Embed Size (px)
Citation preview

INTERNATIONAL JOURNAL OF ROBUST AND NONLINEAR CONTROLInt. J. Robust Nonlinear Control 2008; 18:69–87Published online 18 April 2007 in Wiley InterScience (www.interscience.wiley.com). DOI: 10.1002/rnc.1204
Robust tracking control for a class of MIMO nonlinearsystems with measurable output feedback
Ya-Jun Pan1,*,y, Horacio J. Marquez2 and Tongwen Chen2
1Department of Mechanical Engineering, Dalhousie University, Halifax, NS, Canada B3J 2X42Department of Electrical and Computer Engineering, University of Alberta, Edmonton, AB, Canada T6G 2V4
SUMMARY
This paper proposes a robust output feedback controller for a class of nonlinear systems to track a desiredtrajectory. Our main goal is to ensure the global input-to-state stability (ISS) property of the tracking errornonlinear dynamics with respect to the unknown structural system uncertainties and external disturbances.Our approach consists of constructing a nonlinear observer to reconstruct the unavailable states, and thendesigning a discontinuous controller using a back-stepping like design procedure to ensure the ISSproperty. The observer design is realized through state transformation and there is only one parameter tobe determined. Through solving a Hamilton–Jacoby inequality, the nonlinear control law for the firstsubsystem specifies a nonlinear switching surface. By virtue of nonlinear control for the first subsystem, theresulting sliding manifold in the sliding phase possesses the desired ISS property and to certain extent theoptimality. Associated with the new switching surface, the sliding mode control is applied to the secondsubsystem to accomplish the tracking task. As a result, the tracking error is bounded and the ISS propertyof the whole system can be ensured while the internal stability is also achieved. Finally, an example ispresented to show the effectiveness of the proposed scheme. Copyright # 2007 John Wiley & Sons, Ltd.
Received 8 September 2004; Revised 22 February 2007; Accepted 13 March 2007
KEY WORDS: tracking control; input-to-state stability; output feedback; nonlinear systems; uncertainties;nonlinear observers
1. INTRODUCTION
Output feedback tracking control has been the subject of constant research over the past severaldecades. Despite these efforts, robust tracking of general nonlinear systems remains an open
*Correspondence to: Ya-Jun Pan, Department of Mechanical Engineering, Dalhousie University, Halifax, NS, CanadaB3J 2X4.yE-mail: [email protected]
Contract/grant sponsor: NSERC and Syncrude Canada
Copyright # 2007 John Wiley & Sons, Ltd.

problem. In the literature, several approaches have been proposed to deal with the outputfeedback control in the presence of structured or unstructured uncertainties: adaptive controlapproach [1, 2], variable structure control approach [3], and output dynamics controller withalmost disturbance decoupling [4], etc. However, the adaptive control approach can only dealwith systems with constant parametric uncertainties. Oh and Khalil considered a nonlinearsingle-input single-output (SISO) system that can be represented by an input–output model andapplied a tracking error estimator [3]. In [4], Marino and Tomei considered SISO systems withnonlinearities that depend on outputs only.
Assuming that it is not possible to have a sensor for each state variable, if the controller is inthe state feedback form, then it is necessary to design a state observer to estimate the internalstates. Several observers have been proposed for linear and nonlinear systems. In the presence ofdisturbances and model uncertainty, high-gain observer has the advantage that they can acquirethe state information while neglecting the influence of these effects. In [3, 5, 6], different types ofobservers based on high-gain estimation error feedback were proposed for SISO systems andmultiple-input multiple-output (MIMO) systems with both linear or highly nonlinear terms.Due to their high gains in the feedback form, these observers are effective in ensuring theconvergence of estimation errors so that asymptotic states can be obtained for the controllerdesign.
In sliding mode control (SMC), switching surface design and discontinuous reaching controllaw are two of the control issues. A common practice in SMC is to design a switching surfaceaccording to the null space dynamics, which must ensure a stable sliding manifold when thesystem is in the sliding mode [7]. For known linear time-invariant (LTI) systems, such design canbe done by pole placement [8] or LQR based approach [9]. For known nonlinear systems,nonlinear optimal design can be applied [10]. However, if there exist uncertainties in the nullspace nonlinear dynamics, switching surface design becomes extremely difficult. Traditionally,the reaching control law is to force the system to reach and stay on the switching surface.Nevertheless, this feature alone is no longer sufficient in the presence of unmatcheduncertainties. Due to the effect of the unmatched uncertainties, the nonlinear dynamics maybecome divergent in a period shorter than the reaching time, if the input-to-state stability (ISS)property does not hold during the reaching phase. Hence, ISS property should be guaranteedeither in the sliding phase or in the reaching phase.
In this paper, a class of nonlinear systems with null space dynamics and range space dynamicsare considered for the tracking control task. Assuming that the full state is not available formeasurement, the main objective of the paper is to ensure global ISS of the tracking errornonlinear dynamics while achieving a small tracking error bound. The features of our approachare the following: (i) a nonlinear observer is designed in which only one parameter needs to bedetermined; (ii) the resulting sliding manifold in the sliding phase possesses the desired ISSproperty and to certain extent the optimality through solving a Hamilton–Jacoby inequality;(iii) associated with the new switching surface, the SMC applied to the second subsystemachieves the desired tracking. As a result, the tracking error is bounded and the ISS property ofthe whole system can be ensured while the internal stability of the system states is also ensured.Usually, a discontinuous term is used to handle the matched L1½0;1Þ type system disturbancewhere the upper-bound knowledge is available [11, 12]. However, in this paper, a discontinuousterm is used to ensure convergence of the error dynamics resulting from the observer and thedesired trajectory in which there are no uncertain terms in the error dynamics. In the example, itis shown that the tracking error is small and bounded under the proposed controller.
Y.-J. PAN, H. J. MARQUEZ AND T. CHEN70
Copyright # 2007 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control 2008; 18:69–87
DOI: 10.1002/rnc

The paper is organized as follows. In Section 2, the problem formulation is presented whilesome notation and preliminaries are listed. In Section 3, a nonlinear observer is designed indetail and the property of the observer is also analysed. In Section 4, a discontinuous controlleris proposed and even more the stability analysis is given. Section 5 shows an illustrativeexample. Section 6 draws the conclusions.
2. PROBLEM FORMULATION
2.1. Notation and preliminaries
In this section, we introduce our notation and collect some preliminary results that will beneeded later.
Rn denotes the n-dimension real vector space; jj � jj is the Euclidean norm or induced matrixnorm; lmaxðAÞ and lminðAÞ denote the maximum and minimum eigenvalue of the matrix A;respectively; fAg%n�%n represents the first n rows and n columns in A; and fAg
%m�
%n represents the last
m rows and n columns in A: Aþ denotes the left inverse of the matrix A 2 Rn�m such thatAþA ¼ I :
Positive definiteness ðP > 0Þ: Let P 2 Rn�n be a symmetric matrix. P is said to be positivesemidefinite if xTPx50;8x 2 Rn: If in addition xTPx=0;8x=0; then P is said to be positivedefinite. The matrix P is positive definite if and only if all its eigenvalues are positive.
Class K; class K1; and class KL functions [13]: A continuous function g: ½0; aÞ ! ½0;1Þ issaid to belong to class K if it is strictly increasing and gð0Þ ¼ 0: It is said to belong to class K1
if a ¼ 1 and gðrÞ ! 1 as r!1: It is said to belong to class KL if, for each fixed s; themapping gðr; sÞ belongs to class K with respect to r and, for each fixed r; the mapping gðr; sÞ isdecreasing with respect to s and gðr; sÞ ! 0 as s!1:
ISS [14, 15]: Consider a nonlinear dynamical system of the form
’x ¼ fðx; uÞ ð1Þ
The system in (1) is said to be locally input-to-state stable if there exist a class KL function b; aclass K function g; and constants k1; k2 2 Rþ such that
jjxðtÞjj4bðjjx0jj; tÞ þ gðjjuT ð�ÞjjL1Þ 8t50; 04T4t ð2Þ
for all x0 2 D and u 2 Du satisfying: jjx0jj5k1 and supt>0jjuT ðtÞjj ¼ jjuT jjL15k2; 04T4t: It issaid to be input-to-state stable or globally ISS if D ¼ Rn; Du ¼ Rm; and (2) is satisfied for anyinitial state and any bounded input u:
ISS Lyapunov functions [14, 15]: A continuous function V : D! R is an ISS Lyapunovfunction on D for (1) if and only if there exist class K functions c1; c2; c3; and c4 such that thefollowing two conditions are satisfied:
c1ðjjxjjÞ4VðxÞ4c2ðjjxjjÞ 8x 2 D; t > 0
DxVðxÞfðx; uÞ4� c3ðjjxjjÞ þ c4ðjjujjÞ 8x 2 D; u 2 Du
V is an ISS Lyapunov function if D ¼ Rn; Du ¼ Rm; and c1; c2; c3; and c4 2K1:
ROBUST TRACKING CONTROL FOR A CLASS OF MIMO NONLINEAR SYSTEMS 71
Copyright # 2007 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control 2008; 18:69–87
DOI: 10.1002/rnc

2.2. Problem formulation
The following MIMO nonlinear cascade system with uncertainties is considered:
’x1 ¼ f1ðt;x1Þ þ B1ðtÞx2 þ G1ðt;x1Þd1ðtÞ
’x2 ¼ f2ðt;xÞ þ B2ðtÞ½uþ gðt;xÞ� þ G2ðt; xÞd2ðtÞ
y ¼ x1
ð3Þ
where x1 2 Rn is the null space dynamics and x2 2 Rm is the range space dynamics; u 2 Rm
denotes the control input; d1 2 Rp; and d2 2 Rq are the external disturbances. The mappingsf1ðt; x1Þ 2 Rn; f2ðt; xÞ 2 Rm; B1ðtÞ 2 R
n�m; B2ðtÞ 2 Rm�m; G1ðt;x1Þ 2 Rn�p; and G2ðt; xÞ 2 Rm�q
are known. gðx; tÞ 2 Rm is the matched uncertainty. We assume that m4n: System (3) isassumed to satisfy the following assumptions.
Assumption 1There exist two positive constants a1 and a2 such that 8x1 2 Rn; 8t > 0;
05a21Im4BT1 ðtÞB1ðtÞ4a22Im ð4Þ
where Im is the identity matrix. The time derivative of B1ðtÞ is uniformly bounded. B2ðtÞ isassumed to be invertible and uniformly bounded. The functions G1ðt;x1Þ and G2ðt; xÞ areuniformly bounded.
Assumption 2The uncertainties d1ðtÞ; d2ðtÞ; and gðx; tÞ are bounded as
jd1ðtÞj4b1; jd2ðtÞj4b2; jgðx; tÞj4bZ ð5Þ
where b1; b2; and bZ are known positive constants.
Assumption 3The mapping functions f1ðt; x1Þ and f2ðt;xÞ are globally Lipschitz with respect to x1 and x;respectively.
2.3. Control objective
The system is required to track the known reference model: y) yd ¼ x1d ; i.e. the x1 subsystemis required to track the desired reference model
’x1d ¼ fdðx1d ; rðtÞ; tÞ ð6Þ
where rðtÞ is a smooth reference input. Define the tracking error as z1 ¼ x1 � x1d : The controlobjective is to obtain ISS stability with respect to the disturbances and attenuate the disturbanceinfluence d ¼ ½d1; d2;g�
T on the tracking error z1: Furthermore, we have the following assumption.
Assumption 4There exists a function g1ð�Þ such that the system dynamics ’n ¼ g1ðn; tÞ is asymptotically stable.Then we can get the following equation:
f1ðt;x1Þ � fdðt; x1d ; rðtÞÞ ¼ g1ðt; z1Þ þ B1ðtÞfðt;x1;x1d ; rðtÞÞ ð7Þ
where fð�Þ is a smooth function with respect to its arguments.
Y.-J. PAN, H. J. MARQUEZ AND T. CHEN72
Copyright # 2007 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control 2008; 18:69–87
DOI: 10.1002/rnc

From (3) and (6), the system with the error dynamics of z1 can be expressed as
’z1 ¼ g1ðt; z1Þ þ B1ðtÞ½x2 þ fðx1;x1d ; rðtÞ; tÞ� þ G1ðt;x1Þd1ðtÞ
’x2 ¼ f2ðt;xÞ þ B2ðtÞ½uþ gðx; tÞ� þ G2ðt;xÞd2ðtÞ
y ¼ x1
ð8Þ
Note that z1 ¼ y� x1d is also available.
3. NONLINEAR OBSERVER DESIGN
For system (3), we can first construct a nonlinear observer according to the work in [6, 16]. Theidea is to construct an observer through a state transformation to convert the nonlinear systeminto a new form such that the observer gain can be designed in a straightforward manner. Theobserver design in this paper is an extension of the work in [6]. The extension of the observerconstruction is applied to the system with a more general representation of the disturbance termwhile B1ðtÞ is not a state-dependent function.
The system in (3) can be rewritten as follows:
’x ¼ fðt;xÞ þ hðt; uÞ þ BðtÞxþ Gðt; xÞdðx; tÞ
y ¼Cx :¼ x1ð9Þ
where
fðt;xÞ ¼f1ðt;x1Þ
f2ðt;xÞ
" #; hðt; uÞ ¼
0
B2ðtÞu
" #; BðtÞ ¼
0 B1ðtÞ
0 0
" #
Gðt; xÞ ¼G1ðt; x1Þ 0 0
0 G2ðt;xÞ B2ðtÞ
" #; dðx; tÞ ¼
d1ðtÞ
d2ðtÞ
gðt;xÞ
2664
3775; CT ¼
In
0m
" #
Define the transformation matrix TðtÞ; the matrices Dy; A; and %C as
TðtÞj2n�ðnþmÞ ¼In 0
0 B1ðtÞ
" #; Dy ¼
In 0
0In
y
264
375; A ¼
0 In
0n 0
" #; %CT ¼
In
0n
" #
Hence,
wðtÞ ¼ TðtÞx ¼x1
B1ðtÞx2
" #; TðtÞBðtÞ ¼ ATðtÞ; DyAD
�1y ¼ yA; %CT %CDy ¼ %CT %C
ROBUST TRACKING CONTROL FOR A CLASS OF MIMO NONLINEAR SYSTEMS 73
Copyright # 2007 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control 2008; 18:69–87
DOI: 10.1002/rnc

Denote TþðtÞ as the left inverse of the matrix TðtÞ: The w system can be written as
’wðtÞ ¼TðtÞ’xþ ’TðtÞx
¼TðtÞ½fðt;xÞ þ hðt; uÞ þ BðtÞxþ Gðt;xÞdðx; tÞ� þ ’TðtÞx
¼Awþ TðtÞ½fðt;xÞ þ hðt; uÞ þ Gðt;xÞdðx; tÞ� þ ’TðtÞx
¼Awþ T ½fðt;TþwÞ þ hðt; uÞ þ Gðt;TþwÞdðTþw; tÞ� þ ’TðtÞTþw
y ¼ %Cw
ð10Þ
Then the observer for the transformed w system in (10) can be constructed as
’#wðtÞ ¼A #wþ T ½fðt;Tþ #wÞ þ hðt; uÞ� þ ’TðtÞTþ #w
þ yD�1y P�1 %CTðy� %C #wÞ ð11Þ
where P is the symmetric positive-definite solution of the following algebraic Lyapunovequation:
Pþ ATPþ PA� %CT %C ¼ 0 ð12Þ
Theorem 1Assume that the system in (9) satisfies Assumptions 1 and 2. Then the estimation error of thestates has the following property:
jjexðtÞjj ¼ jjxðtÞ � #xðtÞjj4kyjjexð0Þjj þ bdd ð13Þ
where
ky ¼ mþt y
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffilmaxðPÞ
lminðPÞ
se�ððy�c1Þ=2Þtmt; bd ¼ mþt
c2y
ðy� c1ÞffiffiffiffiffiffiffiffiffiffiffiffiffiffiffilminðPÞ
p ; d ¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffib21 þ b22 þ b2Z
q
and c15y; c2; mþt ; mt are positive constants.
ProofSee Appendix. &
From (10) and ’#w ¼ TðtÞ’#xþ ’TðtÞ #x; the observer to the original coordinate is
’#xðtÞ ¼Tþ½’#w� ’TðtÞ #x�
¼TþfA #wþ T ½fðt;Tþ #wÞ þ hðt; uÞ� þ ’TðtÞTþ #wþ yD�1y P�1 %CTðy� %C #wÞ � ’TðtÞ #xg
¼TþAT #xþ fðt; #xÞ þ hðt; uÞ þ yD�1y P�1 %CTðy� C #xÞ
¼BðtÞ #xþ fðt; #xÞ þ hðt; uÞ þ yTþD�1y P�1 %CTðy� C #xÞ
y ¼ x1
ð14Þ
Y.-J. PAN, H. J. MARQUEZ AND T. CHEN74
Copyright # 2007 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control 2008; 18:69–87
DOI: 10.1002/rnc

Hence, the estimation error dynamics in the x-coordinate with exðtÞ ¼ xðtÞ � #xðtÞ becomes
’ex ¼ fðt;xÞ � fðt; #xÞ þ BðtÞx� BðtÞ #xþ Gðt;xÞdðx; tÞ � yTþðtÞD�1y P�1 %CTðy� C #xÞ
¼BðtÞex þ fðt;xÞ � fðt; #xÞ þ Gðt; xÞdðx; tÞ � yTþðtÞD�1y P�1 %CTCex
Remark 1From (13) in Theorem 1, it is obvious that the larger the value of the observer gain y; the smallerthe value ky: Hence, the influence of the initial error condition jjexð0Þjj on the state estimationerror bound jjexðtÞjj is smaller.
Based on the nonlinear observer designed in this section, the corresponding controller is thenproposed in the next section to ensure the tracking performance of the nonlinear system withmeasurable output feedback.
4. CONTROLLER DESIGN AND STABILITY ANALYSIS
Before the controller design, we would like to rewrite the observer dynamics in (14) as
’#x1 ¼ f1ðt; #x1Þ þ B1ðtÞ #x2 þ wn
’#x2 ¼ f2ðt; #xÞ þ B2ðtÞuþ wm ð15Þ
where
wn ¼ fyTþðtÞD�1y P�1 %CTg%n�%nðy� C #xÞ ¼
4
Enðy� %C #wÞ ¼ En %Ce ¼ En %CD�1y %e
denotes the n-vector with the first n elements in the vector yTþðtÞD�1y P�1 %CTðy� C #xÞ and
wm ¼ fyTþðtÞD�1y P�1 %CTg
%m�
%nðy� C #xÞ ¼
4
Emðy� %C #wÞ ¼ Em %Ce ¼ Em %CD�1y %e
represents the m-vector with the last m elements in the vector yTþðtÞD�1y P�1 %CTðy� C #xÞ:According to the structure in (8), and comparing the desired target in (6) and the observer
dynamics in (15), we have the following error dynamics:
’#z1 ¼ g1ðt; #z1Þ þ B1ðtÞ½ #x2 þ fð #x1; x1d ; rðtÞ; tÞ� þ wn
’#x2 ¼ f2ðt; #xÞ þ B2ðtÞuþ wm
ð16Þ
where #z1¼4#x1 � x1d : For brevity, wn¼
4
H%e with H ¼ En %CD�1y :The controller design is separated into two steps: (1) design a desired #xn
2 for the errordynamics of the null space dynamics #z1 to facilitate the switching surface design; and (2) design acontroller u for the whole system in (16) with ISS stability.
Step 1: The task in this step is to find the desired #xn2 :
Theorem 2The tracking error norm, jjz1ðtÞjj; tends, in finite time, to a ball Br defined as
Br ¼ fz1ðtÞ : jjz1ðtÞjj4r23d2¼ rg
ROBUST TRACKING CONTROL FOR A CLASS OF MIMO NONLINEAR SYSTEMS 75
Copyright # 2007 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control 2008; 18:69–87
DOI: 10.1002/rnc

where r3 is a positive constant and d ¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffib21 þ b22 þ b2Z
q; if the following sliding mode
holds:
rð #x; x1d ; tÞ ¼ #x2 � #xn
2 ¼ #x2 þBT1 ðtÞ
r1ðt; #x1;x1dÞðD#z1VÞ
Tþ fð #x1; x1d ; rðtÞ; tÞ ð17Þ
where Vð#z1; tÞ; 8#z1 2 Rn; and t50 is a positive-definite smooth solution of the followingHamilton–Jacoby inequality:
DtV þ ðD#z1VÞg1 � ðD#z1VÞB1B
T1
r1ðD#z1VÞ
Tþ
1
4r21ðD#z1VÞHHTðD#z1VÞ
Tþ #zT1 #z140 ð18Þ
with r1ð#z1;x1d ; tÞ > 0:
ProofConstruct a second Lyapunov function as V1 ¼ V0 þ V ; where Vð#z1; tÞ; 8#z1 2 Rn; t50 is apositive-definite smooth Lyapunov function to be determined. Design
#xn
2 ¼ �BT1 ðtÞ
r1ðt; #x1;x1d ÞðD#z1VÞ
T� fð�Þ
The derivative of Vð�Þ is
’V ¼DtV þ ðD#z1VÞ½g1 þ B1ð #x2 þ fÞ þ wn�
¼DtV þ ðD#z1VÞg1 � ðD#z1VÞB1B
T1
r1ðD#z1VÞ
Tþ ðD#z1VÞH%e
¼DtV þ ðD#z1VÞg1 � ðD#z1VÞB1B
T1
r1ðD#z1VÞ
Tþ r21%e
T%e
þ1
4r21ðD#z1VÞHHTðD#z1VÞ
T�
1
2r1HT ðD#z1VÞ
T� r1%e
��������
��������2
4DtV þ ðD#z1VÞg1 � ðD#z1VÞB1B
T1
r1ðD#z1VÞ
Tþ r21%e
T%e
þ1
4r21ðD#z1VÞHHTðD#z1VÞ
Tð19Þ
If there is a solution of V such that the inequality in (18) is satisfied, then (19) becomes
’V4� #zT1 #z1 þ r21%eT%e ð20Þ
Using (20) and (A1), the derivative of V1 becomes
’V1 ¼ ’V0 þ ’V
4 � y%eTP%eþ %eTPDyT ½fðt;T
þwÞ � fðt;Tþ #wÞ� þ %eTPDyTGdþ %e
TPDy ’TTþD�1y %e
� #zT1 #z1 þ r21%eT%e
4 � ylminðPÞjj%ejj2 þ lmaxðPÞðlf þ ltÞjj%ejj
2 þ %eTPDyTGd� #zT1 #z1 þ r21%e
T%e
Y.-J. PAN, H. J. MARQUEZ AND T. CHEN76
Copyright # 2007 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control 2008; 18:69–87
DOI: 10.1002/rnc

4 � ½ylminðPÞ � r21 � lmaxðPÞðlf þ ltÞ�jj%ejj2 � #zT1 #z1
þ1
4r22%eTPDyTGðPDyTGÞ
T%eþ r22jjdjj
2
4 � ylminðPÞ � r21 � lmaxðPÞðlf þ ltÞ �1
4r22lmaxðPÞ
2lg
� �jj%ejj
2 � #zT1 #z1 þ r22jjdjj2
4 � #zT1 #z1 þ r22jjdjj2 ð21Þ
where y is selected such that
ylminðPÞ � r21 � lmaxðPÞðlf þ ltÞ �1
4r22lmaxðPÞ
2l2g50 ð22Þ
Using ex;1 ¼ x1 � #x1 ¼ z1 � #z1; jj#z1jj25jjz1jj2 � jjex;1jj2; and ex;1 ¼ %e1 according to ex ¼ TþD�1y %e;
(21) becomes
’V14� zT1 z1 þ jjex;1jj2 þ r22jjdjj
2 ¼ �zT1 z1 þ jj%e1jj2 þ r22jjdjj
24� zT1 z1 þ jj%ejj2 þ r22jjdjj
2 ð23Þ
From (A2), jj%ejj is bounded as
jj%ejj4lmaxðPÞlg
½lminðPÞy� lmaxðPÞðlf þ ltÞ�jjdjj ð24Þ
where lminðPÞy� lmaxðPÞðlf þ ltÞ > 0 according to (22). Hence, (23) becomes
’V14� zT1 z1 þ r23jjdjj2 ð25Þ
where
r3 ¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffir22 þ kd
qand
kd ¼l2g
lminðPÞ
lmaxðPÞy� ðlf þ ltÞ
� �2Note that limy!1 kd ¼ 0: Equation (25) shows that the tracking error norm in the z1 subsystem,jjz1ðtÞjj; tends, in finite time, to a ball Br defined by
Br ¼ fz1ðtÞ : jjz1ðtÞjj4r23d2¼ rg
where d ¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffib21 þ b22 þ b2Z
q: &
Step 2: The task in this step is to design the controller to ensure the ISS stability.
Theorem 3With the switching surface in (17) and the following SMC law,
u ¼ uc þ us ð26Þ
uc ¼ �B�12 ½Dtrþ ðDx1drÞ ’x1d þ Sðf1 þ B1 #x2 þ wnÞ þ f2 þ wm� ð27Þ
ROBUST TRACKING CONTROL FOR A CLASS OF MIMO NONLINEAR SYSTEMS 77
Copyright # 2007 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control 2008; 18:69–87
DOI: 10.1002/rnc

us ¼ �kdBT2 r
jjBT2 rjj
ð28Þ
where Sð #x1; x1d ; tÞ ¼ D #x1r 2 Rm�n; and kd > 0 is a positive constant, the system is globally ISSstable with respect to the external disturbance inputs and the tracking error norm, jjz1jj; isbounded in Br as defined in Theorem 2.
ProofConstruct a Lyapunov function V2 ¼
12rTr: Define Sð #x1;x1d ; tÞ ¼ D #x1r 2 Rm�n and D #x2r ¼ Im
holds. Then
’V2 ¼ rT ’r ¼ rT½Dtrþ ðDx1drÞ ’x1d þ ðD #x1rÞ’#x1 þ ðD #x2rÞ’#x2�
¼ rT½Dtrþ ðDx1drÞ’x1d þ ðD #x1rÞðf1 þ B1 #x2 þ wnÞ þ Imðf2 þ B2uþ wmÞ�
¼ rT½Dtrþ ðDx1drÞ’x1d þ Sðf1 þ B1 #x2 þ wnÞ þ f2 þ B2uþ wm�
4 � kdjjBT2 rjj ð29Þ
Define a new Lyapunov function V3ðx; #x; x1d ; tÞ ¼ V1ðx; #x;x1d ; tÞ þ V2ð #x;x1d ; tÞ: From (23) and(29), we have
’V3 ¼ ’V1 þ ’V24� zT1 z1 þ r23jjdjj2 � kdjjB
T2 rjj4� zT1 z1 þ r23jjdjj
2 ð30Þ
which implies that the system is globally ISS stable with respect to the external disturbance inputand the tracking error norm, jjz1jj; is bounded in Br in finite time. &
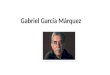
0 5 10 15 20 25
0
5
10
15
20
25
30
Time(sec)
Sta
tes
x11
x11d
x12
x12d
Figure 1. The evolution of the states x1ðtÞ and the desired trajectory x1d ðtÞ:
Y.-J. PAN, H. J. MARQUEZ AND T. CHEN78
Copyright # 2007 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control 2008; 18:69–87
DOI: 10.1002/rnc

Generally, it may not be so straightforward to solve the HJI (18) for arbitrary nonlinearsystems [17]. As in [18], the nonlinear problem is simplified to a sequence of linear-quadratic andtime-varying approximating problems. Correspondingly, the method named ApproximatingSequence of Riccati Equations is applied to find the time-varying feedback controllers for theapproximated nonlinear systems. Hence, it is a sort of simplification for solving the nonlinearoptimal control problems. Specifically, for (18) in this paper, if we have further knowledge onthe g1 function as shown in Remark 2, then the inequality can be greatly simplified as well.
Remark 2In the nonlinear uncertain system (16), if g1ð#z1; tÞ can be expressed as F1ð#z1; tÞ#z1; where F1ð#z1; tÞ isa matrix-valued smooth function, then the HJ inequality in (18) can be simplified into thefollowing differential Riccati inequality:
1
2’Qþ
1
2ðQF1 þ FT
1 QÞ �QB1B
T1
r1�
1
4r21HHT
� �Qþ In�n40 ð31Þ
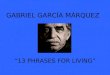
0 5 10 15 20
0
0.5
1
1.5
2
(a) Time(sec)
x 11 a
nd
de
sire
d x
11d
x11
x11d
0 5 10 15 20
0
0.2
0.4
(b) Time(sec)
Tra
ckin
g e
rro
r z 1
1
0 5 10 15 20
0
1
2
3
4
(c) Time(sec)
x 12 a
nd
de
sire
d x
12d
x12
x12d
0 5 10 15 20
0
0.5
1
(d) Time(sec)
Tra
ckin
g e
rro
r z 1
2
Figure 2. (a) x11ðtÞ and desired x11d ðtÞ; (b) tracking error z11ðtÞ ¼ x11ðtÞ � x11d ðtÞ; (c) x12ðtÞ anddesired #x12d ðtÞ; and (d) tracking error z12ðtÞ ¼ x12ðtÞ � x12d ðtÞ:
ROBUST TRACKING CONTROL FOR A CLASS OF MIMO NONLINEAR SYSTEMS 79
Copyright # 2007 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control 2008; 18:69–87
DOI: 10.1002/rnc

where Qð#z1; tÞ 2 Rn�n is a symmetric positive-definite smooth matrix. The z1 subsystem warrants
the tracking error norm, jjz1jj; to be bounded in Br (as defined in Theorem 2) by the nonlinearcontrol law
#xn
2 ¼ �1
r1BT1Q#z1 � f ð32Þ
which also specifies the switching surface as r ¼ #x2 � #xn2 :
In Remark 2, the solution V is treated as a linear quadratic form 12#zT1Q#z1: In (31), the matrixH is
dependent on B1ðtÞ matrix. Hence, for terms B1ðtÞTB1ðtÞ and HHT; the bound as denoted in (4) of
Assumption 1 can be applied to simplify the calculation of (31) for various specific examples.
0 1 2 3 4 5
0
0.5
1
1.5
2
(a) Time(sec)
x11 a
nd
estim
ate
d x
11
x11
estimated x11
0 1 2 3 4 5
0
5x 10
(b) Time(sec)
Estim
atio
n e
rro
r e
11
0 1 2 3 4 5
0
1
2
3
4
(c) Time(sec)
x12 a
nd
estim
ate
d x
12
x12
estimated x12
0 1 2 3 4 5
0
5x 10
(d) Time(sec)
Estim
atio
n e
rro
r e
12
Figure 3. (a) x11ðtÞ and estimated #x11ðtÞ; (b) estimation error e11ðtÞ ¼ x11ðtÞ � #x11ðtÞ; (c) x12ðtÞ andestimated #x12ðtÞ; and (d) estimation error e12ðtÞ ¼ x12ðtÞ � #x12ðtÞ:
Y.-J. PAN, H. J. MARQUEZ AND T. CHEN80
Copyright # 2007 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control 2008; 18:69–87
DOI: 10.1002/rnc

Remark 3Note that the value of r3 determines the bound of the tracking error and it depends on r2 and y:According to the expression of r3 as shown in the proof of Theorem 2, for a fixed r2; a larger yvalue in the observer design results a smaller tracking error bound r3:
Remark 4In the observer design, the parameter y is the only key parameter to be determined. It should bedesigned to satisfy the two conditions in (22) and y ¼ maxf1; c1g simultaneously. Note that thematrix H in (18) is related to the parameter y which is a constant, as a result the solution V from(18) or (31) is dependent on the value y as well as other parameters r1 and r1: However, thedesign of y is independent on the inequalities (18) and (31). It is difficult to get the generalapproach in how to achieve the solutions from (18) and (31). Future investigation for thegeneral case to get the smooth solution V will be studied.
0 10 20 30
0
2
4
6
8
(a) Time(sec)
x 21 a
nd e
stim
ate
d x
21
x21
estimated x21
0 10 20 30
0
1
2
(b) Time(sec)
Est
imatio
n e
rror
e 21
0 10 20 30
0
5
10
15
20
25
(c) Time(sec)
x 22 a
nd e
stim
ate
d x
22
x22
estimated x22
0 10 20 30
0
1
2
3
(d) Time(sec)
Est
imatio
n e
rror
e 22
Figure 4. (a) x21ðtÞ and estimated #x21ðtÞ; (b) estimation error e21ðtÞ ¼ x21ðtÞ � #x21ðtÞ; (c) x22ðtÞ andestimated #x22ðtÞ; and (d) estimation error e22ðtÞ ¼ x22ðtÞ � #x22ðtÞ:
ROBUST TRACKING CONTROL FOR A CLASS OF MIMO NONLINEAR SYSTEMS 81
Copyright # 2007 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control 2008; 18:69–87
DOI: 10.1002/rnc

Remark 5In the controller design, the discontinuous unit vector control law us in (28) may causechattering when the system enters the sliding mode in a finite time. In order to eliminate thechattering phenomenon which is harmful for the implementation in hardware, us can bemodified as
us ¼ �kdGTr
jjGTrjj þ eð33Þ
where e is a positive constant.
5. NUMERICAL EXAMPLE
Consider a nonlinear uncertain cascaded system
’x1 ¼ f1ðt;x1Þ þ B1ðtÞx2 þ G1ðt;x1Þw1
’x2 ¼ f2ðt;xÞ þ B2ðtÞ½uþ gðt;xÞ� þ G2ðt; xÞw2
ð34Þ
0 5 10 15 20 25 30
0
5
10
(a) Time(sec)
Co
ntr
ol u
1
0 5 10 15 20 25 30
0
50
(b) Time(sec)
Co
ntr
ol u
2
Figure 5. The evolution of the control profile uðtÞ: (a) u1ðtÞ and (b) u2ðtÞ:
Y.-J. PAN, H. J. MARQUEZ AND T. CHEN82
Copyright # 2007 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control 2008; 18:69–87
DOI: 10.1002/rnc

where
f1ðt; x1Þ ¼ F1 � x1 ¼0 1
�2 �4
" #x11
x12
" #; G1ðt; x1Þ ¼
cosðx12Þ sinðx12Þ
sinðx11Þ cosðx11Þ
" #
G2ðt;xÞ ¼sinðx11Þ cosðx12Þ
cosðx21Þ sinðx22Þ
" #; w1 ¼ ½sinð0:1tÞ;�sinð0:1tÞ�
T
f2ðt;xÞ ¼ ½x11 sinðx21Þ;x12 sinðx22Þ�T; w2 ¼ ½� sinð0:1tÞ; sinð0:1tÞ�T
B1ðtÞ ¼ ð1þ 0:5 sinðtÞÞI2; B2ðtÞ ¼ ð1þ 0:5 cosðtÞÞI2
gðt;xÞ ¼ ½sinðx11Þ þ sinðx12Þ;� cosðx21Þ � cosðx22Þ�T
The initial condition is as x1ð0Þ ¼ ½5; 5�T; x2ð0Þ ¼ ½3; 3�
T:
0 2 4 6 8 10 12 14 16 18 20
0
50
100
150
(a) Time(sec)
u 1
0 2 4 6 8 10 12 14 16 18 20
0
50
100
150
(b) Time(sec)
u 2
Figure 6. The evolution of the control profile uðtÞ: (a) u1ðtÞ and (b) u2ðtÞ:
ROBUST TRACKING CONTROL FOR A CLASS OF MIMO NONLINEAR SYSTEMS 83
Copyright # 2007 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control 2008; 18:69–87
DOI: 10.1002/rnc

The observer is designed as in (14). The transformation matrix TðtÞ; the matrices Dy; A; and %Care as
TðtÞ ¼I2 0
0 B1ðtÞ
" #; Dy ¼
I2 0
0I2
y
264
375; A ¼
0 I2
02 0
" #; %CT ¼
I2
02
" #
According to (24), we have the symmetric positive-definite solution
P ¼
1 0 �1 0
0 1 0 �1
�1 0 2 0
0 �1 0 2
0BBBBB@
1CCCCCA
y ¼ 80 is selected according to Remark 4 with lf ¼ 4:5622; lt ¼ 1; lg ¼ 1:0028; and r2 ¼ 1:The target trajectory is x11d ¼ 0:2 sinðptÞ and x12d ¼ ’x11d ¼ 0:2p cosðptÞ: The error dynamics
of the x1 subsystem in ð16Þ can be expressed as
’z1 ¼ F1z1 þ B1ðtÞ½x2 þ fðtÞ� þ G1w1
where fðtÞ ¼ ½0;� ’x12d � 2x11d � 4x12d �T: The g1 function in Assumption 4 is then a linear
function as g1ðz1; tÞ ¼ F1z1 where F1 is a stable matrix. In the #z1 subsystem, according to
0 0.5 1 1.5 2 2.5 3
0
1
(a) Time(sec)
σ 1
0 0.5 1 1.5 2 2.5 3
0
5
(b) Time(sec)
σ 2
Figure 7. The evolution of the switching surface rðtÞ: (a) s1ðtÞ and (b) s2ðtÞ:
Y.-J. PAN, H. J. MARQUEZ AND T. CHEN84
Copyright # 2007 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control 2008; 18:69–87
DOI: 10.1002/rnc

Remark 2, we first choose Vð#z1; tÞ ¼ 12#zT1Q#z1; where Q is determined by the differential Riccati
inequality (31). When ’Q ¼ 0; from the linear algebraic matrix inequality
1
2ðQF1 þ FT
1 QÞ �QB1B
T1
r1�
1
4r21HHT
� �Qþ I2�240 ð35Þ
and using the singular values of the matrices B1 andH ¼ fyTþðtÞD�1y P�1 %CTg%n�n %CD�1y ; which are0.5 and 160, respectively, we can get a symmetric positive-definite smooth matrix
Q ¼0:0106 0
0 0:0108
" #
r1 ¼ 0:9659; and r1 ¼ 0:001: Thus from (32), we have
#xn
2ðx1;x1d ; tÞ ¼ �ð1=r1ÞBT1Q#z1 � fðtÞ
The switching surface is r ¼ #x2 � #xn2 : Then the controller is constructed according to (26) in
Theorem 2.Simulation results are shown as follows. In Figure 1, u ¼ 0 is first applied. It is shown that the
tracking task cannot been realized without any controller and the system may be not stable. Hence,it is necessary to design an output feedback controller. In Figure 2, the tracking errors of the statesx11 and x12 are bounded with fast convergence. In Figures 3(a) and (b) and 4(a) and (b), theestimated states from the observer and the real states are compared. The estimation error convergesto a small bound as shown in Figures 3(c) and (d) and 4(c) and (d). The control profile is as shownin Figure 5. Compared with the control profile in Figure 6, we get a smoother control signal whichis easier to be implemented after introducing the smoothing strategy. Also the switching surfaceprofile is shown in Figure 7, in which we can see that it reaches zero in finite time.
6. CONCLUSIONS
We have considered the tracking control problem for a class of nonlinear systems with unknownsystem uncertainties and external disturbances, and proposed a robust output feedback controllaw based on a nonlinear observer that achieves input-to-state stability (ISS). The designprocedure is based on a back-stepping-like procedure. First a stable switching surface isallocated by solving a HJ inequality for the first subsystem. Then a discontinuous controller isconstructed to ensure the convergence of the Lyapunov function. As a result, the tracking erroris bounded.
APPENDIX
Proof of Theorem 1
Define eðtÞ ¼ wðtÞ � #wðtÞ and consider a transformation on the error as %e ¼ Dye: According to(10) and (11), the estimation error dynamics %e becomes
’%e ¼ yðA� P�1 %CT %CÞ%eþ DyT ½fðt;TþwÞ � fðt;Tþ #wÞ�
þ DyTGðt;TþwÞdðTþw; tÞ þ Dy ’TðtÞT
þD�1y %e
ROBUST TRACKING CONTROL FOR A CLASS OF MIMO NONLINEAR SYSTEMS 85
Copyright # 2007 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control 2008; 18:69–87
DOI: 10.1002/rnc

Construct a Lyapunov candidate as V0 ¼12 %e
TP%e; where P is the solution of (12). Then thederivative ’V0 becomes
’V0 ¼ � yV0 �y2%eT %CT %C%eþ %e
TPDyT ½fðt;TþwÞ � fðt;Tþ #wÞ�
þ %eTPDyTGðt;T
þwÞdðTþw; tÞ þ %eTPDy ’TðtÞT
þD�1y %e
4 � yV0 þ %eTPDyT ½fðt;T
þwÞ � fðt;Tþ #wÞ�
þ %eTPDyTGðt;T
þwÞdðTþw; tÞ þ %eTPDy ’TðtÞT
þD�1y %e ðA1Þ
For any y51; we have jjDyT ½fðt;TþwÞ � fðt;Tþ #wÞ�jj4lf jj%ejj; jjDy ’TTþD�1y jj4lt; jjDyTGjj4lg;and jjdðTþw; tÞjj4d; where lf ; lt; and lg do not depend on y:
Then (A1) can be
’V04� yV0 þ lmaxðPÞðlf þ ltÞjj%ejj2 þ lmaxðPÞlgjj%ejjjjdjj4� ðy� c1ÞV0 þ c2d
ffiffiffiffiffiffiV0
pðA2Þ
where
c1 ¼ 2lmaxðPÞ
lminðPÞðlf þ ltÞ
and
c2 ¼ lmaxðPÞlg
ffiffiffi2pffiffiffiffiffiffiffiffiffiffiffiffiffiffiffilminðPÞ
pIf y > maxf1; c1g is selected, then (A2) becomes
dffiffiffiffiffiffiV0
p
dt4�
y� c1
2
� � ffiffiffiffiffiffiV0
pþ
c2d2
)ffiffiffiffiffiffiffiffiffiffiffiV0ðtÞ
p4e�ððy�c1Þ=2Þt
ffiffiffiffiffiffiffiffiffiffiffiV0ð0Þ
pþ
c2dy� c1
½1� e�ððy�c1Þ=2Þt�
) jj%eðtÞjj4
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffilmaxðPÞ
lminðPÞ
se�ððy�c1Þ=2Þtjj%eð0Þjj þ
c2d
ðy� c1ÞffiffiffiffiffiffiffiffiffiffiffiffiffiffiffilminðPÞ
p ðA3Þ
Using jj%eðtÞjj4jjeðtÞjj4yjj%eðtÞjj; (A3) becomes
jjeðtÞjj4y
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffilmaxðPÞ
lminðPÞ
se�ððy�c1Þ=2Þtjjeð0Þjj þ
c2dy
ðy� c1ÞffiffiffiffiffiffiffiffiffiffiffiffiffiffiffilminðPÞ
p 4k0yjjeð0Þjj þ b0dd
where
k0y ¼ y
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffilmaxðPÞ
lminðPÞ
se�ððy�c1Þ=2Þt
and
b0d ¼c2y
ðy� c1ÞffiffiffiffiffiffiffiffiffiffiffiffiffiffiffilminðPÞ
p
Y.-J. PAN, H. J. MARQUEZ AND T. CHEN86
Copyright # 2007 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control 2008; 18:69–87
DOI: 10.1002/rnc

Hence, jjeðtÞjj ¼ jjwðtÞ � #wðtÞjj4k0yjjeð0Þjj þ b0d : Furthermore, from Assumption 1, jjTþjj4mþtand jjT jj4mt where mþt and mt are constants. According to wðtÞ ¼ TðtÞxðtÞ and #wðtÞ ¼ TðtÞ #xðtÞ;we have
jjexðtÞjj ¼ jjxðtÞ � #xðtÞjj ¼ jjTþeðtÞjj4mþt k0ymtjjexð0Þjj þ mþt b
0dd¼
4
kyjjexð0Þjj þ bdd
where ky ¼ mþt k0ymt and bd ¼ mþt b
0d :
REFERENCES
1. Jankovic M. Adaptive nonlinear output feedback tracking with a partial high-gain observer and backstepping. IEEETransactions on Automatic Control 1997; 42(1):106–113.
2. Tezcan IE, Basar T. Disturbance attenuating adaptive controllers for parametric strict feedback nonlinear systemswith output measurements. ASME Journal of Dynamic Systems, Measurement and Control 1999; 121(11):48–57.
3. Oh S, Khalil HK. Nonlinear output-feedback tracking using high-gain observer and variable structure control.Automatica 1997; 33(10):1845–1856.
4. Marino R, Tomei P. Nonlinear output feedback tracking with almost disturbance decoupling. IEEE Transactions onAutomatic Control 1999; 44(1):18–28.
5. Edwards C, Spurgeon SK, Patton RJ. Sliding mode observers for fault detection and isolation. Automatica 2000;36(4):541–553.
6. Farza M, Saad MM, Rossignol L. Observer design for a class of MIMO nonlinear systems. Automatica 2004;40:135–143.
7. Edwards C, Spurgeon SK. Sliding Mode Control: Theory and Applications, vol. 7. Taylor & Francis: London, 1998.8. Zinober ASI. Lecture Notes in Control and Information Sciences, Variable Structure and Lyapunov Control, vol. 64.
Springer: London, 1994.9. Young KD, Ozguner U. Sliding-mode design for robust linear optimal control. Automatica 1997; 33(7):1313–1323.10. Xu JX, Zhang J. On quasi-optimal variable structure control approaches. In Variable Structure Systems: Towards
the 21st Century, Yu XH, Xu JX (eds). Springer: Berlin, Germany, 2002; 175–200. ISBN: 3-540-42965-4.11. Utkin VI. Sliding Modes in Control and Optimization, vol. 34. Springer: Berlin, 1992.12. Xu JX, Pan YJ, Lee TH. A gain scheduled sliding mode control scheme using filtering techniques with applications
to multi-link robotic manipulators. Transactions of the ASME Journal, Dynamics System,Measurement, and Control2000; 122(4):641–649.
13. Khalil HK. Nonlinear Systems. Prentice-Hall: London, 1996.14. Sontag ED. Smooth stabilization implies coprime factorization. IEEE Transactions on Automatic Control 1989;
34:435–443.15. Marquez HJ. Nonlinear Control Systems: Analysis and Design. Wiley-Interscience: New York, 2003.16. Busawon KK, Saif M. A state observer for nonlinear systems. IEEE Transactions on Automatic Control 1999;
44(11):2098–2103.17. Banks SP, Mhana KJ. Optimal control and stabilization for nonlinear systems. IMA Journal of Mathematical
Control and Information 1992; 2(9):179–196.18. Cimen T, Banks SP. Nonlinear optimal tracking control with application to super-tankers for autopilot design.
Automatica 2004; 40:1845–1863.
ROBUST TRACKING CONTROL FOR A CLASS OF MIMO NONLINEAR SYSTEMS 87
Copyright # 2007 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control 2008; 18:69–87
DOI: 10.1002/rnc