Embed Size (px)
Citation preview
Robot Vision SS 2013 Matthias Rüther 1
710.088 ROBOT VISION 2VO 1KU
Matthias Rüther, Christian Reinbacher
Robot Vision SS 2013 Matthias Rüther 2
Administrative
VO: 12x Tuesday 14:30-16:00 HS i11
http://www.icg.tugraz.at/courses/lv710.088/infoNews: tu-graz.lv.robot_vision_ue
Exam: Written (02.07.2012) in last VO Oral Exam if Requested
KU: 33 Students registered 10 Groups of 3 students Target Effort: ~1week per student
Robot Vision SS 2013 Matthias Rüther 3
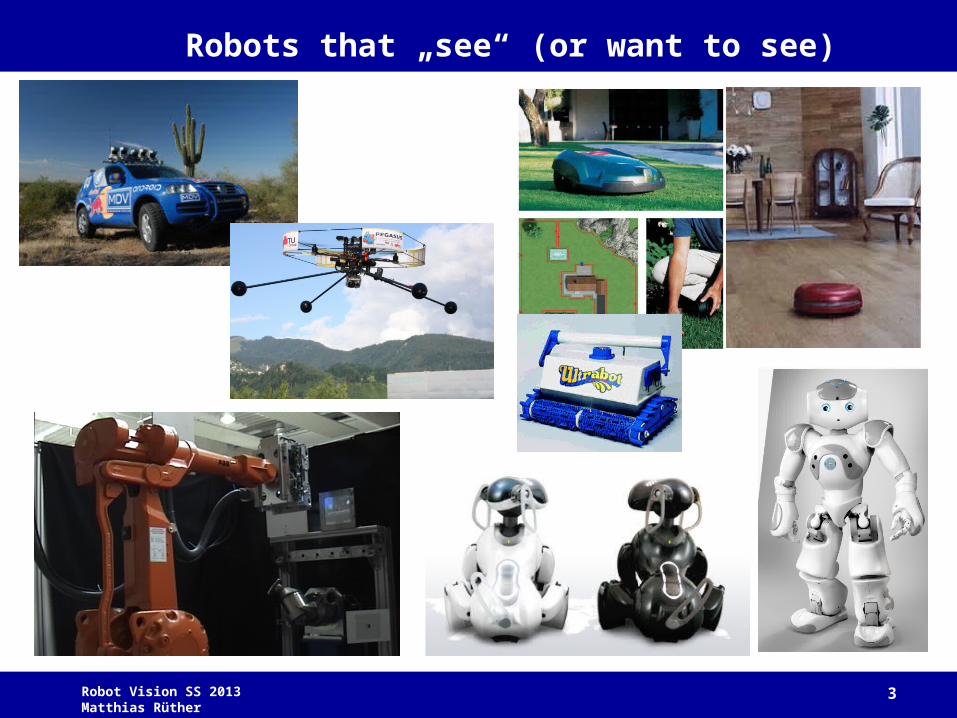
Robots that „see“ (or want to see)
Robot Vision SS 2013 Matthias Rüther 4
What does „seeing“ mean?
Acquire image(s)– Photon Sensor, Optics, Illumination
Transfer to Processor– Reliably, fast, real-time, long-distance, low noise
2D Image Processing– Feature Detection, Image Segmentation, Image Understanding, ...
Reconstruct 3D information– Geometry, Multi-View Geometry, Camera Geometry, Shape from X
Feedback and Manipulation – Robot Control, Kinematic Control, Robot Navigation, Visual Servoing
Robot Vision SS 2013 Matthias Rüther 5
Topics
Multiple View Geometry:– How to algebraically represent points/lines/planes
– How to define mappings on these
– How to estimate these Linear Algebra (vectors, matrices, matrix decompositions)
Hardware and Sensors– Cameras, light sources, optics, data transfer, processors
Depth Recovery– How to estimate/measure 3D information from images
RGBD Cameras, Lasers, Projector-Camera Systems, Multi-Cam Systems
Robotics– How to model static/mobile robots
Robot Vision– Visual Odometry, VSLAM, Robotic Metrology, Visual Servoing
Robot Vision SS 2013 Matthias Rüther 6
Literature
Hartley R., Zissermann A., Multiple View Geometry in Computer Vision, Cambridge, Second Edition.
Sebastian Thrun, Wolfram Burgard and Dieter Fox: Probabilistic Robotics
Lecture Slides
Web resources
Robot Vision SS 2013 Matthias Rüther 7
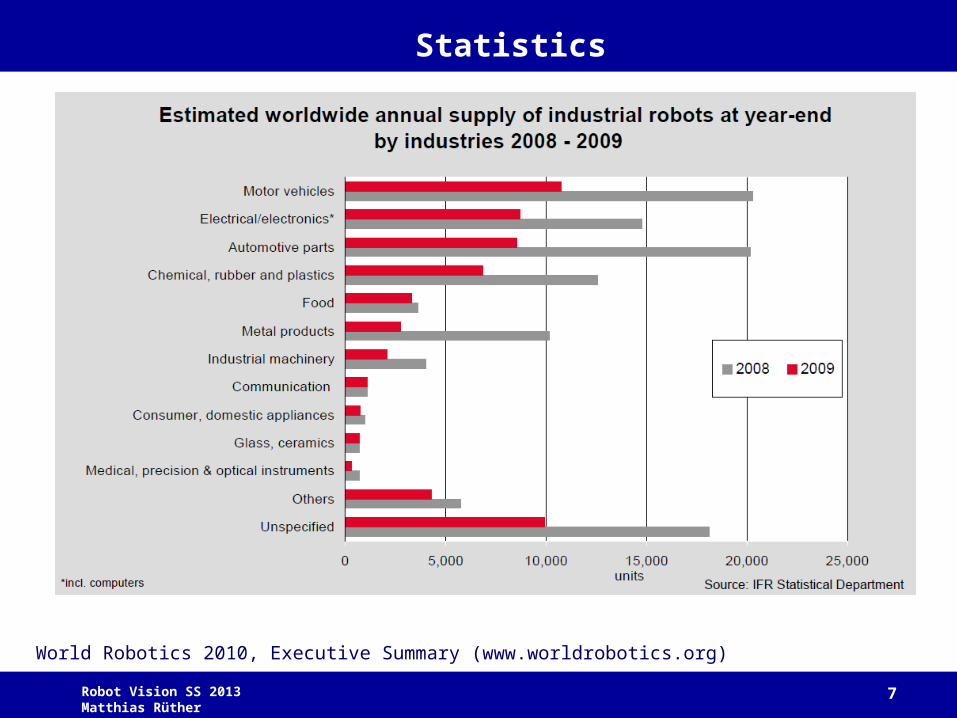
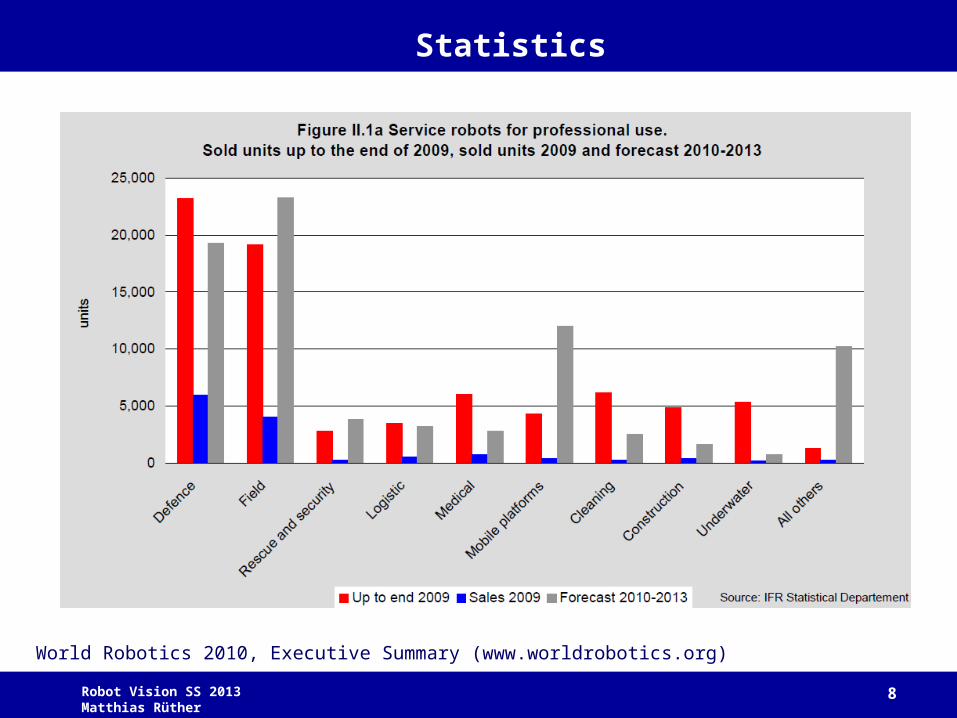
Statistics
World Robotics 2010, Executive Summary (www.worldrobotics.org)
Robot Vision SS 2013 Matthias Rüther 8
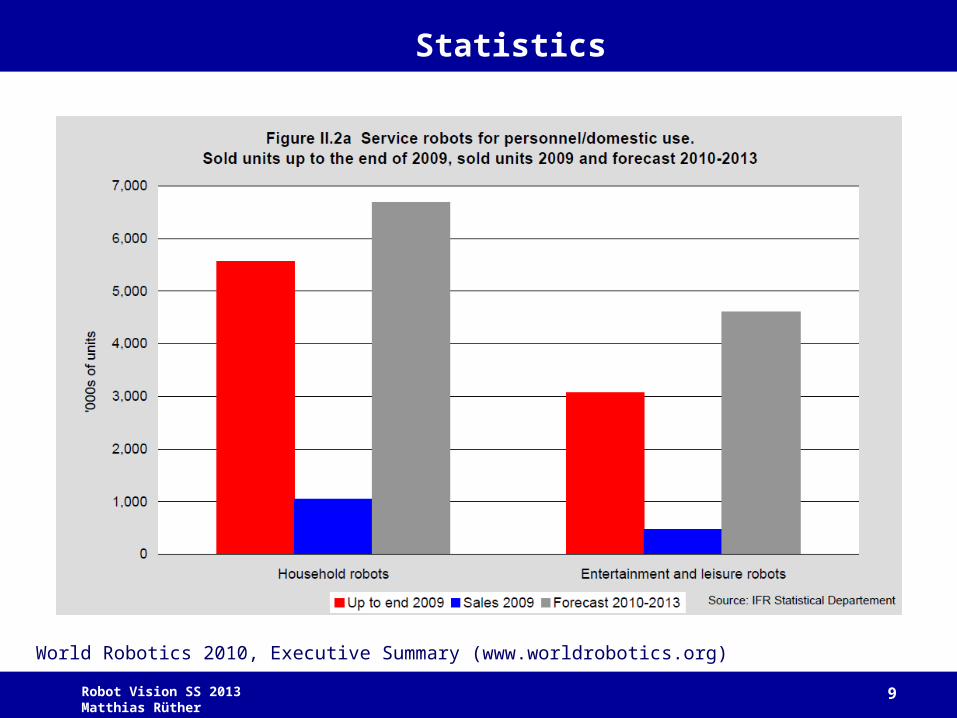
Statistics
World Robotics 2010, Executive Summary (www.worldrobotics.org)
Robot Vision SS 2013 Matthias Rüther 9
Statistics
World Robotics 2010, Executive Summary (www.worldrobotics.org)

Robot Vision SS 2013 Matthias Rüther 10
Vision Sensors
Passive (Multi-) Camera Systems
[Yasutaka Furukawa and Jean Ponce, Accurate, Dense, and Robust Multi-View Stereopsis, IEEE Transactions on Pattern Analysis and Machine Intelligence, 2009.]
Active Vision Sensors (Emitter/Receiver)
Robot Vision SS 2013 Matthias Rüther 11
Applications
Commercial: Body Scanning
http://rvlab.icg.tugraz.at/project_page/project_virtual_dressingroom/project_virtual_dressingroom.htm
Robot Vision SS 2013 Matthias Rüther 12
Applications
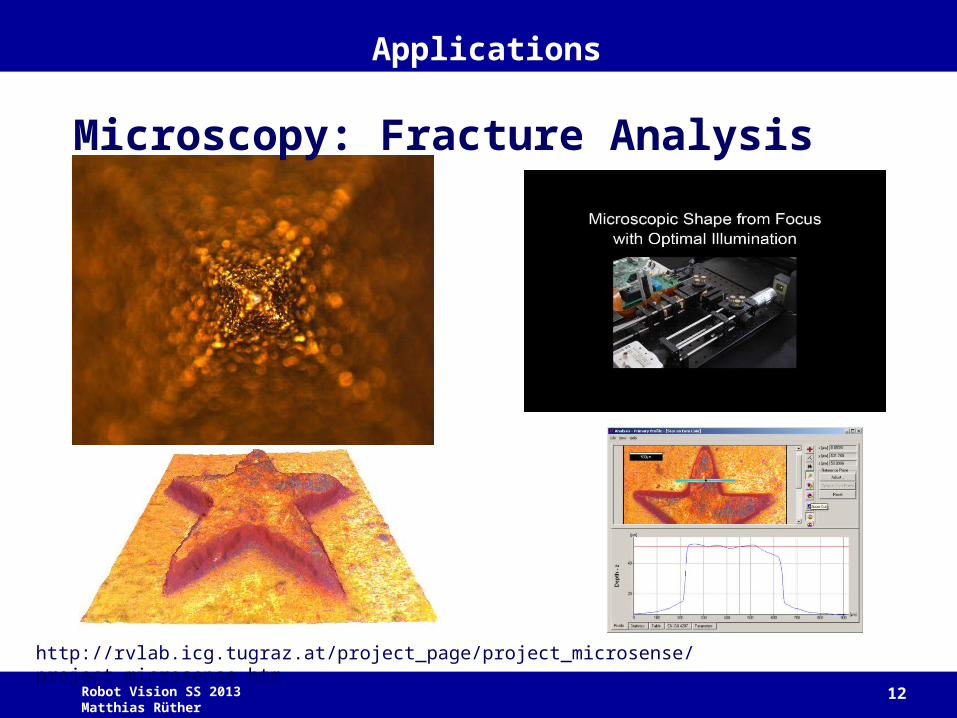
Microscopy: Fracture Analysis
http://rvlab.icg.tugraz.at/project_page/project_microsense/project_microsense.htm
Robot Vision SS 2013 Matthias Rüther 13
Applications
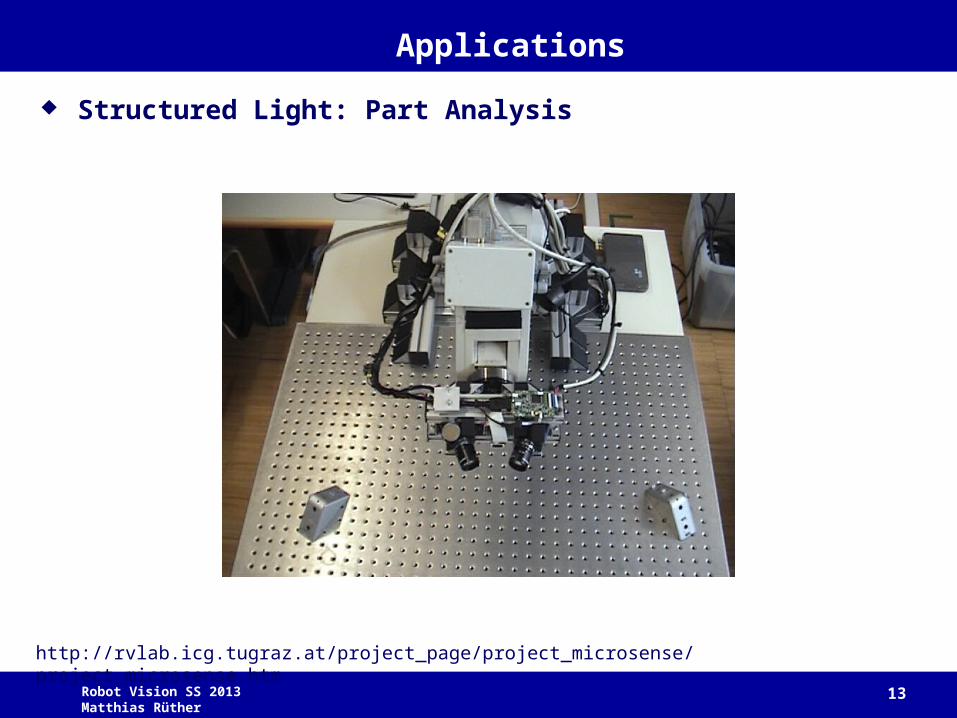
Structured Light: Part Analysis
http://rvlab.icg.tugraz.at/project_page/project_microsense/project_microsense.htm
Robot Vision SS 2013 Matthias Rüther 14
Applications
Visual SLAM
http://rvlab.icg.tugraz.at/project_page/project_monoslam/project_monoslam.htm
Robot Vision SS 2013 Matthias Rüther 15
Applications
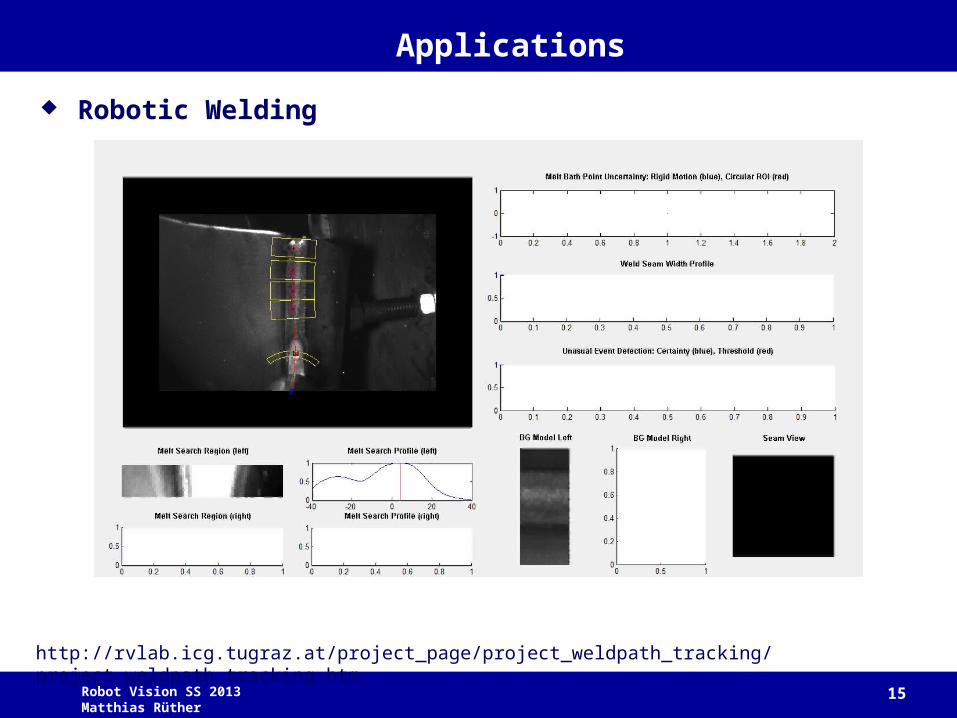
Robotic Welding
http://rvlab.icg.tugraz.at/project_page/project_weldpath_tracking/project_weldpath_tracking.htm
Robot Vision SS 2013 Matthias Rüther 16
Applications
Catadioptric Pose Estimation
http://rvlab.icg.tugraz.at/project_page/project_silhouette/project_silhouette.htm
Robot Vision SS 2013 Matthias Rüther 17
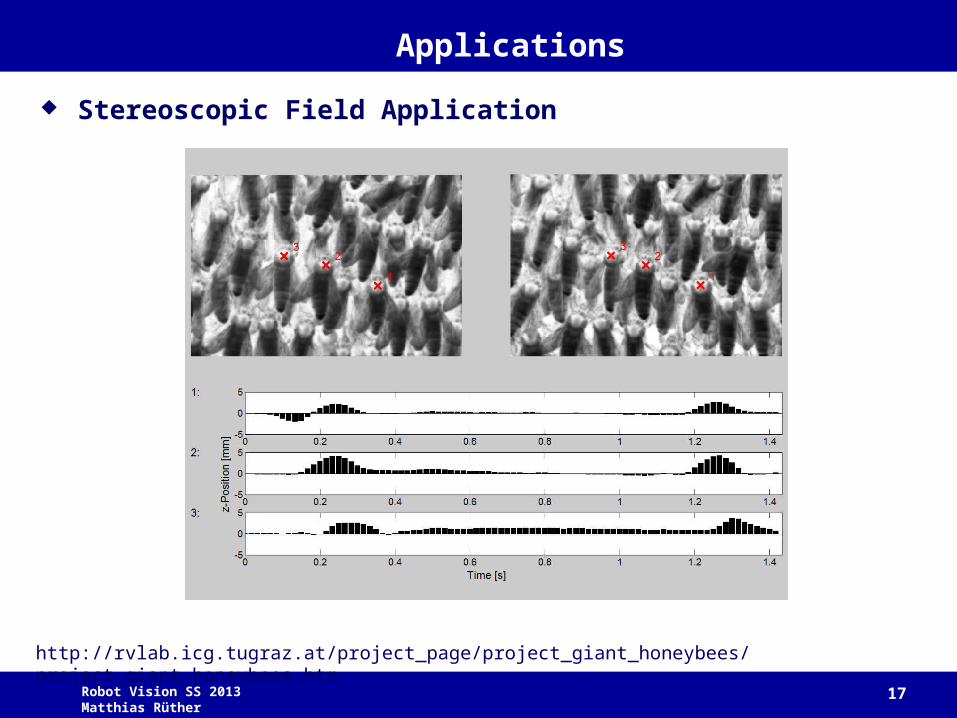
Applications
Stereoscopic Field Application
http://rvlab.icg.tugraz.at/project_page/project_giant_honeybees/project_giant_honeybees.htm