Embed Size (px)
Citation preview
ROBOTICS AND LUNAR EXPLORATION
Ayanna M. Howard, Ph.D. Human-Automation Systems Lab
School of Electrical and Computer EngineeringGeorgia Institute of Technology
Acknowledgements: Dr. Edward Tunstel, Lead Engineer, MER Mobility Team
Dr. Paul Schenker, Manager, Robotics Space Exploration Technology Program

Why Robots?
• WHY NOT JUST HUMANS FOR PRE-CURSOR LUNAR MISSIONS??
• Has been PROVEN that Human Control is NOT Safe!!
• When steering commands are delayed by communications there is a tendency for the operator to over-steer and lose control.
• It was shown that with a communication delay corresponding to round trip to the Moon (about 2 1/2 seconds) the vehicle could not be reliably controlled if traveling faster than about 0.2 mph (0.3 kph) [Adams 1961]

Why Robots?
• WHY ROBOTS FOR SORTIE MISSIONS??• A complex extended mission will require more tasks than
humans can support without help.• Crewmember time will be a very valuable resource, so
mundane tasks should be minimized. This will allow the crew to apply their expertise where it is most needed.
• Extra-vehicular activity is particularly risky for humans, but will be unavoidable for a complex mission.
– Spacesuits restrict mobility, dexterity, and visual field– Suit pressurization opposes bending motions, reducing effective
stamina– Limited time during EVA, plus time for pre-breathing

• More increasingly, robotic vehicle autonomy is necessary for ensuring science return and achieving overall success of planetary surface missions
• Recent and planned missions include requirements that rely on autonomous mobility and manipulation technologies to achieve mission success– Mars Pathfinder (MPF) (Sojourner rover):
• traverse to science targets to acquire spectroscopic measurements
– Mars Exploration Rover (MER): • traverse to new locations over terrain of
some reference complexity and accurately place instruments onto science targets
• maintain estimated position knowledge within some % of distance traversed
– Mars Science Laboratory (MSL); ExoMars
Rover Functionality

MER Benchmark for Rover Autonomy
• MER represents the longest deployment of planetary rovers in remote planetary surface environments.
• A new benchmark in planetary robot autonomy and human-robot systems (in addition to a landmark in planetary in situ scientific exploration)
• Assess rovers’ performance (surface navigation and instrument placement) to facilitate understanding of future robotic systems by providing metrics derived from Mars performance data for Spirit and Opportunity.

Surface Operations
• Rover technologies can be classified based on four common technologies
Surface Mobility
Human-Robot EVA Interactions
Science Perception,Planning & Execution
(Mobile Autonomy)
(Mobility Mechanization)
Position sensors, collect and processsamples
May include sample containerizationand return-rendezvous phases
Terrain assessment, pathplanning, visual servoing
Extreme terrain access,energy efficiency
Tele-operation andhuman supervision ofrobotic explorers
Robotic work crews
On-board and ground tools;data analysis, targetselection, operationsplanning and execution
Instrument Placement andSample Manipulation

Surface Mobility
• Characteristics include:– Distance/range– Speed– Terrain accessibility (slopes, obstacles, texture, soil)– Load carrying capability– Agility (turn radius)– Access (vertical, sub-surface, small spaces, etc.)
Movement is a key requirement for autonomous planetary rovers. Focus is to enable planetary rovers to traverse long distances on challenging terrains safely and autonomously.
• Trade-offs on design include:– Maneuverability– Traction– Climbing ability– Stability– Efficiency– Environmental impact
QuickTime™ and aMotion JPEG OpenDML decompressor
are needed to see this picture.
HumAnS Lab, GeorgiaTech

Science Perception, Planning, Execution• Provide ground tools for scientists to plan days events, while
allowing generation and robust execution of plans with contingencies, concurrent activities, and flexible times
• Characteristics Include:
• Sensing
• Analysis (e.g. chemical analysis)
• Data processing
• Understanding of Context, Knowledge, and Experience
Global Site Knowledge
In-Situ Measurement
Modeling
Hypothesis Generation
HypothesisTesting
Sensor, terrain-interaction, and navigational control models driveearly operational scenario assessment and design validation

Human-Robot EVA Interactions• Characteristics
– Ground based supervised autonomy (versus tele-operation)• Operator may enter planning, monitoring, and control at multiple
levels
– Proximate telepresence– Shoulder-to-shoulder interaction– Robot assistants
QuickTime™ and aAnimation decompressor
are needed to see this picture.
HumAnS Lab, GeorgiaTech

Instrument Placement/Sample Manipulation
• Common Characteristics Include:– Mass and volume– Fragility, contamination, reactivity– Manipulation technique: Torque, Precision, Complexity
of motion– Repetitive vs. unique– Time– Moving with minimal disturbance
Arm placement and object manipulation involves touching a specific point in 3D space, grasping an arbitrarily oriented object in 3D space, and moving an object from one location to another.
The CHALLENGE Get there efficiently and safely
And, move the arm so that it does not try to violate its own joint limits
And ensure that it does not hit itself or the rest of the robot, or any other obstacles in the environment

Capability Benchmarks: MER to MSL
Landed Mass 174 kg ~600 kg
Autonomous Traverse 17.5-34.5 m/hr 89-100 m/hrRates
Designed Driving ~4500 m 5000-10,000 mDistance
Approachability 2.93 m/sol 6.67 m/sol
Power/Sol 400 - 950 w/hr ~2400 w/hr
Instruments (#/mass) 7/5.44 kg 6-9/65 kg
Data Return 50-150 Mb/sol 500-1000 Mb/sol
Mars Exploration Rover
1.2 m
Mars Science Laboratory

Current State-of-the-Art• Autonomous mobility and sample access
– MER mobility: 10-120 m/sol to commanded point with > 90% success, < 20 degree slopes, sparse obstacle field
– MER visual odometry: ~2% accuracy over distance traveled– MER sample access: RAT, wheel scuffing of soil– Deep Space 2: Small, sub-surface micro probe, ~50cm access
• Autonomous instrument deployment– MPL arm: ~2 m reach, 4 DOF, operated from fixed platform– MER arm: 90 cm reach, 4 DOF, operated from mobile base
• On-board autonomous science– Human-commanded on per-sol basis– Fixed sequences
• Human-robotic field science– No operational experience
• Human-robot interaction– Sojourner/MER: Ground teleoperation– MER: Commanded on per-sol basis
=> Laboratory, and some field, demonstrations of long-range navigation (< km per command cycle), 7DOF arms, meter-deep drilling, single instrument placement, autonomous science planning and execution, robotic assistants, etc.

goalautonomous
traverse route
partial panoramagoal
Challenges to Mobile Autonomy
APPROACH & INSTRUMENT PLACEMENT:Autonomous placement of a science instrument on a designated target, specified in imagery taken from a stand-off distance. Precise contact measurements and autonomous sample manipulation. Drilling to 1000m depth. Visual servoing/approach to multiple targets in single command cycle.
AUTONOMOUS TRAVERSE:Autonomous traverse, obstacle avoidance, and position estimation relative to the starting position. Single vehicle to access all terrain types, cover long distances, and carry/deploy a
payload.
ONBOARD SCIENCE:Autonomous processing of science data onboard the rover system, for intelligent data compression, prioritization, anomaly recognition. Human level cognition and perception of science opportunities.
cameras & spectrometer
drilling & scoopingprocessing and caching
SAMPLING:Sampling, sample processing, and sample caching through development of controls for new system components.

Challenges: Lunar Characteristics
• Gravitational Characteristics
• Low gravity: 1/6 Earth’s - low energy locomotion
• Rotational/Orbital Characteristics
• Communications easy from near side, difficult from far side, periodic at poles
• Long days, long nights: 14.6 days light, 14.6 days dark
• Sun skims horizon at poles
• Permanent shadows in polar craters
• Earth-to-Moon Characteristics
• 2.5 second round-trip speed-of-light delay

Challenges: Lunar Characteristics
• Impact Craters
• Microcraters: 10-8 - 10-3 meters
• Regolith craters: 10-2 - 103 meters
• Large craters/Impact basins - 102 - 106 meters
• Volcanic Channels, Collapsed Lava Tubes, Mountains
• Regolith
• 2-8 meters deep in maria regions
• 15 meters deep in lunar highlands
• Dust
• Extremely fine, electrostatically charged

Capability Trends

Time Estimates for Space Robotics
202095%95%
80%70%
Multi-modalcommunicationBehavior tracking
Percent of interactionsinterpreted correctly byrobot
20203-5<<1Human-Robot FieldScienceCo-located Interaction
# robots supervised perhuman
202010’s7Instrument Placement,Human-RobotInteraction
Autonomously controlledmanipulator degrees offreedom
2020<20>100Field ScienceCommand cycles tosurvey/characterize site
200913-6Instrument Placement,Field Science
Command cycles persample acquired
Dozens
10’scms
VL1
100m1km
SOA
20131-2Field ScienceCommand cycles persample processed
20092015
1km10km
Autonomous NavigationAerial Traverse
Distance traveled per day
2015>VL2,cliffs,craters
Autonomous NavigationDifficulty of terrain that isaccessible
201310-20 msSub-Surface AccessDrilling depth
AvailableTargetValue
Technology /Sub-Capability
Metric

EXAMPLE: Rover Metrics
Mobile Robot Range (meters)
10 100 1000 10000
VL2
50% slope
1
VL1
Cliff-hanger
QuickTime™ and a decompressor
are needed to see this picture.
QuickTime™ and a decompressor
are needed to see this picture.
QuickTime™ and a decompressor
are needed to see this picture.
QuickTime™ and a decompressor
are needed to see this picture.
QuickTime™ and a decompressor
are needed to see this picture.
QuickTime™ and a decompressor
are needed to see this picture.
QuickTime™ and a decompressor
are needed to see this picture.
QuickTime™ and a decompressor
are needed to see this picture.QuickTime™ and a
decompressorare needed to see this picture.
QuickTime™ and a decompressor
are needed to see this picture.
Sojourner
Nanorover
Cliff-bot
Dante IIRobot WorkCrew
LSR
Inflatable Rover
MSL
NOMADHyperion
10 + commands peroperational cycle
3 - 10 commands /ops cycle
1 - 3 commands /ops cycleSelf-righting
2 kg rover
7 Kg, 1 meter footprint,composite construction,
lightweight rover
15 kg, 1.5 meterwheel, 50 cm/sec
70+ degree navigablecliff descent / ascent
Extensible cooperativemulti-robot work
system
Tethered crater descent
Background image:MER 2 with Sojourner model
QuickTime™ and a decompressor
are needed to see this picture.
Reconfigurable rover,
40- 50 degree slope
access (in simulated
sample cache transfer)
QuickTime™ and a decompressor
are needed to see this picture.
Limbed excursion robot for surface
and space structures — has
changeable end effector
sensing/tooling
LEMUR 1
QuickTime™ and a decompressor
are needed to see this picture.
Autonomous urban
recon rebot
URBIE
MER
Sample
Return
Rover
LEMUR, JPL
QuickTime™ and aYUV420 codec decompressor
are needed to see this picture.

Sortie Missions: Robotics
Proximate Telepresence• In many missions, the humans will be near the robots but will be
supervising them from a safe distance (e.g., in a habitat or on orbit). To facilitate the interaction, the robots should have capabilities similar to humans (especially in terms of manipulation) and the level of control between robots and humans should be highly flexible (“sliding autonomy”). Situational awareness of the supervisor needs to be high, which can be facilitated with both multi-modal feedback and high-level interpretation (by the robot) of sensor data. Safeguarding to prevent harm to the robots is critical.
Shoulder-to-Shoulder Interaction• In some missions, humans and robots will be co-located on site, working
together. At a basic level, the robots will need to understand and communicate with the astronauts using both speech and gesture. In addition, in many cases they will need to infer (without communication) the behaviors and intentions of the astronauts and alter their activities accordingly to support the astronauts’ goals. Safeguarding to prevent harm to the humans is critical. (Some risk)

• NASA-JSC Boudreaux– an Extra-Vehicular Activity (EVA) Robotic Assistant
• Specific sub-capabilities include:– Site development (survey, excavation, resource deployments)
– Site maintenance (inspection, repair, assembly, materials transport)
– In situ resource production (robotic support to extraction, transport, manufacturing)
– Field logistics and operations support (materials & equipment transport & warehousing)
– Human-robot interaction (H/R task allocation, teleoperation, remote supervisory control, etc.)
Surface EVA Assistance
JSC
QuickTime™ and aYUV420 codec decompressor
are needed to see this picture.

Why EVA robots must assist humans
• Humans are necessary for surface EVAs– Adaptability, Intelligence, Dexterity
• Robots are necessary for surface EVAs– Pack mule, extra hand, situational awareness
– Put robots at risk instead of humans
JSC
QuickTime™ and aYUV420 codec decompressor
are needed to see this picture.

Robot Capabilities• Have a robot assist an astronaut in deploying science
instruments (e.g. geophones)
• Various forms of interaction: voice commanding, gesture recognition, dialogue, full autonomous mode, traded autonomy
• Various forms of Capabilities: mobility, manipulation, autonomous traversal of rugged terrain, tracking of suited crew member
Robonaut, JSC
QuickTime™ and aMS-MPEG4v2 Codec decompressor
are needed to see this picture.

Benefits for Sortie Missions
• Robotic ISRU, robotic precursor preparation and ongoing robotic mission support are enabling for due to impact on sustainability and affordability.
• Human safety is enhanced through precursor robotic site preparation.
• Field operations productivity is enhanced through robotic “mule” support and robotic mobile communication networking.
• Astronaut productivity is enhanced by lowering maintenance and inspection overhead assigned to human crew.
• Ground-crew interaction productivity is enhanced by improved human-robot interfaces.

Summary State-of-the-Art
• Robotics has not been used for lunar exploration.
• State-of-art can be indirectly measured from sub-capabilities with terrestrial deployment, TRL6 and below:
– Site development: Autonomous robotic excavation and site shaping has been demonstrate by joint CMU – Caterpillar front loader system.
– Site development: Communication infrastructure deployment by various university research groups in the DARPA Centibots program has set up networks using robot teams in unexplored urban areas.
– Site maintenance: Dexterous manipulation under teleoperation has been demonstrated in analog environments by both Ranger and Robonaut research teams with astronaut glove-level dexterity and 6x slowdown.
– Field logistics and operations support: Long-distance autonomous navigation has been demonstrated on the order of 100km total distance traveled.
– Field logistics and operations support: Architectures for perception, planning and control have demonstrated efficacy in Mars-analog tests at JPL and Ames.
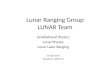
Deliverables for Capability
Major Decision Major Event / Accomplishment / Milestone Ready to UseEnhancing/Evolutionary
2005 2010 2015
(2017)Mars ISRUExperiment
(2015)Spiral 2 Lunar
Surface Ops
10.6.1 Human-robot interaction
10.6.2 Field logistics and operations support
10.6.3 Robotics for ISRU
10.6.4 Site development and maintenance
10.6 Robotics for Lunar and Planetary Habitation
Adjustable autonomy,visualization for humansupervision
TRL 4
CRL 7
CRL 7
Networking, roboticaccess, long-distance nav,planning
Excavation, facility setupISRU system management
Site survey,manipulationdefect detection, etc
Terrain shaping,facility mgmnt
CRL 7
CRL 7
Agent-based Human-robot InterfaceArchitectures
Dexterous manipulationteleop interfaces
TRL 2-5
Integ. planning &execution; reliable
behaviors; long-range nav
TRL 2-5
Terrain shaping
ISRU Facility mgmnt
TRL 3-5
Site Survey & SIFTVisualization

Metrics for Sortie Missions
?
~ 1
<<10%
96%(MER)
<100m
> 10
SOA
20203+Human-robotinteraction
Maximum parallelhuman-robotsupervisions
2015?Robotics for ISRUCubic metersexcavation perhour
2012< 3Site development& maintenance
# humaninterventions per task
20201000m+Field logistics andoperationssupport
Average distancenavigated perhuman intervention
202099%Field logistics andoperationssupport
Proportion ofnavigation goalsachieved
200825%Human-robotinteraction
% reduction ofhuman cognitive load
AvailableTargetValue
Technology /Sub-Capability
Metric

Conclusions
NASA manned and unmanned missions will be carrying out increasingly challenging tasks on the lunar surface:
• Habitat construction and long term habitation• Mining and in-situ resource utilization• Deep drilling• Scientific laboratory tests currently done only on earth• Biological and habitability analysis
Robotics is key for providing both enabling and enhancing capabilities necessary for achieving the goals of these future missions.