Embed Size (px)
Citation preview

Hengfeng Li, Lars Kulik, Kotagiri Ramamohanarao Department of Computing and Information SystemsThe University of [email protected]
Robust Inferences of Travel Paths from GPS Trajectories
PROBLEM
METHOD
CASE STUDY
CONTRIBUTIONS
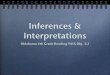
Problem: How to infer a travel path on the road network from a GPS trace under noisy conditions?
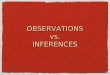
We propose a spatial-linear clustering algorithm to group noisy GPS points:
Proposing an efficient cluster-based mapping algorithm; Conducting extensive experiments on both synthetic and real data sets; Demonstrating a case study by applying resulting travel paths for traffic flow monitoring.
p1p2
p3
p4
p5p6
e1 e2
e3
e4
p1p2
p3
p4
p5p6
e1
e2
e3
e4
GPS Point
Road SegmentTravel Path (Ground Truth)Linear Cluster
p1p2
p3
p4
p5p6
e1 e2
e3
e4
p04
Projection Point
p03 p004
(a) A GPS trace (1Hz sampling rate)
(b) A possible solution (c) A better solution
Our Method:
(a) employ spatial-linear clustering to group GPS points; (b) derive and amalgamate sub-paths of point clusters.
Noisy PointAnchor Point
GPS Point
Road Segment
derrorR1
R2
p2
p3
p1
poutlier
R1
R2
p2
p1
p′
3
poutlier
(a) (b)An example to build groups of GPS points by increasing an oriented bounding rectangle with error-bounded distance.
Anchor PointRoad Segment
E1
E2
E3
RE4
E5
E6
E7
E8
E9
Major axis
E0
X
E0 E1
E2E3 E4
E5E6 E7
E8 E9
✓ ✓
✓X
An example of generating possible routes bounded by the spatial-linear cluster.
(a) (b)
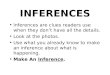
We conduct a case study to analyze the impact of map matching for the estimation of traffic flow of a large area.
(a) Travel distance and travel time (b) Actual overall traffic
(c) Ground truth (d) OBR-HMM (e) HMM
(f) Ground truth (g) OBR-HMM (h) HMM
(i) Ground truth (j) OBR-HMM (k) HMM
OBR-HMM: Our method HMM: Competing algorithm
RELATED PUBLICATIONSHengfeng Li, Lars Kulik, Kotagiri Ramamohanara: Robust Inferences of Travel Paths from GPS Trajectories. Submitted to International Journal of Geographical Information Science (under review). Hengfeng Li, Lars Kulik, Kotagiri Ramamohanara: Spatio-Temporal Trajectory Simplification for Inferring Travel Paths. In proceedings of the 22nd ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems (ACM SIGSPATIAL 2014), pages 63-72.
We derive travel paths for point clusters and combine them into a single complete path:
Poster theme adopted from TikZposter