Embed Size (px)
Citation preview

Robotics: Science and Systems (R:SS)
Course Assignment 1
Dr. Zhibin Li, c©University of Edinburgh
16 Oct 2019 (homework handout)
1 System identification, Signal filtering and state estimation(7%)
1.1 (1%)
Explain the following questions:
• For the mobile turtlebot, what are the physical principles you can use for modelling itsmovement?
• Based on the physical principles, drive the model such that it can be programmed.
1.2 (1%)
Explain the following questions:
• What are the cases in robotics that signal filtering is needed?
• What are the filters you would possibly need for your RSS lab practical? And why?
1.3 (1%)
Inside the warehouse bin-picking area, a scenario of measuring the position of a robot actuatoris needed. The robot joints are following periodic trajectories for this repetitive task (similar toa sinusoidal signal A sin(ωt)), and there are random Gaussian noises mixed in the measurement.(Note: A is the magnitude of the sinusoidal wave; the unit of ω is rad/s, and 2πf=ω.)
Explain:
• Propose a solution to obtain cleaner position measurement?
• What are the design principles for your solution, eg, what are the parameters involved?
1.4 (4%)
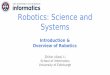
The model of a car suspension is given in Fig. 1. The mass m is known and we can obtain themeasurements of vertical position z with high accuracy. The task is to identify the real stiffnessk and viscous damping c.
Perform the following tasks:
• Is the measurement of vertical position z enough for identifying the real stiffness k andviscous damping c? Give your reasons.
• Formulate the dynamical equation of the system using m, k and c.
• Formulate the identification problem expressed by k and c, explain how to use the datain the formula, and provide a technical solution to solve estimation of k and c.
1

Figure 1: Modelling a car suspension system by a mass-spring-damper model.
2 Localization (3%)
Figure 2: Atlas robot performing parkour (Image copyright: Boston Dynamics Inc.).
Assume you are a robotic scientist in Boston Dynamics who is designing an experiment fordynamic manoeuvre of Atlas robot. The robot needs to autonomously detect its spatial positionwith respect to the environment in order to compute where and when to step, leap and thrust.The setup of platforms and obstacles (model parameters are available) and indoor map are allknown, and unique QR code markers are placed at different places as features that allow fastand real-time vision process.
Now, your task is to design a localization algorithm for this experiment, and here are thetasks assigned to you.
2.1 (1%)
Propose a suitable algorithm for fast and real-time localization in this particular case (Fig. 2),and explain why you do so.
2.2 (1%)
Write down the pseudo code of your proposed algorithm, explain the major steps, and pointout what the key component(s) is/are.
2.3 (1%)
Your preliminary trials find out that to perform the experiment successfully, the foot placement(where the robot places its foot) accuracy needs to be smaller than 5 cm, ie at least 4 cm inorder not to get tripped. Now, you conclude the design principle that robot foot placementaccuracy needs to have 4 cm standard deviation. So, you need to inform other engineers aboutthe specification of their modules, explain: 1. what aspects should be considered regardinguncertainties and errors; 2. give reasons about key factors that determine the final accuracy ofthe foot placement.
2