Upload
satyavanhange
View
218
Download
0
Embed Size (px)
Citation preview
8/8/2019 Robotics Good One
1/50
Strategic Research Agenda
May 2006
8/8/2019 Robotics Good One
2/50EUROP Executive Board Committee - I
EUROP EXECUTIVE BOARDCOMMITTEE
Sagem Dfense Scurit
Philips
Finmeccanica
KUKA
R U Robots
8/8/2019 Robotics Good One
3/50
texte
8/8/2019 Robotics Good One
4/50
8/8/2019 Robotics Good One
5/50
8/8/2019 Robotics Good One
6/50Contents - I
CONTENTS
INTRODUCTION................................................................................................................ 1 EXECUTIVE SUMMARY ................................................................................................... 4
Vision and challenges ............................................................................................................................... 4
Vision ................................................................................................................................................... 4
Challenges ........................................................................................................................................... 5
EUROP benefits Europe ......................................................................................................................... 10
EUROP SRA METHODOLOGY ...................................................................................... 11 APPLICATIONS DRIVING RESEARCH ......................................................................... 12
Product scenarios.................................................................................................................................... 12
Industrial segment .............................................................................................................................. 12
Professional service segment ............................................................................................................ 15
Domestic service ................................................................................................................................ 18
Security segment ............................................................................................................................... 20Space segment .................................................................................................................................. 22
Breakthrough requirements..................................................................................................................... 24
TECHNOLOGY CHALLENGES COMMON TO MARKET SEGMENTS......................... 25Robotics System ..................................................................................................................................... 25
Manipulation and grasping ................................................................................................................. 26
Sensing and control ........................................................................................................................... 26
Intelligent and distributed environment .............................................................................................. 26
Dependability ..................................................................................................................................... 27
Real Time Control .............................................................................................................................. 28
Components and miniaturised robotics ................................................................................................... 29
Actuators ............................................................................................................................................ 30
Sensors .............................................................................................................................................. 31
Processing and Communications....................................................................................................... 31
Human-Machine Interfaces ................................................................................................................ 32
Advanced behaviours.............................................................................................................................. 33
Cognitive ............................................................................................................................................ 33
Autonomy ........................................................................................................................................... 34
Collective Behaviours......................................................................................................................... 34
Human machine interaction ............................................................................................................... 35
Data Fusion........................................................................................................................................ 35
Rich Sensory Motor Skills .................................................................................................................. 35
MAKING IT HAPPEN ...................................................................................................... 37
8/8/2019 Robotics Good One
7/50
8/8/2019 Robotics Good One
8/50Introduction - 1
INTRODUCTION
Robotics is a technology at the cusp. Long acceptedby industry for improving factory quality, performanceand efficiency, robotics has for at least three decadesbeen a key technology in engineering industries forincreasing industrial productivity and for competitivemanufacturing. Robotics is now at a point where its
scope is dramatically expanding. 21st
century robotmachines will be used in all areas of modern life in theform of surgical devices, machines to explore spaceand conduct hazardous tasks on earth, robot assis-tants in the home or work place and the most excitingtoys and entertainment devices child-kind has everseen!
The major challenges for the 21st century are:
To develop robotic systems that can sense and in-teract with the human world in useful ways.
To design robotic systems able to perform com-plex tasks with a high degree of autonomy.
This will result in robot technologies being embeddedin literally thousands of future products, each onehaving huge commercial potential.
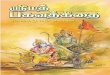
Such future robot systems will affect a broad range ofsocial and economic activities. They will transform ev-eryday life as well as industrial processes resulting ina step change of similar impact as internet, mobilephones and laptops technologies have shown at theend of the 20th century. They will enable new kinds ofindustrial automation; add performance and function-ality to future machines; provide a wide range of inno-vative products, applications and services; andperform complex security and space missions. Theywill be driven by social aspirations and bring econom-ic benefits, impacting on a wide range of peopleslives and core issues of our European society. Theworld-wide market for such future robot systems isforecast by United Nations Economic Commission forEurope (UNECE) and the International Federation ofRobotics (IFR) to be in excess of 55 billion per an-num by 2025.
Source: Japanese Robotics Association
R&D initiatives in this field will strongly contribute tothe creation of new opportunities towards Europeanemployment and growth. These opportunities areeven more pronounced when facing socio-economicfactors such as the ageing of our society, increasingEuropes competitiveness or the need to develop aknowledge-based society as formulated in the LisbonStrategy and reinforced by its follow-up review (the"Kok Report"). Robotics can address sustainable per-spectives for all of these factors.
In order to reach this vision, a European TechnologyPlatform in Robotics - EUROP (European RoboticsPlatform) and a Strategic Research Agenda are pro-posed. The ambition of EUROP is to unite all the mainEuropean industrial and academic robotics stake-holders and public authorities around the EUROP Vi-sion, where industrially relevant research goals,priorities and action plans on strategically importantissues can be agreed and relevant actions imple-mented.
Europe has a strong and competitive robotics sector.
Moreover, dual use opportunities presented by an im-proved co-ordination between European civil R&D ef-forts and similar efforts with defence-related R&Dcould also pave the way for an accelerated develop-
$0
$10 000 000
$20 000 000
$30 000 000
$40 000 000
$50 000 000
$60 000 000
$70 000 000
$80 000 000
$90 000 000
$100 000 000
1995 2000 2005 2010 2015 2020 2025
Year
Market Size ($1000)
Security and Space
Personal and Service
Medical and Bio-industrial
Manufacturing
8/8/2019 Robotics Good One
9/502 - Introduction
ment of generic underpinning robotic technologiesand integrated robotic systems. So far though, it isoutside of Europe that large robotics R&D initiativeshave been set up to address similar opportunities andsocio-economic challenges. This is particularly true ofKorea, Japan and the USA, where efforts are under-
way to build new robotics industries and to preparemarkets for robotic products.
This is further illustrated by Table 1, which comparesthe level of activity in robotic R&D and the level of keyrobotic products in USA, Japan, Korea, and Europe.This study emphasises the fact that key industrial or-ganisations in Japan and Korea are highly active inrobotics R&D. In the United States, the robotics R&Dis very strong in university research labs but not yettaken up widely in industry except in the defencearea. By comparison, European R&D activity is fairlyhomogeneous between the different types of organi-
sation.
Table 1 - Robotics comparison chart
Source: International Assessment of Research and Development
in Robotics, WTEC Panel report January 2006
This survey is given as an informative overview. Inparticular, regarding the industrial robotics in manu-facturing, Europes position is actually much closer toJapans position. In Japan the emphasis has been on
robots that have a structure that is similar to humans- so called "Humanoids". In Korea the 10-year nation-al programme that has been launched to gain leader-ship in both industrial and service robotics isgenerously sponsored and it could lead to a signifi-
cant reliance on Korean technology for service and in-dustrial applications as major companies such asSamsung, LGe, and KIA are backing this effort. It isessential that Europe matches or beats this commit-ment.
Table 2 - Robotic products comparison chart
Source: International Assessment of Research and Development
in Robotics, WTEC Panel report January 2006
Europe has a very strong base in robotics both froman industrial and research point of view (Table 2).Furthermore, for several years now, many EuropeanMember States, ESA and the EU Research Frame-work Programmes have supported world-class robot-ics research. On one hand, an improved co-ordination
between European civil RTD efforts and, on the otherhand, the dual use opportunities presented by an im-proved co-ordination between European civil RTD ef-forts and similar efforts with defence-related RTD canalso pave the way for an accelerated development ofgeneric underpinning robotic technologies and inte-grated robotic systems.
EU research activities on a stronger robotics platformcan serve as an ideal means to support the strategiesand targets set out at the European Councils ofLisbon 2000, Gothenburg 2001 and Barcelona 2002,
in terms of moving towards a knowledge-based econ-omy and society, sustainable development andreaching the 3% target of EUs GDP on R&D.
Organisations
in robotics R&D
Degree or level of activity
USA Japan Korea Europe
Basic, University
based research
Excellent Good Good Good
Applied, industry-
based research
(corporate, national
labs)
Fair Excellent Very good Very good
National or multi-
national research
initiatives or
programmes
Fair Excellent Excellent Very good
University-industry-
government
parthnerships;
entrepreneurship
Fair Excellent Excellent Very good
Key roboticproducts
Degree or level of activity
USA Japan Korea Europe
Robotic vehicles;
military and civilian
Very good Fair Fair Fair
Space robotics Good Fair Not
applicable
Good
Humanoids Fair Excellent Very good Fair
Industrial robotics;
manufacturin
Fair Excellent Fair Very good
Service robotics;
non-manufacturing
Good Good Very good Good
Personal robotics:
home
Fair Excellent Very good Fair
Biological and
biomedical
applications
Very good Fair Fair Very good
8/8/2019 Robotics Good One
10/50Introduction - 3
This ambitious mission, if successful, will see Europemaintaining its leading position in robotics and devel-op new companies and supply networks to meet thenew societal and technology needs while also sup-porting the Lisbon objectives.
In Europe, there exists today a wide consensusamong industrial and academic robotics stakeholderson the future challenges regarding robotics researchand on the economic opportunities. This consensus issupported by a solid statistical framework, White Pa-
pers and roadmaps. The Strategic Research Agendaprovides a clear picture of common core technologiesin Advanced Robotics that cross the different marketsegments. It is of strategic economic importance thatEurope exploits its current strengths and builds an ef-fective European robotics industry. The SRA laid out
in the following pages synthesises a wide consensusof expertise and provides the basis of a means toachieve this goal.
8/8/2019 Robotics Good One
11/50
8/8/2019 Robotics Good One
12/50Executive summary - 5
call upon a distributed knowledge base, co-ordinatetheir activities with other ICT devices and systemsand become the agents of physical action for deliver-ing (either individually or collectively as a group) novelcapabilities, applications and services, resulting in theactive home, office and public environment.
These are the factors that have motivated the visionof future European Robotics and the action that willbring it about. Such a vision of a thriving knowledgebased industry will only result from proactive joint ef-fort.
ChallengesConsidering the extensive investment by Korea andJapan, Europe faces the challenge to stay at the fore-front of robotics development, production and use.
This calls for a set of co-ordinated actions involving allstakeholder groups, in particular from technology,systems and market developers.
Technological ChallengesFunctionalities and performance of robots depend ona vast spectrum of technologies. Today such technol-ogies and components are converging and sharedthroughout the robotics market segments covering in-dustrial, domestic service, professional service andsecurity and space applications.
Three domains of robotics technology have beendefined containing several technology axes. Thesedomains are:
Robotics system.
Components and miniaturised robotics.
Advanced behaviours.
The main technological challenges are described inthe rest of this section for each technology axis of thethree robotics technology domains.
Robotics System
Manipulation and graspingVery flexible and dextrous arms and end effectorsare required with a payload/weight ratios of 1:1 orbetter.
Sensing and controlFor everyday situations there is a need to acquirea sufficient understanding of the environment, tobe aware of situations, to detect objects and peo-ple and to monitor processes with a minimum of in-struction and with high-quality and precision.These requirements call for more advanced sen-sory feedback and use of such information for con-trol.
Intelligent, distributed environmentsWhether in manufacturing, public or home envi-ronments robots will be embedded into ICT net-works in order to become the agents of physicalaction, for delivering, individually or collectively asa group, new capabilities, applications andservices.
Real time control and physical actuationNew systems will require forms of control beyondtraditional open/closed loop control paradigms.
Robotic system engineering
These issues span a range of high level designtopics from addressing specific aspects such asenergy (as for example, energy reduction by re-considering the overall design, the integration ofnew types of fuel cells for enabling long-term robotoperation), traction and propulsion systems andcommunication systems; to design methods andtools for modular autonomous platforms and un-derlying standardisation issues; to specific systemintegration issues and to the development of net-work-centric systems.
8/8/2019 Robotics Good One
13/506 - Executive summary
For future robots operating in everyday environ-ments, dependability will be a crucial design pa-rameter. This includes robot safety as well asoperating robustness, particularly the systemsavailability, security, reliability, and maintainabilityin everyday operating scenarios. Design for de-
pendability will be a major challenge affecting anyaspect of R&D from architectures to key compo-nent functionality and design.
The higher demand for integration of different andmore complex systems into complete production/ambient environment systems will increasingly callfor methods to design, model and deploy highlycomplex systems and for new methods in systemsengineering. It will require the design of new soft-ware methods both in terms of basic software en-gineering methodologies, programming &specification methods, and embedded control sys-
tems. To achieve maximum effectiveness in thedesign process, a common plugand playarchitec-ture is required which itself should draw upon stan-dardisation initiatives such as the impendingRobot Middleware.
Components and miniaturised robotics
ActuatorsThe need for intrinsically safe robot arms, fullyback-drivable high-torque motor systems and grip-pers that accommodate variable object geome-
tries calls for novel, highly integrated actuators.
SensorsA new generation of low-cost sensors is requiredparticularly 3D sensors; tactile sensors and force/torque sensors, offering better resolution with re-duced weight and power consumption.
Processing and communicationsThe spectacular increase in computing and com-munications capability will allow engineers to dis-tribute sensing, control and other cognitive
functions in the robot more easily and to interfacerobots with external network-centric systems.
Human-Machine InterfacesSimultaneous use of several multimodal informa-tion channels such as language, gestures, graph-ics, haptics have to be merged into meaningfuland intuitive inputs for future robot systems thatpurposefully interact with people in an intuitive andnatural way. New input devices including sensorsfor gesture recognition, haptic and tactile deviceshave to be developed.
8/8/2019 Robotics Good One
14/50Executive summary - 7
Miniaturised RoboticsA range of new, very small and highly distributedmicro and nano-robots needs to be developed for
a variety of new application areas. Relevant RTDissues include:
New forms of bio-inspired climbing, walking orflying locomotion.
Energy related aspects.
Programmable micro-/nano- assembly & ma-nipulation systems.
Programming, co-ordination, interaction andcontrol of (a large number of) miniature robotswith micro/nano/bio-components.
Advanced Behaviours
Autonomy
Autonomous and safe behaviour for robots actingin everyday environments and coping with a wideset of tasks in all operational modes constitutes afundamental requirement for tomorrows roboticmachines. These systems should detect unfore-seen situation and recover into a controlled state.
Cognitive skillsThere is a need to endow the systems with highercognitive functions that allows recognition of con-
text, reasoning about actions and a higher degreeof error diagnostics and failure recovery. Suchflexibility can only be achieved through use of ad-vanced cognitive skills and requires elements ofperception, decision making, machine learningand other intelligent systems.
Cognitive skills are also highly relevant to effec-tively and safely use robot systems and thus in-crease user acceptance. Appearance andinteraction of future robot systems may include ex-pressive motions, mimics, emotions, affectivecomputing
Collective behavioursThe collective action of multiple robots with a sin-gle mission will involve co-operative and collabo-
rative actions, and sharing of goals and resources.Arising in network centric systems, collective be-haviours will emerge due to progress in ICT tech-nologies. Systems of systems and systems ofrobots are generalising these concepts.
Rich sensory-motor skillsIn new applications, there is a need for a signifi-cant change in system design to rely on less accu-rate and cheaper mechanical structures that arecomplemented with a rich set of sensory feedbackto provide a performance that is beyond that ofpresent technology. This requires adoption of newcontrol methods and significantly more flexiblesensory systems.
Data fusion/algorithmWith the increasing amount of information anddata from sources internal or external to the robot;the challenge will lie in performing real-time fusionof the information and the design of effective andefficient algorithms for information processing.
Intuitive and flexible interfacingTo equip robots with more intuitive and flexibleuser interfaces in order to allow people to use
them with no or minimum training. In fact, the qual-ity of user-interfaces will, to a large extent, deter-mine the market success of a new generation ofrobots.
Intuitive human machine interactionThe transfer of information and instructions re-garding tasks, skills, objects or environments be-tween human and robot should be as intuitive andefficient as the communication between two peo-ple. Robots should be equipped with user-friendlyinterfaces that require minimal training and that
render the robots socially acceptable. Intuitive andefficient instruction schemes are also critical forco-operating industrial robots.
8/8/2019 Robotics Good One
15/508 - Executive summary
Education and SkillsRobotics is seen as "exciting" for students and is at-tracting them at a moment when many countries areexperiencing a decline in admission to engineeringeducation, due to lack of interest. By definition robot-
ics knowledge must consider the full scope of engi-neering skills from basic mechanical design to controland intelligence so as to provide an acceptable solu-tion. The combination of systems engineering and"excitement" can be utilised as a catalyst to demon-strate how robotics is a confluence of many differentdisciplines. In education it can be used to generate in-terest and at the same time provide a basis for the ed-ucation of a new generation of engineers. Cross-disciplinary research ought to be a component at alllevels of education to ensure European leadershipacross many different sectors.
Today though, robotics skills are often taught in a sec-tarian fashion, i.e. with a focus in mechanical-, electri-cal-, computer-, or systems engineering. Skills arerequired in not only one of the areas of robotics, butacross all. For this, one needs to have a solid interdis-
ciplinary background with additional knowledge in de-sign and in specific applications. It is thus essential todevelop a new generation of engineers and systemsdesigners that have a sufficient broad perspective toundertake the development of the system platformand its integration into applications. The scope of
such education must however not be at the expenseof depth, as the problems to be addressed are funda-mental and difficult. Teamwork will also be a require-ment for the integration of systems. Europe faces thechallenge to stay at the forefront of robotics develop-ment, production and use. This calls for a co-ordinat-ed action involving all stakeholder groups, inparticular from technology, systems and market de-velopers and educators.
Societal and Structural ChallengesThe Lisbon Strategy, committed the EU to establish it-
self as the most dynamic and competitive knowledge-based economy in the world, a strategy that was crit-ically assessed and reinforced by the Kok Commis-sion in 2004. This Commission identified majorsocietal challenges: the greying Europe, the EU en-largement, economic growth, productivity and em-ployment. In addition, the ability to take appropriateprecautions against security threats has become amajor topic of concern for the European citizen.
As already shown in this report, robotics can addresssustainable perspectives for all these challenges. In-dustrial Robotics will be an important enabler to
achieve increased industrial efficiency. The newbranch of service robotics will be crucial for the elderlyand for an increased "quality of life" for everyone. Ad-vanced robots can also help in achieving effective cri-sis management (such as floods, earthquakes, andforest fires), through search and rescue missions. Inaddition, monitoring illegal and clandestine activities,border surveillance and everyday security concernscan benefit from robot systems.
However, the introduction of robotics into new do-mains poses significant challenge. The successful
application of robotics in e.g., the car industry has re-quired a long-term strategic alliance between the carmanufacturers and the robotics industry. To enter intonew markets and build new product lines, there is aneed for integration across traditional industrial
8/8/2019 Robotics Good One
16/50Executive summary - 9
boundaries. Here systems integrators will play a veryimportant role.
At the same time it remains to be seen if the service
robotics segments will become a natural extension ofthe present white-goods industry or if the result will bean entirely new industrial sector. It also remains to be
seen if the civil security robotics industry will emergefrom the migration into civil applications of many largecompanies that are today purely defence-oriented orif the result will be an entirely new industrial segment.Either way, the potential for economic growth will bevery significant.
8/8/2019 Robotics Good One
17/5010 - Executive summary
EUROP benefits EuropeEuropean society stands to benefit greatly from a suc-cessful EUROP strategy. The EUROP strategy willhelp to develop a vibrant and dynamic Advanced Ro-
botics supply chain that will improve competitiveness,boost knowledge-based employment and help inmeeting the key Lisbon objectives. Without a suc-cessful European robotics industry, European citi-zens and industry will be competitively disadvantagedand will be dependent upon foreign imports in a stra-tegically vital technology.
A strong European Advanced Robotics supply net-work will grow to be a strong economic sector with thepotential for strong international earnings. Such asupply network will also allow Europe to be at theleading edge in providing manufacturing and service
industry with high productivity tools and systems,keeping these industries competitive in a world mar-ket and preserving long term job prospects. A Euro-pean based Advanced Robotics industry will also bea key component in converting low-skilled manualjobs to knowledge-based employment.
EUROP will also bring key advantage to existing Eu-ropean industries by providing them with the pool ofskills, techniques and components to incorporate ro-botic and cognitive science technologies into theirproducts, keeping them relevant and competitive for
the approaching age of robotics and ubiquitous com-puting. Without the strong supply network that EU-ROP envisages, these companies will be dependentupon technology primarily being developed to in-crease the viability of their international competitors.
A strong and active European Advanced Roboticssupply network will provide politicians and officialswith more freedom to design policies to meet the keyEuropean social challenges without being reliant ontechnology and standards developed to meet non-Eu-ropean priorities.
The social challenges include the key areas of a grey-ing population, the need for competitive and knowl-edge based manufacturing and service industries, the
creation and retention of high quality employment,greater opportunities for social inclusion (and particu-larly the gender gap within manufacturing) and deal-ing with economic and competitive disparity arisingfrom current and future EU enlargement.
Finally, a strong Advanced Robotics sector will alsohelp Europe meet its essential security needs by pro-viding flexible response mechanisms for dealing withthe wide range of civilian security issues faced by Eu-rope and thereby providing a greater perception of se-curity for the European citizen. In this area EUROPcan be a key catalyst in the effective application of
dual-use technologies in civil applications and canmake an effective contribution to European-wide se-curity initiatives such as PASR (Preparatory Action inthe field of Security Research).
EUROPs activities will take advantage of the signifi-cant existing robotics assets in Europe from an indus-trial and research point of view. Furthermore, EUROPwill take advantage of outcomes from the world-classrobotics research supported by many EuropeanMember States, ESA and the EU Research Frame-work Programmes by, on one hand, developing im-
proved co-ordination between European civil RTDefforts and, on the one hand, promoting the dual useopportunities presented by an improved co-ordinationbetween European civil RTD efforts and similar ef-forts with defence-related RTD.
8/8/2019 Robotics Good One
18/50EUROP SRA methodology - 11
EUROP SRA METHODOLOGY
The major expectation from industry is to develop in-novative robotics products in the different market seg-ments by 2020. Inherently, these products willpresent multiple technological challenges that need tobe solved, and thus will need breakthroughs in sever-al technological axes.
One of the first objectives of the EUROP platform is toidentify the technological axis where cross-fertilisa-tion will benefit and provide technological solutions torobotic products in the defined market segments. In-deed, the objective was to highlight the technologicalaxis where common research efforts should be fo-cused.
Through a series of three workshops with 70 EUROPmembers, this first objective was achieved with thefollowing method:
The first step consisted of defining reference productscenarios ready for market by 2020 in the five de-fined market segments. Each scenario includes end-user needs, product requirements, key features, de-sign concepts, business model and a developmentroadmap.
The goal of the second step was to characterise majortechnological breakthroughs and their relevance tothe products. During a second workshop, the maintechnological challenges were identified for each
product, through the consideration of their key fea-tures and development roadmaps. As a result, theplatform managed to consider more than120 challenges.
These challenges were then crosschecked with thetechnological axis defined previously in the docu-ment. The goal was to determine, for a given chal-lenge, where technological breakthroughs areneeded to answer the challenge.
The outcome of this step is a mapping of break-through requirements in the different technologyaxes and domains to each of the reference productscenarios.
Lastly, the final step consisted of reaching a consen-sus on the technological breakthroughs by fusing,analysing, and cross-fertilising the outcome of steptwo. As a result a common technology requirementroadmap across the market segments has beenelaborated.
In the next sections, the product scenarios, break-through requirements, cross-fertilisation and commontechnology roadmap will be presented at a detailedlevel.
Reference product scenarios in 5 Market segments
Industrial SecurityProfessional
serviceDomesticservice
Space
ID Breakthroughs in technological domainsneeded to overcome challenges
ID technological challenges in product scenarios
Cross-fertilisation analysis for 3 Technological Domains
OUTCOME- Common challenges Identification- Prioritisation and justification- Technology roadmap
8/8/2019 Robotics Good One
19/5012 - Applications driving research
APPLICATIONS DRIVING RESEARCH
Product scenariosA set of visionary reference products was selected bythe platform. This set is the result of an iterative pro-cess which evaluated more than 100 proposals of fu-
ture product scenarios submitted by EUROPmembers. The following table summarises the num-ber of scenarios selected per market segment, whichwere filtered based on innovation, competitivenessand market relevance criteria during the first platformworkshop.
In the following five market segment subsections, themarket segments and their selected product scenari-os will be described. For each market segment, oneproduct scenario will be described in detail and a gen-eral description will be given for the others.
Industrial segmentIt is recognized that future manufacturing scenariosthroughout all industrial branches will have to com-bine highest productivity and flexibility with minimalmanufacturing equipment life-cyclecost. This para-digm is particularly valid for todays small and mediumsized productions as these are particularly prone torelocation due to high labor costs. Facing these chal-lenges paradigms of knowledge-base manufacturinghave been formulated, which concentrate on high-
added value products, skilled work force and superiormanufacturing technology to respond to changingcustomer demands. This holds particularly for the sit-uation in the New Member States where a sustain-
able alternative to typical low-wage manufacturinghas to be offered.
Up until now robot automation technologies havebeen specifically developed for capital-intensivelarge-volume manufacturing, resulting in relativelycostly and complex systems, which often cannot beused in small and medium sized manufacturing. Fur-thermore new branches of robot automation such asfood, logistics, recycling etc. require radically new de-signs of robot systems. Thus, future robot systemswill not be a simple extrapolation of todays technolo-gy but rather follow new design principles required bya wide range of possible applications (applicationpull). Novel technologies, particularly from the ITworld and mass markets will have an increasing im-
pact on the design, performance and cost of industrialrobot automation (technology push). From the currenttrends it is evident that the operation of robots will in-creasingly depend on information generated by sen-sors, worker instructions or CAD product data. Thus itcan be expected that manufacturing competence willbe further concentrated on robot systems as a keycomponent in the digital factory of the future.
The discussions about the future of manufacturingautomation culminated in five product scenarios thathelp to formulate requirements towards future robot-
ics solutions, to identify challenges and obstacles toprogress and to deduce research challenges. Thesefive product scenarios are:
Large structure manufacturing robots.
Robot systems with integrated process control.
Flexible manufacturing concepts based on robot-robot co-operation.
Robot Assistants in industrial environments.
Clusters of robots with coordinated movement
(closer look).
Selected
Industrial 5
Professional Services 6
Domestic Services 5
Security 3
Space 3
Number of product scenarios 22
8/8/2019 Robotics Good One
20/50
8/8/2019 Robotics Good One
21/5014 - Applications driving research
A closer look: Clusters of robots with coordinated movement
Clusters of robots individually sharing a specific work-scope in a common area will become a key-technology toincrease productivity in mass-production industries such as automotive, electronics and white goods. As robots
continuously increase their performances, speeds and abilities there will be a need to increase their working rangeby moving them along the process lines.
Loop-arrangements (continuous flow) of processes in comparison to line arrangements are advantageous from apoint of view of working space, material-flow, worker accessibility as well as availability of line. There is a strongtrend towards suspended (ceiling mounted) robots in order to have free access for workers or/and to keep spacefree for machines, process and material flow.
The technology challenges for this system lie in the three following categories:
Ceiling mounted robot track structures Self-supporting robot track structures.
Line, curve or loop arrangements of robottrack. High torsional.
Bending stiffness.
Switching stations for maintenance- or service-tracks
Communication to & between robots Advanced HMI technologies.
Radio controlled real-time communication.
Easy to handle multi-robot programming.
Radio performed safety features (E-stop,
enabling switch).
Robot technologies Lightweight robots to reduce moving mass.
On-board controller.
Compliance with latest safety regulations.
Advanced sensing and calibration technolo-gies.
Business Model
Product roadmap
Manufacturer
Integrator
Customer
2008 2010 2014 2018
Ceiling Mounted robot
prototypes
Wide cover of the
process line; high
speed
Medium cover of the
process line
R&D Safety, integrity
8/8/2019 Robotics Good One
22/50Applications driving research - 15
Professional service segmentIn the professional market, a number of robots are al-ready successfully operating in field areas such asforestry, agriculture, cleaning, surgery and rehabilita-tion, mining, autonomous transport of people, goods,demolition, nuclear power plants Future potentialapplications range from transportation (smart cab) toprosthetics and (remote) medical interventions tohostesses and smart attendants. Robot diffusion in allthese areas is gradually happening and Europe has anumber of dominant suppliers. However non-Europe-an companies are rapidly entering the market.Through the creation of joint initiatives, it will be pos-sible for Europe to maintain its leadership in a domainthat is expected to have a value of at least 2B overthe next 4 years.
The six product scenarios presented are the follow-ing:
Service robots for aerospace maintenance.
Autonomous handling.
Fabricator: "the robot apprentice".
Mapping inspection robot.
Surgery haptics for tele-diagnostic, training and in-tervention.
Autonomous transport (closer look).
Service robots for aerospace maintenanceIn order to have safer airplanes, preventive mainte-nance is an important issue. Companies want to havebetter maintenance but shorter maintenance time toincrease their profitability. The use of robots is a wayto make maintenance faster and safer. This scenariorequires different kinds of robots; long range robotscan inspect external structures of the plane (wings,fuselage) and smaller mobile robots can be used forinspection of internal parts. The co-operation of sev-eral robots can make inspection more systematic andsafer than human inspection. Aerospace companiescan create a market for such robots.
Autonomous handlingOn harbours, in forestry domains and in mines, heavypayloads have to be handled by huge machines driv-
en by humans. For the human driver, the working con-ditions are rather unpleasant. It appears that themajority of the tasks accomplished by such machinescan be performed autonomously. The rest of thetasks can be performed in a teleoperated or super-vised way. The driver could therefore be taken awayfrom difficult environment. This will ensure fail-safeoperations and longer uptime running.
Fabricator: "the robot apprentice"A fundamental new way in robotics application are as-sistive robots which cooperate with the worker to in-
teractively carry out manufacturing tasks. For this tohappen, the metal helpers must be completely rede-veloped. This new robots must understand easy-to-learn, "intuitive" commands. It must meet all safety-relevant requirements for sharing the workplace withhuman colleagues. And it must be capable of beinginstalled and put into operation within three days. Itsmodular design will ensure a wide scope of applica-tions, be it for processing wood, metal or ceramics, orfor drilling, sawing or lifting. Ideally, it will not be morethan a third of the amount that a conventional systemwould cost.
8/8/2019 Robotics Good One
23/5016 - Applications driving research
Mapping inspection robotIn civil engineering, offshore or in energy supply,there is a regular need for inspection in hazardous orrestricted areas (limited access, radiation, high tem-perature, under water, high pressure). The risk theseenvironments pose for a human beings justifies theuse of inspection robots. Considering the various sit-uation where they have to intervene, inspection ro-bots can be wheeled, flying, swimming, crawling,walking, climbing They need to carry suitable sen-sors for the inspection task but they also have to per-form localisation and mapping to accurately indicatethe position of an eventual repair to be undertaken.
Surgery haptics for tele-diagnostic, training andinterventionHaptic devices are able to give force feedback to thehand of the operator. They can be coupled to realtools to improve remote control of these tools throughprocessing and filtering of the forces. They can alsobe coupled as well to virtual environments to allow thephysical exploration of a virtual space.
The use of haptic devices in minimally-invasive sur-gery can provide the surgeon with a much better feel-ing of what he his surgical instruments and as a resultcan make the surgery much more efficient. Coupledto a virtual patient, haptic devices can help to preparesurgical intervention in a more realistic way avoidingrisk to the patient or the need for animal studies.
Furthermore, minimally-invasive surgery will becomemore and more frequent. It necessitates small size ofopenings and allows a reduction of post-operativetrauma while also reducing the cost and duration ofthe hospital stay.
Today, minimally-invasive tools are more or less grip-pers and scissors. They require a high dexterity of thesurgeon and some interventions are impossible withsuch rudimentary tools. There is a need for high dex-terity tools: a miniature 6 degree of freedom robot thatcould be inserted inside the patients body and repro-
duce all the motions the surgeon would make with hishands surgeon while providing accurate force feed-back.
8/8/2019 Robotics Good One
24/50Applications driving research - 17
A closer look: Autonomous transport
The mission of the autonomous transport is to convey people (cybercars, horizontal elevator concept), or goods(proximity delivery for shops or customers). Autonomous transports could also be operated using a central fleet
management system to collect passengers requests, manage the fleet of vehicles, dynamically assign routes andmissions to them, manage conflicts and incidents, and schedule preventive maintenance.
These robots would be deployed in urban, populated zones, such as pedestrian areas and inner city centres. Theywill need to be partially autonomous; that is to follow an assigned route while ensuring security and safety of pas-sengers and surrounding pedestrians through obstacle detection and avoidance.
The passengers could assign destinations, preferred routes, and be provided with online tourist information andweb services. The fleet management system would calculate routes and the optimisation of traffic, trip duration,and sightseeing assignment.
The technology challenges for this system lie in the following four categories:
Components
Actuation, batteries.
Robust dynamic obstacle detection sensors.
Absolute localisation sensors.
Secured wireless communications.
Intuitive HMI.
Systems Engineering
Safety, integrity, dependability.
Real-time, robustness.
Flexibility, Modularity.
Advanced Behaviours
Safe navigation in populated and unstructuredareas.
Robust navigation using very limited infrastruc-ture.
Dynamic optimisation of routes & missions.
Automatic planning and scheduling.
Fast and easy deployment in new areas.
Robotic technologies
Robust dynamic control.
Precise localisation.
Navigation.
Fleet management/co-ordination.
Business model
Product roadmap
Transport Company:Operation, Maintenance
Public:Passengers &
Goods transport client
Industrial:Vehicles & management system
City
Platform
develop
ment
Operation inopen populated
areas, totalimmersion in
city-center
environment
2006 2007 2009 2012
Legislation & Regulations ImprovementsPublic awareness & Acceptance
Operation in
restricted
areas
Operation indedicated zones of
existing infra-
structure, limitedcohabitation with
manual transports
R&D Safety, integrity
R&D
Localization, Navigation,batteries, human &dynamic obstacle
detection sensors
8/8/2019 Robotics Good One
25/5018 - Applications driving research
Domestic serviceThe introduction of Domestic robots will provide manytangible and intangible benefits to consumers both interms of useful function and through social change.However the section of society that is most likely tobenefit are the elderly and infirm. With the rising costof care and the difficulty of maintaining care stan-dards in an ageing population the application of ad-vanced robots to this segment has many compellingbenefits. The potential to reduce welfare and supportcosts arising from enabling infirm and older people tolead independent lives, living for longer in their ownhomes, is significant, as is the potential to improve themonitoring, quality and consistency of service. Robotcompanions which can perform basic everyday tasksand monitor the well being of the elderly have the po-tential to improve life quality and reduce the associat-
ed support costs while providing improved services.
In the domestic service domain the five selected prod-uct scenarios are:
Cleaning robots.
Personal care assistants.
Companions.
Sports & Rehabilitation robots.
Fetch & Tidy robots (closer look).
Cleaning robotsThe mission of this class of robots is to autonomouslyclean floors in an open-boundary, unstructured do-mestic environment, freeing the user from the choreof having to clean floors on a regular basis. The abilityof the machine to map and navigate around a homewill ultimately allow the user to ask the machine tocarry out sequences of cleaning tasks without furtheruser interaction.
Personal care assistantsThe main purpose of the personal care assistant is toease the daily task of the person thereby increasingtheir quality of life. Examples of these tasks are assis-tance in the mobility of the person, fetching, and car-rying objects, either because they are heavy orbecause the user has misplaced them. Such systems
also bring a degree of safety by monitoring the well-being of the person through remote biometric sens-ing. Being intuitive and safe in use will be a criticalpart of the machine design, as will the design of an in-tuitive interaction between the user and machine.
CompanionsMidway between a toy and personal assistant, thecompanion robot will bring a presence and a person-ality into the home much like a family pet. It can alsoperform simple tasks such as supervision. Again, theinteraction between the companion and the members
of the home would be very adaptive. The robot will beable to evaluate and respond to facial and body ex-pression as well as understand natural language.
Sports & Rehabilitation robotsThis robot will assist the user at home in rehabilitationor for sport exercise. This robot can come in differentforms: from an exoskeleton with passive constraintsto a neural control exoskeleton ultimately able to re-place limb function. As the technology progresses itwill be possible to develop sports companions able tointeract and teach or critique the player at their level
of achievement.
8/8/2019 Robotics Good One
26/50Applications driving research - 19
A closer look: Fetch & Tidy robots
The role of the Fetch & Tidy robot is to be able to recognise and class everyday household objects, evaluate howto grasp and manipulate them and, within a limited context, understand their semantics (for example a self-loading
dishwasher). These simple attributes would allow the robot to fetch and tidy objects to their correct storage places.The safe manipulator technology necessary for these robots will also find outlets in other domestic tasks such asemptying and loading dishwashers. As these types of robot develop they will become able to adapt to a home andits occupants and learn new objects.
Components
Safe actuation and manipulation, batteries.
Absolute localisation sensors, inertial sensing.
3D sensing.
Systems Engineering
Safety, integrity, dependability.
Real-time, robustness.
Flexibility, Modularity.
Advanced Behaviours
Safe indoor navigation.
Dynamic obstacle avoidance.
Centimetre accurate space localisation.
Millimetre accurate self localisation.
Context aware cognitive behaviours.
Robotic technologies
Robust dynamic control.
Advanced grasping.
Manipulation.
Intuitive user interfacing.
Business model
Product roadmap
DistributorMaintenance
Public
Robot manufacturer
and integrator
2006 2007 2009 2012
Greedy collector(non specificpicking, no object
intelligence)
R&D Safety, integrity
Smart collector(minimal objectintelligence,
physicalcharacteristics,small, hard, soft)
Task specifichouseholdmanipulator
Self loading
dishwasher, selfloading washingmachine
8/8/2019 Robotics Good One
27/5020 - Applications driving research
Security segmentRobots in security applications will need to operate inhostile, tedious, or hard-to-access environments thatare partially or completely unknown, complex or poor-ly structured. High dependability properties will be es-sential in the preparation and execution phases of amission. Usability and flexibility will also be required toadapt the robot to its mission and the context of oper-ations. Complex security missions will increasingly re-quire the deployment and co-operation of manyrobotic systems that are inter-operable, inter-commu-nicate, and closely collaborate and interact.
The three selected product scenarios are:
Distributed border surveillance.
Site protection robots.
Disaster response robots (closer look).
Distributed border surveillanceThe border surveillance scenario involves multi-leveldistributed actions. The actors are: different range ca-pacity UAVs and UGVs, fixed infrastructures andcommand station operators. Robotic border patrollingrequires a high level of autonomy in mission manage-ment together with advanced cognitive capabilities.The robotic team will operate and evolve in dynami-cally changing, partially unknown, complex and
sometime hostile or hazardous environment and thiswill require modular, autonomous and mission-recon-figurable platforms.
Site protection robotsCompared to border surveillance, the site protectionrobots operate on a more local level, indoors as wellas outdoors on sites ranging from industrial sites topublic sites. These robots will be integrated in theoverall surveillance team, which includes security pa-trols and a command station, to fulfil tasks such as:surveillance, threat and illegal activities detection, dis-suasive action, entrance control The environmentof operation is one of high dynamic changes and po-tentially of high human presence. Multiple robots, minito micro UAVs, UGV, "human-friendly" robots are en-visioned, for such a scenario.
8/8/2019 Robotics Good One
28/50Applications driving research - 21
A closer look: Disaster response robotics
These robots are to be deployed for disaster assessment and search & rescue operations. This requires multi-level action and a variable number and mixture of active actors both human and robot (UAVs and UGVs, Com-
mand station operators/rescue team/scientists). The missions include inspection, detection of activity (survivors),information gathering, evacuation of people
Components
UGVs.
UAVs.
Localisation, observation, and chemical sen-sors.
Communications.
Systems Engineering
Safety, dependability.
Modularity.
Distributive action.
Fleet management.
Multi-level communication.
Advanced Behaviours
Automatic re-planning.
Resource management.
Priority action management.
Real-time on board data analysis (fusion, sort-ing).
Robotic technologies
Mobility in unstructured area.
Power autonomy.
Grasping.
Business model
Product roadmap
Industrial
States
Rescue Team
Insurances
Platforms integration
Control and Command System
R&D
R&D
Market
2008 2009 2010 2014 20152011 2012 2013
Market
8/8/2019 Robotics Good One
29/5022 - Applications driving research
Space segment" And when the Americans send astronauts toMars, then an European robot should open thedoor for them", this statement of the former Ger-man minister of science and technology,Mrs Bulmahn, expresses precisely the political visionfor European robotics in space. It also describes themajor tasks for space robotics to perform servicesand to support humans in remote hostile environ-ments.
The application of robotics in spaceis unique in thatit forces the robot to operate without direct human as-sistance (autonomously and remote controlled) andto act as a platform for the projection of human capa-bilities to remote and hostile environments, but alsorequires working in combination with astronauts shar-
ing the same workspace. Robotic applications inspace fall into two categories: assembly/repair inspace and planetary exploration, both relaying on re-configurable modules and agents in space:
Assembly & Repair in SpaceIn the past five years, the incidence of on-orbit satel-lite failures has reached epidemic proportions.Space-based robotic manipulators provide the basisfor on-orbit servicing of satellites, through the replace-ment of equipment modules. The recent emergenceof highly dextrous space robots could help relieve
cosmonauts of many routine inspection and mainte-nance chores and enable previously impossible com-plex in-orbit repairs to be undertaken. In the longerterm robots will become humankinds agents andpartners in space, constructing and servicing orbitaland surface facilities with millions of components.
Planetary Exploration RoboticsESAs and NASAs visions for space exploration nowinclude teams that combine the information-gatheringand problem-solving skills of astronauts with the sur-vivability and physical capabilities of robots. In suchfuture space missions, robots will become the person-al assistants of astronauts. They will operate on dis-tant planets, using high level directives, responding toand interacting with humans. They will be our agentsof planetary surface and deep space exploration,handling the repetitive and time-consuming tasks ofdata collection and data reduction. Teams of robotswill survey vast regions, and will classify geologicalfeatures and formations and search for evidence oflife.
8/8/2019 Robotics Good One
30/50Applications driving research - 23
A closer look: Reconfigurable Agents in Space
These elements comprise components for manipulators and locomotion subsystems as well as complex manipu-lators and platforms as components of entire infrastructures. The components include mechanical items combined
with a large variety of general or mission specific sensing elements as well as modules and segments for the re-configurable control of the various robots. The command stations are, in general, remotely located, implicitly re-quiring a high autonomy of systems, equipment and control. The mission profiles include a large variety of supportand servicing functions such as inspection, sample handling, assembly, maintenance, repair, self-reconfigura-tion
Components
Actuators with embedded control.
Sensors with integrated processing.
Self reconfigurating H/W and S/W systems.
Systems Engineering
Reliability, graceful degradation.
Modularity, reconfigurability.
Workspace sharing, co-operation with astro-nauts.
Local autonomy.
Multi-level communication.
Advanced Behaviours
Automatic re-planning.
Resource management.
Priority action management.
Real-time on board data analysis (fusion, sort-ing).
Autonomous reconfiguration.
Robotic technologies
Mobility in unstructured area.
Autonomous Navigation in unknown terrain.
Power autonomy.
Grasping.
Business model
Product roadmap
Space Agencies
Industry
Space Operators
2006 2008 2010 2012 2014 2016 2018 2020
Tele- Helpers
Single Autonomous Agents
Autonomous
Robot Crews
8/8/2019 Robotics Good One
31/5024 - Applications driving research
Breakthrough requirementsThe goal of the second step of the methodology wasto characterise major technical breakthroughs andtheir relevance to the products in each market seg-
ment. During a second workshop, main technologicalchallenges were identified for each product, with con-sideration to their key features and developmentroadmaps. As a result, the platform managed to con-sider more than 120 challenges.
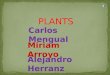
These challenges were evaluated against each differ-ent technological axes to assess where break-throughs are needed. As a result, we can observe ageneral trend of the breakthrough requirementsacross the six technological domains, as i llustrated bythe following pie chart.
We notice that Advanced Behavioursand RoboticSystems and Technologiesclearly stand out. Thisshows a requirement for technical advance in theseareas with the development of improved robot perfor-mance resulting in smarter behaviours. Unsurprising-ly, this trend will be a key driver in the marketdevelopment. However, this is conditioned by robotdependability (safety, fault tolerance) and the capa-bility of integrating appropriate components. This ishighlighted by innovation needed in Componentsand Robotic Systems Engineering.
The need in Miniaturised roboticsis less prominent
perhaps mature research is already underway or thatthe products considered do not highly depend onthese technology challenges.
Industrial manufacturing 25
Professional Services 24
Security 19
Space 10
Domestic Services 49
Advanced
Behaviours
41%
Component
and
Miniaturised
Robotics
25%
Roboti
System
34%
8/8/2019 Robotics Good One
32/50Technology challenges common to market segments - 25
TECHNOLOGY CHALLENGESCOMMON TO MARKET SEGMENTS
Based on the EUROP SRA methodology described previously, a consensus was achieved among the differentmarket segments on the main challenges to address in each technology axis. The outcomes of this first cross-fertilisation are presented in this chapter. First we present a pie chart of the breakthrough requirement distributionfollowed by the consensus of the common challenges and their prioritisation and justifications. A roadmap and itskey elements will conclude each technology axis section.
Robotics System
As illustrated by the pie chart, robotic system de-
pendabilityappears to be the major concern, and onwhich both market access and robotic performancescritically depend as does the mastering of advancedbehaviours. The primary reason for this is that largescale deployment of robots, closely interacting withhumans and deeply integrated into our society (at theworkplace or at home), will stress the safety and reli-ability of robot systems. Closely follows sensing andcontrolwhich is a technology axis largely present inproduct challenges. For the same reason, the devel-opment of optimised manipulation and graspingtechnology is considered an important action.
Breakthroughs in mechatronic designthat will lead
to increasing robotics design configuration and com-plexity, is also regarded as a field of further develop-ment.
Standardisation and normalisation, as well as real-time controlconsiderations, will also have to be ad-dressed. However, our survey reveals that these twoareas are strongly related to systems engineeringmethodologies which would primarily address de-pendability analysis.
The intelligent and distributed environment wasevaluated a field of importance primarily for security
and in longer term for domestic service.
Manipulation and
grasping
11%
Sensing and Control
24%
Normalisation /
Standardisation
11%
Others
1%
Real time control
10%
Intelligent and Distributed
environment
7%Mechatronic design and
miniaturisation
10%
Dependability
26%
8/8/2019 Robotics Good One
33/5026 - Technology challenges common to market segments
Manipulation and graspingThere are key common challenges regarding manip-ulation and grasping across the application domains.Furthermore, it is noted that the professional and do-mestic service and space will probably be the drivers
and the other domains would benefit from them.
The main challenges lie in increasing the payload ca-pability, precision, and speed of the manipulation andgrasping while decreasing the cost. This is an impor-tant issue for the industrial, and services domain.
As basic technologies are almost ready and commonbetween the different technologies, it will be neces-sary to reinforce the existing R&T Teams (e.g.: thelast generation of dextrous manipulators surgical ma-nipulators should find application outside of the labo-ratory).
The domestic and professional services seem to havethe same breakthrough needs in manipulation andgrasping and could therefore lead a common effort;other domains will benefit from this work.
Interface standardisation has also to be defined suchthat, for example, the same grasping device could beused in different applications.
It is also important to encourage the development ofEuropean companies specialised in the developmentand production of grasping parts with different pay-loads and application capability (e.g.: lifting of injured
people, handling heavy parts).
This will help to reduce costs, enabling a growth of ap-plications in "industry" and "domestic". This will ofcourse boost the position of the European companiesto become leaders in these different application ar-eas.
Sensing and controlThe breakthrough demands for sensing and controllinked to dynamic obstacle avoidance and autono-
mous navigation were expressed by the majority ofthe market segments; and therefore makes a case forcross-fertilisation.
The challenges in sensing and control are closely
linked with the application environment of the futureproducts. To operate in controlled and uncontrolledenvironments, there will be a need for sensor fusionand data distribution. The 3D mapping of a dynamicenvironment with changing obstacles and featureswill also demand a high level of sensing competence.
Lastly, as the speed of robots will continue to in-crease, the sensing and motion control capabilitieswill need to improve accordingly.
As sensing and control are the key technologies forany future developments of new applications, it will benecessary:
To work on normalisation and standards (safety);this will help in the development of "plug & play"solutions.
To increase the information exchange betweenCompanies with different specialisation (platforms
like EUROP are the key for the success of this pro-cess).
To develop better sensor and control systems thatwill be essential for all areas and are the basis forother innovation fields e.g. human machine inter-action or improved grasping systems.
To consider space and domestic applications.They both require a high reliability level despitevery different applications; there should be a com-mon effort to use the same strategies in othertechnologies.
This will help to improve usability and to reduce costs,enabling the growth of applications.
Intelligent and distributed environmentThe standardisation of intelligent environments is aprimary challenge for intelligent and distributed envi-ronments.
Standardisation efforts will be needed to achieve agreater exploitation of distributed environments; thiscould be an important step towards further develop-
ments in a number of related research fields.
Another aspect of the intelligent and distributed envi-ronment is closely linked with collective behavioursand is described below under advanced behaviours.
8/8/2019 Robotics Good One
34/50Technology challenges common to market segments - 27
DependabilityIn order to have access to new markets or to be com-petitive, robots will have to be dependable, achieve asmarter behaviour and work in closer collaborationwith humans. Designing dependable robots is a major
challenge for future robotic products in all applicationdomains. As for systems engineering, generic defini-tions can be given to dependability: safety, liveness,timeliness, robustness, resilience, fault tolerance.
Some of these are commonly agreed in generic sys-tems engineering standards (IEEE15288, EIA632).However, dependable robots involve a large set of re-quirements but very specific design solutions. Thismakes existing standards too abstract to be efficientlyapplied. Dependability is essential to avoid human in- juries as well as environment or robot damage.Hence, future business processes will strongly rely on
the safety, robustness, availability and other criteria.Service, manufacturing and security markets will de-velop only if the business case is strong and roboticcompanies can provide evidence of dependabilityguarantees. As a cross-domain example, the wholesensing chain of the robot must be highly reliable,from raw data to symbolic levels.
Providing the evidence for dependable robots or mea-suring the level of guarantees are still open challeng-es which need a variety of expertise (sensors,actuators, subsystems) and skills (software,mechatronic, physic, mathematics). Many difficul-ties can be envisaged when tackling these problems.In particular taking into account human behaviour orbiology as part of the robot environment will provide acomplex challenge. For example, untrained person-nel may be the source of many contingencies for therobots. Lastly, advanced behaviours, which emergein many robotic domains (such as entertainment, se-curity and space, manufacturing) and involve com-plex algorithms (planning and scheduling, inference,knowledge management, learning, explanation, diag-nosis), tend to make dependability particularly diffi-cult to assess.
Architecture design is also an important area of re-search. Fundamentally, architecture is the core of thesolution to dependability requirements. To be adap-tive and adequately responsive to business, environ-
ment and mission changes, robots will have to bemodular and highly reconfigurable.
Indeed, sharing the workspace with human workerswill also require new architectures, as robots will haveto be integrated into our way of life at work, school orhome. Similarly, performing collaborative tasks (with
multiple swarming robots or with humans in the loop)strongly orient architecture designs towards decentr-alised designs. Examples can be found in swarmingrobots, which necessitate distributed control process-es, in Simultaneous Localisation and Mapping, andmore generally when the multiple robots have toshare some knowledge about their environment.
As a first work segment, improving the methodologyand engineering processes are fundamental to tacklearchitectural and dependability issues. These im-provements have to suit the principle and practice ofrobotic engineering, and need to address the com-plete lifecycle. As a side effect, system technologyand architectures will become part of an acquisitionframework for the end-customer. Specific modellingand formalisation methods also need to be developedin order to guarantee dependability properties. As asecond work segment, enabling systems and tools(design, virtual prototyping, dimensioning tools) needto support methodological concepts by exploitingmodelling and formalisation efforts. Lastly, test bedsand benchmarks will complete the acquisition frame-work. As a third work segment, specific research ar-eas must be investigated to support the development
of relevant methodology and acquisition framework:
Requirement engineering.
Fault detection, isolation and recovery.
Proof techniques for dependability.
Analysing the dependability of sensing architec-tures.
In order to develop architecture capabilities, modular-ity and new co-operative architectures have to beconsidered.
As a last work segment, a constant stream of stan-dardisation processes, starting with general guide-lines, shall be maintained. The goal is to stabilise themain invariant from methodology, processes, model-ling, acquisition framework and enabling systems.
8/8/2019 Robotics Good One
35/5028 - Technology challenges common to market segments
Real Time ControlThese systems need to be able to operate in the re-spective environment (both safely and reliably). Thisputs requirements on the development process andqualification.
There is a need for real time capable processing-sys-tems (with respect to. hardware and e.g. operatingsystems) that are optimised for distributed systems(multi robot or modular architecture inside one sys-tem).
The required technology currently is mainly providedfrom the United States.
There is a strong recommendation: that European ac-tivity in these fields is necessary in order to achieve acertain degree of independence (in terms of bothhardware supplier and software technology).
There is a need for real time interpretation of sensordata (at various complexity levels). Similar require-ments will be generated by sensor fusion demands(which are also heavily dependent on the degree ofcomplexity).
Real time capabilities seem more important for appli-cations at a low level than on a high level(w.r.t. system level). Progress in efficient software, al-gorithms, operating systems and hardware will be the
The following figure represents a view of the technological challenge roadmap. For each technology axis, the in-cremental roadmap of one or two main common challenges is illustrated. They were chosen based on the incre-mental progression and relevance.
Technological Challenge Roadmap : Robotics System
2020Noweasier harder
Manipulation &
grasping
Sensing & control
Intelligent and distributed
environment
3D Mapping:
Heterogeneous
& complexenvironment
3D Mapping:
Long termtime scale
Common
protocol
between robots
Common ontology
to allow co-
ordinated move
Medium
weightMicro
weight
Heavy
weight
Small
weight
3D Mapping:
Dynamic
obstaclesand features
Controlled
environment
Common ontology
to allow co-
ordinated action
Real time Control
Simple Real-time sensor
data interpretation
Complex Real-time
sensor data interpretation
Dependability
Architecture design
Methodology Processes
System and technology
Systems and tools
Test beds Benchmarking
Standardisation
Methodology Processes
System and technology
Systems and tools
Test beds Benchmarking
Guidelines Standards
8/8/2019 Robotics Good One
36/50Technology challenges common to market segments - 29
Components and miniaturised robotics
Component breakthroughs will contribute to the in-crease in performance of many aspects of robotics.As expected, Sensors demonstrated the most need-ed breakthroughs as they are undoubtedly a key com-ponent for autonomous robots. There is a fairly equaldistribution over Actuators, Processing and Com-munications, and Man Machine Interfaces. Thisshows that these three technological fields needs to
receive equal importance of consideration.To achieve growth in European robotics cost effec-tiveness and competitiveness, research, develop-ment and production of strategic & innovativecomponents in Europe are key-factors. Nowadays,every European robot company invests time andmoney to develop proprietary solutions regarding al-most every single component and function or buysstrategic components (for performance and/or value)mainly from the Far-East.
The establishment of a European component industryfor specialised robotic parts is an important step in thedevelopment of a European Advanced Robotics in-dustry. The diverse and complex technical nature ofadvanced robots means that it is unlikely that a singlecompany will have access to all of the technology
needed to produce an advanced robot within a givenmarket. For this reason, as in the automobile industry,there is likely to be a strong reliance on subassemblyand component part manufacturers to supply thecompanies assembling final products. The types ofcomponents supplied are likely to range across thetechnical spectrum of parts from mechatronic assem-blies to high-level software components such as map-
ping systems or user interfaces.The research objectives of component technologieshave an important link to standardisation both interms of defining the mechanisms for technical inte-gration through interface standards and in terms ofperformance specification. Concentrating on definingstandards will help to ensure the broad cross-domainapplicability of common parts. A further goal that un-derlies the supply of components is the developmentof methodologies for the design and engineering ofdependable components.
Mass-market robotics will not become a reality untilthe individual components that make up an advancedrobot can be manufactured in volume cost effectivelyfor each market and with guaranteed performancelevels.
Actuators
13%
Sensors
22%
Processing andCommunications
17%
Man Machine Interfaces
15%
Control of miniaturised
robots1%
Actuation and sensing,
control and perception
13%
Bio-inspired locomotion
5%
Energy
5%
Micro-nano assembly
2%Others
7%
8/8/2019 Robotics Good One
37/5030 - Technology challenges common to market segments
Within the area of component R&T the key focii are:
To discover technologies that maintain an upwardtrend in power density while improving cost effec-tiveness, efficiency and satisfying the need forsmaller more compact components.
To increase the levels of component integration inorder to drive cost effectiveness and provide thebasis for common component interfaces.
To drive the process of standardisation of interfac-es and performance specifications.
Miniaturisation in the field of actuation and sensing,control and perceptionwas clearly regarded as themost important breakthrough field required. This canbe explained by the need for developing increasinglylight weight or more complex robots where miniatur-ised components are required.
Energyis an important aspect of robotics to increasethe mobility and operation time. It is therefore logicalthat this aspect was considered an area of impor-tance.
Bio-inspired locomotion will hold an increasinglyimportant role in the future. There is a strong motiva-tion to develop robotics, which resembles or mimicshuman or animal motion.
Micro-robots can be defined by their dimensions, thelargest measured in tens of millimetres and the small-est measured in nanometres. The commercial reality
of micro-robotics is critically dependent on size, withmillimetre scale robots likely to be a viable niche tech-nology within a 15-20 year time frame while nano-scale robots still lie in the realm of scientific investiga-tion.
The primary application areas are in small systems in-spection, for example inspecting small bore pipessuch as water or gas pipes, investigating buildingvoids, or in search and rescue activities. There arealso a small number of medical applications wheresubminiature manipulators and tools have an applica-tion, however medical robotics and particularly auton-omous medical robotics are likely to represent a latermarket opportunity possibly outside of the time frameof the current SRA.
Miniature robots have a number of niche applicationsin security and inspection tasks where their small sizeallows them to enter spaces where larger machinescannot go. They may also have advantages in taskswhere the co-operation of many small robots may bemore effective than the use of fewer but larger ma-
chines. For these applications to flourish the means ofassessing the advantage and viability of using manysmall machines must be established. It is also highlylikely that the discovery of novel means of locomotion,actuation, sensing and communication that are highlyenergy efficient and compact will enable particularmarket niches. For these reasons the research intominiature robotics needs to be carefully focused.
ActuatorsThe primary challenge is the integration of sensingand control directly into actuators making them "smartactuators". This will reduce control loop delay times,thus increasing the responsiveness of the actuator.Packaging the actuator with joints and linkages cou-pled to sensing and control will result in tighter finalproduct integration.
A further challenge is the increasing of efficiency, andpower density in drive mechanisms and actuatorsparticularly for products using portable power sourcesand the reduction of noise particularly in smaller actu-ators used in everyday human environments.
Miniature end effectors used in tele-operation sys-tems are likely to provide an initial commercialisationof the underlying technologies for miniature actuatorsand sensors as in these types of application the con-straints of miniaturised power supply, processing andcommunications are reduced by the umbilical cable.
The key research goals focus on:
Finding the technologies required to progressivelyimprove power density, and to maintain a cost re-duction progression for a given specification.
To find technologies to allow low speed actuatorsthat exhibit high dynamic properties allowing finercontrol under variable loads.
8/8/2019 Robotics Good One
38/50Technology challenges common to market segments - 31
Coupled to this are goals related to cost reduction,where mass markets can be opened up by being ableto supply high performance parts at low cost. Thesegoals may well require the use of novel materials toachieve their target specifications.
Key to many future Advanced Robotic products areimprovements in actuator technology. At one end ofthe product spectrum the delivery of low speed hightorque components with high accuracy will enable theconstruction of high performance robot arms for man-ufacture and space manipulation applications.
The delivery of lower costs and higher power densi-ties resulting in smaller packaging coupled with stan-dardised interfaces and integrated sensing of the jointmechanics will enable applications such as a domes-tic fetch and tidy robot to become a cost effective re-ality. Such developments will also enable the
provision of standard modular manipulators for easilyreconfigured assembly operations.
SensorsSensors are one of the critical components where it isimportant to maintain a high level of innovation withinEurope. The key common challenges across the dif-ferent market segments are:
Cost effective and fast 3D volume sensing sys-tems able to detect, locate, track and identify ob-
jects within their field of view at fast frame rates.
Low cost ultra-low drift compact inertial sensors.
Large area contact and pressure sensing systems
Current prototype systems are all limited by the qual-ity and rate of 3D sensing. In all applications from au-tomated transport to domestic appliances theknowledge of where objects are in the environmentaround the robot is critical to carrying out its task. Thequality of 3D sensing is also critical to the dependabil-ity of advanced robotics, and the lowering of costs is
critical to the opening up of a mass market.
The development of ultra low drift inertial sensors isimportant to both industrial and space applications foradvanced robots where precise knowledge of linkage
location/orientation and body location over long peri-ods of time without the need for recalibration will allowthe development of more self-aware systems.
The development of large area contact and pressuresensing systems able to localise the point of contactare critical to achieving the high levels of dependabil-ity that will be demanded of co-operative systems.
Processing and CommunicationsThere are significant common challenges in this area.In particular the development of software and inter-face standards is critical to the development of across domain component industry enabling it to deliv-er high level advanced robotic components such asnavigation systems, or 3D sensing systems able toconnect to a common platform standard.
Further challenges come from the development of in-tegrated sensor processing systems that require spe-cialised computer architectures to implement signalprocessing tasks at high speed. The cost-effectiveproduction of these components is critical to the de-velopment of a volume market for Advanced Roboticproducts.
In communications the development of ad-hoc peer topeer protocols for dynamic networks is of significantinterest to multi-robot applications where many robotsmust communicate to achieve a common task, such
as in search and rescue applications or the moving ororganising of amorphous materials, such as grain orsand, over large areas.
Key research goals are based on the common agree-ment of interface standards at both the hardware/soft-ware boundary, and in particular the development oflayered interface standards that respect the flexibilityof the boundary in different implementation schemes;and the development of interface standards at thehigher level processing layers. High-level interfacestandards will enable 3rd party provision of complexsoftware components such as navigation, map con-struction and human interfaces will allow the sharingof technical IP through a component market.
8/8/2019 Robotics Good One
39/5032 - Technology challenges common to market segments
Human-Machine InterfacesThe Human-Machine Interface represents one of themost significant challenges in Advanced Robotics.Without intuitive and easy to use interfaces the prima-ry goal of having robots collaborate and cooperage
with humans in everyday environments cannot beachieved. Critical to co-operative interaction betweenhumans and Advanced Robots are intuitive interfacesthat allow a human co-worker to instruct and pro-gramme the robot to carry out tasks without havingspecialised knowledge of the operation of the robot.In some environments this can be achieved throughan HMI that allows the robot to mimic the actions ofthe user in order to learn a particular process.
In other application environments the instructions willconsist of higher level commands relating to functionsthe robot inherently knows how to perform. Each of
these types of HMI requires significant researchbreakthroughs to be accomplished with the levels of
dependability that will be required.
Complex machines require simple interfaces if theyare to be operated efficiently and safely. The commu-nication process must be bi-directional with the ad-vanced robot being able to communicate its actions,decisions and problems at a human level.
This bi-directional communication may be carried outthrough different modes of communication, physical,spoken visual, gestural; each requiring different levelsof research breakthrough to become a componenttechnology.
High-level intuitive interfaces for human-robot "on-line" interaction, multi-modal interaction (speech,gesture, haptics, emotion recognition), immersive"off-line" virtual programming tools, solutions basedon wireless signal transmission together with the def-inition of a low cost HMI with commonality to domestic
devices, will permit a better diffusion of robotics intoSME organisations and use by untrained people.
The following figure represents a view of the technological challenge roadmap. For each technology axis, the in-cremental roadmap of one or two main common challenges is illustrated. They were chosen based on the incre-mental progression and relevance.
Technological Challenge Roadmap : Components
2020Now
easier harderActuators
Processing &
Communications
Sensors
3D Camera : Highspeed optic flow
Man machine interfaces
3D Camera : humanlevel sensing
Drift Compensationin inertial sensors
Drift Compensationin inertial sensors:Space application
Low latency
sensing Fast sensor bus
Transparent distributed
processing
EmotionalExpression:
spoken
EmotionalExpression:
Physical
Naturallanguage
interpretation
Integratedsensing
Intrinsicallysafe actuators
Integratedcontrollers
8/8/2019 Robotics Good One
40/50Technology challenges common to market segments - 33
Advanced behaviours
More than in any other domain, the advanced behav-iour domain exhibits fragmented research and devel-opment areas. Significantly, breakthroughsencompass a very wide range of challenges and in-volve cross-domain technologies in many ways. Im-proving autonomy, developing cognitiveapproaches, and determining Human machine inter-actionsare the key breakthroughs to achieve com-