Embed Size (px)
Citation preview

Robust Coordination in NetworksLaura Arditti, Giacomo Como, Member, IEEE, Fabio Fagnani, and Martina Vanelli, Member, IEEE
Abstract—We study the robustness of binary-action heteroge-neous network coordination games equipped with an externalfield modeling the different players’ biases towards one actionwith respect to the other one. We prove necessary and sufficientconditions for global stability of consensus equilibria under bestresponse type dynamics, robustly with respect to (constant ortime-varying) values of the external field. We then apply theseresults to the analysis of mixed network coordination and anti-coordination games and find sufficient conditions for existenceand global stability of pure strategy Nash equilibria. Our resultsapply to general weighted directed interaction networks andbuild on super-modularity properties of the coordination gamesin order to characterize conditions for the existence of a novelnotion of robust improvement and best response paths.
Index terms: Coordination games, network games, networkrobustness, best response dynamics, robust stability.
I. INTRODUCTION
Robustness, meant as the ability of the system to performeffectively under a range of operating conditions absorbingpossible disruptions, is undoubtedly a fundamental issue thathas long been studied in control [2]. While playing a keyrole in several domains, robustness and the related notion ofresilience have lately become central in multi-agent and net-work systems, such as infrastructure systems [3]–[6], financialnetworks [7]–[10], as well as social and economic networks[11]–[14]. In fact, the interconnectivity level of such criticalsocietal systems has dramatically increased over the last years,due to the unprecedented technological advancements in termsof real-time sensing, communication, and decision capabilities.As a consequence, such large scale networks tend to be proneto disruptions as localized perturbations have the potential tobuild up through cascading mechanisms, possibly achievingdetrimental systemic effects. A characteristic feature that hasbeen recognized in the robustness analysis of network systemsis the role played by their interconnection pattern topology inpropagating or attenuating shocks. [15]–[19].
The increasing interest in game-theoretic models for multi-agent and network systems makes it relevant and timely toaddress the robustness issues above in the framework ofnetwork games [20]–[24]. These are strategic games whoseplayers are identified with the nodes of a graph and have
Some of the results in the paper appeared in preliminary form in [1].The authors are with the Department of Mathematical Sciences
“G.L. Lagrange,” Politecnico di Torino, 10129 Torino, Italy (e-mail:{laura.arditti; giacomo.como; fabio.fagnani; martina.vanelli}@polito.it). G.Como is also with the Department of Automatic Control, Lund University,22100 Lund, Sweden.
This research was carried on within the framework of the MIUR-fundedProgetto di Eccellenza of the Dipartimento di Scienze Matematiche G.L. La-grange, Politecnico di Torino, CUP: E11G18000350001. It received partialsupport from the MIUR Research Project PRIN 2017 “Advanced NetworkControl of Future Smart Grids” (http://vectors.dieti.unina.it), and by theCompagnia di San Paolo through the Project “SMaILE”.
utilities that depend on their own and their neighbors’ actions.Typically, network games are formulated as closed systems,without explicit input or output signals. External influenceis usually modeled as the modification of certain parametersappearing in the utility functions and a common problemaddressed is the way such interventions can modify the Nashequilibria or their nature. This viewpoint is natural for instancein analyzing the effect of taxes or subsidies in economicmodels or prices and tolls in transportation systems [25], [26].More recently, a similar approach has been proposed in thecontext of network quadratic games [27] to model incentiveinterventions. The effect of node removal in such quadraticgames has also been investigated [28].
In this paper, we study network coordination games withbinary action sets, intrinsically equipped with interconnectionports modeling possible interactions with the external envi-ronment. We first introduce a number of robustness notionsfor such games and characterize them in terms of topologicalproperties of the network structure. We then apply these resultsto the analysis of network coordination dynamics embedded ina time-varying environment as well as to the study of networkcoordination games interconnected with different games.
Network coordination games represent one of the mostpopular models to describe network systems with interactionsof strategic complements type [29], [30]. They find numerousapplications in modeling social and economic behaviors likethe emergence of social norms and conventions or the adoptionof new technologies [31]–[35]. A growing literature studiesvarious types of learning dynamics for such games [36]–[39],also as a model for contagion and cascades in networks [40]–[44]. Optimal seeding and other intervention problems fornetwork coordination games have been studied in [45] and,in the more general setting of super-modular games, in [46].Recently, vulnerability of network coordination games againstadversarial attacks has been investigated in [47], [48], while[49] uses network coordination games as a micro-foundationfor community structure in networks.
Network coordination games are a special case of super-modular games, as they satisfy the so-called increasing dif-ference property [50], [51]. Specifically, the convenience fora player to switch from an action to the alternative action ismonotone in the fraction of players in her neighborhood al-ready playing the alternative action. Such monotonicity reflectsin a threshold structure of the best response: an action becomesconvenient over the alternative action for a player when asufficient fraction of her neighbor players have chosen thataction. Consensus configurations (whereby all players playingthe same action) are the prototypical outcome of such games.Consequently, much of the interest is in understanding whichare the conditions under which a distributed learning rule leadsto such configurations or, conversely, which are the possible
arX
iv:2
109.
1268
5v2
[cs
.GT
] 1
1 O
ct 2
021

2
obstacles that could prevent it. In [31], for the special casewhen the threshold of all nodes are equal, the existence ofnon-consensus Nash equilibria (to be referred to as coexistentequilibria) is studied in terms of an equivalent network topol-ogy property known as cohesiveness. In the absence of suchcoexistent equilibria, classical results of super-modular gamesshow that under best response dynamics the system alwaysconverges in finite time to a consensus equilibrium.
The distinctive feature of this paper is to analyze static anddynamic properties of network coordination games on generaldirected graphs, parameterized by an external field that affectsthe utility functions. Our focus is on the structure and stabilityof Nash equilibria, particularly the consensus configurations,and on the asymptotic behavior of best response type learningdynamics. The external field can model either endogenousheterogeneity in the network, or an exogenous signal, to beinterpreted as a perturbation or a control variable. A variationof the external field modifies the threshold of a player, inextreme cases transforming her into a stubborn agent, i.e., onewhose best response is always the same action, regardless ofher fellow players’ actions.
In particular, we study conditions under which the systemconverges to a consensus equilibrium, independently from thevalues taken by the external field. As it turns out, two con-ditions need to be satisfied for such robust stability propertyto hold true. The first condition, to be referred to as robustindecomposibility, is a generalization of the lack of cohesivepartitions [31] to parametrized families of heterogeneous net-work coordination games. It is equivalent (see Theorem 1) tothe lack of coexistent equilibria for any value of the externalfield within a certain range. On the other hand, the secondcondition guarantees that the external field is incapable ofcreating stubborn agents for both actions. While the necessityof these two conditions for convergence to a consensus is quiteintuitive, the proof of sufficiency is more involved and resideson the possibility to find best response paths for the gamethat are robust to modifications of the external field. This isachieved in Theorem 2 that is one of our main results and usesin a crucial way the super-modularity of the game. The finalconvergence result is then presented in Theorem 3.
Finally, we apply the theory illustrated above to the anal-ysis of network games where a subset of the nodes play acoordination game, while the rest of the nodes play an anti-coordination game [52], i.e., a game where the conveniencefor a player to switch from an action to the alternative action isanti-monotone in the fraction of players in her neighborhoodalready playing such alternative action. Such mixed networkgames have received attention in the recent literature: see,e.g., [53], where it is proven that the asynchronous best-response dynamics of pure coordination games and pure anti-coordination games will almost surely converge to Nash equi-libria for every network topology and every set of thresholds;[54], studying the more general setting of network gameswith the simultaneous presence of strategic complements andsubstitutes interactions; and [55] where a detailed analysis ofthe behavior of mixed network coordination/anti-coordinationgames is presented for the special case when the underlyinggraph is complete. For this class of mixed network games,
in Theorem 4 and Corollary 3 we provide sufficient condi-tions guaranteeing convergence to a Nash equilibrium whoserestriction to the set of coordinating players is a consensus.
The rest of the paper is organized as follows. SectionI is concluded by introducing some notational conventions.Section II is dedicated to recall basic facts on games and,particularly, to gather a number of fundamental results onbinary super-modular games. These results are not necessarilyoriginal if not for the way they are presented here, which isfunctional to their use in the rest of the paper. Nevertheless, wepresent proofs of many of these results as we were not able tofind them in the literature. Section III is devoted to the analysisof binary network coordination games with the external fieldconsidered fixed. We propose a new classification of suchgames on the basis of the structure of their Nash equilibria,dependently on how many consensus Nash equilibria theypossess and the possible existence of coexistent equilibria.We generalize the concept of cohesiveness and we proposea general topological property equivalent to the absence ofcoexistent Nash equilibria in Propositions 5 and 6. We alsorecall some stability results of consensus equilibria. In SectionIV, we propose a robust version of the properties studied inSection III assuming the external field to take values in somebounded domain. Main result of this section is Theorem 2 thatcontains a robust stability analysis of consensus equilibria andis instrumental to the applications studied in the next sections.Sections V and Section VI contain the two main applicationsconsidered in this paper, both dealing with the asymptoticbehavior of the asynchronous best response dynamics fornetwork coordination games. In particular, in Section V weconsider time-varying perturbations of the external field andfind necessary and sufficient conditions for convergence toa consensus. In Section VI, we analyze a system that isa mixture of coordinating and anti-coordinating agents andwe find an original sufficient condition that guarantees thatthe coordinating agents will asymptotically reach a consensusequilibrium. Section VII closes the paper discussing somedirections for future research.
We conclude this section by introducing some notationalconventions to be followed throughout the paper. We will oftenconsider real vector spaces of type RI for some finite set I,equipped with the component-wise partial order ≤, formallydefined by
x ≤ y ⇔ xi ≤ yi, ∀i ∈ I . (1)
For two vectors x and y in RI , the component-wise supremumx∨y in RI and infimum x∧y in RI have entries, respectively,
(x∨ y)i = max{xi, yi}, (x∧ y)i = min{xi, yi} , ∀i ∈ I .
We use the notation ∨L and ∧L to indicate the component-wise supremum and infimum, respectively, of a subset L ⊆RI . A function f : RI → RJ is referred to as monotone non-decreasing (nonincreasing) if it preserves (reverses) the partialorder ≤ defined in (1), i.e., if f(x) ≤ f(y) (f(x) ≥ f(y)) forevery x ≤ y. For a vector x in RI , |x| in RI stands for thevector with entries (|x|)i = |xi| for every i in I. The symbol1 indicates a vector with all components equal to 1.

3
II. PRELIMINARIES
In this section, we first provide some background on gametheory. Then, we introduce the classes of super-modular gamesalong with some of their most relevant properties.
A. Game-theoretic notions
We consider strategic form games with a finite nonemptyplayer set V and binary action set A = {±1} for every playeri in V . We denote by X = AV the space of strategy profilesor configurations. The i-th entry xi of a configuration x inX represents the action played by player i in V . We referto x = ±1 as a consensus configuration, and to every x inX \{±1} as a co-existent configuration. We use the notation
V+x = {i ∈ V : xi = +1} , V−x = {i ∈ V : xi = −1}
to indicate the sets of players that, in the configuration x,are playing, respectively, +1 and −1. With a slight abuse ofnotation, we adopt the convention of identifying the symbols+ and − with the actions +1 and −1, respectively, so that,e.g., we may write Vs
x = {i ∈ V : xi = s} for s = ±1.Every player i in V represents a rational agent whose aim
is to maximize a utility function ui : X → R . As customary,for a strategy profile x in X and a player i in V , we let x−iin X−i = AV\{i} stand for the strategy profile of all playersexcept for player i. We shall then use the slight and commonabuse of notation
ui(x) = ui(xi, x−i)
for the utility perceived by player i in configuration x. Thebest response correspondence for a player i in V is then
Bi(x−i) = argmaxxi∈A
ui(xi, x−i) .
For later use, we also define
B+i (x−i) = maxBi(x−i), B−i (x−i) = minBi(x−i) .
An action a in A is dominant for a player i if
a ∈ Bi(x−i) , ∀x−i ∈ X−i ,
and strictly dominant if
Bi(x−i) = {a} , ∀x−i ∈ X−i .
A player i having a strictly dominant action a is referred toas an a-stubborn agent.
A (pure strategy Nash) equilibrium is a configuration x∗ inX such that
x∗i ∈ Bi(x∗−i) , ∀i ∈ V .
The set of equilibria of a game will be denoted as N . Anequilibrium x∗ is referred to as strict if
Bi(x∗−i) = {x∗i } , ∀i ∈ V .
We shall consider learning dynamics in games based onrevision protocols whereby only one player modifies her actionat a time and such modification never decreases the player’sutility. A number of related concepts are reported below. We
start with describing the type of paths that the configurationvector can follow under such revision protocols.
Definition 1. For l ≥ 0, a length-l admissible path from x inX to y in X is an (l + 1)-tuple of strategy profiles
(x(0), x(1), . . . x(l)) ∈ X l+1 (2)
such thatx(0) = x , x(l) = y , (3)
and for k = 1, 2, . . . , l, there exists a player ik in V such that
x(k)−ik = x
(k−1)−ik , xkik 6= x
(k−1)ik
. (4)
A length-l admissible path (2) is referred to as• monotone if x(0) � x(1) � · · · � x(l);• anti-monotone if x(0) x(1) · · · x(l).
In other words, a length-l admissible path is an (l+1)-tupleof strategy profiles such that two consecutive strategy profilesdiffer just for the action of a single player ik, to be referredto as the k-th active player. Notice that an admissible pathfrom a configuration x to another configuration y is completelydetermined by the sequence of active players (i1, i2, . . . , il).In monotone paths, players can modify their action from −1to +1 only, conversely only modification from +1 to −1 areallowed in anti-monotone paths.
Definition 2. A length-l admissible path (x(0), x(1), . . . x(l))with sequence of active players (i1, i2, . . . , il) is• an improvement path (I-path) if
uik(x(k)) > uik(x(k−1)) , k = 1, 2, . . . , l ; (5)
• a best response path (BR-path) if
uik(x(k)) ≥ uik(x(k−1)) , k = 1, 2, . . . , l . (6)
Notice that, by convention, every I-path is also a BR-path (but not vice versa) and that the singleton (x) is tobe considered as a length-0 I-path from x to x with anempty sequence of active players. Observe that, since we areassuming a binary action set, relation (5) is equivalent to
Bik(x(k−1)−ik
)={x(k)ik
}while, whenever relation (6) is satisfied with equality, it meansthat
Bik(x(k−1)−ik
)={x(k)ik, x
(k−1)ik
}.
Definition 3. For α ∈ {I,BR}, a subset of strategy profilesY ⊆ X is:• α-reachable from strategy x in X if there exists an α-path
from x to some strategy profile y in Y;• globally α-reachable if it is α-reachable from every
configuration x in X ;• α-invariant if there are no α-paths from any y in Y to
any z in X \ Y .• globally α-stable if it is globally α-reachable and α-
invariant.
To indicate that a configuration y is I-reachable (BR-reachable) from a configuration x, we will use the notation

4
x→ y (x ⇀ y). If y is reachable from x by an monotone oranti-monotone I-path (BR-path), we will use the notation
x ↑ y, x ↓ y, x � y, x � y ,
respectively. Observe that all these relations are reflexive andtransitive.
B. Super-modular games
Super-modular games are an important class of games andhave received a considerable amount of attention in the liter-ature [29], [30], [50], [51]. Below we recall the definition ofsuper-modular games and report a number of their fundamentalproperties. We take advantage of the binary action settingconsidered here, while at the same time we recall that thetheory of super-modular games can be developed in moregeneral lattice action sets.
Definition 4. A binary action game is super-modular if forevery player i ∈ V ,
ui(1, x−i)− ui(−1, x−i) ≥ ui(1, y−i)− ui(−1, y−i) , (7)
whenever x−i ≥ y−i.
In other words, a game is super-modular if the marginalutility ui(1, x−i)−ui(−1, x−i) of every player i is a monotonenondecreasing function of the strategy profile x−i of theother players. This is sometimes referred to as the increasingdifference property.
It will prove useful to introduce the four maps
f+, f−, g+, g− : X → X (8)
on the configuration space, respectively defined by
f+(x) =∨{y ∈ X |x ↑ y} , f−(x) =
∧{y ∈ X |x ↓ y} ,
g+(x) =∨{y ∈ X |x � y} , g−(x) =
∧{y ∈ X |x � y} ,
for every x in X . Thanks to Lemma 3 in Appendix A, wehave that f+(x) and g+(x) (f−(x) and g−(x)) representthe maximal (minimal) configurations that are BR-reachableand, respectively, I-reachable from x by a monotone (anti-monotone) path. Notice that all sets in the righthand side ofthe above are nonempty as they contain the strategy profile x.
In the following statement, we gather a number of propertiesrelating equilibria of super-modular games with the behaviorof the maps (8) that will be used in the rest of the paper.
Proposition 1. Consider a finite super-modular game withbinary action sets. Then, for every configuration x in X ,
(i) f−(f+(x)) ∈ N and f+(f−(x)) ∈ N are, respectively,the greatest and least equilibria I-reachable from x;
(ii) f−(g+(x)) ∈ N and f+(g−(x)) ∈ N are, respectively,the greatest and least equilibria BR-reachable from x;
(iii) if x ∈ N , then g+(x), g−(x) ∈ N are, respectively, thegreatest and least equilibria BR-reachable from x.
Moreover,
(iv) the set of equilibria N is a non empty complete latticeand is globally I-stable;
(v) the two configurations
x∗ = f+(g−(−1)) = f+(−1) ,
x∗ = f−(g+(+1)) = f−(+1) ,(9)
are, respectively, the least and greatest equilibria;(vi) for two equilibria x and y in N , f+(x∨y) and f−(x∧y)
are, respectively, the least and the greatest equilibria thatare, respectively, above and below both x and y;
(vii) if x∗ = x∗ = x∗, then N = {x∗} is globally BR-stable.
Remark 1. In general the set of equilibria N is not BR-invariant for a super-modular game: e.g., a 2-player gamewith utilities u1(x1, x2) = x1x2 and u2(x1, x2) = 0 for x1and x2 in {±1} is super-modular but its equilibrium set N ={±1} is not BR-invariant since B2(+1) = B2(−1) = {±1}.
In order to ensure both readability and completeness, a proofof Proposition 1 is provided in Appendix A, along with anumber of other properties of super-modular games that areoften scattered around in the aforementioned literature andmay prove relatively difficult to be found exactly in the formused in this paper.
In the rest of this paper, we shall often consider gamesdepending on some vector parameter h in RV whose entrieshi are to be interpreted as endogenous or exogenous signalsmodifying the payoff of player i. Whenever needed, we shallmake the dependance on the parameter h explicit by writing,e.g., ui(xi, x−i, h), Bi(x−i, h), Nh, or f±(x, h). Particularlyinteresting for us will be the case when super-modularityis guaranteed also with respect to the parameter h. This iscaptured by the following.
Definition 5. A binary action game with utilities ui(x, h) thatdepend on a parameter h in I (where I is a lattice) is referredto as a super-modular family if the game is super-modular forevery h in I, and
ui(1, x−i, h)−ui(−1, x−i, h) ≥ ui(1, x−i, h′)−ui(−1, x−i, h′) ,
(10)for every two parameters h ≥ h′ in I, every player i in V ,and every configuration x in X .
In other words a parameter-dependant super-modular gameis a super-modular family if it satisfies the additional increas-ing difference property (10) requiring that the marginal utilityof every player in every configuration be a monotone nonde-creasing function of the parameter. The following propositiongathers a number of key properties that are consequence ofthe additional increasing difference property (10) and can beproven along the same arguments used before.
Proposition 2. Consider a binary super-modular family ofgames with set of players V and utility functions ui(x, h)depending on the parameter h and assume that (10) holdstrue. Then, for every configuration x in X ,
(i) B+i (x−i, h) and B−i (x−i, h) are monotone nondecreasingfunctions of h;
(ii) the maps f+(x, h), f−(x, h), g+(x, h), g−(x, h) aremonotone nondecreasing functions of h.

5
III. NETWORK COORDINATION GAMES
In this section, we first introduce the class of networkcoordination games and present some of their most relevantproperties. Then, we move on by introducing a classificationof network coordination games based on the structure of theirequilibrium set. Specifically, the proposed classification de-pends on two qualitatively relevant properties: the cardinalityof the set of consensus equilibria and the possible presence ofco-existent equilibria. We then prove necessary and sufficientconditions for such classification in terms of graph-theoreticproperties of the network.
We consider directed weighted graphs G = (V, E ,W ) withfinite set of nodes V , set of directed links E ⊆ V×V , and non-negative weight matrix W in RV×V+ such that Wij > 0 if andonly if (i, j) is a link in E . We do not allow for the presence ofself-loops, i.e., we assume that the weight matrix W has zerodiagonal. Throughout, finite directed weighted graphs withoutself-loops will be simply referred to as graphs. We recoverundirected graphs as a special case when the weight matrixW = W ′ is symmetric, so that in particular (j, i) is a link inE whenever (i, j) is. For a graph G = (V, E ,W ) and a subsetof nodes S ⊆ V , we denote by
wSi =∑j∈S
Wij ,
the S-restricted out-degree of a node i in V . In the special casewhen S = V coincides with the whole node set, we simplyrefer to
wi = wVi
as the out-degree of a node i in V and let w = W1 be thevector of out-degrees.
Definition 6. The network coordination game on a graph G =(V, E ,W ) with external field h in RV is the game with playerset V , whereby every player i in V has binary action set A ={±1} and utility function
ui(x) = xi∑j∈V
Wijxj + hixi . (11)
Notice that it immediately follows from the computation
ui(1, x−i)− ui(−1, x−i) = 2∑j∈V
Wijxj + 2hi ,
and the assumption Wij ≥ 0 for all i, j in V , that a networkcoordination game is a super-modular family, so that theresults of Section II-B do apply to it. In fact, there are somespecificities regarding network coordination games that it isworth discussing in some detail.
In a network coordination game, players are to be identifiedwith the nodes of a graph G, and the utility of a player dependsonly on her own action and on the actions of those playersidentified with her out-neighbors in G. Specifically, player i’sutility function may be rewritten as
ui(x) = xi(hi + w+
i (x)− w−i (x)), (12)
wherew+
i (x) = wV+
xi , w−i (x) = w
V−x
i .
Equation (12) highlights the decomposition of the utility of aplayer i in V as the sum of a term hixi that depends only onher own action and rewards its alignment with the correspond-ing entry of the external field, plus a term xi(w
+i (x)−w−i (x))
that is the difference between the aggregate weight of linkspointing to out-neighbors with the same action and the ag-gregate weight of links pointing to out-neighbors with theopposite action.
The following statement gathers a few specific simpleresults for coordination games.
Proposition 3. Consider the network coordination game on agraph G = (V, E ,W ) with external field h in RV . Then,
(i) for every strategy profile x in X and every player i in V ,
xi ∈ Bi(x−i) ⇐⇒ ui(x) ≥ 0 ; (13)
(ii) the best response correspondence has the threshold form
Bi(x−i) =
{+1} if w+
i (x) > riwi
{±1} if w+i (x) = riwi
{−1} if w+i (x) < riwi ,
(14)
for every i in V , where
ri =1
2− hi
2wi, (15)
is the threshold of player i;(iii) action a = ±1 is a strictly dominant strategy for a player
i in V if and only if ahi > wi;
Proof: (i) This follows directly from the equivalent form(12) of the utility function.
(ii) By substituting the identity wi = w+i (x) + w−i (x) into
(12), we have that
ui(x) = xi(hi + 2w+
i (x)− wi
),
from which (14) follows directly.(iii) This follows directly from point (ii).
To emphasize the dependance on the external field h, weshall use the notation Nh for the set of equilibria of thenetwork coordination game with external field h, and let
N •h = Nh ∩ {±1} , N ◦h = Nh \ {±1} ,
be the subsets of consensus and, respectively, co-existentequilibria. We then introduce the following notion.
Definition 7. A network coordination game on a graph G withexternal field h is• regular if |N •h | = 2;• biased if |N •h | = 1; more precisely, for a = ±1, the
network coordination game is a-biased if N •h = {a};• frustrated if |N •h | = 0.
Notice that, in a frustrated network coordination game,neither of the consensus configurations is an equilibrium. Sincenetwork coordination games are super-modular, by Proposition1, the set of equilibria Nh is never empty, hence a frustrated

6
network coordination game always admits at least one co-existent equilibrium. In contrast, when the game is not frus-trated (either regular or biased) at least a consensus configura-tion is an equilibrium. Besides consensus, there might or mightnot exist co-existent equilibria. To distinguish these cases, thefollowing further classification proves useful.
Definition 8. A network coordination game on a graph G withexternal field h is• unpolarizable if N ◦h = ∅;• polarizable if N ◦h 6= ∅.
The set of equilibria of an unpolarizable regular networkcoordination game contains both consensus configurations ±1and no other configurations, whereas unpolarizable biasednetwork coordination games admit a single (consensus) equi-librium: x∗ = +1 in the positively biased case and x∗ = −1in the negatively biased one. On the other hand, polarizablenetwork coordination games have always co-existent equilibriaplus possibly consensus ones (if they are regular or biased).In the sequel, we shall identify necessary and sufficient con-ditions for a network coordination game to be regular, biased,or frustrated, and for it to be polarizable or unpolarizable.
We start introducing two sets that will play a key role inour analysis:
Sa(h) = {i ∈ V | ahi − wi > 0} , a = ±1 . (16)
By Proposition 3 (iii), Sa(h) coincides with the set of playersfor which a is a strictly dominant action, i.e., the set ofa-stubborn agents. The following simple result relates thepresence of a-stubborn players with that of the consensusequilibrium −a1.
Lemma 1. Consider a network coordination game on a graphG = (V, E ,W ) with external field h and let x∗(h) and x∗(h)be its least and greatest equilibria, respectively. Then,
(i) x∗(h) = −1 ⇔ S+1(h) = ∅ ⇔ h ≤ w(ii) x∗(h) = +1 ⇔ S−1(h) = ∅ ⇔ h ≥ −w
Proof: If x∗(h) = −1, then there cannot be +1-stubbornplayers, i.e., S+1(h) = ∅, so that h ≤ w. On the other hand,if h ≤ w, then, using the threshold form of the best responsein Proposition 3 (ii), we deduce that −1 is an equilibrium,namely x∗(h) = −1. This proves (i), while (ii) can be provenanalogously.
In fact, Lemma 1 directly implies the following result.
Proposition 4. Let G be a graph with out-degree vector w.Then, the network coordination game on G with external fieldh is
(i) regular if and only if
|h| ≤ w ; (17)
(ii) a-biased for a = ±1 if and only if
w ≥ −ah , w � ah ; (18)
(iii) frustrated if and only if
w � −h , w � h . (19)
Remark 2. The necessary and sufficient conditions in Propo-sition 4 can be readily interpreted in terms of the presence ofstubborn agents, as introduced in Section II. In fact, Lemma1 implies that (17) is equivalent to the fact that no player isstubborn, (18) is equivalent to the existence of at least one a-stubborn agent but no −a-stubborn agents, and (19) is equiv-alent to the existence of both +1- and −1-stubborn agents.Hence, Proposition 4 states that a network coordination gameis regular if and only if there are no stubborn agents, biasedif and only if it contains stubborn agents of one type only, andfrustrated if it contains stubborn agents of both types.
In contrast to the relative simplicity of the characterizationabove, necessary and sufficient conditions for polarizability ofnetwork coordination games as per Definition 8 are in generalmore involved. First, we introduce the following notion.
Definition 9. A graph G = (V, E ,W ) is h-indecomposablefor a vector h in RV if for every nontrivial binary partitionof the node set
V = V+∪V− , V−∩V+ = ∅ , V+ 6= ∅ , V− 6= ∅ , (20)
there exist s in {±1} and a node i in Vs such that
wsi + shi < w−si , (21)
where wsi = wV
s
i .
We have the following result.
Proposition 5. The network coordination game on a graphG with external field h is unpolarizable if and only if G ish-indecomposable.
Proof: We start with a general consideration. Given anyconfiguration x∗ in X , for any player i such that x∗i = s, from(12) we can write that
ui(x∗) = s(hi + w+
i (x∗)− w−i (x∗))= s(hi + sws
i (x∗)− sw−si (x∗))= shi + ws
i (x∗)− w−si (x∗) .(22)
We now argue as follows. If the network coordination gameon G with external field h is polarizable, there exists anequilibrium x∗ 6= ±1. From (22) and Proposition 3 (i) wederive that, for every s and i such that x∗i = s,
shi + wsi (x∗)− w−si (x∗) ≥ 0 .
This implies that relatively to the the nontrivial binary partitionV = V+
x∗ ∪V−x∗ , (21) does not hold true for any s in {±} andi in Vs
x∗ Hence, G is not h-indecomposable.On the other hand, if G is not h-indecomposable, then there
exists a nontrivial binary partition V = V+∪V− such that forevery s in {±} and i in Vs,
wsi + shi ≥ w−si , (23)
where wsi = wV
s
i . Let x∗ in X be the configuration withentries x∗i = s for every i in Vs. Then, (22) and (23) implythat
ui(x∗) = shi + ws
i (x∗)− w−si (x∗) ≥ 0 ,
for every i in Vs. Proposition 3 (i) implies that x∗ is anequilibrium for the network coordination game with external

7
h1
h2
w1-w1
w2
-w2
fr.
fr.
+1-biased
−1-biased
regularh1
h2
w1-w1
w2
-w2
pol.
pol.
unpolarizable
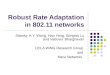
Fig. 1: Classification of two-player network coordinationgames as in Example 1, based on Proposition 4 and 5.
field h. This equilibrium is necessarily co-existent since V−and V+ are both nonempty.
Remark 3. Given a graph G = (V, E ,W ) and r in [0, 1], asubset of nodes S ⊆ V is called r-cohesive [31] if
wSi ≥ rwi , ∀i ∈ S , (24)
and r-closed if its complement V\S is (1−r)-cohesive. Noticethat, using the identity wi = ws
i +w−si , condition (21) can berewritten as 2ws
i < wi−shi . In the special case when playershave homogeneous thresholds ri = r in [0, 1], equivalentlywhen the external field is proportional to the node degreevector, i.e., h = (1 − 2r)w, (21) is equivalent to ws
i < rwi.Hence, in this special case, h-indecomposability of a graph Gis equivalent to the non-existence of nonempty proper subsetsof nodes S that are both r-cohesive and r-closed. In this sense,Proposition 5 generalizes [56, Proposition 9.7] to networkcoordination games with heterogeneous thresholds.
In the following examples, we shall illustrate how Proposi-tions 4 and 5 can be applied to classify the behavior of networkcoordination games on some simple graph structures.
Example 1. Let G = (V, E ,W ) be a graph with twonodes V = {1, 2} connected by two directed links of weightW12 = w1 and W21 = w2, respectively. Consider a networkcoordination game on G with external field h = (h1, h2).
As illustrated in Figure 1, by Proposition 4, the networkcoordination game is: regular if |h| ≤ w (white region); +1-biased if h ≥ −w and h � w (\-shaded region); −1-biased ifh ≤ w and h � −w (/-shaded region); frustrated if h1 > w1
and h2 < −w2 or h1 < −w1 and h2 > w2 (dotted region).On the other hand, Proposition 5 ensures that the network
coordination game on G is unpolarizable if and only if oneof the following holds true: (i) h < w, (ii) h > −w, (iii)|h1| < w1, (iv) |h2| < w2, as illustrated in Figure 1. Noticethat, for the special case of only two-players, the networkcoordination game is polarizable if and only if it is frustrated.
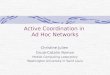
Example 2. Consider the network coordination game on acomplete graph G = (V, E ,W ) with n = |V| nodes and weightmatrix W = 11′ − I , as in Figure 2.
First, consider the network coordination game on G withexternal field h = 1. Consider any binary partition V = V−∪V+ such that |V−| = m for 1 ≤ m < n. If m < n/2, then,(21) reduces to m = w+
i + hi < w−i = n − m for every iin V+, hence it is satisfied. On the other hand, if m ≥ n/2,then (21) reduces to n − m − 2 = w−i − hi < w+
i = mfor every i in V−, which is also satisfied. This shows that G
1
2
3
5
6
4
7
Fig. 2: As explained in Example 2, on a complete graph withn = 7 nodes the network coordination game with externalfield h = 1 is unpolarizable, while the one with external fieldh = (1, 1, 1,−1,−1,−1,−1) is polarizable.
is 1-indecomposable, so that, by Proposition 5, the networkcoordination game is unpolarizable.
Now, consider an external field h such that hi = 1 for1 ≤ i ≤ bn/2c and hi = −1 for bn/2c < i ≤ n. Then, G ish-indecomposable if and only if n is odd. In fact, for even n,the binary partition V = V− ∪ V+ with V+ = {1, . . . , n/2}and V− = {n/2 + 1, n}, is such that (21) is violated by everyi in V . Then, by Proposition 5, the network coordination gameis unpolarizable for odd n and polarizable for even n.
Biased unpolarizable coordination games can be character-ized in an equivalent simpler form.
Proposition 6. The network coordination game on a graph Gwith external field h is a-biased and unpolarizable if and onlyif the following conditions are both satisfied:
(a) w � ah;(b) every non-empty subset R ⊆ V \ Sa(h) contains some
node i such that
wRi < wV\Ri + ahi . (25)
Proof: (Only if) Assume that the network coordinationgame is is a-biased and unpolarizable. Then, condition (a)follows from Proposition 4 (ii). To prove (b), assume by con-tradiction that there exists a non-empty subset R ⊆ V \Sa(h)such that
wRi ≥ wV\Ri + ahi , (26)
for every i in R and let x in X be a configuration such thatxi = a for every i in V \ R and xi = −a for every i in R.Notice that (26) and (22) imply that ui(x) ≥ 0, so that, byProposition 3 (i), −a = xi ∈ Bi(x−i), for every i inR = V−ax .If a = +1 (a = −1), this implies that there are no monotone(anti-monotone) I-paths of positive length starting at x, so thatin particular fa(x) = x. Then, by Proposition 1 (i), we getthat
x∗ = f−a(x) = f−a(fa(x))
is an equilibrium. Notice that on the one hand x∗i = −a forevery i in R (since xi = −a and x∗ = f−a(x)), on theother hand x∗i = a for every i in Sa(h) (since those arestubborn players). Hence, x∗ is a co-existent equilibrium, thuscontradicting the assumption that the game is unpolarizable.Therefore, if the network coordination game is is a-biased andunpolarizable, both conditions (a) and (b) must be satisfied.

8
(If) Given any player i in V \ Sa(h), from the applicationof (25) with R = {i} we obtain that
ahi + wi ≥ ahi + wV\Ri > wRi ≥ 0 .
Since ahi + wi > ahi − wi ≥ 0 for every i in Sa(h), wededuce that ah + w ≥ 0. Together with assumption (a), byProposition 4 (ii), this yields that the game is a-biased. Wefinally prove that the game is unpolarizable. By contradiction,suppose there exists a co-existent equilibrium x∗. Necessarilyx∗i = a for every i in Sa(h). Put R = V−ax∗ and notice that(22) yields
0 ≤ ui(x∗)
= −ahi + w−ai (x∗)− wai (x∗)
= −ahi + wRi − wV\Ri
for every i in R thus contradicting condition (b). The proofis then complete.
Remark 4. In the special case h = (1 − 2r)w consideredin Remark 3, i.e., when players have homogeneous thresholdsri = r in [0, 1], (25) is equivalent to wRi < (1 − r)wi, socondition (b) of Proposition 6 reduces to the non-existence of(1 − r)-cohesive subsets of V \ Sa(h). In the literature [31],such property is referred to as the set V\Sa(h) being uniformlynot (1− r)-cohesive. In this sense, Proposition 6 generalizes[56, Proposition 9.8] to network coordination games withheterogeneous thresholds.
As argued previously in this paper, in many applicationsit is of interest to study the conditions under which consen-sus configurations are the natural outcome of a (distributed)learning process. We conclude this section with the statementbelow, gathering some results on global I- and BR-stabilityof consensus equilibria for network coordination games thatdirectly follow from the analysis just developed.
Corollary 1. For a graph G with out-degree vector w, con-sider the network coordination game on it with external fieldh. Assume that G is h-indecomposable. Then:
(i) if |h| ≤ w, then Nh = {±1} is globally I-stable;(ii) if |h| < w, then Nh = {±1} is globally BR-stable;
(iii) if w � ah, then Nh = {a1} is globally BR-stable.
Proof: (i) Proposition 4 (i) implies that when |h| ≤ w,the game is regular so that the two consensus configurations−1 and +1 are both equilibria. Since G is h-indecomposable,Proposition 5 guarantees that the game is unpolarizable. Then,the set of equilibria is Nh = {±1} and Proposition 1 (iv)guarantees that it is globally I-stable.
(ii) We already know from point (i) that Nh = {±1} isglobally I-stable. The BR-stability follows from the fact thatwhen |h| < w these two equilibria are strict.
(iii) By Lemma 1, Sa(h) 6= ∅, so that the configuration−a1 is not an equilibrium. Since G is h-indecomposable,Proposition 5 implies that N ◦h = ∅. Hence, Nh = {a1}. BR-stability then follows from Proposition 1 (vii).
IV. ROBUST NETWORK COORDINATION
In this section, we introduce and characterize robust ver-sions of the notions introduced in Definitions 7 and 8. For agraph G = (V, E ,W ) and a subset of vectors H ⊆ RV , wesay that a property of the network coordination game on Gis satisfied H-robustly if it is satisfied for every external fieldh in H. In what follows we concentrate on the special casewhen, for two vectors h− and h+ in RV such that h− ≤ h+,the set H is the hyper-rectangle
H = {h : h− ≤ h ≤ h+} =∏i∈V
[h−i , h
+i
]. (27)
In this case, the verification that certain important propertiesare H-robustly satisfied can be significantly simplified withrespect to checking the property for every single value of hin H. Below we report the results in this sense. We start withthe following robust version of Proposition 4.
Corollary 2. Let G be a graph with out-degree vector w andletH be as in (27) for two vectors h− ≤ h+. Then, the networkcoordination game on G is:
(i) H-robustly regular if and only if
w ≥ −h− ∨ h+ ; (28)
(ii) H-robustly a-biased for an action a = ±1 if and only if
ah−a + w ≥ 0 , w � ah−a ; (29)
(iii) H-robustly frustrated if and only if
w � ah−a , ∀a = ±1 .
Another interesting property is the robust unpolarizability,which can be interpreted as the resilience of a networkcoordination game against getting co-existent equilibria. Byvirtue of Proposition 5, this can equivalently be expressed as arobust indecomposability of the graph G. However, it is usefulto reformulate this in a form analogous to Definition 9, as inthe following result.
Theorem 1. Let G = (V, E ,W ) be a graph and let H be as in(27) for two vectors h− ≤ h+. Then, the following conditionsare equivalent:(a) the network coordination game on G is H-robustly unpo-
larizable;(b) G is H-robustly indecomposable;(c) for every nontrivial binary partition of the node set as in
(20), there exists s in {±} and a node i in Vs such that
wsi + shsi < w−si (30)
where wsi = wV
s
i .
Proof: Clearly, equivalence between conditions (a) and(b) directly follows from Proposition 5. We shall now proveequivalence between conditions (a) and (c).
First, assume that the network coordination game on G isnot H-robustly unpolarizable, i.e., there exists an external fieldh in H such that the set of equilibria Nh contains a co-existentconfiguration x∗ 6= ±1. Notice that h−i ≤ hi ≤ h+i implies

9
that x∗i hi ≤ sihsi , where si = sgn(x∗i ), for every player i in
V . Then, Proposition 3 (i) and (12) imply that
0 ≤ ui(x∗)
= x∗i hi + x∗iw+i (x∗)− x∗iw
−i (x∗)
≤ sihsi + wsi
i − w−sii .
Hence, there exists no node i in V satisfying (30) for thenontrivial binary partition V = V+
x∗ ∪ V−x∗ . This proves thatcondition (c) is not satisfied.
On the other hand, if condition (c) is not satisfied, then thereexists a nontrivial binary partition as in (20) such that
wsii + sih
si ≥ w−sii , ∀i ∈ V , (31)
where si in {±} is such that i belongs to Vsi . Let h in [h−, h+]have entries
hi =
{h+i ifx∗i = +1h−i ifx∗i = −1
∀i ∈ V .
Then, G is not h-indecomposable. Thus, Proposition 5 impliesthat the network coordination game on G with external fieldh is polarizable so that condition (a) is not satisfied.
Theorem 1 shows that testing H-robust unpolarizability ofa network coordination game on a graph G can be done byverifying that (30) holds true for every nontrivial binary parti-tion of the node set, which has the same complexity as testingof h-indecomposability of G, i.e., verifying that (21) holdstrue for every nontrivial binary partition of the node set. Ofcourse, in the worst case such complexity remains exponentialin the graph order, since so is the number of nontrivial binarypartition of the node set. However, for specific graphs, the taskcan be much simplified as in the following example.
Example 2 (continued). Let H = {h ∈ RV : −1 ≤ h ≤ 1}.Then, the complete graph with n nodes G isH-indecomposableif and only if n is odd. Indeed, for even n, we have alreadyshown that G is h-decomposable with respect to the externalfield h in H with entries hi = 1 for 1 ≤ i ≤ n/2 and hi = −1for n/2 < i ≤ n. On the other hand, for odd n, consider anynon-trivial binary partition V = V− ∪ V+ and let m = |V+|.If m < n/2, then w+
i +him < n−m = w−i for every playerevery i in V+, so that (30) is satisfied. If m > n/2, thenw−i − h
−i = n−m = mi < w+
i for every player i in V−, sothat (30) is satisfied.
In fact, in an analogous way as Theorem 1 has just beenderived as a robust generalization of Proposition 5, one canprove a robust generalization of Proposition 6. While refrain-ing from doing that explicitly for the sake of conciseness, wefocus on the stability results in Corollary 1, for which, besidestheir straightforward robust generalization, some deeper con-sequences can be derived as reported below. These will in turnprove instrumental for the analysis carried on in next section.
Theorem 2. Let G = (V, E ,W ) be a graph of order n = |V|and let H be as in (27) for two vectors h− ≤ h+. Assumethat G is H-robustly indecomposable. Then,
(i) for every configuration x in X there exists an H-robustI-path from x to {±1} of length at most n. In particular,{±1} is H-robustly globally I-reachable;
(ii) if the network coordination game on G is H-robustlyregular, then the equilibrium setN = {±1} isH-robustlyglobally I-stable;
(iii) if there exists an action a = ±1 such that (29) holdstrue, then there exists an H-robust I-path from everyconfiguration x in X to a1. In particular, in this case,the equilibrium set N = {a1} is H-robustly globallyBR-stable.
Proof: (i) Given an arbitrary configuration x in X ,consider the external field hx in H with entries
hxi = hxii , i ∈ V ,
and let
x = f+(f−(x, hx), hx) , x = f−(f+(x, hx), hx) .
By Proposition 1 (i), the above are the least and greatestequilibria of the network coordination game on G with externalfield hx that are I-reachable from configuration x. As the graphG is H-robustly indecomposable, it follows from Theorem1 that the network coordination game on G is H-robustlyunpolarizable. Since hx ∈ H, this implies that the networkcoordination game on G with external field hx is unpolarizable,so that its equilibria x and x are both consensus configurations.Since clearly x ≤ x, there are three possible alternative cases:(a) x = x = +1;(b) −1 = x < x = +1;(c) x = x = −1.
In both cases (a) and (b) we have
+1 = x = f−(f+(x, hx), hx) = f+(x, hx) ,
so that x ↑ +1 for the network coordination game on G withexternal field hx. We now show that in fact a monotone I-pathfrom x to +1 exists H-robustly by proving that f+(x, h−) =f+(x, hx). Indeed, since in any monotone path only playersoriginally playing action −1 can get activated, and since h−i =hxi for every such player, we have that every monotone pathis an I-path with respect to h− if and only if it is an I-pathwith respect to hx. By the way the function f+ is defined,this yields that
f+(x, h−) = f+(x, hx) = f−(f+(x, hx), hx) = +1 ,
which shows that +1 is reachable from x by a monotoneI-path for the network coordination game on G with ex-ternal field h−. We can then consider any monotone path(x(0), x(1), . . . x(l)) from x(0) = x to x(l) = f+(x, h−) = 1that is an I-path for the network coordination game on G withexternal field h−, where clearly l ≤ |V|. Since network coor-dination games are super-modular families, by Proposition 2(i), this is also a monotone I-path for the network coordinationgame on G with any external field h in H.
Similarly, in both cases (b) and (c) we have
−1 = x = f−(f+(x, hx), hx) = f−(x, hx) ,
so that by an argument completely analogous to the onedeveloped above we can find an H-robust anti-monotone I-path from x to −1. The proof of point (i) is then completed by

10
the observation that the length of monotone and anti-monotoneis never larger than n.
(ii) From point (i), the equilibrium set N = {±1} is H-robustly globally I-reachable. Due to the H-robust regularityassumption, N = {±1} is also H-robustly I-invariant. Hence,N = {±1} is H-robustly globally I-stable.
(iii) Existence of an H-robust I-path from every configura-tion x in X to the equilibrium a1 follows from point (i) andCorollary 2 (ii). On the other hand, Corollary 1 (iii) ensuresBR-invariance of a1 for the network coordination game on Gwith any external field h in H. Therefore, the equilibrium setN = {a1} is H-robustly globally BR-stable.
Example 2 (continued). Let H = {h ∈ RV : −1 ≤ h ≤ 1}.As we have seen, the complete graph G of odd order n is H-robustly indecomposable. In fact, every anti-monotone pathsfrom a configuration x in X with at most (n−1)/2 +1-playersto the consensus equilibrium −1 is an H-robust I-path, so thatx ↓ −1: notice that −1 is the only Nash equilibrium that isH-robustly reachable from x. Simmetrically, every monotonepath from a configuration x in X with at least (n+ 1)/2 +1-players to the consensus equilibrium +1 is anH-robust I-path,so that x ↑ 1: in this case, −1 is the only Nash equilibriumthat is H-robustly reachable from x. In particular, this showsthat the robust global reachability result of Theorem 2 cannotbe sharpened: even though both consensus configurations arerobust equilibria, for each configuration x, only one of themis H-robustly reachable from it.
V. COORDINATION DYNAMICS WITH TIME-VARYINGEXTERNAL FIELDS
In this section and in the next one, we apply the resultsof Section IV to the analysis of interconnections of networkcoordination games with other systems. In particular, in thissection we study asynchronous best response dynamics witha possibly time-varying external field modeling an exogenoussignal and derive sufficient conditions for finite time absorp-tion in consensus configurations.
Consider a network coordination game embedded in atime-varying environment with the coupling described by anexternal field h(t) that is a measurable function of time t ≥ 0.Assume that a learning process takes place among the players,modeled as an asynchronous best response dynamics. Pre-cisely, let every player i in V be equipped with an independentPoisson clock of rate λi > 0. If the clock of player i ticks attime t, player i modifies her current action by choosing anyvalue in her best response correspondence Bi(x−i(t), h(t))uniformly at random, i.e., playing her best response action ifthis is unique and choosing one of the two actions uniformlyat random if these give the same utility.
This mechanism generates a continuous-time Markov chainX(t) on the configuration space X to be referred to as thecoordination dynamics with input field h(t). We shall denotethe transition rate matrix of X(t) by Λ(t) in RX×X , whoseentries Λxy(t) stand for the transition rates from configurationx in X to configuration y in X at time t ≥ 0. Notice that Λ(t)depends on the external field h(t) and for this reason it is time-varying. We have that Λxy(t) = 0 whenever x and y differ in
more than one entry, reflecting the fact that with probability1 no two players will modify their action simultaneously. Onthe other hand, if there exists i in V such that x−i = y−i andxi 6= yi, then Λxy(t) > 0 if and only if yi ∈ Bi(x−i, h(t)), andin this case Λxy(t) = λi/|Bi(x−i, h(t))|. Finally, the diagonalentries of Λ(t) are nonpositive and such that the all row sumsof Λ(t) are null, i.e., Λxx(t) = −
∑y 6=x Λxy(t).
The following result establishes sufficient conditions for theprocess X(t) to converge to a consensus configuration, andshows that such conditions are essentially necessary when thetime-varying external field is an arbitrary exogenous signalh : R+ → H and G is H-robustly indecomposable.
Theorem 3. Let G = (V, E ,W ) be a graph and let H be asin (27) for two vectors h− ≤ h+. For a measurable exogenoussignal h : R+ → H, consider the coordination dynamics X(t)on G with input field h(t) for t ≥ 0. Assume that G is H-robustly indecomposable. Then:
(i) if ah−a+w > 0 and w � ah−a for some action a = ±1,then
P(∃t0 |X(t) = a1, ∀t ≥ t0) = 1 ; (32)
(ii) if w > h+ and w > −h−, then
P(∃t0 |X(t) ∈ {±1}, ∀t ≥ t0) = 1 . (33)
(iii) if w � h+ and w � −h−, then there exists a measurablesignal h : R+ → H such that with probability 1 thecoordination dynamics X(t) on G with input field h(t)visits both consensus configuration +1 and −1 infinitelyoften, hence in particular, it fluctuates forever.
Proof: Notice that the definition of best response dynam-ics and the fact that the actions set is binary imply that thefollowing uniform bounds hold true for the transition rates ofX(t) at any time t ≥ 0:
Λxy(t) > 0 ⇒ Λxy(t) ≥ λ∗2, ∀x, y ∈ X , (34)
∑y 6=x
Λxy(t) ≤ nλ , ∀x ∈ X , (35)
where
n = |V| , λ∗ = mini∈V
λi > 0 , λ =1
n
∑i∈V
λi .
(i)-(ii) We prove the two results at once. First, observe thatthe assumptions on w, h+, and h− imply that in case (i) a1is a strict equilibrium and in case (ii) +1 and −1 are bothstrict equilibria, for every h− ≤ h ≤ h+. Put N = {a1} inthe former case and N = {±1} in the latter. Then, in bothcases, Λxy(t) = 0 for every x ∈ N , y 6= x, and t ≥ 0, so thatN is a trapping set for the Markov chain X(t).
On the other hand, for every initial profile X(0) = x(0),Theorem 2 (i) guarantees the existence of an H-robust I-path(x(0), x(1), . . . x(l)) of length l ≤ n from x(0) to N . Considernow the discrete-time jump process associated to X(t), definedby
Y (k) = X(Tk) , k = 0, 1, . . .

11
where 0 = T0 < T1 < T2 < . . . are the random timeswhen the value of X(t) changes. Using (34) and (35), wecan estimate the probability that the best response dynamicsfollows this path at some time as follows
P(Ys+1 = x(1), . . . , Ys+l = x(l)
∣∣∣Ts = t, Ys = x(0))≥ αl ,
for every s ≥ 0, where
α =λ∗
2nλ∈ (0, 1) .
Since N is trapping, this implies that
P(Ys+n ∈ N |Ts = t, Xs = x0) ≥ αl ≥ αn ,
for every x0 in X , t ≥ 0 and s ≥ 0. A standard inductionargument now yields that, for every initial condition x(0) inX and for every h = 1, 2, . . . ,
P(Yhn 6∈ N |X(0) = x(0)) ≤ (1− α)hn .
Since P(Yk 6∈ N |X(0) = x(0)) is non increasing in k, wehave that
P(Xk 6∈ N |X0 = x(0)) ≤ (1− α)bk/ncn , k ≥ 0 .
Let now TN = inf{t ≥ 0 : X(t) ∈ N} be the first entrancetime of the Markov chain X(t) in N . Then,
P(TN < +∞) = 1− limt→+∞
P(X(t) /∈ N )
= 1− limk→+∞
P(Yk /∈ N )
≥ 1− limk→+∞
(1− α)bk/ncn
= 1 ,
thus proving that, with probability 1, the Nash equilibrium setN is reached in finite time. Since we have already shown thatN is a trapping set, this proves that (32) and (33) hold truein case (i) and case (ii), respectively.
(iii) By assumption, there exist two players i and j in V suchthat wi < h+i and wj < −h−j . Since i ∈ S+(h+) and G isH-robustly indecomposable, Corollary 1 implies that Nh+ ={+1} is BR-stable for the network coordination game on Gwith external field h+. This implies that, for every τ > 0,the coordination dynamics with an input field that is constanth(t) = h+ in the interval [0, τ) is such that
α+ = minx∈X
P(X(τ) = +1|(X(0) = x)) > 0 .
Analogously, j ∈ S−(h−) and G is H-robustly indecompos-able, we get that the coordination dynamics with an input fieldthat is constant h(t) = h− in the interval [0, τ) is such that
α− = minx∈X
P(X(τ) = −1|(X(0) = x)) > 0 .
For the coordination dynamics with periodic piece-wise con-stant input field defined as follows
h(t) =
{h+ if 2kτ ≤ t < (2k + 1)τ k ∈ Z+
h− if (2k + 1)τ ≤ t < (2k + 2)τ k ∈ Z+ ,
we then have that
P(X((2k+1)τ) = +1, X((2k+2)τ) = −1|X(2kτ) = x) ≥ α ,
for every k ∈ Z+ and x ∈ X , where
α = α+α− > 0 .
It then follows that with probability 1 there exist infinitelymany values of k ∈ Z+ such that X((2k + 1)τ) = +1 andX((2k+2)τ) = −1, thus proving that X(t) keeps fluctuatingforever.
Theorem 3 ensures that, for any coordination dynamics withtime-varying external field h(t) with rangeH on a graph G thatis H-robustly indecomposable, finite-time absorption in theset of consensus equilibria is guaranteed provided that either(i) there exist some a-stubborn players and no −a-stubbornplayers even with the most −a-favorable external field h−a
(and in this case there is a unique, consensus equilibrium a1),or (ii) no player has a dominant action with any external fieldin the range H (in which case both consensus configurations±1 are equilibria).
VI. NETWORK COORDINATION WITH NON-COORDINATINGAGENTS
In this section, we consider a scenario of a strategic formgame where players are of mixed nature: a subset of themhave the utility of a coordination game while the rest havedifferent utilities. We determine conditions for the existenceand stability of equilibria of the overall game.
Specifically, we fix a graph G = (V, E ,W ) and twononempty subsets of nodes R,S ⊆ V such that
R∩ S = ∅ , V = R∪ S . (36)
We consider a strategic form game with player set V , binaryaction set A = {±1} and utilities ui(x) as in (11) for everyplayer i in R, and of an arbitrary form (different from (11))for players i in S. We shall refer to such a game as a mixednetwork game with set of coordinating players R and set ofalien agents S. One can think of the alien agents as outsidersthat are perturbing the coordination game. The main point isto understand the extent to which the coordinating playerscan be affected by the alien agents: in particular, under whichconditions do equilibria for this game exist and correspond toglobally I-stable consensus configurations for the coordinatingplayers?
In fact, in this context, equilibria may fail to exist. E.g.,the two-player game with binary action set A = {±1} andutilities u1(x1, x2) = x1x2 and u2(x1, x2) = −x1x2, whichis commonly referred to as the dis-coordination game, isknown not to admit any equilibrium. On the other hand,even for games admitting equilibria whose restriction to theset of coordinating players are consensus configurations, suchequilibria may fail to be I-stable, as illustrated in the followingexample.
Example 3. Let G = (V, E ,W ) be a graph as in Figure3, with all links with weight 1. Consider a mixed networkgame with set of coordinating players R = {1, . . . , 7} havingutility ui(x) = xi
∑j Wijxj and a single alien agent S = {8}
with utility u8(x) = −x8∑
j W8jxj . Then, it can be readilyverified that the equilibrium set is N = {±x∗}, where x∗

12
1
2
3 4 5
6
7
8
Fig. 3: Graph of the mixed network game in Example 3 withset of coordinating playersR depicted in white and alien agentS = {8} in grey.
is the configuration with entries x∗8 = −1 and x∗i = +1 fori = 1, . . . , 7. However,N is not globally BR-reachable (hence,not I-reachable), as the subset of configurations
Y = {y ∈ X : y1 = y2 = y3 = −y5 = −y6 = −y7}
is BR-invariant.
To analyze mixed network games with set of coordinatingplayers R and set of alien players S = V \ R, it provesconvenient to canonically identify the configuration space asthe external product X = Y×Z of the strategy profiles spacesY = AR and Z = AS of players in R and in S, respectively.Correspondingly, we may decompose every strategy profile xin X , as x = (y, z) whereby y = x|R in Y is the strategyprofile of coordinating players and z = x|S in Z is the strategyprofile of alien agents. We also introduce the induced subgraphGR = (R, ER,WR,R) where ER = E ∩ (R×R) and WR,Ris the submatrix of W restricted to rows and columns in thecoordinating player set R.
For every strategy profile z in Z of the alien agents, wemay consider the induced restricted game with player set Rand utility functions
u(z)i (y) = yi
∑j∈R
Wijyj + yi∑j∈S
Wijzj + yihi , (37)
for every coordinating player i in R and coordinating players’strategy profile y in Y . This can be interpreted as a networkcoordination game on the induced subgraph GR with externalfield
h(z) = h|R + (Wz)|R ∈ RR .
If we define
H = {h ∈ RR : h|R − wS|R ≤ h ≤ h|R + wS|R} , (38)
we have that h(z) belongs to H for every alien agents’strategy profile z in Z . Analogously, we consider, for a givencoordinating players’ strategy profile y in Y , the inducedrestricted game with player set S and utility functions
u(y)i (z) = ui(y, z) , (39)
for every alien agent i in S and strategy profile z in Z . Wedenote by N (z)
R and N (y)S , the set of equilibria of, respectively,
the restricted coordination game with player set R when thealien agents are playing z and the restricted game with playerset S when the coordinating agents are playing y. We areinterested in investigating the existence and stability propertiesof equilibria of the mixed network game whose projection onthe set of coordinating players R is a consensus configuration.We denote the set of such configurations as
T = T+1 ∪ T−1 ,
whereTa = {(a1, z) : z ∈ Z} , a = ±1 .
We have the following result.
Theorem 4. For a graph G = (V, E ,W ), consider a mixednetwork game on G with sets of coordinating players R andalien agents S satisfying (36). Assume that(a) GR is H-robustly indecomposable for H as in (38);(b) the sets N (+1)
S and N (−1)S are globally BR-stable for the
game restricted to the set of alien agents;(c)
wR|R > wS|R + |h|R| . (40)
Then, N ∩ T is globally BR-stable.
Proof: Using Theorem 2 (i), one has that {±1} is H-robustly globally I-reachable for the restricted coordinationgame with player set R. In particular, this implies that, forevery z in Z , there exists a in {±1} such that a1 ∈ N (z)
R andthe restricted coordination game with player set R and utilitiesas in (37) admits an I-path (y = y(0), y(1), . . . , y(l) = a1)from y to a1. On the other hand, the assumption on theS-restricted game implies that there exists a BR-path (z =z(0), z(1), . . . , z(m) = z∗) from z to an equilibrium z∗ inN (a1)S for the S-restricted game with utilities as in (39) with
y = a1. It then follows that x∗ = (a1, z∗) ∈ N is anequilibrium and that the concatenation
((y(0)z), (y(1), z), . . . , (a1, z), (a1, z(1)), . . . , (a1, z∗))
is a BR-path for the mixed network game on G with set ofcoordinating players R and set of alien agents S. This provesthat N ∩ T is globally BR-reachable.
Now, observe that (40) guarantees that the consensus con-figurations a1, for a = ±1, are strict equilibria for the R-restricted coordination game with utilities as in (37). Com-bined with the assumption that N (a1)
S is BR-stable for the S-restricted game, this implies that N ∩ Ta is BR-invariant forthe mixed network game for a = ±1. Thus, we have provedthat N ∩ T is globally BR-stable.
Remark 5. It is worth pointing out that variations of theconclusions of Theorem 4 hold true under somewhat differentcombinations of assumptions.
In particular, notice that if
wR|R > wS|R − ah|R , (41)
then coordinating players are in strict equilibrium, whenall playing action a, regardless of what alien agents play.Therefore, if, for some a in {±1}, condition (41) holds trueand N (a1)
S 6= ∅ (i.e., the restricted game with player setS when the coordination players are playing a1 admits anequilibrium), then there exist equilibria of the whole gamewhere coordinating agents are at consensus, i.e., N ∩Ta 6= ∅.If N (a1)
S is also BR-invariant for the game restricted to the setof alien agents, then BR-invariance of N ∩ Ta for the mixednetwork game is ensured.
On the other hand, if (41) holds true and
wR|R � −wS|R + ah|R ,

13
for some a in {±1}, then Theorem 2 (iii) implies that a1 isH-robustly globally BR-stable for the restricted coordinationgame with player set R. If N (a1)
S is globally BR-stable forthe game restricted to the set of alien agents, then arguing asin the proof of Theorem 4 one gets that N ∩ Ta is globallyBR-stable for the mixed network game.
We notice that, in Theorem 4, the assumption of global BR-stability of the sets N (1)
S and N (−1)S for the game restricted
to the set of alien agents is automatically verified when thisis a potential game [57], or its a super-modular game itself.A remarkable example for this former case is that of an anti-coordination game on an undirected graph. This is the casewhen alien agents have utilities
ui(x) = −xi∑j
Wijxj + hixi , i ∈ S . (42)
The ensuing mixed network coordination/anti-coordinationgame has received considerable attention in the recent lit-erature. For the special case of an undirected network con-necting two players, this reduces to the already mentioneddis-coordination game that has no equilibria. For arbitraryundirected graphs we have the following result.
Corollary 3. Let G = (V, E ,W ) be an undirected graph and hin RV a vector. Consider the mixed network coordination/anti-coordination game on G with external field h, and sets of coor-dinating and anti-coordinating players R and S, respectively,satisfying (36). Let (40) hold true. Then,
(i) for a = ±1, the set N ∩Ta is non-empty, i.e., there existsan equilibrium x∗ such that x∗R = a1;
(ii) if GR is H-robustly indecomposable for H as in (38),then the set of equilibria N ∩ T is globally BR-stable.
Proof: The key observation is that, since the graph G isundirected, for every y in Y the S-restricted anti-coordinationgame with utilities
u(y)i (z) = −zi
∑j∈R
Wijyj − zi∑j∈S
Wijzj + hizi , i ∈ S
is a potential game with potential function
Φ(y)(z) = −∑i,j∈S
Wijzizj −∑i∈S
zi∑j∈R
Wijyj +∑i∈S
hizi .
As a consequence, N (y)S is nonempty and globally BR-stable
for every y in Y [57]. Claim (i) then follows from Remark 5and claim (ii) from Theorem 4.
Remark 6. It is clear from the proof above that the assumptionthat the graph G = (V, E ,W ) is undirected in Corollary 3can be relaxed to just the restriction of G to the set of anti-coordinating players S be undirected, i.e.,
Wij = Wji , ∀i, j ∈ S .
Remark 7. It is worth comparing our results with [53], whereconvergence to Nash equilibria is proven for the asynchronousbest-response dynamics in pure network coordination gamesand pure network anti-coordination games for every networktopology and every set of thresholds. While the setup in
1
2
3
5
6
4
7
11
12
9
8
10
Fig. 4: The graph considered in Example 3 with set ofcoordinating players R = {1, . . . , 6} in white and set of alienagents S = {7, . . . , 11} in grey.[53] deals with undirected graphs and makes extensive useof the fact that in this case both pure network coordinationgames and pure network anti-coordination games are potentialgames, the technical challenges in our analysis come fromthe fact that we are effectively dealing with mixed networkcoordination/anti-coordination games, which are not potentialgames.
Corollary 3 provides sufficient conditions for the set ofequilibria of a mixed network coordination/anti-coordinationgame to be nonempty and globally BR-stable, as shown in thefollowing example.
Example 3. Consider the graph G = (V, E ,W ) as in Figure4. Then, for the mixed network coordination/anti-coordinationgame on G with set of coordinating players R = {1, . . . , 7}and external field h = 0, both assumptions in Corollary 3 aresatisfied. In particular, H-robust indecomposability of GR forH as in (38) is equivalent to the robust indecomposability ofthe complete graph subject to an external field −1 ≤ h ≤ 1discussed in Example 2. It then follows from Corollary 3 thatthe set of equilibria N ∩ T is globally BR-stable.
VII. CONCLUSION
We have studied heterogeneous network coordination gameson general weighted directed interaction graphs, equippedwith an external field modeling exogenous interventions orindividual biases towards specific actions. We have provednecessary and sufficient conditions for global stability ofconsensus equilibria under best response type dynamics, ro-bustly with respect to a (constant or time-varying) externalfield. We have then applied these results to the analysisof mixed network coordination and anti-coordination gamesand determined sufficient conditions for existence and globalstability of pure strategy Nash equilibria.
A key step in our analysis has consisted in the introductionof novel robust notions of improvement and best responsepaths. Our analysis have strongly used the fact that coordina-tion games are super-modular, but also their peculiar thresholdstructure of best response correspondences. Extension of suchconcepts and results to more general super-modular games isa challenging problem that deserves further investigation.
APPENDIX APROPERTIES OF FINITE SUPER-MODULAR GAMES
In this Appendix, we prove the technical results of SectionII-B on super-modular games with binary actions. Throughout,

14
we shall assume to have fixed a super-modular game with finiteplayer set V and configuration space X = {±1}V .
First, we state the following direct, though crucial, conse-quence of the increasing difference property (7).
Lemma 2. For every player i in V , both B+i (x−i) andB−i (x−i) are monotone nondecreasing in x−i.
We now move on with the next result characterizing proper-ties of monotone and anti-monotone I- and BR-paths of super-modular games.
Lemma 3. For x, y, z in X , the following relations hold true:(i) x ↑ y, x ↑ z ⇒ x ↑ (y ∨ z)
(ii) x ↓ y, x ↓ z ⇒ x ↓ (y ∧ z)(iii) x ↑ y, x′ ≥ x⇒ x′ ↑ (y ∨ x′)(iv) x ↓ y, x′ ≤ x⇒ x′ ↓ (y ∧ x′)(v) x→ y ⇒ x ↑ y′, x ↓ y′′ for some y′′ ≤ y ≤ y′.
Moreover, the analogous results hold true for the BR-case.
Proof: We prove (i). Let (y(0), y(1), . . . y(l)) and(z(0), z(1), . . . z(r)) be two monotone I-paths from x to, re-spectively, y and z. Let (i1, . . . , il) and (j1, . . . , jr) be the twocorresponding sequences of active players. Let (js1 , . . . , jsk)be the subsequence of (j1, . . . , jr) consisting of exactly thoseplayers that are not in the sequence (i1, . . . , il). We claim thatthe sequence (x(0), . . . , x(l+r)) defined by• x(h) = y(h) for h = 0, . . . , l,• x(h+l) = x(h+l−1) + δjsh for h = 1, . . . , k
is a monotone I-path from x to y∨z. By construction, the pathis admissible and monotone. Moreover, x(h+l−1) ≥ z(sh−1)
for every h = 1, . . . , k. Since {+1} = Bjsh (z(sh−1)), byLemma 2, {+1} = Bjsh (x(h−1+l)). This implies that it isan I-path. Proof of (ii) is completely analogous.
We prove (iii). Let (x(0), x(1), . . . , x(l)) be a monotone I-path from x to y with set of active players (i1, . . . , il). Con-sider the subsequence (is1 , . . . , isk) of those players for whichx and x′ coincide. Then, (x(0)∨x′, x(is1 )∨x′, . . . , x(isk )∨x′)is a monotone I-path from x′ to y∨x′. Indeed, notice that, byconstruction, x(isk )∨x′ = x(l)∨x′ = y∨x′. We only need toshow that it is an I-path. Since (x(ish ) ∨ x′)−ish ≥ x
(ish )
−ishand
using the increasing difference property (7) we obtain that
0 ≤ uish (x(ish ))− uish (x(ish−1))
≤ uish (x(ish ) ∨ x′)− uish (x(ish−1) ∨ x′) .
The proof of (iii) is complete. The proof of (iv) is completelyanalogous.
(v): If x ↑ y, then y ∨ x = y. If x ↓ y, then x ≥ y andy∨x = x. In both cases the result is evident. The general casecan be proven by induction on the length of a minimal I-pathfrom x to y. Indeed, by definition of an I-path, for sure wecan find an intermediate configuration z for which one of thetwo possible cases hold: x ↑ z → y or x ↓ z → y. In the firstcase, using the induction hypothesis z ↑ y′ ≥ y, we obtainby transitivity that x ↑ y′ ≥ y. In the second case, using theinduction hypothesis z ↑ y′ ≥ y and point (iii), we obtain thatx ↑ (x′ ∨ y′) ≥ y. Similarly we prove the other relation.
Finally, the proofs for the analogous results in the BR-casecan be obtained by the same identical arguments.
The following result gathers some elementary key factsconnected to the maps (8).
Lemma 4. The following facts hold true:(i) f+, f−, g+, g− are monotone nondecreasing maps;
(ii) a configuration x in X is an equilibrium if and only if
f+(x) = x = f−(x) ;
(iii) a configuration x in X is a strict equilibrium if and onlyif
g+(x) = x = g−(x) .
Proof: (i): It follows from Lemma 3 (i) that x ↑ f+(x)for every configuration x in X . If x′ ≥ x, Lemma 3 (iii) yieldsx′ ↑ f+(x) ∨ x′. Therefore f+(x′) ≥ f+(x) ∨ x′ ≥ f+(x).Proofs for f−, g+, g− are analogous.
(ii) and (iii) coincide with the definitions of equilibrium and,respectively, strict equilibrium.
We are now ready to prove Proposition 1, which we restatebelow for the reader’s convenience.
Proposition 1. Consider a finite super-modular game withbinary action sets. Then, for every configuration x in X ,
(i) f−(f+(x)) ∈ N and f+(f−(x)) ∈ N are, respectively,the greatest and least equilibria I-reachable from x;
(ii) f−(g+(x)) ∈ N and f+(g−(x)) ∈ N are, respectively,the greatest and least equilibria BR-reachable from x;
(iii) if x ∈ N , then g+(x), g−(x) ∈ N are, respectively, thegreatest and least equilibria BR-reachable from x.
Moreover,(iv) the set of equilibria N is a complete lattice and is
globally stable;(v) the two configurations
x∗ = f+(g−(−1)) = f+(−1) ,
x∗ = f−(g+(+1)) = f−(+1) ,(43)
are, respectively, the least and greatest equilibria;(vi) for two equilibria x and y in N , f+(x∨y) and f−(x∧y)
are, respectively, the least and the greatest equilibria thatare, respectively, above and below both x and y;
(vii) if x∗ = x∗ = x∗, then N = {x∗} is globally BR-stable.
Proof: (i) Put X+ = {x ∈ X | f+(x) = x}. We noticethat for every x ∈ X , f+(x) ∈ X+. Moreover, X+ is closedwith respect to anti-monotone I-path. Namely, if x ∈ X+ andx ↓ y, then also y ∈ X+. To see this, by induction, it issufficient to prove it when x and y are connected by an anti-monotone I-path of length 1, namely there exists i ∈ V suchthat yi < xi, y−i = x−i, and Bi(y) = {−1}. If y 6∈ X+, thenit would exists z ∈ X and a player j ∈ V such that zj > yj ,z−j = y−j , and Bj(y) = {+1}. Evidently j 6= i and fromLemma 3 (iii) applied to y ↑ z and x ≥ y we would obtainx ↑ x ∨ z. Since by construction x ∨ z 6= x, this would implythat f+(x) 6= x contrarily to the assumption that x ∈ X+.Similarly, X− = {x ∈ X | f−(x) = x} is closed with respectto monotone I-path. Notice that N = X+ ∩ X−.
Consider now y = f−(f+(x)). Being in the image of f−,necessarily y ∈ X−. On the other hand, since f+(x) ∈ X+,

15
by the fact that X+ is closed with respect to anti-monotoneI-path, we have that also y ∈ X+. Hence y is a Nash. Theargument for f+(f−(x)) is completely analogous.
If now y in N is any equilibrium reachable from x, namelyx → y, by Lemma 3 (v) it follows that x ↑ y′ ≥ y. Bydefinition of f+(x) we have that f+(x) ≥ y′ ≥ y. Therefore,by Lemma 4 (i), we have that
f−(f+(x)) ≥ f−(y) = y ,
with the last equality above following from Lemma 4 (ii).Similarly, we can show that f+(f−(x)) ≤ y. This concludesthe proof of point (i).
(ii) and (iii) can be proven along the same lines as point (i).We omit the details.
(v) It follows from point (ii) that the configurations x∗ andx∗ defined in (43) are indeed equilibria. Given any equilibriumx in N , let x− = g−(x) and x+ = g+(x). Point (iii) impliesthat both x− and x+ are equilibria, hence f+(x−) = x− andf−(x+) = x+ by Lemma 4 (ii). Since x− ≤ x ≤ x+, itfollows from Lemma 4 (i) that
x∗ = f+(−1) ≤ f+(g−(x)) = x− ≤ x ,
x ≤ x+ = f−(g+(x)) ≤ f−(+1) = x∗ ,
so that x∗ ≤ x ≤ x∗.(vi) For x, y in N we have f−(x) = x and f−(y) = y by
Lemma 4 (ii). It then follows from Lemma 4 (i) that
x = f−(x) ≤ f−(x ∨ y) , y = f−(y) ≤ f−(x ∨ y) ,
so thatx ∨ y ≤ f−(x ∨ y) ≤ x ∨ y .
Hence, f−(x ∨ y) = x ∨ y, so that
f+(x ∨ y) = f+(f−(x ∨ y)) ∈ N .
On the other hand, every z in N such that z ≥ x and z ≥ y issuch that z ≥ x∨ y and thus z = f+(z) ≥ f+(x∨ y) provingthat f+(x ∨ y) is the smallest of the Nash above both x andy. The claim on f−(x ∧ y) is completely analogous.
(iv) Point (vi) implies that the set of equilibria N is acomplete lattice. By definition, N is invariant, while globalreachability follows from point (i).
(vii) Point (iii) that implies N = {x∗} is globally I-reachable and thus also globally BR-reachable. Moreover,notice that point (iii) implies that both g−(x∗) and g+(x∗)are equilibria, so that the assumption N = {x∗} implies thatg−(x∗) = x∗ = g+(x∗). Hence {x∗} is BR-invariant.
REFERENCES
[1] L. Arditti, G. Como, F. Fagnani, and M. Vanelli, “Equilibria and learningdynamics in mixed network coordination/anti-coordination game,” inProceedings of the 60th IEEE Conference on Decision and Control,2021.
[2] K. Zhou, J. C. Doyle, and K. Glover, Robust and Optimal Control.Prentice Hall, 1996.
[3] S. Rinaldi, J. P. Perenboom, and T. K. Kelly, “Identifying, understanding,and analyzing critical infrastructure interdependencies,” IEEE ControlSystems Magazine, vol. 21, no. 6, pp. 11–25, 2001.
[4] Disaster Resilience: a National Imperative. The National AcademiesPress, 2012.
[5] K. Savla, G. Como, and M. A. Dahleh, “Robust network routingunder cascading failures,” IEEE Transactions on Network Science andEngineering, vol. 1, no. 1, pp. 53–66, 2014.
[6] G. Como, “On resilient control of dynamical flow networks,” AnnualReviews in Control, vol. 43, pp. 80–90, 2017.
[7] L. Eisenberg and T. H. Noe, “Systemic risk in financial networks,”Management Science, vol. 47, no. 2, pp. 237–249, 2001.
[8] A. Haldane and R. May, “Systemic risk in banking ecosystems,” Nature,vol. 469, pp. 351–355, 2011.
[9] D. Acemoglu, A. Ozdaglar, and A. Tahbaz-Salehi, “Systemic risk andstability in financial networks,” American Economic Review, vol. 105,no. 2, pp. 564–608, 2015.
[10] L. Massai, G. Como, and F. Fagnani, “Equilibria and systemic risk insaturated networks,” Mathematics of Operations Research, 2021.
[11] D. Acemoglu, M. Dahleh, I. Lobel, and A. Ozdaglar, “Bayesian learningin social networks,” Review of Economic Studies, vol. 78, no. 4,pp. 1201–1236, 2011.
[12] D. Acemoglu, G. Como, F. Fagnani, and A. Ozdaglar, “Opinion fluctua-tions and disagreement in social networks,” Mathematics of OperationsResearch, vol. 38, no. 1, pp. 1–27, 2013.
[13] D. Acemoglu, V. Carvalho, A. A. Ozdaglar, and Tahbaz-Salehi., “Thenetwork origins of aggregate fluctuations,” Econometrica, vol. 80,pp. 1977–2016, 2012.
[14] D. R. Baqaee, “Cascading failures in production networks,” Economet-rica, vol. 86, no. 5, pp. 1819–1838, 2018.
[15] D. Acemoglu, A. Ozdaglar, and A. Tahbaz-Salehi, “Networks, shocksand systemic risk,” in The Oxford Handbook on the Economics ofNetworks, ch. 21, pp. 569–607, Oxford University Press, 2016.
[16] G. Como, K. Savla, D. Acemoglu, M. A. Dahleh, and E. Frazzoli,“Robust distributed routing in dynamical networks - part II: Strongresilience, equilibrium selection and cascaded failures,” IEEE Trans.Automatic Control, vol. 58, no. 2, pp. 333–348, 2013.
[17] G. Como, E. Lovisari, and K. Savla, “Throughput optimality and over-load behavior of dynamical flow networks under monotone distributedrouting,” IEEE Transactions on Control of Network Systems, vol. 2,no. 1, pp. 57–67, 2015.
[18] T. Sarkar, M. Roozbehani, and M. A. Dahleh, “Asymptotic networkrobustness,” IEEE Transactions on Control of Network Systems, vol. 6,no. 2, pp. 812–821, 2019.
[19] K. Savla, J. S. Shamma, and M. A. Dahleh, “Network effects on therobustness of dynamic systems,” Annual Review of Control, Robotics,and Autonomous Systems, vol. 3, no. 1, pp. 115–149, 2020.
[20] A. Galeotti, S. Goyal, M. Jackson, F. Vega-Redondo, and L. Yariv,“Network games,” The Review of Economic Studies, vol. 77, no. 1,pp. 218–244, 2010.
[21] Y. Bramoulle, R. Kranton, and M. D’Amours, “Strategic interaction andnetworks,” American Economic Review, vol. 104, no. 3, pp. 898–930,2014.
[22] M. O. Jackson and Y. Zenou, Handbook of game theory with economicapplications, vol. 4, ch. Games on networks, pp. 95–163. Elsevier, 2015.
[23] Y. Bramoulle and R. Kranton, Games played on networks, vol. TheOxford Handbook of the Economics of Networks, ch. 5. OxfordUniversity Press, 2016.
[24] F. Parise and A. Ozdaglar, “Analysis and interventions in large networkgames,” Annual Review of Control, Robotics, and Autonomous Systems,vol. 4, pp. 455–486, 2021.
[25] A. C. Pigou, The economics of welfare. Palgrave Macmillan, 1920.[26] M. Beckman, C. B. McGuire, and C. B. Winsten, Studies in the
economics of transportation. New Heaven: Yale University Press, 1956.[27] A. Galeotti, B. Golub, and S. Goyal, “Targeting interventions in net-
works,” Econometrica, vol. 88, no. 6, pp. 2445–2471, 2020.[28] C. Ballester, A. Calvo-Armengol, and Y. Zenou, “Who’s who in net-
works. wanted: The key player,” Econometrica, vol. 74, no. 5, pp. 1403–1417, 2006.
[29] P. Milgrom and J. Roberts, “Rationalizability, learning, and equilibriumin games with strategic complementarities,” Econometrica, vol. 58, no. 6,pp. 1255–1277, 1990.
[30] X. Vives, “Nash equilibrium with strategic complementarities,” Journalof Mathematical Economics, vol. 19, pp. 305–321, 1990.
[31] S. Morris, “Contagion,” The Review of Economic Studies, vol. 67, no. 1,pp. 57–78, 2000.
[32] H. P. Young, Individual Strategy and Social Structure: An EvolutionaryTheory of Institutions. Princeton University Press, 2001.
[33] H. P. Young, “The evolution of conventions,” Econometrica: Journal ofthe Econometric Society, pp. 57–84, 1993.

16
[34] H. Young, The Diffusion of Innovations in Social Networks, vol. Econ-omy as an evolving complex system, pp. 267–282. Oxford UniversityPress US, 2006.
[35] A. Montanari and A. Saberi, “The spread of innovations in socialnetworks,” Proceedings of the National Academy of Sciences, vol. 107,no. 47, pp. 20196–20201, 2010.
[36] L. Blume, “The statistical mechanics of strategic interaction,” Gamesand Economic Behavior, vol. 5, pp. 387–424, 1993.
[37] M. Kandori, G. J. Mailath, and R. Rob, “Learning, mutation, and longrun equilibria in games,” Econometrica, vol. 61, no. 1, 1993.
[38] G. Ellison, “Learning, local interaction, and coordination,” Economet-rica, vol. 61, no. 5, pp. 1047–1071, 1993.
[39] L. Blume, “The statistical mechanics of best response strategy revision,”Games and Economic Behavior, vol. 11, no. 2, pp. 111–145, 1995.
[40] M. Granovetter, “Threshold models of collective behavior,” AmericanJournal of Sociology, vol. 83, no. 6, pp. 1420–1443, 1978.
[41] M. Lelarge, “Diffusion and cascading behavior in random networks,”Games and Economic Behavior, vol. 75, pp. 752–775, 2012.
[42] E. Adam, M. A. Dahleh, and A. Ozdaglar, “On the behavior of thresholdmodels over finite networks,” in Proceedings of 51st IEEE Conferenceon Decision and Control, CDC’12, pp. 2672–2677, 2012.
[43] W. S. Rossi, G. Como, and F. Fagnani, “Threshold models of cascadesin large-scale networks,” IEEE Transactions on Network Science andEngineering, vol. 6, no. 2, pp. 158–172, 2017.
[44] K. R. Apt, S. Simon, and D. Wojtczak, “Coordination games on weighteddirected graphs,” Mathematics of Operations Research, 2021.
[45] D. Kempe, J. Kleinberg, and E. Tardos, “Maximizing the spread ofinfluence through a social network,” in Proceedings of SIGKDD’03,pp. 137–146, 2003.
[46] G. Como, S. Durand, and F. Fagnani, “Optimal targeting insupermodular games,” IEEE Transactions on Automatic Control,vol. https://arxiv.org/abs/2009.09946, 2021.
[47] K. Paarporn, B. Canty, P. N. Brown, M. Alizadeh, and J. R. Marden,“The impact of complex and informed adversarial behavior in graphicalcoordination games,” IEEE Transactions on Control of Network Systems,vol. 8, no. 1, pp. 200–211, 2021.
[48] K. Paarporn, M. Alizadeh, and J. R. Marden, “A risk-security tradeoffin graphical coordination games,” IEEE Transactions on AutomaticControl, vol. 66, no. 5, pp. 1973–1985, 2020.
[49] M. Jackson and E. Storms, “Behavioral communities and the atomicstructure of networks,” Available at SSRN 3049748, 2019.
[50] D. M. Topkins, “Equilibrium points in nonzero-sum n-person submodu-lar games,” SIAM Journal on Control and Optimization, vol. 17, no. 6,pp. 773–787, 1979.
[51] D. M. Topkins, Supermodularity and Complementarity. PrincetonUniversity Press, 1998.
[52] Y. Bramoulle, “Anti-coordination and social interactions,” Games andEconomic Behavior, vol. 58, no. 1, pp. 30–49, 2007.
[53] P. Ramazi, J. Riehl, and M. Cao, “Networks of conforming and noncon-forming individuals tend to reach satisfactory decisions,” Proceedingsof the National Academy of Sciences of the United States of America,vol. 113, no. 46, pp. 12985–12990, 2016.
[54] A. Monaco and T. Sabarwal, “Games with strategic complements andsubstitutes,” Economic Theory, vol. 62, no. 1, pp. 65–91, 2016.
[55] M. Vanelli, L. Arditti, G. Como, and F. Fagnani, “On games withcoordinating and anti-coordinating agents,” in Proceedings of the 21stIFAC World Congress, 2020.
[56] M. O. Jackson, Social and Economic Networks. Princeton UniversityPress, 2008.
[57] D. Monderer and L. Shapley, “Potential games,” Games and EconomicBehavior, vol. 14, pp. 124–143, 1996.
Laura Arditti is a PhD student in Applied Mathe-matics at the Department of Mathematical Sciences,Politecnico di Torino, Italy. She received the B.Sc.in Physics Engineering in 2016 and the M.S. inMathematical Engineering in 2018, both magna cumlaude from Politecnico di Torino. Her research isconcentrated on game theory, its relationship withgraphical models, and its applications to infrastruc-ture, social, economic, and financial networks.
Giacomo Como is a Professor at the Department ofMathematical Sciences, Politecnico di Torino, Italy,and a Senior Lecturer at the Automatic ControlDepartment of Lund University, Sweden. He re-ceived the B.Sc., M.S., and Ph.D. degrees in AppliedMathematics from Politecnico di Torino, in 2002,2004, and 2008, respectively. He was a Visiting As-sistant in Research at Yale University in 2006–2007and a Postdoctoral Associate at the Laboratory forInformation and Decision Systems, MassachusettsInstitute of Technology, from 2008 to 2011. He
currently serves as Associate Editor of the IEEE Transactions on NetworkScience and Engineering and of the IEEE Transactions on Control of NetworkSystems and as chair of the IEEE-CSS Technical Committee on Networks andCommunications. He was the IPC chair of the IFAC Workshop NecSys’15and a semiplenary speaker at the International Symposium MTNS’16. Heis recipient of the 2015 George S. Axelby Outstanding Paper Award.His research interests are in dynamics, information, and control in networksystems with applications to cyber-physical systems, infrastructure networks,and social and economic networks.
Fabio Fagnani received the Laurea degree in Math-ematics from the University of Pisa and the ScuolaNormale Superiore, Pisa, Italy, in 1986. He receivedthe PhD degree in Mathematics from the Universityof Groningen, Groningen, The Netherlands, in 1991.From 1991 to 1998, he was an Assistant Professorof Mathematical Analysis at the Scuola NormaleSuperiore. In 1997, he was a Visiting Professor atthe Massachusetts Institute of Technology (MIT),Cambridge, MA. Since 1998, he has been with thePolitecnico of Torino, where since 2002 he has been
a Full Professor of Mathematical Analysis. From 2006 to 2012, he has actedas Coordinator of the PhD program in Mathematics for Engineering Sciencesat Politecnico di Torino. From June 2012 to September 2019, he served as theHead of the Department of Mathematical Sciences, Politecnico di Torino. Hiscurrent research topics are on cooperative algorithms and dynamical systemsover graphs, inferential distributed algorithms, and opinion dynamics. He is anAssociate Editor of the IEEE Transactions on Automatic Control and served inthe same role for the IEEE Transactions on Network Science and Engineeringand of the IEEE Transactions on Control of Network Systems.
Martina Vanelli is a PhD student in Applied Math-ematics at the Department of Mathematical Sci-ences (DISMA), Politecnico di Torino, Italy. Shereceived the B.Sc. and M.S. degrees in AppliedMathematics from Politecnico di Torino, in 2017and 2019, respectively. From October 2018 to March2019, she was a visiting student at Technion, Israel.Her research interests include game theory, auctiontheory, and network systems with applications tosocial and economic networks and power markets.