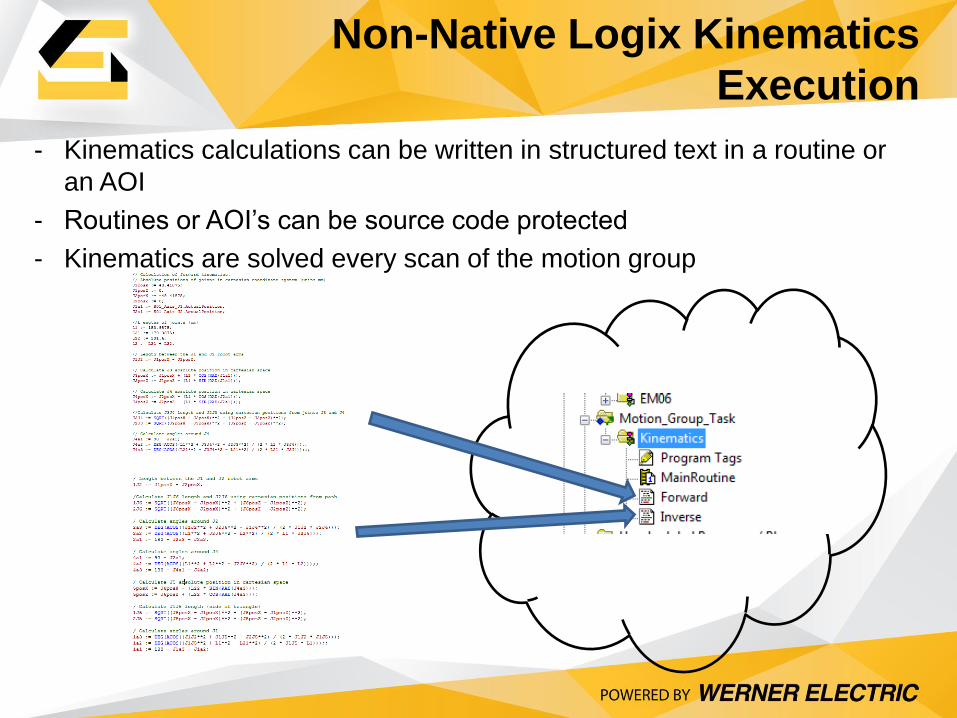
Non-Native Logix Kinematics
Execution
- Kinematics calculations can be written in structured text in a routine or
an AOI
- Routines or AOI’s can be source code protected
- Kinematics are solved every scan of the motion group

3 and 4 Axis Delta OEM Reference 2
• 3D 4 axis Delta Codian Robots for In-feed section of Cartoning Machines
– Single 3D 4 axis Delta with one in-feed conveyor and one out-feed conveyor.
• Vision system for random product on in-feed conveyor
• Product tracking control in Logix. – Three 3D 4 Axis Deltas in tandem for load balancing
• Random product mult-infeed conveyors for product variation.
• Single or dual out-feed flighted conveyor
• Manage product mix on the out-feed conveyor for cartoning
• Codian Robots using native Kinematics and vector motion path planning (MCLM instruction).
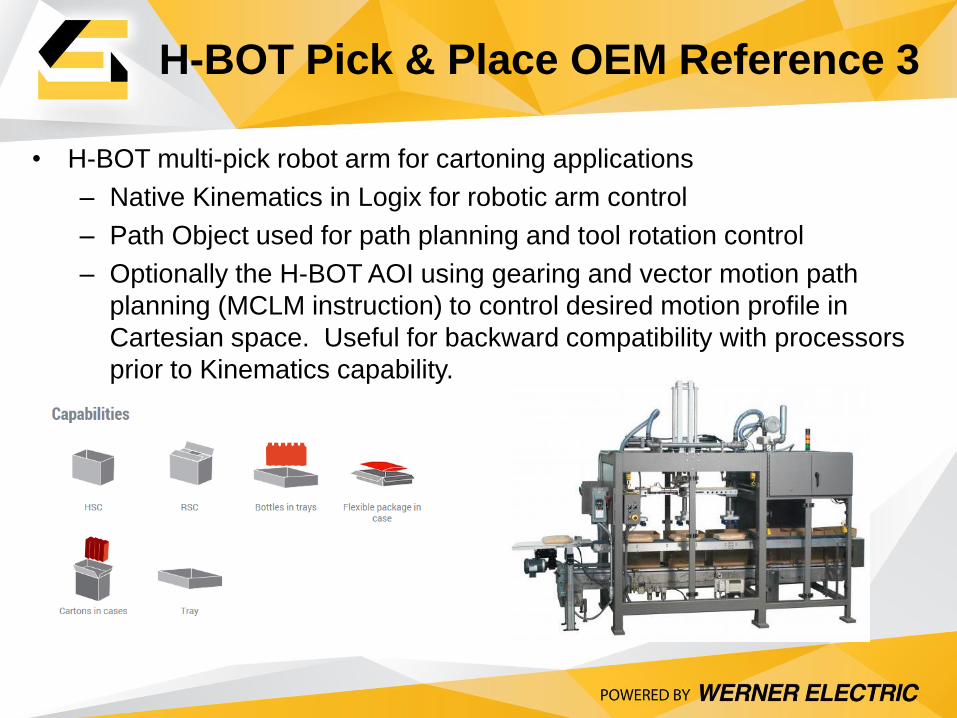
H-BOT Pick & Place OEM Reference 3
• H-BOT multi-pick robot arm for cartoning applications
– Native Kinematics in Logix for robotic arm control
– Path Object used for path planning and tool rotation control
– Optionally the H-BOT AOI using gearing and vector motion path
planning (MCLM instruction) to control desired motion profile in
Cartesian space. Useful for backward compatibility with processors
prior to Kinematics capability.
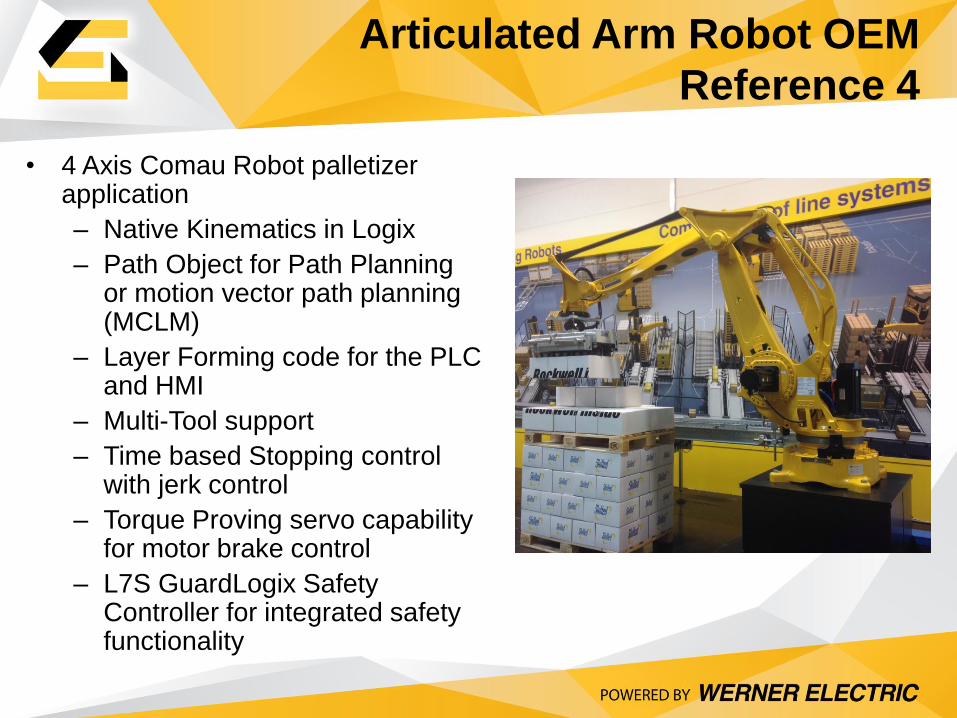
Articulated Arm Robot OEM
Reference 4
• 4 Axis Comau Robot palletizer application
– Native Kinematics in Logix
– Path Object for Path Planning or motion vector path planning (MCLM)
– Layer Forming code for the PLC and HMI
– Multi-Tool support
– Time based Stopping control with jerk control
– Torque Proving servo capability for motor brake control
– L7S GuardLogix Safety Controller for integrated safety functionality
Dynamic and fast lightweight construction
One integral control system needed, cutting the price,
maintenance cost and physical space.
Very fast lead times (4-6 weeks).
Robots come with gearboxes and can optionally include
servo motors.
Quality – Dynamic – Innovative – Low Maintenance
Lightweight Construction
Codian Robotics:
Innovative Robot Technology

D2 Series
Model Work Envelope Payload
D2-800 850 mm 2 kg
D2-1000 1000 mm 30 kg
D2-1500 1500 mm 30 kg
D2-1000 Twin 1000 mm 40 kg
D2-1500 Twin 1500 mm 40 kg
• Movement in two axis, rotation optional • Ideal for many Pick and Place packaging
processes • Designed for applications up to 40 kg • ISO gripper mount • ISO standard mount for servo motors and
gear boxes • Very low maintenance • Materials: carbon fiber, stainless steel,
anodized aluminium
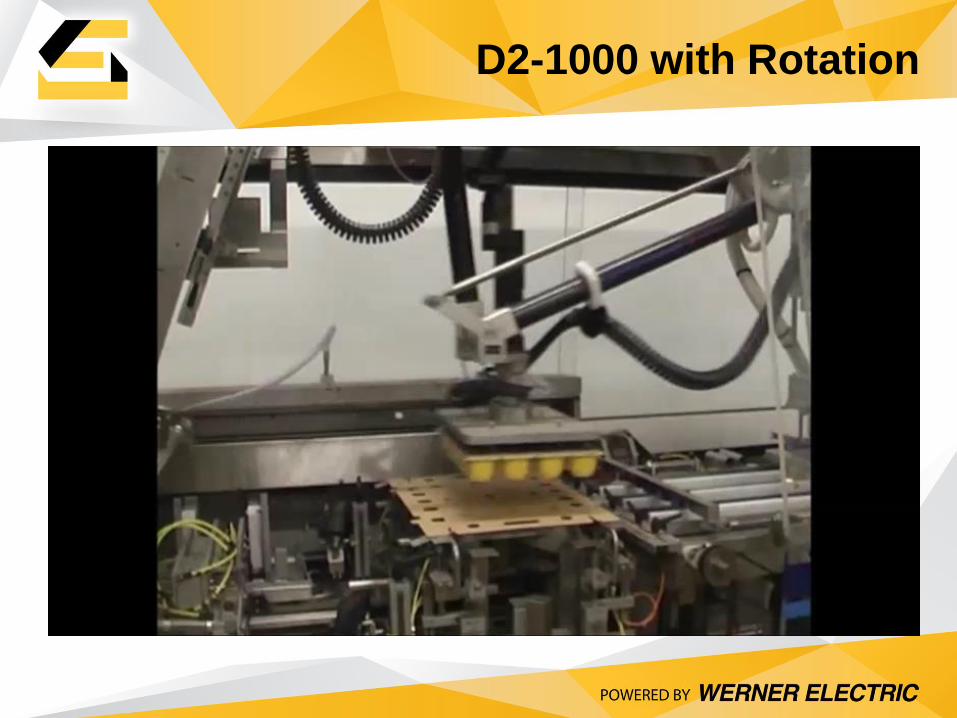
D2-1000 with Rotation

D4 Series
Model Work Envelope Payload
D4-500 500 mm 1 kg
D4-800-2 800 mm 3 kg
D4-1100-2 1100 mm 3 kg
D4-1300-2 1300 mm 3 kg
D4-1600 1600 mm 10 kg
• Three axis, rotation optional
• Open platform for servo motors and
control systems
• Ideal for applications up to 10 kg
• ISO gripper mount.
• ISO standard mount for servo motors
and gear boxes
• Materials: carbon fiber, anodized
aluminium, titanium and plastic
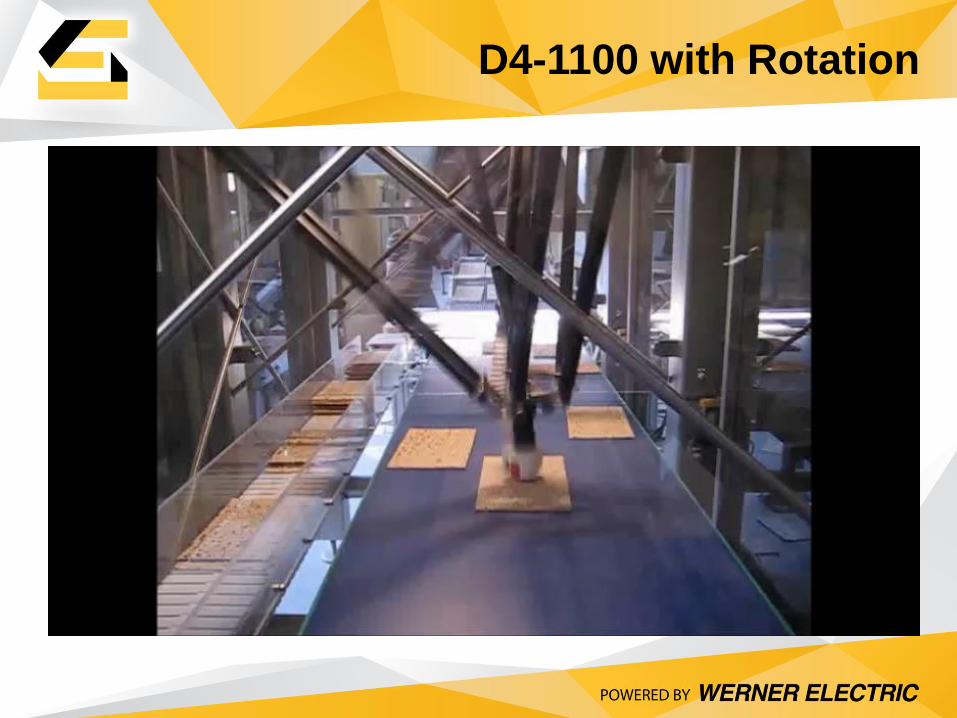
D4-1100 with Rotation

D5 Series
• Five axis of rotation.
• Allows for 360 degrees of rotation.
• Open platform for servo motors and
control systems.
• Ideal for applications up to 1.5 kg.
• ISO gripper mount
• ISO standard mount for servo motors
and gear boxes
• Materials: carbon fiber, anodized
aluminium, titanium and plastic.
Model Work Envelope Payload
D5-800 800 mm 1.5 kg
D5-1100 1000 mm 1.5 kg
D5-1300 1300 mm 1.5 kg
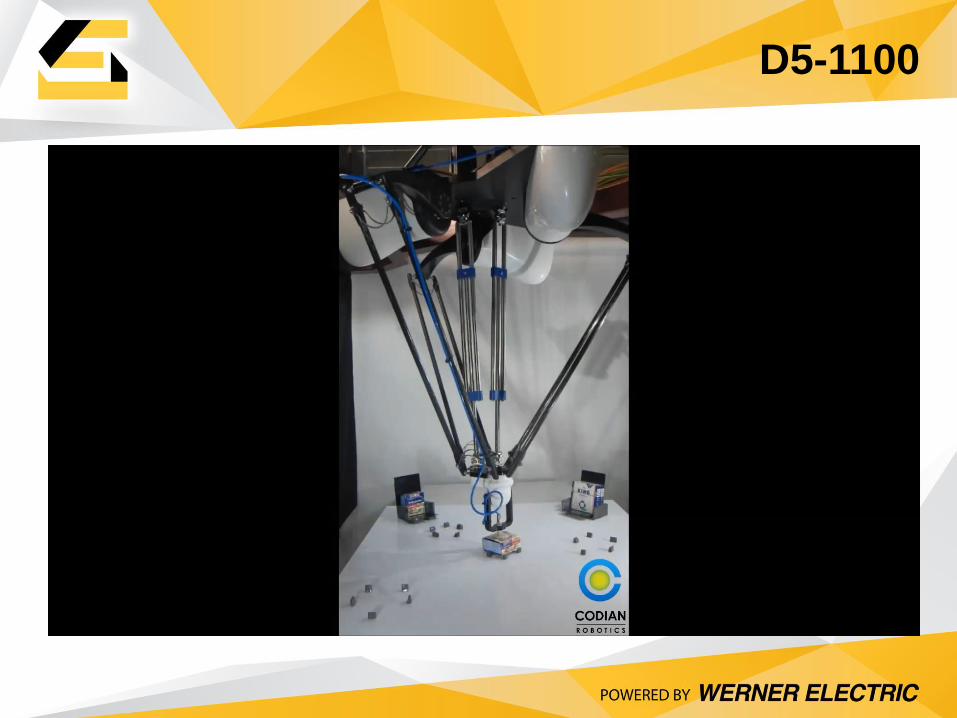
D5-1100

Hygienic Design
• Fully enclosed water tight system for gearboxes, servo motors and cables.
• Standard Gearboxes and Motors. • Smooth rounded surface, easy to
clean, CIP (Cleaning In Place). • IP69K standard. • Materials: titanium, 316L stainless steel
and POM.
Model Work Envelope Payload
D4-800 HD 800 mm 3 kg
D4-1100 HD 1000 mm 3 kg
D4-1300 HD 1300 mm 3 kg
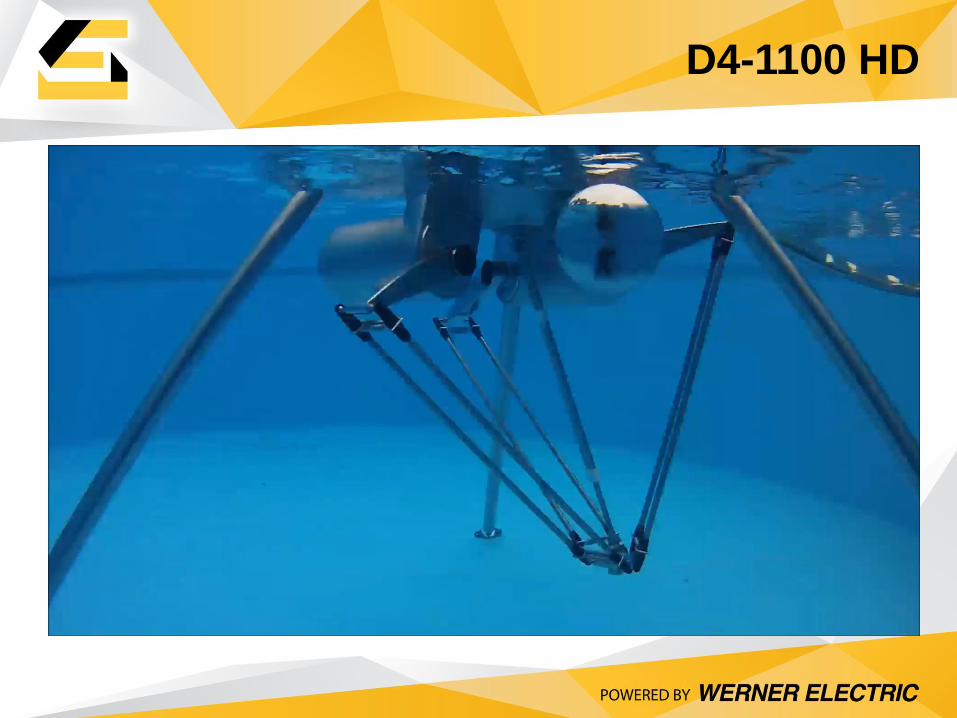
D4-1100 HD
Motion & Mechatronics Solution Area
• Codian D2 & D4 Robots
Tradeshow
Copyright © 2013 Rockwell Automation, Inc. All Rights Reserved.
www.rockwellautomation.com
Follow ROKAutomation on Facebook & Twitter. Connect with us on LinkedIn.
Rev 5058-CO900D
Thank You!





























