Embed Size (px)
Citation preview

User’s Manual ENGLISH E
YAMAHA SCARA ROBOT
E28-Ver. 2.03
LONG ZYK-X series


Before using the robot (Be sure to read the following)
Our sincere thanks for your purchase of YAMAHA YK-X Long Z series SCARArobot.
The YK-X Long Z series robot has a longer Z-axis stroke than the standard YK-X series and the Z-axis has greater rigidity so the Y-axis arm tip also has moreweight than the standard YK-X series.The following parameter settings must therefore be changed from the standardYK-X series. The payload is also smaller than the standard YK-X series. See “2Robot Parameters” in 1 Chapter for more details.
q Tip weight (Kg) Robot parameter No. 1
w Z-axis acceleration coefficient (%) Axis parameter No. 1
e + soft limit Axis parameter No. 2 (No. 3)
r Max. motor rotation (rpm) Axis parameter No. 35 (No. 37)
t stroke end origin torque (%) Axis parameter No. 47
Numbers in parentheses are parameter numbers used for the RCX40 robot con-troller.
! CAUTION
Setting the above parameters incorrectly may cause an early end to drive sec-tion service life or breakage, and lead to residual vibration during positioning.

MEMO

Introduction
This instruction manual is intended for the following models of YAMAHA YK-XLong Z series robots.
Model
YK250X, YK350X, YK400X
YK500X, YK600X
YK700X, YK800X, YK1000X
Maximum Z-axis stroke
300mm
600mm
800mm
This instruction manual describes the safety measures, handling, adjustment andmaintenance of YK-X Long Z series robots for correct, safe and effective use. Besure to read this manual carefully before installing the robot. Even after you haveread this manual, keep it in a safe and convenient place for future reference.
This instruction manual should be used with the robot and considered an integralpart of it. When the robot is moved, transferred or sold, send this manual to thenew user along with the robot. Be sure to explain to the new user the need to readthrough this manual.
For the operating or maintenance procedures not described in this manual, pleaserefer to the separate “YK-X Series User’s Manual”. Also refer to the “YK-XSeries User’s Manual” for precautions and warranty. If there are any obscurepoints in handling the robot, be sure to contact YAMAHA sales office or dealer.
For details on specific operation and programming of the robot, refer to the sepa-rate “YAMAHA Robot Controller User’s Manual”.
NOTES
• The contents of this manual are subject to change without prior notice.• Information furnished by YAMAHA in this manual is believed to be reliable.
However, if you find any part unclear or inaccurate in this manual, pleasecontact YAMAHA sales office or dealer.
YAMAHA MOTOR CO., LTD.IM Operations

MEMO

CONTENTS
CHAPTER 1 Functions
1 Robot Manipulator ..................................................................1-1
2 Robot Parameters ..................................................................1-32-1 Parameters when shipped ............................................................... 1-3
2-2 Other parameter settings ................................................................. 1-6
2-3 Cautions when using Long Z series robots ...................................... 1-8
CHAPTER 2 Installation
1 Moving the robot .....................................................................2-1
CHAPTER 3 Adjustment
1 Origin position sticker attachment position .............................3-1
2 Adjusting the Z-axis machine reference .................................3-2
3 Removing the robot covers .....................................................3-33-1 Removing the Y-axis arm upper cover (YK250X toYK400X) ........... 3-5
3-2 Removing the Y-axis arm upper cover (YK500X toYK1000X) ......... 3-7
CHAPTER 4 Periodic Inspecition
1 Greasing the Z-axis Balls Screws ...........................................4-1
CHAPTER 5 Specifications
1 Robot Manipulator ..................................................................5-11-1 Basic specifications.......................................................................... 5-1
1-2 External view and dimensions ......................................................... 5-4

MEMO

CHAPTER 1
Functions
1 Robot Manipulator ..................................................................1-1
2 Robot Parameters ..................................................................1-32-1 Parameters when shipped ............................................................... 1-3
2-2 Other parameter settings ................................................................. 1-6
2-3 Cautions when using Long Z series robots ...................................... 1-8

MEMO

1-1
CHAPTER 1 Functions
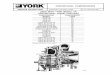
1 Robot ManipulatorFig.1-1 and Fig.1-2 on the subsequent pages show part names and functions ofeach robot model.
Fig. 1-1 YK250X to YK400X Long Z model
User tubing 2 (φ4 red)
User tubing 3 (φ4 blue)
D-sub connector for user wiring (No. 1 to 10 usable)
User tubing 2 (φ4 red)
User tubing 1 (φ4 black)
D-sub connector for user wiring (No. 1 to 10 usable)
User tubing 3 (φ4 blue)
M4 Ground terminal
User tubing 1 (φ4 black)
Ball screw
Warning label 1
Warning label 2
Machine harness
R-axis motor
Y-axis motor
Y-axis speed reduction gear
Y-axis mechanical stopper
Z-axis motor
Z-axis, R-axispulley, belt
Y-axis arm
Linear bushing
Linear shaft
End effector attachment
X-axis arm
X-axis mechanical stopper
X-axis speed reduction gear
Warning label 3
X-axis motor
Robot cable
Serial No. label
R-axis speed reduction gear

1-2
CHAPTER 1 Functions
Fig. 1-2 YK500X to YK1000X Long Z model
User tubing 2 (φ6 red)
User tubing 3 (φ6 blue)
D-sub connector for user wiring (No. 1 to 20 usable)
User tubing 1 (φ6 black)
User tubing 3 (φ6 blue)User tubing 2 (φ6 red)User tubing 1 (φ6 black)
D-sub connector for user wiring (No. 1 to 20 usable)
M4 Ground terminal
Robot cable
Serial No. label
X-axis mechanical stopper X-axis adjustable
mechanical stopper
Eye bole installation threaded hole
Machine harness
Ball screw
Warning label 1 (same on opposite side)
Warning label 2 (same on oppsite side)
Z-axis, R-axispulley, belt
R-axis speed reduction gear
End effector attachment
Leaner bushing
Linear shaft
Y-axis arm
X-axis arm
Y-axis speed reduction gear
Z-axis motor
R-axis motor
Y-axis motor
X-axis speed reduction gear
X-axis motor
Warning label 3

1-3
CHAPTER 1 Functions
2 Robot Parameters
2-1 Parameters when shipped
Some parameters on the Long Z series robot have been changed from the stand-ard specifications prior to shipping.Information on parameter changes and cautions when using the robot with thesechanged robot parameters are listed below.
To purchasers of this robotAt this time our sincere thanks for your purchase of our robot. This robot is cus-tom-manufactured so some parameter settings are different from the standardrobot. Be sure to check the following points before attempting to use the robot.
Operating precautionsMake a backup of the parameters. (When using YAMAHA communication soft-ware VIP, POPCOM or optional memory card (S-DRCX) or FDD unit (QRCX).For further information, see the instruction manual that comes with the unit.
! CAUTION
Resetting the parameters deletes previous parameter entries. If necessarydownload the backup parameters again.
Parameter changesParameters have been changed as follows. Blank portions indicate standard speci-fications are used.
(1) YK250X to YK400X (300mm Z-axis stroke models)
Robot No.
2100
2101
2102
q Robot No.
Robot model
YK250X
YK350X
YK400X
Set to the following robot No. of the standard robots with the same arm length.
Parameter No. Name
PRM2 (PRM3)
PRM35 (PRM37)
w Axis setting changes
+ soft limit
Max. motor rotation
PRM47 Stroke end origin torque
Changes
X-axis Y-axis Z-axis R-axis
409600
3000
75Numbers in parentheses are parameter numbers used for the RCX40 robot controller.

1-4
CHAPTER 1 Functions
(2) YK500X, YK600X (600mm Z-axis stroke models)
Robot No.
2110
2111
q Robot No.
Robot model
YK500X Z300
YK600X Z300
Set to the following robot No. of the standard robots of Z300 stroke with the same arm length.
Parameter No. Name
PRM2 (PRM3)
PRM35 (PRM37)
PRM47
w Axis setting changes
+ soft limit
Max. motor rotation
stroke end origin torque
Changes
X-axis Y-axis Z-axis R-axis
491520
3000
55Numbers in parentheses are parameter numbers used for the RCX40 robot controller.
(3) YK700X, YK800X, YK1000X (800mm Z-axis stroke models)
Robot No.
2112
2113
2114
q Robot No.
Robot model
YK700X Z400
YK800X Z400
YK1000X Z400
Set to the following robot No. of the standard robots of Z400 stroke with the same arm length.
Parameter No. Name
PRM2 (PRM3)
PRM35 (PRM37)
PRM47
w Axis setting changes
+ soft limit
Max. motor rotation
stroke end origin torque
Changes
X-axis Y-axis Z-axis R-axis
655360
3000
65Numbers in parentheses are parameter numbers used for the RCX40 robot controller.
NOTE
(1) When the Z-axis stroke is shorter than the maximum stroke, change the Z axis +software limit to a figure matching the shorter stroke.
(2) Change the stroke end origin point torque after performing the following opera-tions. These parameters cannot be changed unless the robot is in emergency stop.
! CAUTION
To ensure safety, most RCX40 controller or QRCX controller parameters listedin this manual cannot be changed or referred to by normal operating proce-dures. So changing these parameters by mistake could have major catastrophiceffects on robot operation and place the operator in dangerous situations. Useplenty of caution when you must change these parameters. Change these pa-rameters by either of two methods listed next.

1-5
CHAPTER 1 Functions
[Operation]
Operating from the MPB1) Press the F 1 key (Parameter) while in SYSTEM mode.
The parameter mode screen appears.
Parameter mode
2) While holding down the UPPER key, simultaneously press the F 10 key (Pass-
word) and then the P key.
3) Press the key to finish entries.
The above procedure allows you to change the special parameters just as in nor-mal parameter setting.
Changing the parameter backup fileYou can change parameters by directly entering figures in the parameter backupfile with an editor and then loading these figures into the controller.A minimum of safety protective functions (such as disabling entry on certainrobot types or setting upper/lower limits on entries) are in effect when operatingfrom the MPB to ensure safety, but there are no such restrictions when changingfrom the parameter backup file so use caution.
! CAUTION
Please acknowledge beforehand that YAMAHA can accept no liability from prob-lems arising due to changes made to parameters that are not specified in thismanual.
SYSTEM>PARAM V7.01X
Robot = YK250X
D1=M1: a YK250X D5=M5:no axis
D2=M2: a YK250X D6=M6:no axis
D3=M3: a YK250X
D4=M4: a YK250X
ROBOT AXIS

1-6
CHAPTER 1 Functions
2-2 Other parameter settings
The Long Z series robot has a longer Z-axis stroke than the standard YK-X seriesso the Y-axis arm tip has greater weight. Therefore, the following parameter set-tings must be changed from the standard YK-X series settings. The payload forthe Long Z series is also smaller than the standard YK-X series.
(1)YK250X to YK400X
Parameter No. Name
PRM1
q Axis setting changes
Tip weight Load mass +1
Setting (Kg)
Parameter No. Name
PRM1
w Z-axis setting change
Acceleration coefficient M3Make settings as shown in the table below according to Z-axis stroke and load mass.
Setting (%)
100
80
70
100
70
60
Load mass (Kg)Acceleration coefficient M3 (%)
200mm Z-axis 250mm Z-axis 300mm Z-axis
0
1
2
100
80
70
(2)YK500X, YK600X
Parameter No. Name
PRM1
q Axis setting changes
Tip weight Load mass +5
Setting (Kg)
Parameter No. Name
PRM1
w Z-axis setting change
Acceleration coefficient M3Make settings as shown in the table below according to Z-axis stroke and load mass.
Setting (%)
Load mass (Kg)Acceleration coefficient M3 (%)
400mm Z-axis 500mm Z-axis 600mm Z-axis
0
1
2
3
4
5
70
70
70
70
70
80
70
70
70
70
60
70
70
70
70
70
50
40

1-7
CHAPTER 1 Functions
(3)YK700X to YK1000X
Parameter No.
PRM1
q Axis setting changes
Tip weightMake settings as shown in the table below according to Z-axis storke.
Name Setting (Kg)
Z-axis storke
500mm
600mm
700mm
800mm
Tip weight (kg)
Load mass +5
Load mass +5
Load mass +6
Load mass +7
PRM1
w Z-axis setting change
Parameter No. Name
Acceleration coefficient M3Make settings as shown in the table below according to Z-axis stroke and load mass.
Setting (%)
Load mass (Kg)Acceleration coefficient M3 (%)
500mm Z-axis 600mm Z-axis 700mm Z-axis
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
100
90
70
70
60
60
60
70
70
80
80
80
80
100
100
100
100
80
60
50
50
60
60
50
70
70
80
70
70
80
100
100
80
60
60
50
40
40
40
40
50
50
60
60
70
80
100
Not usable
800mm Z-axis
70
60
60
50
40
40
30
30
40
40
50
60
60
80
Not usable
Not usable
! CAUTION
Setting the above parameters incorrectly may cause an early end to drive sec-tion service life or breakage, and lead to residual vibration during positioning.

1-8
CHAPTER 1 Functions
2-3 Cautions when using Long Z series robots
q When the center-of-gravity of the load is offset from the R-axis center, theacceleration on the X-axis, Y-axis and R-axis must be lowered according tothe description of “6-1 R-axis tolerable moment of inertia and accelerationcoefficient” in Chapter 6 in the standard YAMAHA YK-X series SCARArobot user’s manual.
w Residual vibration may sometimes occur in Z-axis operation when the X-axis, Y-axis or R-axis rotates while the Z-axis is lowered or when load center-of-gravity is offset. If such vibration occurs, lower the acceleration coeffi-cients on each axis.
e Vibration may occur during movement at low speed due to the Z-axis posi-tion. Change the speed and acceleration to suppress this vibration.
r Residual vibration may occur when the arch position is increased by archmotion.

CHAPTER 2
Installation
1 Moving the robot .....................................................................2-1

MEMO

2-1
CHAPTER 2 Installation
1 Moving the robot
WARNING
Serious injury may occur if the robot falls and pins someone under it.• Do not allow any part of your body to enter the area beneath the robot
during work.• Always wear a helmet, safety shoes and gloves during work.
To check the mass of each robot, refer to “1-1 Basic specifications” in Chapter 4.To move the Long Z series robots safely, follow the description of “2-3 Movingthe robot” in the standard YAMAHA YK-X series SCARA robot user’s manual.Since the Z-axis is longer and heavier than the standard models, be careful tokeep balance when moving the robot.

2-2
MEMO

CHAPTER 3
Adjustment1 Origin position sticker attachment position .............................3-1
2 Adjusting the Z-axis machine reference .................................3-2
3 Removing the robot covers .....................................................3-33-1 Removing the Y-axis arm upper cover (YK250X toYK400X) ........... 3-5
3-2 Removing the Y-axis arm upper cover (YK500X toYK1000X) ......... 3-7

MEMO

3-1
CHAPTER 3 Adjustment
1 Origin position sticker attachment position
Refer to the origin sticker locations below only when the mark method is used forabsolute reset.An origin position sticker is attached to the robot arm joint sections when shippedfrom the factory. The R-axis origin sticker positions for the YK500X to YK1000Xare different from standard models as shown in Fig. 3-1. Refer to this drawingwhen performing absolute reset or when changing the origin position and attach-ing a new origin position sticker. The attachment position for the X-axis and theY-axis origin position stickers is the same as for standard models, so refer to Figs.4-5 to 4-7 in Chapter 4 of the standard YAMAHA YK-X series SCARA robotuser’s manual.
Fig. 3-1
Details of part B
Origin position
Origin position
B

3-2
CHAPTER 3 Adjustment
2 Adjusting the Z-axis machine reference
Refer to the caution items and procedures for standard models in “3-3 Adjustingthe Z-axis machine reference” of the standard YAMAHA YK-X series SCARArobot user’s manual. Adjustment position L is shown in Fig. 3-2. Dimension L islisted in Table 3-1.See “4 3 Removing the robot covers” for details on detaching and reinstalling therobot covers.
L
10mm
15mm
Robot model
YK250X, YK350X, YK400X
YK500X, YK600X
YK700X, YK800X, YK1000X 15mm
Table 3-1
Fig. 3-2
Linear bushing
Linear shaft
L

3-3
CHAPTER 3 Adjustment
3 Removing the robot covers
Use the following procedure when detaching and reinstalling the robot coversduring maintenance of the robot.
1) Prepare the required tools• Hex wrench set• Phillips-head screwdrivers
2) Turn off the controller.
3) Place a sign showing “Work in progress!” to prevent others from operatingthe controller switch.
4) Enter the safeguard enclosure.
5) Remove the particular covers while referring to Figs. 3-3 to 3-5. The screwsused to attach each cover are shown in Tables 3-2 to 3-4. (When using maxi-mum Z stroke specs.)
6) See Sections 3-1 and 3-2 for instructions on removing the Y-axis arm uppercover.
Cover name
Base rear cover
Base front cover
Y-axis arm upper cover
Cover 1
Cover 2
Screw No.
q
w
e
r
t
y
u
Screw size
M4×6
M4×6
M3×6
M3 washer
M3×10
M3×16
M4×6
M4×6
Q'ty
4
4
2
2
2
4
6
Table 3-2 YK250X, YK350X, YK400X (See Fig 3-3.)
Cover name
Base rear cover 1
Base rear cover 2
Base front cover
Y-axis arm top cover
Y-axis arm upper cover
Y-axis arm under cover
Cover 1
Cover 2
Cover 3
Screw No.
q
w
e
r
t
y
u
i
o
!0
Screw size
M4×6
M4×6
M4×6
M4×6
M3×6
M3 Washer
M3×50
M4×6
M4×6
M4×6
M4×6
Q'ty
8
4
8
2
4
4
4
3
2
6
Table 3-3 YK500X, YK600X (See Fig 3-4.)

3-4
CHAPTER 3 Adjustment
Cover name
Base rear cover 1
Base rear cover 2
Base front cover
Y-axis arm top cover
Y-axis arm upper cover
Y-axis arm under cover
Cover 1
Cover 2
Cover 3
Screw No.
q
w
e
r
t
y
u
i
o
!0
Screw size
M4×6
M4×6
M4×6
M4×8
M4×6
M4 Washer
M4×50
M4×6
M4×6
M4×6
M4×6
Q'ty
8
4
4
2
4
4
4
5
8
8
Table 3-4 YK700X to YK1000X (See Fig 3-5.)

3-5
CHAPTER 3 Adjustment
3-1 Removing the Y-axis arm upper cover (YK250X toYK400X)
While referring to Fig. 3-3, remove the Y-axis upper cover as follows.
1) Turn off the controller.
2) Place a sign showing “Work in progress!” to prevent others from operatingthe controller switch.
3) Remove the base front cover and the base rear cover.
4) Remove the machine harness FG wire round terminals. (2 pcs)
5) Detach the user air tubes 1 to 3 from the air coupler.The color of the air tube matches the air coupler color.
6) Remove the YM, ZM, YP, ZP, RP, ZBK, FG and IO connectors. Remove theD-sub connector from the cover.
7) Loosen the cap connector on the base and remove it from the base.
8) Draw out the machine harness from the hole in the base.Take special care at this time not to damage the connectors, wiring and tub-ing.
9) Remove the screws securing the Y-axis arm upper cover.
10) Remove the Y-axis arm upper cover and perform the necessary maintenance.
11) Use the reverse of the above procedure when reinstalling the cover.Be sure not to forget to reinstall the FG wire, reconnect the air tubes andclamp the harness. The cap connector that clamps the harness should be tightproperly so that the harness will not slide around even if twisted.

3-6
CHAPTER 3 Adjustment
Fig. 3-3
One FG connector is installed.
wM4×6qM4×6
rM3×10
tM3×16
eM3×6
yM4×6
uM4×6
M3 Washer
User tubing 2 (φ4 red)
User tubing 1 (φ4 black)D-sub connector for user wiring
User tubing 3 (φ4 blue)
Machine harness
YM, ZM, RM connector
YP, ZP, RP, ZBK,FG, IO connector
Base rear coverBase front cover
FG wire round terminals
Cap connector
Y-axis arm upper cover
Cover 2
Cover 1
DO not remove these bolts.
Cover 3
Viewed front direction A

3-7
CHAPTER 3 Adjustment
3-2 Removing the Y-axis arm upper cover (YK500X toYK1000X)
While referring to Figs. 3-4 and 3-5, remove the Y-axis upper cover as follows.
1) Turn off the controller.
2) Place a sign showing “Work in progress!” to prevent others from operatingthe controller switch.
3) Remove the base front cover and base rear cover 1.
4) Remove the machine harness FG wire round terminals. (2 pcs)
5) Detach the user air tubes 1 to 3 from the air coupler.The color of the air tube matches the air coupler color.
6) Remove the YM, ZM, YP, ZP, RP, ZBK, FG and IO connectors. Remove theD-sub connector from the cover.
7) Loosen the cap connector on the base and remove it from the base.
8) Draw out the machine harness from the hole in the base.Take special care at this time not to damage the connectors, wiring and tub-ing.
9) Remove the screws securing the Y-axis arm upper cover.
10) Remove the Y-axis arm upper cover and perform the necessary maintenance.
11) Use the reverse of the above procedure when reinstalling the cover.Be sure not to forget to reinstall the FG wire, reconnect the air tubes andclamp the harness. The cap connector that clamps the harness should be tightproperly so that the harness will not slide around even if twisted.

3-8
CHAPTER 3 Adjustment
Fig. 3-4
yM3×50
uM4×6
wM4×6
qM4×6
tM3×6M3 Washer
oM4×6
!0M4×6
iM4×6
One FG connector is installed.
rM4×6
eM4×6
User tubing 3 (φ6 blue)
User tubing 2 (φ6 red)User tubing 1 (φ6 black)
D-sub connector for user wiring
Machine harness
Base rear cover 1
Y-axis arm under cover
Base rear cover 2Do not remove these bolts.
Cover 3
Cover 1
Cover 2
Y-axis arm upper cover
Cap connector
YM, ZM, RM, FG, IO connector
YP,ZP, RP, ZBK connector
FG wire round terminalsBase front cover
X-axis arm top cover
Viewed front direction A

3-9
CHAPTER 3 Adjustment
Fig. 3-5
tM4×6
oM4×6
!0M4×6
rM4×8
yM4×50uM4×6
qM4×6
M4 Washer
iM4×6
One FG connector is installed.
User tubing 3 (φ6 blue)
User tubing 2 (φ6 red)User tubing 1 (φ6 black)
D-sub connector for user wiring
Machine harness
Base rear cover 1
Y-axis arm under cover
Base rear cover 2
Do not remove these bolts.
Cover 3
Cover 1
Cover 2
Y-axis arm upper cover
Cap connector
YM, ZM, RM, FG, IO connector
YP,ZP, RP, ZBK connector FG wire round terminalsBase front cover
X-axis arm top cover
Viewed front direction A
wM4×6
eM4×6

3-10
MEMO

CHAPTER 4
Periodic Inspecition
1 Greasing the Z-axis Balls Screws ...........................................4-1

MEMO

4-1
CHAPTER 4 Periodic Inspecition
1 Greasing the Z-axis Balls Screws
Long Z-axis series robots have a longer Z-axis stroke than the standard robots.This means a long section on the Z-axis is subjected to movement at maximumspeed, making for rough operating conditions. The Z-axis ball screws thereforehave to be greased every 2 months.Always use LRL3 grease (NSK) when greasing long Z-axis ball screws of theYK500 to YK1000X long Z-axis series robots.See “4. 6 Month Inspections” in the YK-X series robot user’s manual when greasingother sections.
WARNING
Grease the Z-axis ball screws every 2 months using the specified grease.Failure to apply grease might drastically shorten the ball screw servicelife.

4-2
MEMO

CHAPTER 5
Specifications
1 Robot Manipulator ..................................................................5-11-1 Basic specifications.......................................................................... 5-1
1-2 External view and dimensions ......................................................... 5-4

MEMO

5-1
CHAPTER 5 Specifications
1 Robot Manipulator
1-1 Basic specifications
YK250X
125mm
±115°125mm
±99°300mm
±180°200W
100W
100W
100W
4.0m/s
0.6m/s
1020°/s±0.01mm
±0.01mm
±0.005°2kg
10
φ4×3
16kg 16kg 16kg
YK350X
225mm
±115°125mm
±140°300mm
±180°200W
100W
100W
100W
5.0m/s
0.6m/s
1020°/s±0.01mm
±0.01mm
±0.005°2kg
10
φ4×3
YK400X
225mm
±115°175mm
±134°300mm
±180°200W
100W
100W
100W
5.7m/s
0.6m/s
1020°/s±0.01mm
±0.01mm
±0.005°2kg
10
φ4×3
Arm length
Rotation angle
Arm length
Rotation angle
Stroke
Rotation angle
X-axis
Y-axis
Z-axis
R-axis
XY resultant
Z-axis
R-axis
XY-axis
Z-axis
R-axis
X-axis
Y-axis
Z-axis
R-axis
Axis specifi-cation
Motor
Maximum speed
Repeatability *1
Payload *3
R-axis tolerable moment of inertia *2
User wiring
User tubing
Travel limit
Robot cable
Weight
1. Soft limit 2. Mechanical limit (XYZ axes)
3.5m (option: 5m, 10m )
Robot model
*1 At constant ambient temperature (XY)*2 There are limits to acceleration coefficient settings.*3 There are limits to manipulator tip mass and Z-axis acceleration settings.
0.05kgm2 (0.5kgfcms2)

5-2
CHAPTER 5 Specifications
YK500X
250mm
±120°250mm
±139°600mm
±180°400W
200W
200W
100W
4.9m/s
1.0m/s
876°/s±0.02mm
±0.01mm
±0.005°5kg
20
φ6×3
33kg 33kg
YK600X
350mm
±120°250mm
±145°600mm
±180°400W
200W
200W
100W
5.6m/s
1.0m/s
876°/s±0.02mm
±0.01mm
±0.005°5kg
20
φ6×3
Arm length
Rotation angle
Arm length
Rotation angle
Stroke
Rotation angle
X-axis
Y-axis
Z-axis
R-axis
XY resultant
Z-axis
R-axis
XY-axis
Z-axis
R-axis
Axis specifi-cation
Motor
Maximum speed
Repeatability *1
Payload *3
R-axis tolerable moment of inertia *2
User wiring
User tubing
Travel limit
Robot cable
Weight
1. Soft limit 2. Mechanical limit (XYZ axes)
3.5m (option: 5m, 10m )
Robot model
*1 At constant ambient temperature (XY)*2 There are limits to acceleration coefficient settings.*3 There are limits to manipulator tip mass and Z-axis acceleration settings.
0.12kgm2 (1.2kgfcms2)
X-axis
Y-axis
Z-axis
R-axis

5-3
CHAPTER 5 Specifications
YK700X
350mm
±120°350mm
±145°800mm
±180°800W
400W
400W
200W
6.2m/s
1.0m/s
600°/s±0.02mm
±0.01mm
±0.005°
20
φ6×3
63kg 64kg 65kg
YK800X
450mm
±120°350mm
±145°800mm
±180°800W
400W
400W
200W
6.6m/s
1.0m/s
600°/s±0.02mm
±0.01mm
±0.005°
20
φ6×3
YK1000X
550mm
±120°450mm
±145°800mm
±180°800W
400W
400W
200W
6.9m/s
1.0m/s
600°/s±0.02mm
±0.01mm
±0.005°
20
φ6×3
Arm length
Rotation angle
Arm length
Rotation angle
Stroke
Rotation angle
X-axis
Y-axis
Z-axis
R-axis
XY resultant
Z-axis
R-axis
XY-axis
Z-axis
R-axis
Axis specifi-cation
Motor
Maximum speed
Repeatability *1
Payload *3
R-axis tolerable moment of inertia *2
User wiring
User tubing
Travel limit
Robot cable
Weight
1. Soft limit 2. Mechanical limit (XYZ axes)
3.5m (option: 5m, 10m )
Robot model
*1 At constant ambient temperature (XY)*2 There are limits to acceleration coefficient settings.*3 There are limits to manipulator tip mass and Z-axis acceleration settings.
0.32kgm2 (3.2kgfcms2)
Z-axis 500mm Stroke : 15Kg
Z-axis 600mm Stroke : 15Kg
Z-axis 700mm Stroke : 14Kg
Z-axis 800mm Stroke : 13Kg
X-axis
Y-axis
Z-axis
R-axis

5-4
CHAPTER 5 Specifications
1-2 External view and dimensions
A maximum Z-axis stroke model is illustrated below.
Fig. 5-1 YK250X 300mm Z-axis stroke model
0
45
0
86
R28
300
75
Z-axis lower end mechanical stopper position
125112.237 165
D-sub connector for user wiring(No. 1 to 10 usable)
74
12555
R50
55
63
User tubing 2 (φ4 red)
User tubing 3 (φ4 blue)
User tubing 1 (φ4 black)
Use M8 bolt for installation
120
100
120
140
45
15135
165
4-φ9
456
559
720
φ10
454
250
203.5
644
244251
170184201210
258
276
φ5 10
10 R22 56
Z-axis upper end mechanical stopper position3641
φ12 0-0.018
124±2

5-5
CHAPTER 5 Specifications
Working envelope
X-axis mechanical stopper position
115°
115°
R250
R125
132°
132°
R250
48°48°
300
125
R80
99°
99°
Manipulator interference area
21° 21°
99°
99°
300
125
R80
R125
Manipulator interference area
User tubing 2 (φ4 red)
User tubing 1 (φ4 black)
D-sub connector for user wiring (No. 1 to 10 usable)
User tubing 3 (φ4 blue)
M4 ground terminal
30 120
15
55
11.5
M8×1.25 Depth15
29
1731
38
4747
124
R22
Viewed from direction A
Viewed from direction B

5-6
CHAPTER 5 Specifications
Fig. 5-2 YK350X 300mm Z-axis stroke model
Use M8 bolt for installation
244251
User tubing 2 (φ4 red)
74120
112.237 165
125
100
120
140
45
15135
165
4-φ9
55
R50
User tubing 3 (φ4 blue)
D-sub connector for user wiring(No. 1 to 10 usable)
454
250
203.5
0
45
0
86
644
User tubing 1 (φ4 black)
55
R28
63
124±2
170184201210
258276
456
559
720
3641
φ5 10
10 R22 56
300
φ12 0-0.018
φ10
225
75
Z-axis upper end mechanical stopper position
Z-axis lower end mechanical stopper position

5-7
CHAPTER 5 Specifications
Working envelope
X-axis mechanical stopper position
User tubing 2 (φ4 red)
User tubing 1 (φ4 black) D-sub connector for user wiring (No. 1 to 10 usable)
User tubing 3 (φ4 blue)
M4 ground terminal
30 120
15
55
11.5
M8×1.25 Depth15
29
1731
38
4747
124
R22
115°
115°
R350R152
R125
132°
132° R
142 R350
R125
300
R80
R80
109° 109°
140°
140°
Manipulator interference area
R80
R80
116° 116°
300
Manipulator interference area
143°
143°
Viewed from direction A
Viewed from direction B

5-8
CHAPTER 5 Specifications
Fig. 5-3 YK400X 300mm Z-axis stroke model
Use M8 bolt for installation
244251
User tubing 2 (φ4 red)
74
12037 165
100
120
140
45
15135
165
4-φ9
55
R50
User tubing 3 (φ4 blue)
D-sub connector for user wiring(No. 1 to 10 usable)
454
250
203.5
0
45
0
86
644
User tubing 1 (φ4 black)
55
R28
63
124±2
170184201210
258276
456
559
720
3641
φ5 10
10 R22 56
300
φ12 0-0.018
φ10
225166.1
1757
5
Z-axis upper end mechanical stopper position
Z-axis lower end mechanical stopper position

5-9
CHAPTER 5 Specifications
User tubing 2 (φ4 red)
User tubing 1 (φ4 black)
D-sub connector for user wiring (No. 1 to 10 usable)
User tubing 3 (φ4 blue)
M4 ground terminal
30 120
1555
11.5
M8×1.25 Depth15
29
1731
38
4747
124
R22
132°
132°
R400
115°
115°
R400
R145
R175
R175
134°
134°
118° 118°300
R80R80
Manipulator interference area
300
R80
R80
120
202
125
134°
134°
86° 86°
Manipulator interference area
Working envelope
X-axis mechanical stopper position
Viewed from direction A
Viewed from direction B

5-10
CHAPTER 5 Specifications
Fig. 5-4 YK500X 600mm Z-axis stroke model
561
790
0 0
282
91
364
166 (Base size)
110
User tubing 2 (φ6 red)
User tubing 3 (φ6 blue)
D-sub connector for user wiring(No. 1 to 20 usable)
User tubing 1 (φ6 black)
73
65
57
65
4-φ11Use M10 bolt for installation
122.5
90
47 250 250
94R20
160
R80
R55
70
363
15
319
R200
54 20
36
2×2-M4×0.7Depth10 (Same on opposite side)
80 86
R31
9525
76
183±2
241
269
299310
350
675
974
1156
600
48 41
16
φ7
φ18 0-0.018
15
R32 57
φ16
12
8
Z-axis lower end mechanical stopper position
Z-axis upper end mechanical stopper position

5-11
CHAPTER 5 Specifications
20
D-sub connector for user wiring (No. 1 to 20 usable)
355573
53
0
M4 ground terminal
120°
R500
R250
120°
122°
R500
122°
R250
R175
129° 129°201
277
107
215
139°
139°
Manipulator interference area
R175
201
277
107
215
Manipulator interference area
139°
139°
35
10.5
27
73
R32
6060
157
158
52
2667
25
M12×1.75 Depth20
R68(a)
R95(b)
R104(c)
R104(c)R
95(b
)
R68(a)
129° 129°
User tubing 2 (φ6 red)User tubing 1 (φ6 black)
User tubing 3 (φ6 blue)
Working envelope
X-axis mechanical stopper positions (maximum working envelope)
Interference position(a) Base flange(b) Base rear side(c) Base
Viewed from direction A
Viewed from direction B

5-12
CHAPTER 5 Specifications
Fig. 5-5 YK600X 600mm Z-axis stroke model
561
0 0
282
91
364
166 (Base size)
110
User tubing 2 (φ6 red)
User tubing 3 (φ6 blue)
D-sub connector for user wiring(No. 1 to 20 usable)
User tubing 1 (φ6 black)
73
65
57
65
4-φ11Use M10 bolt for installation
122.5
90
47 250
94R20
160
R80
R55
70
363
15
319
R200
54 20
36
2×2-M4×0.7Depth10(Same on opposite side)
80 86
R31
9525
76
183±2
241
269
299310
350
675
974
1156
600
48 41
16
φ7
φ18 0-0.018
15
R32 57
φ16
350
800
12
Z-axis lower end mechanical stopper position
8
Z-axis upper end mechanical stopper position

5-13
CHAPTER 5 Specifications
20
D-sub connector for user wiring (No. 1 to 20 usable)
355573
53
0
35
10.527
73
R32
6060
157
158
52
2667
25M12×1.75 Depth20
R250
R600120°
R204
120°
145°145°
R250
R600
122°
147°147°
122°
R196
R133(c)
R107(a)
R78(b)
R98(a)
R124(c)
R70(b)
Interference position(a) Base flange(b) Base rear side(c) Base
Working envelope
Viewed from direction A
Viewed from direction B
M4 ground terminal
User tubing 2 (φ6 red)User tubing 1 (φ6 black)
User tubing 3 (φ6 blue)
X and Y-axis mechanical stopper positions (maximum working envelope)

5-14
CHAPTER 5 Specifications
Fig. 5-6 YK700X 800mm Z-axis stroke model
Use M12 bolt for installation
(Same on opposite side)
0 020
97
279
328
371
877
586
106
147350350
70 80
7575
93
180
106
R150
R20
4-φ14
126
58
D-sub connector for user wiring(No. 1 to 20 usable)
70
R106
R76
112
119.5
41
2×2-M4×0.7 Depth10
1375
54 20
298310
376
673
339
800
φ22 0-0.021
4550.5
7620
16
28 131
R26
φ20
1188
244
184±2
272
R40 102
φ8
12
8
Z-axis upper end mechanical stopper position
Z-axis lower end mechanical stopper position
User tubing 2 (φ6 red)
User tubing 1 (φ6 black)
User tubing 3 (φ6 blue)

5-15
CHAPTER 5 Specifications
120°
120°
R210
R700
R350
123°
R700123°
R350R199
145°145°
250
245
147°147°
245
250138° 138°
Manipulator interference area
Manipulator interference area
138° 138°
R125(b)
R89(a)
R98(c)
R114(b)
R78(a)
R98(c)
0
D-sub connector for user wiring (No. 1 to 20 usable)
5941
0
6179
4
M12×1.75 Depth20
6868
178
2910
R40
40
178
52
2670
25
83
Interference position(a) Base flange(b) Base rear side(c) Base
Viewed from direction A
Viewed from direction B
M4 ground terminal
User tubing 2 (φ6 red)User tubing 1 (φ6 black)
User tubing 3 (φ6 blue)
Working envelope
X and Y-axis mechanical stopper positions (maximum working envelope)

5-16
CHAPTER 5 Specifications
Fig. 5-7 YK800X 800mm Z-axis stroke model
Use M12 bolt for installation
(Same on opposite side)
0 020
97
279
328
371
877
586
106
147350
70 80
7575
93
180
106
R150
R20
4-φ14
126
58
D-sub connector for user wiring(No. 1 to 20 usable)
70
R76
112
119.5
41
2×2-M4×0.7 Depth10
1375
54 20
298310
376
673
339
800
φ22 0-0.021
4550.5
7620
16
28 131
R26
φ20
1188
244
184±2
272
R40 102
450
φ8Z-axis upper end mechanical stopper position
Z-axis lower end mechanical stopper position
812
User tubing 2 (φ6 red)User tubing 1 (φ6 black)
User tubing 3 (φ6 blue)

5-17
CHAPTER 5 Specifications
120°
120°
145°145°
R350
R800
R259
123° R
247
147°
123°
R800
147°
R350
R172(c)
R14
3(a)
R108(b)
R162(c)
R13
1(a)
96(b)
0
D-sub connector for user wiring (No. 1 to 20 usable)
5941
0
6179
4
M12×1.75 Depth20
6868
178
2910
R40
4017
8
52
2670
25
83
Interference position(a) Base flange(b) Base rear side(c) Base
Viewed from direction A
Viewed from direction B
M4 ground terminal
User tubing 2 (φ6 red)User tubing 1 (φ6 black)
User tubing 3 (φ6 blue)
Working envelope
X and Y-axis mechanical stopper positions (maximum working envelope)

5-18
CHAPTER 5 Specifications
Fig. 5-8 YK1000X 800mm Z-axis stroke model
Use M12 bolt for installation
(Same on opposite side)
020
97
279
328
371
877
588
147550
70 80
7575
93
180
106
R150
4-φ14
126
58
70
R76
112
119.5
450
0
106
41
2×2-M4×0.7 Depth10
1375
54 20
376
76
28 131
R26
665
298310339
800
φ22 0-0.021
4550.5
20
16
1188
244
184±2
272
R40 102
φ8
128
Z-axis upper end mechanical stopper position
Z-axis lower end mechanical stopper position
D-sub connector for user wiring(No. 1 to 20 usable)
User tubing 2 (φ6 red)User tubing 1 (φ6 black)
User tubing 3 (φ6 blue)

5-19
CHAPTER 5 Specifications
4
7961
0
4159
D-sub connector for user wiring (No. 1 to 20 usable)
0
M12×1.5 Depth20
6868
178
2910
R40
40
178
52
2670
25
83
Working envelope
X and Y-axis mechanical stopper positions (maximum working envelope)
145°
R1000120°
120°
145°R
315
R450
R450
147°
123°R300123°
R1000
147°
R230(c)
R165(b)
R20
5(a)
R187(a)
R149(b)
R215(c)
Interference position(a) Base flange(b) Base rear side(c) Base
Viewed from direction A
Viewed from direction B
M4 ground terminal
User tubing 2 (φ6 red)User tubing 1 (φ6 black)
User tubing 3 (φ6 blue)

User's Manual
May 2007Ver. 2.03 This manual is based on Ver. 2.03 of Japanese manual.
© YAMAHA MOTOR CO., LTD. IM Operations
SCARA Robot
All rights reserved. No part of this publication may be reproduced in any form without the permission of YAMAHA MOTOR CO., LTD.Information furnished by YAMAHA in this manual is believed to be reliable. However, no responsibility is assumed for possible inaccuracies or omissions. If you find any part unclear in this manual, please contact YAMAHA or YAMAHA sales representatives.
Series