Embed Size (px)
Citation preview

Robust walking with a simple IP modelPetr Zaytsev, and Andy Ruina
University of Michigan, Cornell [email protected]
Summary. How do robustness and energy econ-omy in walking trade-off with each other? We ad-dress this question using concepts from Viabilitytheory and a simple point-mass model of walking.For this model, we find all states and next-stepcontrols such that a given desired speed can bereached without falling. We use the results to finda walking controller for Cornell Ranger that is, insome way, maximally robust and also provides en-ergy economy. Also, our results suggest that tak-ing larger steps is generally advantageous to cancelperturbations.
Introduction. A good walking robot has to berobust, i.e. able to avoid falling in most practicalsituations, and also use little energy to walk. How-ever, no robot to-date is both robust (as BostonDynamics’ robots) and energy-effective (as CornellRanger [1]). So what are the trade-offs betweenthese, and possibly other, desired characteristicsof walking? Our goal here is to help understandingof such trade-offs and use this to help the designof robust walking controllers.
One approach is to assess all feasible roboticstates with respect to different objectives. Thiswould show areas in the state space that are morebeneficial to be at with respect to, say, robustnessor energetics. This approach is in the spirit ofViability theory [2], where one of the key conceptsis the viability kernel, the set of all states of thesystem from which a failure can be avoided.
Here we use viability theory concepts with asimple model of walking, the Inverted Pendulum(IP) in 2D [3]. We use the results to design a ro-bust controller for a simple model of Ranger.
Background concepts. We study walking us-ing discrete step-to-step dynamics. We define astep to start at (the Poincare section to be at)mid-stance, where the stance leg is vertical.
Our primary tool of analysis is controllable andextended controllable regions [4]. Controllable re-gions are areas in the state space. For a given mo-tion goal, such as walking at a given speed, theyshow from which states the robot can, using fea-sible controls, reach the goal in one, two, or moresteps and without falling. The n-step controllableregion Cn is the set of all states from where this
can be done in n steps or fewer. The limiting re-gion C∞ is all states from which the target can bereached eventually; C∞ is usually almost equal tothe viability kernel of the system [5].
Extended controllable regions show specific con-trols for the next step that allow the robot to reachthe target. The extended n-step controllable re-gion Cn is all combinations (q, u) of states q andnext-step controls u, such that the robot can reachthe target within n steps in total. The limiting re-gion C∞ is all states and next-step controls so thatthe target can be reached eventually.
Planar IP model. We model Ranger with theIP model in 2D. The model has two rigid masslesslegs and a point-mass at the hip. The swing legcan be instantaneously placed to any desired posi-tion, thus determining the step length. Collisionsare assumed instantaneous and there is no dou-ble stance. Just before the collision an impulsivepush-off is applied along the trailing leg.
The model has one state variable at mid-stance,velocity v, and two controls per step, the step sizexst and push-off magnitude p. We only considermotions forward, only walking (no flight), and thatthe robot reaches mid-stance at each step. Vio-lation of these requirements is regarded as a fail-ure. As a proxy for actuator limitations in Ranger,we also impose an upper bound on the push-off,p<pmax, and a lower bound on step-time, timefrom mid-stance to heel-strike (a proxy for limitedhip torque in Ranger), tst>tst,min> 0. We userough estimates for pmax and tst,min from simula-tions of a full model of Ranger [1]. We also boundthe largest physically feasible step, xst<xmax.
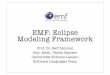
The extended controllable regions of the IPmodel are three-dimensional (one state and twocontrol variables). For ease of presentation, weonly show in Fig. 1b projections Cxst
n of theseregions onto the coordinate plane (v, xst); C
xstn
is all velocities and next step-size controls suchthat, with proper push-offs, the target is reachablewithin n steps. The target speed vt corresponds toRanger’s 65 km walk and is approximately energy-optimal speed of walking for Ranger. For velocitiesand with step-sizes outside Cxst
n the robot fails.Projections of Cxst
n onto the velocity axis are thecontrollable regions Cn in Fig. 1a.

next step-size
xst
midstance velocity
midstance velocity
0 0.2 0.4 0.6 0.8 10
0.5
1
1.5
0.19 target velocity
0 0.2 0.4 0.6 0.8 1
zero leg tension just before next collision
0.35
C1
C2 = C∞
C_
1xst
C_
2xst
nominal trajectory
max. allowed step-size
min. allowed step-time
C_
∞xst
(a) Controllable regions
(b) Extended controllable regions: step-size controls
v
v
Figure 1: n-step controllability of the IP model.
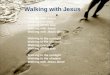
Results: robust walking controller. We il-lustrate the design of the step-size controller here;the push-off controller design is similar, see [5].
A viable step-size controller can be defined by afunction of mid-stance speed v whose graph is en-tirely inside the region Cxst
∞ , e.g. as in Fig. 2. Wewant a controller (a curve inside Cxst
∞ ) that pro-vides maximum robustness and also convergenceto the desired target trajectory.
Robustness. We model various disturbances anderrors as random changes to the robot speed v andstep size xst. If such random changes move thepoint (v, xst) outside the region Cxst
∞ , the robotfails. Hence, we model robustness as distance tothe boundary of Cxst
∞ : for points (v, xst) that arecloser to the boundary, it is more likely for therobot to fail after a disturbance. Thus, robustcontrollers are those farther inside the region Cxst
∞ .
Convergence. We look at how much closer therobot gets to the target after each step. We look atthe ratio νx of the error in speed after one step tothe initial error. Fig. 2 shows a color map of νx forall viable v and xst and assuming the best viablepush-off: lighter areas signify faster convergenceand darker areas slower convergence or divergencefrom the target.
Thus, the desired step-size controller curve isinside Cxst
∞ (viability), farther from the bound-aries of Cxst
∞ (robustness), and in lighter areas ofCxst
∞ (convergence); it also has to pass throughthe target (energy-optimal nominal trajectory).We ‘heuristically’ pick the controller shown inFig. 2: it is an absolute-value function whose rightbranch is approximately parallel to the boundary
0 0.4 0.6 0.8 10
0.5
1
1.5
0.2
νx = 0
νx = 0.62
νx = 1
proposed step-size controller
constant distancefrom viability boundary
energy-e�cient nominal trajectory
robustness
at most 62% of perturbation remains after one step
convergence
νx =velocity error after 1 step
initial velocity error
max. allowed step-size
min. allowed step-time
vt = 0.19nominal speed
x *s t = 0.35
nominal step-size
midstance velocity, v
next
step
-siz
e, x
st
d
α = 0.82xst = x*st + α |v - vt|
Figure 2: Robust step-size controller for Ranger.
of Cxst∞ . With this controller, and a similarly-
designed push-off controller, the robot tolerateserrors of up to 48% in speed and 24% in step-size,and has an acceptable rate of convergence.
Note that our controller always prefers stepslarger than the nominal, suggesting an advantageof taking larger steps for disturbance rejection.
Work in progress. The controller in Fig. 2 ismanually picked and does not explicitly accountfor energy economy. Currently we are working ondefining, and solving, a more formal optimizationproblem that accounts for both robustness and en-ergetic cost. We will also consider different controlhorizons, i.e. number of steps to reach the target,thus accounting for the convergence speed.
We hope that the resulting optimal controllerwill help to better understand the trade-offs inbipedal walking, and also will further justify our‘Two steps is enough’ result [4].
References
[1] P.A. Bhounsule. A controller design frameworkfor bipedal robots. PhD thesis, Cornell Univer-sity, 2012.
[2] Jean Pierre Aubin, Alexandre M Bayen, andPatrick Saint-Pierre. Viability theory: new di-rections. Springer, 2011.
[3] A.D. Kuo. Energetics of actively powered lo-comotion using the simplest walking model.Journal of biomechanical engineering, 2002.
[4] Petr Zaytsev, S Javad Hasaneini, and AndyRuina. Two steps is enough: no need to planfar ahead for walking balance. ICRA, 2015.
[5] Petr Zaytsev. Using controllability of simplemodels to generate maximally robust walking-robot controllers. PhD thesis, Cornell Univer-sity, 2015.