Embed Size (px)
Citation preview

Experimental Endourology
Robotic Palpation-Based Mechanical Property Mappingfor Diagnosis of Prostate Cancer
Bummo Ahn, Ph.D.,1 Enrique Ian S. Lorenzo, M.D.,2 Koon Ho Rha, M.D., Ph.D.,2
Hyung Joo Kim, M.D., Ph.D.,3 and Jung Kim, Ph.D.1
Abstract
Purpose: The aim of this study was to estimate the mechanical properties (elasticity) of normal and cancerprostate tissues and to develop a tissue elasticity map for the diagnosis and localization of prostate cancer.Materials and Methods: A total of 735 sites from 35 radical prostatectomy specimens were used in the exper-iments using a robotic palpation system, and the elasticities of the specimens were estimated by a tissuecharacterization algorithm. The estimated elasticities from 21 regions were separated into normal and cancertissues using the pathological information, and a tissue elasticity map was developed using numerical functionsand a nonlinear surface-fitting method.Results: The mean elastic moduli of the normal and cancer tissues were 15.25� 5.88 and 28.80� 11.20 kPa, re-spectively. The base region had the highest elasticity, followed by the medial and apex regions. These resultsdemonstrated the ability to separate the cancer tissue from the normal tissue based on its elastic modulus. Thetissue elasticity mapping was carried out using the estimated elasticity and nonlinear surface fitting. The proposedmap showed the elasticity and was used to estimate the elastic modulus of the prostate at any given region.Conclusion: Tissue elasticity may be an important indicator of prostate cancer because the pathologic changesalter the tissue properties, including cell integrity and intercellular matrix. This work provides quantitative andobjective information for the diagnosis of prostate cancer. In addition, these results may have implications for thelocalization of prostate cancers.
Introduction
Prostate cancer is the most frequently diagnosed cancerin men; about 186,320 new cases were reported in the
United States in 2008. Furthermore, this cancer is the secondleading cause of cancer-related death in men, with an esti-mated 28,660 cancer-related deaths in 2008.1,2 While the opti-mal method for the early detection of prostate cancer has notyet been defined, digital rectal examination (DRE) and serumprostate-specific antigen (PSA) test have been commonly used.Prostate cancer tissues are grittier and firmer than normaltissue, and arise in the peripheral zone (about 80%) of thegland reported by the National cancer information service.Therefore, physicians insert a gloved and lubricated finger intothe rectum of patients. They can detect areas suspicious formalignancy using tactile sensation, which has the promptavailability, cost effectiveness, and low risk. Despite severaladvantages, the results of DRE depend on the surgeon’s ex-perience and are not quantitative.3 Thus, the positive predic-
tive value is 28.0% for DRE.4 Nevertheless, its importancecould not be neglected because abnormal DRE was an inde-pendent result of prostate cancer especially high-gradecancer.5 It was also used in predictive models in clinicallysignificant tumors.6–8 The positive predictive value of abnor-mal DRE is up to 33% even in cases of men with PSA 4 ng/mL.9,10 Moreover, in the literature, they have reported that theearly detection rate of prostate cancers can be enhanced if DREand PSA test were used together,11–13 and the limitations ofDRE should be addressed for more accurate diagnosis.
Robotic palpation systems are aimed at precisely inducingmechanical loading to tissues and recording the biologicaltissue behavior. Several researchers have investigated therobotic palpation, and have developed the systems for theacquisition of elasticity and presentation of the information tophysicians.14–16 The systems could represent the informationobtained by providing tactile and kinesthetic sensation tothe user. Even if the tissue behavior can be measured, theproblem of producing quantitative and objective results still
1Department of Mechanical Engineering, School of Mechanical, Aerospace and Systems Engineering, Korea Advanced Institute of Scienceand Technology, Daejeon, Korea.
2Department of Urology, Urological Science Institute, Yonsei University College of Medicine, Seoul, Korea.3The James Buchanan Brady Urological Institute, The Johns Hopkins Medical Institutions, Baltimore, Maryland.
JOURNAL OF ENDOUROLOGYVolume 25, Number 5, May 2011ª Mary Ann Liebert, Inc.Pp. 851–857DOI: 10.1089/end.2010.0468
851

has to be confronted. One of the possible approaches is thecharacterization of biological tissues.17 Using this method, thequantitative and objective results can be obtained.
In our study, ex vivo experiments on human prostateswere carried out at 21 sites across the posterior surface of thespecimens. The mechanical property (elasticity) of the tis-sues was estimated using the experimental results and theHertz-Sneddon equation.18 The obtained elasticity data werecompared with the pathologic findings, and the tissue elas-ticity map was developed with a nonlinear surface fittingusing the estimated elastic modulus and numerical func-tions.
Materials and Methods
Robotic palpation system
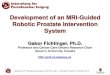
The palpation system was developed to measure the tissuebehavior against mechanical loadings.19 For clinical applica-tions, the system dimension, operation range, and force-sensing resolution should be taken into account. The systemwas designed to have an 8-mm maximum outer diameter anda 150-mm length. The physicians induced deformations ofseveral millimeters onto the tissues by the system. To measurethe tissue behavior accurately, we used a high-accuracy forcetransducer whose resolution was <5 mN. Figure 1 shows thedesign details and the developed system. The system iscomposed of a hemisphere-tip (2-mm diameter) probe (Mis-umi), a force transducer (Kistler Instrument), two movingshafts, a screw, a micro DC motor (Maxon Precision motors), amotor key, a motor key holder, a linear position sensor
(magneto-resistive sensor and magnetic bar; Piezo-tech),several housings, and a connector. When the motor is oper-ated, the system moves as shown in Figure 1b. The system ismanipulated within a range of 8 mm at a maximum velocityup to 3 mm/seconds with<30mm of motion error. During theoperation of the system, the reaction force as a measure oftissue behavior is measured by a force transducer and re-corded with the controller. The developed system is attachedto a link system, as shown in Figure 1d.
Human organ preparation
All patients provided written informed consent, and thestudy was approved by the Institutional Review Board ofSeverance Hospital. Prostate specimens were obtained from41 patients who had undergone radical prostatectomy at Se-verance Hospital, Yonsei University in Seoul, Korea, betweenAugust 2009 and December 2009. Patients who had receivedpreoperative hormonal/radiation therapy or prostate-relatedsurgery were excluded from the study. Patients with clinicallyinsignificant small cancer (<0.5 mL) were also excluded fromthe study. Thirty-five prostate specimens out of 41 patientswere eligible for analysis. The mean age of patients was63.9� 7.9 years (range 42–76 years), and the mean PSA levelwas 9.5� 8.7 ng/mL. The mean preoperative volume ofprostates was 44.7� 19.6 mL (range, 20.1–110.0 mL). Theprostate cancer specimens were divided into the pathologicfindings.20 The clinical stage of the prostate cancer obtainedwith this system was T1c in 20 patients; T2a in 4 patients; T2b
FIG. 1. Robotic palpation system: design details of (a) upper view, (b) cross-sectional view, and (c) lower view, and (d)developed robotic palpation system.
852 AHN ET AL.

in 3 patients; T2c in 3 patients; T3b in 1 patient, and T3c in 2patients.
Experiments
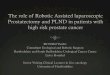
Mechanical experiments were carried out on resectedhuman prostates (Fig. 2a) and the palpation system was usedto measure the tissue behavior against mechanical load-ings.19 The investigator who performed the experiments wasblind to the clinical data. The clinical expert as an investi-gator determined the divided sites of specimens and carriedout the experiments. The experiment consisted of the fol-lowing steps. First, the probe tip was placed in contact withthe posterior surface of the prostate. Then the tissue wasindented at a rate of 1 mm/second to produce the defor-mation. When the deformation was induced, a reaction forceoccurred. This reaction force from indented tissues wasmeasured by a force sensor. In these experiments, we used aprobe whose diameter is 2 mm, and 3 mm depth deformationwas induced to the specimens. Finally, the reaction force anddeformation data were acquired with a data acquisitionsystem. The experiments were performed within 30 minutesafter extraction of the specimen in the operating room. Theindentation experiment was performed at 21 sites across theposterior surface for each prostate specimen as shown inFigure 2a and b. A total of 735 indentations were performedon the 35 specimens.
Mechanical property estimation
Elasticity of the tissue was presented as the elastic modulus(Young’s modulus, E). For normal palpation, uniform defor-mation and friction-free contact were assumed to permitsliding of the tissue across the indenter surface. If the indentercontacted completely with the tissue, the Hertz-Sneddonequation (1) can be applied to estimate the elastic modulus ofthe biological tissues based on the experimental results.18
Therefore, we estimated the elastic modulus of the prostateusing the experimental results and the equation, where E is theelastic modulus, R is the radius of the probe (1 mm), dz is theindentation depth (3 mm), fz is the measured force, and u is thePoisson’s ratio (an incompressible material is about 0.499.).17,19
E¼ 3
4·
(1� �2) · fzffiffiffiffiffiffiffiffiffiffiffiffiR · d3
z
q (1)
Histological examination
After the experiments were completed, the specimens weresent to the pathology department for histological examinationat Severance Hospital. All specimens were fixed in formalinand then embedded in paraffin. The specimens were thenstained with hematoxylin–eosin and examined using an opticalmicroscope, and were analyzed by a single pathologist who
FIG. 2. Ex vivo experiment: (a)human prostates, (b) 21 sitesacross the posterior surface ofthe prostate, and (c) resultsof indentation experiments onhuman normal and cancerprostate tissues.
MECHANICAL PROPERTY MAP FOR DIAGNOSIS OF PROSTATE CANCER 853

was blinded to the results of mechanical testing. The locationand size of the cancer tissues were documented for all sections.
Statistical analysis
The elastic moduli were presented as mean� standarddeviation in kPa. The two samples independent t-test wasused to assess the elasticity differences between the cancerand normal tissues. SPSS version 12.0 (SPSS) was used toperform statistical analyses.
Mechanical property mapping
The tissue elasticity map can be applied for diagnosis ofprostate cancers with comparison between the measuredproperty from the experiments and estimated property with
this map. Thus, we performed the three-dimensional nonlin-ear surface fitting in MATLAB (Mathworks) using the esti-mated elasticity of the prostate. In the fitting, we assumed thatthe organ is a continuum and has 20 mm lateral size fromthe center and 40 mm vertical size from the base. In addi-tion, the nonlinear Gaussian cumulative function and two-dimensional parabola function for normal and cancer tissueswere used to develop the map with the forms
ENormal¼ENormal;0 + A · PH + B · PV + C · P2
V + D · P3V
1+a · PH+b · P2H + c · P3
H + d · PV + e · P2V
; (2)
ECancer¼ECancer;0 + a · PH + b · PV + c · P2H + d · P2
V ; (3)
where, ENormal and ECancer are the elastic moduli of the normaland cancer tissues, respectively. PH and PV are the target po-sition of the horizontal direction at the center and verticaldirection at the base end of the organ. ENormal,0, ECancer,0, A, B,C, D, a, b, g, d, e, a, b, c, and d are the mapping parameters. Toobtain the best fitted parameters of the functions, the Leven-berg-Marquardt method was applied.17 If the parameters areestimated, the elastic modulus of tissues at the measuredpositions can be obtained.
Results
Typical experimental results on the human prostate tissuesare presented in Figure 2c. Overall elastic moduli of 735regions were obtained from the experimental results andHertz-Sneddon equation. The results obtained from me-chanical property experiment were compared with the his-topathological results obtained from the pathologist. In thehistopathological examination, 269 regions of 35 prostatespecimens included the cancer tissues. Cancer tissues werelocated most frequently at the base of prostate (50.9%), fol-lowed by the mid-gland (32.4%) and then the apex of theprostate (16.7%).
The mean elastic moduli of the normal and cancer tissueswere 15.25� 5.88 and 28.80� 11.20 kPa ( p¼ 0.000), respec-tively. For more effective statistical analysis, we assume thatthe right and left sides of prostates have similar character-
FIG. 3. Elastic modulus of normal and cancer prostate tis-sues according to the regions. Color image available online atwww.liebertonline.com/end
Table 1. Elastic Modulus and t-Test Results of Normal and Cancer Prostate Tissues
Elastic modulus (kPa) Independent t-test
Normal tissue Cancer tissue 95% confidence interval of the difference
Region of prostate n Mean SD n Mean SD p-value Lower Upper
1 53 9.82 4.39 17 15.85 7.29 0.000 �8.92 �3.122 62 13.11 4.97 8 21.70 7.83 0.000 �12.60 �4.593 55 14.17 4.66 15 20.37 9.64 0.001 �9.70 �2.694 30 13.36 3.69 5 22.16 6.14 0.000 �12.80 �4.818 45 13.43 3.94 25 20.80 10.15 0.000 �10.77 �3.999 46 17.12 5.56 24 31.90 7.34 0.000 �17.91 �11.67
10 45 18.96 4.65 25 33.30 11.73 0.000 �18.28 �10.4111 22 18.21 5.18 13 35.13 5.73 0.000 �20.75 �13.0815 26 12.12 5.01 44 22.68 8.31 0.000 �14.15 �6.9616 34 18.11 5.74 36 36.47 9.81 0.000 �22.22 �14.4917 30 21.40 5.03 40 35.95 9.11 0.000 �18.24 �10.8718 18 20.87 5.79 17 33.26 4.62 0.000 �16.01 �8.78
Total 466 15.25 5.88 269 28.80 11.20 –
854 AHN ET AL.

istics. Although experiments were performed at 21 regions,the elastic moduli of right and left sides were not statisti-cally and clinically different, and the data of the right sidewere included in those of the left side such as (1¼ 7, 2¼ 6,3¼ 5, 4, 8¼ 14, 9¼ 13, 10¼ 12, 11, 15¼ 21, 16¼ 20, 17¼ 19,and 18). In the normal tissue regions, region 17 (21.40 kPa)demonstrated the highest elastic modulus and region 1(9.82 kPa) showed the lowest property. In the cancer tissueregions, the highest elastic modulus was region 16(36.47 kPa) and the lowest was region 1 (15.85 kPa). In ad-dition, the elastic moduli of normal and cancer tissues aredifferent from the t-test results ( p¼ 0.000). These resultsindicate that the cancer tissue has a harder property thanthe normal tissue for all regions. Furthermore, the resultsconfirm the ability to differentiate cancer tissues from nor-mal tissues based on its elastic modulus. The obtainedelastic moduli and t-test results are presented in Figure 3and Table 1. The tissue elasticity mapping was carried outusing the estimated elasticity and nonlinear surface fitting.In the mapping, the parameters of numerical functions onthe elasticity were obtained as shown in Table 2, and thefitted surfaces of the tissue elasticity are shown in Figure 4.
Discussion
The tissue elasticity may be an important predictor for theprostate cancer identification because the pathologic changesvary the tissue property from the alteration of cell integrityand intercellular matrixes. In this study, the novel method toidentify the cancer tissues using the elasticity was proposed.The experiments on human prostates were performed tomeasure the mechanical behavior with respect to the variousregions of the posterior surface. The elasticity as the quanti-tative and objective information of the prostate tissues wasestimated. The analytical results show that the mechanicalproperties of normal and cancer prostate tissues affect theregions of the prostate. The results also show that the cancertissue has a more hard property than the normal tissue for allregions. Furthermore, the tissue elasticity map was developedwith the numerical function and the nonlinear surface fittingmethod. The map can be utilized as the criteria for the diag-nosis and localization of prostate cancer.
The benefits by applying robotic technologies in urology areto enable physicians to provide precise, objective, and quan-titative information to patients. Several robotic systems weredeveloped by the previous researchers to measure and char-acterize biological tissue behavior against mechanical loadingssuch as aspiration,21 indentation,17,19 compressive pressure,22
and shear strain.23 These devices were used to apply specificmechanical loadings on the surface and measure the tissuebehavior that reflected mechanical properties. In this study,we developed the palpation system, which can be applied as atool for screening prostate cancer through measurement of thetissue properties. The results on the experiments and charac-terization show that our system can precisely measure thebiological behavior of tissues, and the experimental results can
Table 2. Parameters of Elasticity Maps
of Normal and Cancer Prostate Tissues
Normal tissue Cancer tissue
Parameters Value Parameters Value
ENormal,0 7.259 ECancer,0 11.101A 0.913 a 1.366B 3.335 b 1.248C �0.002 c �0.099D �0.002 d �0.019a 0.049 – –b �0.007 – –g 7.019E-4 – –d 0.236 – –e �0.006 – –R2 value 0.997 R2 value 0.859
FIG. 4. Three-dimensional nonlinear surface fitting on theestimated elasticity of the prostate: (a) normal tissue and (b)cancer tissue.
MECHANICAL PROPERTY MAP FOR DIAGNOSIS OF PROSTATE CANCER 855

be used to estimate objective and quantitative tissue proper-ties. The results proposed in this study confirm the ability todifferentiate cancer tissues from normal tissues based on itselastic modulus. Furthermore, this study proposed the elas-ticity maps of the tissues, which were obtained by the grosslymeasured data of the prostate in an ex vivo condition and canbe used as a criteria for the prostate cancer diagnosis.
In the mapping, to find the best fitted equations of mechan-ical property maps, we applied several numerical equationsfor normal and cancer tissues. From the numerical fitting re-sults, we can find that the proposed equations (2 and 3) are thebest fitted. Therefore, we selected the equations and obtainedthe parameters of the equations that were the best fittedfor mechanical property maps for normal and cancer prostatetissues.
The results of this study have limitations on direct ap-plication to the clinical (in vivo) trial because the resultswere obtained from ex vivo experiments. Thus, it is difficultto consider the tissue property between the rectal wall andprostate, which the results obviated because of the experi-mental condition. Since the experiments were performedwithout any information on the cancer tissue location, thereis uncertainty in exactly matching the palpated site with thelocation. In addition, although we classified the prostatewith respect to the 21 regions to increase the accuracy of theresults, the elasticity can be affected because the cancertissues are surrounded by the normal tissues. Furthermore,although the elasticity map on prostates does not considerthe depth of the cancer tissues, prostate cancers generallyarise in the peripheral zone (about 80%) of the prostate.3
Therefore, it can be used as a reasonable tool for the diag-nosis of prostate cancers. In order to increase the accuracyas a tool, the depth information of the map should be re-flected. We need to consider the innate characteristics of theprostate, which reflected the histopathological conditionssuch as tumor site, tumor volume, and Gleason score. Thus,when the proposed maps were applied for an in vivo trial todetect the prostate cancer, the cutoff value of the propertyshould be decided to discriminate the cancer tissues to thenormal tissues.
In the future, in vivo experiments will be performed usingthe system for the purpose of verifying its safety and its po-tential as a clinically practical tool for prostate cancer detec-tion. First, the experiments on animals will be conducted forhuman safety. If safety is verified, then the experiments onpatients will be performed by urologists in the operatingroom. Furthermore, we will modify the system and interfaceto allow real-time prostate cancer detection.
Acknowledgments
This research is supported by Ministry of Culture, Sportsand Tourism (MCST) and Korea Culture Content Agency(KOCCA) in the Culture Technology (CT) Research & De-velopment Program 2010.
Disclosure Statement
No competing financial interests exist.
References
1. American Cancer Society. Cancer Facts and Figures 2008.Atlanta, GA: American Cancer Society, 2008.
2. Jemal A, Siegel R, Ward E, et al. Cancer statistics, 2008. CACancer J Clin 2008;58:71–96.
3. Smith DS, Catalona WJ. Interexaminer variability of digitalrectal examination in detecting prostate cancer. Urology1995;45:70–74.
4. Mettlin C, Lee F, Draep J, et al. The American Cancer SocietyNational Prostate Cancer Detection Project. Findings on thedetection of early prostate cancer in 2425 men. Cancer1991;67:2949–2958.
5. Borden LS, Jr., Wright JL, Kim J, et al. An abnormal digitalrectal examination is an independent predictor of Gleason�7prostate cancer in men undergoing initial prostate biopsy: Aprospective study of 790 men. Br J Urol 2006;99:559–563.
6. Yossepowitch O. Digital rectal examination remains an im-portant screening tool for prostate cancer. Eur Urol 2008;54:483–484.
7. Carvalhal GF, Smith DS, Mager DE, et al. Digital rectal ex-amination for detecting prostate cancer at prostate specificantigen levles of 4ng/mL or less. J Urol 1999;161:835–839.
8. Gosselaar C, Roobol MJ, Roderick R, et al. Digital rectalexamination and the diagnosis of prostate cancer—a studybased on 8 years and three screenings within the EuropeanRandomized Study of Screening for Prostate Cancer(ERSPC), Rotterdam. Eur Urol 2009;55:139–147.
9. Bozeman CB, Carver BS, Caldito G, et al. Prostate cancer inpatients with an abnormal digital rectal examination andserum prostate-specific antigen less than 4.0 ng/ml. J Urol2005;66:803–807.
10. Ramon J, Denis LJ. Prostate Cancer: Recent Results in CancerResearch. Springer, Berlin, Heidelberg, New York, 2007.
11. Gosselaar C, Roobol MJ, Roemeling S, et al. Screening forprostate cancer at low PSA range: The impact of digitalrectal examination on tumor incidence and tumor charac-teristics. Prostate 2006;67:154–161.
12. Catalona WJ, Richie JP, Ahmann FR, et al. Comparison ofdigital rectal examination and serum prostate specific anti-gen in the early detection of prostate cancer: Results of amulticenter clinical trial of 6,630 men. J Urol 1994;151:1308–1309.
13. Smith DS, Catalona WJ, Herschman JD. Longitudinalscreening for prostate cancer with prostate-specific antigen.J Am Med Assoc 1996;276:1309–1315.
14. Dario P, Bergamasco M. An advanced robot system for au-tomated diagnostic tasks through palpation. IEEE TransBiomed Eng 1988;35:118–126.
15. Bicchi A, Canepa G, Rossi DD, et al. A sensorized minimallyinvasive surgery tool for detecting tissutal elastic properties.In Proceeding of the IEEE International Conference onRobotics and Automation, Minneapolis, April, 1996, pp. 884–888.
16. Scilingo EP, Rossi DD, Bicchi A, et al. Haptic display forreplication of rheological behavior of surgical tissues:Modelling, control and experiments. In Proceeding of theASME Dynamics, Systems and Control Division. 1997, pp.173–176.
17. Ahn B, Kim J. Measurement and characterization of softtissue behavior with surface deformation and force responseunder large deformations. Med Image Anal 2010;14:138–148.
856 AHN ET AL.

18. Tiziana SL, Ornella C, Silke K, et al. Mechanical properties ofsingle living cells encapsulated in polyelectrolyte matrixes.J Biotechnol 2006;124:723–731.
19. Ahn B, Kim J, Lorenzo I, et al. Mechanical property char-acterization of prostate cancer using a minimally motorizedindenter in an ex vivo indentation experiment. Urology2010;76:1007–1011.
20. Schroder EH, Hermanck P, Denis L, et al. The TNM classi-fication of prostate cancer. Prostate 1992;4 (Suppl):129–138.
21. Nava A, Mazza E, Furrer M, et al. In vivo mechanical char-acterization of human liver. Med Image Anal 2008;12:203–216.
22. Rosen J, Brown JD, De S, et al. Biomechanical properties ofabdominal organs in vivo and postmortem under compres-sion loads. J Biomech Eng 2008;130:1–17.
23. Valtorta D, Mazza E. Dynamic measurement of soft tissueviscoelastic properties with a torsional resonator device.Med Image Anal 2005;9:481–490.
Address correspondence to:Jung Kim, Ph.D.
Department of Mechanical EngineeringSchool of Mechanical, Aerospace and Systems Engineering
Korea Advanced Institute of Science and Technology373-1 Guseong-dong
Daejeon, 305-701Korea
E-mail: [email protected]
Abbreviations Used
DRE¼digital rectal examinationE¼ elastic modulus (Young’s modulus)
PSA¼prostate-specific antigen
MECHANICAL PROPERTY MAP FOR DIAGNOSIS OF PROSTATE CANCER 857