Embed Size (px)
Citation preview

Available online at www.sciencedirect.com
Systems & Control Letters 53 (2004) 89–105www.elsevier.com/locate/sysconle
Robust analysis and synthesis for a class of uncertain nonlinearsystems with multiple equilibria�
Ying Yang∗, Rao Fu, Lin HuangDepartment of Mechanics and Engineering Science, Center for Systems and Control, Peking University, Beijing 100871, PR China
Received 21 June 2003; received in revised form 14 December 2003; accepted 26 February 2004
Abstract
This paper focuses on a class of uncertain nonlinear systems which are subject to norm-bounded parameter uncertaintyin the forward path and a vector-valued periodic nonlinearity in the feedback path, and addresses robust analysis and syn-thesis problems for such systems. Su5cient conditions for global asymptotic stability are derived in terms of linear matrixinequalities (LMIs) and a technique for the estimation of the uncertainty bound is proposed by solving a generalized eigen-value minimization problem. The problem of robust synthesis is concerned with designing a feedback controller such thatthe resulting closed-loop system is globally asymptotically stable for all admissible uncertainties. It is shown that a solutionto the robust synthesis problem for the uncertain system can be obtained by solving a synthesis problem for an uncertaintyfree system. A concrete example is presented to demonstrate the applicability and validity of the proposed approach.c© 2004 Elsevier B.V. All rights reserved.
Keywords: Nonlinear systems; Multiple equilibria; Norm-bounded parameter uncertainties; Analysis and synthesis; LMI
1. Introduction
The past decades has witnessed signi?cant advances in stability analysis and synthesis for nonlinear feedbacksystems, see [7,13,14,17,18] and the references therein. But most of the results were applied and developedwithin the frames of absolute stability theory which was constructed for investigation of global stability ofsystems with single equilibrium. Meanwhile engineers often have to deal with systems with multiple equilibria,types of equilibria sets being rather diverse. In this case, new stability problems appeared. Since these problemscannot be investigated by means of classical Lyapunov or Popov tools, the necessity arises to develop theclassical theory in such a way that it should be possible to use it for stability investigation of systems withmultiple equilibria. Motivated by these facts, the qualitative theory of systems with multiple equilibria hasbeen established to investigate global behavior of solutions for systems with multiple equilibria. This theorystarts from the paper of Moser [12] and has been developed in a comprehensive way by Yakubovich, Leonovand their co-workers [5,10]. Interesting work in this ?eld, in the context of integral and integro-diDerentialequations, can be seen in [2,11].
� This work was supported by the National Science Foundation of China under Grant 60334030,10272001.∗ Corresponding author. Tel.: +86-1062751815; fax: +86-1062764044.E-mail addresses: [email protected] (Y. Yang), [email protected] (R. Fu), [email protected] (L. Huang).
0167-6911/$ - see front matter c© 2004 Elsevier B.V. All rights reserved.doi:10.1016/j.sysconle.2004.02.024

90 Y. Yang et al. / Systems & Control Letters 53 (2004) 89–105
The behavior of solutions with respect to entire set of equilibria has not only purely theoretical interest forthe qualitative theory of diDerential equations, but also important applied signi?cance. Note that a broad classof diDerential equations with angular coordinates in mechanics, phase-synchronization and other ?elds can bewritten in the form
x = f(x) (1.1)
with the vector ?eld f : Rn → Rn having the property f(x) =f(x+ d) for every d∈� and x∈Rn, where �is a subgroup of Rn de?ned by � := {∑mi=1 kidi|ki ∈Z}; m6 n and {di}mi=1 are linearly independent vectorsin Rn. Such systems are often called systems with cylindrical phase space, and are also called pendulum-likesystems with respect to � in [10,16]. In the previous literature [5,9,10,16,21], some important global asymp-totic properties which characterizes the behavior of solutions for systems with multiple equilibria have beenintensively studied and frequency-domain inequalities conditions have been established. However, comparedwith the richness of the exiting results on robust analysis and synthesis for nonlinear systems with singleequilibrium, there is almost no robustness results or synthesis results of designing feedback controller to en-sure those properties for systems with multiple equilibria. The aim of this paper is to bridge this gap byinvestigating a class of nonlinear feedback systems with periodic nonlinearities and provide a more completepicture of the behavior of solutions with respect to entire set of equilibria.In this paper, we will consider the robust analysis and synthesis problem for a class of uncertain nonlinear
systems which are subject to norm-bounded parameter uncertainty in the forward path and a vector-valuedperiodic nonlinearity in the feedback path. The system under consideration will be described by a state-spacemodel which contains parameter uncertainties in both the state and input matrices. Based on the Kalman–Yakubovich–Popov lemma connecting the frequency-domain inequality and linear matrix inequality [15], suf-?cient conditions of global asymptotic stability for uncertain systems are given in terms of the existence ofsolutions of a set of LMIs. Meanwhile, the robust synthesis problem is addressed by designing a feedbackcontroller such that the resulting closed-loop system is globally asymptotically stable for all admissible un-certainties. It will be shown that the robust synthesis problem can be converted into a synthesis problem foran uncertainty free system. Parallel results in H∞ control and positive real control for linear systems canbe seen in [6,20], but the results in this paper are believed to be new in the context of global asymptoticanalysis and synthesis for uncertain nonlinear systems with multiple equilibria. Furthermore, the formulationdiDers from [6,20] in that it involves no parameter searching by using the linear matrix inequality method.With this LMI approach, the largest allowable magnitude of the admissible uncertainty can also be explicitlycomputed by solving a generalized eigenvalue minimization problem which is essentially a convex optimiza-tion problem and numerically e5cient. It should be pointed out here that the methodology used in this paperis not restricted to the class of systems under consideration. In fact, the existing formulations of criteria forstability, dichotomy and instability of the class of Lur’e systems in terms of the frequency response of thelinear part of the system can also be recast into the framework of LMIs and the corresponding robust analysisand synthesis results can be derived in a similar way.The rest of this paper is organized as follows: Section 2 presents some basic results necessary for the
successive development, while in Section 3, we give some LMI-based global asymptotic stability results forsystems with norm-bounded parameter uncertainties; Section 4 presents both the static state and dynamicoutput feedback controller existence conditions for such uncertain systems and shows that the robust synthesisproblem can be converted into a synthesis problem for an uncertainty free system. Section 5 gives a concreteexample showing the application of the proposed method and we end this paper by a few concluding remarksin Section 6.
Notation: Rn×n is the set of n × n real matrices. For a matrix A, AT denotes its transpose, A∗ its complexconjugate transpose. The matrix inequality A¿B (A¿B) means that A and B are square Hermitian matricesand A− B is positive (semi-)de?nite. He is Hermit operator with HeA= A+ AT.

Y. Yang et al. / Systems & Control Letters 53 (2004) 89–105 91
2. Preliminaries
In this section, we review some useful results which will play crucial roles in this paper. First let us considera nonlinear feedback system of the form
x = Ax + B’(z); z = Cx + D’(z); (2.1)
where A∈Rn×n; B∈Rn×m; C ∈Rm×n; D∈Rm×m. We suppose that (A; B) is controllable, (A; C) is observableand ’ : Rm → Rm is a vector-valued function having the components ’i(z) = ’i(zi) with z = (z1; z2; : : : ; zm)T.We assume that every component ’i : R → R is �i periodic, satis?es a local Lipschitz condition and possessesa ?nite number of zeroes on [0; �i), and for each component ’i there exists z0i such that ’i(z0i) = 0 and’i(z0i) �= 0. Let us introduce the vector di = (0; : : : ; 0; �i; 0; : : : ; 0), where �i is the (n+ i)th component of di,then system (2.1) is pendulum-like with respect to � = {∑mi=1 kidi; ki ∈Z}. Assume that
�i =
∣∣∣∣∣∫ �i0’i(z) dz
∣∣∣∣∣/∫ �i
0|’i(z) |dz; i∈m
and denotes �= diag{�1; �2; : : : ; �m}. The transfer function of the linear part of (2.1) from the input ’ to theoutput −z is given by
K(s) = C(A− sI)−1B− D:Suppose that K(0) is nonsingular and det A �= 0. Any equilibrium of (2.1) satis?es
Axeq =−B’(zeq); Cxeq =−D’(zeq) (2.2)
and consequently we have
(D − CA−1B)’(zeq) = 0:
By the assumption above, we can get that ’(zeq)=0 and every component (zeq)i is a zero of ’i; i=m. Fromthe ?rst equation of (2.2) it follows that xeq = 0. Since ’i is �i-periodic, system (2.1) has in?nitely manyisolated equilibria.
De�nition 2.1 (Leonov et al. [8]). System (2.1) is said to be globally asymptotically stable if each solutionof it tends to a certain equilibrium as t → +∞.
Remark 2.1. Note that in De?nition 2.1 it is not implied that all equilibria of (2.1) are Lyapunov stable.Moreover, it can be shown that in the case of global asymptotic stability of system (2.1) there exists atleast one equilibrium that is not asymptotically stable [8]. In the following sections, we consider the globalasymptotic stability in the sense of De?nition 2.1 for system (2.1) with parameter uncertainties.
To derive our main results, we also need the following lemmas.
Lemma 2.1 (Leonov et al. [10]). Suppose K(s) is stable and there exist diagonal matrices �=diag{�1; �2; : : : ;�m}, �=diag{�1; �2; : : : ; �m} and �=diag{�1; �2; : : : ; �m} with �¿ 0 and �¿ 0 satisfying the following condi-tions:
1. 12 He[�K(i!)− K(i!)�K∗(i!)]− �¿ 0;
2. 4��¿ (��)2
then system (2:1) is globally asymptotically stable.

92 Y. Yang et al. / Systems & Control Letters 53 (2004) 89–105
Lemma 2.2 (Rantzer [15]). Given A∈Rn×n; B∈Rn×n; M = MT ∈R(n+m)×(n+m), with det(j!I − A) �= 0 for!∈R and (A; B) controllable, the following two statements are equivalent:
1. [( j!I − A)−1B
I
]∗
M
[(j!I − A)−1B
I
]6 0;
∀!∈R ∪ {∞};2. there exists a matrix P = PT ∈Rn×n such that
M +
[ATP + PA PB
BTP 0
]6 0:
The corresponding equivalence for strict inequalities holds even if (A; B) is not controllable.
Lemma 2.3. Let T1 = TT1 ; T2; T3 be real matrices of appropriate size, then the following statements areequivalent:
1. T1 + He(T2�T3)¡ 0; ∀� : �T�6 !2I ;2. there exists a positive number "¿ 0 such that
T1 + "!2T2TT2 +1"TT3 T3¡ 0; (2.3)
3. there exists a positive number "¿ 0 such that[T1 + "!2T2TT2 TT3
T3 −"I
]¡ 0; (2.4)
4. there exists a positive number "¿ 0 such that[T1 + "!2TT3 T3 T2
TT2 −"I
]¡ 0: (2.5)
Remark 2.2. The above result is not new and, in fact, is well known in the robustness analysis literatures.Here we give it in an alternative form of LMI. The advantage of this representation is that when there is LMIvariable in T2 which can result in a product term with ", we can resort to using (2.5) for convex optimizationand vice versa. This method does not involve any parameter searching so that there is no need to considerthe convergence property of (2.5).
3. Robust analysis
In this section, we derive the global asymptotical stability results for system (2.1) when there is norm-boundedparameter uncertainties in the linear part. First, we give a theorem which establishes the connection betweenthe frequency-domain conditions given in Lemma 2.1 and an LMI-based criterion.
Theorem 3.1. Suppose A is Hurwitz, then the conditions of Lemma 2:1 are satis<ed if and only if thereexist P = PT¿ 0 and diagonal matrices �, �¿ 0 and �¿ 0 such that[
CT�C CT(�D + 12 �)
(DT�+ 12 �)C �+ DT�D + 1
2(�D + DT�)
]+
[ATP + PA PB
BTP 0
]6 0; (3.1a)

Y. Yang et al. / Systems & Control Letters 53 (2004) 89–105 93
[2� ��
�� 2�
]¿ 0: (3.1b)
Proof. Let
M =
[CT�C CT(�D + 1
2 �)
(DT�+ 12 �)C �+ DT�D + 1
2(�D + DT�)
]
and using Lemma 2.2, we can prove the equivalence of (3.1a) and condition (1) of Lemma 2.1. Note that theupper left corner of M is positive semide?nite, it follows from (3.1a) and Hurwitz stability of A that P¿ 0.(3.1b) is directly derived from condition (2) of Lemma 2.1.
Remark 3.1. The signi?cance of this theorem is that, by using Lemma 2.2 we convert the conditions ofLemma 2.1 into an equivalent LMI requirement. From this LMI condition, it is possible to extend the resultsto take into account the parameter uncertainty in the linear part of the system and derive feedback controllaw which renders the closed-up system globally asymptotically stable by using the e5cient numerical linearmatrix inequalities methods.
As an immediate consequence, we have a more convenient criterion as stated in the following.
Corollary 3.1. If there exist P = PT¿ 0 and diagonal matrices �, �¿ 0 and �¿ 0 such that[CT�C CT(�D + 1
2 �)
(DT�+ 12 �)C �+ DT�D + 1
2(�D + DT�)
]+
[ATP + PA PB
BTP 0
]¡ 0: (3.2a)
[2� ��
�� 2�
]¿ 0; (3.2b)
then system (2:1) is globally asymptotically stable.
Let us now consider the following uncertain system described by state-space models of the form:
x = (A+OA)x + B’(z); z = Cx + D’(z); (3.3)
where OA stands for the parameter uncertainties which are norm-bounded and of the form
OA= HFE (3.4)
and H ∈Rn×i, E ∈Ri×m are known constant matrices and F ∈Ri×i is an unknown matrix function satisfying
FTF6 !2I (3.5)
with !¿ 0 a given constant. From the de?nition of � in Lemma 2.1 we know �6 %I , where %¡ 1. In thefollowing sections, we assume that the system is controllable and observable for all admissible uncertainties.Then we have the following result:

94 Y. Yang et al. / Systems & Control Letters 53 (2004) 89–105
Theorem 3.2. There exist diagonal matrices �¿ 0; �¿ 0 and � such that (3:2) holds for the uncertain system(3:3) satisfying (3:4) if and only if there exists a scaling parameter "¿ 0 such that (3:2) holds with
�=
[� 0
0 aI
]; � =
[� 0
0 cI
]; �=
[� 0
0 dI
](3.6)
for the system
x = Ax + B’(z); z = Cx + D’(z); (3.7)
where
A= A+!√a+ 1
HE; B=[B
!√(a+ 1)"
H];
C =
[C
√"E
]; D =
[D 0
0 bI
]
and a; b; c; d satisfying
a¿ 0; c2¿4(1 + a)1− %2 ;
b=−c + 22a; d=
b(2− c)− 22
: (3.8)
Proof. Eq. (3.2) holds for system (3.7) if there exists a positive de?nite solution P = PT¿ 0 to the linearmatrix inequality[
CT�C CT(�D + 12 �)
(DT�+ 12 �)C �+ DT�D + 1
2 He(�D)
]+
[ATP + PA PB
BTP 0
]¡ 0 (3.9)
with [2� ��
�� 2�
]¿ 0: (3.10)
Substituting A; B; C; D; �; �; � into (3.9) leads toCT�C + a"ETE +HeP6ft
(A+ !√
a+1HE)PB+ CT(�D + 1
2 �)!√
(a+1)"PH +
(ab+ c
2
)√"ET
BTP + (DT�+ 12 �)C �+ DT�D + 1
2 He(�D) 0
!√(a+1)"
HTP +(ab+ c
2
)√"E 0 (d+ ab2 + bc)I
¡ 0
(3.11)
From (3.8) we have
ab+c2=−1; d+ ab2 + bc =−1

Y. Yang et al. / Systems & Control Letters 53 (2004) 89–105 95
then (3.11) becomes
CT�C + a"ETE +HeP
(A+ !√
a+1HE)
PB+ CT(�D + 12 �)
!√(a+1)"
PH − √"ET
BTP + (DT�+ 12 �)C �+ DT�D + 1
2 He(�D) 0
!√(a+1)"
HTP − √"E 0 −I
¡ 0:
Using Schur Complement, the above inequality is equivalent toCT�C + ATP + PA+ !2
(a+ 1)"PHHTP + (a+ 1)"ETE PB+ CT(�D + 1
2 �)
BTP + (DT�+ 12 �)C �+ DT�D + 1
2 He(�D)
¡ 0: (3.12)
By Lemma 2.3, (3.12) holds if and only if for any F satisfying (3.5)[CT�C CT(�D + 1
2 �)
(DT�+ 12 �)C �+ DT�D + 1
2 He(�D)
]+
[He(A+ HFE)TP PB
BTP 0
]¡ 0:
As for (3.10), we can verify by straightforward manipulations that
[2� ��
�� 2�
]¿ 0
is equivalent to[2� ��
�� 2�
]¿ 0
by noting that (3.8) implies
4ad¿%2c2:
Thus completes the proof.
Corollary 3.2. The uncertain system (3:3) is globally asymptotically stable by Lemma 2:1 if and only ifthere exists a scaling parameter "¿ 0 such that the condition in Corollary 3:1 is satis<ed for uncertaintyfree system (3:7) with the diagonal matrices of the form (3:6).
Remark 3.2. The above corollary show that the global asymptotical stability of the uncertain system (3.3)with the parameter uncertainty form (3.4) can be discussed by that of an uncertainty free system. This resultwill also play a crucial role in solving the robust synthesis problem in this paper.

96 Y. Yang et al. / Systems & Control Letters 53 (2004) 89–105
Next we consider the uncertain system described by
x = (A+OA)x + (B+OB)’(z); z = Cx + D’(z); (3.13)
where OA and OB have the form of
[OA OB] = HF[E1 E2] (3.14)
and H ∈Rn×i, E1 ∈Rj×n, E2 ∈Rj×m are known constant matrices and F ∈Ri×j is an unknown matrix functionsatisfying
FTF6 !2I
with !¿ 0 a given constant. Then we have the following result:
Theorem 3.3. Suppose there exist P = PT¿ 0, diagonal matrices �; �¿ 0; �¿ 0 and a positive number"¿ 0 such that the following linear matrix inequalities hold:
CT�C + ATP + PA PB+ CT(�D + 12 �) PH "!ET1
BTP + (DT�+ 12 �)C �+ DT�D + 1
2(�D + DT�) 0 "!ET2
HTP 0 −"I 0
"!E1 "!E2 0 −"I
¡ 0; (3.15a)
[2� ��
�� 2�
]¿ 0; (3.15b)
then system (3:13) is globally asymptotically stable.
Proof. By Corollary 3.1, system (3:13) is globally asymptotically stable if there exist P¿ 0 and diagonalmatrices �; �¿ 0; �¿ 0 such that[
CT�C CT(�D + 12 �)
(DT�+ 12 �)C �+ DT�D + 1
2(�D + DT�)
]
+
[(A+ HFE1)TP + P(A+ HFE1) P(B+ HFE2)
(B+ HFE2)TP 0
]¡ 0 (3.16)
and (3.15b) holds. Denote
M =
[CT�C + ATP + PA PB+ CT(�D + 1
2 �)
BTP + (DT�+ 12 �)C �+ DT�D + 1
2(�D + DT�)
];
then (3.16) can be written in the form of
M +He
([PH
0
]F[E1 E2]
)¡ 0:

Y. Yang et al. / Systems & Control Letters 53 (2004) 89–105 97
According to Lemma 2.3, the above inequality holds if and only if there exists a positive number "¿ 0such that
M + "!2[ET1
ET2
][E1 E2] +
1"
[PH
0
][HTP 0]¡ 0
it can be easily proved that the above inequality is equivalent to (3.15a).
Remark 3.3. The above result show that assessing global asymptotic stability of the uncertain system (3.13)satisfying (3.14) can be carried out by solving two LMIs which is essentially a convex optimization problemand numerically e5cient.
From the above results, we can also derive the following global asymptotic stability conditions based onthe determination of the largest allowable magnitude of the admissible uncertainty which will not destabilizethe system. The signi?cance of this result is that it provides a basis to evaluate the quality of the design andpresents an e5cient way to access the robustness of a feedback system in engineering practice.
Corollary 3.3. The uncertain system (3:13) with respect to (3:14) for FTF6−*I is globally asymptoticallystable, where * is the global minimum of the following generalized eigenvalue minimization problem withrespect to P = PT¿ 0 and diagonal matrices �¿ 0, �¿ 0, � and a positive number "¿ 0:
min *
s:t:
[T1 − *"TT3 T3 T2
TT2 −"I
]¡ 0;
[2� ��
�� 2�
]¿ 0;
T1 =
[CT�C + ATP + PA PB+ CT(�D + 1
2 �)
BTP + (DT�+ 12 �)C �+ DT�D + 1
2(�D + DT�)
];
T2 =
[PH
0
];
T3 = [E1 E2]: (3.17)
4. Robust synthesis
In this section, we consider the robust synthesis problem for uncertain systems. It is concerned with de-signing a feedback controller such that the resulting closed-loop system is globally asymptotically stable forall admissible uncertainties.Let us ?rst consider the uncertain system of the form
x = (A+OA)x + B1++ (B2 + OB)u;
z = Cx + D11++ D12u;
y = x;
+= ’(z); (4.1)

98 Y. Yang et al. / Systems & Control Letters 53 (2004) 89–105
where x∈Rn is the state, u∈Rp is the control input, +∈Rm is the nonlinear input, z ∈Rm is the controlledoutput and ’(·) : Rm → Rm is a vector-valued nonlinear mapping. OA and OB represent the parameteruncertainty which belongs to certain bounded compact set. First, we will show that if there exists a dynamicoutput feedback controller such that system (4.1) is globally asymptotically stable according to Lemma 2.1,there also exists a static state feedback controller to realize the same purpose.
Theorem 4.1. For uncertain system (4:1) satisfying (3:14), if there exists a dynamic output feedback con-troller K(s) such that the resulting closed-loop system is globally asymptotically stable by Lemma 2:1 forall admissible uncertainties, there must exists a static state feedback controller that achieves the same resultas well. Furthermore, if the dynamic output feedback controller is
xk = Akxk + Bky; u= Ckxk + Dky (4.2)
and P is the positive de<nite solution to (3:2) corresponding to the closed-loop system of (4:1) with (4:2),denote
Q = P−1 =
[Q11 Q12
QT12 Q22
];
then the state feedback controller is
K = Dk + CkQT12Q−111 :
Proof. Denote A= A+OA and B= B+OB. The closed-loop system of (4.1) with (4.2) is
xc = Axc + B+; z = Cxc + D11+; (4.3)
where xc = [xT xTk ]T and
A=
[A+ BDk BCk
Bk Ak
]; B=
[B1
0
]; C = [C + D12Dk D12Ck ]:
According to Corollary 3.1, system (4.3) is globally asymptotically stable if there exist a positive de?nitematrix P¿ 0 and diagonal matrices �; �¿ 0; �¿ 0 such that[
CT�C + ATP + PA PB+ CT(�D11 + 12 �)
BTP + (DT11�+12 �)C �+ DT11�D11 +
12 (�D11 + D
T11�)
]¡ 0; (4.4a)
[2� ��
�� 2�
]¿ 0: (4.4b)
Multiplying diag(P−1; I) on the left- and right-hand side of (4.4a) we get[QCT�CQ + QAT + AQ B+ QCT(�D11 + 1
2 �)
BT + (DT11�+12 �)CQ �+ DT11�D11 +
12 (�D11 + D
T11�)
]¡ 0:

Y. Yang et al. / Systems & Control Letters 53 (2004) 89–105 99
Substituting Q; A; B; C into the above inequality we have
[Q11(C+D12Dk)
T+Q12CTk DT12]�[(C+D12Dk)Q11 +D12CkQ
T12] ∗ [Q11(C+D12Dk)
T+Q12CTk DT12](�D11 +
12 �)
∗ ∗ ∗(DT11� +
12 �)[(C + D12Dk)Q11 + D12CkQ
T12] ∗ � + DT11�D11 +
12 (�D11 + D
T11�)
+
Q11(A + BDk)
T + Q12CTk BT + (A + BDk)Q11 + BCkQ12 ∗ B1
∗ ∗ ∗BT1 ∗ 0
¡ 0;
where ∗ is the matrix that need not to be written out. Note that the above inequality guarantees [Q11(C + D12Dk)T + Q12CTk DT12]�[(C + D12Dk)Q11 + D12CkQT12] [Q11(C + D12Dk)
T + Q12CTk DT12](�D11 +
12 �)
(DT11� +12 �)[(C + D12Dk)Q11 + D12CkQ
T12] � + DT11�D11 +
12 (�D11 + D
T11�)
+
[Q11(A + BDk)
T + Q12CTk BT + (A + BDk)Q11 + BCkQ12 B1
BT1 0
]¡ 0:
Multiplying diag(Q−111 ; I) on the left- and right-hand side of the above inequality leads to
[(C + D12Dk)T + Q−111 Q12C
Tk D
T12]�[(C + D12Dk) + D12CkQ
T12Q
−111 ] [(C + D12Dk)
T + Q−111 Q12C
Tk D
T12](�D11 +
12 �)
(DT11� +12 �)[(C + D12Dk) + D12CkQ
T12Q
−111 ] � + DT11�D11 +
12 (�D11 + D
T11�)
+
(A + BDk)TQ−1
11 + Q−111 Q12C
Tk B
TQ−111 + Q−1
11 (A + BDk) + Q−111 BCkQ12Q
−111 Q−1
11 B1
BT1Q−111 0
¡ 0:
Denote Y = Q−111 we have[
(C + D12K)T�(C + D12K) (C + D12K)T(�D11 + 12 �)
(DT11�+12 �)(C + D12K) �+ D
T11�D11 +
12 (�D11 + D
T11�)
]+
[(A+ BK)TY + Y (A+ BK) YB1
BT1Y 0
]¡ 0:
Note that the above inequality with (4.4b) guarantees global asymptotical stability for the closed-loop systemcorresponding to the system (4.1) with the state feedback u= Kx
x = (A+ BK)x + B1+; z = (C + D12K)x + D11+:
Thus completes the theorem.
In view of Theorem 4.1, we develop the following conditions for the existence of a static state feedbackK such that system (4.1) satisfying (3.14) is globally asymptotically stable.
Theorem 4.2. Consider the uncertain system (4:1) satisfying (3:14), then there exists a state feedback con-troller u = Kx such that the resulting closed-loop system is globally asymptotically stable for alladmissible uncertainties, if and only if for some "¿ 0 this controller achieves the same property for the

100 Y. Yang et al. / Systems & Control Letters 53 (2004) 89–105
scaled system
x = Ax + B1++ B2u;
z = Cx + D11++ D12u;
y = x;
+= ’(z); (4.5)
where
A= A+!√a+ 1
HE1; B1 =[B1
!√(a+ 1)"
H]; B2 = B2 +
!√(a+ 1)"
HE2;
C =
[C
√"E1
]; D11 =
[D11 0
0 bI
]; D12 =
[D12
√"E2
](4.6)
with the diagonal matrices such that (3:2) holds for the closed-loop system having the forms of
�=
[� 0
0 aI
]; � =
[� 0
0 cI
]; �=
[� 0
0 dI
];
where a; b; c; d satisfying (3:8).
Proof. Let xc = [xT xk ]T, the closed-loop system (4.1) with the state feedback u = Kx can be described bythe following state-space equations
xc = ( SA+ HF SE)xc + B1+; z = SCxc + D11+; (4.7)
where
SA= A+ B2K; SE = E1 + E2K; SC = C + D12K
and the closed-loop system of (4.5) with the state feedback u= Kx has the form of
xc =(SA+
!√a+ 1
H SE)xc + B1+;
z =
[SC
√" SE
]xc + D11+;
where SA; SE; SC are as in (4.7). Then the desired result can be get immediately from Theorem 3.2

Y. Yang et al. / Systems & Control Letters 53 (2004) 89–105 101
In the following, we will consider the output feedback controller synthesizing to achieve global asymptoticstability for uncertain system:
x = (A+OA)x + B1++ (B2 + OB)u;
z = C1x + D11++ D12u;
y = C2x + D21+; (4.8)
where OA;OB satisfying (3.14).
Theorem 4.3. There exists a linear dynamic output feedback controller K(s) such that the resulting closed-loopsystem is globally asymptotically stable by Lemma 2:1 for all admissible uncertainties, if and only if forsome "¿ 0 this controller achieve the same property for the following scaled system:
x = Ax + B1++ B2u;
z = C1x + D11++ D12u;
y = C2x + [D21 0]+; (4.9)
where matrices A; B1; B2; C1; D11; D12 are given in (4:6) and the diagonal matrices such that (3:2) holds forthe closed-loop system have the form of
�=
[� 0
0 aI
]; � =
[� 0
0 cI
]; �=
[� 0
0 dI
];
where a; b; c; d satisfying (3:8).
Proof. Without the loss of generality, we assume that K(s) is strictly proper and has the following state–space realization
xk = Akxk + Bky; u= Ckxk : (4.10)
Let xc =[xT xk ]T, the closed-loop system (4.8) with the controller (4.10) is given by the state-space equations
xc = ( SA+ SHF SE)xc + SB1+; z = SC1xc + D11+: (4.11)
where
SA=
[A B2Ck
BkC2 Ak
]; SH =
[H
0
]; SE = [E1 E2Ck ];
SC1 = [C1 D12Ck ]; SB1 =
[B1
BkD21
]:

102 Y. Yang et al. / Systems & Control Letters 53 (2004) 89–105
While the closed-loop system of (4.9) with the controller (4.10) has the form of
xc =(SA+
!√a+ 1
SH SE)xc +
[SB1
!√(a+ 1)"
SH]+;
z =
[SC1
√" SE
]xc +
[D11 0
0 bI
]+;
where SA; SB1; SH; SE; SC1 are as in (4.11). Then we can get the result from Theorem 3.2.
5. Numerical example
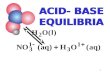
Let us consider an example of concrete systems studied in the theory of phase-locked loops (PLL) andshow how the results derived in this paper can be used to investigate the locking-in phenomenon of PLL withparameter uncertainty. The locking-in of an arbitrary solution to an equilibrium point is just a synonym ofthe global asymptotic stability for PLL, the dynamics of which is described by (2.1). The locking-in propertyis extremely signi?cant for PLL. Many papers and monographs are devoted to it, for example [1,4,19].The block diagram shown in Fig. 1 is close to the actual implementation of a PLL. Then with some
assumptions the model in Fig. 1 can be simpli?ed to the one in Fig. 2 and the voltage-controlled oscillator(VCO) can be considered as an integrator [1]. The model shown in Fig. 2 is rearranged so that all linearcomponents appear in the forward path and the nonlinear component appears in the feedback path as shownin Fig. 3. Both the reference phase signal and the VCO control signal are set to zero in Fig. 3.From Fig. 3, the transfer function from the input sin(·) to the output −1 is
G(s) =1sK(s);
where K(s) is the transfer function from sin(·) to −1 and described by state–space model of the form
x =
[−63 −2032 0
]x +
[8
0
]+;
1= [2 − 2]x − 0:5+;
+= sin1: (5.1)
System (5.1) describes the dynamics of an autonomous phase-locked loop with a second-order ?lter of type“2/2” [10] and a 23-periodic input nonlinearity. Now, we suppose that the state and input matrices of system(5.1) are subject to norm-bounded parameter uncertainty of the form (3.14) with FTF6 I and the weightingfunctions are given as
H =
[1 0
0 1
]; E1 =
[1 0
0 −1
]; E2 =
[1
1
]:
Solving the linear matrix inequalities in Theorem 3.3 by using LMI Toolbox [3], we get
P =
[944:4 531:4
531:4 1946:6
]; �= 1165:8;
�= 101:7725; � = 7100:3; "= 301:5821:

Y. Yang et al. / Systems & Control Letters 53 (2004) 89–105 103
Low-PassFilter
VCO
sin(ω1t +θ)
control voltage
cos(ω2t + φ)
Fig. 1. Phase-locked loop.
sin(·) Low-PassFilter
Kv/s
θ
γφ
Fig. 2. Model of Phase-locked loop.
GFilt(s) Kv /s
G(s)
sin(·)
φ
Fig. 3. Rearrangement into a linear component with a feedback nonlinear component.
Thus the system (5.1) satisfying (3.14) is globally asymptotically stable for all admissible uncertainty, i.e. thePLL achieves robust locking-in property. Solve the generalized eigenvalue problem corresponding to (3.17),we get the largest allowable uncertainty bound for system (5.1) is
*=−1:5666:From Corollary 3.3, this result guarantees that the uncertain pendulum-like system (5.1) with (3.14) willbe robustly stale for ∀F; FTF6 1:5666I . This estimation can be veri?ed by Fig. 4 where the numericalexperiment results of system (5.1) with 20 randomly generated initial value x0; 10 and F(‖F‖= 1:2516) aregiven. The result presented in Fig. 4 where all of xi converge to 0 and 1 converges to 2k3 shows that thesystems perturbed by those F are all global asymptotically stable. This observation coincides with Theorem3.3 and Corollary 3.3 and con?rms the robust stability of system (5.1).
6. Conclusion
In this paper, robust analysis and synthesis results guaranteeing the global asymptotic stability for a classof uncertain nonlinear systems with multiple equilibria have been presented. Using the Kalman–Yakubovich–Popov lemma in terms of linear matrix inequality as the analytical framework, early work performed by Leonovet al for nominal systems is extended to take account of system uncertainties and derive feedback controllaw to ensure stability for robust case. A concrete example of phase-locked loop illustrates the e5ciency ofthe proposed approach. Under this LMI-based framework, other global asymptotic properties of systems with

104 Y. Yang et al. / Systems & Control Letters 53 (2004) 89–105
0 1 2 3 4 5 6 7 8 9 10-8
-6
-4
-2
0
2
4
6
8Simulation Results
Time(s)
x an
d φ
x1
x2
φ
Fig. 4. Simulation for ‖F‖ = 1:2516.
multiple equilibria can be investigated as well as synthesizing corresponding feedback controller to ensurethose properties. These will be the subjects of further study.
References
[1] D.Y. Abramovitch, Lyapunov redesign of analog phase-lock loops, IEEE Trans. Comm. 38 (12) (1990) 2197–2202.[2] C. Corduneanu, Integral Equations and Stability of Feedback Systems, Academic Press, New York, 1973.[3] P. Gahinet, A. Nemirovski, A.J. Laub, M. Chilali, LMI Control Toolbox User’s Guide, 1st Edition, The MathWorks, 24 Prime Park
Way, Natick, MA 01760-1500, 1995.[4] F.M. Gardner, Phaselock Techniques, Wiley, New York, 1979.[5] A.K. Gelig, G.A. Leonov, V.A. Yakubovich, The Stability of Nonlinear Systems with Nonunique Equilibrium, Nauka, Moscow,
1978 (in Russian).[6] K. Gu, H∞ control of systems under norm bounded uncertainties in all system matrices, IEEE Trans. Automat. Control 39 (6)
(1994) 1320–1322.[7] W.M. Haddad, V. Kapila, Fixed-architecture controller synthesis for systems with input–output time-varying nonlinearities, Int.
J. Robust Nonlinear Control 7 (7) (1997) 675–710.[8] G.A. Leonov, I.M. Burkin, A.L. Shepeljavyi, Frequency Methods in Oscillation Theory, Kluwer Academic Publishers, Dordrecht,
1992.[9] G.A. Leonov, A. Noack, V. Reitmann, Asymptotic orbital stability conditions for Wows by estimates of singular values of the
linearization, Nonlinear Anal. 44 (8) (2001) 1057–1085.[10] G.A. Leonov, D.V. Ponomarenko, V.B. Smirnova, Frequency-Domain Methods for Nonlinear Analysis, World Scienti?c, Singapore,
1996.[11] G.A. Leonov, V.B. Smirnova, Stability and oscillations of solutions of integro-diDerential equations of pendulum-like systems, Math.
Nachr. 177 (1996) 157–181.[12] J. Moser, On nonoscillating networks, Quart. Appl. Math. 25 (1967) 1–9.[13] K.S. Narendra, J.H. Taylor, Frequency Domain Criteria for Absolute Stability, Academic Press, New York, 1973.

Y. Yang et al. / Systems & Control Letters 53 (2004) 89–105 105
[14] V. Popov, Absolute stability of non-linear systems of automatic control, Automation Remote Control 22 (1961) 857–875.[15] A. Rantzer, On the Kalman–Yakubovich–Popov lemma, Systems Control Lett. 28 (1) (1996) 7–10.[16] V. Rasvan, Dynamical systems with several equilibria and natural Liapunov functions, Arch. Math. 34 (1998) 207–215.[17] J.A.K. Suykens, J. Vandewalle, B.D. Moor, An absolute stability criterion for the Lur’e problem with sector and slope restricted
nonlinearities, IEEE Trans. Circuits Systems I 45 (9) (1998) 1007–1009.[18] M. Vidyasagar, Nonlinear System Analysis, Prentice-Hall, Englewood CliDs, NJ, 1993.[19] N.E. Wu, Analog phaselock loop design using Popov criterion, in: Proceedings of the American Control Conference, 2002,
pp. 16–18.[20] L. Xie, Y.C. Soh, Positive real control problem for uncertain linear time-invariant systems, Systems Control Lett. 24 (4) (1999)
265–271.[21] Y. Yang, L. Huang, H∞ controller synthesis for pendulum-like systems, Systems Control Lett. 50 (4) (2003) 263–276.





![Robust control of uncertain nonlinear systems: a nonlinear ... · worst uncertainties [4, 5]. Such a design philosophy involving in most of the existing robust control design methodologies](https://img.pdfslide.us/doc/110x75/5b0468087f8b9aba168d3ae5/robust-control-of-uncertain-nonlinear-systems-a-nonlinear-uncertainties-4.jpg)