Embed Size (px)
Citation preview

Robotic Perception and Action:
Vehicle SLAM Assignment
Mariolino De Cecco
Mariolino De Cecco, Mattia Tavernini
1

CONTENTS Vehicle SLAM Assignment
Contents
Assignment Scenario 3
Odometry Localization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
Matrix CXk. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
Matrix JΦwk. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
Matrix Cwk. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
Matrix Swk. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
Matrix Ik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
Data Provided . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
Aruco Localization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
UWB Positioning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
Problem 1 8
(Odometry Incremental Localization) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
Problem 2 8
(Odometry and Aruco Incremental Localization) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
Problem 3 9
(Odometry and Aruco SLAM) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Problem 4 9
(Odometry, Aruco and UWB SLAM) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Results 10
Page 2 of 10

Vehicle SLAM Assignment
Assignment Scenario
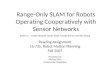
Consider a Differential Drive Vehicle ables to move in an unknown environment with the following sensors:
• Rotational encoders on both the wheel drive (Odometry Localization);
• RGB Camera capable to detect a certain number of artificial landmarks placed in the environment
in unknown positions and orientations. An onboard computer is capable to collect the images and to
extract the bi-dimensional pose of the landmarks identified (Aruco Localization);
• Ultra Wide Band Positioning, and indoor positioning system based on the radio technology with a set
of receivers placed in the environment and a reference tag on the vehicle (UWB Positioning).
Figure 1: Differential drive kinematic model and development robot
The aim of the work is to perform the localization of the vehicle and when it is possible, to map the artificial
landmark placed in the environment. In the next paragraphs there are more details on the localization
system and the data provided.
Odometry Localization
Odometry (Incremental) Localization can be done with the knowledge of the vehicle kinematic model, the
vehicle kinematic parameters and the encoder readings. Since the vehicle is controlled by the two driving
wheels, the rotational encoders are mounted on the wheel. It can be assumed that both the encoders have
the same characteristics. The measurements acquired are the incremental number of counts on wheels. The
vehicle is localized by using the discrete form of odometric navigation reported in [1] and [2]:xk+1 = xk + π · nRkRR+nLkRL
n0· cos(δk)
yk+1 = yk + π · nRkRR+nLkRL
n0· sin(δk)
δk+1 = δk + 2π · nRkRR−nLkRL
b·n0
(1)
where:
• xk+1 is the update vehicle x position starting from the previous knowledge xk,
• yk+1 is the update vehicle y position starting from the previous knowledge yk,
• δk+1 is the update vehicle δ attitude starting from the previous knowledge δk,
• nRk is the incremental counter of the encoder on the right wheel,
• nLk is the incremental counter of the encoder on the left wheel,
• n0 is the counter per revolution of both the encoder (assuming that they have same characteristics),
Assignment Scenario continued on next page. . . Page 3 of 10

Odometry Localization Vehicle SLAM Assignment Assignment Scenario (continued)
• RR is the radius of the right wheel,
• RL is the radius of the left wheel,
• b is the vehicle wheelbase.
In the same article is reported the method to use in order to estimate the odometric localization uncer-
tainty, starting from the uncertainty of the wheel radii, the wheelbase and the initial vehicle attitude. This
formulation already include the uncertainty propagation, and id performed in this way:
CXk+1= CXk
+ JΦwk· Cwk
· JTΦwk+ JΦwk
· Swk· ITk + Ik · Swk
· JTΦwk(2)
in which:
Ik = Ik−1 + JΦk−1 · Swk−1 (3)
In the next paragraphs are described these matrices.
Matrix CXk
The matrix CXkrepresents the covariance matrix of the vehicle pose Xk at the discrete time step k. With
the previous formulation it is possible to estimate the covariance of the vehicle pose at each step, taking
already into account the propagation uncertainty (and so the drift).
Matrix JΦwk
The matrix JΦwkis the Jacobian of the non linear function Φwk
that permits to perform the pose update:
Xk+1 = Xk + Φwk
wk is the vector of the variables that affect the accuracy of the vehicle pose, in this case it is:
wk = [RR, RL, b, δk]
This means that the parameters that affect the accuracy on vehicle pose estimation are the uncertainty on
wheel radii, the wheelbase and the attitude at the previous step.
The Jacobian JΦwkhas to be computed on the discrete vehicle pose update of equation (1).
JΦwk=
∂(xk+1−xk)
∂RR
∂(xk+1−xk)∂RL
∂(xk+1−xk)∂b
∂(xk+1−xk)∂δk
∂(yk+1−yk)∂RR
∂(yk+1−yk)∂RL
∂(yk+1−yk)∂b
∂(yk+1−yk)∂δk
∂(δk+1−δk)∂RR
∂(δk+1−δk)∂RL
∂(δk+1−δk)∂b
∂(δk+1−δk)∂δk
The algebraic formulation of the derivatives in the Jacobian are always the same, the Jacobian must be
evaluated each time with the current values.
Matrix Cwk
This matrix take care of the uncertainties of the variables on vector wk. Assuming that all this variables are
independents, it can be simplified as:
Cwk=
σ2RR
0 0 0
0 σ2RL
0 0
0 0 σ2b 0
0 0 0 σ2δk
The element σ2
RR, σ2
RLand σ2
b are always the same and are given in the parameter section. On the contrary,
the value of σ2δk
must be update at every iteration with the previous value that can be found in CXk.
Assignment Scenario continued on next page. . . Page 4 of 10

Aruco Localization Vehicle SLAM Assignment Assignment Scenario (continued)
Matrix Swk
The elements of the matrix Swkare simply the square roots of Cwk
elements.
Matrix Ik
This matrix represents the integral terms of the encoder uncertainty propagation, it can be computed by
using the equation (3). It can be initialized as < 3 × 4 > zeros matrix at the first step.
Data Provided
The data provided for this localization is the encoderReading.txt file, that is organized as follow: The other
pose number Right encoder counter tick Left encoder counter tick
1 0 0
2 10 9
.. .. ..
n ∆tickR ∆tickL
Table 1: encoderReading.txt file organization
parameters for the vehicle localization are:
Parameters Description Value
RR Radius of the right wheel [meters] 0.1
RL Radius of the left wheel [meters] 0.1
b Vehicle wheelbase [meters] 0.4
n0 Count per revolution (both encoders) 8000
σRRStandard deviation on Right wheel radius [meters] 1e-4
σRLStandard deviation on Right wheel radius [meters] 1e-4
σb Standard deviation on wheelbase [meters] 1e-4
σδk Initial Standard deviation on vehicle attitude [rads] 1e-4
Table 2: Vehicle kinematic model parameters
Aruco Localization
The Aruco Localization is based on a calibrated camera and a set of known markers on the ceiling as depicted
on (Figure 2). Once the transformation between the camera sensor and the vehicle is known it is possible
to estimate the pose of the Aruco marker in the vehicle reference system.
The Aruco Localization is achieved by means of a computer vision algorithm that is capable to detect the
Aruco marker and to estimate their 3D pose (Figure 3).
Since the camera has a planar motion (it is mounted on the vehicle identified by its pose X = (x, y, δ))
and the markers are assumed to be parallel to the camera motion, the 3D pose can be translated into a
2D pose. The data provided for this localization are, for each vehicle pose and for each Aruco marker, the
marker unique-id, its estimated bi-dimensional pose in the vehicle reference system and its uncertainty. This
information are defined as follow:
• i is the vehicle pose index i = 1..n,
Assignment Scenario continued on next page. . . Page 5 of 10

Aruco Localization Vehicle SLAM Assignment Assignment Scenario (continued)
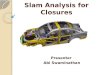
(a) Camera (b) Aruco Marker on ceiling
Figure 2: Camera mounted on vehicle (a) used to detect the Aruco marker on ceiling (b)
Figure 3: Software to detect the Aruco marker and estimated their 3D pose
• j is the landmark index j = 1..m,
• Zij = (xj , yj , δj)i
is the j − th Aruco marker pose measurement from the i− th vehicle pose,
• CZij
=
σ2xx σ2
xy σ2xδ
σ2yx σ2
yy σ2yδ
σ2δx σ2
δy σ2δδ
i
j
is the covariance matrix associated to the measurement Zij .
All this information are collected in the text file ArucoReading.txt.
pose id landmark id xij yij δij σxx σxy σxδ σyy σyδ σδδ
1 12 1.3 2.1 0.1 0.01 0.02 .. .. .. ..
1 3 5 3 -0.5 0.003 0.031 .. .. .. ..
i j .. .. .. .. .. .. .. .. ..
n j .. .. .. .. .. .. .. .. ..
Table 3: ArucoReading.txt file organization
Assignment Scenario continued on next page. . . Page 6 of 10

UWB Positioning Vehicle SLAM Assignment Assignment Scenario (continued)
UWB Positioning
The Ultra Wide Band (UWB) Positioning is a method that in the last years has been improved. Its
configuration is very similar to the GPS Positioning, with the only difference that in this case is the tag that
emits a UWB signal to the antennas positioned in the environment (Figure 4).
Figure 4: Similarity between GPS positioning and UWB positioning
The antennas can only return the distance of the tag (placed on the vehicle). The vehicle position has to
be evaluated by using a triangulation algorithm as depicted in Figure 5. It must be noticed that the tag
is described only by its position: with triangulation it is not possible to evaluate the vehicle attitude. For
this reason the method is called Positioning (that means find the position (xi, yi) of the vehicle)and not
Localization (that means find the pose (xi, yi, δi) of the vehicle).
Figure 5: Position estimation by triangulation
The information achievable from this measurement system are:
• i is the vehicle pose index i = 1..p,
• k is the antenna index k = 1..m,
• rik is the j − th antenna distance measurement from the i− th vehicle pose,
• σrik is the standard deviation associated to the distance measurement rik.
All this information are collected in the text file UwbReading.txt.
Only for this positioning system are given a guess solution for the antenna positions in the environment,
collected in the text file UwbAntennaGuess.txt.
Page 7 of 10

Vehicle SLAM Assignment Assignment Scenario
pose id antenna id rik σrik
1 2 1.4 0.2
1 5 5.2 0.15
i k .. ..
n k .. ..
Table 4: UwbReading.txt file organization
antenna id x position y position
1 1.5 3
.. .. ..
k .. ..
.. .. ..
p .. ..
Table 5: UwbAntennaGuess.txt file organization
Problem 1
(Odometry Incremental Localization)
In this first problem is request to perform the vehicle localization using the raw encoder data in the en-
coderReading.txt file. The incremental pose has to be estimated using the Equation 1 while the uncertainty
can be estimated with the Equation 2. It is important to notice that the formulation of Equation 2 already
include the uncertainty propagation.
Problem 2
(Odometry and Aruco Incremental Localization)
In this second problem, it is introduced the Aruco measurement. In particular is required to perform an
Incremental Localization using the Aruco measurement (like the class exercise without encoder data).
All the necessary information for this step can be found in the ArucoReading.txt file.
N.B.: As in real measurement the measurement ratio of the Aruco markers is lower than the encoder.
This means that while using encoder there is a measurement for each vehicle pose, using the Aruco only
in some vehicle poses i there is a measurement.
Facultative: As facultative improvement try to fuse the information of the Odometry Incremental Local-
ization with the Aruco Incremental Localization. As hint, both the localization must be perform at same
time, and the uncertainty propagation of encoder Equation 2 has to start from the previous fused (with
Aruco) CXkwhen there is an Aruco measurement.
Page 8 of 10

Vehicle SLAM Assignment Problem 2
Problem 3
(Odometry and Aruco SLAM)
Use the information of odometry and Aruco markers to perform a SLAM (Simultaneous Localization and
Mapping) with the GTSAM library. The data to use in this case are:
• file encoderReading.txt
• file ArucoReading.txt
As initial solution for the vehicle poses graph you can use the odometry incremental localization. Regarding
the landmark initial pose for the graph, select the most appropriate way and justify the choice.
Problem 4
(Odometry, Aruco and UWB SLAM)
By using all the information given, develop a SLAM with the GTSAM library using in addition, with respect
to the Problem 3, the information of the UWB sensors. The data to use in this case are:
• file encoderReading.txt
• file ArucoReading.txt
• file UwbReading.txt
For the initial solution of the UWB Antenna positions use the guess in the file UwbAntennaGuess.txt.
Provide the map of the Aruco markers and UWB antennas.
N.B.1:: UWB antennas are identified with a position and not a pose
N.B.1:: UWB antennas and Aruco markers are different landmarks, placed in different place in the
environment.
Page 9 of 10

Vehicle SLAM Assignment Problem 4
Results
They are provided two datasets (a short and a long path).
For each problem (and dataset), provide (when it is possible) the following data:
• vehiclePose.mat
Structure with the reconstructed vehicle pose and covariance:
vehiclePose(..).pose = [x, y, δ]
vehiclePose(..).covari =< 3x3 > matrix
• ArucoMap.mat
Structure with the solved Aruco map:
ArucoMap(..).pose = [x, y, δ]
ArucoMap(..).covari =< 3x3 > matrix
• UwbMap.mat
Structure with the solved UWB map:
UwbMap(..).position = [x, y]
UwbMap(..).covariance =< 2x2 > matrix
References
[1] Mariolino De Cecco, Luca Baglivo, and Francesco Angrilli. Real-Time Uncertainty Estimation of Au-
tonomous Guided Vehicle Trajectory Taking Into Account Correlated and Uncorrelated Effects. IEEE
T. Instrumentation and Measurement, 56(3):696–703, 2007.
[2] Mariolino De Cecco. Sensor fusion of inertial-odometric navigation as a function of the actual manoeuvres
of autonomous guided vehicles. Measurement Science and Technology, 14(5):643, 2003.
Page 10 of 10